Vlad Estivill-Castro. Robots for People (2016) --- A project for intelligent integrated systems
|
|
|
- Aubrie Matthews
- 6 years ago
- Views:
Transcription
1 1 Vlad Estivill-Castro Robots for People (2016) --- A project for intelligent integrated systems
 IIIS V.")
2 Thanks for your interest Vlad Estivill-Castro School of Information and Communication Technology Institute for Intelligent and Integrated Systems (many collaborators) IIIS V. Estivill-Castro 2
3 What does robotics involve? Software Engineering Mechatronics engineering Artificial intelligence Agent technology Networking Operating systems EVERYTHING (physics/physical work) IIIS V. Estivill-Castro 3
4 Software Engineering Software engineering (SE) is concerned with developing and maintaining l software systems that behave reliably and efficiently, l software applications that are affordable to develop and maintain, and satisfy all the requirements that customers have defined for them. It is important because of the impact of large, expensive software systems and the role of software in safety-critical applications. It integrates significant mathematics, computer science and practices whose origins are in engineering. IIIS V. Estivill-Castro 4
5 Building software with capacities we associate with human intelligence (handle/solve unseen problems well) Artificial Intelligence IIIS V. Estivill-Castro 5
6 Artificial intelligence plan understand language learn negotiate / work in teams be strategic optimize (trade-off) solve problems be creative IIIS V. Estivill-Castro 6
7 A central project for intelligent integrated systems The development of autonomous mobile robots for multi-modal interaction with humans leading to useful applications integrating agent technology, HCI, AI, image processing, robotics, vision, planing, problem solving, game theory, machine learning, voice recognition, sensor fusion, emotional reactions and advanced research in areas of intelligent integrated systems participation with prototypes in international benchmarks that have academic and industrial recognition RoboCup Soccer, Agent-Poker, Open Game Play IIIS V. Estivill-Castro 7
8 Many many interesting jobs in Software Engineering Creative and fun things 8dyk Flying Robot Rockstars JKQ A presentation of the Giraff robot IIIS V. Estivill-Castro 8
9 Software Engineering and Robotics pfty?rel=0 FlzSU pfty?rel=0 IIIS V. Estivill-Castro 9

10 The satisfaction of achievement IIIS V. Estivill-Castro 10

11 Hypothesis (1) In the not so distant future humans will be surrounded by all sorts In the not so distant future humans will be of surrounded `intelligent by all sorts of `intelligent machines machines Intelligent buildings and Sensitive computing Computing environment intended to assist the user for retrieving, organizing and interpreting available information resources by augmenting and extending the sensory as well as the cognitive capabilities of the user Ambient Intelligence / Tele-presence IIIS V. Estivill-Castro 11


12 Hypothesis (2) The sector of the human population that is to benefit the most from `robots around us are people with disabilities, sick and rehabilitation patients, the elderly and pupils If technology is to reflect an advance society it should make an impact on improving the life of its weak/disadvantaged/untrained members IIIS V. Estivill-Castro 12


13 Hypothesis (3) A convergence is looming on Information and Communication Technologies Mobile phones, PDAs, Wireless/Internet and Intranets through computer watches Wearable computers IIIS V. Estivill-Castro 13
14 Hypothesis (4) There is a shift from accessible computing to user centered design in the Human- Computer Interaction community Accessibility Providing accessibility means removing barriers that prevent people with disabilities from participating in substantial life activities UCD Focusing on the product's potential users from the very beginning, and checking at each step of the way with these users to be sure they will like and be comfortable with the final design. IIIS V. Estivill-Castro 14

15 Hypothesis (5) The fields of artificial intelligence, robotics, machine learning, humancomputer interaction are advancing in research that integrates advances from different fields shows deployment of the technology in demonstrable prototypes IIIS V. Estivill-Castro 15

16 Hypothesis (6) The interface may not be a robot The actuators and sensors can be remote Not all of them on board of the robot The control may not be on board of the mobile components But the technologies developed will have use in all the applications emerging from this flexibility. IIIS V. Estivill-Castro 16


17 Hypothesis (7) Agent technology is influencing everyday life Computer Games Age of Empires Age of Mythology Xbox/PlayStation/Wii Tamagochi/Nintendo DS Environments Dofus Runescape Club Penguin 2nd Life Automatic assistants ebay IIIS V. Estivill-Castro 17


18 What does robotics provide? Mobility/autonomy Embodiment Physical presence Teams of robots Collective abilities / remote control IIIS V. Estivill-Castro 18



19 Robotics has penetrated the home market Toys Lego Mindstorms TM Cindy Smart TM IIIS V. Estivill-Castro 19


20 Robots on children s bedrooms IIIS V. Estivill-Castro 20



21 Robotics has penetrated human environments Home artifacts The EUREKA Robo Vac TM Electrolux Trilobite TM Guides for visitors in museums and the elderly visitors in airports IIIS V. Estivill-Castro 21



22 Autonomous Vehicles / Robotic Cars are penetrating the Urban Environment IIIS V. Estivill-Castro 22

23 Robots are penetrating the media News readers Booking agents, traveling agents, ecommerce Robotic interfaces are more human-like The uncanny valley Environments/Virtual reality/attractions Opponents are simulated agents Is the matrix possible? Movies/Special effects Military Entertainment parks IIIS V. Estivill-Castro 23

24 Ramifications Motion control pick up the cards / move bricks or chips Image processing recognize opponents partners actions / gestures cards / figures Agent technology reasoning / game play/ knowledge representation Multi-modal sound / motion / speech Virtual games / tele-presence IIIS V. Estivill-Castro 24
25 25 Research directions HCI Reasoning Software Engineering for Robots

26 RoboCup 2013 Papers produced by Master Students V. Estivill-Castro and J. Ferrer-Mestres Path-finding for mobile robots in dynamic environments with PDDL-planners 6th International Conference on Advanced Robotics, ICAR 2013, Montevideo, Uruguay, November 2529th to appear V. Estivill-Castro and J. Radev Humanoids Learning who are Teammates and who are Opponents The 8th Workshop on Humanoid Soccer Robots, at 13th IEEE-RAS International Conference on Humanoid Robots, Atlanta, GA, October 15th, to appear. IIIS V. Estivill-Castro 26
27 RoboCup Goal keeper positioning on lines Tracking and messaging with coaching Robot position of the ball Goal keeper picking up the ball Proper localization Team strategies Only one illegal defender Smooth motion IIIS V. Estivill-Castro 27
28 28 Research directions HCI Reasoning Software Engineering for Robots

29 Robots to guide the blind Can we effectively use multi-modal interfaces in autonomous mobile robots at least to facilitate humancomputer interaction? IIIS V. Estivill-Castro 29
30 Interaction with blind toddlers IIIS V. Estivill-Castro 30



31 Far more complexity for issues of HCI The sudden moves in a robot are far more distressing that the sudden actions of programs on a screen. IIIS V. Estivill-Castro 31
32 Multi-modal interactions IIIS V. Estivill-Castro 32

33 A famous example Interaction between intelligent system and patients Health Behavior Advisor System Reported in [Kaplan et al 1999] Generated sociable attitudes in the patients to an artificial system Positive effect on health habits IIIS V. Estivill-Castro 33


34 Focusing on a prototype leads to links with other areas Research in education Meaningful play is learning IIIS V. Estivill-Castro 34

35 Work on Human-Robot Interaction Tools for advancing education in children who are blind Milti-modal interface for blind adults A large study of children s attitudes an interactions towards robots acceptability as a companion and rejection of the machine/instrument concept IIIS V. Estivill-Castro 35


