UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
|
|
|
- Elfreda Green
- 5 years ago
- Views:
Transcription
1 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E


2 GLOBAL FOOTPRINT SUCCESS YOU CAN MEASURE UTEC has offices across most of the major oil & gas producing regions worldwide E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E
3 Acteon Group of Companies Recognised branded service providers, aligned across four expert capabilities Survey, Monitoring and Data Risers and Moorings Seabed Foundation Technologies Project Support Services Please note: Acteon s branded services each align with one lead capability, but this does not preclude offering additional services according to customer need. The segments highlight a primary activity driver, but are not mutually exclusive.
4 Introduction UTEC operates the largest fleet of low logistics AUV in the world with over 50 projects completed on six continents. Today we will focus on a subsea inspection project carried out in Australia in July UTEC s client was Quadrant Energy. 43 pipelines of total length 571km. 20 platform site surveys. Carried out using two Teledyne-Gavia AUVs. Deployed from support vessel MV Yardie Creek.

5 Scope of Work All Varanus Island hub subsea facilities and platforms. Stag and Reindeer fields. Sales Gas pipeline to the mainland. 43 pipelines, 20 platform and structures. Water depths 0 to 110 metres

6 Teledyne-Gavia AUV UTEC owns and operates a fleet of seven Gavia AUVs. Operating depth range from <2m to 1,000m. Small footprint - < 3m long; < 120kg with compact spread layout Low logistics Modular and easy to ship via air freight, mission configurable, small on-deck footprint, lightweight for launch and recovery.
7 Project AUV Configuration Twin battery pack configuration for long duration mission capability SBP Module Not Shown LBL/USBL Acoustic Comms DGPS navigation Propulsion Module Camera & Obstacle Avoidance Sonar INS/DVL navigation 1800kHz & 900kHz high resolution SSS Interferometric multibeam bathymetry (500kHz)

8 Support Vessel - MV Yardie Creek 34m LOA Multi- Purpose Vessel. 2.2m draft. Large back deck. 6 tonne A-frame. Hiab deck crane. 21 berths. Large survey room. 5.8m rigid-hulled inflatable boat.


9 Launch and Recovery Stern launched using winch and A-frame in deeper water. Manually deployed from the RHIB in shallow water. Used RHIB as standard recovery method manual lift into custom chocks in the RHIB, then AUV lifted by vessel crane to deck. In marginal weather, RHIB would tow AUV to stern and place it in purpose-built lifting cradle for A-frame recovery four occasions
10 Field Operations Our AUV capability is global with Centres of Excellence in Houston and Aberdeen completed 50 projects on six continents. We have encountered challenges and learned from these. Our first AUV job in Australia drew on that expertise and applied the global learning. The people were the catalyst for the success of the project. Nine man team drawn from global UTEC AUV pool: 1 x Party Chief 1 x Data Processor 3 x AUV Operators 1 x Geophysicist 1 x AUV Engineer 2 x Online Surveyors
11 Health, Safety and Environment Total Operational Man Hours = 3,408. No injuries to any marine, AUV or survey personnel. No Environmental Incidents. No Asset Damage. No Near Misses during operations. Risk Assessments / Job Safety Analyses completed and reviewed daily. Safety Briefings / Drills = 53. Tool Box Talks = 45.

12 Productivity 27 day project averaging 45km of AUV line survey per day. Average includes non-productive time - weather, transits, calibrations and equipment downtime. Set a new UTEC record on July 11th with 80.5 line km of survey. Surveyed a total of 1,142 line km on pipelines plus 20 platform and structure site surveys.
13 Key to Productivity UTEC used two AUVs back-to-back for the first time. While one AUV was deployed the other was readied for its mission. Each mission duration was between 5 and 6 hours. Reduced the on-deck turnaround time from >2 hours for single vehicle ops to <1 hour, which included data download, battery change-out, INS re-alignment. The increase in productivity more than offset additional costs. Productivity approached that of larger, more expensive AUVs which offer longer mission time due to battery capacity.

