Incremental ARA*: An Anytime Incremental Search Algorithm For Moving Target Search. University of Southern California Singapore Management University
|
|
|
- Belinda Elliott
- 5 years ago
- Views:
Transcription



1 Incremental ARA*: An Anytime Incremental Search Algorithm For Moving Target Search Xiaoxun Sun Tansel Uras William Yeoh Sven Koenig University of Southern California Singapore Management University

2 Moving Target Search Assumptions The hunter knows the terrain. The hunter knows its own cell. The hunter knows the cell of the target.
3 Moving Target Search Offline search e.g. minimax search (Reverse Minimax A*) Online search e.g. repeated deterministic searches The hunter finds a short path to the target and moves along the path. Whenever the target moves off the path, the hunter repeats the process.
4 A* [Hart, Nilsson, Raphael, 1968] The hunter uses A* (with consistent h-values). hunter target
5 The hunter uses A*. A* [Hart, Nilsson, Raphael, 1968]
6 The hunter uses A*. A* [Hart, Nilsson, Raphael, 1968]
7 The hunter uses A*. A* [Hart, Nilsson, Raphael, 1968]
8 The hunter uses A*. A* [Hart, Nilsson, Raphael, 1968]

9 A* [Hart, Nilsson, Raphael, 1968] diagonal moves have cost one

10 A* [Hart, Nilsson, Raphael, 1968]
11 A* [Hart, Nilsson, Raphael, 1968] 1 move Small (but soft) time limit for time between two moves of the hunter 1-3 ms per search for Bioware [Bulitko et al, 2007]
12 A* [Hart, Nilsson, Raphael, 1968] The hunter uses A*. time limit for time between two moves of the hunter 1-3 ms per search for Bioware [Bulitko et al, 2007]
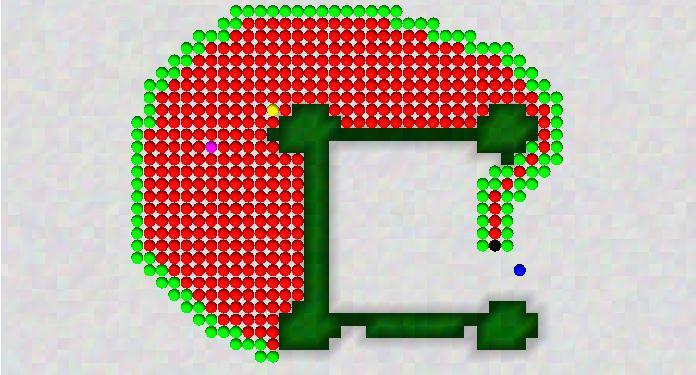
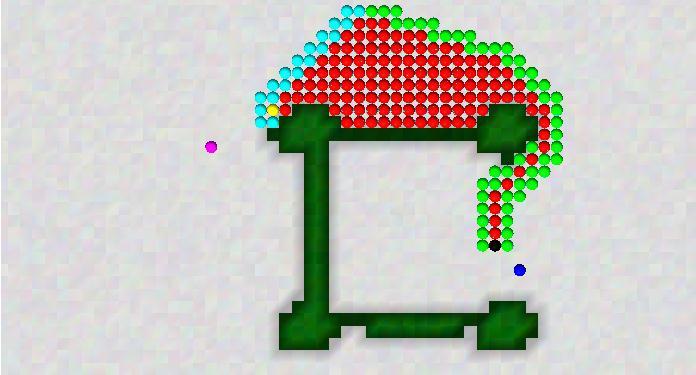
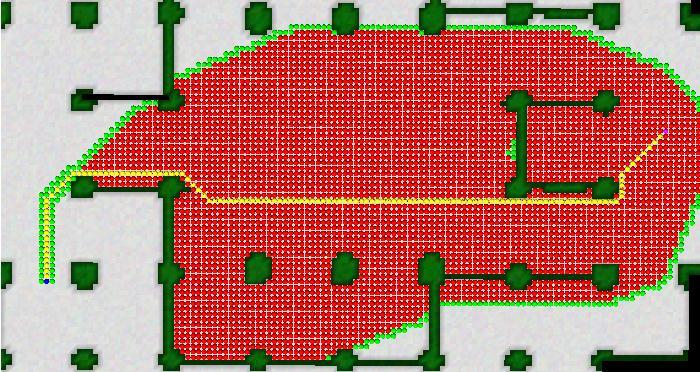
13 FRA* [Sun, Yeoh, Koenig, 2009] Idea 1: Reduce the runtime of the A* search by using incremental A* search
14 FRA* The hunter uses A*. hunter target
15 The hunter uses A*. FRA*
16 The hunter uses A*. FRA*
17 The hunter uses A*. FRA*
18 The hunter uses A*. FRA*
19 FRA*
20 FRA*
21 FRA*

22 FRA* The hunter uses incremental A*. DISCLAIMER time limit for time between two moves of the hunter
23 WA* [Pohl, 1970] Idea 2: Reduce the runtime of the A* search with weighted A* search
24 WA* The hunter uses weighted A*. The smaller the weight w, the slower the search but the shorter the path. Weighted A* with weight one is identical to A*. f(s) = g(s) + w h(s) w= expansions 11 movements w= expansions 11 movements w= expansions 10 movements Courtesy of Maxim Likhachev
25 WA* w=1.6
26 WA* w=1.4
27 WA* w=1.2
28 WA* w=1.0
29 WA* The hunter uses weighted A*. The smaller the weight w, the slower the search but the shorter the path. Weighted A* with weight one is identical to A*. w=2.0 w=2.0 time limit for time between two moves of the hunter
30 Repeated WA* The hunter uses weighted A* repeatedly, where the weight decreases over time until it is one. Set w to maxw. Decrease w by Dw. w=2.0 w=1.9 Set w to maxw. w=2.0 time limit for time between two moves of the hunter
31 Repeated WA* The hunter uses weighted A* repeatedly, where the weight decreases over time until it is one. Set w to maxw. Decrease w by Dw. w=2.0 w=1.9 Set w to maxw. w=2.0 A B time limit for time between two moves of the hunter
![ARA* [Likhachev, Gordon, Thrun, 2003] The hunter uses weighted A*. The smaller the weight w, the slower the search but the shorter the path.](/docs-images/82/86921643/images/32-2.jpg "Weighted A* with weight one is identical to A*. f(s) = g(s) + w h(s) w=2.5 13 expansions 11 movements w=1.5 15 expansions 11 movements w=1.")
