Tweeting Bottles and other stories
|
|
|
- Easter Grant
- 5 years ago
- Views:
Transcription
1 Interaction Design Case Study - 2 Tweeting Bottles and other stories Speckled Computing
2 Outcomes of Case Study - 1 Literal and Stylised Representations Focal and Peripheral attention Detailed and Abstracted representations Intended audience: technical / non-technical Speckled Computing
3 Outcomes of Case Study - 2 Primary site of interaction: Virtual or Physical world Nature of Interaction: explicit or oblivious to the user Personal v/s Social v/s Public Speckled Computing



4 I/O devices Speckled Computing
5 Integration of Computation, Communication and Control to provide time-bounded decisions and actions Sense Learn -- Act Computation Personal Intelligence Social Public Speckled Computing Communication
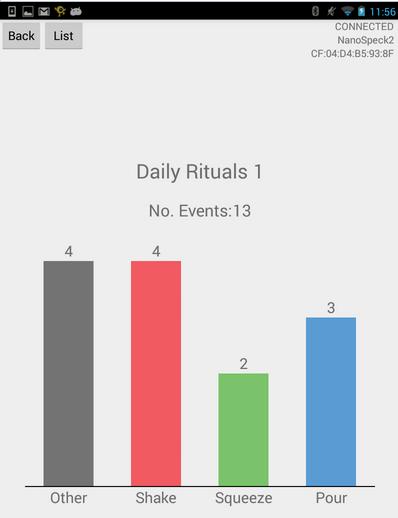
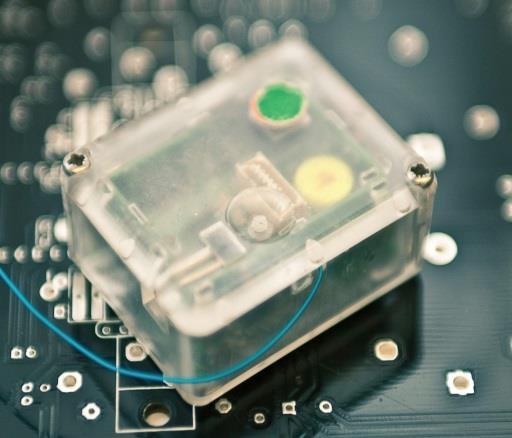
6 Tweeting Bottles Category : Consumer Requirements: Recognise predefined actions such as pouring, squeezing and shaking when using consumer products Users: Consumer behaviour analysts; Enhance user experience Sensors: 3-D Accelerometer Actuators: None Data Analysis: Clustering techniques to identify pouring, shaking and squeezing. Wireless protocol: 2.4GHz Bluetooth 4.0 radio
7 Speckled Computing Sensing Daily Rituals

8 How do consumers use FMCG products? Current methods Interviews Diaries Questionnaires Advantages Low-tech Disadvantages Error-prone, Inaccurate, Intrusive, Overhead, Unreliable (noisy data) Time-consuming - what s in it for the consumer? Speckled Computing

9 Speckled Computing
10 Tweeting bottles Sensors recognise usage of FMCG products No change in consumer behaviour Customer oblivious to data collection Data transmitted automatically to server Data Analytics extracts actionable information Times and Frequency of usage Usage patterns (diurnal, monthly, annual) Make informed Business and Design decisions Speckled Computing

11 Speckled Computing

12 Events o Pouring o Squeezing o Shaking Phone App o Recognises events o Timestamp o Transmits to server Speckled Computing
 JC = jerk count Length = number of")
13 MA = min. avg. (avg. of 10 min. z-axis acclerometer values) JC = jerk count Length = number of z-axis accelerometer values in the window
14 Clustering three actions - 1
15 Clustering three actions - 2
16 Clustering three actions - 3
17 Clustering three actions - 4
18 Integration of Computation, Communication and Control to provide time-bounded decisions and actions Sense Learn -- Act Computation Personal Intelligence Social Public Communication

19 Endow persons/objects with sensing, processing and wireless networking capabilities Link physical world of sensory data with the virtual world of digital information Physical world is the primary site of interaction
20 Golf Swing Arvind, D.K., Bates, C.A., 2008 ``The Speckled Golfer'', In 3rd Int. Conf. on Body Area Networks, March 13-17, 2008, Tempe AZ, USA, IEEE Press.
21 Analysis of golf swing.. on the golf course, and not in the studio Accurate, infrastructure-less, portable, strap-on Real-time feedback either sonic or visual (on a PDA) Fully wireless, and full body (if required) Score the goodness of a swing based on existing body of research on the biomechanics of golf swing Estimate the distance of a swing from the personal best


22 Golf Swing Statistics from any place.
23 Analysis of Motor Control Skills Swing of the club Impact of the clubhead with the ball Flight of the ball towards the target
24 Swing of the Club Modelled as a double pendulum Arms of the golfer act as one pendulum connected to the club Club acts as another pendulum Equation of motion for a double pendulum using Newton s Laws
25 Model of the Swing Arms of the golfer swing about an axis that moves during the downswing Club swings about a moving axis near the wrists of the golfer Two rigid rods Arm (A) and the Club (C) Rod A: point halfway b/w shoulder to wrist
26 Biomechanics of the Swing Physics of Golf by T.P. Jorgensen, Springer, p9 a: hor. accl. at O Gamma: angle of rod A with the downward dir. at the start of the downswing Beta: wrist-cock angle Theta: downward angle of rod A Alpha: downward swing angle Alpha dot: angular vel. of rod A Alpha double dot: angular accl. of rod A
27 Swinging in the Plane Rule v start v V' n vstart vector pointing down the shaft at the start of swing vend shaft vector at the end of the swing n = vstart x vend and is normal to the swing plane v general shaft vector during the swing which does not lie in the plane v correct shaft vector which does lie in the plane defined by n α - angle between v and n, where v end cos(α) = v.n / v n
28 Swinging in the Plane Rule cos(α) = v.n / v n, α - angle between v and n v start v V' n v end v is obtained by taking the local down-shaft vector in the club sensor s co-ordinate system and rotating it by the current orientation of the device, to give a vector that points down the shaft in the world coordinate system vworld = q* x vlocal x q q quaternion specifying orientation of the device; q* is the conjugate; vworld, vector pointing down the shaft in the world co-ordinate system, and vlocal, in the local co-ordinate frame; x is the quaternion product The rule returns 1 cos(α) as a score, which is 1 for a swing perfectly within the plane, and 0 when perpendicular to the swing plane
29 Head Movement Rule v start v V' n Change in the orientation of the head about each axis between consecutive snapshots of the golf swing Orient speck attached to the cap the root for the body model, and any head movement is recorded relative to the motion of the body For each snapshot calculate the world direction vector that points along each axis of the headmounted device, and compare it to the previous value v end Score = (Abs(cos( x)) + Abs(cos( y)) + Abs(cos( z))) /3, x, y, z are changes in alignment along the x, y and z axis
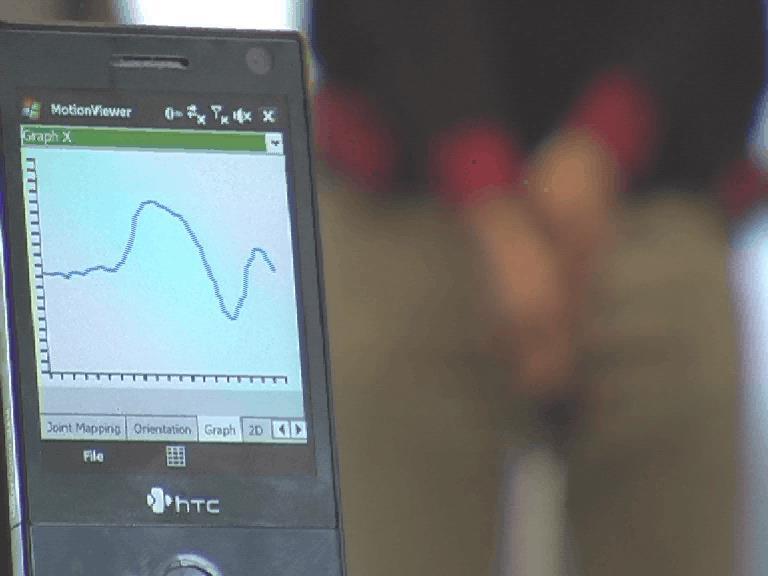
30 Body model on the Mobile Binary serial data containing orientation quaternions A list of frames. Each frame is a snapshot of the orientation of the devices Orient2 Basestation Orient2Comms Body Model Graphical display Each rule can update its own graph Swing in plane rule Motion scorer passes joint orientations to each rule and a score is returned Motion Scorer Head movement rule Each time the body model receives a new frame, it will call each frame update task. End users should write their own frame update task to interface with the body model Audio output Motion scorer outputs the overall score based on the weighted average of each rule Rule weightings FrameUpdateTasks

31 Start of a good swing Start of a poor swing The overall score is the weighted average of the scores for each rule (below). The weightings are shown in the pie chart on the right. Low score in the second swing due to the club leaving the ideal plane and excessive movement of the head. In this example, only the swing in plane and head movement rules are used to calculate the overall score. Club leaves the swing plane. The head is moved quickly during the swing. Each rule can display an auxiliary graph for extra information. In this case, the angle of movement of the head about each Centre axis is shown. for Speckled Computing The angle of each joint in the body model is updated in real time.

