COLREGS Based Collision Avoidance of Unmanned Surface Vehicles
|
|
|
- Ambrose Flynn
- 5 years ago
- Views:
Transcription

















































1 COLREGS Based Collision Avoidance of Unmanned Surface Vehicles Aug 2nd, 2017 Michael R. Benjamin Kyle Woerner, Michael Novitzky, John Leonard MIT Dept. of Mechanical Engineering Computer Science and Artificial Intelligence Lab Acknowledgements Office of Naval Research (ONR 333) has sponsors the COLREGS algorithm development. Dr. Robert Brizzolara. Office of Naval Research (ONR 311) has sponsored MOOS-IvP for nearly 10 years. Dr. Don Wagner, Dr. Behzad Kamgar-Parsi, Dr. Wen Masters. Battelle has sponsored, beginning in 2010, MOOS-IvP, MOOS, the development of our autonomy course at MIT, the purchase of the Heron platforms, and the build-out of our Marine Autonomy Bay facilities. Mr. Mike Mellott and Mr. Mike Kuhlman. Thales UK office has sponsored the COLREGS work, beginning in Faculty collaborators: Prof. Henrik Schmidt MIT MechE Prof. John Leonard MIT MechE/CSAIL Prof. Paul Newman Oxford 1




2 COLREGS Autonomy Idea: Enable autonomous surface vehicles to obey the Rules of the Road COLREGS. Establish a road test for validating the autonomous collision avoidance. COLREGS Autonomy Funded by: Office of Naval Research (ONR) Idea: Enable autonomous surface vehicles to obey the Rules of the Road COLREGS. Establish a road test for validating the autonomous collision avoidance. Research Focus: Map the protocols written for humans into algorithmic format. Find minimal set of field tests that validate widest set of scenario permutations. Crossing Situation Head-on Situation Technical Approach: Collision avoidance protocols mapped to set of modes, and sub-modes. Modes map to a unique form of objective function. Multi-objective optimization with IvP to solve. Impact: Autonomous long-duration coastal sampling with autonomous platforms. Multi-vehicle/swarm capabilities can be built on COLREGS foundation. 2


3 Payload UUV Autonomy (3 Architecture Principles) Payload Computer Main Vehicle Computer Payload Computer IvP Helm MOOS Middleware MOOS Applications Behavior-Based Modular HELM Autonomy Research Focus Areas Aquaticus RoboChallenge COLREGS Training/Documentation/V&V MOOS-IvP 3

4 Overview of the IvP Helm Behavior Output and Action Selection 1 Mail is read in the MOOS OnNewMail() function and applied to a local buffer. 2 The helm mode is determined, and set of running behaviors determined. 3 Behaviors execute posting MOOS variables and an IvP function. 4 Competing behaviors are resolved with the IvP solver. 5 The Helm decision and any behavior postings are published to the MOOSDB. Overview of the IvP Helm Behavior Output and Action Selection Behavior 1 Behavior 2 Behavior 3 f 1 (x 1, x 2,, x n ) f 2 (x 1, x 2,, x n ) f 3 (x 1, x 2,, x n )! x * =! argmax x k 1 i= 0 w i f i (! x ) Action Objective Functions Solver The objective functions are called IvP functions functions of a certain format. The Solver is called the IvP Solver they exploit the IvP function structure. Typical Decision Space: Heading, Speed, Depth 4



 f 1 f 2 f 3 The Search Tree: 1 level for each function n k leaf nodes (n")
5 IvP Functions The IvP Function vs. Underlying Function An IvP function is a piecewise linear approximation of an objective function, over a discrete decision space (domain). Piecewise Linear Approximation 525 Pieces Underlying Function Interval Programming Solution Algorithms Overview An IvP problem consists of a set of k functions, each with a priority weighting. The solution is given by:! x * =! argmax x k 1 i= 0 w i f i (! x ) f 1 f 2 f 3 The Search Tree: 1 level for each function n k leaf nodes (n pieces per function). The Solution algorithm: Branch and bound Pruning based on intersection lookahead. 5
 f 3 (x 1, x 2,, x n )! x * =! argmax x k 1 i= 0 w i f i (!")

6 Overview of the IvP Helm Behavior Output and Action Selection Behavior 1 Behavior 2 Behavior 3 f 1 (x 1, x 2,, x n ) f 2 (x 1, x 2,, x n ) f 3 (x 1, x 2,, x n )! x * =! argmax x k 1 i= 0 w i f i (! x ) Action Objective Functions Solver Example: Waypoint Traversal Behavior Overview of the IvP Helm Behavior Output and Action Selection Behavior 1 Behavior 2 Behavior 3 f 1 (x 1, x 2,, x n ) f 2 (x 1, x 2,, x n ) f 3 (x 1, x 2,, x n )! x * =! argmax x k 1 i= 0 w i f i (! x ) Action Objective Functions Solver Example: Collision Avoidance Behavior 6
! x * =! argmax x k 1 i= 0 w i f i (!")

7 Overview of the IvP Helm A Simple Collision Avoidance Example Behavior 1 Behavior 2 Behavior 3 f 1 (x 1, x 2,, x n ) f 2 (x 1, x 2,, x n ) f 3 (x 1, x 2,, x n )! x * =! argmax x k 1 i= 0 w i f i (! x ) Action Objective Functions Solver COLREGS Collision Avoidance (sponsored by ONR, Thales UK) The objective is to avoid collisions with other autonomous and non-autonomous vehicles. COLREGS are the rules of the road for seagoing vessels. They provide a protocol of roles and required actions between vessels. They were written for humans, not autonomous systems. Collision Avoidance WITHOUT COLREGS 7
8 What s Wrong with Non Protocol Based Collision Avoidance Consider the head-on situation If ownship rates candidate maneuvers based on closest point of approach, a maneuver to port or starboard looks equally good. 0 Ownship m/s 180 What s Wrong with Non Protocol Based Collision Avoidance Consider the head-on situation If ownship rates candidate maneuvers based on closest point of approach, a maneuver to port or starboard looks equally good. And the same is true for the contact, so It s possible one turns to port and the other to starboard, or vice versa. Contact 0 0 Ownship m/s m/s
9 COLREGS Collision Avoidance The head-on situation is referenced in Rule 14 of the COLREGS. When two power-driven vessels are meeting on a reciprocal or nearly reciprocal courses so as to involve a risk of collision each shall alter her course to the starboard so that each shall pass on the port side of the other The COLREGS IvP Behavior on ownship heavily penalizes the wrong kind of turn. 0 Ownship m/s 180 COLREGS Collision Avoidance The head-on situation is referenced in Rule 14 of the COLREGS. When two power-driven vessels are meeting on a reciprocal or nearly reciprocal courses so as to involve a risk of collision each shall alter her course to the starboard so that each shall pass on the port side of the other The COLREGS IvP Behavior on ownship heavily penalizes the wrong kind of turn. And, of course, so does the contact: Contact 0 0 Ownship m/s m/s