32 ARA* [Likhachev, Gordon, Thrun, 2003] The hunter uses weighted A*. The smaller the weight w, the slower the search but the shorter the path. Weighted A* with weight one is identical to A*. f(s) = g(s) + w h(s) w= expansions 11 movements w= expansions 11 movements w= expansions 10 movements Courtesy of Maxim Likhachev


33 ARA* The hunter uses weighted A*. The smaller the weight w, the slower the search but the shorter the path. Weighted A* with weight one is identical to A*. f(s) = g(s) + w h(s) w= expansions 11 movements w=1.5 1 expansion 11 movements w=1.0 9 expansions 10 movements Courtesy of Maxim Likhachev
34 ARA* The hunter uses incremental weighted A* repeatedly, where the weight decreases over time until it is one. Set w to maxw. Decrease w by Dw. Decrease w by Dw. Set w to maxw. w=2.0 w=1.9 w=1.8 w=2.0 A B time limit for time between two moves of the hunter

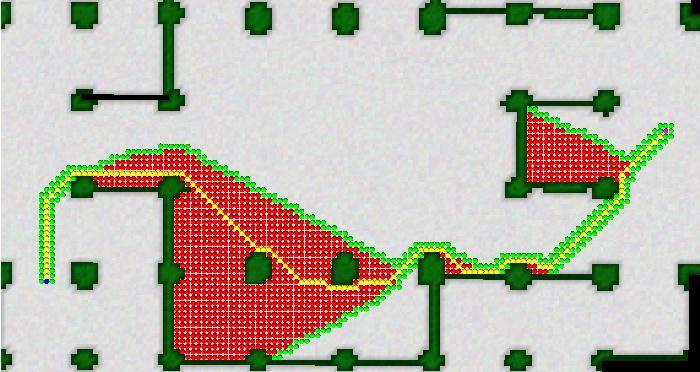
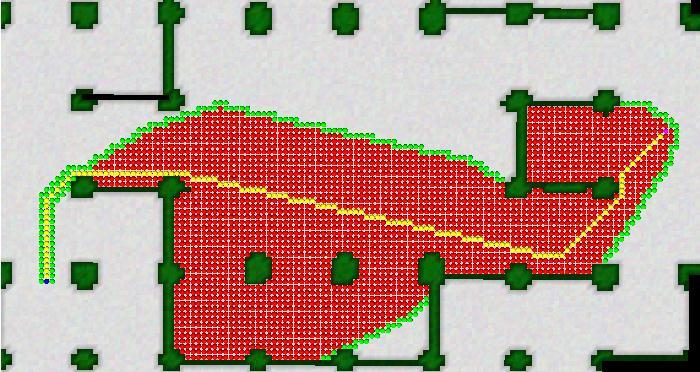
35 Incremental ARA* = FRA* + ARA* A
36 Incremental ARA* = FRA* + ARA* B
37 ARA* [Likhachev, Gordon, Thrun, 2003] The hunter uses incremental weighted A* repeatedly, where the weight decreases over time until it is one. Set w to maxw. Decrease w by Dw. Decrease w by Dw. Set w to maxw. w=2.0 w=1.9 w=1.8 w=2.0 time limit for time between two moves of the hunter


38 Incremental ARA* = FRA* + ARA* The hunter uses incremental weighted A* repeatedly, where the weight decreases over time until it is one. Set w to maxw. Decrease w by Dw. Decrease w by Dw. Set w to maxw. w=2.0 w=1.9 w=1.8 w=2.0 time limit for time between two moves of the hunter
39 Incremental ARA* = FRA* + ARA*
40 FRA*
41 Incremental ARA* = FRA* + ARA*
42 ARA*
43 Incremental ARA* = FRA* + ARA*
44 Incremental ARA* = FRA* + ARA*
45 Incremental ARA* = FRA* + ARA* The algorithm: Make the new state of the hunter locally consistent. Delete all states from the search tree that are not in the subtree rooted in the new state of the hunter. Add to the OPEN list all states that border non-leaf states in the search tree. If the f-value of the new state of the target is no larger than the smallest f-values of all states in the OPEN list (= the search tree already contains a w-suboptimal path from the state of the hunter to the state of the target), then decrease w to max(1, w- Dw). Otherwise, set w to maxw. Run an ARA* search to find an w-suboptimal path from the state of the hunter to the state of the target. Move the hunter along the path until it catches the target or the target moves off the path. In the former case, stop. In the latter case, repeat.
46 Experimental Results We use 100 test cases with randomly selected unblocked connected cells for the hunter and target, namely 100 four-neighbor random maps of size 1,000x1,000 with 25 percent randomly blocked cells; and one four-neighbor game map of size 626x626 adapted from Warcraft III The target repeatedly follows a shortest path from its current cell to a randomly selected unblocked cell, skipping every tenth move.
47 Experimental Results FRA*, Repeated ARA* and Incremental ARA* were implemented in similar ways (e.g. using a binary heap). There is a time limit for each search but we allow the search algorithms to exceed the time limit until they find some path from the hunter to the target. For Repeated ARA* and Incremental ARA*, we use maxw=2.0 and Dw=0.1.
48 Experimental Results (Random Maps) Time limit Moves per test case First searches exceeding the time limit Searches per time interval FRA* 200μs % - Repeated ARA* 200μs % 3.29 Incremental ARA* 200μs % 5.47 FRA* 500μs % - Repeated ARA* 500μs % 5.53 Incremental ARA* 500μs % 7.55 FRA* 1000μs % - Repeated ARA* 1000μs % 7.82 Incremental ARA* 1000μs % 9.07
49 Experimental Results (Game Map) Time limit Moves per test case First searches exceeding the time limit Searches per time interval FRA* 200μs % - Repeated ARA* 200μs % 3.29 Incremental ARA* 200μs % 5.47 FRA* 500μs % - Repeated ARA* 500μs % 4.69 Incremental ARA* 500μs % 7.51 FRA* 1000μs % - Repeated ARA* 1000μs % 5.97 Incremental ARA* 1000μs % 8.87
50 Conclusions Replanning is important when the search problem changes. We begin to understand replanning for goaldirected navigation in unknown terrain towards a stationary target (where the hunter gains knowledge about the terrain). This paper studies replanning for goal-directed navigation in known terrain towards a moving target (where the hunter gains knowledge about the target cell).
51 Conclusions Incremental ARA* is the first incremental anytime search algorithm for moving target search in known terrain. Incremental ARA* can be used with smaller time limits between moves of the hunter than competing state-of-the-art moving target search algorithms.
52 Acknowledgements Thanks to Nathan Sturtevant for his test problems and HOG2 environment (see movingai.com). The research at USC was supported by NSF, ARO and ONR. The research at Singapore Management University was supported by the Singapore National Research Foundation. The views and conclusions are those of the authors and should not be interpreted as representing the official policies of the sponsoring organizations.
Uninformed search methods II.
 CS 2710 Foundations of AI Lecture 4 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before
CS 2710 Foundations of AI Lecture 4 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before
Uninformed search methods II.