32 Top Row: Distance of swing from ideal plane Middle Row: Sine of the angle at the wrist, elbow and shoulder Bottom Row: Angle away from the plane and the 3 joint angles Distributed Posture Tracking
33

34
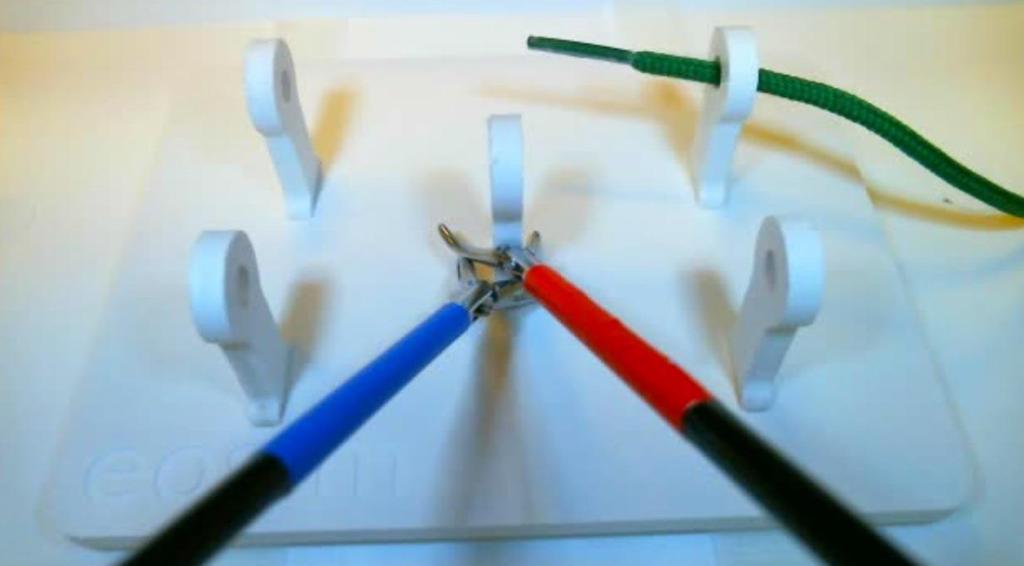
35 A comparative study of surgical skills assessment in a physical laparoscopy simulator using wireless inertial sensors R L Evans 1, R W Partridge 2 and D K Arvind 1 1 School of Informatics, University of Edinburgh 2 Royal Hospital for Sick Children, NHS Lothian Edinburgh, Scotland In Proc. Wireless Health 2014, Bethesda MA,USA, Nov. 2014, ACM Press
36
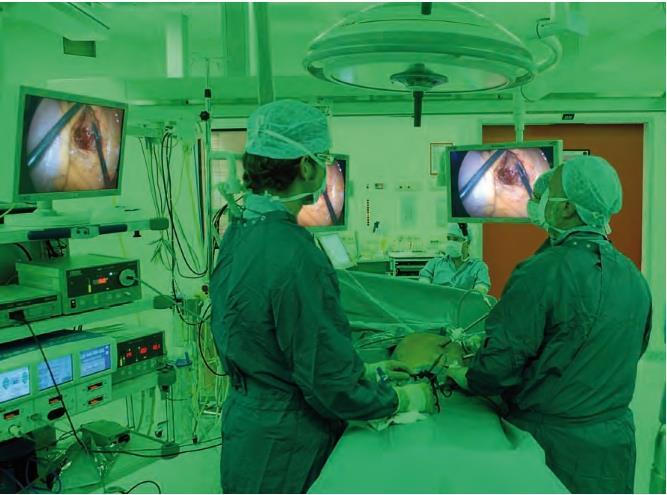
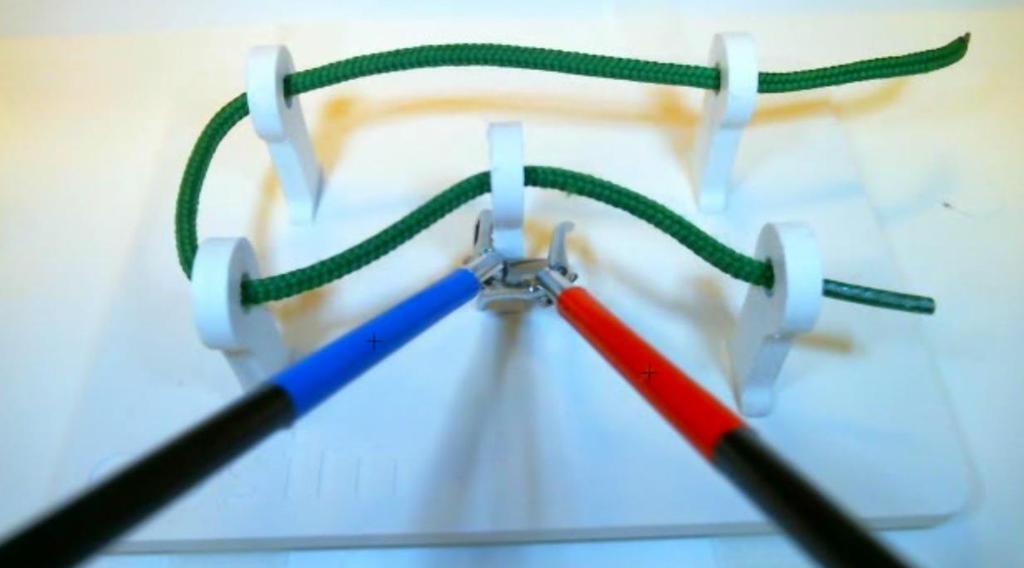
37 Overview Laparoscopy Surgery Training Medical expertise combined with manual dexterity in both hands and spatial awareness Training on real patients under supervision is expensive and time-consuming Surgical Simulators are a safe environment to practise key skills and provide automated measure of performance and feedback on improvements An improved Use-case model Take-home surgical simulator (eosim.com) Surgeons practise basic skills in their own time Inertial sensors (Orient specks) attached to the instruments provide feedback on performance of standard set of key skills Keep track of individual progress and comparison with cohort of trainees
38 Overview Laparoscopy Surgery Training Medical expertise combined with manual dexterity in both hands and spatial awareness Training on real patients under supervision is expensive and time-consuming Surgical Simulators are a safe environment to practise key skills and provide automated measure of performance and feedback on improvements An improved Use-case model Take-home surgical simulator (eosim.com) Surgeons practise basic skills in their own time Inertial sensors (Orient specks) attached to the instruments provide feedback on performance of standard set of key skills Keep track of individual progress and comparison with cohort of trainees


39
40
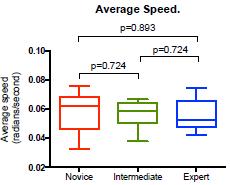
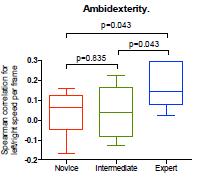
41 Combined outputs from a leave-one-out cross-validation of the linear regression model. Average Acceleration (α), Total Duration (T), Motion Smoothness (S), Angular Distance (θ), Ambidexterity (A).