36 Our revisions: Back felt Fuzzy head Plastic texture IIIS V. Estivill-Castro 36
37 Robots provide to the blind what was lost when text interfaces where replaced by GUIs Mobile robots for an interface for people who are blind Provide a multi-modal mobile interface for ambient intelligence Enable mnemonic commands Allow rapid learning IIIS V. Estivill-Castro 37
38 Look and feel goes a long way on what the user expect Dogs don t sign - a 6 year old child who is blind. The user of a robot is dissatisfied with the mismatch with the expectations. IIIS V. Estivill-Castro 38
39 39 Research directions HCI Reasoning Software Engineering for Robots

40 Reasoning Deriving conclusions from facts Apparently, a fundamental characteristic of intelligence An expected aspect of intelligent systems Withdrawing conclusions in the light of new evidence is a capability usually referred to as non-monotonic reasoning IIIS V. Estivill-Castro 40
41 Non-Monotonic Reasoning A form of Common Sense Retract previous conclusions in the light of new evidence 1. Planes usually leave on time. 2. My flight leaves at 11:00 am. 3. Therefore, I should be at the airport at 9:00am. 4. My flight is cancelled. 5. Makes no sense to take actions for going to the airport early. IIIS V. Estivill-Castro 41

42 Our environment RoboCup A test-bed for Multi-Agent Systems We know our environment, so one would expect to be able to construct a knowledge base and apply reasoning IIIS V. Estivill-Castro 42


43 RoboCup soccer is a challenging environment Non-deterministic I can not predict the state of the environment after I perform an action Not accessible I can not sense all elements of the environment Dynamic Environment changes while I decide what action to take Teams I need to negotiate, collaborate, distribute tasks and goals Adversaries Of unknown capabilities IIIS V. Estivill-Castro 43
44 We demonstrate reasoning within the task of localization Dynamically selecting proper inputs for localization The classical example in RoboCup is that A frame where both goals are visible indicates something wrong with the object recognition task IIIS V. Estivill-Castro 44
45 Our approach Vision and Object Recognition Consistency Module Localization Algorithm IIIS V. Estivill-Castro 45
46 Our approach Consistency Module Non-monotonic logic that combines facts known about the environment with what is reported as visible in this frame IIIS V. Estivill-Castro 46
47 Why non-monotonic logic To reason about the inconsistent information provided by the sensors (vision) Without reasoning, all localization methods must determine Prob( visible scene position) IIIS V. Estivill-Castro 47

48 Illustration Naturally to develop rules systems where the new rules redefine exception to the previous ones 3 laws of robotics 1. A robot may not harm a human 2. A robot must obey a human unless it contradict law 1 3. A robot must protect itself unless contradicts rule 1 or 2 Ripple down rules Rules are defined and new rules are subsequently added to revise the cases not covered by the more general rules A tree that is a hierarchy of rules No formal reasoning IIIS V. Estivill-Castro 48

49 The module in action IIIS V. Estivill-Castro 49
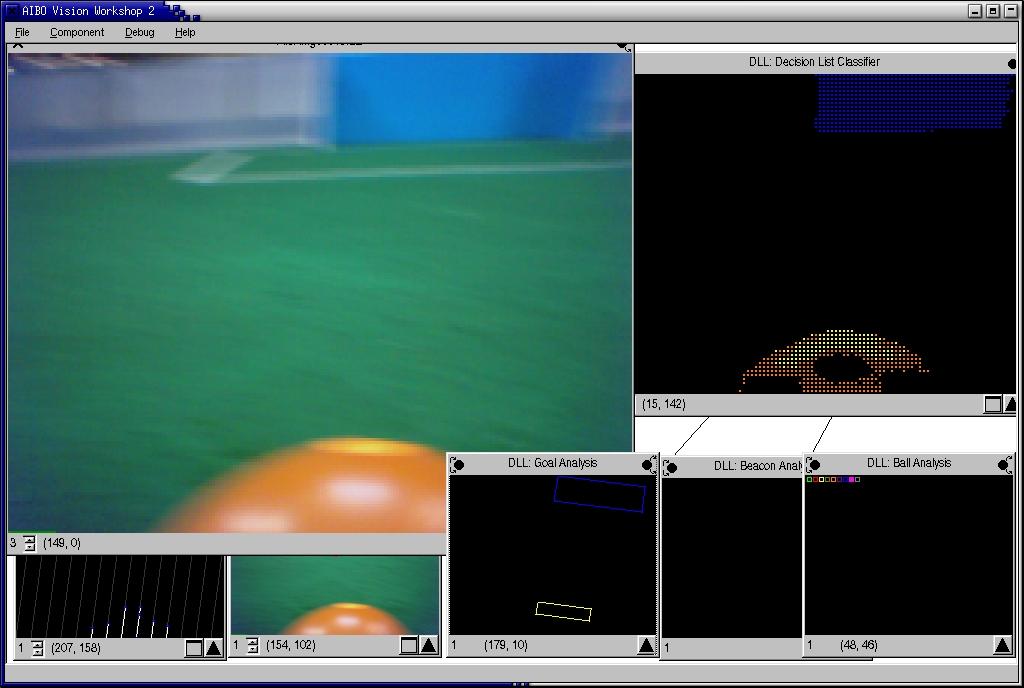
50 IIIS V. Estivill-Castro 50
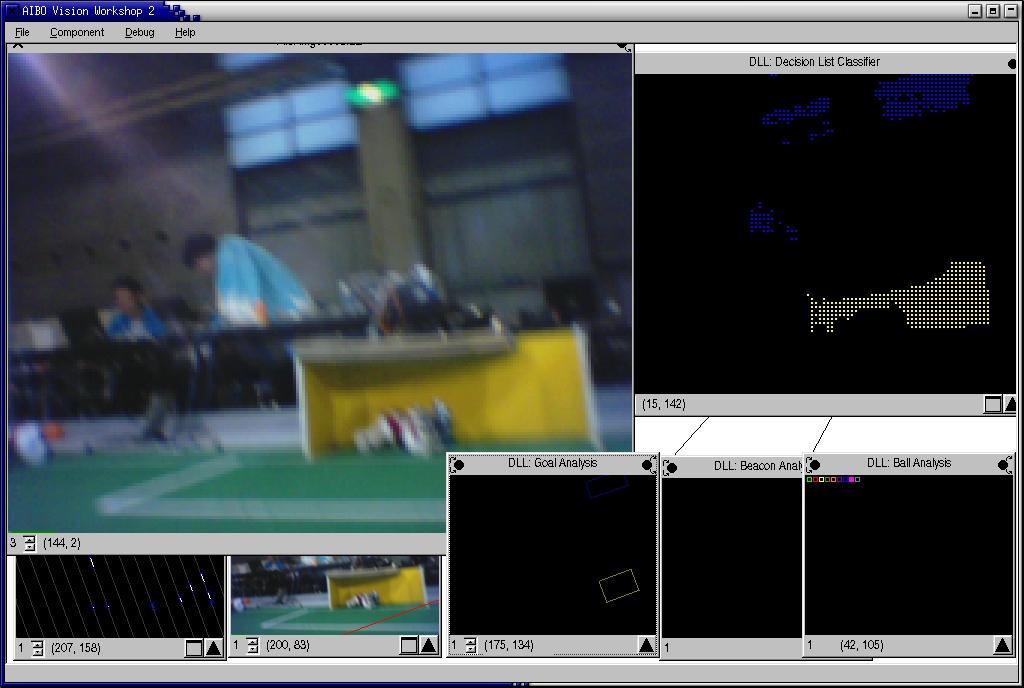
51 IIIS V. Estivill-Castro 51
52 52 Research directions HCI Reasoning Software Engineering for Robots
53 Engineering the behavior Using visual descriptions of the behaviour that incorporate formal logic Engineers use diagrams to model artefacts. Software Engineering has traditionally used diagrams to convey characteristics and descriptions of software IIIS V. Estivill-Castro 53
54 IIIS Game Controller- RoboCup 2011 GetUpFromFron t GetUpFromBac k Duration GetUpFromFron t GetUpFromBac k Duration GetUpFromFron t GetUpFromBac k Duration Pause TheyScore WeScore ForcedToBlueKi ckoff ForcedToRedKi ckoff INITIAL CHANGE_KICK _OFF CHANGE_TEAM READY SET PENALIZED PLAYING FINISHED initialreceived readyreceived shortchestbuttonpressed finishedreceived penaltyreceived ReadyOurGoal ReadyTheirGoal robotfallenback robotfallenforward playingreceived shortchestbuttonpressed ReadyOurGoal ReadyTheirGoal readyreceived playingreceived robotfallenback robotfallenforward setreceived UDPsaysRedKickOff UDPsaysBlueKickOff robotfallenforward robotfallenback TRUE TRUE leftfootbumppressed rightfootbumppressed shortchestbuttonpressed readyreceived TRUE TRUE TRUE TRUE TRUE TRUE TRUE TRUE TRUE TRUE TRUE TRUE TRUE TRUE rst_n V. Estivill-Castro 54