 The objective is to avoid collisions with other autonomous and non-autonomous vehicles.")
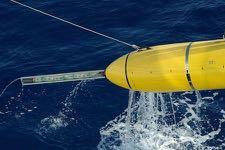
10 COLREGS Collision Avoidance The give-way (crossing) situation is referenced in Rule 15 of the COLREGS. When two power-driven vessels are crossing so as to involve risk of collision, the vessel which has the other on her own starboard side shall keep out of the way and shall, if the circumstances of the case admit, avoid crossing ahead of the other vessel. The give-way vehicle may cross ahead of the other vessel if it clearly makes more sense. 0 Ownship 2.4 m/s m/s 4 m/s 180 COLREGS Collision Avoidance (sponsored by ONR) The objective is to avoid collisions with other autonomous and non-autonomous vehicles. COLREGS are the rules of the road for seagoing vessels. They provide a protocol of roles and required actions between vessels. Collision Avoidance WITH COLREGS 10



11 Testing / Validation Simulation In-Water Tests Testing / Validation 11

12 Testing / Validation Testing / Validation 12

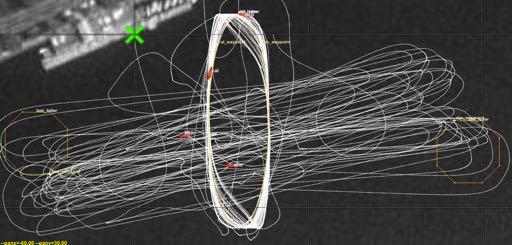
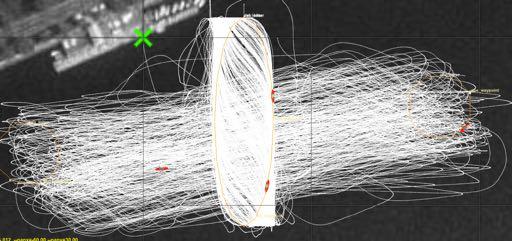
 Auto Generated Encounter Plots collision Encounter Plots Part of the")
13 How do we learn from the data? The Challenge: 12 hours of simulation 4 vehicles 1009 encounters RESULTS 1009 encounters 2 collisions -one 0.95m -one 7.5m 9 near misses (8-12m range) Auto Generated Encounter Plots collision Encounter Plots Part of the alogview tool Open Source Works on any mission log file Developed Nov 15 to present. In next release of MOOS-IvP collision Near miss range clear 13

")

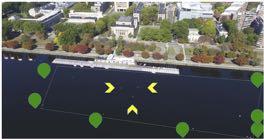
14 In-Water Tests Heron M300 (4) Human-operated Mokai 27 In-Water Tests Day mode 28 14