 CS 1571 Introduction to AI Lecture 5 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Uninformed methods Uninformed search methods use only information available in
CS 1571 Introduction to AI Lecture 5 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Uninformed methods Uninformed search methods use only information available in
Algorithms and Data Structures
 Algorithms and Data Structures CMPSC 465 LECTURES 22-23 Binary Search Trees Adam Smith S. Raskhodnikova and A. Smith. Based on slides by C. Leiserson and E. Demaine. 1 Heaps: Review Heap-leap-jeep-creep(A):
Algorithms and Data Structures CMPSC 465 LECTURES 22-23 Binary Search Trees Adam Smith S. Raskhodnikova and A. Smith. Based on slides by C. Leiserson and E. Demaine. 1 Heaps: Review Heap-leap-jeep-creep(A):
Spider Search: An Efficient and Non-Frontier-Based Real-Time Search Algorithm
 International Journal of Computer Information Systems and Industrial Management Applications (IJCISIM) ISSN: 2150-7988 Vol.2 (2010), pp.234-242 http://www.mirlabs.org/ijcisim Spider Search: An Efficient
International Journal of Computer Information Systems and Industrial Management Applications (IJCISIM) ISSN: 2150-7988 Vol.2 (2010), pp.234-242 http://www.mirlabs.org/ijcisim Spider Search: An Efficient
Transposition Table, History Heuristic, and other Search Enhancements
 Transposition Table, History Heuristic, and other Search Enhancements Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract Introduce heuristics for improving the efficiency
Transposition Table, History Heuristic, and other Search Enhancements Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract Introduce heuristics for improving the efficiency
CENG 466 Artificial Intelligence. Lecture 4 Solving Problems by Searching (II)
") CENG 466 Artificial Intelligence Lecture 4 Solving Problems by Searching (II) Topics Search Categories Breadth First Search Uniform Cost Search Depth First Search Depth Limited Search Iterative Deepening
CENG 466 Artificial Intelligence Lecture 4 Solving Problems by Searching (II) Topics Search Categories Breadth First Search Uniform Cost Search Depth First Search Depth Limited Search Iterative Deepening
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Roadmap Approaches Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1 *Slides
CS 4649/7649 Robot Intelligence: Planning Roadmap Approaches Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1 *Slides
SIDDHARTH INSTITUTE OF ENGINEERING & TECHNOLOGY :: PUTTUR (AUTONOMOUS) Siddharth Nagar, Narayanavanam Road QUESTION BANK (DESCRIPTIVE)
 Siddharth Nagar, Narayanavanam Road QUESTION BANK (DESCRIPTIVE)") Subject with Code : Data Structures(16MC806) Course & Specialization: MCA UNIT I Sorting, Searching and Directories 1. Explain how to sort the elements by using insertion sort and derive time complexity
Subject with Code : Data Structures(16MC806) Course & Specialization: MCA UNIT I Sorting, Searching and Directories 1. Explain how to sort the elements by using insertion sort and derive time complexity
SEARCH SEARCH TREE. Node: State in state tree. Root node: Top of state tree
 Page 1 Page 1 Page 2 SEARCH TREE SEARCH Node: State in state tree Root node: Top of state tree Children: Nodes that can be reached from a given node in 1 step (1 operator) Expanding: Generating the children
Page 1 Page 1 Page 2 SEARCH TREE SEARCH Node: State in state tree Root node: Top of state tree Children: Nodes that can be reached from a given node in 1 step (1 operator) Expanding: Generating the children
SEARCH TREE. Generating the children of a node
 SEARCH TREE Node: State in state tree Root node: Top of state tree Children: Nodes that can be reached from a given node in 1 step (1 operator) Expanding: Generating the children of a node Open: Closed:
SEARCH TREE Node: State in state tree Root node: Top of state tree Children: Nodes that can be reached from a given node in 1 step (1 operator) Expanding: Generating the children of a node Open: Closed:
Decision Trees. Nicholas Ruozzi University of Texas at Dallas. Based on the slides of Vibhav Gogate and David Sontag
 Decision Trees Nicholas Ruozzi University of Texas at Dallas Based on the slides of Vibhav Gogate and David Sontag Announcements Course TA: Hao Xiong Office hours: Friday 2pm-4pm in ECSS2.104A1 First homework
Decision Trees Nicholas Ruozzi University of Texas at Dallas Based on the slides of Vibhav Gogate and David Sontag Announcements Course TA: Hao Xiong Office hours: Friday 2pm-4pm in ECSS2.104A1 First homework
Uninformed search methods
 Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before the lecture Report and programming
Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before the lecture Report and programming
Representation. Representation. Representation. Representation. 8 puzzle.
 You have a 3-liter jug and a 4-liter jug, and need to measure out exactly two liters of water. the jugs do not have any measurement lines you don't have any additional containers 8 puzzle. Measuring water.
You have a 3-liter jug and a 4-liter jug, and need to measure out exactly two liters of water. the jugs do not have any measurement lines you don't have any additional containers 8 puzzle. Measuring water.
Bowls WA Seniors Recreation Council of WA Over 60 s Mixed State Pairs Conditions of Play
 Bowls WA Seniors Recreation Council of WA Over 60 s Mixed State Pairs Conditions of Play Eligibility: Players must be 60 years or older at the first date of competition. Controlling Body Bowls WA Fixtures
Bowls WA Seniors Recreation Council of WA Over 60 s Mixed State Pairs Conditions of Play Eligibility: Players must be 60 years or older at the first date of competition. Controlling Body Bowls WA Fixtures
Solving Problems by Searching chap3 1. Problem-Solving Agents
 Chapter3 Solving Problems by Searching 20070315 chap3 1 Problem-Solving Agents Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving
Chapter3 Solving Problems by Searching 20070315 chap3 1 Problem-Solving Agents Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving
BOWLS WA MEN S STATE PAIRS CONDITIONS OF PLAY To be read in conjunction with the Bowls WA General Field of Play Rules
 BOWLS WA MEN S STATE PAIRS CONDITIONS OF PLAY To be read in conjunction with the Bowls WA General Field of Play Rules Controlling Body Bowls WA Fixtures and Events Committee Competition Dates Sectional
BOWLS WA MEN S STATE PAIRS CONDITIONS OF PLAY To be read in conjunction with the Bowls WA General Field of Play Rules Controlling Body Bowls WA Fixtures and Events Committee Competition Dates Sectional
CS472 Foundations of Artificial Intelligence. Final Exam December 19, :30pm
 CS472 Foundations of Artificial Intelligence Final Exam December 19, 2003 12-2:30pm Name: (Q exam takers should write their Number instead!!!) Instructions: You have 2.5 hours to complete this exam. The
CS472 Foundations of Artificial Intelligence Final Exam December 19, 2003 12-2:30pm Name: (Q exam takers should write their Number instead!!!) Instructions: You have 2.5 hours to complete this exam. The
Introduction. AI and Searching. Simple Example. Simple Example. Now a Bit Harder. From Hammersmith to King s Cross
 Introduction AI and Searching We have seen how models of the environment allow an intelligent agent to dry run scenarios in its head without the need to act Logic allows premises to be tested Machine learning
Introduction AI and Searching We have seen how models of the environment allow an intelligent agent to dry run scenarios in its head without the need to act Logic allows premises to be tested Machine learning
Search I. Tuomas Sandholm Carnegie Mellon University Computer Science Department. [Read Russell & Norvig Chapter 3]
![Search I. Tuomas Sandholm Carnegie Mellon University Computer Science Department. [Read Russell & Norvig Chapter 3]](/thumbs/84/90666740.jpg "Search I. Tuomas Sandholm Carnegie Mellon University Computer Science Department. [Read Russell & Norvig Chapter 3]") Search I Tuomas Sandholm Carnegie Mellon University Computer Science Department [Read Russell & Norvig Chapter 3] Search I Goal-based agent (problem solving agent) Goal formulation (from preferences).
Search I Tuomas Sandholm Carnegie Mellon University Computer Science Department [Read Russell & Norvig Chapter 3] Search I Goal-based agent (problem solving agent) Goal formulation (from preferences).
