Evaluating chaff fire pattern algorithms in a simulation environment. JP du Plessis Institute for Maritime Technology South Africa
|
|
|
- Antony Armstrong
- 6 years ago
- Views:
Transcription

1 Evaluating chaff fire pattern algorithms in a simulation environment JP du Plessis (jdp@imt.co.za) Institute for Maritime Technology South Africa
2 Overview What is seduction chaff? Chaff solution algorithm SADM External C2 Batched parameter setup Batch results DSADM cluster setup Hardware performance Cluster start-up
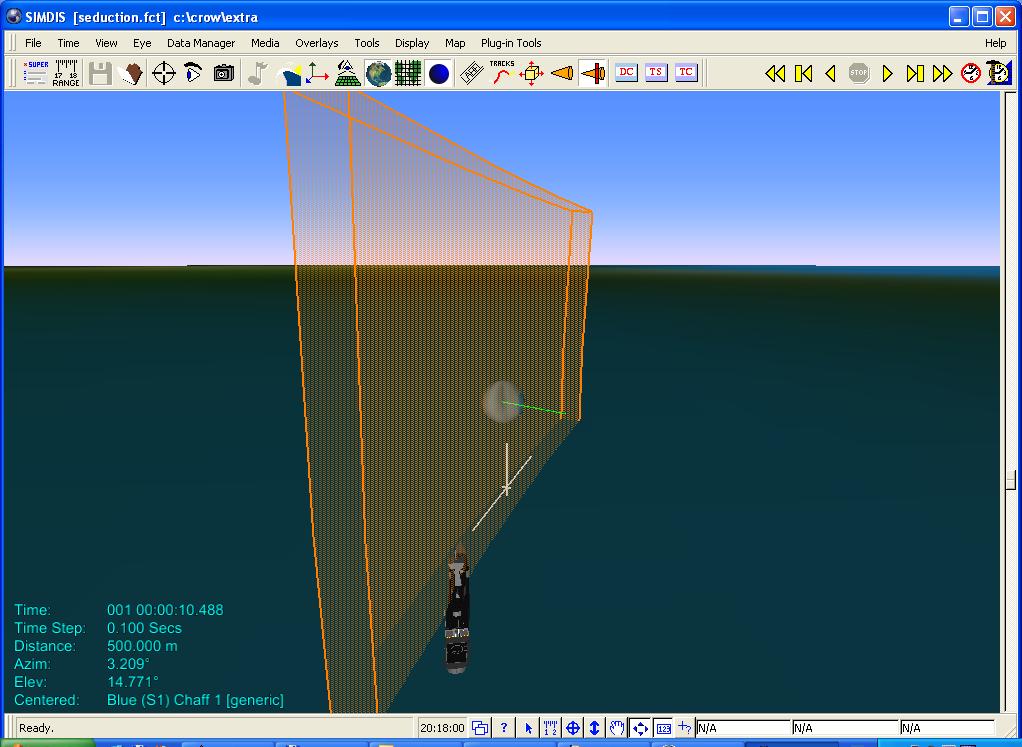
3 What is seduction chaff? A round, releasing fine pieces of foil to reflect radar waves, fired some distance from a ship. Chaff aims to present to a missile seeker a more valid target than the ship itself. Seduction chaff is used to defend against an incoming missile threat already locked onto own ship. Wind relative to ship takes the chaff through the missile's range gate, taking the gate with it. In successful cases, the threat missile's path is altered such that it misses the ship by some miss distance.
4
5
6 Chaff solution algorithm A chaff solution algorithm is part of an ship EW system that calculates an optimised chaff solution for the current situation. Seduction chaff requires a detailed algorithm or lookup table to calculate a solution which is not configurable with parameters alone. In a missile threat situation, this algorithm is automatically used to find a solution based on the current scenario.
7 Chaff solution algorithm (2) Main input variables: Ship velocity Wind velocity Threat bearing Threat type Main output variables: Number of chaff rounds For each round: Launcher Azimuth Launcher Elevation Time to fire Fuse time
8 SADM external ship C2 model SADM: Ship Air Defence Model BAE Systems A ship C2 model can be configured by the SADM user to represent unique characteristics of the relevant ship Command and Control system. A great feature of the external C2 model is it gives the SADM user the ability to integrate seduction chaff deployment algorithms. source code - code as compiled for own naval vessel closed format -.dll from chaff system supplier
9 SADM external C2 model (2) The user has some freedom to narrow down the C2 model to only cater for ship systems of interest You do not need to develop a full blown ship C2 model with all the bell and whistles. It all depends on what needs to be achieved.

10 Algorithm simulation result
11 We now know what the typical result is for one scenario. One would naturally want to know: What if the wind velocity was different? What if the threat missile came from another direction? Where does my chaff algorithm fail?
12 Batched parameter simulation runs Do multiple simulation runs varying one variable at a time between subsequent runs. Parse the log files for each trial run to gather needed information from SADM results (file formats not documented and changed between releases). Dump data into.csv file for easy import into preconfigured spreadsheet. Analyse the combined results.
13 Batch parameter configuration Algorithm need to be tested with a range of different input parameters and the results analysed. Parameters varied: 4 wind velocities 18 wind directions (0 to 340 in 20 steps) 18 threat bearings (0 to 340 in 20 steps) Number of scenario variations: Number of simulation runs (10 Monte-Carlo runs per scenario): 4 x 18 x 18 = * 10 = runs The Ship Air Defence Model have this process automated and the results can be analysed directly in the model or the output data can be analysed directly.
14 Threat angle Wind direction
15 Algorithm 1
16 Miss distance plot - 1 Launcher, 5 chaff rounds Ship heading = 000 deg, speed = 0 m/s ASM angle relative to ship bow, direction from [deg] Wind 30m/s ( 60kts) Wind 20m/s ( 40kts) Wind 10m/s ( 20kts) Wind 0 m/s (0 kts) Size reference [m] True wind angle relative to ship bow, direction from [deg]
17 Algorithm 2
18 Miss distance plot - 2 Launchers, 5 chaff rounds each Ship heading = 000 deg, speed = 0 m/s ASM angle relative to ship bow, direction from [deg] Wind 30m/s ( 60kts) Wind 20m/s ( 40kts) Wind 10m/s ( 20kts) Wind 0 m/s (0 kts) Size reference [m] True wind angle relative to ship bow, direction from [deg]
19 Algorithm 3
20 Miss distance plot - 4 Launchers, 5 chaff rounds each Ship heading = 000 deg, speed = 0 m/s ASM angle relative to ship bow, direction from [deg] Wind 30m/s ( 60kts) Wind 20m/s ( 40kts) Wind 10m/s ( 20kts) Wind 0 m/s (0 kts) Size reference [m] True wind angle relative to ship bow, direction from [deg]
21 What happens when the missile seeker range gate depth is reduced to be more representative of modern missile seekers?
22 Miss distance plot - 4 Launchers, 5 chaff rounds each, Short range gate Ship heading = 000 deg, speed = 0 m/s ASM angle relative to ship bow, direction from [deg] Wind 30m/s ( 60kts) Wind 20m/s ( 40kts) Wind 10m/s ( 20kts) Wind 0 m/s (0 kts) Size reference [m] True wind angle relative to ship bow, direction from [deg]
23 The Remedy A well designed algorithm will optimally calculate a chaff pattern. Maximize amount of chaff inside missile range gate. Ensure maximum missile miss distance from ship in as many situations as possible. Every time check results by repeating the batch process.