15 In-Water Tests Day mode 29 In-Water Tests 30 15

16 COLREGS Collision Avoidance (sponsored by ONR, Thales UK) Open Question: Does COLREGS Scale to larger sets of vehicles, swarms? END 16
Autonomy in the Open <Click Here to Download>
 Autonomy in the Open March 29th, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering Laboratory for Autonomous Marine Sensing Systems Computer Science and
Autonomy in the Open March 29th, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering Laboratory for Autonomous Marine Sensing Systems Computer Science and
Three Architectures Release 17.7 Michael Benjamin, Henrik Schmidt Thank You!! Three Architectures
 MOOS-DAWG 17 August 1st, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering oratory for Autonomous Marine Sensing Systems Computer Science and Artificial Intelligence mikerb@mit.edu
MOOS-DAWG 17 August 1st, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering oratory for Autonomous Marine Sensing Systems Computer Science and Artificial Intelligence mikerb@mit.edu
Legibility and Predictability of Protocol-Constrained Motion: Evaluating Human-Robot Ship Interactions Under COLREGS Collision Avoidance Requirements
 Legibility and Predictability of Protocol-Constrained Motion: Evaluating Human-Robot Ship Interactions Under COLREGS Collision Avoidance Requirements Kyle L. Woerner, Michael Novitzky, Michael R. Benjamin,
Legibility and Predictability of Protocol-Constrained Motion: Evaluating Human-Robot Ship Interactions Under COLREGS Collision Avoidance Requirements Kyle L. Woerner, Michael Novitzky, Michael R. Benjamin,
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys
 MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
Autonomous COLREGS Modes and Velocity Functions Michael R. Benjamin
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2017-009 May 16, 2017 Autonomous COLREGS Modes and Velocity Functions Michael R. Benjamin massachusetts institute of
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2017-009 May 16, 2017 Autonomous COLREGS Modes and Velocity Functions Michael R. Benjamin massachusetts institute of
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Collision Avoidance Road Test for COLREGS-Constrained Autonomous Vehicles*
 Collision Avoidance Road Test for COLREGS-Constrained Autonomous Vehicles* Kyle L. Woerner, Michael R. Benjamin, Michael Novitzky, and John J. Leonard Abstract Recently developed algorithms quantify and
Collision Avoidance Road Test for COLREGS-Constrained Autonomous Vehicles* Kyle L. Woerner, Michael R. Benjamin, Michael Novitzky, and John J. Leonard Abstract Recently developed algorithms quantify and
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey
 The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
Quantifying protocol evaluation for autonomous collision avoidance
 Quantifying protocol evaluation for autonomous collision avoidance The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published
Quantifying protocol evaluation for autonomous collision avoidance The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published
Navigation of Unmanned Marine Vehicles in Accordance with the Rules of the Road
 Navigation of Unmanned Marine Vehicles in Accordance with the Rules of the Road Under submission for peer-review publication May 26 Michael Benjamin NAVSEA Division Newport Newport RI 2841 Center of Ocean
Navigation of Unmanned Marine Vehicles in Accordance with the Rules of the Road Under submission for peer-review publication May 26 Michael Benjamin NAVSEA Division Newport Newport RI 2841 Center of Ocean
Collision in restricted visibility
 August 2018 Collision in restricted visibility Vessel A, a container vessel, was approaching the pilot station at full speed which was 17 knots and on a course of 280. It was in the afternoon there was
August 2018 Collision in restricted visibility Vessel A, a container vessel, was approaching the pilot station at full speed which was 17 knots and on a course of 280. It was in the afternoon there was
Quantifying protocol evaluation for autonomous collision avoidance
 https://doi.org/10.1007/s10514-018-9765-y Quantifying protocol evaluation for autonomous collision avoidance Toward establishing COLREGS compliance metrics Kyle Woerner 1 Michael R. Benjamin 1 Michael
https://doi.org/10.1007/s10514-018-9765-y Quantifying protocol evaluation for autonomous collision avoidance Toward establishing COLREGS compliance metrics Kyle Woerner 1 Michael R. Benjamin 1 Michael
AutonoVi-Sim: Modular Autonomous Vehicle Simulation Platform Supporting Diverse Vehicle Models, Sensor Configuration, and Traffic Conditions
 AutonoVi-Sim: Modular Autonomous Vehicle Simulation Platform Supporting Diverse Vehicle Models, Sensor Configuration, and Traffic Conditions Andrew Best, Sahil Narang, Lucas Pasqualin, Daniel Barber, Dinesh
AutonoVi-Sim: Modular Autonomous Vehicle Simulation Platform Supporting Diverse Vehicle Models, Sensor Configuration, and Traffic Conditions Andrew Best, Sahil Narang, Lucas Pasqualin, Daniel Barber, Dinesh
OPTIMIZATION OF MULTI-STAGE DECISION-MAKING PROCESS AT THE GAME MARINE ENVIRONMENT
 PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 114 Transport 216 Józef Lisowski Gdynia Maritime University, Faculty of Electrical Engineering, Department of Ship Automation OPTIMIZATION OF MULTI-STAGE DECISION-MAKING
PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 114 Transport 216 Józef Lisowski Gdynia Maritime University, Faculty of Electrical Engineering, Department of Ship Automation OPTIMIZATION OF MULTI-STAGE DECISION-MAKING
A smart navigation and collision avoidance approach for Autonomous Surface Vehicle
 Indian Journal of Geo Marine Sciences Vol. 46 (12), December 2017, pp. 2415-2421 A smart navigation and collision avoidance approach for Autonomous Surface Vehicle Jian Hong Mei 1,2 & M. R. Arshad 2 1
Indian Journal of Geo Marine Sciences Vol. 46 (12), December 2017, pp. 2415-2421 A smart navigation and collision avoidance approach for Autonomous Surface Vehicle Jian Hong Mei 1,2 & M. R. Arshad 2 1
Planning and Acting in Partially Observable Stochastic Domains
 Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
An experimental validation of a robust controller on the VAIMOS autonomous sailboat. Fabrice LE BARS
 An experimental validation of a robust controller on the VAIMOS autonomous sailboat Fabrice LE BARS Outline Introduction VAIMOS, an autonomous sailboat for oceanography Autonomy / control Theoretical validation
An experimental validation of a robust controller on the VAIMOS autonomous sailboat Fabrice LE BARS Outline Introduction VAIMOS, an autonomous sailboat for oceanography Autonomy / control Theoretical validation
NAEST(M) training Course Structure and Session Objectives. Day Introduction and enrolment
