The MEDUSA Deep Sea and FUSION AUVs:
|
|
|
- Magdalen Norris
- 5 years ago
- Views:
Transcription





1 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST
 Extended Continental Shelf 4 million km 2 91% of EU territory (land) Fisheries and Aquaculture Genetic and")
2 Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic Zone (EEZ) Extended Continental Shelf 4 million km 2 91% of EU territory (land) Fisheries and Aquaculture Genetic and Living Resources Mineral / Hydrocarbon / Oil & Gas Exploitation Offshore and Wave Energy Harvesting Maritime Logistics

3 Objectives

: 1.")

4 Requirements Develop a deep-sea AUV to cover the deep-sea areas of the national remote oceanic areas, up to 3000 m depth. The MEDUSA Deep Sea system should be designed to comply with the requirements of three typical scenario missions (while leaving the flexibility for other future developments): 1. data download and water column profiling, 2. resource exploration and mapping, and 3. high resolution habitat mapping. The final demonstration will cover at least Scenario 1 at a deep-sea location (1000 m depth minimum). Scenario 1 Scenario 2 Scenario 3
5 Mission Scenario 1 Data download and water column profiling Shuttle carrying data (data download or data mule) in collaboration with other platforms. The goals are: To reach the seabed and homing on a fixed lander or oceanic observatory. In the descent the AUV will perform water column data acquisition in a well defined spiral with negative pitch. Finally the AUV changes to high pitch attitude for the ascent and will spiral all the way up to the surface.
6 Mission Scenario 2 Resource exploration and mapping Exploring and mapping resources from the deep-sea (e.g. Mid-Atlantic Ridge). The AUV group will perform transects, measure water parameters near the seabed acquiring side scan sonar data. In this mission the MEDUSA Deep Sea system will have an ASV plus 3 to 5 collaborating AUVs. During transects the AUV system will search for hydrothermal sources.
7 Mission Scenario 3 High resolution habitat mapping high resolution habitat mapping with an ASV and 3 to 5 AUVs performing lawn mower trajectories, at 2-3 m altitude from the sea bottom carrying high resolution cameras and side scan sonar configured for the highest resolution to allow scientists to map and describe deep-sea ecosystems benthic communities and its functioning
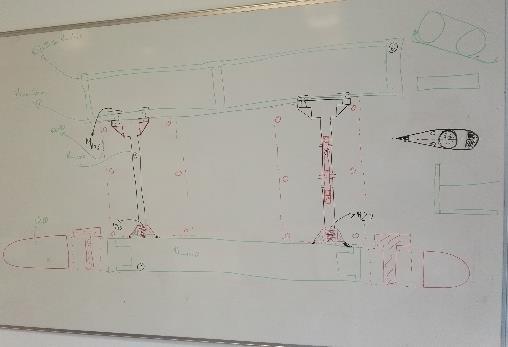
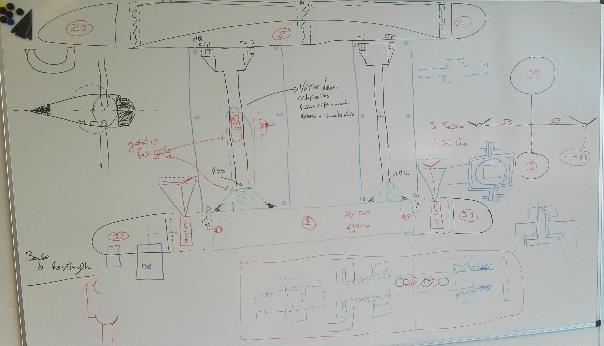
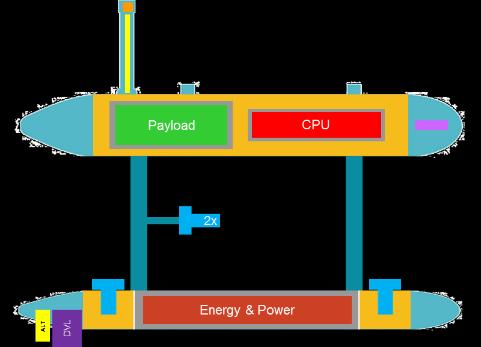
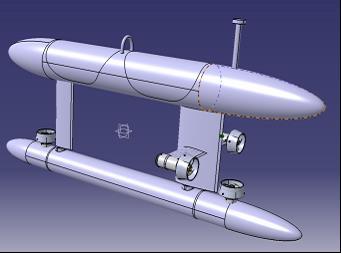
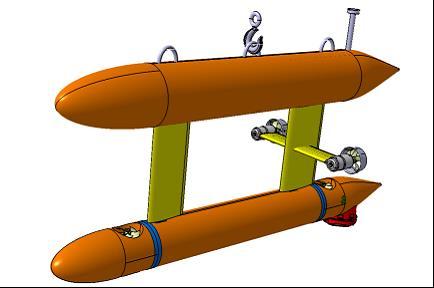