The Speckled Golfer. Computing
 Computing The Speckled Golfer DK Arvind and CA Bates Research Consortium in School of Informatics, University of Edinburgh (dka@inf.ed.ac.uk) BodyNets 08, Tempe AZ, 15Mar2008 Specks, Specknets, Speckled
Computing The Speckled Golfer DK Arvind and CA Bates Research Consortium in School of Informatics, University of Edinburgh (dka@inf.ed.ac.uk) BodyNets 08, Tempe AZ, 15Mar2008 Specks, Specknets, Speckled
A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY
 Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Putting Report Details: Key and Diagrams: This section provides a visual diagram of the. information is saved in the client s database
 Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
AutoGait: A Mobile Platform that Accurately Estimates the Distance Walked
 AutoGait: A Mobile Platform that Accurately Estimates the Distance Walked -Written By- Dae-Ki Cho, Min Mun, Uichin Lee, William J. Kaiser, Mario Gerla -Presented By- Scott Mitchell CS Department Problem
AutoGait: A Mobile Platform that Accurately Estimates the Distance Walked -Written By- Dae-Ki Cho, Min Mun, Uichin Lee, William J. Kaiser, Mario Gerla -Presented By- Scott Mitchell CS Department Problem
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS)
") Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
SpeedMax White Paper. Dynastream Innovations Inc. 228 River Avenue Cochrane, AB T4C 2C1. p f
 SpeedMax White Paper 228 River Avenue Cochrane, AB T4C 2C1 www.dynastream.com p 403.932.9292 f 403.932.6521 1 OVERVIEW Established in 1998, has world-leading expertise in the research and development of
SpeedMax White Paper 228 River Avenue Cochrane, AB T4C 2C1 www.dynastream.com p 403.932.9292 f 403.932.6521 1 OVERVIEW Established in 1998, has world-leading expertise in the research and development of
Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors of success in ball striking.
 Full Swing Analysis What are we trying to accomplish? Core Competencies in the Full Swing Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors
Full Swing Analysis What are we trying to accomplish? Core Competencies in the Full Swing Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Wiimote Visualization Through Particles
 1 Abstract Wiimote Visualization Through Particles Joshua Jacobson Since 2006, the Wii video game console has been found within homes throughout out the world. The Wiimote exists as the primary input method
1 Abstract Wiimote Visualization Through Particles Joshua Jacobson Since 2006, the Wii video game console has been found within homes throughout out the world. The Wiimote exists as the primary input method
Numerical study on the wrist action during the golf downswing
 Numerical study on the wrist action during the golf downswing C.C. Chen, Y. Inoue and K. Shibara Department of Intelligent Mechanical Systems Engineering, Kochi University of Technology, Kochi-prefecture,
Numerical study on the wrist action during the golf downswing C.C. Chen, Y. Inoue and K. Shibara Department of Intelligent Mechanical Systems Engineering, Kochi University of Technology, Kochi-prefecture,
Variable Face Milling to Normalize Putter Ball Speed and Maximize Forgiveness
 Proceedings Variable Face Milling to Normalize Putter Ball Speed and Maximize Forgiveness Jacob Lambeth *, Dustin Brekke and Jeff Brunski Cleveland Golf, 5601 Skylab Rd. Huntington Beach, CA 92647, USA;
Proceedings Variable Face Milling to Normalize Putter Ball Speed and Maximize Forgiveness Jacob Lambeth *, Dustin Brekke and Jeff Brunski Cleveland Golf, 5601 Skylab Rd. Huntington Beach, CA 92647, USA;
Gait Analysis of Wittenberg s Women s Basketball Team: The Relationship between Shoulder Movement and Injuries
 Gait Analysis of Wittenberg s Women s Basketball Team: The Relationship between Shoulder Movement and Injuries Katie Bondy Senior Presentation May 1 st 2013 Research Question Among basketball players,
Gait Analysis of Wittenberg s Women s Basketball Team: The Relationship between Shoulder Movement and Injuries Katie Bondy Senior Presentation May 1 st 2013 Research Question Among basketball players,
Analysis of stroke technique using acceleration sensor IC in freestyle swimming
 Analysis of stroke technique using acceleration sensor IC in freestyle swimming Y. Ohgi, M. Yasumura Faculty of Environmental Information, Keio Univ., Japan H. Ichikawa Doctoral Prog. of Health and Sport
Analysis of stroke technique using acceleration sensor IC in freestyle swimming Y. Ohgi, M. Yasumura Faculty of Environmental Information, Keio Univ., Japan H. Ichikawa Doctoral Prog. of Health and Sport
Dynamic analysis and motion measurement of ski turns using inertial and force sensors
 Available online at www.sciencedirect.com Procedia Engineering 6 ( 213 ) 355 36 6th Asia-Pacific Conference on Sports Technology Dynamic analysis and motion measurement of ski turns using inertial and
Available online at www.sciencedirect.com Procedia Engineering 6 ( 213 ) 355 36 6th Asia-Pacific Conference on Sports Technology Dynamic analysis and motion measurement of ski turns using inertial and
A three-dimensional examination of the planar nature of the golf swing
 Journal of Sports Sciences, March 2005; 23(3): 227 234 A three-dimensional examination of the planar nature of the golf swing SIMON G. S. COLEMAN & ANDREW J. RANKIN PESLS Department, University of Edinburgh,
Journal of Sports Sciences, March 2005; 23(3): 227 234 A three-dimensional examination of the planar nature of the golf swing SIMON G. S. COLEMAN & ANDREW J. RANKIN PESLS Department, University of Edinburgh,
Science&Motion. SAM BalanceLab. Sports. control the invisible. Most advanced pressure plate for coaching
 SAM BalanceLab Science&Motion Sports control the invisible Most advanced pressure plate for coaching Balance - the invisible key to success Stop the guesswork and start to rely on facts Science and Motion