55 Illustration with state diagrams s 1 s 1 c 1 =event u c 2 =event v s i s j Exclusivity c i Ùc j = false " i j Exhaustivity s i c t =event x s p Ú i=1n c i = true IIIS V. Estivill-Castro 55
56 Requirements (One-Minute Microwave Oven) Requirements R1 R2 R3 R4 R5 R6 R7 Description There is a single control button available for the use of the oven. If the oven is closed and you push the button, the oven will start cooking (that is, energize the power-tube) for one minute If the button is pushed while the oven is cooking, it will cause the oven to cook for an extra minute. Pushing the button when the door is open has no effect. Whenever the oven is cooking or the door is open, the light in the oven will be on. Opening the door stops the cooking. and stops the timer and does not clear the timer Closing the door turns off the light. This is the normal idle state, prior to cooking when the user has placed food in the oven. If the oven times out, the light and the power-tube are turned off and then a beeper emits a warning beep to indicate that the cooking has finished. IIIS V. Estivill-Castro 56
57 The DPL+State_Machine approach Step 1: Consider writing the script of music for an orchestra. Write individual scripts and place together all actuators that behave with the same actions for the same cues Example: The control of the tube (energizing), the fan and the spinning plate IIIS V. Estivill-Castro 57
58 Step 2: Describe the conditions that result in the need to change state % MicrowaveCook.d name{microwavecook}. input{timeleft}. input{dooropen}. C0: {} => ~cook. C1: timeleft => cook. C1 > C0. C2: dooropen => ~cook. C2 > C1. output{b cook, "cook"}. Action: Posting a message to the whiteboard IIIS V. Estivill-Castro 58
59 Step 1 (again): Analyze another actuator Illustration: The light IIIS V. Estivill-Castro 59
60 Step 2 (again): Describe the conditions that result in the need to change state % MicrowaveLight.d name{microwavelight}. input{timeleft}. input{dooropen}. L0: {} => ~lighton. L1: timeleft => lighton. L1 > L0. L2: dooropen => lighton. L2 > L0. output{b lighton, "lighton"}. IIIS V. Estivill-Castro 60
61 A logic for looking after the lady 1. Usually there is no reason for alarm 2. The absence of owner for a long time is reason for alarm (this takes precedence over rule 1) 3. Lying usually results from a fall 4. A fall is usually a reason for alarm (this takes precedence over rule 1) 5. Being on bed is not a fall (this takes precedence over rule 4) 6. Lying for a long time means owner is not getting up. 7. Not getting up is a reason for alarm (this takes precedence over rule 1) 8. If it is night, it is fine not to get up (this takes precedence over rule 7) 9. If there is a stranger looming over the lady, it is reason for an alarm (takes precedence over rule 1) 10.Owner can t be absent while on bed, or lying or lying for a long time. 11.Owner can t be lying for a long time without lying for a short time. IIIS V. Estivill-Castro 61
62 Diagrams a la Petri nets IIIS V. Estivill-Castro 62



63 Prototype demonstrated at 2007 It s cool ALARM IIIS V. Estivill-Castro 63

64 A diagram for a poker player IIIS V. Estivill-Castro 64



65 Systems interacting with humans IIIS V. Estivill-Castro 65

66 Interaction in games with incomplete information IIIS V. Estivill-Castro 66
67 Summary A focused project Humanoid that interactively plays team games of incomplete information with humans Enables research on intelligent/smart devices We can postulate the use of intelligent capabilities to enhance the life of humans care / assistance / education / tele-presence Keep in mind it is more important to improve the condition of human living than to imitate it. IIIS V. Estivill-Castro 67
68 The course Five practical challenges NXT idempotent interface Reactive Robot Kalman filter Localization/Navigation Project (free) IIIS V. Estivill-Castro 68
69 Honours (the transition to research) Read all the papers in MiPal publications Papers of your interest tele-presence /HCI Drop-in Challenge Dynamic middleware for clfsm Mining behaviour of a robot Planning/Modelling Continuous planning Immediate objectives localization/navigation for RoboCup Intelligent simulations/planning drop-in challenge clfsm for ROS IIIS V. Estivill-Castro 69