Uninformed search methods
 Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework 1 Access through the course web page http://www.cs.pitt.edu/~milos/courses/cs2710/ Two
Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework 1 Access through the course web page http://www.cs.pitt.edu/~milos/courses/cs2710/ Two
On the Impact of Garbage Collection on flash-based SSD endurance
 On the Impact of Garbage Collection on flash-based SSD endurance Robin Verschoren and Benny Van Houdt Dept. Mathematics and Computer Science University of Antwerp Antwerp, Belgium INFLOW 16 Robin Verschoren
On the Impact of Garbage Collection on flash-based SSD endurance Robin Verschoren and Benny Van Houdt Dept. Mathematics and Computer Science University of Antwerp Antwerp, Belgium INFLOW 16 Robin Verschoren
Uninformed Search (Ch )
") 1 Uninformed Search (Ch. 3-3.4) 7 Small examples 8-Queens: how to fit 8 queens on a 8x8 board so no 2 queens can capture each other Two ways to model this: Incremental = each action is to add a queen to
1 Uninformed Search (Ch. 3-3.4) 7 Small examples 8-Queens: how to fit 8 queens on a 8x8 board so no 2 queens can capture each other Two ways to model this: Incremental = each action is to add a queen to
Supplementary Figures
 Supplementary Figures Supplementary Figure 1 Optimal number of pair extractions. The plots show the relationships between average number of checkerboard units in sets of 1000 randomizations of the Vanuatu
Supplementary Figures Supplementary Figure 1 Optimal number of pair extractions. The plots show the relationships between average number of checkerboard units in sets of 1000 randomizations of the Vanuatu
Ocean Fishing Fleet Scheduling Path Optimization Model Research. Based On Improved Ant Colony Algorithm
 4th International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 205) Ocean Fishing Fleet Scheduling Path Optimization Model Research Based On Improved Ant Colony Algorithm Li Jia-lin2,
4th International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 205) Ocean Fishing Fleet Scheduling Path Optimization Model Research Based On Improved Ant Colony Algorithm Li Jia-lin2,
Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs
 Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs Jehyun Cho a, Ghang Lee a, Jongsung Won a and Eunseo Ryu a a Dept. of Architectural Engineering, University of Yonsei,
Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs Jehyun Cho a, Ghang Lee a, Jongsung Won a and Eunseo Ryu a a Dept. of Architectural Engineering, University of Yonsei,
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART2) PROBLEM SOLVING AND SEARCH (Course coordinator) Searching
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART2) PROBLEM SOLVING AND SEARCH (Course coordinator) Searching
Topic Check In b and 10.01c Units and measurement N
 Topic Check In - 10.01b and 10.01c Units and measurement 1. A three figure bearing of 090 is the same as which direction on a compass? W E 2. A compass bearing of SW is the same as which three-figure bearing?
Topic Check In - 10.01b and 10.01c Units and measurement 1. A three figure bearing of 090 is the same as which direction on a compass? W E 2. A compass bearing of SW is the same as which three-figure bearing?
E. Agu, M. Kasperski Ruhr-University Bochum Department of Civil and Environmental Engineering Sciences
 EACWE 5 Florence, Italy 19 th 23 rd July 29 Flying Sphere image Museo Ideale L. Da Vinci Chasing gust fronts - wind measurements at the airport Munich, Germany E. Agu, M. Kasperski Ruhr-University Bochum
EACWE 5 Florence, Italy 19 th 23 rd July 29 Flying Sphere image Museo Ideale L. Da Vinci Chasing gust fronts - wind measurements at the airport Munich, Germany E. Agu, M. Kasperski Ruhr-University Bochum
4. Please Do Break the Crystal
 4. Please Do Break the Crystal Tell the broken plate you are sorry. Mary Robertson. Programming constructs and algorithmic paradigms covered in this puzzle: Break statements, radix representations. You
4. Please Do Break the Crystal Tell the broken plate you are sorry. Mary Robertson. Programming constructs and algorithmic paradigms covered in this puzzle: Break statements, radix representations. You
In order to have a fair and consistent National League, the following guidelines must be followed.
 MBO National League In order to have a fair and consistent National League, the following guidelines must be followed. Points System for League For the purposes of the league, competitors will only be
MBO National League In order to have a fair and consistent National League, the following guidelines must be followed. Points System for League For the purposes of the league, competitors will only be
Heap Sort. Lecture 35. Robb T. Koether. Hampden-Sydney College. Mon, Apr 25, 2016
 Heap Sort Lecture 35 Robb T. Koether Hampden-Sydney College Mon, Apr 25, 2016 Robb T. Koether (Hampden-Sydney College) Heap Sort Mon, Apr 25, 2016 1 / 14 1 Sorting 2 The Heap Sort Robb T. Koether (Hampden-Sydney
Heap Sort Lecture 35 Robb T. Koether Hampden-Sydney College Mon, Apr 25, 2016 Robb T. Koether (Hampden-Sydney College) Heap Sort Mon, Apr 25, 2016 1 / 14 1 Sorting 2 The Heap Sort Robb T. Koether (Hampden-Sydney
Depth-bounded Discrepancy Search
 Depth-bounded Discrepancy Search Toby Walsh* APES Group, Department of Computer Science University of Strathclyde, Glasgow Gl 1XL. Scotland tw@cs.strath.ac.uk Abstract Many search trees are impractically
Depth-bounded Discrepancy Search Toby Walsh* APES Group, Department of Computer Science University of Strathclyde, Glasgow Gl 1XL. Scotland tw@cs.strath.ac.uk Abstract Many search trees are impractically
(c) The hospital decided to collect the data from the first 50 patients admitted on July 4, 2010.