14 Challenges Faced (1) Platform Site Surveys: Greatest risk in AUV missions surfacing under a platform, colliding with platform legs or subsea structures. Ran high altitude reconnaissance missions to identify hazards. Gained understanding of speed and direction of currents. Turned down sensitivity of object avoidance sonar to reduce number of aborted missions due to extensive marine life (fish) under platforms.
15 Challenges Faced (2) Shallow Water Near Shore: Several pipelines terminated at Varanus Island or mainland. Scope called for surveying as near to shore as possible. RHIB enabled us to get very close to shore while vessel stayed in deeper water. Missions planned to coincide with peaks of high tide. Ran AUV on surface at ½ speed. Successfully collected high quality data in water depths of 2m and in a couple of cases in less than 1m.

16 Challenges Faced (3) Shallow Water vertical accuracy: AUV is a submerged survey platform - acoustic depths must be combined with AUV depth to resolve final sounding depth. Waves and swells introduce pressure fluctuations = modulate pressure sensor output without any vertical movement of AUV = vertical offsets in seabed profile; looks like the AUV is porpoising. In shallow water even small waves cause significant artifacts in seabed profiles. The Z (vertical) coordinate from the INS is recorded in the raw sonar file and we use that to correct these artifacts.
17 Data Processing Work Flow Data processors, geophysicists and charting specialists create comprehensive data sets for reporting and charting. Four stage iterative process: Process Bathymetry Data Navigation processing to remove INS drift and surface swell artifacts Re-process Bathymetry Data. Process Side-scan Sonar data Perform Geophysical Interpretation

18 Data Processing - Bathymetry Ocean Imaging Consultants CleanSweep software: Corrections for any positional drift from Inertial Navigation System. Filters for Navigation and Attitude. Filters for cleaning any outlier soundings. Algorithms for applying tides, including interpolated tides between multiple stations. Angle Varying Gain corrections for the backscatter. Kongsberg Geoswathe ( 500kHz ) example showing spud can depresssions
19 Removing INS Drift A small linear drift over time or distance traveled is expected from the Inertial Navigation System. We used InterNav (part of CleanSweep) to correct. This matches adjacent swathes and applies a weighting to positions near the start of a mission in preference to those near the end. By overlapping start and end of consecutive missions we constrain the positional uncertainty. Horizontal uncertainty was constrained to less than 2m over the project.
20 Removing Swell / Wave Artifacts Caused by pressure fluctuations from surface swells and waves. AUV position appears to be porpoising when it is in fact stable. A secondary record of the INS Z (vertical) co-ordinate is captured in the raw GeoSwath files. Apply a smoothing filter to the pressure sensor depth observation gives a long period trend of AUV depth. Applying a high-pass filter to the INS Z coordinate leaves a zero mean high frequency record of vertical movement. Combining the two processed records provides an accurate AUV depth record free of swell and wave artifacts.

21 Swell / Wave Artifacts Removed Digital Elevation Model with pressure sensor depth only, revealing the artifacts of 40cm wave heights and 30m wave lengths. Combined depths with artifacts filtered and removed
22 Processing Side Scan Sonar Data MST SSS operates at 900kHz - an appreciable increase in resolution over GeoSwath SSS. GeoSwath navigation is more accurate. By using CleanSweep s import/export tools we applied the GeoSwath navigation and altitude data to improve the MST record position data. High resolution MST SSS mosaics were used for areas requiring a high level of detail.
 vs MST SSS (Right) Tripod platform with")
23 Processing Side-scan Sonar Data GeoSwath SSS (Left) vs MST SSS (Right) Tripod platform with pipelines
24 Geophysical Interpretation Processed GeoSwath and MST SSS data exported in XTF format to Chesapeake Technology SonarWiz software. SonarWiz used to : identify freespans, pipeline burial and other contacts. identifying, measuring and cataloguing events into a database for export to spreadsheets. The freespan tool developed for UTEC combines point contact attributes with a linear feature allowing the feature to be catalogued with height of freespan. Databases then exported to Excel and used for event listing and Pipeline Alignment Charts.
25 Data Presentation Field reports identified areas of concern while still in the field. Interim reports identified critical freespans and cross-checked these against prior year surveys. Fully processed data exported to Geographical Information System (GIS) for final QC checks. Having all items in a single GIS allows consistency checks prior to charting. Each event target is checked against the digital elevation model and the mosaics to ensure correct identification and position. Final report provided Pipeline Alignment Charts (plan view and pipeline events) and full Pipeline Events Listings (freespans, debris, sections of burial etc.)