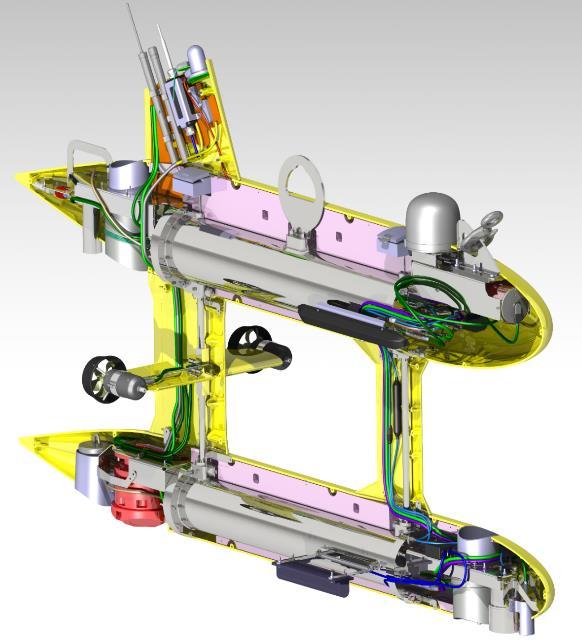
8 Development - Concept(s)

9 Spec. Summary MAIN CHARACTERISTICS Type: Double hull AUV Size: 2.8 m x 1.5 m x 0.7 m Weight: ~300 kg Endurance: ~10 hrs Range: ~50 km Maximum depth: 3000 meters Maximum speed: 3 m/s Nominal speed: 1,25 m/s DOF: 4 Power system capacity: 2.4 kwh Launch and recovery: Crane MISSIONS Seabed Mapping Oil and Gas Survey Geophysical Survey Oceanographic survey Search and Recovery




10 System Breakdown POSEIDON GPS Antenna Iridium Beacon Mini Flasher Beacon Wi-Fi b/g GPS Board AHRS Vectornav Gyros EPIC Computers Wi-Fi elect Hard Disks SSS + SBP electronics KELLER PAA-33XEi Depth Cell EvoLogics USBL Modem ECO FLNTU Fluorometer and Scattering Meter O2 Subsea Oxygen Sensor 4x Thrusters Argus ARS-800 Mini-Thruster EdgeTech 2200 Side Scan Sonar ISA 500 Altimeter Workhorse Navigator Doppler Velocity Log Lithium polymer batteries EdgeTech 2200 Sub-Bottom Profiler
11 Software Architecture Built in ROS (Robot Operating System) Based on software nodes that communicate via topics; all communications handled transparently by ROS Very active community, large code base publicly available Easy to extend






12 Sea trials -Hull pressure testing at 1000 m (2016/12) IPMA s research vessel NORUEGA

13 The story of the Medusa Deep Sea so far!
14 Extra Slides and now, for something slightly different


15 Merging Industry and Academia Innovation Extra Slides SRS has teamed up with talented companies and individuals around the world that work together with bright and clever ideas. The sharing environment instills creativity, fresh outlooks and challenging conformity. The result is evident in the exceptional products that reshape the way underwater operations are conducted."