24 DSADM: Distributed SADM The process above on one machine can take many days to simulate (single thread application using one CPU core). Sometimes between the external C2 and SADM something goes wrong and then the whole batch run needs to be restarted (this is vastly improving with newer releases). By using DSADM to spread the load to a cluster of machines significantly reduces the simulation time Adding virtual machines to the mix gives another order of magnitude improvement as will be shown next.
25 DSADM cluster setup with an external ship C2 Only one SADM process and external C2 set, managed by DSADM service, can run on a machine. To take advantage of modern multi-core CPU's, virtual machines are the logical solution. Typically one virtual machine for each CPU thread seems to be optimal for CPU utilisation and robustness. ExternalC2.exe (and dll's connecting to it) is only in one place from which all nodes run it automatically. Thus only one place to update it.


26 DSADM cluster setup with c2extern
27 DSADM cluster hardware performance Core i7 machines found to perform extremely poorly when using Windows (XP Pro 64bit) as operating system hosting the Virtualbox virtual machines. Network traffic between DSADM controller and nodes is quite low, although the controller does run into issues when its machine is stressed by also running some virtual machine nodes on it.
28 DSADM Cluster hardware performance

29 DSADM cluster hardware performance (2)
30 DSAM cluster startup with external ship C2 Each DSADM node mounts the shared directory containing c2extern.exe upon start-up (.bat file used) In each DSADM node another.bat file in the locally mounted shared directory starts up c2extern.exe and restarts it each time it closes. Machine sharing directory with c2extern.exe and dlls use Ubuntu as operating system (Windows has issues with number of connections)
31 mount_c2_dir.bat run by node after off if exist (z:\nul) net use z: /delete echo waiting for mapped network drive (z:) to become available... :start net use Z: \\ \shared /persistent:no dummy_pwd /user:dummy ping -n > nul if not exist z:\nul goto start echo z:\ now available, can move path there and run batch starting c2_extern.exe z: start_c2.bat
32 start_c2.bat in c2extern.exe off if not exist z:\c2_log\nul mkdir z:\c2_log :start ping -n > nul echo echo starting external C2 and restart when done c2_extern.exe /log goto start
33 In essence three simulation clusters function together in some chaff simulations On each node of the simulation cluster the following runs: SADM simulation environment Ship external C2 model Ships with effectors and sensors, threat missiles, signal propagation and the environment Includes specific features of SAN Frigate Proprietary chaff algorithm dll e.g. RheinMetall MASS algorithm Wibu cluster license manager
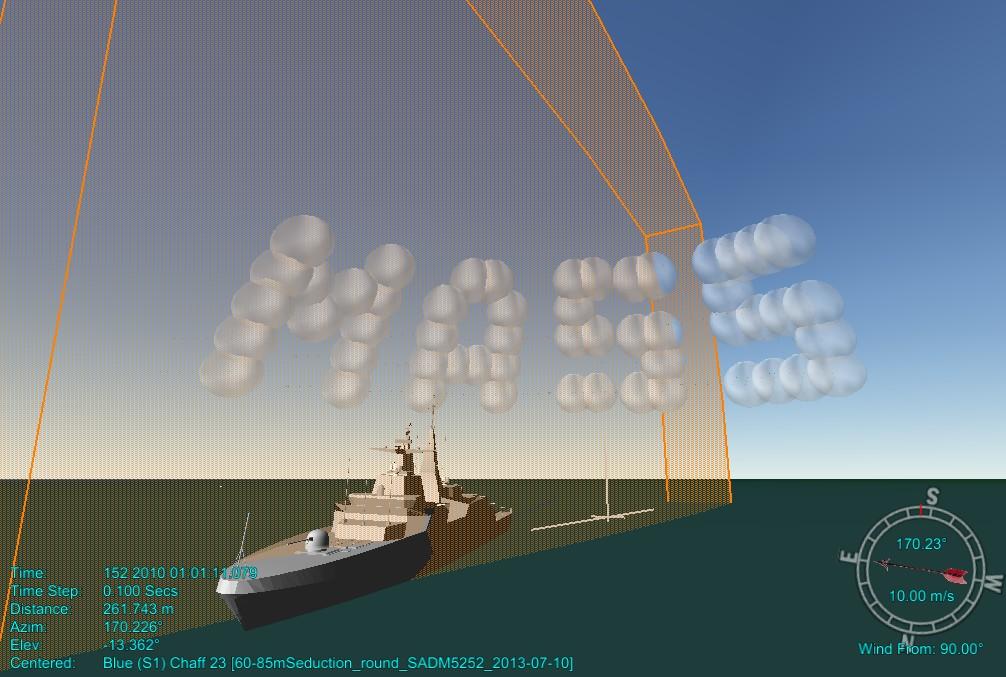
34 Chaff sky writing! Since SADM 5.2 the number of chaff rounds have been greatly improved and launchers became trainable in elevation. The following message was proof sent to the developers of the RheinMetall MASS chaff system that SADM finally had the ability to simulate their chaff patterns.
35

36 Questions?
SoundCast Design Intro
 SoundCast Design Intro Basic Design SoundCast and Daysim 3 Land use attributes Households & Individuals SoundCast DaySim Travel demand simulator Trips and Households, Excel Summary Sheets, EMME network
SoundCast Design Intro Basic Design SoundCast and Daysim 3 Land use attributes Households & Individuals SoundCast DaySim Travel demand simulator Trips and Households, Excel Summary Sheets, EMME network
Virtual Breadboarding. John Vangelov Ford Motor Company
 Virtual Breadboarding John Vangelov Ford Motor Company What is Virtual Breadboarding? Uses Vector s CANoe product, to simulate MATLAB Simulink models in a simulated or real vehicle environment. Allows
Virtual Breadboarding John Vangelov Ford Motor Company What is Virtual Breadboarding? Uses Vector s CANoe product, to simulate MATLAB Simulink models in a simulated or real vehicle environment. Allows
Using MATLAB with CANoe
 Version 2.0 2017-03-09 Application Note AN-IND-1-007 Author Restrictions Abstract Vector Informatik GmbH Public Document This application note describes the usage of MATLAB /Simulink combined with CANoe.
Version 2.0 2017-03-09 Application Note AN-IND-1-007 Author Restrictions Abstract Vector Informatik GmbH Public Document This application note describes the usage of MATLAB /Simulink combined with CANoe.