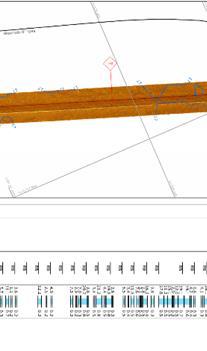
26 Pipeline Charts

27 Platform Charts
28 Meeting Quadrant s Expectations Project met Quadrant s expectation as set out in the Scope of Work. AUV operations in very shallow water meant that 92% of all pipeline kms were surveyed. Total of 571km of pipe surveyed with one-pass each side i.e. 1,142 km of AUV track-line. Twenty platforms and subsea structures surveyed, which was 100% of subsea assets specified in Scope of Work. Total duration was 27 days in mid-winter including mob, demob and transits. Less than 2% operational downtime and only 18% weather downtime impacting launch and recovery. On a per kilometre basis AUV surveys are calculated to be less than 50% of the cost of an ROV survey. AUV surveys substantially contribute to subsea integrity management strategies
 for greater resolution")


29 New Technology - Blue View Sonar MB2250 High frequency (2250 khz) for greater resolution bathymetry Low power and compact Ideal for a variety of applications including: Detailed sub sea survey Pipeline inspections Side Scan Sonar nadir gap fill improves operational efficiency


30 Blue View Sonar MB2250 Data from a pipeline inspection survey

31 Acknowledgements Paper and presentation developed by Bryan M. Keller Travis Hamilton Paul Olsgaard Simon Hird UTEC Survey Diranne Lee-Renwick Quadrant Energy Australia
32 Questions? Thank you! UTECsurvey.com
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping
 Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY
 THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006)
") ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
NEED FOR SUPPLEMENTAL BATHYMETRIC SURVEY DATA COLLECTION
 305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
Recommended operating guidelines (ROG) for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:
 for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:") Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
GNSS Technology for the Determination of Real-Time Tidal Information
 GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
Sensor Platform Project Marine Trials Bidders Conference. Fundy Ocean Research Center for Energy fundyforce.ca
 Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
Product highlights Variable frequency and thrust
 Innovative engineering for extreme global environments FT550 - VIBROCORER The 3rd generation FT550 lightweight variable frequency high power vibrocorer leads the market in its technical innovation and
Innovative engineering for extreme global environments FT550 - VIBROCORER The 3rd generation FT550 lightweight variable frequency high power vibrocorer leads the market in its technical innovation and
Producing Chart Data from Interferometric Sonars on Small AUVs
 Producing Chart Data from Interferometric Sonars on Small AUVs Tom Hiller 1, Thomas B. Reed IV 2, Arnar Steingrimsson 3 1: Thurne Hydrographic Ltd., Norwich, UK. 2: OIC Inc., Honolulu, Hawaii, USA. 3:
Producing Chart Data from Interferometric Sonars on Small AUVs Tom Hiller 1, Thomas B. Reed IV 2, Arnar Steingrimsson 3 1: Thurne Hydrographic Ltd., Norwich, UK. 2: OIC Inc., Honolulu, Hawaii, USA. 3:
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Body Search and Recovery Using Sonar
 Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
COMPARISON OF DEEP-WATER ADCP AND NDBC BUOY MEASUREMENTS TO HINDCAST PARAMETERS. William R. Dally and Daniel A. Osiecki
 COMPARISON OF DEEP-WATER ADCP AND NDBC BUOY MEASUREMENTS TO HINDCAST PARAMETERS William R. Dally and Daniel A. Osiecki Surfbreak Engineering Sciences, Inc. 207 Surf Road Melbourne Beach, Florida, 32951
COMPARISON OF DEEP-WATER ADCP AND NDBC BUOY MEASUREMENTS TO HINDCAST PARAMETERS William R. Dally and Daniel A. Osiecki Surfbreak Engineering Sciences, Inc. 207 Surf Road Melbourne Beach, Florida, 32951