16 SRS FUSION Hybrid System - An Innovative Concept



17 SRS FUSION Hybrid System Key Components Human Machine Interface


18 IST Know-How Applied to SRS FUSION Capitalizing on the know-how obtained from years of developing the MEDUSA Class AUVs IST main contribution: Navigation and Control Systems Development Implementation Optimization IST also contributes on Simulation Environment FUSION Field-Testing want to see a demo? Come a and talk to us! The different operating modes rely on IST s Software Architecture Implementation

19 IST Know-How Applied to SRS FUSION Vehicle Components Navigation Pod DVL Electronics Navigation Tower USBL GPS WIFI Pressure/Temperature Key Features Single Titanium Exterior Fastener Single Interior Fastener Connectorized Electronics with Wiring Loom Rugged Aluminum/Composite Construction Barometric Pressure Monitor Electronics Pod running different subsystems including Navigation and Control Systems Multi-Beam Sonar Fiber Optic Connector Power Button Camera Module Camera LED Lights Laser Scaling Thruster Motor Controller Transducer Pod Doppler Velocity Log Side Scan Sonar Echo Sounder Power Distribution Pod


20 IST Know-How Applied to SRS FUSION Vehicle Components Key Features Single Titanium Exterior Fastener Single Interior Fastener Connectorized Electronics with Wiring Loom Rugged Aluminum/Composite Construction Barometric Pressure Monitor