 training Course Structure and Session Objectives. Day Introduction and enrolment") NAEST(M) training Course Structure and Session Objectives Day 1 0830-0930 Introduction and enrolment 0930-1330 Effective Bridge Procedures & Rule of the Road Lecturer will go through the PowerPoint on
NAEST(M) training Course Structure and Session Objectives Day 1 0830-0930 Introduction and enrolment 0930-1330 Effective Bridge Procedures & Rule of the Road Lecturer will go through the PowerPoint on
COMP219: Artificial Intelligence. Lecture 8: Combining Search Strategies and Speeding Up
 COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up 1 Overview Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search
COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up 1 Overview Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search
Uninformed search methods II.
 CS 2710 Foundations of AI Lecture 4 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before
CS 2710 Foundations of AI Lecture 4 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs
 Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Using MATLAB with CANoe
 Version 2.0 2017-03-09 Application Note AN-IND-1-007 Author Restrictions Abstract Vector Informatik GmbH Public Document This application note describes the usage of MATLAB /Simulink combined with CANoe.
Version 2.0 2017-03-09 Application Note AN-IND-1-007 Author Restrictions Abstract Vector Informatik GmbH Public Document This application note describes the usage of MATLAB /Simulink combined with CANoe.
Collision Avoidance System using Common Maritime Information Environment.
 TEAM 2015, Oct. 12-15, 2015, Vladivostok, Russia Collision Avoidance System using Common Maritime Information Environment. Petrov Vladimir Alekseevich, the ass.professor, Dr. Tech. e-mail: petrov@msun.ru
TEAM 2015, Oct. 12-15, 2015, Vladivostok, Russia Collision Avoidance System using Common Maritime Information Environment. Petrov Vladimir Alekseevich, the ass.professor, Dr. Tech. e-mail: petrov@msun.ru
A Distributed Control System using CAN bus for an AUV
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
Uninformed search methods II.
 CS 1571 Introduction to AI Lecture 5 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Uninformed methods Uninformed search methods use only information available in
CS 1571 Introduction to AI Lecture 5 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Uninformed methods Uninformed search methods use only information available in
Introduction. AI and Searching. Simple Example. Simple Example. Now a Bit Harder. From Hammersmith to King s Cross
 Introduction AI and Searching We have seen how models of the environment allow an intelligent agent to dry run scenarios in its head without the need to act Logic allows premises to be tested Machine learning
Introduction AI and Searching We have seen how models of the environment allow an intelligent agent to dry run scenarios in its head without the need to act Logic allows premises to be tested Machine learning
G53CLP Constraint Logic Programming
 G53CLP Constraint Logic Programming Dr Rong Qu Basic Search Strategies CP Techniques Constraint propagation* Basic search strategies Look back, look ahead Search orders B & B *So far what we ve seen is
G53CLP Constraint Logic Programming Dr Rong Qu Basic Search Strategies CP Techniques Constraint propagation* Basic search strategies Look back, look ahead Search orders B & B *So far what we ve seen is
Site Planning and On-Board Collision Avoidance Software to Optimize Autonomous Surface Craft Surveys
 University of Rhode Island DigitalCommons@URI Open Access Master's Theses 2013 Site Planning and On-Board Collision Avoidance Software to Optimize Autonomous Surface Craft Surveys Michael A. Filimon University
University of Rhode Island DigitalCommons@URI Open Access Master's Theses 2013 Site Planning and On-Board Collision Avoidance Software to Optimize Autonomous Surface Craft Surveys Michael A. Filimon University
Evaluating chaff fire pattern algorithms in a simulation environment. JP du Plessis Institute for Maritime Technology South Africa
 Evaluating chaff fire pattern algorithms in a simulation environment JP du Plessis (jdp@imt.co.za) Institute for Maritime Technology South Africa Overview What is seduction chaff? Chaff solution algorithm
Evaluating chaff fire pattern algorithms in a simulation environment JP du Plessis (jdp@imt.co.za) Institute for Maritime Technology South Africa Overview What is seduction chaff? Chaff solution algorithm
Overview. Depth Limited Search. Depth Limited Search. COMP219: Artificial Intelligence. Lecture 8: Combining Search Strategies and Speeding Up
 COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search cheap
COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search cheap
BHATNAGAR. Reducing Delay in V2V-AEB System by Optimizing Messages in the System
 Reducing Delay in V2V-AEB System by Optimizing Messages in the System Shalabh Bhatanagar Stanley Chien Yaobin Chen TASI, IUPUI, Indianapolis USA Paper Number: 17-0330 ABSTRACT In V2V-AEB (Vehicle to Vehicle
Reducing Delay in V2V-AEB System by Optimizing Messages in the System Shalabh Bhatanagar Stanley Chien Yaobin Chen TASI, IUPUI, Indianapolis USA Paper Number: 17-0330 ABSTRACT In V2V-AEB (Vehicle to Vehicle
MUNIN s Autonomous Bridge
 MUNIN s Autonomous Bridge MUNIN Final Event June 10 th 2015, Hamburg, Germany Dipl.-Wirt.-Ing. Wilko C. Bruhn Research Associate Fraunhofer CML http://www.unmanned-ship.org SST.2012.5.2-5: Grant no. 314286
MUNIN s Autonomous Bridge MUNIN Final Event June 10 th 2015, Hamburg, Germany Dipl.-Wirt.-Ing. Wilko C. Bruhn Research Associate Fraunhofer CML http://www.unmanned-ship.org SST.2012.5.2-5: Grant no. 314286
AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION
 AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION OMAR AHMAD oahmad@nads-sc.uiowa.edu YIANNIS E. PAPELIS yiannis@nads-sc.uiowa.edu National Advanced Driving
AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION OMAR AHMAD oahmad@nads-sc.uiowa.edu YIANNIS E. PAPELIS yiannis@nads-sc.uiowa.edu National Advanced Driving
Traffic circles. February 9, 2009
 Traffic circles February 9, 2009 Abstract The use of a traffic circle is a relatively common means of controlling traffic in an intersection. Smaller Traffic circles can be especially effective in routing
Traffic circles February 9, 2009 Abstract The use of a traffic circle is a relatively common means of controlling traffic in an intersection. Smaller Traffic circles can be especially effective in routing
IMPLEMENTATION OF TRAFFIC SEPARATION SCHEME FOR PREVENTING ACCIDENTS ON THE SUNDA STRAIT
 International Journal of Technology (2015) 6: 990-997 ISSN 2086-9614 IJTech 2015 IMPLEMENTATION OF TRAFFIC SEPARATION SCHEME FOR PREVENTING ACCIDENTS ON THE SUNDA STRAIT Sunaryo 1*, Antoni Arif Priadi
International Journal of Technology (2015) 6: 990-997 ISSN 2086-9614 IJTech 2015 IMPLEMENTATION OF TRAFFIC SEPARATION SCHEME FOR PREVENTING ACCIDENTS ON THE SUNDA STRAIT Sunaryo 1*, Antoni Arif Priadi