 The hospital decided to collect the data from the first 50 patients admitted on July 4, 2010.") Math 155, Test 1, 18 October 2011 Name: Instructions. This is a closed-book test. You may use a calculator (but not a cell phone). Make sure all cell-phones are put away and that the ringer is off. Show
Math 155, Test 1, 18 October 2011 Name: Instructions. This is a closed-book test. You may use a calculator (but not a cell phone). Make sure all cell-phones are put away and that the ringer is off. Show
Roundabouts along Rural Arterials in South Africa
 Krogscheepers & Watters 0 0 Word count: 00 text + figures = 0 equivalent words including Title and Abstract. Roundabouts along Rural Arterials in South Africa Prepared for: rd Annual Meeting of Transportation
Krogscheepers & Watters 0 0 Word count: 00 text + figures = 0 equivalent words including Title and Abstract. Roundabouts along Rural Arterials in South Africa Prepared for: rd Annual Meeting of Transportation
Uninformed Search Strategies
 Uninformed Search Strategies Instructor: Dr. Wei Ding Fall 2010 1 Uninformed Search Strategies Also called blind search. Have no additional information about states beyond that provided in the problem
Uninformed Search Strategies Instructor: Dr. Wei Ding Fall 2010 1 Uninformed Search Strategies Also called blind search. Have no additional information about states beyond that provided in the problem
Artificial Intelligence. Uninformed Search Strategies
 Artificial Intelligence Uninformed search strategies Uninformed Search Strategies Uninformed strategies use only the information available in the problem definition Also called Blind Search No info on
Artificial Intelligence Uninformed search strategies Uninformed Search Strategies Uninformed strategies use only the information available in the problem definition Also called Blind Search No info on
Advanced Search Hill climbing
 Advanced Search Hill climbing Yingyu Liang yliang@cs.wisc.edu Computer Sciences Department University of Wisconsin, Madison [Based on slides from Jerry Zhu, Andrew Moore http://www.cs.cmu.edu/~awm/tutorials
Advanced Search Hill climbing Yingyu Liang yliang@cs.wisc.edu Computer Sciences Department University of Wisconsin, Madison [Based on slides from Jerry Zhu, Andrew Moore http://www.cs.cmu.edu/~awm/tutorials
Decision Trees. an Introduction
 Decision Trees an Introduction Outline Top-Down Decision Tree Construction Choosing the Splitting Attribute Information Gain and Gain Ratio Decision Tree An internal node is a test on an attribute A branch
Decision Trees an Introduction Outline Top-Down Decision Tree Construction Choosing the Splitting Attribute Information Gain and Gain Ratio Decision Tree An internal node is a test on an attribute A branch
LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS
 LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS GARY B. PARKER and INGO CYLIAX Department of Computer Science, Indiana University, Bloomington, IN 47405 gaparker@cs.indiana.edu, cyliax@cs.indiana.edu
LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS GARY B. PARKER and INGO CYLIAX Department of Computer Science, Indiana University, Bloomington, IN 47405 gaparker@cs.indiana.edu, cyliax@cs.indiana.edu
Uninformed Search (Ch )
") 1 Uninformed Search (Ch. 3-3.4) 3 Terminology review State: a representation of a possible configuration of our problem Action: -how our agent interacts with the problem -can be different depending on
1 Uninformed Search (Ch. 3-3.4) 3 Terminology review State: a representation of a possible configuration of our problem Action: -how our agent interacts with the problem -can be different depending on
Geometric Task Decomposition in a Multi-Agent Environment
 Geometric Task Decomposition in a Multi-Agent Environment Kaivan Kamali 1, Dan Ventura 2, Amulya Garga 3, and Soundar R.T. Kumara 4 1 Department of Computer Science & Engineering 3 The Applied Research
Geometric Task Decomposition in a Multi-Agent Environment Kaivan Kamali 1, Dan Ventura 2, Amulya Garga 3, and Soundar R.T. Kumara 4 1 Department of Computer Science & Engineering 3 The Applied Research
COMP9414: Artificial Intelligence Uninformed Search
 COMP9, Monday March, 0 Uninformed Search COMP9: Artificial Intelligence Uninformed Search Overview Breadth-First Search Uniform Cost Search Wayne Wobcke Room J- wobcke@cse.unsw.edu.au Based on slides by
COMP9, Monday March, 0 Uninformed Search COMP9: Artificial Intelligence Uninformed Search Overview Breadth-First Search Uniform Cost Search Wayne Wobcke Room J- wobcke@cse.unsw.edu.au Based on slides by
Using an Adaptive Thresholding Algorithm to Detect CA1 Hippocampal Sharp Wave Ripples. Jay Patel. Michigan State University
 Using an Adaptive Thresholding Algorithm to Detect CA1 Hippocampal Sharp Wave Ripples Jay Patel Michigan State University Department of Physics and Astronomy, University of California, Los Angeles 2013
Using an Adaptive Thresholding Algorithm to Detect CA1 Hippocampal Sharp Wave Ripples Jay Patel Michigan State University Department of Physics and Astronomy, University of California, Los Angeles 2013
Exercise 11: Solution - Decision tree
 Exercise 11: Solution - Decision tree Given the obtained data and the fact that outcome of a match might also depend on the efforts Federera spent on it, we build the following training data set with the
Exercise 11: Solution - Decision tree Given the obtained data and the fact that outcome of a match might also depend on the efforts Federera spent on it, we build the following training data set with the
Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
Optimization and Search. Jim Tørresen Optimization and Search
 Optimization and Search INF3490 - Biologically inspired computing Lecture 1: Marsland chapter 9.1, 9.4-9.6 2017 Optimization and Search Jim Tørresen 2 Optimization and Search Methods (selection) Optimization
Optimization and Search INF3490 - Biologically inspired computing Lecture 1: Marsland chapter 9.1, 9.4-9.6 2017 Optimization and Search Jim Tørresen 2 Optimization and Search Methods (selection) Optimization
Has no formal authority but Coaches the Development Team in self-organization and crossfunctionality
 Scrum Master is a servant-leader for the Scrum Team. The Scrum Master helps those outside the Scrum Team understand which of their interactions with the Scrum Team are helpful and which aren t. The Scrum
Scrum Master is a servant-leader for the Scrum Team. The Scrum Master helps those outside the Scrum Team understand which of their interactions with the Scrum Team are helpful and which aren t. The Scrum
Significant Changes to California's Yellow Signal Timing Protocols
 Significant Changes to California's Yellow Signal Timing Protocols Previous Yellow Interval Timing Rules Permitted to use posted speed limit or prima facie speed limit in calculating the minimum yellow
Significant Changes to California's Yellow Signal Timing Protocols Previous Yellow Interval Timing Rules Permitted to use posted speed limit or prima facie speed limit in calculating the minimum yellow
Minnesota Department of Natural Resources Fisheries Division, Lake Superior Area
 Minnesota F-9-R(P)- Study 4 Job 616 Minnesota Department of Natural Resources Fisheries Division, Lake Superior Area Coaster Brook Trout Status in Minnesota-Lake Superior Tributaries Following Regulation
Minnesota F-9-R(P)- Study 4 Job 616 Minnesota Department of Natural Resources Fisheries Division, Lake Superior Area Coaster Brook Trout Status in Minnesota-Lake Superior Tributaries Following Regulation
APPENDIX A COMPUTATIONALLY GENERATED RANDOM DIGITS 748 APPENDIX C CHI-SQUARE RIGHT-HAND TAIL PROBABILITIES 754
 IV Appendices APPENDIX A COMPUTATIONALLY GENERATED RANDOM DIGITS 748 APPENDIX B RANDOM NUMBER TABLES 750 APPENDIX C CHI-SQUARE RIGHT-HAND TAIL PROBABILITIES 754 APPENDIX D LINEAR INTERPOLATION 755 APPENDIX
IV Appendices APPENDIX A COMPUTATIONALLY GENERATED RANDOM DIGITS 748 APPENDIX B RANDOM NUMBER TABLES 750 APPENDIX C CHI-SQUARE RIGHT-HAND TAIL PROBABILITIES 754 APPENDIX D LINEAR INTERPOLATION 755 APPENDIX
LESSONS FROM THE GREEN LANES: EVALUATING PROTECTED BIKE LANES IN THE U.S.
 LESSONS FROM THE GREEN LANES: EVALUATING PROTECTED BIKE LANES IN THE U.S. FINAL REPORT: APPENDIX C BICYCLIST ORIGIN AND DESTINATION ANALYSIS NITC-RR-583 by Alta Planning and Design Matt Berkow Kim Voros
LESSONS FROM THE GREEN LANES: EVALUATING PROTECTED BIKE LANES IN THE U.S. FINAL REPORT: APPENDIX C BICYCLIST ORIGIN AND DESTINATION ANALYSIS NITC-RR-583 by Alta Planning and Design Matt Berkow Kim Voros
Application of Computational Fluid Dynamics to Compressor Efficiency Improvement
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 1994 Application of Computational Fluid Dynamics to Compressor Efficiency Improvement J.
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 1994 Application of Computational Fluid Dynamics to Compressor Efficiency Improvement J.