Hydrographic Surveying at The Port of London
 Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar
 Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar Lisa Nicole Brisson, Lead Bathymetry Product Engineer, EdgeTech, Boca Raton, FL Damon Wolfe, Lead Bathymetry Sales Engineer, EdgeTech,
Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar Lisa Nicole Brisson, Lead Bathymetry Product Engineer, EdgeTech, Boca Raton, FL Damon Wolfe, Lead Bathymetry Sales Engineer, EdgeTech,
Unique Group employs over 450 people worldwide through its seven multi-site divisions: Survey Equipment. Marine & Subsea. Diving & Life Support
 As an independently owned global company, Unique Group leads the way in providing engineering expertise, sales and rental equipment and the latest technology for the marine, diving, pipeline and subsea
As an independently owned global company, Unique Group leads the way in providing engineering expertise, sales and rental equipment and the latest technology for the marine, diving, pipeline and subsea
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement
 SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
Chapter 9: Sea operations
 Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Isis Deployment. TMS and Live Boating. Inmartech08. Dave Turner Operations Co-ordinator.
 Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Trine Risøy, Bergen,
 part of Aker The Installation of Subsea Structures without Offshore Crane Vessel Trine Risøy, Bergen, 04.06.2008 2008 Aker Solutions AKER MARINE CONTRACTORS (AMC) 35 years experience worldwide: Subsea
part of Aker The Installation of Subsea Structures without Offshore Crane Vessel Trine Risøy, Bergen, 04.06.2008 2008 Aker Solutions AKER MARINE CONTRACTORS (AMC) 35 years experience worldwide: Subsea
Survey design and acquisition of a 4-C ocean-bottom seismometer survey over the White Rose oilfield, offshore Newfoundland
 White Rose OBS, 2002 Survey design and acquisition of a 4-C ocean-bottom seismometer survey over the White Rose oilfield, offshore Newfoundland Kevin W. Hall and Robert R. Stewart ABSTRACT CREWES, in conjunction
White Rose OBS, 2002 Survey design and acquisition of a 4-C ocean-bottom seismometer survey over the White Rose oilfield, offshore Newfoundland Kevin W. Hall and Robert R. Stewart ABSTRACT CREWES, in conjunction
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
SOP-028 SUB-BOTTOM PROFILER OPERATIONS PROCEDURE
 SOP-028 SUB-BOTTOM PROFILER OPERATIONS PROCEDURE Rev No. Issue Description Prepared Reviewed Approved Date 1 Re-issued for use JAL JPV GF 25 May 11 0 Issued for use JAL JPV GF 28 Feb 11 P1 Prepared for
SOP-028 SUB-BOTTOM PROFILER OPERATIONS PROCEDURE Rev No. Issue Description Prepared Reviewed Approved Date 1 Re-issued for use JAL JPV GF 25 May 11 0 Issued for use JAL JPV GF 28 Feb 11 P1 Prepared for
Click to edit Master title style Advanced Military Layers. and the Historic Environment
 Advanced Military Layers and the Historic Environment Paul Baggaley and Louise Tizzard Wessex Archaeology 1 Click to edit Objectives Master title style to establish the degree of mutual benefit in integrating
Advanced Military Layers and the Historic Environment Paul Baggaley and Louise Tizzard Wessex Archaeology 1 Click to edit Objectives Master title style to establish the degree of mutual benefit in integrating
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
OFFSHORE SURVEY IN DEVELOPMENT PROJECTS. Ian Douglas Head, Offshore Surveys, Shell Projects & Technology Europe
 OFFSHORE SURVEY IN DEVELOPMENT PROJECTS Ian Douglas Head, Offshore Surveys, Shell Projects & Technology Europe THE PROJECT: GOLDENEYE GOLDENEYE FACTS ST. FERGUS GOLDENEYE PLATFORM Gas Condensate Field
OFFSHORE SURVEY IN DEVELOPMENT PROJECTS Ian Douglas Head, Offshore Surveys, Shell Projects & Technology Europe THE PROJECT: GOLDENEYE GOLDENEYE FACTS ST. FERGUS GOLDENEYE PLATFORM Gas Condensate Field