21 The MEDUSA Deep Sea and FUSION AUVs When research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST 21
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Cooperative Autonomous Robotics at Sea
 Cooperative Robotics at Sea Andreas J. Häusler Laboratory of Robotics and Systems in Science and Engineering Instituto Superior Técnico Lisbon, Portugal MARUM, September 9, 2014 Introduction Cheira bem,
Cooperative Robotics at Sea Andreas J. Häusler Laboratory of Robotics and Systems in Science and Engineering Instituto Superior Técnico Lisbon, Portugal MARUM, September 9, 2014 Introduction Cheira bem,
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
ACCESS the BLUE ECONOMY ALL OCEANS Engineering Ltd
 Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa
 Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Field testing of the Nereus network
 Field testing of the Nereus network Harry Hemond Department of Civil and Environmental Engineering Massachusetts Institute of Technology Cambridge, MA Prior Work: Portable Mass Spectrometer for Metabolic
Field testing of the Nereus network Harry Hemond Department of Civil and Environmental Engineering Massachusetts Institute of Technology Cambridge, MA Prior Work: Portable Mass Spectrometer for Metabolic
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem.
 Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem. S. Afzulpurkar, P. Maurya, G. Navelkar, E. Desa, A. Mascarenhas, N. Dabholkar, R. Madhan 1, S.
Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem. S. Afzulpurkar, P. Maurya, G. Navelkar, E. Desa, A. Mascarenhas, N. Dabholkar, R. Madhan 1, S.
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
The I-UTECH Consortium
 The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
PRICE LIST 5 April 2018
 PRICE LIST 5 April 2018 Garmin RRP incl VAT 010-01760-10 - Silver with Black Band R 16 999.00 Barcode: 753759186890 ICASA: TA-2017/3182 Box Content: - TopoActive Africa Map (Pre-Loaded) - Charging/Data
PRICE LIST 5 April 2018 Garmin RRP incl VAT 010-01760-10 - Silver with Black Band R 16 999.00 Barcode: 753759186890 ICASA: TA-2017/3182 Box Content: - TopoActive Africa Map (Pre-Loaded) - Charging/Data
A Wind Profiling Platform for Offshore Wind Measurements and Assessment. Presenter: Mark Blaseckie AXYS Technologies Inc.
 A Wind Profiling Platform for Offshore Wind Measurements and Assessment Presenter: Mark Blaseckie AXYS Technologies Inc. Any Sensor, Any Telemetry, Any Environment Founded in 1974 Part of the AXYS Group
A Wind Profiling Platform for Offshore Wind Measurements and Assessment Presenter: Mark Blaseckie AXYS Technologies Inc. Any Sensor, Any Telemetry, Any Environment Founded in 1974 Part of the AXYS Group
Malta Survey activities
 Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
Testing and Evaluation of REMUS Vehicle Systems
 Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader Community
 Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
AUVs for oceanographic science at IFREMER, project progress and operational feedback
 AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions
 Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
A Distributed Control System using CAN bus for an AUV
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Overview: Underwater sensing
 Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
The SeaBED AUV A Platform for High Resolution Imaging
 The SeaBED AUV A Platform for High Resolution Imaging Hanumant Singh, Ryan Eustice, Chris Roman, Oscar Pizarro, Deep Submergence Laboratory, MS # 7, Woods Hole Oceanographic Institution, Woods Hole MA
The SeaBED AUV A Platform for High Resolution Imaging Hanumant Singh, Ryan Eustice, Chris Roman, Oscar Pizarro, Deep Submergence Laboratory, MS # 7, Woods Hole Oceanographic Institution, Woods Hole MA
MEASUREMENT COMMUNICATION INSIGHT
 Temperature & Depth MEASUREMENT COMMUNICATION INSIGHT CONTENTS Introduction to Aquatec Measuring Temperature and Depth 2 3 Aquatec s Temperature and Depth Loggers AQUAlogger 520 AQUAlogger 530 AQUAlogger
Temperature & Depth MEASUREMENT COMMUNICATION INSIGHT CONTENTS Introduction to Aquatec Measuring Temperature and Depth 2 3 Aquatec s Temperature and Depth Loggers AQUAlogger 520 AQUAlogger 530 AQUAlogger
An accident at sea, such as an
 Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Autonomous Underwater Vehicles Explorer Class
 Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
MISSION PLANNING AND DATA ACQUISITION SOFTWARE
 MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
Update on Canadian Research Vessels Ship Procurement Projects
 Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
KAIREI Cruise Report. KR17-11 Leg2
 KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