Problem Solving as Search - I
 Problem Solving as Search - I Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University Slides prepared from Artificial Intelligence A Modern approach by Russell & Norvig Problem-Solving
Problem Solving as Search - I Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University Slides prepared from Artificial Intelligence A Modern approach by Russell & Norvig Problem-Solving
Spacecraft Simulation Tool. Debbie Clancy JHU/APL
 FSW Workshop 2011 Using Flight Software in a Spacecraft Simulation Tool Debbie Clancy JHU/APL debbie.clancy@jhuapl.edu 443-778-7721 Agenda Overview of RBSP and FAST Technical Challenges Dropping FSW into
FSW Workshop 2011 Using Flight Software in a Spacecraft Simulation Tool Debbie Clancy JHU/APL debbie.clancy@jhuapl.edu 443-778-7721 Agenda Overview of RBSP and FAST Technical Challenges Dropping FSW into
Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling
 Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
CS472 Foundations of Artificial Intelligence. Final Exam December 19, :30pm
 CS472 Foundations of Artificial Intelligence Final Exam December 19, 2003 12-2:30pm Name: (Q exam takers should write their Number instead!!!) Instructions: You have 2.5 hours to complete this exam. The
CS472 Foundations of Artificial Intelligence Final Exam December 19, 2003 12-2:30pm Name: (Q exam takers should write their Number instead!!!) Instructions: You have 2.5 hours to complete this exam. The
Better Search Improved Uninformed Search CIS 32
 Better Search Improved Uninformed Search CIS 32 Functionally PROJECT 1: Lunar Lander Game - Demo + Concept - Open-Ended: No One Solution - Menu of Point Options - Get Started NOW!!! - Demo After Spring
Better Search Improved Uninformed Search CIS 32 Functionally PROJECT 1: Lunar Lander Game - Demo + Concept - Open-Ended: No One Solution - Menu of Point Options - Get Started NOW!!! - Demo After Spring
Maritime Traffic Situations in Bornholmsgat
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 9 Number 1 March 2015 DOI: 10.12716/1001.09.01.14 Maritime Traffic Situations in Bornholmsgat
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 9 Number 1 March 2015 DOI: 10.12716/1001.09.01.14 Maritime Traffic Situations in Bornholmsgat
International regulations and guidelines for maritime spatial planning related to safe distances to multiple offshore structures (e.g.
 International regulations and guidelines for maritime spatial planning related to safe distances to multiple offshore structures (e.g. wind farms) Introduction This is a summary of the most important international
International regulations and guidelines for maritime spatial planning related to safe distances to multiple offshore structures (e.g. wind farms) Introduction This is a summary of the most important international
UNIT Coastal Navigation 1 (Intermediate 1)
") National Unit Specification: general information NUMBER DC63 10 COURSE SUMMARY This unit is designed to enable candidates to understand the basic elements of coastal navigation and to plan a coastal passage
National Unit Specification: general information NUMBER DC63 10 COURSE SUMMARY This unit is designed to enable candidates to understand the basic elements of coastal navigation and to plan a coastal passage
Artificial Intelligence for the EChO Mission Scheduler
 Artificial Intelligence for the EChO Mission Scheduler Álvaro García Piquer Ignasi Ribas Josep Colomé Institute of Space Sciences (CSIC/IEEC), Barcelona, Spain SCIOPS 2013 September 10 13, 2013 Introduction
Artificial Intelligence for the EChO Mission Scheduler Álvaro García Piquer Ignasi Ribas Josep Colomé Institute of Space Sciences (CSIC/IEEC), Barcelona, Spain SCIOPS 2013 September 10 13, 2013 Introduction
Virtual Breadboarding. John Vangelov Ford Motor Company
 Virtual Breadboarding John Vangelov Ford Motor Company What is Virtual Breadboarding? Uses Vector s CANoe product, to simulate MATLAB Simulink models in a simulated or real vehicle environment. Allows
Virtual Breadboarding John Vangelov Ford Motor Company What is Virtual Breadboarding? Uses Vector s CANoe product, to simulate MATLAB Simulink models in a simulated or real vehicle environment. Allows
Evolutionary approach to ship s trajectory planning within Traffic Separation Schemes
 POLISH MARITIME RESEARCH 1(72) 2012 Vol 19; pp. 11-20 10.2478/v10012-012-0002-x Evolutionary approach to ship s trajectory planning within Traffic Separation Schemes Rafał Szłapczyński, Ph. D. Gdańsk University
POLISH MARITIME RESEARCH 1(72) 2012 Vol 19; pp. 11-20 10.2478/v10012-012-0002-x Evolutionary approach to ship s trajectory planning within Traffic Separation Schemes Rafał Szłapczyński, Ph. D. Gdańsk University
unsignalized signalized isolated coordinated Intersections roundabouts Highway Capacity Manual level of service control delay
 Whether unsignalized or signalized, isolated or coordinated, you can use TransModeler to simulate intersections with greater detail and accuracy than any other microsimulation software. TransModeler allows
Whether unsignalized or signalized, isolated or coordinated, you can use TransModeler to simulate intersections with greater detail and accuracy than any other microsimulation software. TransModeler allows
European Defence Agency / SARUMS
 14.CAT.OP.065 Liability for Operations in Unmanned Maritime Vehicles with Differing Levels of Autonomy European Defence Agency / SARUMS Robert Veal Senior Research Fellow, Institute of Maritime Law 14.CAT.OP.065
14.CAT.OP.065 Liability for Operations in Unmanned Maritime Vehicles with Differing Levels of Autonomy European Defence Agency / SARUMS Robert Veal Senior Research Fellow, Institute of Maritime Law 14.CAT.OP.065
TASK-BASED INTERFACES FOR DECENTRALIZED MULTIPLE UNMANNED VEHICLE CONTROL
 AUVSI 11 Clare TASK-BASED INTERFACES FOR DECENTRALIZED MULTIPLE UNMANNED VEHICLE CONTROL Andrew S. Clare * and Mary L. Cummings INTRODUCTION Enhanced autonomy in Unmanned Vehicles (UV) has given human
AUVSI 11 Clare TASK-BASED INTERFACES FOR DECENTRALIZED MULTIPLE UNMANNED VEHICLE CONTROL Andrew S. Clare * and Mary L. Cummings INTRODUCTION Enhanced autonomy in Unmanned Vehicles (UV) has given human
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
Fluid-Structure Interaction Analysis of a Flow Control Device
 Abaqus Technology Brief Fluid-Structure Interaction Analysis of a Control Device TB-06-FSI-2 Revised: April 2007. Summary The Vernay VernaFlo flow controls are custom-designed fluid flow management devices
Abaqus Technology Brief Fluid-Structure Interaction Analysis of a Control Device TB-06-FSI-2 Revised: April 2007. Summary The Vernay VernaFlo flow controls are custom-designed fluid flow management devices
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART2) PROBLEM SOLVING AND SEARCH (Course coordinator) Searching
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART2) PROBLEM SOLVING AND SEARCH (Course coordinator) Searching