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
ACCESS the BLUE ECONOMY ALL OCEANS Engineering Ltd
 Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Sonar Bathymetry: Waquoit Bay NERR
 Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office
 S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004
 Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
An Integrated Marine Gradiometer Array System (MGA)
") An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
Update on Canadian Research Vessels Ship Procurement Projects
 Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Offshore Oil and Gas Platforms for Deep Waters
 Offshore Oil and Gas Platforms for Deep Waters Atilla Incecik Department of Naval Architecture, Ocean and Marine Engineering University of Strathclyde, Glasgow, UK (atilla.incecik@strath.ac.uk) Summary
Offshore Oil and Gas Platforms for Deep Waters Atilla Incecik Department of Naval Architecture, Ocean and Marine Engineering University of Strathclyde, Glasgow, UK (atilla.incecik@strath.ac.uk) Summary
SOP-003 GYRO CALIBRATION AND VERIFICATION PROCEDURE
 Rev No. Issue Description Prepared Reviewed Approved Date 5 Re-issued for use RGM SS RB 17 Aug 15 4 Changes made to procedure AFI JAL JAL 12 Sep 11 3 Re-issued for use RGM RAM MAJ 19 May 11 2 Re-issued
Rev No. Issue Description Prepared Reviewed Approved Date 5 Re-issued for use RGM SS RB 17 Aug 15 4 Changes made to procedure AFI JAL JAL 12 Sep 11 3 Re-issued for use RGM RAM MAJ 19 May 11 2 Re-issued
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Release Performance Notes TN WBMS _R _Release_Presentation.pptx 22 September, 2014
 TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
Dive Operations Plan for Personal Submersibles. Revision
 Dive Operations Plan for Personal Submersibles Revision 2011.1 1 Table of Contents 1 EVENT...3 1.1 Summary of planned dive...3 1.1.1 PSUBS Guidelines...3 1.1.2 Maximum dive depth planned...3 1.1.3 Number
Dive Operations Plan for Personal Submersibles Revision 2011.1 1 Table of Contents 1 EVENT...3 1.1 Summary of planned dive...3 1.1.1 PSUBS Guidelines...3 1.1.2 Maximum dive depth planned...3 1.1.3 Number
Malta Survey activities
 Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
THE MISSING LINK - INSPECTING THE FINAL CRITICAL SECTION OF A LARGE CRUDE TRANSMISSION AND EXPORT SYSTEM
 THE MISSING LINK - INSPECTING THE FINAL CRITICAL SECTION OF A LARGE CRUDE TRANSMISSION AND EXPORT SYSTEM By: Basil Hostage and Dr. Rainer Schmidt, 3P Services, Germany Summary This paper contains a focussed
THE MISSING LINK - INSPECTING THE FINAL CRITICAL SECTION OF A LARGE CRUDE TRANSMISSION AND EXPORT SYSTEM By: Basil Hostage and Dr. Rainer Schmidt, 3P Services, Germany Summary This paper contains a focussed
An accident at sea, such as an
 Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Pile Gripper Systems
 Pile Gripper Systems Accurate positioning and restraint of offshore construction piles + + Accurate handling of piles up to 8.0m in diameter + + Pile positioning and adjustment within large envelopes +
Pile Gripper Systems Accurate positioning and restraint of offshore construction piles + + Accurate handling of piles up to 8.0m in diameter + + Pile positioning and adjustment within large envelopes +
Shearwater GeoServices. Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist
 Shearwater GeoServices Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist Shearwater GeoServices - Full Geophysical Service Company Marine Processing
Shearwater GeoServices Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist Shearwater GeoServices - Full Geophysical Service Company Marine Processing
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements
 Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