70 What is the course about? textbook Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza IIIS V. Estivill-Castro 70



71 IIIS V. Estivill-Castro 71
beestanbul RoboCup 3D Simulation League Team Description Paper 2012
 beestanbul RoboCup 3D Simulation League Team Description Paper 2012 Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek, and Sanem Sariel-Talay Artificial Intelligence
beestanbul RoboCup 3D Simulation League Team Description Paper 2012 Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek, and Sanem Sariel-Talay Artificial Intelligence
Open Research Online The Open University s repository of research publications and other research outputs
 Open Research Online The Open University s repository of research publications and other research outputs Developing an intelligent table tennis umpiring system Conference or Workshop Item How to cite:
Open Research Online The Open University s repository of research publications and other research outputs Developing an intelligent table tennis umpiring system Conference or Workshop Item How to cite:
the world s most advanced humanoid robot
 the world s most advanced humanoid robot 02 : ASIMO V2 : TECHNICAL GUIDE : ROBOT DEVELOPMENT : CONTENTS ROBOT DEVELOPMENT 3 HISTORY OF HUMANOIDS 5 ASIMO v1 7 ASIMO v2 16 THE FUTURE 18 Creating New Mobility
the world s most advanced humanoid robot 02 : ASIMO V2 : TECHNICAL GUIDE : ROBOT DEVELOPMENT : CONTENTS ROBOT DEVELOPMENT 3 HISTORY OF HUMANOIDS 5 ASIMO v1 7 ASIMO v2 16 THE FUTURE 18 Creating New Mobility
A new AI benchmark. Soccer without Reason Computer Vision and Control for Soccer Playing Robots. Dr. Raul Rojas
 Soccer without Reason Computer Vision and Control for Soccer Playing Robots Dr. Raul Rojas A new AI benchmark -computer vision in real time - embodied intelligence: mechanics - energy management - local
Soccer without Reason Computer Vision and Control for Soccer Playing Robots Dr. Raul Rojas A new AI benchmark -computer vision in real time - embodied intelligence: mechanics - energy management - local
Robot Soccer Challenge
 Robot Soccer Challenge Pre-Activity Quiz 1. What kind of wireless electrical connection can NXT robots use to communicate with other electrical devices (including other NXTs)? 2. Can you think of a way
Robot Soccer Challenge Pre-Activity Quiz 1. What kind of wireless electrical connection can NXT robots use to communicate with other electrical devices (including other NXTs)? 2. Can you think of a way
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
#19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS
 #19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS Final Research Report Luis E. Navarro-Serment, Ph.D. The Robotics Institute Carnegie Mellon University November 25, 2018. Disclaimer
#19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS Final Research Report Luis E. Navarro-Serment, Ph.D. The Robotics Institute Carnegie Mellon University November 25, 2018. Disclaimer
ICS 606 / EE 606. RoboCup and Agent Soccer. Intelligent Autonomous Agents ICS 606 / EE606 Fall 2011
 Intelligent Autonomous Agents ICS 606 / EE606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 RoboCup and Agent Soccer www.robocup.org Paper discussion The road to RoboCup 2050. Burkhard, H.D., Duhaut, D.,
Intelligent Autonomous Agents ICS 606 / EE606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 RoboCup and Agent Soccer www.robocup.org Paper discussion The road to RoboCup 2050. Burkhard, H.D., Duhaut, D.,
Lecturers. Multi-Agent Systems. Exercises: Dates. Lectures. Prof. Dr. Bernhard Nebel Room Dr. Felix Lindner Room
 Lecturers Multi-Agent Systems Prof. Dr. Bernhard Nebel Room 52-00-028 Phone: 0761/203-8221 email: nebel@informatik.uni-freiburg.de Albert-Ludwigs-Universität Freiburg Dr. Felix Lindner Room 52-00-043 Phone:
Lecturers Multi-Agent Systems Prof. Dr. Bernhard Nebel Room 52-00-028 Phone: 0761/203-8221 email: nebel@informatik.uni-freiburg.de Albert-Ludwigs-Universität Freiburg Dr. Felix Lindner Room 52-00-043 Phone:
Learning of Cooperative actions in multi-agent systems: a case study of pass play in Soccer Hitoshi Matsubara, Itsuki Noda and Kazuo Hiraki
 From: AAAI Technical Report SS-96-01. Compilation copyright 1996, AAAI (www.aaai.org). All rights reserved. Learning of Cooperative actions in multi-agent systems: a case study of pass play in Soccer Hitoshi
From: AAAI Technical Report SS-96-01. Compilation copyright 1996, AAAI (www.aaai.org). All rights reserved. Learning of Cooperative actions in multi-agent systems: a case study of pass play in Soccer Hitoshi
Rulebook Revision 2016 v1.0 Published September 18, 2015 Sponsored By
 Rulebook Revision 2016 v1.0 Published September 18, 2015 Sponsored By 1 Table of Contents 1 General Overview... 3 1.1 General Team Rules... 3 2 Mini-Urban Challenge... 4 2.1 The Challenge... 4 2.2 Navigation...
Rulebook Revision 2016 v1.0 Published September 18, 2015 Sponsored By 1 Table of Contents 1 General Overview... 3 1.1 General Team Rules... 3 2 Mini-Urban Challenge... 4 2.1 The Challenge... 4 2.2 Navigation...
Rescue Rover. Robotics Unit Lesson 1. Overview
 Robotics Unit Lesson 1 Overview In this challenge students will be presented with a real world rescue scenario. The students will need to design and build a prototype of an autonomous vehicle to drive
Robotics Unit Lesson 1 Overview In this challenge students will be presented with a real world rescue scenario. The students will need to design and build a prototype of an autonomous vehicle to drive
2017 SCRUM GUIDE CHANGES USES OF SCRUM (NEW SECTION) 2017 CONTENT CHANGES AND ADDITIONS
 2017 CONTENT CHANGES AND ADDITIONS") 2017 SCRUM GUIDE CHANGES In November 2017, Ken Schwaber and Jeff Sutherland, creators and authors of the Scrum Guide, made updates to the document. The changes, which include the addition of a new section
2017 SCRUM GUIDE CHANGES In November 2017, Ken Schwaber and Jeff Sutherland, creators and authors of the Scrum Guide, made updates to the document. The changes, which include the addition of a new section
Robot motion by simultaneously wheel and leg propulsion
 Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
A Developmental Approach. To The Soccer Learning Process
 A Developmental Approach To The Soccer Learning Process Soccer by definition Soccer is a game played between 2 teams and each team is trying to score more goals than the other team. Soccer games are decided
A Developmental Approach To The Soccer Learning Process Soccer by definition Soccer is a game played between 2 teams and each team is trying to score more goals than the other team. Soccer games are decided
Neural Network in Computer Vision for RoboCup Middle Size League
 Journal of Software Engineering and Applications, 2016, *,** Neural Network in Computer Vision for RoboCup Middle Size League Paulo Rogério de Almeida Ribeiro 1, Gil Lopes 1, Fernando Ribeiro 1 1 Department
Journal of Software Engineering and Applications, 2016, *,** Neural Network in Computer Vision for RoboCup Middle Size League Paulo Rogério de Almeida Ribeiro 1, Gil Lopes 1, Fernando Ribeiro 1 1 Department
1001ICT Introduction To Programming Lecture Notes
 1001ICT Introduction To Programming Lecture Notes School of Information and Communication Technology Griffith University Semester 2, 2015 1 4 Lego Mindstorms 4.1 Robotics? Any programming course will set
1001ICT Introduction To Programming Lecture Notes School of Information and Communication Technology Griffith University Semester 2, 2015 1 4 Lego Mindstorms 4.1 Robotics? Any programming course will set
Reducing Hydraulic Capacity Flood Risk through Monitoring and Autonomous Local Control. Prof Pete Skipworth, EMS
 Reducing Hydraulic Capacity Flood Risk through Monitoring and Autonomous Local Control Prof Pete Skipworth, EMS Types of Flooding Inundation flooding e.g. a river bursts its banks Hydraulic incapacity
Reducing Hydraulic Capacity Flood Risk through Monitoring and Autonomous Local Control Prof Pete Skipworth, EMS Types of Flooding Inundation flooding e.g. a river bursts its banks Hydraulic incapacity
The Application of Pedestrian Microscopic Simulation Technology in Researching the Influenced Realm around Urban Rail Transit Station