SAM BalanceLab Science&Motion Sports control the invisible Most advanced pressure plate for coaching Balance - the invisible key to success Stop the guesswork and start to rely on facts Science and Motion
Effect of the Grip Angle on Off-Spin Bowling Performance Parameters, Analysed with a Smart Cricket Ball
 Proceedings Effect of the Grip Angle on Off-Spin Bowling Performance Parameters, Analysed with a Smart Cricket Ball Franz Konstantin Fuss 1, *, Batdelger Doljin 1 and René E. D. Ferdinands 2 1 Smart Equipment
Proceedings Effect of the Grip Angle on Off-Spin Bowling Performance Parameters, Analysed with a Smart Cricket Ball Franz Konstantin Fuss 1, *, Batdelger Doljin 1 and René E. D. Ferdinands 2 1 Smart Equipment
GOLF SWING CONSISTENCY IN ELITE COLLEGIATE GOLFERS
 GOLF SWING CONSISTENCY IN ELITE COLLEGIATE GOLFERS Preliminary Findings Prepared by: Daniel Goldstein, PT, OCS, SCS, ATC John Stemm, PT, CSCS Study Location: NCAA Men s Golf Championship 2003 Karsten Creek
GOLF SWING CONSISTENCY IN ELITE COLLEGIATE GOLFERS Preliminary Findings Prepared by: Daniel Goldstein, PT, OCS, SCS, ATC John Stemm, PT, CSCS Study Location: NCAA Men s Golf Championship 2003 Karsten Creek
Laboratory 2(a): Interfacing WiiMote. Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments)
: Interfacing WiiMote. Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments)") Laboratory 2(a): Interfacing WiiMote Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments) Instructors: Edward A. Lee Sanjit A. Seshia University of California, Berkeley EECS
Laboratory 2(a): Interfacing WiiMote Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments) Instructors: Edward A. Lee Sanjit A. Seshia University of California, Berkeley EECS
EEC 686/785 Modeling & Performance Evaluation of Computer Systems. Lecture 6. Wenbing Zhao. Department of Electrical and Computer Engineering
 EEC 686/785 Modeling & Performance Evaluation of Computer Systems Lecture 6 Department of Electrical and Computer Engineering Cleveland State University wenbing@ieee.org Outline 2 Review of lecture 5 The
EEC 686/785 Modeling & Performance Evaluation of Computer Systems Lecture 6 Department of Electrical and Computer Engineering Cleveland State University wenbing@ieee.org Outline 2 Review of lecture 5 The
Decentralized Autonomous Control of a Myriapod Locomotion Robot
 Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Outline. Terminology. EEC 686/785 Modeling & Performance Evaluation of Computer Systems. Lecture 6. Steps in Capacity Planning and Management
 EEC 686/785 Modeling & Performance Evaluation of Computer Systems Lecture 6 Department of Electrical and Computer Engineering Cleveland State University wenbing@ieee.org Outline Review of lecture 5 The
EEC 686/785 Modeling & Performance Evaluation of Computer Systems Lecture 6 Department of Electrical and Computer Engineering Cleveland State University wenbing@ieee.org Outline Review of lecture 5 The
High-Speed Batting Using a Multi-Jointed Manipulator
 High-Speed Batting Using a Multi-Jointed Manipulator Taku Senoo Akio Namiki Masatoshi Ishikawa Department of Information Physics and Computing, University of Tokyo 7-3- Hongo, Bunkyo-ku, Tokyo 3-8656,
High-Speed Batting Using a Multi-Jointed Manipulator Taku Senoo Akio Namiki Masatoshi Ishikawa Department of Information Physics and Computing, University of Tokyo 7-3- Hongo, Bunkyo-ku, Tokyo 3-8656,
3D Turbulence at the Offshore Wind Farm Egmond aan Zee J.W. Wagenaar P.J. Eecen
 3D Turbulence at the Offshore Wind Farm Egmond aan Zee J.W. Wagenaar P.J. Eecen OWEZ_R_121_3Dturbulence_20101008 ECN-E--10-075 OCTOBER 2010 Abstract NoordzeeWind carries out an extensive measurement and
3D Turbulence at the Offshore Wind Farm Egmond aan Zee J.W. Wagenaar P.J. Eecen OWEZ_R_121_3Dturbulence_20101008 ECN-E--10-075 OCTOBER 2010 Abstract NoordzeeWind carries out an extensive measurement and
Biomechanics Every Golf Instructor Should Know
 Biomechanics Every Golf Instructor Should Know Dr. Phil Cheetham Senior Sport Technologist and Biomechanist United States Olympic Committee Olympic Training Center Chula Vista, CA LPGA Summit 2015 Australian
Biomechanics Every Golf Instructor Should Know Dr. Phil Cheetham Senior Sport Technologist and Biomechanist United States Olympic Committee Olympic Training Center Chula Vista, CA LPGA Summit 2015 Australian
Flight Dynamics II (Stability) Prof. Nandan Kumar Sinha Department of Aerospace Engineering Indian Institute of Technology, Madras
 Prof. Nandan Kumar Sinha Department of Aerospace Engineering Indian Institute of Technology, Madras") Flight Dynamics II (Stability) Prof. Nandan Kumar Sinha Department of Aerospace Engineering Indian Institute of Technology, Madras Module No. # 13 Introduction to Aircraft Control Systems Lecture No. #
Flight Dynamics II (Stability) Prof. Nandan Kumar Sinha Department of Aerospace Engineering Indian Institute of Technology, Madras Module No. # 13 Introduction to Aircraft Control Systems Lecture No. #
The World Leader in High Performance Signal Processing Solutions MEMS Webcast
 The World Leader in High Performance Signal Processing Solutions MEMS Webcast October, 2013 High Performance Inertial Sensors Sensor Trends Mark Martin VP, MEMS / Sensors Growth Opportunities Products
The World Leader in High Performance Signal Processing Solutions MEMS Webcast October, 2013 High Performance Inertial Sensors Sensor Trends Mark Martin VP, MEMS / Sensors Growth Opportunities Products
Lesson 3. Golf. Lesson Objectives. Personal Conditioning. Prepare Students... 3 min Explain/Demonstrate/Practice
 Lesson 3 Lesson Objectives Time Page Equipment & Materials Personal Conditioning Lesson 25........................................... 5 min. Prepare Students.................................... 3 min........
Lesson 3 Lesson Objectives Time Page Equipment & Materials Personal Conditioning Lesson 25........................................... 5 min. Prepare Students.................................... 3 min........