An Assessment of FlowRound for Signalised Roundabout Design.
 An Assessment of FlowRound for Signalised Roundabout Design. 1.0 Introduction This critique is based upon recent use by White Young Green signal engineering staff. The comments made do not cover all of
An Assessment of FlowRound for Signalised Roundabout Design. 1.0 Introduction This critique is based upon recent use by White Young Green signal engineering staff. The comments made do not cover all of
Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling
 Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
New Highly Productive Phased Array Ultrasonic Testing Machine for Aluminium Plates for Aircraft Applications
 19 th World Conference on Non-Destructive Testing 2016 New Highly Productive Phased Array Ultrasonic Testing Machine for Aluminium Plates for Aircraft Applications Christoph HENKEL 1, Markus SPERL 1, Walter
19 th World Conference on Non-Destructive Testing 2016 New Highly Productive Phased Array Ultrasonic Testing Machine for Aluminium Plates for Aircraft Applications Christoph HENKEL 1, Markus SPERL 1, Walter
Overview. 2 Module 13: Advanced Data Processing
 2 Module 13: Advanced Data Processing Overview This section of the course covers advanced data processing when profiling. We will discuss the removal of the fairly gross effects of ship heave and talk
2 Module 13: Advanced Data Processing Overview This section of the course covers advanced data processing when profiling. We will discuss the removal of the fairly gross effects of ship heave and talk
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004
 Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
How to Optimize the Disposal System With Staggered Analysis Using BLOWDOWN Technology. Jump Start Guide
 How to Optimize the Disposal System With Staggered Analysis Using BLOWDOWN Technology Jump Start Guide Problem Statement In this guide, you will be introduced to the tools in BLOWDOWN that can be used
How to Optimize the Disposal System With Staggered Analysis Using BLOWDOWN Technology Jump Start Guide Problem Statement In this guide, you will be introduced to the tools in BLOWDOWN that can be used
Tokyo: Simulating Hyperpath-Based Vehicle Navigations and its Impact on Travel Time Reliability
 CHAPTER 92 Tokyo: Simulating Hyperpath-Based Vehicle Navigations and its Impact on Travel Time Reliability Daisuke Fukuda, Jiangshan Ma, Kaoru Yamada and Norihito Shinkai 92.1 Introduction Most standard
CHAPTER 92 Tokyo: Simulating Hyperpath-Based Vehicle Navigations and its Impact on Travel Time Reliability Daisuke Fukuda, Jiangshan Ma, Kaoru Yamada and Norihito Shinkai 92.1 Introduction Most standard
Workshop 1: Bubbly Flow in a Rectangular Bubble Column. Multiphase Flow Modeling In ANSYS CFX Release ANSYS, Inc. WS1-1 Release 14.
 Workshop 1: Bubbly Flow in a Rectangular Bubble Column 14. 5 Release Multiphase Flow Modeling In ANSYS CFX 2013 ANSYS, Inc. WS1-1 Release 14.5 Introduction This workshop models the dispersion of air bubbles
Workshop 1: Bubbly Flow in a Rectangular Bubble Column 14. 5 Release Multiphase Flow Modeling In ANSYS CFX 2013 ANSYS, Inc. WS1-1 Release 14.5 Introduction This workshop models the dispersion of air bubbles
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs
 Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Reducing Hydraulic Capacity Flood Risk through Monitoring and Autonomous Local Control. Prof Pete Skipworth, EMS
 Reducing Hydraulic Capacity Flood Risk through Monitoring and Autonomous Local Control Prof Pete Skipworth, EMS Types of Flooding Inundation flooding e.g. a river bursts its banks Hydraulic incapacity
Reducing Hydraulic Capacity Flood Risk through Monitoring and Autonomous Local Control Prof Pete Skipworth, EMS Types of Flooding Inundation flooding e.g. a river bursts its banks Hydraulic incapacity
In ocean evaluation of low frequency active sonar systems
 Acoustics 8 Paris In ocean evaluation of low frequency active sonar systems K.T. Hjelmervik and G.H. Sandsmark FFI, Postboks 5, 39 Horten, Norway kth@ffi.no 2839 Acoustics 8 Paris Sonar performance measurements
Acoustics 8 Paris In ocean evaluation of low frequency active sonar systems K.T. Hjelmervik and G.H. Sandsmark FFI, Postboks 5, 39 Horten, Norway kth@ffi.no 2839 Acoustics 8 Paris Sonar performance measurements
Modelling Today for the Future. Advanced Modelling Control Techniques
 CwMAG 1 st Autumn Conference 2012 Modelling Today for the Future Advanced Modelling Control Techniques What are advanced modelling controls? Why do we have them? How can we use them? What are the differences
CwMAG 1 st Autumn Conference 2012 Modelling Today for the Future Advanced Modelling Control Techniques What are advanced modelling controls? Why do we have them? How can we use them? What are the differences
Automating Injection Molding Simulation using Autonomous Optimization
 Automating Injection Molding Simulation using Autonomous Optimization Matt Proske, Rodrigo Gutierrez, & Gabriel Geyne SIGMASOFT Virtual Molding Autonomous optimization is coupled to injection molding simulation
Automating Injection Molding Simulation using Autonomous Optimization Matt Proske, Rodrigo Gutierrez, & Gabriel Geyne SIGMASOFT Virtual Molding Autonomous optimization is coupled to injection molding simulation
Ingersoll Rand. X-Series System Automation
 Ingersoll Rand -Series System Automation Energy Savings on Demand! Ingersoll Rand As much as 20% to 60% of the energy used to operate compressed air systems is wasted. This is primarily due to operating
Ingersoll Rand -Series System Automation Energy Savings on Demand! Ingersoll Rand As much as 20% to 60% of the energy used to operate compressed air systems is wasted. This is primarily due to operating
Autonomous blimp control with reinforcement learning
 University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2009 Autonomous blimp control with reinforcement learning Yiwei
University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2009 Autonomous blimp control with reinforcement learning Yiwei
Volume A Question No : 1 You can monitor your Steelhead appliance disk performance using which reports? (Select 2)
") Volume A~D: 342 Questions Volume A Question No : 1 You can monitor your Steelhead appliance disk performance using which reports? (Select 2) A. Data Store Cost B. Data Store Performance C. Disk Load D.
Volume A~D: 342 Questions Volume A Question No : 1 You can monitor your Steelhead appliance disk performance using which reports? (Select 2) A. Data Store Cost B. Data Store Performance C. Disk Load D.