 Journal of Traffic and Transportation Engineering 4 (2016) 242-246 doi: 10.17265/2328-2142/2016.05.002 D DAVID PUBLISHING The Application of Pedestrian Microscopic Simulation Technology in Researching
Journal of Traffic and Transportation Engineering 4 (2016) 242-246 doi: 10.17265/2328-2142/2016.05.002 D DAVID PUBLISHING The Application of Pedestrian Microscopic Simulation Technology in Researching
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas
 Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
The NXT Generation. A complete learning solution
 The NXT Generation A complete learning solution 2008 The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts
The NXT Generation A complete learning solution 2008 The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts
Flock Theory, Applied (To Scrum)
") Flock Theory, Applied (To Scrum) James Brett James.brett@ScrumMaster.com.au www.scrummaster.com.au February 2009 Contents CONTENTS... 2 INTRODUCTION... 3 WHAT IS FLOCK THEORY?... 4 DISTANCE OPTIMIZATION...
Flock Theory, Applied (To Scrum) James Brett James.brett@ScrumMaster.com.au www.scrummaster.com.au February 2009 Contents CONTENTS... 2 INTRODUCTION... 3 WHAT IS FLOCK THEORY?... 4 DISTANCE OPTIMIZATION...
Training Fees 3,400 US$ per participant for Public Training includes Materials/Handouts, tea/coffee breaks, refreshments & Buffet Lunch.
 Training Title DISTRIBUTED CONTROL SYSTEMS (DCS) 5 days Training Venue and Dates DISTRIBUTED CONTROL SYSTEMS (DCS) Trainings will be conducted in any of the 5 star hotels. 5 22-26 Oct. 2017 $3400 Dubai,
Training Title DISTRIBUTED CONTROL SYSTEMS (DCS) 5 days Training Venue and Dates DISTRIBUTED CONTROL SYSTEMS (DCS) Trainings will be conducted in any of the 5 star hotels. 5 22-26 Oct. 2017 $3400 Dubai,
Performance Indicators (examples) Responds correctly to questions about own name, sex and age
 Responds correctly to questions about own name, sex and age") The Scholastic Early Childhood Program correlated to the Section 1: Speech and Language Development Language Development Communication Receptive Language Listens with understanding and interest to conversations,
The Scholastic Early Childhood Program correlated to the Section 1: Speech and Language Development Language Development Communication Receptive Language Listens with understanding and interest to conversations,
Genetic Algorithm Optimized Gravity Based RoboCup Soccer Team
 Genetic Algorithm Optimized Gravity Based RoboCup Soccer Team Tory Harter Advisor: Dr. Jon Denning Taylor University July 28, 2015 ABSTRACT This report describes how we use genetic algorithms to optimize
Genetic Algorithm Optimized Gravity Based RoboCup Soccer Team Tory Harter Advisor: Dr. Jon Denning Taylor University July 28, 2015 ABSTRACT This report describes how we use genetic algorithms to optimize
RoboCup Standard Platform League (NAO) Technical Challenges
 Technical Challenges") RoboCup Standard Platform League (NAO) Technical Challenges RoboCup Technical Committee (2014 rules, as of June 19, 2014) At RoboCup 2014, the Standard Platform League will hold three different technical
RoboCup Standard Platform League (NAO) Technical Challenges RoboCup Technical Committee (2014 rules, as of June 19, 2014) At RoboCup 2014, the Standard Platform League will hold three different technical
Standard League WRO Football Simple Simon EV3 Training Curriculum
 Standard League WRO Football Simple Simon EV3 Training Curriculum Brian Thomas **LEGO, EV3 Mindstorms and Robolab are Registered Trademarks of the LEGO Corporation RoboCup Junior Australia Inc Copyright
Standard League WRO Football Simple Simon EV3 Training Curriculum Brian Thomas **LEGO, EV3 Mindstorms and Robolab are Registered Trademarks of the LEGO Corporation RoboCup Junior Australia Inc Copyright
Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists
 Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists What is VENTURER? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate
Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists What is VENTURER? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate
Net$ync II. Net$ync II. System Controllers
 Net$ync II Net$ync II System Controllers Net$ync II Conductor System System Optimization The Quincy Net$ync II Conductor system selects the most efficient combination of compressors based on demand. Consistent,
Net$ync II Net$ync II System Controllers Net$ync II Conductor System System Optimization The Quincy Net$ync II Conductor system selects the most efficient combination of compressors based on demand. Consistent,
National Robotics Competition 2018 NRC WRO Challenge Manual
 National Robotics Competition 2018 NRC WRO Challenge Manual Page 1 of 13 A. Competition Categories World Robot Olympiad has three regular competition categories, and an Open category: 1. Regular Category
National Robotics Competition 2018 NRC WRO Challenge Manual Page 1 of 13 A. Competition Categories World Robot Olympiad has three regular competition categories, and an Open category: 1. Regular Category
Software Engineering. M Umair.
 Software Engineering M Umair www.m-umair.com Advantages of Agile Change is embraced With shorter planning cycles, it s easy to accommodate and accept changes at any time during the project. There is always
Software Engineering M Umair www.m-umair.com Advantages of Agile Change is embraced With shorter planning cycles, it s easy to accommodate and accept changes at any time during the project. There is always
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES
 ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
Distributed Control Systems
 Unit 41: Unit code Distributed Control Systems M/615/1509 Unit level 5 Credit value 15 Introduction With increased complexity and greater emphasis on cost control and environmental issues, the efficient
Unit 41: Unit code Distributed Control Systems M/615/1509 Unit level 5 Credit value 15 Introduction With increased complexity and greater emphasis on cost control and environmental issues, the efficient
Author s Name Name of the Paper Session. Positioning Committee. Marine Technology Society. DYNAMIC POSITIONING CONFERENCE September 18-19, 2001
 Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 18-19, 2001 POWER PLANT SESSION A New Concept for Fuel Tight DP
Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 18-19, 2001 POWER PLANT SESSION A New Concept for Fuel Tight DP
LEGO Engineering Conferences ROBOLAB and MINDSTORMS Education Version 4.5 March 2008
 LEGO Engineering Conferences ROBOLAB and MINDSTORMS Education Version 4.5 March 2008 NXT-G Program Book II: Intermediate Robotics Activities for use with the NXT 2008 Tufts Center for Engineering Education
LEGO Engineering Conferences ROBOLAB and MINDSTORMS Education Version 4.5 March 2008 NXT-G Program Book II: Intermediate Robotics Activities for use with the NXT 2008 Tufts Center for Engineering Education
Australian Standards. Constraints
 Design Brief The client, Mr. Vaughn Anderson, the Technology Coordinator at Lyndale Secondary College, has requested the design and construction a motor vehicle or other device which can be programmed
Design Brief The client, Mr. Vaughn Anderson, the Technology Coordinator at Lyndale Secondary College, has requested the design and construction a motor vehicle or other device which can be programmed
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Design of a Pedestrian Detection System Based on OpenCV. Ning Xu and Yong Ren*
 International Conference on Education, Management, Commerce and Society (EMCS 2015) Design of a Pedestrian Detection System Based on OpenCV Ning Xu and Yong Ren* Applied Technology College of Soochow University
International Conference on Education, Management, Commerce and Society (EMCS 2015) Design of a Pedestrian Detection System Based on OpenCV Ning Xu and Yong Ren* Applied Technology College of Soochow University
Brief Competition Novotel Hub School Design School s
 Brief Competition Novotel Hub School Design School s 2017 Novotel Today 2 Novotel, the hotel that thinks about everything... Our clients have different reasons to come to Novotel. Some travel alone, others