from ocean to cloud PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM
 PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
Challenges in determining water surface in airborne LiDAR topobathymetry. Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014
 Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
TRIAXYS Acoustic Doppler Current Profiler Comparison Study
 TRIAXYS Acoustic Doppler Current Profiler Comparison Study By Randolph Kashino, Axys Technologies Inc. Tony Ethier, Axys Technologies Inc. Reo Phillips, Axys Technologies Inc. February 2 Figure 1. Nortek
TRIAXYS Acoustic Doppler Current Profiler Comparison Study By Randolph Kashino, Axys Technologies Inc. Tony Ethier, Axys Technologies Inc. Reo Phillips, Axys Technologies Inc. February 2 Figure 1. Nortek
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
Overview. 2 Module 13: Advanced Data Processing
 2 Module 13: Advanced Data Processing Overview This section of the course covers advanced data processing when profiling. We will discuss the removal of the fairly gross effects of ship heave and talk
2 Module 13: Advanced Data Processing Overview This section of the course covers advanced data processing when profiling. We will discuss the removal of the fairly gross effects of ship heave and talk
ENVIRONMENT AGENCY GREAT OUSE AND 100 FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 SITE SURVEY REPORT NO. H6787
 ENVIRONMENT AGENCY GREAT OUSE AND 100FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 NO. H6787 LONGDIN & BROWNING (SURVEYS) LIMITED CHERRY TREE HOUSE CARMARTHEN ROAD SWANSEA SA1 1HE H6787 1 Measured
ENVIRONMENT AGENCY GREAT OUSE AND 100FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 NO. H6787 LONGDIN & BROWNING (SURVEYS) LIMITED CHERRY TREE HOUSE CARMARTHEN ROAD SWANSEA SA1 1HE H6787 1 Measured
OMS WeldChecker WeldChecker inspection tool Features that can be inspected include: 2007 & 2014 The camera will identify: WELD
 WELD INSPECTION Introducing OMS WeldChecker Pipe Inspection Tools The WeldChecker inspection tool consists of a high resolution camera for visual inspection and a laser sensor to measure features and defects.
WELD INSPECTION Introducing OMS WeldChecker Pipe Inspection Tools The WeldChecker inspection tool consists of a high resolution camera for visual inspection and a laser sensor to measure features and defects.
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL
 AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL Jay Wise 1 ABSTRACT Phillips and Jordan, a leading excavating and disaster recovery contractor, was faced with the challenge to manage a civil contract involving
AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL Jay Wise 1 ABSTRACT Phillips and Jordan, a leading excavating and disaster recovery contractor, was faced with the challenge to manage a civil contract involving
Dynamic Positioning Control Augmentation for Jack-up Vessels
 DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
Bathymetry Data Collection for Subaqueous Soil Mapping. Maggie Payne 2 nd National Workshop on Subaqueous Soils Rhode Island August 9-12, 2010
 Bathymetry Data Collection for Subaqueous Soil Mapping Maggie Payne 2 nd National Workshop on Subaqueous Soils Rhode Island August 9-12, 2010 Overview of Method Collect tide data Collect bathymetry data
Bathymetry Data Collection for Subaqueous Soil Mapping Maggie Payne 2 nd National Workshop on Subaqueous Soils Rhode Island August 9-12, 2010 Overview of Method Collect tide data Collect bathymetry data
Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft
 Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
SHELL FLAGS INSPECTION CASE STUDY
 SHELL FLAGS INSPECTION CASE STUDY J. Nonemaker, Solution Engineer, ROSEN T. Steinvoorte, Business Development, ROSEN R. Subramanian, Pipelines & Subsea Technical Support Engineer, Shell U.K. Limited Introduction