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES
 ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
for Naval Aircraft Operations
 Seakeeping Assessment of Large Seakeeping Assessment of Large Trimaran Trimaran for Naval Aircraft Operations for Naval Aircraft Operations Presented by Mr. Boyden Williams, Mr. Lars Henriksen (Viking
Seakeeping Assessment of Large Seakeeping Assessment of Large Trimaran Trimaran for Naval Aircraft Operations for Naval Aircraft Operations Presented by Mr. Boyden Williams, Mr. Lars Henriksen (Viking
DYNAMIC POSITIONING CONFERENCE. October 13-14, Arctic. DP In Ice Conditions
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 29 Arctic DP In Ice Conditions Nils Albert Jenssen Kongsberg Maritime, Kongsberg Norway Suman Muddesitti Shell International Exploration
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 29 Arctic DP In Ice Conditions Nils Albert Jenssen Kongsberg Maritime, Kongsberg Norway Suman Muddesitti Shell International Exploration
SQL LiteSpeed 3.0 Installation Guide
 SQL LiteSpeed 3.0 Installation Guide Revised January 27, 2004 Written by: Jeremy Kadlec Edgewood Solutions www.edgewoodsolutions.com 888.788.2444 2 Introduction This guide outlines the SQL LiteSpeed 3.0
SQL LiteSpeed 3.0 Installation Guide Revised January 27, 2004 Written by: Jeremy Kadlec Edgewood Solutions www.edgewoodsolutions.com 888.788.2444 2 Introduction This guide outlines the SQL LiteSpeed 3.0
A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL
 A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL L Boddy and T Clarke, Austal Ships, Australia SUMMARY CFD analysis has been conducted on a 100m catamaran hull
A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL L Boddy and T Clarke, Austal Ships, Australia SUMMARY CFD analysis has been conducted on a 100m catamaran hull
ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering. Mini-project 3 Tennis ball launcher
 Mini-project 3 Tennis ball launcher Mini-Project 3 requires you to use MATLAB to model the trajectory of a tennis ball being shot from a tennis ball launcher to a player. The tennis ball trajectory model
Mini-project 3 Tennis ball launcher Mini-Project 3 requires you to use MATLAB to model the trajectory of a tennis ball being shot from a tennis ball launcher to a player. The tennis ball trajectory model
Race Screen: Figure 2: Race Screen. Figure 3: Race Screen with Top Bulb Lock
 Eliminator Competition Stand Alone Mode - Instruction Manual Main Menu: After startup, the Eliminator Competition will enter the Main Menu. Press the right/left arrow buttons to move through the menu.
Eliminator Competition Stand Alone Mode - Instruction Manual Main Menu: After startup, the Eliminator Competition will enter the Main Menu. Press the right/left arrow buttons to move through the menu.
Built-in Purge Control Functions
 Built-in Purge Control Functions Why clean a sensor? As the velocity sensor was calibrated clean, operating it clean also preserves the best calibration. Any build up of material on a thermal sensor tends
Built-in Purge Control Functions Why clean a sensor? As the velocity sensor was calibrated clean, operating it clean also preserves the best calibration. Any build up of material on a thermal sensor tends
PIG MOTION AND DYNAMICS IN COMPLEX GAS NETWORKS. Dr Aidan O Donoghue, Pipeline Research Limited, Glasgow
 PIG MOTION AND DYNAMICS IN COMPLEX GAS NETWORKS Dr Aidan O Donoghue, Pipeline Research Limited, Glasgow A model to examine pigging and inspection of gas networks with multiple pipelines, connections and
PIG MOTION AND DYNAMICS IN COMPLEX GAS NETWORKS Dr Aidan O Donoghue, Pipeline Research Limited, Glasgow A model to examine pigging and inspection of gas networks with multiple pipelines, connections and
COLREGS Based Collision Avoidance of Unmanned Surface Vehicles
 COLREGS Based Collision Avoidance of Unmanned Surface Vehicles Aug 2nd, 2017 Michael R. Benjamin Kyle Woerner, Michael Novitzky, John Leonard MIT Dept. of Mechanical Engineering Computer Science and Artificial
COLREGS Based Collision Avoidance of Unmanned Surface Vehicles Aug 2nd, 2017 Michael R. Benjamin Kyle Woerner, Michael Novitzky, John Leonard MIT Dept. of Mechanical Engineering Computer Science and Artificial
Yokogawa Systems and PCI Training
 Yokogawa Systems and PCI Training 09 th December 2014 Nico Marneweck 082 883 2652 Kallie Bodenstein 083 226 2787 Marco Coccioni 072 409 5779-1 - Introduction Training customised for the South Africa Industrial
Yokogawa Systems and PCI Training 09 th December 2014 Nico Marneweck 082 883 2652 Kallie Bodenstein 083 226 2787 Marco Coccioni 072 409 5779-1 - Introduction Training customised for the South Africa Industrial
Typical Wayside Reader System Quotation
 Typical Wayside Reader System Quotation Please note that components can be added or deleted to the quotation to meet the customer s individual requirements. This is in response to your request for a quotation
Typical Wayside Reader System Quotation Please note that components can be added or deleted to the quotation to meet the customer s individual requirements. This is in response to your request for a quotation
Surface Tracking Feature
 TELEDYNE RD INSTRUM ENTS A Teledyne Technologies Company Application Note FSA-022 (June 2008) Surface Tracking Feature 1 Introduction The following Application Note serves as a guide of how to use the
TELEDYNE RD INSTRUM ENTS A Teledyne Technologies Company Application Note FSA-022 (June 2008) Surface Tracking Feature 1 Introduction The following Application Note serves as a guide of how to use the
DP Station Keeping Event Bulletin
 DP Station Keeping Event Bulletin IMCA DP Station Keeping Event Bulletin 04/17 October 2017 The following event trees have been compiled from recent reports received by IMCA. The originators granted IMCA
DP Station Keeping Event Bulletin IMCA DP Station Keeping Event Bulletin 04/17 October 2017 The following event trees have been compiled from recent reports received by IMCA. The originators granted IMCA
Tutorial for the. Total Vertical Uncertainty Analysis Tool in NaviModel3
 Tutorial for the Total Vertical Uncertainty Analysis Tool in NaviModel3 May, 2011 1. Introduction The Total Vertical Uncertainty Analysis Tool in NaviModel3 has been designed to facilitate a determination
Tutorial for the Total Vertical Uncertainty Analysis Tool in NaviModel3 May, 2011 1. Introduction The Total Vertical Uncertainty Analysis Tool in NaviModel3 has been designed to facilitate a determination
BHATNAGAR. Reducing Delay in V2V-AEB System by Optimizing Messages in the System
 Reducing Delay in V2V-AEB System by Optimizing Messages in the System Shalabh Bhatanagar Stanley Chien Yaobin Chen TASI, IUPUI, Indianapolis USA Paper Number: 17-0330 ABSTRACT In V2V-AEB (Vehicle to Vehicle
Reducing Delay in V2V-AEB System by Optimizing Messages in the System Shalabh Bhatanagar Stanley Chien Yaobin Chen TASI, IUPUI, Indianapolis USA Paper Number: 17-0330 ABSTRACT In V2V-AEB (Vehicle to Vehicle
On the design and control of complex tunnel ventilation systems applying the HIL tunnel simulator
 On the design and control of complex tunnel ventilation systems applying the HIL tunnel I. R. Riess and P. Altenburger HBI Haerter Ltd Consulting Engineers, Switzerland P. Sahlin Equa Simulation AB, Sweden
On the design and control of complex tunnel ventilation systems applying the HIL tunnel I. R. Riess and P. Altenburger HBI Haerter Ltd Consulting Engineers, Switzerland P. Sahlin Equa Simulation AB, Sweden
BUYER S GUIDE AQUAlogger 530WTD
 OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
Fatigue Analysis of a LUG Assembly
 LESSON 9 Fatigue Analysis of a LUG Assembly Objectives: Use all three methods of Fatigue life estimation to design the lug assembly. Use the total life method to estimate the fatigue life of the weld.