Hockey Scholars: Math and Science Test Study Guide-Answer Key
 1. On this scatterplot, the skate blades with the largest radius of hollow are found in: Section C 2. Using this scatterplot, you can conclude that skate blades with the smallest radius of hollow tend
1. On this scatterplot, the skate blades with the largest radius of hollow are found in: Section C 2. Using this scatterplot, you can conclude that skate blades with the smallest radius of hollow tend
Bowls WA Women s Champion of Club Champion Singles Conditions of Play
 Bowls WA Women s Champion of Club Champion Singles Conditions of Play Eligibility: Entrants must be this season s winner of their Club Singles Championship. Controlling Body Bowls WA Fixtures and Events
Bowls WA Women s Champion of Club Champion Singles Conditions of Play Eligibility: Entrants must be this season s winner of their Club Singles Championship. Controlling Body Bowls WA Fixtures and Events
The Intrinsic Value of a Batted Ball Technical Details
 The Intrinsic Value of a Batted Ball Technical Details Glenn Healey, EECS Department University of California, Irvine, CA 9617 Given a set of observed batted balls and their outcomes, we develop a method
The Intrinsic Value of a Batted Ball Technical Details Glenn Healey, EECS Department University of California, Irvine, CA 9617 Given a set of observed batted balls and their outcomes, we develop a method
The Constrained Ski-Rental Problem and its Application to Online Cloud Cost Optimization
 The Constrained Ski-Rental Problem and its Application to Online Cloud Cost Optimization Ali Khanafer *, Murali Kodialam **, Krishna P. N. Puttaswamy ** * Coordinated Science Laboratory, UIUC ** Bell Laboratories,
The Constrained Ski-Rental Problem and its Application to Online Cloud Cost Optimization Ali Khanafer *, Murali Kodialam **, Krishna P. N. Puttaswamy ** * Coordinated Science Laboratory, UIUC ** Bell Laboratories,
The Champion UT Austin Villa 2003 Simulator Online Coach Team
 In Daniel Polani, Brett Browning, Andrea Bonarini and Kazuo Yoshida, editors, RoboCup-2003: Robot Soccer World Springer Verlag, Berlin, 2004. The Champion UT Austin Villa 2003 Simulator Online Coach Team
In Daniel Polani, Brett Browning, Andrea Bonarini and Kazuo Yoshida, editors, RoboCup-2003: Robot Soccer World Springer Verlag, Berlin, 2004. The Champion UT Austin Villa 2003 Simulator Online Coach Team
Evaluation of the ACC Vehicles in Mixed Traffic: Lane Change Effects and Sensitivity Analysis
 CALIFORNIA PATH PROGRAM INSTITUTE OF TRANSPORTATION STUDIES UNIVERSITY OF CALIFORNIA, BERKELEY Evaluation of the ACC Vehicles in Mixed Traffic: Lane Change Effects and Sensitivity Analysis Petros Ioannou,
CALIFORNIA PATH PROGRAM INSTITUTE OF TRANSPORTATION STUDIES UNIVERSITY OF CALIFORNIA, BERKELEY Evaluation of the ACC Vehicles in Mixed Traffic: Lane Change Effects and Sensitivity Analysis Petros Ioannou,
Percymon: A Pokemon Showdown Artifical Intelligence
 Percymon: A Pokemon Showdown Artifical Intelligence SUNet ID: Name: Repository: [h2o, vramesh2] [Harrison Ho, Varun Ramesh] github.com/rameshvarun/showdownbot 1 Introduction Pokemon is a popular role playing
Percymon: A Pokemon Showdown Artifical Intelligence SUNet ID: Name: Repository: [h2o, vramesh2] [Harrison Ho, Varun Ramesh] github.com/rameshvarun/showdownbot 1 Introduction Pokemon is a popular role playing
Mechanical Waves and Sound
 Mechanical Waves and Sound Mechanical Wave Medium Crest Trough Transverse wave Compression Rarefaction Longitudinal wave Surface wave Some Vocab to Know What are Mechanical Waves? Mechanical wave: disturbance
Mechanical Waves and Sound Mechanical Wave Medium Crest Trough Transverse wave Compression Rarefaction Longitudinal wave Surface wave Some Vocab to Know What are Mechanical Waves? Mechanical wave: disturbance
Efficient Gait Generation using Reinforcement Learning
 Efficient Gait Generation using Reinforcement Learning Josep M Porta and Enric Celaya Institut de Robòtica i Informàtica Industrial, UPC-CSIC, Barcelona, Spain. SYNOPSIS The use of a free gait becomes
Efficient Gait Generation using Reinforcement Learning Josep M Porta and Enric Celaya Institut de Robòtica i Informàtica Industrial, UPC-CSIC, Barcelona, Spain. SYNOPSIS The use of a free gait becomes
Tokyo: Simulating Hyperpath-Based Vehicle Navigations and its Impact on Travel Time Reliability
 CHAPTER 92 Tokyo: Simulating Hyperpath-Based Vehicle Navigations and its Impact on Travel Time Reliability Daisuke Fukuda, Jiangshan Ma, Kaoru Yamada and Norihito Shinkai 92.1 Introduction Most standard
CHAPTER 92 Tokyo: Simulating Hyperpath-Based Vehicle Navigations and its Impact on Travel Time Reliability Daisuke Fukuda, Jiangshan Ma, Kaoru Yamada and Norihito Shinkai 92.1 Introduction Most standard
2014 ARMY CROWELL OPEN
 West Point, NY Entry Deadline: 12:00 pm Monday, December 1 st, 2014 for heptathlon and pentathlon only 12:00 pm Wednesday, December 3 rd, 2014for all remaining events Entry Procedure: All entries will
West Point, NY Entry Deadline: 12:00 pm Monday, December 1 st, 2014 for heptathlon and pentathlon only 12:00 pm Wednesday, December 3 rd, 2014for all remaining events Entry Procedure: All entries will
Package ExactCIdiff. February 19, 2015
 Version 1.3 Date 2013-05-05 Package ExactCIdiff February 19, 2015 Title Inductive Confidence Intervals for the difference between two proportions Author Guogen Shan , Weizhen Wang
Version 1.3 Date 2013-05-05 Package ExactCIdiff February 19, 2015 Title Inductive Confidence Intervals for the difference between two proportions Author Guogen Shan , Weizhen Wang
Problem Solving as Search - I
 Problem Solving as Search - I Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University Slides prepared from Artificial Intelligence A Modern approach by Russell & Norvig Problem-Solving
Problem Solving as Search - I Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University Slides prepared from Artificial Intelligence A Modern approach by Russell & Norvig Problem-Solving
2008 Excellence in Mathematics Contest Team Project B. School Name: Group Members:
 2008 Excellence in Mathematics Contest Team Project B School Name: Group Members: Lassie - TEAM PROJECT B 2008 Excellence in Mathematics Contest The Team Project is a group activity in which the students