Lecturers. Multi-Agent Systems. Exercises: Dates. Lectures. Prof. Dr. Bernhard Nebel Room Dr. Felix Lindner Room
 Lecturers Multi-Agent Systems Prof. Dr. Bernhard Nebel Room 52-00-028 Phone: 0761/203-8221 email: nebel@informatik.uni-freiburg.de Albert-Ludwigs-Universität Freiburg Dr. Felix Lindner Room 52-00-043 Phone:
Lecturers Multi-Agent Systems Prof. Dr. Bernhard Nebel Room 52-00-028 Phone: 0761/203-8221 email: nebel@informatik.uni-freiburg.de Albert-Ludwigs-Universität Freiburg Dr. Felix Lindner Room 52-00-043 Phone:
Simulation Model Portability 2 standard support in EuroSim Mk4
 Simulation Portability 2 standard support in EuroSim Mk4 Jeroen Moelands EuroSim Design Leader (moelands@nlr.nl) Collaborative Engineering Systems department National Aerospace Laboratory NLR EuroSim Workshop
Simulation Portability 2 standard support in EuroSim Mk4 Jeroen Moelands EuroSim Design Leader (moelands@nlr.nl) Collaborative Engineering Systems department National Aerospace Laboratory NLR EuroSim Workshop
The Cooperative Cleaners Case Study: Modelling and Analysis in Real-Time ABS
 : Modelling and Analysis in Real-Time ABS Silvia Lizeth Tapia Tarifa Precise Modelling and Analysis University of Oslo sltarifa@ifi.uio.no 29.11.2013 S. Lizeth Tapia Tarifa Outline Motivation 1 Motivation
: Modelling and Analysis in Real-Time ABS Silvia Lizeth Tapia Tarifa Precise Modelling and Analysis University of Oslo sltarifa@ifi.uio.no 29.11.2013 S. Lizeth Tapia Tarifa Outline Motivation 1 Motivation
REGULATORY SCOPING EXERCISE FOR THE USE OF MARITIME AUTONOMOUS SURFACE SHIPS (MASS)
") E MARITIME SAFETY COMMITTEE 100th session Agenda item 5 MSC 100/INF.6 28 September 2018 ENGLISH ONLY REGULATORY SCOPING EXERCISE FOR THE USE OF MARITIME AUTONOMOUS SURFACE SHIPS (MASS) Preliminary analysis
E MARITIME SAFETY COMMITTEE 100th session Agenda item 5 MSC 100/INF.6 28 September 2018 ENGLISH ONLY REGULATORY SCOPING EXERCISE FOR THE USE OF MARITIME AUTONOMOUS SURFACE SHIPS (MASS) Preliminary analysis
Hydrodynamic analysis of submersible robot
 International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 1; Issue 9; September 2016; Page No. 20-24 Hydrodynamic analysis of submersible
International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 1; Issue 9; September 2016; Page No. 20-24 Hydrodynamic analysis of submersible
SWARM INTELLIGENCE APPROACH TO SAFE SHIP CONTROL
 POLISH MARITIME RESEARCH 4(88) 2015 Vol. 22; pp. 34-40 10.1515/pomr-2015-0068 SWARM INTELLIGENCE APPROACH TO SAFE SHIP CONTROL Agnieszka Lazarowska Gdynia Maritime University, Poland ABSTRACT This paper
POLISH MARITIME RESEARCH 4(88) 2015 Vol. 22; pp. 34-40 10.1515/pomr-2015-0068 SWARM INTELLIGENCE APPROACH TO SAFE SHIP CONTROL Agnieszka Lazarowska Gdynia Maritime University, Poland ABSTRACT This paper
E Navigation Data Auditing Report
 E Navigation Data Auditing Report Ship s Name Name_not_disclosed Period March 1 st to 31 st, 2016 General 1. Introduction. The data from the above ship was analyzed in order to carry our Navigational Audit
E Navigation Data Auditing Report Ship s Name Name_not_disclosed Period March 1 st to 31 st, 2016 General 1. Introduction. The data from the above ship was analyzed in order to carry our Navigational Audit
Solving MINLPs with BARON. Mustafa Kılınç & Nick Sahinidis Department of Chemical Engineering Carnegie Mellon University
 Solving MINLPs with BARON Mustafa Kılınç & Nick Sahinidis Department of Chemical Engineering Carnegie Mellon University MINLP 2014 Carnegie Mellon University June 4, 2014 MIXED-INTEGER NONLINEAR PROGRAMS
Solving MINLPs with BARON Mustafa Kılınç & Nick Sahinidis Department of Chemical Engineering Carnegie Mellon University MINLP 2014 Carnegie Mellon University June 4, 2014 MIXED-INTEGER NONLINEAR PROGRAMS
Application of Bayesian Networks to Shopping Assistance
 Application of Bayesian Networks to Shopping Assistance Yang Xiang, Chenwen Ye, and Deborah Ann Stacey University of Guelph, CANADA Abstract. We develop an on-line shopping assistant that can help a e-shopper
Application of Bayesian Networks to Shopping Assistance Yang Xiang, Chenwen Ye, and Deborah Ann Stacey University of Guelph, CANADA Abstract. We develop an on-line shopping assistant that can help a e-shopper
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
IDENTIFYING SKILL GAPS IN THE KNOWLEDGE AND TEACHING OF COLREGS
 IDENTIFYING SKILL GAPS IN THE KNOWLEDGE AND TEACHING OF COLREGS ABSTRACT Đani Mohović, Ph.D. Robert Mohović, Ph.D. Mate Barić, B.Sc. University of Rijeka Faculty of Maritime Studie Studentska 2, 51000
IDENTIFYING SKILL GAPS IN THE KNOWLEDGE AND TEACHING OF COLREGS ABSTRACT Đani Mohović, Ph.D. Robert Mohović, Ph.D. Mate Barić, B.Sc. University of Rijeka Faculty of Maritime Studie Studentska 2, 51000
Advanced Applications in Naval Architecture Beyond the Prescriptions in Class Society Rules
 Advanced Applications in Naval Architecture Beyond the Prescriptions in Class Society Rules CAE Naval 2013, 13/06/2013 Sergio Mello Norman Neumann Advanced Applications in Naval Architecture Introduction
Advanced Applications in Naval Architecture Beyond the Prescriptions in Class Society Rules CAE Naval 2013, 13/06/2013 Sergio Mello Norman Neumann Advanced Applications in Naval Architecture Introduction
BEHAVIOR OF SHIP OFFICERS IN MANEUVERING TO PREVENT A COLLISION
 Journal of Marine Science and Technology, Vol. 14, No. 4, pp. 225-230 (2006) 225 BEHAVIOR OF SHIP OFFICERS IN MANEUVERING TO PREVENT A COLLISION Bin Lin* Key words: navigational safety, ship collision,
Journal of Marine Science and Technology, Vol. 14, No. 4, pp. 225-230 (2006) 225 BEHAVIOR OF SHIP OFFICERS IN MANEUVERING TO PREVENT A COLLISION Bin Lin* Key words: navigational safety, ship collision,
A Numerical Simulation of Fluid-Structure Interaction for Refrigerator Compressors Suction and Exhaust System Performance Analysis
 1131, Page 1 A Numerical Simulation of Fluid-Structure Interaction for Refrigerator Compressors Suction and Exhaust System Performance Analysis Shoufei Wu*, Zonghuai Wang Jiaxipera Compressor Co., Ltd.,
1131, Page 1 A Numerical Simulation of Fluid-Structure Interaction for Refrigerator Compressors Suction and Exhaust System Performance Analysis Shoufei Wu*, Zonghuai Wang Jiaxipera Compressor Co., Ltd.,
ISOLATION OF NON-HYDROSTATIC REGIONS WITHIN A BASIN
 ISOLATION OF NON-HYDROSTATIC REGIONS WITHIN A BASIN Bridget M. Wadzuk 1 (Member, ASCE) and Ben R. Hodges 2 (Member, ASCE) ABSTRACT Modeling of dynamic pressure appears necessary to achieve a more robust
ISOLATION OF NON-HYDROSTATIC REGIONS WITHIN A BASIN Bridget M. Wadzuk 1 (Member, ASCE) and Ben R. Hodges 2 (Member, ASCE) ABSTRACT Modeling of dynamic pressure appears necessary to achieve a more robust
CSE 3401: Intro to AI & LP Uninformed Search II
 CSE 3401: Intro to AI & LP Uninformed Search II Required Readings: R & N Chapter 3, Sec. 1-4. 1 {Arad}, {Zerind, Timisoara, Sibiu}, {Zerind, Timisoara, Arad, Oradea, Fagaras, RimnicuVilcea }, {Zerind,