LESSON 9 Fatigue Analysis of a LUG Assembly Objectives: Use all three methods of Fatigue life estimation to design the lug assembly. Use the total life method to estimate the fatigue life of the weld.
itexamdump 최고이자최신인 IT 인증시험덤프 일년무료업데이트서비스제공
 itexamdump 최고이자최신인 IT 인증시험덤프 http://www.itexamdump.com 일년무료업데이트서비스제공 Exam : 199-01 Title : Riverbed Certified Solutions Professional Vendor : Riverbed Version : DEMO 1 / 4 Get Latest & Valid 199-01 Exam's
itexamdump 최고이자최신인 IT 인증시험덤프 http://www.itexamdump.com 일년무료업데이트서비스제공 Exam : 199-01 Title : Riverbed Certified Solutions Professional Vendor : Riverbed Version : DEMO 1 / 4 Get Latest & Valid 199-01 Exam's
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
AGW SYSTEMS. Blue Clock W38X
 AGW SYSTEMS Blue Clock W38X Contents table BLUECLOCKS...3 THE EVOLUTION...4 WHAT S NEW!...5 HARDWARE...6 SOFTWARE...7 MULTI COMPANY...8 INSTANTLY...9 EVEN MORE!...10 WHAT S INSIDE HOW DOES IT WORK...11...12
AGW SYSTEMS Blue Clock W38X Contents table BLUECLOCKS...3 THE EVOLUTION...4 WHAT S NEW!...5 HARDWARE...6 SOFTWARE...7 MULTI COMPANY...8 INSTANTLY...9 EVEN MORE!...10 WHAT S INSIDE HOW DOES IT WORK...11...12
Modeling of Hydraulic Hose Paths
 Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 9-2002 Modeling of Hydraulic Hose Paths Kurt A. Chipperfield Iowa State University Judy M. Vance Iowa State
Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 9-2002 Modeling of Hydraulic Hose Paths Kurt A. Chipperfield Iowa State University Judy M. Vance Iowa State
Rules of Soccer Simulation League 2D
 Rules of Soccer Simulation League 2D (RoboCup2016 Leipzig, Germany) This document contains the rules for the RoboCup2016 Soccer Simulation League 2D competition in Leipzig, Germany. 1. Soccer Simulator
Rules of Soccer Simulation League 2D (RoboCup2016 Leipzig, Germany) This document contains the rules for the RoboCup2016 Soccer Simulation League 2D competition in Leipzig, Germany. 1. Soccer Simulator
How to Do Flight Testing for TARC. Trip Barber NAR TARC Manager
 How to Do Flight Testing for TARC Trip Barber NAR TARC Manager The TARC Cycle Learn the rules and basic rocketry Design and fly your rocket on the computer Build your rocket to your design with real hardware
How to Do Flight Testing for TARC Trip Barber NAR TARC Manager The TARC Cycle Learn the rules and basic rocketry Design and fly your rocket on the computer Build your rocket to your design with real hardware
Holistic Atmosphere Management System (HAMS)
") Holistic Atmosphere Management System (HAMS) Outline Existing atmosphere control (Manual) Future atmosphere control (HAMS) Factors to consider Available technology Analox Atmosphere analyser ACI Electrolyser
Holistic Atmosphere Management System (HAMS) Outline Existing atmosphere control (Manual) Future atmosphere control (HAMS) Factors to consider Available technology Analox Atmosphere analyser ACI Electrolyser
A Wind Profiling Platform for Offshore Wind Measurements and Assessment. Presenter: Mark Blaseckie AXYS Technologies Inc.
 A Wind Profiling Platform for Offshore Wind Measurements and Assessment Presenter: Mark Blaseckie AXYS Technologies Inc. Any Sensor, Any Telemetry, Any Environment Founded in 1974 Part of the AXYS Group
A Wind Profiling Platform for Offshore Wind Measurements and Assessment Presenter: Mark Blaseckie AXYS Technologies Inc. Any Sensor, Any Telemetry, Any Environment Founded in 1974 Part of the AXYS Group
MIKE Release General product news for Marine software products, tools & features. Nov 2018
 MIKE Release 2019 General product news for Marine software products, tools & features Nov 2018 DHI 2012 MIKE 3 Wave FM New advanced phase-resolving 3D wave modelling product A MIKE 3 FM Wave model - why?
MIKE Release 2019 General product news for Marine software products, tools & features Nov 2018 DHI 2012 MIKE 3 Wave FM New advanced phase-resolving 3D wave modelling product A MIKE 3 FM Wave model - why?
Wärtsilä ELAC VE 5900
 Wärtsilä ELAC VE 5900 Naval echo sounder system for surface vessels The high-end naval echo sounder system Wärtsilä ELAC VE 5900 is especially designed to meet the requirements of modern surface combatant.
Wärtsilä ELAC VE 5900 Naval echo sounder system for surface vessels The high-end naval echo sounder system Wärtsilä ELAC VE 5900 is especially designed to meet the requirements of modern surface combatant.
High usability and simple configuration or extensive additional functions the choice between Airlock Login or Airlock IAM is yours!
 High usability and simple configuration or extensive additional functions the choice between Airlock Login or Airlock IAM is yours! Airlock Login Airlock IAM When combined with Airlock WAF, Airlock Login
High usability and simple configuration or extensive additional functions the choice between Airlock Login or Airlock IAM is yours! Airlock Login Airlock IAM When combined with Airlock WAF, Airlock Login
Autodesk Moldflow Communicator Process settings
 Autodesk Moldflow Communicator 212 Process settings Revision 1, 3 March 211. Contents Chapter 1 Process settings....................................... 1 Profiles.................................................
Autodesk Moldflow Communicator 212 Process settings Revision 1, 3 March 211. Contents Chapter 1 Process settings....................................... 1 Profiles.................................................