2008 Excellence in Mathematics Contest Team Project B School Name: Group Members: Lassie - TEAM PROJECT B 2008 Excellence in Mathematics Contest The Team Project is a group activity in which the students
IMPLEMENT GUIDANCE SYSTEMS
 IMPLEMENT GUIDANCE SYSTEMS KEEPING PULLED EQUIPMENT ON TRACK Satellite navigation systems on tractors keep the tractor on track - but they cannot always address the challenge of keeping the equipment that
IMPLEMENT GUIDANCE SYSTEMS KEEPING PULLED EQUIPMENT ON TRACK Satellite navigation systems on tractors keep the tractor on track - but they cannot always address the challenge of keeping the equipment that
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION Task and Rules Document
 NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
Diameter in cm. Bubble Number. Bubble Number Diameter in cm
 Bubble lab Data Sheet Blow bubbles and measure the diameter to the nearest whole centimeter. Record in the tables below. Try to blow different sized bubbles. Name: Bubble Number Diameter in cm Bubble Number
Bubble lab Data Sheet Blow bubbles and measure the diameter to the nearest whole centimeter. Record in the tables below. Try to blow different sized bubbles. Name: Bubble Number Diameter in cm Bubble Number
Customer Acquisition Pay-Plan
 Customer Acquisition Pay-Plan A New YOU Starts TODAY... With Anovité Our Compensation Plan The Anovite compensation plan was designed to provide you with multiple streams of income. With the Anovite opportunity,
Customer Acquisition Pay-Plan A New YOU Starts TODAY... With Anovité Our Compensation Plan The Anovite compensation plan was designed to provide you with multiple streams of income. With the Anovite opportunity,
Robust Task Execution: Procedural and Model-based. Outline. Desiderata: Robust Task-level Execution
 Robust Task Execution: Procedural and Model-based Mission Goals and Environment Constraints Temporal Planner Temporal Network Solver Projective Task Expansion Initial Conditions Temporal Plan Dynamic Scheduling
Robust Task Execution: Procedural and Model-based Mission Goals and Environment Constraints Temporal Planner Temporal Network Solver Projective Task Expansion Initial Conditions Temporal Plan Dynamic Scheduling
/435 Artificial Intelligence Fall 2015
 Final Exam 600.335/435 Artificial Intelligence Fall 2015 Name: Section (335/435): Instructions Please be sure to write both your name and section in the space above! Some questions will be exclusive to
Final Exam 600.335/435 Artificial Intelligence Fall 2015 Name: Section (335/435): Instructions Please be sure to write both your name and section in the space above! Some questions will be exclusive to
OPPDRAGSNUMMER STRANDVEIEN Vindanalyse
 OPPDRAGSNUMMER 256261 STRANDVEIEN 1 1.16 - Vindanalyse Wind comfort analysis Strandveien, LillestrØm 1 Disclaimer While Sweco considers that the information and opinions given in this work are sound, all
OPPDRAGSNUMMER 256261 STRANDVEIEN 1 1.16 - Vindanalyse Wind comfort analysis Strandveien, LillestrØm 1 Disclaimer While Sweco considers that the information and opinions given in this work are sound, all
WeatherTRAK ET plus Series Quick Reference Guide
 For 6, 9, 12, 18 and 24 station models plus Quick Start Guide WeatherTRAK plus Series Quick Reference Guide 3. 4. 5. 6. Upper line knob. Controls the upper line of the display. Function knob. Provides
For 6, 9, 12, 18 and 24 station models plus Quick Start Guide WeatherTRAK plus Series Quick Reference Guide 3. 4. 5. 6. Upper line knob. Controls the upper line of the display. Function knob. Provides
PROGRAMMING LINX LEARNING GAME
 PROGRAMMING LINX LEARNING GAME Linx Overview Linxis a game based on removing colored balls from a moving path by creating chains of three or more of the same color. Players control a firing mechanism (in
PROGRAMMING LINX LEARNING GAME Linx Overview Linxis a game based on removing colored balls from a moving path by creating chains of three or more of the same color. Players control a firing mechanism (in
Hardware Triaxial and Consolidation Testing Systems Pressure Measurement and Control
 25 GDS Helpsheet Hardware Triaxial and Consolidation Testing Systems Pressure Measurement and Control World Leaders in Computer Controlled Testing Systems for Geotechnical Engineers and Geologists 1. Digital
25 GDS Helpsheet Hardware Triaxial and Consolidation Testing Systems Pressure Measurement and Control World Leaders in Computer Controlled Testing Systems for Geotechnical Engineers and Geologists 1. Digital
Predicting the Total Number of Points Scored in NFL Games
 Predicting the Total Number of Points Scored in NFL Games Max Flores (mflores7@stanford.edu), Ajay Sohmshetty (ajay14@stanford.edu) CS 229 Fall 2014 1 Introduction Predicting the outcome of National Football
Predicting the Total Number of Points Scored in NFL Games Max Flores (mflores7@stanford.edu), Ajay Sohmshetty (ajay14@stanford.edu) CS 229 Fall 2014 1 Introduction Predicting the outcome of National Football
Special edition paper
 Development of a Track Management Method for Shinkansen Speed Increases Shigeaki Ono** Takehiko Ukai* We have examined the indicators of appropriate track management that represent the ride comfort when
Development of a Track Management Method for Shinkansen Speed Increases Shigeaki Ono** Takehiko Ukai* We have examined the indicators of appropriate track management that represent the ride comfort when
Balanced Binary Trees
 CSE : AVL TREES 2 Balanced Binary Trees Recall: Worst case for find in a BST is : Worst case for find in a Balanced BST is: 3 Balanced Binary Trees Deterministic Balancing Change insert and delete operations
CSE : AVL TREES 2 Balanced Binary Trees Recall: Worst case for find in a BST is : Worst case for find in a Balanced BST is: 3 Balanced Binary Trees Deterministic Balancing Change insert and delete operations
Implementing Provisions for Art. 411 of the ICR Ski Jumping
 JUMPING HILLS CONSTRUCTION NORM 2018 Implementing Provisions for Art. 411 of the ICR Ski Jumping Author: Hans-Heini Gasser (SUI) EDITION NOVEMBER 2018 Table of Contents Page 1. Preliminary Remarks 3 2.
JUMPING HILLS CONSTRUCTION NORM 2018 Implementing Provisions for Art. 411 of the ICR Ski Jumping Author: Hans-Heini Gasser (SUI) EDITION NOVEMBER 2018 Table of Contents Page 1. Preliminary Remarks 3 2.