Brief Competition Novotel Hub School Design School s 2017 Novotel Today 2 Novotel, the hotel that thinks about everything... Our clients have different reasons to come to Novotel. Some travel alone, others
GD 0043/18 ACTIVE TRAVEL STRATEGY
 GD 0043/18 ACTIVE TRAVEL STRATEGY 2018-2021 May 2018 Minister s Introduction There is strong evidence that regular physical activity reduces the risk of a range of health conditions. The best way to increase
GD 0043/18 ACTIVE TRAVEL STRATEGY 2018-2021 May 2018 Minister s Introduction There is strong evidence that regular physical activity reduces the risk of a range of health conditions. The best way to increase
CAM Final Report John Scheele Advisor: Paul Ohmann I. Introduction
 CAM Final Report John Scheele Advisor: Paul Ohmann I. Introduction Herds are a classic complex system found in nature. From interactions amongst individual animals, group behavior emerges. Historically
CAM Final Report John Scheele Advisor: Paul Ohmann I. Introduction Herds are a classic complex system found in nature. From interactions amongst individual animals, group behavior emerges. Historically
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Partially Observable MDP Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
CS 4649/7649 Robot Intelligence: Planning Partially Observable MDP Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
LegenDary 2012 Soccer 2D Simulation Team Description Paper
 LegenDary 2012 Soccer 2D Simulation Team Description Paper Pourya Saljoughi 1, Reza Ma'anijou 1, Ehsan Fouladi 1, Narges Majidi 1, Saber Yaghoobi 1, Houman Fallah 1 and Saeideh Zahedi 1 1 Islamic Azad
LegenDary 2012 Soccer 2D Simulation Team Description Paper Pourya Saljoughi 1, Reza Ma'anijou 1, Ehsan Fouladi 1, Narges Majidi 1, Saber Yaghoobi 1, Houman Fallah 1 and Saeideh Zahedi 1 1 Islamic Azad
Process Control Loops
 In this section, you will learn about how control components and control algorithms are integrated to create a process control system. Because in some processes many variables must be controlled, and each
In this section, you will learn about how control components and control algorithms are integrated to create a process control system. Because in some processes many variables must be controlled, and each
Huntsman Polyurethanes smart simulation software. Process optimization by simulation
 Huntsman Polyurethanes smart simulation software Process optimization by simulation Understanding material behavior is fundamental to the design of new products. For non-linear materials such as molding
Huntsman Polyurethanes smart simulation software Process optimization by simulation Understanding material behavior is fundamental to the design of new products. For non-linear materials such as molding
Master s Project in Computer Science April Development of a High Level Language Based on Rules for the RoboCup Soccer Simulator
 Master s Project in Computer Science April 2006 Development of a High Level Language Based on Rules for the RoboCup Soccer Simulator José Ignacio Núñez Varela jnunez@cs.pitt.edu Department of Computer
Master s Project in Computer Science April 2006 Development of a High Level Language Based on Rules for the RoboCup Soccer Simulator José Ignacio Núñez Varela jnunez@cs.pitt.edu Department of Computer
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION Task and Rules Document
 NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
PSM I PROFESSIONAL SCRUM MASTER
 PSM I PROFESSIONAL SCRUM MASTER 1 Upon What kind of process control is SCRUM based? a) IDEAL b) SCRUM enterprise c) Empirical d) Agile 2 If burndown charts are used to visualize progress, what do they
PSM I PROFESSIONAL SCRUM MASTER 1 Upon What kind of process control is SCRUM based? a) IDEAL b) SCRUM enterprise c) Empirical d) Agile 2 If burndown charts are used to visualize progress, what do they
The CMUnited-98 Champion Small-Robot Team
 The CMUnited-98 Champion Small-Robot Team Manuela Veloso, Michael Bowling, Peter Stone Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {veloso,mhb,pstone}@cs.cmu.edu http://www.cs.cmu.edu/
The CMUnited-98 Champion Small-Robot Team Manuela Veloso, Michael Bowling, Peter Stone Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {veloso,mhb,pstone}@cs.cmu.edu http://www.cs.cmu.edu/
Introducing STAMP in Road Tunnel Safety
 Introducing STAMP in Road Tunnel Safety Kostis Kazaras National Technical University of Athens, Mechanical Engineering School, Greece Contact details: kkazaras@gmail.com kkaz@central.ntua.gr Problem illustration
Introducing STAMP in Road Tunnel Safety Kostis Kazaras National Technical University of Athens, Mechanical Engineering School, Greece Contact details: kkazaras@gmail.com kkaz@central.ntua.gr Problem illustration
Real-Time & Embedded Systems
 Real-Time & Embedded Systems Agenda Safety Critical Systems Project 6 continued Safety Critical Systems Safe enough looks different at 35,000 feet. Bruce Powell Douglass The Air Force has a perfect operating
Real-Time & Embedded Systems Agenda Safety Critical Systems Project 6 continued Safety Critical Systems Safe enough looks different at 35,000 feet. Bruce Powell Douglass The Air Force has a perfect operating
The following gives a brief overview of the characteristics of the most commonly used devices.
 SAFETY RELATED CONTROL SYSTEMS In a previous article we discussed the issues relating to machine safety systems focusing mainly on the PUWER regulations and risk assessments. In this issue will take this
SAFETY RELATED CONTROL SYSTEMS In a previous article we discussed the issues relating to machine safety systems focusing mainly on the PUWER regulations and risk assessments. In this issue will take this
Technology. Using Bluetooth
 Bluetooth is a communication technology that makes it possible to send and receive data without using wires. Using the Bluetooth features, you can set up a wireless connection between your NXT and other
Bluetooth is a communication technology that makes it possible to send and receive data without using wires. Using the Bluetooth features, you can set up a wireless connection between your NXT and other
UNIVERSITY OF WATERLOO
 UNIVERSITY OF WATERLOO Department of Chemical Engineering ChE 524 Process Control Laboratory Instruction Manual January, 2001 Revised: May, 2009 1 Experiment # 2 - Double Pipe Heat Exchanger Experimental
UNIVERSITY OF WATERLOO Department of Chemical Engineering ChE 524 Process Control Laboratory Instruction Manual January, 2001 Revised: May, 2009 1 Experiment # 2 - Double Pipe Heat Exchanger Experimental
Re: ENSC 440 Functional Specification for the Wall Climbing Robot. Dear Mr. Leung,
 Patrick Leung School of Engineering Science Simon Fraser University 8888 University Drive Burnaby, BC. V5A 1S6 Date 2/18/08 Re: ENSC 440 Functional Specification for the Wall Climbing Robot Dear Mr. Leung,
Patrick Leung School of Engineering Science Simon Fraser University 8888 University Drive Burnaby, BC. V5A 1S6 Date 2/18/08 Re: ENSC 440 Functional Specification for the Wall Climbing Robot Dear Mr. Leung,
RoboCup Soccer Leagues
 RoboCup Soccer Leagues Daniele Nardi, Sapienza University of Rome, Italy Itsuki Noda, National Institute of Advanced Industrial Science and Technology, Japan Fernando Ribeiro, University of Minho, Portugal
RoboCup Soccer Leagues Daniele Nardi, Sapienza University of Rome, Italy Itsuki Noda, National Institute of Advanced Industrial Science and Technology, Japan Fernando Ribeiro, University of Minho, Portugal
LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS
 LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS GARY B. PARKER and INGO CYLIAX Department of Computer Science, Indiana University, Bloomington, IN 47405 gaparker@cs.indiana.edu, cyliax@cs.indiana.edu
LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS GARY B. PARKER and INGO CYLIAX Department of Computer Science, Indiana University, Bloomington, IN 47405 gaparker@cs.indiana.edu, cyliax@cs.indiana.edu
FIRA ROBOT SOCCER COMPETITION. Robot Soccer Competition Singapore Robotic Games 2012 INTRODUCTION