ABSTRACT PATTERNS USING 3D-DYNAMIC MODELING. Kaustav Nandy, Master of Science, Department of Electrical And Computer Engineering
 ABSTRACT Title of Thesis: IDENTIFICATION OF HUMAN WALKING PATTERNS USING 3D-DYNAMIC MODELING Kaustav Nandy, Master of Science, 26 Thesis Directed By: Professor. Rama Chellappa Department of Electrical
ABSTRACT Title of Thesis: IDENTIFICATION OF HUMAN WALKING PATTERNS USING 3D-DYNAMIC MODELING Kaustav Nandy, Master of Science, 26 Thesis Directed By: Professor. Rama Chellappa Department of Electrical
Body Stabilization of PDW toward Humanoid Walking
 Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS
 APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS INTRODUCTION Ken'ichi Egawa, T. Tsuboi, T. Satoh, and M. Miyazaki Graduate School of Human Sciences, Waseda University Three dimensional
APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS INTRODUCTION Ken'ichi Egawa, T. Tsuboi, T. Satoh, and M. Miyazaki Graduate School of Human Sciences, Waseda University Three dimensional
CSE 190a Project Report: Golf Club Head Tracking
 CSE 190a Project Report: Golf Club Head Tracking Ravi Chugh rchugh@cs.ucsd.edu Krystle de Mesa kdemesa@cs.ucsd.edu Abstract Computer vision and graphics technologies have been used extensively in developing
CSE 190a Project Report: Golf Club Head Tracking Ravi Chugh rchugh@cs.ucsd.edu Krystle de Mesa kdemesa@cs.ucsd.edu Abstract Computer vision and graphics technologies have been used extensively in developing
Use of On-Body Sensors to Support Elite Sprint Coaching
 Use of On-Body Sensors to Support Elite Sprint Coaching Kuntze, G. 1, Pias, M.R. 2, Bezodis, I.N. 1, Kerwin, D.G. 1, Coulouris, G. 2 and Irwin, G. 1 Cardiff School of Sport, University of Wales Institute,
Use of On-Body Sensors to Support Elite Sprint Coaching Kuntze, G. 1, Pias, M.R. 2, Bezodis, I.N. 1, Kerwin, D.G. 1, Coulouris, G. 2 and Irwin, G. 1 Cardiff School of Sport, University of Wales Institute,
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS
 WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS Teruaki Ito Institute of Technology and Science University of Tokushima Tokushima, Japan e-mail: ito@me.tokushima-u.ac.jp Abstract Human walking
WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS Teruaki Ito Institute of Technology and Science University of Tokushima Tokushima, Japan e-mail: ito@me.tokushima-u.ac.jp Abstract Human walking
These materials are based on L.C. McDermott, & P.S. Schaffer, Tutorials in Introductory Physics, Prentice Hall (2001)
") Introduction In this activity, you will learn about different types of waves. As you work though the activity, think about how the word wave can be applied to these different phenomena. Waves on a String
Introduction In this activity, you will learn about different types of waves. As you work though the activity, think about how the word wave can be applied to these different phenomena. Waves on a String
The NXT Generation. A complete learning solution
 The NXT Generation A complete learning solution 2008 The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts
The NXT Generation A complete learning solution 2008 The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Pedestrian traffic flow operations on a platform: observations and comparison with simulation tool SimPed
 Pedestrian traffic flow operations on a platform: observations and comparison with simulation tool SimPed W. Daamen & S. P. Hoogendoorn Department Transport & Planning, Delft University of Technology,
Pedestrian traffic flow operations on a platform: observations and comparison with simulation tool SimPed W. Daamen & S. P. Hoogendoorn Department Transport & Planning, Delft University of Technology,
AUTOTARGETS. WIRELESS Built in WiFi automatically connects targets together in any configuration.
 AUTOTARGETS WIRELESS Built in WiFi automatically connects targets together in any configuration. HIT SYNC TECH Proprietary system recognizes hits in scoring zones and provides shot time and accuracy analytics.
AUTOTARGETS WIRELESS Built in WiFi automatically connects targets together in any configuration. HIT SYNC TECH Proprietary system recognizes hits in scoring zones and provides shot time and accuracy analytics.
The Golf Swing. The Fundamentals
 The Golf Swing The Fundamentals Fundamental #1 Grip & Set-Up The grip and set-up should be viewed as putting parts of a machine together. The right parts connected in the right way will allow the machine
The Golf Swing The Fundamentals Fundamental #1 Grip & Set-Up The grip and set-up should be viewed as putting parts of a machine together. The right parts connected in the right way will allow the machine
Generation of Robot Motion Based on Measurement of Human Movement. Susumu Sakano 1, Satoru Shoji 1
 Generation of Robot Motion Based on Measurement of Human Movement Susumu Sakano 1, Satoru Shoji 1 1College of Engineering, Nihon University 1 Nakagawara Tokusada Tamura-machi Koriyama 963-8642 Japan Tel;
Generation of Robot Motion Based on Measurement of Human Movement Susumu Sakano 1, Satoru Shoji 1 1College of Engineering, Nihon University 1 Nakagawara Tokusada Tamura-machi Koriyama 963-8642 Japan Tel;
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
Distributed Control Systems
 Unit 41: Unit code Distributed Control Systems M/615/1509 Unit level 5 Credit value 15 Introduction With increased complexity and greater emphasis on cost control and environmental issues, the efficient
Unit 41: Unit code Distributed Control Systems M/615/1509 Unit level 5 Credit value 15 Introduction With increased complexity and greater emphasis on cost control and environmental issues, the efficient
AC : MEASUREMENT OF HYDROGEN IN HELIUM FLOW
 AC 2010-2145: MEASUREMENT OF HYDROGEN IN HELIUM FLOW Randy Buchanan, University of Southern Mississippi Christopher Winstead, University of Southern Mississippi Anton Netchaev, University of Southern Mississippi
AC 2010-2145: MEASUREMENT OF HYDROGEN IN HELIUM FLOW Randy Buchanan, University of Southern Mississippi Christopher Winstead, University of Southern Mississippi Anton Netchaev, University of Southern Mississippi
WalkCompass: Finding Walking Direction Leveraging Smartphone s Inertial Sensors. Nirupam Roy
 WalkCompass: Finding Walking Direction Leveraging Smartphone s Inertial Sensors by Nirupam Roy Bachelor of Engineering Bengal Engineering and Science University, Shibpur 2007 Submitted in Partial Fulfillment
WalkCompass: Finding Walking Direction Leveraging Smartphone s Inertial Sensors by Nirupam Roy Bachelor of Engineering Bengal Engineering and Science University, Shibpur 2007 Submitted in Partial Fulfillment
Bicycling Simulator Calibration: Proposed Framework
 Article Bicycling Simulator Calibration: Proposed Framework Transportation Research Record 1 8 Ó National Academy of Sciences: Transportation Research Board 2018 Reprints and permissions: sagepub.com/journalspermissions.nav
Article Bicycling Simulator Calibration: Proposed Framework Transportation Research Record 1 8 Ó National Academy of Sciences: Transportation Research Board 2018 Reprints and permissions: sagepub.com/journalspermissions.nav
+ t1 t2 moment-time curves
 Part 6 - Angular Kinematics / Angular Impulse 1. While jumping over a hurdle, an athlete s hip angle was measured to be 2.41 radians. Within 0.15 seconds, the hurdler s hip angle changed to be 3.29 radians.
Part 6 - Angular Kinematics / Angular Impulse 1. While jumping over a hurdle, an athlete s hip angle was measured to be 2.41 radians. Within 0.15 seconds, the hurdler s hip angle changed to be 3.29 radians.