An Integrated Marine Gradiometer Array System (MGA)
") An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology
 How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science
 Moorings: New Capabilities for Seagoing Science") Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
SHUTTLE-SUBs ALL OCEANS Engineering Ltd
 SUK Underwater Vehicles Conference 21.11.17 SHUTTLE-SUBs AC-ROV 3000m Fly-out System Introduced in 2011 MAC-ROV 6000m Fly-out System (2017) 6000m, 4k and HD cameras, SM fibre telemetry Expandable architecture,
SUK Underwater Vehicles Conference 21.11.17 SHUTTLE-SUBs AC-ROV 3000m Fly-out System Introduced in 2011 MAC-ROV 6000m Fly-out System (2017) 6000m, 4k and HD cameras, SM fibre telemetry Expandable architecture,
Development of 7,000m Class ROV KAIKO7000
 Development of 7,000m Class ROV KAIKO7000 H. Sezoko*, T. Murashima*, H. Nakajyoh*, H. Yoshida*, N. Yamauchi** * Research Support Department (RSD), Marine Technology Center (MARITEC) Japan Agency for Marine-Earth
Development of 7,000m Class ROV KAIKO7000 H. Sezoko*, T. Murashima*, H. Nakajyoh*, H. Yoshida*, N. Yamauchi** * Research Support Department (RSD), Marine Technology Center (MARITEC) Japan Agency for Marine-Earth
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Review and Classification of The Modern ROV
 Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
BUYER S GUIDE AQUAlogger 530WTD
 OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
!"#$%&'()*$+,,($-!.#$/*)0*122$!13)*4$
*$+,,($-!.#$/*)0*122$!13)*4$") In collaboration with WHOI NDSF and DeepSea Challenger, develop a technologically advanced 11k HROV (ROV or AUV) for R/V Falkor, supporting: Robust access to abyssal and hadal zones for scientific research
In collaboration with WHOI NDSF and DeepSea Challenger, develop a technologically advanced 11k HROV (ROV or AUV) for R/V Falkor, supporting: Robust access to abyssal and hadal zones for scientific research
Yokosuka Cruise Report YK11-02
 Yokosuka Cruise Report YK11-02 Sea Trial of The HETL Fuel Cell System for Underwater Platform JAMSTEC ~ Sagami-Bay ~ JAMSTEC March 6, 2011 ~ March 9, 2011 Japan Agency for Marine-Earth Science and Technology
Yokosuka Cruise Report YK11-02 Sea Trial of The HETL Fuel Cell System for Underwater Platform JAMSTEC ~ Sagami-Bay ~ JAMSTEC March 6, 2011 ~ March 9, 2011 Japan Agency for Marine-Earth Science and Technology
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
PO Box 2723, 4 Strand Street, Port Alfred, Eastern Cape, South Africa Contact number : Office (9-12pm)
") Company Profile General Business Information SAROV CC (South African Remotely Operated Vehicles) PO Box 2723, 4 Strand Street, Port Alfred, Eastern Cape, South Africa 6170 Contact number : Office +27 46
Company Profile General Business Information SAROV CC (South African Remotely Operated Vehicles) PO Box 2723, 4 Strand Street, Port Alfred, Eastern Cape, South Africa 6170 Contact number : Office +27 46
NEW SURVEY MOTOR LAUNCHES FOR THE ROYAL AUSTRALIAN NAVY
 International Hydrographic Review, Monaco, LXVI(l), January 1989 NEW SURVEY MOTOR LAUNCHES FOR THE ROYAL AUSTRALIAN NAVY by Commander John LEECH, RAN (*) INTRODUCTION By any standards the task facing the
International Hydrographic Review, Monaco, LXVI(l), January 1989 NEW SURVEY MOTOR LAUNCHES FOR THE ROYAL AUSTRALIAN NAVY by Commander John LEECH, RAN (*) INTRODUCTION By any standards the task facing the
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
JAMSTEC trial of 11,000m UROV
 JAMSTEC trial of 11,000m UROV Representative : Kikuo Hashimot (Director) Presenting : Hidehiko Nakajoh Japan Agency for Marine Earth Science and Technology ( JAMSTEC ) 2-15 Natsushima-cho Yokosuka, Japan
JAMSTEC trial of 11,000m UROV Representative : Kikuo Hashimot (Director) Presenting : Hidehiko Nakajoh Japan Agency for Marine Earth Science and Technology ( JAMSTEC ) 2-15 Natsushima-cho Yokosuka, Japan
Oceanographic Research With The LiquID Station
 Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300. Wolfgang Burnside
 The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300 Wolfgang Burnside TRV-005 Series: Standard Features and Benefits Frame The TRV 005 Series
The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300 Wolfgang Burnside TRV-005 Series: Standard Features and Benefits Frame The TRV 005 Series
Offshore Wind Energy Stringent quality assurance and quality control. Coastal and Freshwater Fast responding and flexible organisation
 Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico.
 Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test
 NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries
 N-ICE2015 Norwegian Young Sea ICE cruise 2015 141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries Kronprins Haakon Then and now Fincantieri Hull fabrication