SHELL FLAGS INSPECTION CASE STUDY J. Nonemaker, Solution Engineer, ROSEN T. Steinvoorte, Business Development, ROSEN R. Subramanian, Pipelines & Subsea Technical Support Engineer, Shell U.K. Limited Introduction
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS)
") Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Survey solutions. catalogue DEEP INSIGHT. SHARPER SENSES.
 Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Background Paper: Surveys. Nord Stream 2 AG Sep-17
 Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
INTERNATIONAL HYDROGRAPHIC REVIEW MAY 2015
 OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
Tutorial for the. Total Vertical Uncertainty Analysis Tool in NaviModel3
 Tutorial for the Total Vertical Uncertainty Analysis Tool in NaviModel3 May, 2011 1. Introduction The Total Vertical Uncertainty Analysis Tool in NaviModel3 has been designed to facilitate a determination
Tutorial for the Total Vertical Uncertainty Analysis Tool in NaviModel3 May, 2011 1. Introduction The Total Vertical Uncertainty Analysis Tool in NaviModel3 has been designed to facilitate a determination
FULL SCALE MEASUREMENT OF DYNAMIC SHIP MOTIONS AND SQUAT
 FULL SCALE MEASUREMENT OF DYNAMIC SHIP MOTIONS AND SQUAT Mr. Gary Rolph Chief Hydrographic Surveyor Port of Brisbane Corporation Mr. Peter Rumball Surveyor Port of Brisbane Corporation Dr. Terry O'Brien
FULL SCALE MEASUREMENT OF DYNAMIC SHIP MOTIONS AND SQUAT Mr. Gary Rolph Chief Hydrographic Surveyor Port of Brisbane Corporation Mr. Peter Rumball Surveyor Port of Brisbane Corporation Dr. Terry O'Brien
Products and Services HR3D, AUV3D
 Products and Services HR3D, AUV3D Multi-streamer Short Offset High Resolution 3D Seismic Acquisition Peter Sack Tor Haugland Sound Oceanics, LLC Houston, Texas USA 15 March 2012 Background Petromar V West
Products and Services HR3D, AUV3D Multi-streamer Short Offset High Resolution 3D Seismic Acquisition Peter Sack Tor Haugland Sound Oceanics, LLC Houston, Texas USA 15 March 2012 Background Petromar V West
Tifft Water Supply Symposium
 Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys
 Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys Lisa N. Brisson 1, Damon A. Wolfe 1, Matthew Staley P.S.M. 2 1 EdgeTech 4 Little Brook Rd West Wareham, MA 02576 2 USACE
Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys Lisa N. Brisson 1, Damon A. Wolfe 1, Matthew Staley P.S.M. 2 1 EdgeTech 4 Little Brook Rd West Wareham, MA 02576 2 USACE
MEASUREMENT COMMUNICATION INSIGHT
 Temperature & Depth MEASUREMENT COMMUNICATION INSIGHT CONTENTS Introduction to Aquatec Measuring Temperature and Depth 2 3 Aquatec s Temperature and Depth Loggers AQUAlogger 520 AQUAlogger 530 AQUAlogger
Temperature & Depth MEASUREMENT COMMUNICATION INSIGHT CONTENTS Introduction to Aquatec Measuring Temperature and Depth 2 3 Aquatec s Temperature and Depth Loggers AQUAlogger 520 AQUAlogger 530 AQUAlogger
Marine Renewables Industry Association. Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling
 Marine Renewables Industry Association Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling October 2009 Table of Contents 1. Introduction... 1 2. Measurements
Marine Renewables Industry Association Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling October 2009 Table of Contents 1. Introduction... 1 2. Measurements
Bathyswath Technical Information
 www.bathyswath.com support@bathyswath.com Reference OD-5001 Classification Unclassified Version 7.04 Date July 2013 Copy number N/A (if applicable) Bathyswath Technical Information The information contained
www.bathyswath.com support@bathyswath.com Reference OD-5001 Classification Unclassified Version 7.04 Date July 2013 Copy number N/A (if applicable) Bathyswath Technical Information The information contained