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
IDeA Competition Report. Electronic Swimming Coach (ESC) for. Athletes who are Visually Impaired
 for. Athletes who are Visually Impaired") IDeA Competition Report Electronic Swimming Coach (ESC) for Athletes who are Visually Impaired Project Carried Out Under: The Department of Systems and Computer Engineering Carleton University Supervisor
IDeA Competition Report Electronic Swimming Coach (ESC) for Athletes who are Visually Impaired Project Carried Out Under: The Department of Systems and Computer Engineering Carleton University Supervisor
A Clinical Study Performed in Body Balance for Performance Centers
 Toe Touch and Spine Posture Stability A Clinical Study Performed in Body Balance for Performance Centers Hypothesis If a golfer is not able to touch his or her toes effectively, the golfer will have challenges
Toe Touch and Spine Posture Stability A Clinical Study Performed in Body Balance for Performance Centers Hypothesis If a golfer is not able to touch his or her toes effectively, the golfer will have challenges
A Novel Approach to Predicting the Results of NBA Matches
 A Novel Approach to Predicting the Results of NBA Matches Omid Aryan Stanford University aryano@stanford.edu Ali Reza Sharafat Stanford University sharafat@stanford.edu Abstract The current paper presents
A Novel Approach to Predicting the Results of NBA Matches Omid Aryan Stanford University aryano@stanford.edu Ali Reza Sharafat Stanford University sharafat@stanford.edu Abstract The current paper presents
A THREE DIMENSIONAL KINEMATIC AND KINETIC STUDY
 Journal of Sports Science and Medicine (2005) 4, 499-519 http://www.jssm.org Research article A THREE DIMENSIONAL KINEMATIC AND KINETIC STUDY OF THE GOLF SWING Steven M. Nesbit Department of Mechanical
Journal of Sports Science and Medicine (2005) 4, 499-519 http://www.jssm.org Research article A THREE DIMENSIONAL KINEMATIC AND KINETIC STUDY OF THE GOLF SWING Steven M. Nesbit Department of Mechanical
Goodyear Safety Research Project 2008 Presentation by Competitive Measure at the FEI Eventing Safety Forum. Presented by Tim Deans and Martin Herbert
 Goodyear Safety Research Project 2008 Presentation by Competitive Measure at the FEI Eventing Safety Forum Presented by Tim Deans and Martin Herbert The presentation discusses the Goodyear Safety Research
Goodyear Safety Research Project 2008 Presentation by Competitive Measure at the FEI Eventing Safety Forum Presented by Tim Deans and Martin Herbert The presentation discusses the Goodyear Safety Research
LESSON 9 THE SWING PLANE AND THE BODY (Part 1)
") LESSON 9 THE SWING PLANE AND THE BODY (Part 1) A BLOW IN PLANE FACE ON. In our very first lesson we understood the principle of striking a fence post with a hammer; we could make a glancing blow, but the
LESSON 9 THE SWING PLANE AND THE BODY (Part 1) A BLOW IN PLANE FACE ON. In our very first lesson we understood the principle of striking a fence post with a hammer; we could make a glancing blow, but the
Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
Using MATLAB with CANoe
 Version 2.0 2017-03-09 Application Note AN-IND-1-007 Author Restrictions Abstract Vector Informatik GmbH Public Document This application note describes the usage of MATLAB /Simulink combined with CANoe.
Version 2.0 2017-03-09 Application Note AN-IND-1-007 Author Restrictions Abstract Vector Informatik GmbH Public Document This application note describes the usage of MATLAB /Simulink combined with CANoe.
Instructional Manual
 Instructional Manual TABLE OF CONTENTS MEDICUS Dual 2000 Instructional Manual The Proper Grip 1 Posture, Stance & Alignment 2 Breakpoint 1: Takeaway 3 Breakpoint 2: Toe-up Position 4 Breakpoint 3: Setting
Instructional Manual TABLE OF CONTENTS MEDICUS Dual 2000 Instructional Manual The Proper Grip 1 Posture, Stance & Alignment 2 Breakpoint 1: Takeaway 3 Breakpoint 2: Toe-up Position 4 Breakpoint 3: Setting
The Fundamentals of Putting
 The Fundamentals of Putting Episode 1 - Setup and Aiming A proper setup position is a prerequisite of a good putt. Setup includes body posture, gripping the putter, alignment of body relative to the ball
The Fundamentals of Putting Episode 1 - Setup and Aiming A proper setup position is a prerequisite of a good putt. Setup includes body posture, gripping the putter, alignment of body relative to the ball
SaeboReJoyce USER MANUAL. Revision B
 SaeboReJoyce USER MANUAL Revision B 2017-08 User Assistance Information For maintenance or assistance with the device, contact Saebo, Inc. at: 888-284-5433 For health-related concerns, contact your health
SaeboReJoyce USER MANUAL Revision B 2017-08 User Assistance Information For maintenance or assistance with the device, contact Saebo, Inc. at: 888-284-5433 For health-related concerns, contact your health
REPORT. A comparative study of the mechanical and biomechanical behaviour of natural turf and hybrid turf for the practise of sports
 REPORT A comparative study of the mechanical and biomechanical behaviour of natural turf and hybrid turf for the practise of sports Addressed to: PSF - PALAU TURF Date: May 2015 Table of Contents SHEET
REPORT A comparative study of the mechanical and biomechanical behaviour of natural turf and hybrid turf for the practise of sports Addressed to: PSF - PALAU TURF Date: May 2015 Table of Contents SHEET
SHUFFLE TURN OF HUMANOID ROBOT SIMULATION BASED ON EMG MEASUREMENT
 SHUFFLE TURN OF HUMANOID ROBOT SIMULATION BASED ON EMG MEASUREMENT MASANAO KOEDA, TAKAYUKI SERIZAWA, AND YUTA MATSUI Osaka Electro-Communication University, Faculty of Information Science and Arts, Department
SHUFFLE TURN OF HUMANOID ROBOT SIMULATION BASED ON EMG MEASUREMENT MASANAO KOEDA, TAKAYUKI SERIZAWA, AND YUTA MATSUI Osaka Electro-Communication University, Faculty of Information Science and Arts, Department
Recognition of Tennis Strokes using Key Postures
 ISSC 2010, UCC, Cork, June 23 24 Recognition of Tennis Strokes using Key Postures Damien Connaghan, Ciarán Ó Conaire, Philip Kelly, Noel E. O Connor CLARITY: Centre for Sensor Web Technologies Dublin City
ISSC 2010, UCC, Cork, June 23 24 Recognition of Tennis Strokes using Key Postures Damien Connaghan, Ciarán Ó Conaire, Philip Kelly, Noel E. O Connor CLARITY: Centre for Sensor Web Technologies Dublin City
SwingTIP ios Application Guide
 SwingTIP Application Guide Page 3 Login / account creation 3 Main menu 4 Main Screen (after Login / Account creation) 4 Swing capture screen 5 Auto-capture video screen 5 Review screen 6 The origins of
SwingTIP Application Guide Page 3 Login / account creation 3 Main menu 4 Main Screen (after Login / Account creation) 4 Swing capture screen 5 Auto-capture video screen 5 Review screen 6 The origins of
Accident Reconstruction
 Accident Reconstruction Accident Reconstruction: Overview www.fleetistics.com 855.300.0526 + How to find the necessary data to digitally reconstruct an accident + What the data means and how to interpret
Accident Reconstruction Accident Reconstruction: Overview www.fleetistics.com 855.300.0526 + How to find the necessary data to digitally reconstruct an accident + What the data means and how to interpret
Gait Analysis System. User Manual and Outcome parameters Patent WO2012/ A1
 Gait Analysis System User Manual and Outcome parameters Patent WO212/7855 A1 Thank you for purchasing our Gait Analysis Package. Gait Up s goal is to provide you with a user-friendly setup to measure accurately
Gait Analysis System User Manual and Outcome parameters Patent WO212/7855 A1 Thank you for purchasing our Gait Analysis Package. Gait Up s goal is to provide you with a user-friendly setup to measure accurately
UNIQUE ADVANTAGES OF PIPENET
 UNIQUE ADVANTAGES OF PIPENET TRANSIENT MODULE Sunrise Systems Limited Section 1: Unique Advantages of the leading hydraulic analysis software engineers prefer to use: PIPENET s schematic design is unique.