KEM Scientific, Inc. Instruments for Science from Scientists
 KEM Scientific, Inc. Instruments for Science from Scientists J-KEM Scientific, Inc. 6970 Olive Blvd. St. Louis, MO 63130 (314) 863-5536 Fax (314) 863-6070 E-Mail: jkem911@jkem.com Precision Vacuum Controller,
KEM Scientific, Inc. Instruments for Science from Scientists J-KEM Scientific, Inc. 6970 Olive Blvd. St. Louis, MO 63130 (314) 863-5536 Fax (314) 863-6070 E-Mail: jkem911@jkem.com Precision Vacuum Controller,
DIVERLESS SUBSEA HOT TAPPING OF PRODUCTION PIPELINES
 DIVERLESS SUBSEA HOT TAPPING OF PRODUCTION PIPELINES Dale Calkins Senior Project Engineer, TD Williamson Inc Biography Dale Calkins joined TD Williamson Inc in November of 1999 after working as a consulting
DIVERLESS SUBSEA HOT TAPPING OF PRODUCTION PIPELINES Dale Calkins Senior Project Engineer, TD Williamson Inc Biography Dale Calkins joined TD Williamson Inc in November of 1999 after working as a consulting
ECDIS Familiarisation Training
 Chapter 4 ECDIS Familiarisation Training The convention related to the qualifications of seafarers responsible for ship operation is STCW (International Convention on Standards of Training, Certification
Chapter 4 ECDIS Familiarisation Training The convention related to the qualifications of seafarers responsible for ship operation is STCW (International Convention on Standards of Training, Certification
Measuring wind speed and direction
 A critical part of studying weather is measuring wind direction and speed. The Anemometer is actually two sensors mounted onto one arm, capable of measuring wind speed and wind direction. The wind caps
A critical part of studying weather is measuring wind direction and speed. The Anemometer is actually two sensors mounted onto one arm, capable of measuring wind speed and wind direction. The wind caps
Wickets Administrator
 Wickets Administrator Software For Managing Stored Value Wickets 01/08/2008 Product Details And Operating Instructions Overview This page describes each major function of Wickets Administrator in detail.
Wickets Administrator Software For Managing Stored Value Wickets 01/08/2008 Product Details And Operating Instructions Overview This page describes each major function of Wickets Administrator in detail.
AN31E Application Note
 Balancing Theory Aim of balancing How an unbalance evolves An unbalance exists when the principle mass axis of a rotating body, the so-called axis of inertia, does not coincide with the rotational axis.
Balancing Theory Aim of balancing How an unbalance evolves An unbalance exists when the principle mass axis of a rotating body, the so-called axis of inertia, does not coincide with the rotational axis.
H3 MilSim 25+ yrs of simulation
 H3 MilSim 25+ yrs of simulation Due to the long history of Harpoon, both paper and computer, it is appropriate to touch on the product s history and related commercial products. The emphasis of this presentation
H3 MilSim 25+ yrs of simulation Due to the long history of Harpoon, both paper and computer, it is appropriate to touch on the product s history and related commercial products. The emphasis of this presentation
SIDRA INTERSECTION 6.1 UPDATE HISTORY
 Akcelik & Associates Pty Ltd PO Box 1075G, Greythorn, Vic 3104 AUSTRALIA ABN 79 088 889 687 For all technical support, sales support and general enquiries: support.sidrasolutions.com SIDRA INTERSECTION
Akcelik & Associates Pty Ltd PO Box 1075G, Greythorn, Vic 3104 AUSTRALIA ABN 79 088 889 687 For all technical support, sales support and general enquiries: support.sidrasolutions.com SIDRA INTERSECTION
Configuring Bidirectional Forwarding Detection for BGP
 CHAPTER 7 Configuring Bidirectional Forwarding Detection for BGP This chapter describes how to configure Bidirectional Forwarding Detection (BFD) for BGP. This chapter includes the following sections:
CHAPTER 7 Configuring Bidirectional Forwarding Detection for BGP This chapter describes how to configure Bidirectional Forwarding Detection (BFD) for BGP. This chapter includes the following sections:
Advanced Pump Control for Irrigation Applications
 Advanced Pump Control for Irrigation Applications Paul Nistler VFD Applications Engineer And Julian Atchia Director of Research and Development SJE Rhombus 22650 County Hwy 6 Detroit Lakes MN 56502 Executive
Advanced Pump Control for Irrigation Applications Paul Nistler VFD Applications Engineer And Julian Atchia Director of Research and Development SJE Rhombus 22650 County Hwy 6 Detroit Lakes MN 56502 Executive
ME 8843-Advanced Mechatronics. Project Proposal-Automatic Bike Transmission
 ME 8843-Advanced Mechatronics Project Proposal-Automatic Bike Transmission 1/21/09 Razid Ahmad Brandon Borm Todd Sifleet Project Proposal: Our goal for the semester long project is to create and automatic
ME 8843-Advanced Mechatronics Project Proposal-Automatic Bike Transmission 1/21/09 Razid Ahmad Brandon Borm Todd Sifleet Project Proposal: Our goal for the semester long project is to create and automatic
intended velocity ( u k arm movements
 Fig. A Complete Brain-Machine Interface B Human Subjects Closed-Loop Simulator ensemble action potentials (n k ) ensemble action potentials (n k ) primary motor cortex simulated primary motor cortex neuroprosthetic
Fig. A Complete Brain-Machine Interface B Human Subjects Closed-Loop Simulator ensemble action potentials (n k ) ensemble action potentials (n k ) primary motor cortex simulated primary motor cortex neuroprosthetic
DeWiggler. Get your calibrations under control
 DeWiggler Get your calibrations under control DeWiggler Pro DeWiggler Pro comes aboard with a calibration professional. Calibrations are determined and set in real-time. When the calibrator leaves, Pro
DeWiggler Get your calibrations under control DeWiggler Pro DeWiggler Pro comes aboard with a calibration professional. Calibrations are determined and set in real-time. When the calibrator leaves, Pro
Importance of Wave Height Measurement in Wave Solder Process Control
 Importance of Wave Height Measurement in Wave Solder Process Control By: Patrick McWiggin, Technical Director, SolderStar Ltd It is still common place to simply capture temperature profile measurements
Importance of Wave Height Measurement in Wave Solder Process Control By: Patrick McWiggin, Technical Director, SolderStar Ltd It is still common place to simply capture temperature profile measurements
Survey Technical Support Notes October 2015
 Survey Technical Support Notes October 2015 SonarMite with Trimble Access Overview: Trimble Access software, when connected to a SonarMite will store water depths associated with field measurements. Equipment:
Survey Technical Support Notes October 2015 SonarMite with Trimble Access Overview: Trimble Access software, when connected to a SonarMite will store water depths associated with field measurements. Equipment:
Automatic Heading Control for Dynamic Positioning in Ice
 Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 DESIGN AND CONTROL SESSION II Automatic Heading Control for Dynamic Positioning in Ice Sofien Kerkeni SIREHNA Ivan Metrikin Norwegian
Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 DESIGN AND CONTROL SESSION II Automatic Heading Control for Dynamic Positioning in Ice Sofien Kerkeni SIREHNA Ivan Metrikin Norwegian
CONTROL VALVE TESTING
 The optimal functioning of the Control valve not only exists of sufficient body & seat tightness, but more important, the total "performance" of the valve and its controls! For an accurate and reliable
The optimal functioning of the Control valve not only exists of sufficient body & seat tightness, but more important, the total "performance" of the valve and its controls! For an accurate and reliable
Understanding Centrifugal Compressor Capacity Controls:
 Understanding Centrifugal Compressor Capacity Controls: Richard Stasyshan, CAGI Technical Consultant and the Centrifugal Compressor Section of the Compressed Air & Gas Institiute (CAGI). CAGI and our centrifugal
Understanding Centrifugal Compressor Capacity Controls: Richard Stasyshan, CAGI Technical Consultant and the Centrifugal Compressor Section of the Compressed Air & Gas Institiute (CAGI). CAGI and our centrifugal
Electronic Monitoring of Norwegian Minke Whaling
 Electronic Monitoring of Norwegian Minke Whaling By Dr. Egil Ole Øen Associate professor Norwegian School of Veterinary Science Section of Arctic Veterinary Medicine Norway Submitted to IWC 2005 Management
Electronic Monitoring of Norwegian Minke Whaling By Dr. Egil Ole Øen Associate professor Norwegian School of Veterinary Science Section of Arctic Veterinary Medicine Norway Submitted to IWC 2005 Management
Diver Training Options
 MAIN INTERNET ON-SITE TAILORED PACKAGES INTER-COMPANY Diver Training Options DBI offers a menu of tailored courses Designed for users as well as IT Professionals to learn how to master the functionality
MAIN INTERNET ON-SITE TAILORED PACKAGES INTER-COMPANY Diver Training Options DBI offers a menu of tailored courses Designed for users as well as IT Professionals to learn how to master the functionality
TECNAUTIC_GmbH. Display Functions with the PB100/200 connected: -- GND Speed -- GND Course -- Heading (Gyro option is recommended) 2 m
 2 m") PB100/200 Sonic Wind Wind, GPS, Compass Display Config: SE=12 di=00 df=20,91,30,34,(61) 35,36,81 Gr=01 n0=00 n1=07 n2=07**) n3=00 Display Functions with the PB100/200 connected: -- Apparent Wind -- True
PB100/200 Sonic Wind Wind, GPS, Compass Display Config: SE=12 di=00 df=20,91,30,34,(61) 35,36,81 Gr=01 n0=00 n1=07 n2=07**) n3=00 Display Functions with the PB100/200 connected: -- Apparent Wind -- True
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
SCIENTIFIC DATA SYSTEMS, INC. Depth Tension Line Speed Panel. DTLS Manual
 SCIENTIFIC DATA SYSTEMS, INC. Depth Tension Line Speed Panel DTLS Manual This document contains proprietary information. Copyright 2015 Scientific Data Systems, Inc. All rights reserved. 1 Depth Tension
SCIENTIFIC DATA SYSTEMS, INC. Depth Tension Line Speed Panel DTLS Manual This document contains proprietary information. Copyright 2015 Scientific Data Systems, Inc. All rights reserved. 1 Depth Tension
Preparation for Salinity Control ME 121
 Preparation for Salinity Control ME 121 This document describes a set of measurements and analyses that will help you to write an Arduino program to control the salinity of water in your fish tank. The
Preparation for Salinity Control ME 121 This document describes a set of measurements and analyses that will help you to write an Arduino program to control the salinity of water in your fish tank. The
Distributed Control Systems
 Unit 41: Unit code Distributed Control Systems M/615/1509 Unit level 5 Credit value 15 Introduction With increased complexity and greater emphasis on cost control and environmental issues, the efficient
Unit 41: Unit code Distributed Control Systems M/615/1509 Unit level 5 Credit value 15 Introduction With increased complexity and greater emphasis on cost control and environmental issues, the efficient
- 2 - Companion Web Site. Back Cover. Synopsis
 Companion Web Site A Programmer's Introduction to C# by Eric Gunnerson ISBN: 1893115860 Apress 2000, 358 pages This book takes the C programmer through the all the details from basic to advanced-- of the
Companion Web Site A Programmer's Introduction to C# by Eric Gunnerson ISBN: 1893115860 Apress 2000, 358 pages This book takes the C programmer through the all the details from basic to advanced-- of the
WG Marine Intruder Detection Sonar
 fire safety security defence The Westminster Marine Intruder Detection Sonar (WG MIDS) system is a single- or multi-head active sonar system designed to automatically detect and track underwater and surface
fire safety security defence The Westminster Marine Intruder Detection Sonar (WG MIDS) system is a single- or multi-head active sonar system designed to automatically detect and track underwater and surface
LX Compass module 3 Electronic compass device User manual
 LX Compass module 3 Electronic compass device User manual LX navigation d.o.o., Tkalska 10 SLO 3000 Celje, tel: + 386 3 490 46 70, fax: + 386 3 490 46 71 info@lxnavigation.si, http://www.lxnavigation.com
LX Compass module 3 Electronic compass device User manual LX navigation d.o.o., Tkalska 10 SLO 3000 Celje, tel: + 386 3 490 46 70, fax: + 386 3 490 46 71 info@lxnavigation.si, http://www.lxnavigation.com
WL16 WATER LEVEL LOGGERS Submersible pressure transducer and USB datalogger combination
 WL16 WATER LEVEL LOGGERS Submersible pressure transducer and USB datalogger combination Warning: Non-vented water level loggers may have readings with errors of up to 250mm due to barometric pressure changes.
WL16 WATER LEVEL LOGGERS Submersible pressure transducer and USB datalogger combination Warning: Non-vented water level loggers may have readings with errors of up to 250mm due to barometric pressure changes.
Investigating the Problems of Ship Propulsion on a Supercomputer
 Ship Elbrus powered by What I See is What I Understand. Так мы его задумали Investigating the Problems of Ship Propulsion on a Supercomputer A.A. Aksenov, S.V. Zhluktov, D.P. Silaev, S.A. Kharchenko, E.A.
Ship Elbrus powered by What I See is What I Understand. Так мы его задумали Investigating the Problems of Ship Propulsion on a Supercomputer A.A. Aksenov, S.V. Zhluktov, D.P. Silaev, S.A. Kharchenko, E.A.
Experiment Results for Automatic Ship Berthing using Artificial Neural Network Based Controller. Yaseen Adnan Ahmed.* Kazuhiko Hasegawa.