Team 7416 HiMCM 2017 Page 1 of 24. Olympic ski slopes are difficult to plan, and a ranch in Utah is being evaluated to
 Team 7416 HiMCM 2017 Page 1 of 24 Summary Olympic ski slopes are difficult to plan, and a ranch in Utah is being evaluated to determine whether or not it should host an event. The measurements and difficulty
Team 7416 HiMCM 2017 Page 1 of 24 Summary Olympic ski slopes are difficult to plan, and a ranch in Utah is being evaluated to determine whether or not it should host an event. The measurements and difficulty
Navigation and Spatial Representation 1: Path integration in animals & humans
 Navigation and Spatial Representation 1: Path integration in animals & humans Slide# 1 Animal Navigation The Participants: ants, bees, chicks, rodents, humans Slide# 2 Disciplines and Methods: behavioral
Navigation and Spatial Representation 1: Path integration in animals & humans Slide# 1 Animal Navigation The Participants: ants, bees, chicks, rodents, humans Slide# 2 Disciplines and Methods: behavioral
CS Lecture 5. Vidroha debroy. Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute
 CS 3353 Lecture 5 Vidroha debroy Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute Searching for a number Find a specific number 91-3 26 54 73
CS 3353 Lecture 5 Vidroha debroy Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute Searching for a number Find a specific number 91-3 26 54 73
The Effect of Driver Mass and Shaft Length on Initial Golf Ball Launch Conditions: A Designed Experimental Study
 Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 379 384 9 th Conference of the International Sports Engineering Association (ISEA) The Effect of Driver Mass and Shaft Length on
Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 379 384 9 th Conference of the International Sports Engineering Association (ISEA) The Effect of Driver Mass and Shaft Length on
The Incremental Evolution of Gaits for Hexapod Robots
 The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
Estimating benefits of travel demand management measures
 Estimating benefits of travel demand management measures E. ~ani~uchi' and H. Hirao Department of Civil Engineering Systems, Kyoto University, Japan Abstract This paper presents models for estimating benefits
Estimating benefits of travel demand management measures E. ~ani~uchi' and H. Hirao Department of Civil Engineering Systems, Kyoto University, Japan Abstract This paper presents models for estimating benefits
ESTIMATION OF THE DESIGN WIND SPEED BASED ON
 The Seventh Asia-Pacific Conference on Wind Engineering, November 8-12, 2009, Taipei, Taiwan ESTIMATION OF THE DESIGN WIND SPEED BASED ON UNCERTAIN PARAMETERS OF THE WIND CLIMATE Michael Kasperski 1 1
The Seventh Asia-Pacific Conference on Wind Engineering, November 8-12, 2009, Taipei, Taiwan ESTIMATION OF THE DESIGN WIND SPEED BASED ON UNCERTAIN PARAMETERS OF THE WIND CLIMATE Michael Kasperski 1 1
-Elastic strain energy (duty factor decreases at higher speeds). Higher forces act on feet. More tendon stretch. More energy stored in tendon.
. Higher forces act on feet. More tendon stretch. More energy stored in tendon.") As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
Planning and Acting in Partially Observable Stochastic Domains
 Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
COLREGS Based Collision Avoidance of Unmanned Surface Vehicles
 COLREGS Based Collision Avoidance of Unmanned Surface Vehicles Aug 2nd, 2017 Michael R. Benjamin Kyle Woerner, Michael Novitzky, John Leonard MIT Dept. of Mechanical Engineering Computer Science and Artificial
COLREGS Based Collision Avoidance of Unmanned Surface Vehicles Aug 2nd, 2017 Michael R. Benjamin Kyle Woerner, Michael Novitzky, John Leonard MIT Dept. of Mechanical Engineering Computer Science and Artificial
Stat 139 Homework 3 Solutions, Spring 2015
 Stat 39 Homework 3 Solutions, Spring 05 Problem. Let i Nµ, σ ) for i,..., n, and j Nµ, σ ) for j,..., n. Also, assume that all observations are independent from each other. In Unit 4, we learned that the
Stat 39 Homework 3 Solutions, Spring 05 Problem. Let i Nµ, σ ) for i,..., n, and j Nµ, σ ) for j,..., n. Also, assume that all observations are independent from each other. In Unit 4, we learned that the
Practice Test Unit 06B 11A: Probability, Permutations and Combinations. Practice Test Unit 11B: Data Analysis
 Note to CCSD HS Pre-Algebra Teachers: 3 rd quarter benchmarks begin with the last 2 sections of Chapter 6 (probability, which we will refer to as 6B), and then address Chapter 11 benchmarks (which will
Note to CCSD HS Pre-Algebra Teachers: 3 rd quarter benchmarks begin with the last 2 sections of Chapter 6 (probability, which we will refer to as 6B), and then address Chapter 11 benchmarks (which will
Physics 1520, Spring 2014 Quiz 1A, Form: A
 Physics 1520, Spring 2014 Quiz 1A, Form: A Name: Date: Section 1. Multiple Choice 1. The image below shows two different types of sinusoidal waves produced on a slinky. Which wave is the same type of wave
Physics 1520, Spring 2014 Quiz 1A, Form: A Name: Date: Section 1. Multiple Choice 1. The image below shows two different types of sinusoidal waves produced on a slinky. Which wave is the same type of wave
Physics 1520, Spring 2014 Quiz 1B, Form: A
 Physics 1520, Spring 2014 Quiz 1B, Form: A Name: Date: Section 1. Multiple Choice Questions 1 2: The equations for two traveling waves traveling on the same string are: Wave 1: y(x, t) = (5.0 cm) cos((2.09
Physics 1520, Spring 2014 Quiz 1B, Form: A Name: Date: Section 1. Multiple Choice Questions 1 2: The equations for two traveling waves traveling on the same string are: Wave 1: y(x, t) = (5.0 cm) cos((2.09
Economic Value of Celebrity Endorsements:
 Economic Value of Celebrity Endorsements: Tiger Woods Impact on Sales of Nike Golf Balls September 27, 2012 On Line Appendix The Golf Equipments Golf Bags Golf bags are designed to transport the golf clubs
Economic Value of Celebrity Endorsements: Tiger Woods Impact on Sales of Nike Golf Balls September 27, 2012 On Line Appendix The Golf Equipments Golf Bags Golf bags are designed to transport the golf clubs
Usain Bolt He is fast! In fact the fastest, but just how fast is fast?
 Name per date mail box Usain Bolt He is fast! In fact the fastest, but just how fast is fast? At the Beijing Olympics in 2008 he earned three medals as a sprinter. In track and field and in much of the
Name per date mail box Usain Bolt He is fast! In fact the fastest, but just how fast is fast? At the Beijing Olympics in 2008 he earned three medals as a sprinter. In track and field and in much of the
Projectiles Shot up at an Angle
 Projectile Motion Notes: continued Projectiles Shot up at an Angle Think about a cannonball shot up at an angle, or a football punt kicked into the air, or a pop-fly thrown into the air. When a projectile
Projectile Motion Notes: continued Projectiles Shot up at an Angle Think about a cannonball shot up at an angle, or a football punt kicked into the air, or a pop-fly thrown into the air. When a projectile
SEDAR31-DW21. Examining delayed mortality in barotrauma afflicted red snapper using acoustic telemetry and hyperbaric experimentation
 Examining delayed mortality in barotrauma afflicted red snapper using acoustic telemetry and hyperbaric experimentation Gregory W. Stunz, Ph.D. Judd Curtis SEDAR31-DW21 10 August 2012 Examining delayed
Examining delayed mortality in barotrauma afflicted red snapper using acoustic telemetry and hyperbaric experimentation Gregory W. Stunz, Ph.D. Judd Curtis SEDAR31-DW21 10 August 2012 Examining delayed
Dear Future AP Statistics Student,
 Dear Future AP Statistics Student, In order to ensure we have adequate time for all curriculum in Advanced Placement Statistics, the math department has designed a pre-assignment to help introduce the
Dear Future AP Statistics Student, In order to ensure we have adequate time for all curriculum in Advanced Placement Statistics, the math department has designed a pre-assignment to help introduce the
ETplus. Programming the WeatherTRAK ETplus for Water Restriction Compliance
 Programming the WeatherTRAK ETplus for Water Restriction Compliance Water restrictions are becoming more common in many parts of the country. HydroPoint wants to make sure its customers are clearly informed
Programming the WeatherTRAK ETplus for Water Restriction Compliance Water restrictions are becoming more common in many parts of the country. HydroPoint wants to make sure its customers are clearly informed