UNIQUE ADVANTAGES OF PIPENET TRANSIENT MODULE Sunrise Systems Limited Section 1: Unique Advantages of the leading hydraulic analysis software engineers prefer to use: PIPENET s schematic design is unique.
How is SkyTrak different from other launch monitors?
 SkyTrak : The Drilldown If you re looking for a concise and brief overview of SkyTrak, what it is, how it works and what all the data elements indicate, then please watch our educational video series,
SkyTrak : The Drilldown If you re looking for a concise and brief overview of SkyTrak, what it is, how it works and what all the data elements indicate, then please watch our educational video series,
Walking Gait Generation with Foot Placement Control for the HOAP-3 Humanoid Robot
 Walking Gait Generation with Foot Placement Control for the HOAP-3 Humanoid Robot Yazhou Huang, Robert Backman and Marcelo Kallmann UCM School of Engineering Technical Report TR-2011-002 University of
Walking Gait Generation with Foot Placement Control for the HOAP-3 Humanoid Robot Yazhou Huang, Robert Backman and Marcelo Kallmann UCM School of Engineering Technical Report TR-2011-002 University of
SIMPACK Biomotion Application of Virtual Human Body Models in MBS Simulation: The Biomotion Car Driver Model and other Applications
 SIMPACK Biomotion Application of Virtual Human Body Models in MBS Simulation: The Biomotion Car Driver Model and other Applications 1 Biomotion Solutions Launched 2010 as University Spin-off Theoretical
SIMPACK Biomotion Application of Virtual Human Body Models in MBS Simulation: The Biomotion Car Driver Model and other Applications 1 Biomotion Solutions Launched 2010 as University Spin-off Theoretical
ELITE Junior Development Turning Today s Youth into Real Players and Real Athletes. Program Outline
 ELITE Junior Development Turning Today s Youth into Real Players and Real Athletes Program Outline Passion with Purpose The elite junior development program is a premium program for serious junior golfers
ELITE Junior Development Turning Today s Youth into Real Players and Real Athletes Program Outline Passion with Purpose The elite junior development program is a premium program for serious junior golfers
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
LAWS, Principles, and Preferences.
 LAWS of the Game of GOLF By James E. Coach Robertson From his book The Encyclopedia of Successful GOLF Coaching LAWS, Principles, and Preferences. The Model Golf Swing You can end your search for the one
LAWS of the Game of GOLF By James E. Coach Robertson From his book The Encyclopedia of Successful GOLF Coaching LAWS, Principles, and Preferences. The Model Golf Swing You can end your search for the one
RATE CONTROL SYSTEM FOR SOUNDING ROCKETS
 RATE CONTROL SYSTEM FOR SOUNDING ROCKETS Josef Ettl, Johann Pfänder German Aerospace Center (DLR), D-834 Wessling, Germany e-mail: josef.ettl@dlr.de johann.pfaender@dlr.de, 1. ABSTRACT DLR/Moraba has a
RATE CONTROL SYSTEM FOR SOUNDING ROCKETS Josef Ettl, Johann Pfänder German Aerospace Center (DLR), D-834 Wessling, Germany e-mail: josef.ettl@dlr.de johann.pfaender@dlr.de, 1. ABSTRACT DLR/Moraba has a
WIND DIRECTION ERROR IN THE LILLGRUND OFFSHORE WIND FARM
 WIND DIRECTION ERROR IN THE LILLGRUND OFFSHORE WIND FARM * Xi Yu*, David Infield*, Eoghan Maguireᵜ Wind Energy Systems Centre for Doctoral Training, University of Strathclyde, R3.36, Royal College Building,
WIND DIRECTION ERROR IN THE LILLGRUND OFFSHORE WIND FARM * Xi Yu*, David Infield*, Eoghan Maguireᵜ Wind Energy Systems Centre for Doctoral Training, University of Strathclyde, R3.36, Royal College Building,
Mobility Lab provides sensitive, valid and reliable outcome measures.
 Mobility Lab provides sensitive, valid and reliable outcome measures. ith hundreds of universities and hospitals using this system worldwide, Mobility Lab is the most trusted wearable gait and balance
Mobility Lab provides sensitive, valid and reliable outcome measures. ith hundreds of universities and hospitals using this system worldwide, Mobility Lab is the most trusted wearable gait and balance
Design of Monitoring System Step Walking With MPU6050 Sensor Based Android
 Journal Of Informatics, Network, and Computer Science Vol : 1, No : 1, November 2016, Halaman : 1 8 ISSN : 2541-5123 DOI Link : https://doi.org/10.21070/joincs.v1i1.799 Design of Monitoring System Step
Journal Of Informatics, Network, and Computer Science Vol : 1, No : 1, November 2016, Halaman : 1 8 ISSN : 2541-5123 DOI Link : https://doi.org/10.21070/joincs.v1i1.799 Design of Monitoring System Step
Modeling of Hydraulic Hose Paths
 Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 9-2002 Modeling of Hydraulic Hose Paths Kurt A. Chipperfield Iowa State University Judy M. Vance Iowa State
Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 9-2002 Modeling of Hydraulic Hose Paths Kurt A. Chipperfield Iowa State University Judy M. Vance Iowa State
Same as for the forehand straight drive except the shoulders and hips rotate into a more open position; sideways to the target on the front wall
 The Forehand and Backhand Drive Forehand Straight Drive The forehand straight drive is used to hit the ball to good length and tight to the sidewall. The straight drive is used to rally with the opponent
The Forehand and Backhand Drive Forehand Straight Drive The forehand straight drive is used to hit the ball to good length and tight to the sidewall. The straight drive is used to rally with the opponent
Mobility Detection Using Everyday GSM Traces
 Mobility Detection Using Everyday GSM Traces Timothy Sohn et al Philip Cootey pcootey@wpi.edu (03/22/2011) Mobility Detection High level activity discerned from course Grained GSM Data provides immediate
Mobility Detection Using Everyday GSM Traces Timothy Sohn et al Philip Cootey pcootey@wpi.edu (03/22/2011) Mobility Detection High level activity discerned from course Grained GSM Data provides immediate
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53. The design of exoskeleton lower limbs rehabilitation robot
 Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Dr. D. Ryan York, PT, DPT, CGS. Dr. Chad Edwards, PT, DPT, CGFI
 Dr. D. Ryan York, PT, DPT, CGS Doctorate in Physical Therapy Certified Golf Performance Specialist, GOLO Golf University Dr. Chad Edwards, PT, DPT, CGFI Doctorate in Physical Therapy Certified Golf Fitness
Dr. D. Ryan York, PT, DPT, CGS Doctorate in Physical Therapy Certified Golf Performance Specialist, GOLO Golf University Dr. Chad Edwards, PT, DPT, CGFI Doctorate in Physical Therapy Certified Golf Fitness
 Peter Ljungstrand www.experimedia.eu www.tii.se 1 Type of Project: Integrated Project Project Coordinator: IT Innovation Project Duration: Oct-11 to Sept-14 (36 months) Total budget: 6,772,089 Euros Maximum
Peter Ljungstrand www.experimedia.eu www.tii.se 1 Type of Project: Integrated Project Project Coordinator: IT Innovation Project Duration: Oct-11 to Sept-14 (36 months) Total budget: 6,772,089 Euros Maximum
Project 1 Those amazing Red Sox!