 INTRODUCTION ROBOT SOCCER COMPETITION The objective of the robot soccer is to build a team of robots to play 5-a-side football against an opponent robot team. Each robot soccer team shall setup a global
INTRODUCTION ROBOT SOCCER COMPETITION The objective of the robot soccer is to build a team of robots to play 5-a-side football against an opponent robot team. Each robot soccer team shall setup a global
Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs
 Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs Jehyun Cho a, Ghang Lee a, Jongsung Won a and Eunseo Ryu a a Dept. of Architectural Engineering, University of Yonsei,
Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs Jehyun Cho a, Ghang Lee a, Jongsung Won a and Eunseo Ryu a a Dept. of Architectural Engineering, University of Yonsei,
Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit
 TEKS/LINKS Student Objectives One Credit") Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit Suggested Time Ranges First Six Weeks History of Manufacturing PFD 1.1(A) The student will describe why and how manufacturing
Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit Suggested Time Ranges First Six Weeks History of Manufacturing PFD 1.1(A) The student will describe why and how manufacturing
Boys and Girls Club Game
 Boys and Girls Club 2015-2016 Game The Game This year Skunk Works Robotics has designed our own version of a FIRST Lego League competition for you all to play. The image above this paragraph shows the
Boys and Girls Club 2015-2016 Game The Game This year Skunk Works Robotics has designed our own version of a FIRST Lego League competition for you all to play. The image above this paragraph shows the
Planning and Acting in Partially Observable Stochastic Domains
 Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Frequently Asked Questions
 Frequently Asked Questions Basic Facts What does the name ASIMO stand for? ASIMO stands for Advanced Step in Innovative Mobility. Who created ASIMO? ASIMO was developed by Honda Motor Co., Ltd, a world
Frequently Asked Questions Basic Facts What does the name ASIMO stand for? ASIMO stands for Advanced Step in Innovative Mobility. Who created ASIMO? ASIMO was developed by Honda Motor Co., Ltd, a world
THE UNIVERSITY OF HULL
 THE UNIVERSITY OF HULL Investigation of motivation in agents using the simulation of 5-aside football being a Thesis submitted for the Degree of Master of Science in the University of Hull by Humberto
THE UNIVERSITY OF HULL Investigation of motivation in agents using the simulation of 5-aside football being a Thesis submitted for the Degree of Master of Science in the University of Hull by Humberto
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud. Hydraulically Actuated Hexapod Robots. Design, Implementation. and Control.
 Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007.
 Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
Large Balls. Actual Supports Will be Different from Picture
 4 THE GAME [This section includes all modifications through Team Update 14] 4.1 GAME OVERVIEW The object of the game is to attain a higher score than your opponent alliance by delivering balls into goals,
4 THE GAME [This section includes all modifications through Team Update 14] 4.1 GAME OVERVIEW The object of the game is to attain a higher score than your opponent alliance by delivering balls into goals,
Introduction to Pneumatics
 Introduction to Pneumatics Pneumatics Symbols Air generation and distribution Table 1: Symbols use in energy conversion and preparation ITEM SYMBOL MEANING Compressor SUPPLY Pressure Source Pneumatic Pressure
Introduction to Pneumatics Pneumatics Symbols Air generation and distribution Table 1: Symbols use in energy conversion and preparation ITEM SYMBOL MEANING Compressor SUPPLY Pressure Source Pneumatic Pressure
The Sweaty 2018 RoboCup Humanoid Adult Size Team Description
 The Sweaty 2018 RoboCup Humanoid Adult Size Team Description Meyrem Sena Akbas, Martin Burkart, Klaus Dorer, André Friedrich, Lena Higel, Ulrich Hochberg (Team leader), Nils-Malte Jahn, Rudi Kirn, Mathias
The Sweaty 2018 RoboCup Humanoid Adult Size Team Description Meyrem Sena Akbas, Martin Burkart, Klaus Dorer, André Friedrich, Lena Higel, Ulrich Hochberg (Team leader), Nils-Malte Jahn, Rudi Kirn, Mathias
Simulation and mathematical modeling for racket position and attitude of table tennis
 Acta Technica 62 No. 3A/2017, 135 142 c 2017 Institute of Thermomechanics CAS, v.v.i. Simulation and mathematical modeling for racket position and attitude of table tennis Jiansi Song 1 Abstract. Racket
Acta Technica 62 No. 3A/2017, 135 142 c 2017 Institute of Thermomechanics CAS, v.v.i. Simulation and mathematical modeling for racket position and attitude of table tennis Jiansi Song 1 Abstract. Racket
The CS2N VEX Programming Challenge
 The 2013-14 CS2N VEX Programming Challenge Overview This section describes the Robotics Academy s Computer Science Student Network (CS2N) VEX Robot Programming Challenge. It also lists the game definitions
The 2013-14 CS2N VEX Programming Challenge Overview This section describes the Robotics Academy s Computer Science Student Network (CS2N) VEX Robot Programming Challenge. It also lists the game definitions
Dynamic Positioning Control Augmentation for Jack-up Vessels
 DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53. The design of exoskeleton lower limbs rehabilitation robot
 Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Lecture 1 Temporal constraints: source and characterization
 Real-Time Systems Lecture 1 Temporal constraints: source and characterization Basic concepts about real-time Requirements of Real-Time Systems Adapted from the slides developed by Prof. Luís Almeida for
Real-Time Systems Lecture 1 Temporal constraints: source and characterization Basic concepts about real-time Requirements of Real-Time Systems Adapted from the slides developed by Prof. Luís Almeida for
The Soccer Guy. By Marcus Hilgers Faisal Ahmad Jacob Borer
 The Soccer Guy By Marcus Hilgers Faisal Ahmad Jacob Borer 1.0 Abstract The Soccer Guy automaton was created to provide a fun, interactive, simple game. It uses simple mechanical and computational elements
The Soccer Guy By Marcus Hilgers Faisal Ahmad Jacob Borer 1.0 Abstract The Soccer Guy automaton was created to provide a fun, interactive, simple game. It uses simple mechanical and computational elements
WP Eliminating Oxygen from the Purge Gas and the use of Monitoring Equipment
 Part 4 WP - 269 Eliminating Oxygen from the Purge Gas and the use of Monitoring Equipment Even using specialised weld purging equipment does not guarantee defect free welds. Control of the oxygen content
Part 4 WP - 269 Eliminating Oxygen from the Purge Gas and the use of Monitoring Equipment Even using specialised weld purging equipment does not guarantee defect free welds. Control of the oxygen content
RoboCup-99 Simulation League: Team KU-Sakura2
 RoboCup-99 Team Descriptions Simulation League, Team KU-Sakura2, pages 74 78 http: /www.ep.liu.se/ea/cis/1999/007/16/ 74 RoboCup-99 Simulation League: Team KU-Sakura2 KU-Sakura2 Harukazu Igarashi, Shougo
RoboCup-99 Team Descriptions Simulation League, Team KU-Sakura2, pages 74 78 http: /www.ep.liu.se/ea/cis/1999/007/16/ 74 RoboCup-99 Simulation League: Team KU-Sakura2 KU-Sakura2 Harukazu Igarashi, Shougo
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
 http://en.wikipedia.org/wiki/darpa_grand_challenge - The Urban Challenge requires designers to build vehicles able to obey all traffic laws while they detect and avoid other robots on the course. This
http://en.wikipedia.org/wiki/darpa_grand_challenge - The Urban Challenge requires designers to build vehicles able to obey all traffic laws while they detect and avoid other robots on the course. This
if all agents follow RSS s interpretation then there will be zero accidents.
 RSS Concept RSS - Mobileye SFF - Nvidia Safety Goal Guaranteeing that an agent will never be involved in an accident is impossible. Hence, our ultimate goal is to guarantee that an agent will be careful
RSS Concept RSS - Mobileye SFF - Nvidia Safety Goal Guaranteeing that an agent will never be involved in an accident is impossible. Hence, our ultimate goal is to guarantee that an agent will be careful