CSE 3401: Intro to AI & LP Uninformed Search II Required Readings: R & N Chapter 3, Sec. 1-4. 1 {Arad}, {Zerind, Timisoara, Sibiu}, {Zerind, Timisoara, Arad, Oradea, Fagaras, RimnicuVilcea }, {Zerind,
The Use of Genetic Algorithm for Traffic Light and Pedestrian Crossing Control
 88 The Use of Genetic Algorithm for Traffic Light and Pedestrian Crossing Control Ayad Mashaan Turky, Mohd Sharifuddin Ahmad and Mohd Zaliman Mohd Yusoff, University Tenaga Nasional, Km 7, Jalan Kajang-Puchong,
88 The Use of Genetic Algorithm for Traffic Light and Pedestrian Crossing Control Ayad Mashaan Turky, Mohd Sharifuddin Ahmad and Mohd Zaliman Mohd Yusoff, University Tenaga Nasional, Km 7, Jalan Kajang-Puchong,
Traffic flow optimization at sags by controlling the acceleration of some vehicles
 Traffic flow optimization at sags by controlling the acceleration of some vehicles? Bernat Goñi-Ros Delft University of Technology b.goniros@tudelft.nl TGF 15 Nootdorp (Netherlands) / 28 Oct. 2015 Characteristics
Traffic flow optimization at sags by controlling the acceleration of some vehicles? Bernat Goñi-Ros Delft University of Technology b.goniros@tudelft.nl TGF 15 Nootdorp (Netherlands) / 28 Oct. 2015 Characteristics
One Dimensional Kinematics Challenge Problems
 One Dimensional Kinematics Challenge Problems Problem 1: One-Dimensional Kinematics: Two stones are released from rest at a certain height, one after the other. a) Will the difference between their speeds
One Dimensional Kinematics Challenge Problems Problem 1: One-Dimensional Kinematics: Two stones are released from rest at a certain height, one after the other. a) Will the difference between their speeds
PropaGator Autonomous Surface Vehicle
 PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
MoLE Gas Laws Activities
 MoLE Gas Laws Activities To begin this assignment you must be able to log on to the Internet using Internet Explorer (Microsoft) 4.5 or higher. If you do not have the current version of the browser, go
MoLE Gas Laws Activities To begin this assignment you must be able to log on to the Internet using Internet Explorer (Microsoft) 4.5 or higher. If you do not have the current version of the browser, go
Robust Task Execution: Procedural and Model-based. Outline. Desiderata: Robust Task-level Execution
 Robust Task Execution: Procedural and Model-based Mission Goals and Environment Constraints Temporal Planner Temporal Network Solver Projective Task Expansion Initial Conditions Temporal Plan Dynamic Scheduling
Robust Task Execution: Procedural and Model-based Mission Goals and Environment Constraints Temporal Planner Temporal Network Solver Projective Task Expansion Initial Conditions Temporal Plan Dynamic Scheduling
6.034 Artificial Intelligence
 Massachusetts Institute of Technology 6.034 Artificial Intelligence Examination Solutions # 1 Problem 1 Enforcing the Rules on Wall Street (30 points) Part A (12 points) Worksheet Initial Database Joe
Massachusetts Institute of Technology 6.034 Artificial Intelligence Examination Solutions # 1 Problem 1 Enforcing the Rules on Wall Street (30 points) Part A (12 points) Worksheet Initial Database Joe
Olympus Production Contour Plot
 Olympus Production Contour Plot Overview An alternative to the Scale Scenario calculation is the Contour Diagram. The conditions defined in the Scale Scenario are specific to production locations (wellhead,
Olympus Production Contour Plot Overview An alternative to the Scale Scenario calculation is the Contour Diagram. The conditions defined in the Scale Scenario are specific to production locations (wellhead,
CSE 3402: Intro to Artificial Intelligence Uninformed Search II
 CSE 3402: Intro to Artificial Intelligence Uninformed Search II Required Readings: Chapter 3, Sec. 1-4. 1 {Arad}, {Zerind, Timisoara, Sibiu}, {Zerind, Timisoara, Arad, Oradea, Fagaras, RimnicuVilcea },
CSE 3402: Intro to Artificial Intelligence Uninformed Search II Required Readings: Chapter 3, Sec. 1-4. 1 {Arad}, {Zerind, Timisoara, Sibiu}, {Zerind, Timisoara, Arad, Oradea, Fagaras, RimnicuVilcea },
Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists
 Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists What is VENTURER? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate
Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists What is VENTURER? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate
Ocean Fishing Fleet Scheduling Path Optimization Model Research. Based On Improved Ant Colony Algorithm
 4th International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 205) Ocean Fishing Fleet Scheduling Path Optimization Model Research Based On Improved Ant Colony Algorithm Li Jia-lin2,
4th International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 205) Ocean Fishing Fleet Scheduling Path Optimization Model Research Based On Improved Ant Colony Algorithm Li Jia-lin2,
Lecture 1 Temporal constraints: source and characterization
 Real-Time Systems Lecture 1 Temporal constraints: source and characterization Basic concepts about real-time Requirements of Real-Time Systems Adapted from the slides developed by Prof. Luís Almeida for
Real-Time Systems Lecture 1 Temporal constraints: source and characterization Basic concepts about real-time Requirements of Real-Time Systems Adapted from the slides developed by Prof. Luís Almeida for
INTERNATIONAL Steering and Sailing Rules
 INTERNATIONAL Section II Conduct of Vessels in Sight of One Another RULE 11 Application Rules in this section apply to vessels in sight of one another. RULE 12 Sailing Vessels (a) When two sailing vessels
INTERNATIONAL Section II Conduct of Vessels in Sight of One Another RULE 11 Application Rules in this section apply to vessels in sight of one another. RULE 12 Sailing Vessels (a) When two sailing vessels
Automating Injection Molding Simulation using Autonomous Optimization
 Automating Injection Molding Simulation using Autonomous Optimization Matt Proske, Rodrigo Gutierrez, & Gabriel Geyne SIGMASOFT Virtual Molding Autonomous optimization is coupled to injection molding simulation
Automating Injection Molding Simulation using Autonomous Optimization Matt Proske, Rodrigo Gutierrez, & Gabriel Geyne SIGMASOFT Virtual Molding Autonomous optimization is coupled to injection molding simulation
iii) Satisfactory completion of approved training in the following:
 Satisfactory completion of approved training in the following:") Enclosure (1) to NVIC 13-14 DISCUSSION OF QUALIFICATION REQUIREMENTS FOR MASTER AND OFFICER IN CHARGE OF A NAVIGATIONAL WATCH ON VESSELS OF LESS THAN 500 GT LIMITED TO NEAR-COASTAL WATERS 1. GENERAL. This
Enclosure (1) to NVIC 13-14 DISCUSSION OF QUALIFICATION REQUIREMENTS FOR MASTER AND OFFICER IN CHARGE OF A NAVIGATIONAL WATCH ON VESSELS OF LESS THAN 500 GT LIMITED TO NEAR-COASTAL WATERS 1. GENERAL. This
CMI QUESTIONNAIRE ON UNMANNED SHIPS