 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.001 Structure and Interpretation of Computer Programs Spring Semester, 2005 Project 1 Those amazing Red
MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.001 Structure and Interpretation of Computer Programs Spring Semester, 2005 Project 1 Those amazing Red
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system
 An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
Equine Cannon Angle System
 Equine Cannon System How to interpret the results December 2010 Page 1 of 14 Table of Contents Introduction... 3 The Sagittal Plane... 4 The Coronal Plane... 5 Results Format... 6 How to Interpret the
Equine Cannon System How to interpret the results December 2010 Page 1 of 14 Table of Contents Introduction... 3 The Sagittal Plane... 4 The Coronal Plane... 5 Results Format... 6 How to Interpret the
Virtual Breadboarding. John Vangelov Ford Motor Company
 Virtual Breadboarding John Vangelov Ford Motor Company What is Virtual Breadboarding? Uses Vector s CANoe product, to simulate MATLAB Simulink models in a simulated or real vehicle environment. Allows
Virtual Breadboarding John Vangelov Ford Motor Company What is Virtual Breadboarding? Uses Vector s CANoe product, to simulate MATLAB Simulink models in a simulated or real vehicle environment. Allows
Development of SAR-Derived Ocean Surface Winds at NOAA/NESDIS
 Development of SAR-Derived Ocean Surface Winds at NOAA/NESDIS Pablo Clemente-Colón, William G. Pichel, NOAA/NESDIS Frank M. Monaldo, Donald R. Thompson The Johns Hopkins University Applied Physics Laboratory
Development of SAR-Derived Ocean Surface Winds at NOAA/NESDIS Pablo Clemente-Colón, William G. Pichel, NOAA/NESDIS Frank M. Monaldo, Donald R. Thompson The Johns Hopkins University Applied Physics Laboratory
Wind Tunnel Instrumentation System
 Wind Tunnel Instrumentation System Karthigeyan S 1, Jai bhavani K S 2, Jenifer Z 3 P.G Student, Dept. of, Valliammai Engineering College, Chennai, India 1 Assistant Professor, Dept. of, Valliammai Engineering
Wind Tunnel Instrumentation System Karthigeyan S 1, Jai bhavani K S 2, Jenifer Z 3 P.G Student, Dept. of, Valliammai Engineering College, Chennai, India 1 Assistant Professor, Dept. of, Valliammai Engineering
Golf. By Matthew Cooke. Game Like Training
 Game Like Training for Golf By Matthew Cooke Game Like Training @gltgolf @gltraininggolf Introduction In this quick start guide we dive a little deeper into what it means to train in a Game Like way. Game
Game Like Training for Golf By Matthew Cooke Game Like Training @gltgolf @gltraininggolf Introduction In this quick start guide we dive a little deeper into what it means to train in a Game Like way. Game
NAOMI Software Design
 UK Astronomy Technology Centre Royal Observatory Edinburgh B D Kelly 26 April 1999 NAOMI/SOFT/BDK/1999.04/002 NAOMI Software Design 1. Context Diagram Catalogues ing Archive Object Details ing naomi NAOMI
UK Astronomy Technology Centre Royal Observatory Edinburgh B D Kelly 26 April 1999 NAOMI/SOFT/BDK/1999.04/002 NAOMI Software Design 1. Context Diagram Catalogues ing Archive Object Details ing naomi NAOMI
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg. Abstract
 Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Differential Kinematics, Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
CS 4649/7649 Robot Intelligence: Planning Differential Kinematics, Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
INSTRUMENT INSTRUMENTAL ERROR (of full scale) INSTRUMENTAL RESOLUTION. Tutorial simulation. Tutorial simulation
 INSTRUMENTAL RESOLUTION. Tutorial simulation. Tutorial simulation") Lab 1 Standing Waves on a String Learning Goals: To distinguish between traveling and standing waves To recognize how the wavelength of a standing wave is measured To recognize the necessary conditions
Lab 1 Standing Waves on a String Learning Goals: To distinguish between traveling and standing waves To recognize how the wavelength of a standing wave is measured To recognize the necessary conditions
Statistics of Bicycle Rider Motion
 Procedia Engineering 002 (2010) 1 62937 2942 Procedia Engineering www.elsevier.com/locate/procedia Statistics of Bicycle Rider Motion Jason K. Moore a,, Mont Hubbard a, A. L. Schwab b, J. D. G. Kooijman
Procedia Engineering 002 (2010) 1 62937 2942 Procedia Engineering www.elsevier.com/locate/procedia Statistics of Bicycle Rider Motion Jason K. Moore a,, Mont Hubbard a, A. L. Schwab b, J. D. G. Kooijman
Using sensory feedback to improve locomotion performance of the salamander robot in different environments
 Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
THE FUNDAMENTALS OF THE AIR SAMPLER CALIBRATION-VERIFICATION PROCESS
 THE FUNDAMENTALS OF THE AIR SAMPLER CALIBRATION-VERIFICATION PROCESS Frank M. Gavila F&J SPECIALTY PRODUCTS, INC. 404 Cypress Road Ocala, Florida, USA 3447 fandj@fjspecialty.com INTRODUCTION The calibration
THE FUNDAMENTALS OF THE AIR SAMPLER CALIBRATION-VERIFICATION PROCESS Frank M. Gavila F&J SPECIALTY PRODUCTS, INC. 404 Cypress Road Ocala, Florida, USA 3447 fandj@fjspecialty.com INTRODUCTION The calibration
Structure (Down plane)
") By Lauren Russell Structure (Down plane) The body (toes, knees, hips, wrists and shoulders) is aligned parallel to the intended target line. The torso is tilted over the ball from the hips whilst maintaining
By Lauren Russell Structure (Down plane) The body (toes, knees, hips, wrists and shoulders) is aligned parallel to the intended target line. The torso is tilted over the ball from the hips whilst maintaining
TOMI PRO MODEL PERSONAL MODEL
 TOMI PRO MODEL PERSONAL MODEL System requirements Windows System Requirements To use your TOMI and its software, your system should have: A Microsoft Windows compatible PC with a Pentium IV processor (1.5
TOMI PRO MODEL PERSONAL MODEL System requirements Windows System Requirements To use your TOMI and its software, your system should have: A Microsoft Windows compatible PC with a Pentium IV processor (1.5