Spacecraft Simulation Tool. Debbie Clancy JHU/APL
 FSW Workshop 2011 Using Flight Software in a Spacecraft Simulation Tool Debbie Clancy JHU/APL debbie.clancy@jhuapl.edu 443-778-7721 Agenda Overview of RBSP and FAST Technical Challenges Dropping FSW into
FSW Workshop 2011 Using Flight Software in a Spacecraft Simulation Tool Debbie Clancy JHU/APL debbie.clancy@jhuapl.edu 443-778-7721 Agenda Overview of RBSP and FAST Technical Challenges Dropping FSW into
Our journey a 20 year Transport Manifesto for the North East
 Our journey a 20 year Transport Manifesto for the North East Sustrans submission to North East Combined Authority (NECA). March 2016 Summary Sustrans is a leading UK charity enabling people to travel by
Our journey a 20 year Transport Manifesto for the North East Sustrans submission to North East Combined Authority (NECA). March 2016 Summary Sustrans is a leading UK charity enabling people to travel by
Diver Training Options
 MAIN INTERNET ON-SITE TAILORED PACKAGES INTER-COMPANY Diver Training Options DBI offers a menu of tailored courses Designed for users as well as IT Professionals to learn how to master the functionality
MAIN INTERNET ON-SITE TAILORED PACKAGES INTER-COMPANY Diver Training Options DBI offers a menu of tailored courses Designed for users as well as IT Professionals to learn how to master the functionality
A COMPREHENSIVE APPROACH TO TRANSPORTATION AT SUNTRUST PARK AND THE BATTERY ATLANTA
 A COMPREHENSIVE APPROACH TO TRANSPORTATION AT SUNTRUST PARK AND THE BATTERY ATLANTA Overview The Atlanta Braves strategically selected the location for SunTrust Park to provide an environment rich in transportation
A COMPREHENSIVE APPROACH TO TRANSPORTATION AT SUNTRUST PARK AND THE BATTERY ATLANTA Overview The Atlanta Braves strategically selected the location for SunTrust Park to provide an environment rich in transportation
GOLFER. The Golf Putting Robot
 GOLFER The Golf Putting Robot Written By Wing Pan Yuen For EEL 5666 Intelligent Machines Design Laboratory December 05, 1999 Table of Contents Abstract Introduction Executive Summary Integrated System
GOLFER The Golf Putting Robot Written By Wing Pan Yuen For EEL 5666 Intelligent Machines Design Laboratory December 05, 1999 Table of Contents Abstract Introduction Executive Summary Integrated System
AN UNDERWATER AUGMENTED REALITY SYSTEM FOR COMMERCIAL DIVING OPERATIONS
 SYSTEM FOR COMMERCIAL DIVING OPERATIONS ROGELIO!MORALES-GARCÍA, PETER!KEITLER,!PATRICK!MAIER, GUDRUN!KLINKER! FACHGEBIET AUGMENTED (FAR) OCEANS '09 MTS/IEEE BILOXI "MARINE TECHNOLOGY FOR OUR FUTURE: GLOBAL
SYSTEM FOR COMMERCIAL DIVING OPERATIONS ROGELIO!MORALES-GARCÍA, PETER!KEITLER,!PATRICK!MAIER, GUDRUN!KLINKER! FACHGEBIET AUGMENTED (FAR) OCEANS '09 MTS/IEEE BILOXI "MARINE TECHNOLOGY FOR OUR FUTURE: GLOBAL
unsignalized signalized isolated coordinated Intersections roundabouts Highway Capacity Manual level of service control delay
 Whether unsignalized or signalized, isolated or coordinated, you can use TransModeler to simulate intersections with greater detail and accuracy than any other microsimulation software. TransModeler allows
Whether unsignalized or signalized, isolated or coordinated, you can use TransModeler to simulate intersections with greater detail and accuracy than any other microsimulation software. TransModeler allows
Clinton Keith. Scrum Essentials for Game Teams. Clinton Keith Scott Crabtree. Thursday, March 1, 12. Presented by. Scrum is a simple framework
 Scrum Essentials for Game Teams ing seats We ll be mov art this st e before w don t unpack morning, so yet! Presented by Clinton Keith Scott Crabtree 1 Clinton Keith 2 3 Today Scrum is a simple framework
Scrum Essentials for Game Teams ing seats We ll be mov art this st e before w don t unpack morning, so yet! Presented by Clinton Keith Scott Crabtree 1 Clinton Keith 2 3 Today Scrum is a simple framework
Sony Four Legged Robot Football League Rule Book
 Sony Four Legged Robot Football League Rule Book RoboCup Technical Committee (As of June 9, 2003) 1 Rules are classified into several categories 1. Setup of the environment 2. Robot players 3. Game process
Sony Four Legged Robot Football League Rule Book RoboCup Technical Committee (As of June 9, 2003) 1 Rules are classified into several categories 1. Setup of the environment 2. Robot players 3. Game process
FixedWingLib CGF. Realistic CGF Aircraft Entities ware-in-the-loop Simulations
 FixedWingLib CGF FixedWingLib CGF offers high-fidelity maneuvers for air combat, close air support and other real-world military and civil manned and unmanned fixed wing operations. Developers can use
FixedWingLib CGF FixedWingLib CGF offers high-fidelity maneuvers for air combat, close air support and other real-world military and civil manned and unmanned fixed wing operations. Developers can use
Assistive guidance system for the visually impaired Rohit Takhar 1, Tushar Sharma 1, Udit Arora 1, Sohit Verma 1 1
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 Assistive guidance system for the visually impaired Rohit Takhar 1, Tushar
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 Assistive guidance system for the visually impaired Rohit Takhar 1, Tushar
The Scrum Guide. The Definitive Guide to Scrum: The Rules of the Game. July Developed and sustained by Ken Schwaber and Jeff Sutherland
 The Scrum Guide The Definitive Guide to Scrum: The Rules of the Game July 2013 Developed and sustained by Ken Schwaber and Jeff Sutherland Table of Contents Purpose of the Scrum Guide... 3 Definition of
The Scrum Guide The Definitive Guide to Scrum: The Rules of the Game July 2013 Developed and sustained by Ken Schwaber and Jeff Sutherland Table of Contents Purpose of the Scrum Guide... 3 Definition of
VR Fully Immersive Baseball Game
 CASE STUDY VR Fully Immersive Baseball Game AVRspot The Story Behind VR Fully Immersive Baseball Game is a virtual reality game for HTC Vive and Vive Tracker platforms that recreates the immersive experience
CASE STUDY VR Fully Immersive Baseball Game AVRspot The Story Behind VR Fully Immersive Baseball Game is a virtual reality game for HTC Vive and Vive Tracker platforms that recreates the immersive experience
The Future of Hydraulic Control in Water-Systems
 The Future of Hydraulic Control in Water-Systems A. Heimann Manager of R&D and of Technical Support & Applications Engineering departments at Dorot Automatic Control Valves Dorot Control Valves, Kibbutz
The Future of Hydraulic Control in Water-Systems A. Heimann Manager of R&D and of Technical Support & Applications Engineering departments at Dorot Automatic Control Valves Dorot Control Valves, Kibbutz
Ingersoll Rand. X-Series System Automation
 Ingersoll Rand -Series System Automation Energy Savings on Demand! Ingersoll Rand As much as 20% to 60% of the energy used to operate compressed air systems is wasted. This is primarily due to operating
Ingersoll Rand -Series System Automation Energy Savings on Demand! Ingersoll Rand As much as 20% to 60% of the energy used to operate compressed air systems is wasted. This is primarily due to operating
Exemplary Conditional Automation (Level 3) Use Case Description Submitted by the Experts of OICA as input to the IWG ITS/AD
 Use Case Description Submitted by the Experts of OICA as input to the IWG ITS/AD") Submitted by OICA Document No. ITS/AD-06-05 (6th ITS/AD, 3 November 2015, agenda item 3-2) Exemplary Conditional Automation (Level 3) Use Case Description Submitted by the Experts of OICA as input to the
Submitted by OICA Document No. ITS/AD-06-05 (6th ITS/AD, 3 November 2015, agenda item 3-2) Exemplary Conditional Automation (Level 3) Use Case Description Submitted by the Experts of OICA as input to the
AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION
 AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION OMAR AHMAD oahmad@nads-sc.uiowa.edu YIANNIS E. PAPELIS yiannis@nads-sc.uiowa.edu National Advanced Driving
AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION OMAR AHMAD oahmad@nads-sc.uiowa.edu YIANNIS E. PAPELIS yiannis@nads-sc.uiowa.edu National Advanced Driving