 Preprints of the 19th World Congress The International Federation of Automatic Control Cape Town, South Africa. August -9, 1 Experiment Results for Automatic Ship Berthing using Artificial Neural Network
Preprints of the 19th World Congress The International Federation of Automatic Control Cape Town, South Africa. August -9, 1 Experiment Results for Automatic Ship Berthing using Artificial Neural Network
Artificial Intelligence for the EChO Mission Scheduler
 Artificial Intelligence for the EChO Mission Scheduler Álvaro García Piquer Ignasi Ribas Josep Colomé Institute of Space Sciences (CSIC/IEEC), Barcelona, Spain SCIOPS 2013 September 10 13, 2013 Introduction
Artificial Intelligence for the EChO Mission Scheduler Álvaro García Piquer Ignasi Ribas Josep Colomé Institute of Space Sciences (CSIC/IEEC), Barcelona, Spain SCIOPS 2013 September 10 13, 2013 Introduction
Line Following with RobotC Page 1
 Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
Microsoft System Center Data
 U ft i V F_R S! TA TSBIB L! OTHEK MAMMOVER J Microsoft System Center Data Protection Manager 2012 SP1 Learn how to deploy, monitor, and administer System Center Data Protection Manager 2012 SP1 Steve Buchanan
U ft i V F_R S! TA TSBIB L! OTHEK MAMMOVER J Microsoft System Center Data Protection Manager 2012 SP1 Learn how to deploy, monitor, and administer System Center Data Protection Manager 2012 SP1 Steve Buchanan
Advancements in Personnel Incapacitation Methodologies for Multiple Cartridge Projectiles (MPCs)
") U.S. Army Research, Development and Engineering Command Advancements in Personnel Incapacitation Methodologies for Multiple Cartridge Projectiles (MPCs) NDIA Joint Armaments: Conference, Exhibition, and
U.S. Army Research, Development and Engineering Command Advancements in Personnel Incapacitation Methodologies for Multiple Cartridge Projectiles (MPCs) NDIA Joint Armaments: Conference, Exhibition, and
Technical Data Sheet MF010-O-LC
 Technical Data Sheet MF010-O-LC - 1 - 1. Properties The oxygen measuring system MF010-O-LC determines the oxygen content in gas mixtures up to a temperature of 250 C. It is particularly suitable for the
Technical Data Sheet MF010-O-LC - 1 - 1. Properties The oxygen measuring system MF010-O-LC determines the oxygen content in gas mixtures up to a temperature of 250 C. It is particularly suitable for the
GNSS Technology for the Determination of Real-Time Tidal Information
 GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
Software Manual for FITstep Pro Version 2
 Thank you for purchasing this product from Gopher. If you are not satisfied with any Gopher purchase for any reason at any time, contact us and we will replace the product, credit your account, or refund
Thank you for purchasing this product from Gopher. If you are not satisfied with any Gopher purchase for any reason at any time, contact us and we will replace the product, credit your account, or refund
AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION
 AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION OMAR AHMAD oahmad@nads-sc.uiowa.edu YIANNIS E. PAPELIS yiannis@nads-sc.uiowa.edu National Advanced Driving
AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION OMAR AHMAD oahmad@nads-sc.uiowa.edu YIANNIS E. PAPELIS yiannis@nads-sc.uiowa.edu National Advanced Driving
Project 1 Those amazing Red Sox!
 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.001 Structure and Interpretation of Computer Programs Spring Semester, 2005 Project 1 Those amazing Red
MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.001 Structure and Interpretation of Computer Programs Spring Semester, 2005 Project 1 Those amazing Red
Inventor Hole Notes: How to Annotate with Drill Numbers Not Diameters
 TECHNICAL WHITEPAPER Inventor Hole Notes: How to Annotate with Drill Numbers Not Diameters Introduction Hole notes in Inventor are a great drawing aid that can save a drafter significant amounts of time
TECHNICAL WHITEPAPER Inventor Hole Notes: How to Annotate with Drill Numbers Not Diameters Introduction Hole notes in Inventor are a great drawing aid that can save a drafter significant amounts of time
Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II.
 Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II Giuseppe Callea BhaiTech Technology BhaiTech Technology 1 Company Presentation Brief Recall
Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II Giuseppe Callea BhaiTech Technology BhaiTech Technology 1 Company Presentation Brief Recall
Operating instructions Capacitive sensors KG AC (M18) / / 2010
 / / 2010") Operating instructions Capacitive sensors KG AC (M18) UK 704923 / 00 09 / 2010 Contents 1 Preliminary note 3 2 Safety instructions 3 3 Functions and features 3 3.1 Application examples 4 4 Installation
Operating instructions Capacitive sensors KG AC (M18) UK 704923 / 00 09 / 2010 Contents 1 Preliminary note 3 2 Safety instructions 3 3 Functions and features 3 3.1 Application examples 4 4 Installation
Global Flow Solutions Mark Zagar, Cheng Hu-Hu, Yavor Hristov, Søren Holm Mogensen, Line Gulstad Vestas Wind & Site Competence Centre, Technology R&D
 Global Flow Solutions Mark Zagar, Cheng Hu-Hu, Yavor Hristov, Søren Holm Mogensen, Line Gulstad Vestas Wind & Site Competence Centre, Technology R&D vestas.com Outline The atmospheric modeling capabilities
Global Flow Solutions Mark Zagar, Cheng Hu-Hu, Yavor Hristov, Søren Holm Mogensen, Line Gulstad Vestas Wind & Site Competence Centre, Technology R&D vestas.com Outline The atmospheric modeling capabilities
Release Performance Notes TN WBMS _R _Release_Presentation.pptx 22 September, 2014
 TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
The Application Of Computer Modeling To Improve The Integrity Of Ballast Tanks
 Paper No. 4255 The Application Of Computer Modeling To Improve The Integrity Of Ballast Tanks Robert Adey, Guy Bishop, John Baynham, CM BEASY Ltd Ashurst Lodge Southampton, SO40 7AA, UK ABSTRACT Generally
Paper No. 4255 The Application Of Computer Modeling To Improve The Integrity Of Ballast Tanks Robert Adey, Guy Bishop, John Baynham, CM BEASY Ltd Ashurst Lodge Southampton, SO40 7AA, UK ABSTRACT Generally
DP Ice Model Test of Arctic Drillship
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 211 ICE TESTING SESSION DP Ice Model Test of Arctic Drillship Torbjørn Hals Kongsberg Maritime, Kongsberg, Norway Fredrik
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 211 ICE TESTING SESSION DP Ice Model Test of Arctic Drillship Torbjørn Hals Kongsberg Maritime, Kongsberg, Norway Fredrik
Instruction Manual. BZ7002 Calibration Software BE
 Instruction Manual BZ7002 Calibration Software BE6034-12 Index _ Index Index... 2 Chapter 1 BZ7002 Calibration Software... 4 1. Introduction... 5 Chapter 2 Installation of the BZ7002... 6 2. Installation
Instruction Manual BZ7002 Calibration Software BE6034-12 Index _ Index Index... 2 Chapter 1 BZ7002 Calibration Software... 4 1. Introduction... 5 Chapter 2 Installation of the BZ7002... 6 2. Installation
Confidence Under Pressure
 Confidence Under Pressure Commercial jfdglobal.com Introduction Our vision is to be the unrivalled, first choice partner to commercial, international underwater operators and global defence forces in our
Confidence Under Pressure Commercial jfdglobal.com Introduction Our vision is to be the unrivalled, first choice partner to commercial, international underwater operators and global defence forces in our
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results