 HRVATSKO DRUŠTVO ZA POMORSKO PRAVO ASSOCIATION CROATE DE DROIT MARITIME CROATIAN MARITIME LAW ASSOCIATION Member of Comité Maritime International University of Rijeka Faculty of Maritime Studies Studentska
HRVATSKO DRUŠTVO ZA POMORSKO PRAVO ASSOCIATION CROATE DE DROIT MARITIME CROATIAN MARITIME LAW ASSOCIATION Member of Comité Maritime International University of Rijeka Faculty of Maritime Studies Studentska
Naval Postgraduate School, Operational Oceanography and Meteorology. Since inputs from UDAS are continuously used in projects at the Naval
 How Accurate are UDAS True Winds? Charles L Williams, LT USN September 5, 2006 Naval Postgraduate School, Operational Oceanography and Meteorology Abstract Since inputs from UDAS are continuously used
How Accurate are UDAS True Winds? Charles L Williams, LT USN September 5, 2006 Naval Postgraduate School, Operational Oceanography and Meteorology Abstract Since inputs from UDAS are continuously used
Uninformed search methods
 Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework 1 Access through the course web page http://www.cs.pitt.edu/~milos/courses/cs2710/ Two
Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework 1 Access through the course web page http://www.cs.pitt.edu/~milos/courses/cs2710/ Two
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION Task and Rules Document
 NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
Navigators Behavior in Traffic Separation Schemes
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 9 Number 1 March 2015 DOI: 10.12716/1001.09.01.15 Navigators Behavior in Traffic Separation
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 9 Number 1 March 2015 DOI: 10.12716/1001.09.01.15 Navigators Behavior in Traffic Separation
Flight Software Overview
 Solar Probe Plus A NASA Mission to Touch the Sun Flight Software Overview Christopher Krupiarz Christopher.Krupiarz@jhuapl.edu Overarching Science Objective To determine the structure and dynamics of the
Solar Probe Plus A NASA Mission to Touch the Sun Flight Software Overview Christopher Krupiarz Christopher.Krupiarz@jhuapl.edu Overarching Science Objective To determine the structure and dynamics of the
LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS
 LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS GARY B. PARKER and INGO CYLIAX Department of Computer Science, Indiana University, Bloomington, IN 47405 gaparker@cs.indiana.edu, cyliax@cs.indiana.edu
LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS GARY B. PARKER and INGO CYLIAX Department of Computer Science, Indiana University, Bloomington, IN 47405 gaparker@cs.indiana.edu, cyliax@cs.indiana.edu
Collision in restricted visibility
 August 2013 Collision in restricted visibility It was early morning and both vessels were sailing in a busy traffic separation scheme in South East Asia. The sea was calm but there were some rain showers
August 2013 Collision in restricted visibility It was early morning and both vessels were sailing in a busy traffic separation scheme in South East Asia. The sea was calm but there were some rain showers
Manoeuvring Simulation of Multiple Underwater Vehicles in Close Proximity
 Manoeuvring Simulation of Multiple Underwater Vehicles in Close Proximity Dr Adam Mawby SEA (Group) Ltd Beckington Castle PO Box 800 Frome BA11 6TB Tel. +44 (0) 1373 852236 adam.mawby@sea.co.uk Paul Wilson
Manoeuvring Simulation of Multiple Underwater Vehicles in Close Proximity Dr Adam Mawby SEA (Group) Ltd Beckington Castle PO Box 800 Frome BA11 6TB Tel. +44 (0) 1373 852236 adam.mawby@sea.co.uk Paul Wilson
AIS data analysis for vessel behavior during strong currents and during encounters in the Botlek area in the Port of Rotterdam
 International Workshop on Next Generation Nautical Traffic Models 2013, Delft, The Netherlands AIS data analysis for vessel behavior during strong currents and during encounters in the Botlek area in the
International Workshop on Next Generation Nautical Traffic Models 2013, Delft, The Netherlands AIS data analysis for vessel behavior during strong currents and during encounters in the Botlek area in the
7 MAN OVERBOARD PROCEDURES
 7 MAN OVERBOARD PROCEDURES Overview... 142 Primary Actions... 143 Shout... 143 Throw... 143 Point... 143 Secondary Actions... 144 Initiate Turn... 144 Methods for Turning... 145 Williamson Turn... 145
7 MAN OVERBOARD PROCEDURES Overview... 142 Primary Actions... 143 Shout... 143 Throw... 143 Point... 143 Secondary Actions... 144 Initiate Turn... 144 Methods for Turning... 145 Williamson Turn... 145
/435 Artificial Intelligence Fall 2015
 Final Exam 600.335/435 Artificial Intelligence Fall 2015 Name: Section (335/435): Instructions Please be sure to write both your name and section in the space above! Some questions will be exclusive to
Final Exam 600.335/435 Artificial Intelligence Fall 2015 Name: Section (335/435): Instructions Please be sure to write both your name and section in the space above! Some questions will be exclusive to
COLREGs-Compliant Path Planning for Autonomous Surface Vehicles: A Multiobjective Optimization Approach
 COLREGs-Compliant Path Planning for Autonomous Surface Vehicles: A Multiobjective Optimization Approach Hu, L., Naeem, W., Rajabally, E., Watson, G., Mills, T., Bhuiyan, Z., & Salter, I. (20). COLREGs-Compliant
COLREGs-Compliant Path Planning for Autonomous Surface Vehicles: A Multiobjective Optimization Approach Hu, L., Naeem, W., Rajabally, E., Watson, G., Mills, T., Bhuiyan, Z., & Salter, I. (20). COLREGs-Compliant
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
1.1 The size of the search space Modeling the problem Change over time Constraints... 21
 Introduction : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1 I What Are the Ages of My Three Sons? : : : : : : : : : : : : : : : : : 9 1 Why Are Some Problems Dicult to Solve? : : :
Introduction : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1 I What Are the Ages of My Three Sons? : : : : : : : : : : : : : : : : : 9 1 Why Are Some Problems Dicult to Solve? : : :
OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING
 OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING Erich Ramschak Dr. Jürgen Holzinger Erik Bogner AVL List GmbH erich.ramschak@avl.com ConCar-Forum Berlin 5.-6.July 2017
OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING Erich Ramschak Dr. Jürgen Holzinger Erik Bogner AVL List GmbH erich.ramschak@avl.com ConCar-Forum Berlin 5.-6.July 2017
Evaluation of Unstructured WAVEWATCH III for Nearshore Application
 Evaluation of Unstructured WAVEWATCH III for Nearshore Application Jane McKee Smith, Tyler Hesser, Mary Anderson Bryant USACE Research and Development Center, Coastal and Hydraulics Lab Aron Roland BGS
Evaluation of Unstructured WAVEWATCH III for Nearshore Application Jane McKee Smith, Tyler Hesser, Mary Anderson Bryant USACE Research and Development Center, Coastal and Hydraulics Lab Aron Roland BGS