N-ICE2015 Norwegian Young Sea ICE cruise 2015 141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries Kronprins Haakon Then and now Fincantieri Hull fabrication
Challenges in determining water surface in airborne LiDAR topobathymetry. Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014
 Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
WEBB RESEARCH CORPORATION
 Use spacebar or arrow keys to advance slide show WEBB RESEARCH CORPORATION Falmouth, MA APEX Profiler SLOCUM Glider Rev: 06/22/08 WEBB RESEARCH CORPORATION Specialists in neutrally buoyant drifters and
Use spacebar or arrow keys to advance slide show WEBB RESEARCH CORPORATION Falmouth, MA APEX Profiler SLOCUM Glider Rev: 06/22/08 WEBB RESEARCH CORPORATION Specialists in neutrally buoyant drifters and
Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways.
 Accura Hydrographic RC Survey Boat Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways. Utilises Sounder & Transducer from CEE
Accura Hydrographic RC Survey Boat Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways. Utilises Sounder & Transducer from CEE
R3M: The 2.0 Ocean Observation Strategy for the Macaronesian region
 R3M: The 2.0 Ocean Observation Strategy for the Macaronesian region OUTLINE Where? Who? What? Why? What else? Where? Where? Where? European Station for Time-series in the OCean (ESTOC). Since 1992 60 Nm
R3M: The 2.0 Ocean Observation Strategy for the Macaronesian region OUTLINE Where? Who? What? Why? What else? Where? Where? Where? European Station for Time-series in the OCean (ESTOC). Since 1992 60 Nm
BUYER S GUIDE AQUAlogger 520
 OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 520 Mini Temperature and Pressure Logger AQUAlogger 520 Aquatec s primary temperature and depth model, the AQUAlogger 520, combines years of product development
OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 520 Mini Temperature and Pressure Logger AQUAlogger 520 Aquatec s primary temperature and depth model, the AQUAlogger 520, combines years of product development
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System
 Light Fiber Tether System") Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
Simrad yachting catalog 2007
 26 AUTOSTEERING Electronic intelligence combined with powerful and reliable designs make sure you enjoy boating even more. 27 Tillerpilots Enjoy silence when sailing SIMRAD TP SERIES REMOTE COMMANDER High
26 AUTOSTEERING Electronic intelligence combined with powerful and reliable designs make sure you enjoy boating even more. 27 Tillerpilots Enjoy silence when sailing SIMRAD TP SERIES REMOTE COMMANDER High
SUPER YACHT SUB SERIES
 SUPER YACHT SUB SERIES THE ULTIMATE LUXURY SUBMERSIBLE 3 OCCUPANTS 100M 500M The Ultimate in Superyacht Luxury Compact and luxurious private submarines especially designed to fit aboard superyachts, the
SUPER YACHT SUB SERIES THE ULTIMATE LUXURY SUBMERSIBLE 3 OCCUPANTS 100M 500M The Ultimate in Superyacht Luxury Compact and luxurious private submarines especially designed to fit aboard superyachts, the
The MARES AUV, a Modular Autonomous Robot for Environment Sampling
 The MARES AUV, a Modular Autonomous Robot for Environment Sampling Nuno A. Cruz and Aníbal C. Matos Faculdade de Engenharia da Universidade do Porto Rua Dr. Roberto Frias, 4200-465, Porto, Portugal Email:
The MARES AUV, a Modular Autonomous Robot for Environment Sampling Nuno A. Cruz and Aníbal C. Matos Faculdade de Engenharia da Universidade do Porto Rua Dr. Roberto Frias, 4200-465, Porto, Portugal Email:
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks
 In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
Isis Deployment. TMS and Live Boating. Inmartech08. Dave Turner Operations Co-ordinator.
 Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
PROVOR/ ARVOR ARGO profiling floats
 PROVOR/ ARVOR ARGO profiling floats Euroargo 24-25 june 2008 Patrice Brault Kannad A long partnership A family of floats 1st float MARVOR : multicycle Rafos float in 90-94 PROVOR for ARGO program in 99
PROVOR/ ARVOR ARGO profiling floats Euroargo 24-25 june 2008 Patrice Brault Kannad A long partnership A family of floats 1st float MARVOR : multicycle Rafos float in 90-94 PROVOR for ARGO program in 99
WMB-160F Multi-beam Fishing System
 WMB-160F Multi-beam Fishing System Take away the guess work and see what s REALLY below your boat! Seven Systems in One 2 WMB-160F WMB-160F Screen Shots The WMB-160F is a multi-beam sonar that has been
WMB-160F Multi-beam Fishing System Take away the guess work and see what s REALLY below your boat! Seven Systems in One 2 WMB-160F WMB-160F Screen Shots The WMB-160F is a multi-beam sonar that has been
Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001
 Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001 Anthony J. Healey David B. Marco Center for Autonomous Underwater Vehicle Research Naval Postgraduate School Monterey, CA phone: (831)-656-3462
Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001 Anthony J. Healey David B. Marco Center for Autonomous Underwater Vehicle Research Naval Postgraduate School Monterey, CA phone: (831)-656-3462
REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2
 REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2 17 19 September 2012 TD/RP/163 REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2 17 19 September
REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2 17 19 September 2012 TD/RP/163 REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2 17 19 September
Axial Base (PN3A) Medium-Power (MP) J-box
 Medium-Power (MP) J-box") Axial Base (PN3A) Medium-Power (MP) J-box Location: 46.1 N, 129.6 W Depth of Water Column: 2654 m This node supports geophysical instruments at the base of Axial Seamount. Instrument Name/Description Data
Axial Base (PN3A) Medium-Power (MP) J-box Location: 46.1 N, 129.6 W Depth of Water Column: 2654 m This node supports geophysical instruments at the base of Axial Seamount. Instrument Name/Description Data
0TMS Design and analysis of ITB ultra deep ROV
 0TMS Design and analysis of ITB ultra deep ROV Muljowidodo K. 1, Nico Prayogo 2 & Sapto Adi Nugroho 3 1 Faculty of Mechanical and Aerospace Engineering, Institut Teknologi Bandung (ITB) Jl. Ganesha 10,
0TMS Design and analysis of ITB ultra deep ROV Muljowidodo K. 1, Nico Prayogo 2 & Sapto Adi Nugroho 3 1 Faculty of Mechanical and Aerospace Engineering, Institut Teknologi Bandung (ITB) Jl. Ganesha 10,
Seaeye Falcon powerful portable versatile
 Seaeye Falcon 12170 powerful portable versatile The powerful, portable and versatile Seaeye Falcon designed for coastal and inshore operations to 300 metres water depth or for fly away operations offshore.
Seaeye Falcon 12170 powerful portable versatile The powerful, portable and versatile Seaeye Falcon designed for coastal and inshore operations to 300 metres water depth or for fly away operations offshore.
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements
 Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Survey solutions. catalogue DEEP INSIGHT. SHARPER SENSES.
 Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Exploration of Underwater Volcano by Autonomous Underwater Vehicle
 Exploration of Underwater Volcano by Autonomous Underwater Vehicle Tamaki Ura Institute of Industrial Science, the University of Tokyo ura@iis.u-tokyo.ac.jp, 4-6-1, Komaba, Meguro, Tokyo 153-8505 Japan
Exploration of Underwater Volcano by Autonomous Underwater Vehicle Tamaki Ura Institute of Industrial Science, the University of Tokyo ura@iis.u-tokyo.ac.jp, 4-6-1, Komaba, Meguro, Tokyo 153-8505 Japan
TriMARES a Hybrid AUV/ROV for Dam Inspection
 TriMARES a Hybrid AUV/ROV for Dam Inspection Nuno A. Cruz, Aníbal C. Matos, Rui M. Almeida, Bruno M. Ferreira and Nuno Abreu INESC Porto and University of Porto Rua Dr. Roberto Frias, 378; 4200-465 Porto;
TriMARES a Hybrid AUV/ROV for Dam Inspection Nuno A. Cruz, Aníbal C. Matos, Rui M. Almeida, Bruno M. Ferreira and Nuno Abreu INESC Porto and University of Porto Rua Dr. Roberto Frias, 378; 4200-465 Porto;
HP Sport Sub meters. High performance diving. U-Boat Worx
 HP Sport Sub 2 100 meters High performance diving U-Boat Worx A new way of Diving Take diving to the next level. The HP Sport Sub 2 is the first fully certified submersible featuring compact size, high
HP Sport Sub 2 100 meters High performance diving U-Boat Worx A new way of Diving Take diving to the next level. The HP Sport Sub 2 is the first fully certified submersible featuring compact size, high
Autonomous Environmental Profiling Moorings for Coastal Monitoring
 Autonomous Environmental Profiling Moorings for Coastal Monitoring Jeffrey W. Book Naval Research Laboratory, Stennis Space Center, MS Introduction There are many reasons to monitor coastal environments
Autonomous Environmental Profiling Moorings for Coastal Monitoring Jeffrey W. Book Naval Research Laboratory, Stennis Space Center, MS Introduction There are many reasons to monitor coastal environments
Offshore Oil and Gas Platforms for Deep Waters
 Offshore Oil and Gas Platforms for Deep Waters Atilla Incecik Department of Naval Architecture, Ocean and Marine Engineering University of Strathclyde, Glasgow, UK (atilla.incecik@strath.ac.uk) Summary
Offshore Oil and Gas Platforms for Deep Waters Atilla Incecik Department of Naval Architecture, Ocean and Marine Engineering University of Strathclyde, Glasgow, UK (atilla.incecik@strath.ac.uk) Summary
"Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider"
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography