Survey solutions. catalogue DEEP INSIGHT. SHARPER SENSES.
|
|
|
- Charlene McDonald
- 6 years ago
- Views:
Transcription


1 Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES.
2 i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the depths of the ocean to the reaches of outer space. ixblue Offices
3 ixblue Group ixblue is an independent group and a leading global manufacturer of products, integrated solutions and systems for navigation, mapping, control and measurement technologies. ixblue s technologies measure with the greatest precision and afford rapid access to geo-referenced data in complex environments; this empowers our customers to explore, survey and operate their systems, increase their productivity and efficiency and carry out better, faster and safer technical operations. Our Markets Our solutions are used everywhere to ensure the clients operational outcomes are met. In a world that demands a reduced Total Cost of Ownership and improved Return On Investment, ixblue meets these demands serving customers from a diverse range of industries, including defense, surveying, oil and gas, mining, scientific, aerospace, systems integrators and manufacturing. Our Operations Our employees are experts in their fields and work in research and development, marketing, sales, assembly, installation, training and service. With facilities in France, North and South America, the UK, the Netherlands, Germany, Italy, Dubai, China, India, Singapore and Australia, we offer a global 24h service and support to our customers. Our Businesses Our business areas extend over several fields: - Specialty Fibers and components - Inertial Navigation Systems - Motion & Control Systems - Underwater Acoustic Positioning - Sonar Seabed Imagery - Integrated Systems - Ship construction - Survey & Services ixblue s extensive range of products, systems and services work together to supply our customers with the uppermost reliability and efficient solutions.

4

5 ixblue Expertise MOTION SENSING FOR HYDROGRAPHY SUB-BOTTOM PROFILING SEABED MAPPING INTEGRATED SURVEY SOLUTIONS
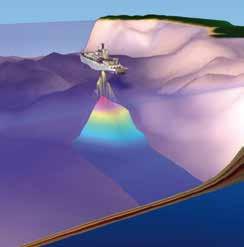
6 motion sensing for HYDROGRAPHY Hydrography is the branch of marine science concerned with the measurement of the topography of the seabed. Hydrographic surveys are generally achieved through the use of single or multibeam echo-sounders georeferenced through inertial navigation system or gyrocompass and motion sensor and GPS. The quality of a hydrographic chart heavily depends on the quality of the motion reference system used during the survey. Since for more than ten years ixblue has become a leading provider of high performance inertial navigation systems and gyrocompass for hydrographic survey.

7 Geo-referencing the soundings An echo-sounder mounted on a ship will move significantly due to the action of wind and waves. Swell will raise and lower the vessel periodically, but will also cause the vessel to pitch and roll. Unless the echosounder is mounted exactly at the centre of rotation of a vessel, pitch and roll will also cause the echo-sounder to move vertically. While a single-beam echo sounder measures one depth value per sonar ping, with a multibeam echo-sounder, a number of depth values are measured within each sonar ping. Depending on the type of multi-beam used, data points may cover a swath of 160 degrees or more. At the extreme edges of the swath, tiny errors in the measurement of the orientation of the vessel can introduce large errors in the measured depth or the position of the soundings. For instance in 300m of water, with a 160 degree swath width, a 0.1 degree error in the orientation of the multi-beam head will introduce nearly 3m of error in the bathymetry. When using a single-beam echo-sounder, accurate heading and motion data is a vital part of the total error budget but when it comes to operating a multibeam echo sounder perhaps the most critical instrument is the motion sensor. Without accurate motion measurement and compensation there is no hope of producing bathymetry data without artifacts.







8 octans hydrins rovins delph ins ixblue gyrocompass and inertial navigation systems are used for the most demanding hydrographic applications to provide accurate motion sensing and compensation. OCTANS - Industry standard Gyrocompass and motion sensor provides heading, roll, pitch and heave at high rate without the need for any external aiding and hence with full independence from GPS. Available in surface or 3000m depth rated subsea housing OCTANS can be installed on a ship, pole mount or on any subsea vehicle. HYDRINS Inertial Navigation System optimized specifically for hydrographic applications provides position and speed in addition to the orientation and heave. Based on a high performance core HYDRINS does not need a twin antenna GPS receiver and it is also robust to GPS dropouts. ROVINS - The latest Inertial Navigation System in a 3000m depth rated subsea housing designed originally for ROV operations, ROVINS is finding more and more use in hydrographic applications, particularly where something a little specialist is required. As for HYDRINS, ROVINS has the full inertial capability and can cope with dropouts of GPS or acoustic positioning systems. Moreover ROVINS can be interfaced to Doppler Velocity Log for full independence of any external positioning reference. DELPH INS - Inertial navigation post processing software. When the absolute best is required from navigation, post processing is usually acknowledged as essential. Compatible with the full range of ixblue inertial navigation systems, DELPH INS provides powerful data editing and processing functions together with data export capability making it the ideal tool for quick and easy navigation enhancement

9 fiber optic gyroscope technology Building from pioneering work in the eighties, ixblue has become a world leader in high performance fiber-optic gyroscope. At the heart of ixblue gyrocompass and inertial navigation systems is the fiber-optic gyroscope: a rotation sensing device based on the Sagnac effect; a relativistic effect discovered at the beginning of the 20th century. In a fiber-optic gyroscope, light from a semiconductor laser is split and launched into both ends of a loop of optical fiber. The beams traverse the loop in opposing directions before recombining into an interference pattern from which the rotational rate of the loop can be read thanks to the Sagnac effect. In practice, multiple loops of fiber are used to form the optical circuit within a continuous coil: the more loops within the coil, the longer the light circuit, the greater the Sagnac effect and the more sensitive the device. Based on the same general principle as their cousins the ring-laser gyroscopes, the fiber-optic gyroscopes exhibit many advantages for high precision, high reliability applications. Notably the fiber-optic gyroscopes have an intrinsically very low noise allowing the best performance to be reached at the system level in a very short time.they are also a completely passive device with no mechanical dithering, no sealed cavity and no high current electric discharge which leads to unrivalled lifetime and reliability. Due to their characteristics ixblue fiber-optic gyroscope is now the choice technology for the most complex applications: from space to deep sea.

10 hydrography Specific applications copyright 2012 AeroWest Pole mounted systems. It is common to mount a multi-beam echo-sounder on an overthe-side or moon pool mounted pole. With an over-the sidepole, flexing and vibration of the pole and mounting brackets is inevitable, whilst with a moon pool mounted system, the registration of the pole within the moon pool is often not repeatable. In traditional configurations, the motion sensor is mounted close to the centre of rotation of the vessel. This can be some tens of meters away from the multi-beam system, aluminium and even steel vessels will flex under stress (motion) and the over-the-side pole will bend under the stress of water flow. Moon pool mounted poles will vibrate due to the turbulence cause by the vessel motion. With modern multibeam and motion sensing equipment these movements are now a significant portion of the error budget. By utilising ROVINS mounted very close to the multi-beam system and on the same pole, the sensor is subjected to the same motion as the multi-beam. With the new heave algorithms and the ability to set a leaver arm within ROVINS to the centre of rotation of the vessel, there is now no need to mount the motion sensor remotely from the multi-beam. The ROVINS is not only able to measure the exact heading and motion experienced by the multi-beam, but will even calculate a position 200 times per second, taking in to account the exact motion of the end of the pole, not the average motion of the ship. Integrated Lidar Systems By utilizing the best in inertial navigation systems it is possible to integrate full coverage multi-beam with laser based mapping systems on the same survey launch, collecting data covering subsea and surface structures in a single pass. HYDRINS is extensively used in this application for mapping ports and harbors both above and below the water.

11 High Latitudes With every gyroscope ever built, navigating at high latitudes has been a problem. As the sensor approaches the North pole, the problem of detecting the exact direction of north becomes more and more difficult. Imagine the situation where a gyroscope is installed exactly on the north pole: where is north? Every direction is south! ixblue has extensive experience of working at high latitudes with inertial systems. In 2009 an AUV equipped with a PHINS Inertial Navigation system was able to navigate autonomously for 450km under ice at 86 degrees north. ixblue has developed custom algorithms to deal with the problems of navigating at high latitudes and continues to develop techniques and algorithms to allow even higher performance. Structures / Bridges When surveying under bridges or close to structures, GPS cannot be relied on, satellites get masked entirely, or even worse, reflected off those structures leading to erroneous readings from the GPS receiver. Inertial navigation systems are able to detect spikes on GPS data and exclude them from the navigation calculation. Positioning noise is reduced whilst position and attitude data is available at up to 200 times per second. Sometimes errors in configuration or particularly prolonged periods of poor aiding data can affect the inertial calculation. In this case, DELPH INS may be used to re-process the data, optimizing settings, and using advanced techniques to improve on the results that are possible in real time. Tunnels The use of ROVINS or PHINS interfaced to a DVL will allow surveys to be conducted for kilometres at a time with no GPS aiding. The position produced by a ROVINS interfaced to DVL will drift up to 2 m over 1 km, with PHINS the drift is reduced to 1 m over 1 km. By utilizing DELPH INS these position drifts may be reduced even more through post processing. DELPH INS is capable of performing the inertial calculation both forwards and backwards in time. The results of these two calculations are merged, at the level of speed, orientation and calculated position. The final solution is far more accurate than simply averaging the position over the two passes.

12 Sub-bottom profiling ixblue provides sub-bottom profilers with a range of frequencies and designs to cover the whole spectrum of applications. Based on more than 30 years experience in low frequency transducers designs and processing software development, our systems are turn-key solutions providing the best compromise on penetration and resolution for any applications with the highest data quality. What is a sub-bottom profiler? Sub-bottom profilers are powerful low frequency echosounders that provide profiles of the upper layers of the ocean bottom. They map the ocean bottom by generating powerful focused beams toward the sea bottom. Echoes from surfaces or the horizons between different geological layers are returned and recorded by the profiler and the sequence of deposition and subsequent erosion can be recorded. A map of the ocean bottom is generated by stacking the echoes recorded along the track of the carrier. Sub-bottom profiling differs from seismic reflection in that higher frequencies are used to obtain thinner vertical resolution and pulse modulation chirp is used to bring an additional gain to data. Sub-bottom profiling is used to conduct soil investigation campaigns for dredging and construction projects, for route surveys, pipeline and cable laying projects, to search for mineral resources and to conduct geological and geophysical exploration. Sub-bottom profiling is used by marine archaeologists to detect wrecks and deposits below the surface of the sea floor.

13 Resolution versus penetration tradeoff The choice of a sub-bottom profiler is a tradeoff between resolution, penetration and signal quality requirements. The penetration is the capacity to scan the seabed layer in depth. It is linked to the amount of reflected energy after the signal traveled through the successive sediment layers. To increase the penetration it is necessary either to send energy more through water, which very soon leads to technological limitations, or to use lower acoustic frequencies to minimize the absorption loss in the medium. The resolution is the capacity to discriminate and hence classify details of the seabed structure. It is inversely proportional to the bandwidth of the emitted signal. To improve the resolution it is necessary to increase the bandwidth and hence the frequency of the signal. Since a higher of penetration requires a lower signal frequency while the better of resolution requires a higher signal frequency, a tradeoff is necessary. Compared to traditional boomers and sparkers acoustic sources, the piezo-electric based technology of ECHOES profiler allows much better resolution while keeping a very high penetration and equivalent power source through the use of pulse compression technique which is possible thanks to the perfect control of the signal. Moreover the design of the analog electronics together with the flatness of our transducers bandwidth guarantees an optimal signal quality even for the lowest frequency bands.

 middle resolution (40cm) applications, it is a perfect tool for engineering")

 together with its high penetration makes it the preferred tool for seismic or geological")


14 ECHOES 1500 ECHOES 3500 ECHOES 5000 ECHOES ECHOES high resolution sub-bottom profilers To cope with the requirements of all applications, the ECHOES family covers a wide range of frequencies and design from 500Hz Janus-Helmholtz type to 15kHz Tonpilz type. ECHOES 1500 is a low frequency wide bandwidth (500Hz to 2500Hz) towed sub-bottom profiler. Designed for high penetration (several hundreds of meters) middle resolution (40cm) applications, it is a perfect tool for engineering geophysics, foundation investigation, aggregate and offshore mining as well as continental shelf geophysical investigation. It is available as a towed fish system rated to 6000m. ECHOES 5000 is a middle frequency very wide bandwidth (2000Hz to 10000Hz) towed Sub-bottom profiler. Its impressive resolution (22 to 17cm) together with its high penetration makes it the preferred tool for seismic or geological surveys and sediment classification. It is available pole mount, as a tow fish rated to 6000m and in a specific AUV modular design. ECHOES is the higher frequency member of the family. With Hz bandwidth from 5000 Hz to Hz it offers unrivaled true resolution (8cm). Thanks to its small size and versatility it is a perfect tool for shallow water, port and coastal surveys. ECHOES 3500 is a hull-mounted sub-bottom profiler based on a mono-antenna design. Thanks to its bandwidth (1700Hz to 5500Hz), it offers a good compromise between penetration and resolution (20cm). ECHOES 3500 is the reference system for permanent installation on oceanographic ships allowing full ocean depth seabed scanning.


15 low frequency wide band transducer High efficiency, large bandwidth, low dispersion transducers It s the motor! The use of chirp technology requires perfectly controlled transmission to allow high pulse compression quality. Optimal transducers must have: 1) high efficiency 2) large bandwidth 3) low dispersion on the bandwidth (which yields wellcontrasted sediment profiles). These three requirements are generally incompatible since a high efficiency yields high quality factors and therefore a small bandwidth. To overcome those limitations, we use coupled resonators driven by compensation stage impedance matching circuit. Developed over more than 30 years for defense, scientific and survey applications, our transducers are, one of two different kinds: Flapping Tonpilz is made of pre-stressed piezoelectric stack ( the motor ) acting as a dilatation/ compression resonator, a tail mass concentrates energy in one direction of space and a flapping tail mass provides the second coupled resonance. Janus-Helmholtz that couples the double-tonpilz dilatation/compression resonance with the cavity resonance (Helmholtz resonance) of the fluid cavity encapsulated in circular baffle. These two technologies, driven by compensation stage impedance matching circuit yields bandwidth of 100% of the central frequency and transmission chain electro-acoustic power efficiency of more than 60%. Moreover our Janus-Helmholtz transducers are full ocean depth (up to 6000m) which allows more than 60dB (factor 1000) of transmission losses reduction in one thousand meter depth tow configuration. For specific needs ixblue has the capacity to develop transducer on demand.

16 sub-bottom profilers applications Ports and Harbours Where routine imaging of sediment infill is required, ECHOES is ideal, easily mounted on a small survey launch and providing very high resolution images of soft sediments. For construction work the ECHOES 5000 may be pole or hull mounted on a small survey launch or even towed behind on a soft tow cable. Penetration will be significantly greater than with the ECHOES 10000, and the resolution of 22 to 17cm will be more than adequate for foundation design. Archaeology When it comes to archaeological work the highest resolution possible is desirable: ECHOES 10000, with its 8cm resolution, is ideal for this type of survey. Foundations For foundation work, deep penetration is generally more important than resolution. If hull mounting is desirable then the ECHOES 3500 is a good choice for foundation work. If hull mounting is not an option, or deeper penetration is required then ECHOES 1500 in a surface or deep tow configuration will produce the penetration that is needed with a resolution of 40 cm. Rig Site Surveys For rig site survey work, a combination of sensors is recommended. Survey vessels engaged in this kind of work need to cover a wide geographical area with water depths ranging from very shallow to two or three thousand meters. By selecting a range of sub-bottom profilers these vessels can be permanently ready for any job in any water depth. ECHOES 3500 will produce data with penetration and resolution far superior to the standard hull mounted pingers in wide use throughout the industry. Having the ECHOES 3500 hull mounted gives reliable penetration in all but the worst weather conditions. Extending the weather conditions that a survey vessel is capable of working in can have a significant impact on the time taken to complete a survey. ECHOES 1500 in its towed configuration is an ideal replacement for surface towed boomers or sparkers, producing high resolution deep penetration data even in weather conditions that would cause surface tow boomer or sparker systems to be unusable. In cases where resolution is more important than penetration, then ECHOES 5000 deep tow system has the same weather tolerance as the ECHOES 1500, but will produce higher resolution images of the top sediment layers.

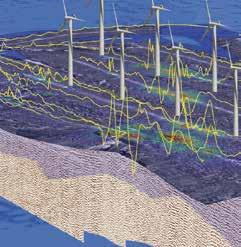
17 UNCLOS Surveys The surveys required to back up an UNCLOS (United Nations Convention on the Law of the Sea) claim the need to define the outer edge of the continental margin. The continental margin is the area between the continental shelf and the abyssal plane and consists of the continental slope with the flatter continental rise at the bottom. Sediment from the continent above flows down the continental slope and accumulates at the bottom to create the continental rise. High resolution mapping of the deep sediment layers on both the continental slope and the continental rise are essential in backing up claims made under the UNCLOS. Hull mounted sub bottom profilers are essential for UNCLOS surveys. Large areas must be covered with multi-beam and subbottom profiling. By using the ECHOES 3500 combined with a suitable low frequency multi-beam echo sounder vessels can survey at higher speeds than would be possible while towing equipment. Wind farms Wind farms are now being constructed that are orders of magnitude larger than any that have been built previously. This is only possible by moving further offshore in to deeper water. Where weather conditions start to determine the ability of a vessel to conduct a survey. With survey areas now measuring in the thousands of square kilometres, reliable efficient survey methods are essential. The magnitude of swell that a vessel is able to operate in determines the number of days a year on any particular site that survey operations are possible. Increasing the operating window of a vessel by just 1m of swell has an enormous impact on the productivity and hence the total time required to conduct these vast surveys. With a combination of ECHOES 3500 and OCTANS for heave compensation, deep penetration high resolution data will be achievable in most weather conditions. When geological conditions impose a lower frequency system ECHOES 1500 towed well below the surface swell will produce deep penetration even in the most difficult of conditions.

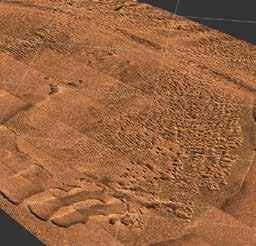
18 Seabed Mapping Mapping of the surface of the seabed may be required for any number of reasons from geology to archeology, through route survey, debris clearance, habitats mapping, etc. Depending on the purpose of the survey, and the water depth, different techniques may be employed, the main techniques being side-scan sonar with some magnetic based survey in specific applications Side-Scan Sonar range resolution limitations Side-scan sonars are designed for the rapid production of images of large areas of the sea floor. A side-scan sonar emits a conical acoustic pulse down toward the seafloor across a wide angle perpendicular to the path of the sensor through the water, which is generally towed from a surface vessel. The intensity of the acoustic reflections from the seafloor of this conical beam is recorded in a series of cross-track slices. When stacked together along the direction of motion, these slices form an image of the sea bottom within the swath (coverage width) of the beam. In a side-scan sonar, the beam of the sonar across track widens as it gets further from the transducer. Hence in traditional side-scan sonars, the higher the range, the lower the resolution. To keep the quality of the images and a good resolution at long ranges it is necessary to lengthen the size of the sonar antenna and to use higher frequency signals which produce thinner beams for a given antenna length.

19 Since the high frequency acoustic signals are strongly attenuated in the water, the traditional side-scan sonars have range-resolution limitations: any increase in range is obtained at the cost of a lower resolution. Georeferenced seabed images A common rule of thumb for operating side-scan sonar is that the sonar should be positioned at an altitude above the seabed of 10% of the image range. In order to keep the sonar towfish at the correct depth it is common to use an armored tow cable and a winch. Because of the hydrodynamic resistance to the cable and towfish passing through the water, this type of configuration usually leads to around 3 times the water depth of cable between the towfish and the towing vessel. Positioning of the sonar towfish becomes a problem in any but the shallowest of water depths. The distance behind the vessel of the towfish varies with the speed of the vessel and the amount of cable deployed, and the distance to port or starboard of the track varies with the currents and tides. Ultra Short Base Line positioning is the traditional method for positioning a sonar towfish. Combined with recent advances in inertial navigation brings new possibilities to the field.

20 synthetic aperture mapping sonar technology Combining the return signal from these acoustic recurrences and taking into account the movement of the sonar to correct the phases, it is possible to form a synthetic reception antenna the length of which is equal to the displacement of the sonar antenna from the first recurrence to the last. In 2006 ixblue brought to the industry the Synthetic Aperture Mapping Sonar technology. The Synthetic Aperture Mapping Sonar solves the range resolution dilemma of traditional side-scan sonar improving drastically the productivity of seabed mapping surveys. The principle of Synthetic Aperture Sonar (SAS) is to combine successive pings coherently along the track in order to increase the azimuth resolution. At each acoustic recurrence a wide emission beam is generated by the system and the return signal on a plurality of receivers along the reception antenna are recorded. Since the emission beam is wide, the same area is illuminated during several acoustic recurrences. Using this principle, the resolution of the sonar is no longer limited by the size of the physical antenna. The further away the point to image, the longer the synthetic antenna is to get that image. Hence the resolution of the sonar is constant across-track and the resolution is not degraded at high ranges. Since the size of the formed synthetic antenna is much longer than the size of any realistic acoustic side-scan sonar antenna the resolution at very high range is still much better than the resolution of comparable traditional side-scan sonar.
 at up to 5knots and a full distortion free geo-referenced image.")
21 high productivity mapping sonar shadows SHADOWS synthetic aperture sonar SHADOWS is a synthetic aperture sonar towfish designed for shallow to mid-water applications up to 300m deep. SHADOWS gives «more pixels per hour» and reduces survey time and risk. It provides 15cm resolution images at full swath (600m) at up to 5knots and a full distortion free geo-referenced image. Integrated with a PHINS inertial navigation system, aided by onboard DVL and an acoustic beacon, it offers «target localization» and data in real time. Thanks to its gap-filler forward sonar, there is no gap at nadir and no need to survey several lines to provide overlap and complete coverage the same area to fill the side-scan gap. Thanks to its integrated INS and robustness of design SHADOWS can be used in rough sea conditions when other sonars are unable to operate. SHADOWS is the perfect solution for shallow and mid-water survey where productivity and resolution are needed.

,")
22 SAMS DT6000 deep towed high resolution mapping sonar SAMS-DT6000 deep towed synthetic aperture mapping sonar In deep water the swath/resolution dilemma of traditional side-scan sonars is even more acute than in shallow water. The towing speed of deep water tow fish is limited to a few knots because of the strain or the towing cable. Hence the only way to increase the coverage rate is to use low frequency/long range lateral sonars which result in very poor resolution of the produced images (typically 30m per pixel and up to 70m). Based on a low frequency lateral synthetic aperture sonar and integrating a multi-beam sonar and a full inertial acoustic positioning and navigation system (PHINS 6000 and POSIDONIA 6000), SAMS-DT6000 brings the best of ixblue technologies to the deep seas with 50cm resolution geo-referenced images on a swath of up to1500m with no gap at nadir, up to 6000m depth. Designed with real operations constraints in mind, SAMS-DT 6000 also integrates a full safety system as already used on other deep towed systems delivered by ixblue. For archeological, geological, mining and route surveys, SAMS-DT 6000 allows covering very large survey areas with the best efficiency thanks to its high coverage rate / high resolution capability.


23 gaps posidonia II phins 6000 Talking about geological and mapping surveys it is as important to get the right data as to be able to locate the collected data. ixblue Ultra-Short Base Line systems provide accurate and reliable position of subsea vehicles whether towfish, ROV or Autonomous Underwater Vehicles. Combined with ixblue inertial systems they provide the ultimate performance for subsea vehicles tracking and motion sensing. GAPS The Ultra Short Base Line system includes an Inertial Navigation System in its acoustic head which allows it to be pre-calibrated and extremely accurate. Its 3-D hydrophone head and robust signal processing result in the widest antenna aperture allowing the tracking of targets horizontally even in the shallowest water. With its 4,000m range capability GAPS is also excellent for tracking fish operating in water depths up to 1500m. POSIDONIA II The Low frequency Ultra Short Base Line system allows high accuracy/ultra-long range tracking of subsea vehicle. With its new electronic cabinet (USBL-BOX), the interfacing becomes simple while the robustness of the performance is again increased. With its 8,000 range capability POSIDONIA II is the choice solution for deep tow fish tracking. PHINS The Inertial Navigation System optimized for the most complex applications and especially for subsea applications. PHINS interfaces with USBL, Long Base Line systems, ixblue RAMSES, as well as Doppler Velocity Log and GPS when on surface. Used in most high performance AUVs, PHINS is also available in a 6,000m depth rated subsea housing for towfish and ROV applications.
24 Data acquisition & interpretation Based on 20 years solid experience, DELPH Geophysical software solves industry bottlenecks by bringing down the time and cost of geophysical data processing and mapping with a focus on the quality of the final result. This new software generation optimizes the workflows allowing real-time data interpretation during the acquisition process. Designed in a collaborative approach with key users they fit the market specifications and increase productivity. The better/smarter tools for geophysicists, the multi-sensor data integration and QC at all levels improve the level of the deliverable final report of any type of survey. DELPH Acquisition software is a unified data logging solution to safely monitor and record side-scan sonar, seismic, and sub-bottom profiler, data in a resolutely simplified user-interface. It focuses on reliability and online Q.C. DELPH Interpretation software efficiently turns geophysical data into geographic information layers that seamlessly integrate in DELPH 3D geographic visualization or any other geographical information system. The common user interface and global viewer approach to handle sonar and sub-bottom data brings the user a dedicated tool to process and analyze data with a major gain in productivity. With DELPH, forget about the traditional scrolling approach, directly access data on any scale, always geo-referenced.





25 delph seismic delph sonar delph mag locator DELPH Seismic is the most complete acquisition, processing and interpretation software package designed to provide geologists and geophysicists with easy access to ALL data collected from high resolution seismic systems and sub-bottom profilers. It is the ideal solution for use in all types of surveys. DELPH Mag Locator is a unique operational solution for the mapping of buried objects: in a few comprehensive steps, it filters and maps magnetic anomalies. Although requiring no prior expertise in magnetic science, it provides an accurate magnetic anomaly map to locate magnetic sources. DELPH Sonar is a complete acquisition, processing and interpretation software designed to easily perform accurate and productive side-scan sonar surveys. Providing an optimal Q.C. at any stage and relying on a powerful workflow and ease-of-use, side-scan sonar mapping has never been so fast.

26 seabed mapping applications Debris clearance / wind farms. SHADOWS is ideal for platform debris clearance surveys, capable of covering the whole 500m zone around a platform with two survey lines. The ability to cover this area whilst not needing to approach the platform closer than 250m is a significant safety benefit. The high coverage rate of more than 5km 2 per hour makes SHADOWS the ideal tool for any large area debris clearance survey. Even small objects can be detected with the 15cm resolution. Wreck search When searching a large area for a single missing object, whether it be a wreck or a downed aircraft, SAMS is unprecedented in its ability to cover enormous areas at high resolution even in very deep water. With its 1,500m swath and high resolution of 0.5m even small items of debris can be identified. Coverage of 7km 2 per hour equates to more than 1000km 2 in a week. SAMS is positioned through the combination of POSIDONIA long range USBL and a PHINS inertial navigation system. This method is not just limited to SAMS, ixblue has extensive experience in augmenting existing deep water tow vehicles with the PHINS POSIDONIA navigation solution.

27 Magnetometer surveys An alternative approach for debris search, particularly when small munitions are a concern, is to survey with a magnetometer. Since magnetometers need to be towed far behind the vessel to be clear of influences in the local magnetic field, the majority of magnetometer surveys involve almost horizontal tracking geometry, causing problems for most USBL systems. GAPS USBL is ideal for this kind of operation. The 200 degrees aperture of GAPS means that even in the shallowest water effective tracking of one or more magnetometers towed well behind the vessel is possible. DELPH MAG LOCATOR acquisition and processing software is capable of producing accurate magnetic anomaly maps with no need for prior experience of magnetic mapping from the operator. DELPH 3D data viewer integrates magnetic anomaly maps with sonar mosaics and sub-bottom profiles to allow quick and accurate interpretation of magnetic anomalies. Route surveys SHADOWS and SAMS-DT6000 bring new possibilities to the methodology of route surveys. Typically, what is required for a route survey is a 500m corridor showing any potential seabed obstructions, combined with sediment morphology and bathymetry information along the centre of the route corridor. All this is possible with a single survey pass using SHADOWS, a hull mounted ECHOES 3500 and a multi-beam echo sounder. SAMS is able to provide all this information in a single towfish configuration right down to full ocean depth.

28 Integrated Survey Solutions Integrated survey solutions Building on our knowledge of the survey world, and on our unique range of high-performance products and components, we design high-performance integrated survey solutions specifically tailored to our customers needs. Based on ixblue in-house products and on third party equipment, our solutions are defined in close cooperation with the customers project team. Our solutions range from a standard assembly to a full survey ship through taylor-made system including custom developments and features. More information on ixblue capability for integrated system is provided in the dedicated brochure. courtesy of D.O.R.D, Japan

29 Echoes 1500 tow fish with Phins 6000 and GAPS positioning system

30

31
32 EMEA AMERICAS : APAC : BRO-SURVSOL DEEP INSIGHT. SHARPER SENSES.
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
from ocean to cloud PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM
 PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Recommended operating guidelines (ROG) for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:
 for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:") Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY
 THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
An Integrated Marine Gradiometer Array System (MGA)
") An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements
 Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Hydrographic Surveying at The Port of London
 Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS
 SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
Background Paper: Surveys. Nord Stream 2 AG Sep-17
 Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE
 PRESENTATION HYDRO 17 15/11/2017 CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE Jana De Cuyper - MSc Geology Conor Davidge - BSc Ocean Exploration
PRESENTATION HYDRO 17 15/11/2017 CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE Jana De Cuyper - MSc Geology Conor Davidge - BSc Ocean Exploration
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Malta Survey activities
 Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
INTERNATIONAL HYDROGRAPHIC REVIEW MAY 2015
 OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
LiDAR My favourite tool in the bag 2011 St Kitts & Nevis
 LiDAR My favourite tool in the bag 2011 St Kitts & Nevis Lt Cdr Rupert Forester-Bennett RN (ret d) December 5 th to 11 th 2011 Content Collection of geospatial data reasons Overcoming the White Ribbon
LiDAR My favourite tool in the bag 2011 St Kitts & Nevis Lt Cdr Rupert Forester-Bennett RN (ret d) December 5 th to 11 th 2011 Content Collection of geospatial data reasons Overcoming the White Ribbon
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Offshore Wind Energy Stringent quality assurance and quality control. Coastal and Freshwater Fast responding and flexible organisation
 Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping
 Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004
 Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
STOPPING THE UNDERWATER DIVER THREAT
 STOPPING THE UNDERWATER DIVER THREAT Dr. Robert F. De La Croix and Mr. Juergen G. Keil A non-lethal, scalable deterrent solution Updated from original article published in Maritime Technology Reporter,
STOPPING THE UNDERWATER DIVER THREAT Dr. Robert F. De La Croix and Mr. Juergen G. Keil A non-lethal, scalable deterrent solution Updated from original article published in Maritime Technology Reporter,
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Sonar Bathymetry: Waquoit Bay NERR
 Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
Certified Professionals in Hydrographic Solutions
 Certified Professionals in Hydrographic Solutions Client Satisfaction is our Deliverable Port of Brisbane Pty Ltd Port Surveys Certified Professionals in Hydrographic Surveying Tel +61 (0) 7 3258 4820
Certified Professionals in Hydrographic Solutions Client Satisfaction is our Deliverable Port of Brisbane Pty Ltd Port Surveys Certified Professionals in Hydrographic Surveying Tel +61 (0) 7 3258 4820
Regional Hydrographic Research, Studies & Projects
 Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Failure of Wide Bay Pipeline in the Burnett River
 APGA Paper Date: 29 August 2015 Subject: Risk Mitigation for Trench Pipeline Under Shallow River Crossings Prepared by: Derek Boo Manager Planning and Engineering Company: APA Group Background: Beginning
APGA Paper Date: 29 August 2015 Subject: Risk Mitigation for Trench Pipeline Under Shallow River Crossings Prepared by: Derek Boo Manager Planning and Engineering Company: APA Group Background: Beginning
MARINE NAVIGATION LESSON PLAN See That Sound?
 Marine Navigation Hydrography Lesson Plan MARINE NAVIGATION LESSON PLAN See That Sound? Theme Hydrographic Survey Links to Overview Essays and Resources Needed for Student Research http://oceanservice.noaa.gov/topics/navops/hydrosurvey/
Marine Navigation Hydrography Lesson Plan MARINE NAVIGATION LESSON PLAN See That Sound? Theme Hydrographic Survey Links to Overview Essays and Resources Needed for Student Research http://oceanservice.noaa.gov/topics/navops/hydrosurvey/
Challenges in determining water surface in airborne LiDAR topobathymetry. Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014
 Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Body Search and Recovery Using Sonar
 Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Wind measurements that reduce electricity prices
 Wind measurements that reduce electricity prices Extensive testing in three countries has proven that laser measurements of wind provide precise, reliable wind data. The research findings will make it
Wind measurements that reduce electricity prices Extensive testing in three countries has proven that laser measurements of wind provide precise, reliable wind data. The research findings will make it
H ydrog ra p h ic S urve y Using SEABAT
 H ydrog ra p h ic S urve y Using SEABAT Hirokazu Mori, Tadashi Yamamoto and Isao Tedokon, Hydrographic Department, Japan Coast Guard The original was written in 1999, and our hydrographic surveys using
H ydrog ra p h ic S urve y Using SEABAT Hirokazu Mori, Tadashi Yamamoto and Isao Tedokon, Hydrographic Department, Japan Coast Guard The original was written in 1999, and our hydrographic surveys using
Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft
 Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
Tifft Water Supply Symposium
 Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
Multibeam and Laser: Combined High Resolution. Hydrographic Surveying for Civil Engineering Project Support
 Multibeam and Laser: Combined High Resolution Hydrographic Surveying for Civil Engineering Project Support John Dillon-Leetch,Port of London Authority Duncan Mallace, NetSurvey, UK Overview Introduction
Multibeam and Laser: Combined High Resolution Hydrographic Surveying for Civil Engineering Project Support John Dillon-Leetch,Port of London Authority Duncan Mallace, NetSurvey, UK Overview Introduction
Shearwater GeoServices. Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist
 Shearwater GeoServices Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist Shearwater GeoServices - Full Geophysical Service Company Marine Processing
Shearwater GeoServices Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist Shearwater GeoServices - Full Geophysical Service Company Marine Processing
An accident at sea, such as an
 Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Digiquartz Water-Balanced Pressure Sensors for AUV, ROV, and other Moving Underwater Applications
 Digiquartz Water-Balanced Pressure Sensors for AUV, ROV, and other Moving Underwater Applications Dr. Theo Schaad Principal Scientist Paroscientific, Inc. 2002 Paroscientific, Inc. Page 1 of 6 Digiquartz
Digiquartz Water-Balanced Pressure Sensors for AUV, ROV, and other Moving Underwater Applications Dr. Theo Schaad Principal Scientist Paroscientific, Inc. 2002 Paroscientific, Inc. Page 1 of 6 Digiquartz
GNSS Technology for the Determination of Real-Time Tidal Information
 GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
MOTUS Wave Buoys. Powered By the Aanderaa MOTUS Directional Wave Sensor
 MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006)
") ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
SOP-028 SUB-BOTTOM PROFILER OPERATIONS PROCEDURE
 SOP-028 SUB-BOTTOM PROFILER OPERATIONS PROCEDURE Rev No. Issue Description Prepared Reviewed Approved Date 1 Re-issued for use JAL JPV GF 25 May 11 0 Issued for use JAL JPV GF 28 Feb 11 P1 Prepared for
SOP-028 SUB-BOTTOM PROFILER OPERATIONS PROCEDURE Rev No. Issue Description Prepared Reviewed Approved Date 1 Re-issued for use JAL JPV GF 25 May 11 0 Issued for use JAL JPV GF 28 Feb 11 P1 Prepared for
REMOTE SENSING APPLICATION in WIND ENERGY
 REMOTE SENSING APPLICATION in WIND ENERGY Siraj Ahmed Professor & Head Department of Mechanical Engineering Maulana Azad National Iinstitute of Technology Bhopal, India sirajahmed@manit.ac.in Contents
REMOTE SENSING APPLICATION in WIND ENERGY Siraj Ahmed Professor & Head Department of Mechanical Engineering Maulana Azad National Iinstitute of Technology Bhopal, India sirajahmed@manit.ac.in Contents
Processing Lidar Data for Charting Applications Understanding the Trade-Offs and Challenges
 Processing Lidar Data for Charting Applications Understanding the Trade-Offs and Challenges A variety of acoustic and optical technologies are able to be used to survey shallow water areas. Due to the
Processing Lidar Data for Charting Applications Understanding the Trade-Offs and Challenges A variety of acoustic and optical technologies are able to be used to survey shallow water areas. Due to the
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Review and Classification of The Modern ROV
 Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Level MEASUREMENT 1/2016
 Level MEASUREMENT 1/2016 AGENDA 2 A. Introduction B. Float method C. Displacer method D. Hydrostatic pressure method E. Capacitance method G. Ultrasonic method H. Radar method I. Laser method J. Level
Level MEASUREMENT 1/2016 AGENDA 2 A. Introduction B. Float method C. Displacer method D. Hydrostatic pressure method E. Capacitance method G. Ultrasonic method H. Radar method I. Laser method J. Level
WindProspector TM Lockheed Martin Corporation
 WindProspector TM www.lockheedmartin.com/windprospector 2013 Lockheed Martin Corporation WindProspector Unparalleled Wind Resource Assessment Industry Challenge Wind resource assessment meteorologists
WindProspector TM www.lockheedmartin.com/windprospector 2013 Lockheed Martin Corporation WindProspector Unparalleled Wind Resource Assessment Industry Challenge Wind resource assessment meteorologists
Advanced Test Equipment Rentals ATEC (2832) OMS 600
 OMS 600") Established 1981 Advanced Test Equipment Rentals www.atecorp.com 800-404-ATEC (2832) OMS 600 Continuous partial discharge monitoring system for power generators and electrical motors Condition monitoring
Established 1981 Advanced Test Equipment Rentals www.atecorp.com 800-404-ATEC (2832) OMS 600 Continuous partial discharge monitoring system for power generators and electrical motors Condition monitoring
Release Performance Notes TN WBMS _R _Release_Presentation.pptx 22 September, 2014
 TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
INNOVATIVE MOORING SYSTEMS
 INNOVATIVE MOORING SYSTEMS VESSEL AUTOMOORING MODULES QUAY AUTOMOORING INSTALLATIONS DOCKLOCK brings mooring to a next level PAGE 2 FOR OVER A CENTURY THE WORLD S LEADING EXPERT IN MOORING, BERTHING AND
INNOVATIVE MOORING SYSTEMS VESSEL AUTOMOORING MODULES QUAY AUTOMOORING INSTALLATIONS DOCKLOCK brings mooring to a next level PAGE 2 FOR OVER A CENTURY THE WORLD S LEADING EXPERT IN MOORING, BERTHING AND
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS
 INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
Survey of Underwater NDT Technologies for Offshore Assets
 Survey of Underwater NDT Technologies for Offshore Assets Ayman Amer, Fadl Abdellatif, Ali Outa, Hassane Trigui, Sahejad Patel, Ameen Obedan, Fernando Diaz Ledezma, Hamad Al Saiari and Ihsan Taie, Saudi
Survey of Underwater NDT Technologies for Offshore Assets Ayman Amer, Fadl Abdellatif, Ali Outa, Hassane Trigui, Sahejad Patel, Ameen Obedan, Fernando Diaz Ledezma, Hamad Al Saiari and Ihsan Taie, Saudi
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE.
 EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
Distributed Acoustic Sensor for Oil and Gas
 Distributed Acoustic Sensor for Oil and Gas :Distributed Acoustic System Standard Communications Fiber The entire system consists of only two parts: a standard communications fiber that is positioned on
Distributed Acoustic Sensor for Oil and Gas :Distributed Acoustic System Standard Communications Fiber The entire system consists of only two parts: a standard communications fiber that is positioned on
Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys
 Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys Lisa N. Brisson 1, Damon A. Wolfe 1, Matthew Staley P.S.M. 2 1 EdgeTech 4 Little Brook Rd West Wareham, MA 02576 2 USACE
Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys Lisa N. Brisson 1, Damon A. Wolfe 1, Matthew Staley P.S.M. 2 1 EdgeTech 4 Little Brook Rd West Wareham, MA 02576 2 USACE
Where are the Bathymetric Hot-Spots?
 Where are the Bathymetric Hot-Spots? Dave Monahan Center for Coastal and Ocean Mapping University of New Hampshire If I win really BIG at the Casino tonight Every now and then, there are news stories of
Where are the Bathymetric Hot-Spots? Dave Monahan Center for Coastal and Ocean Mapping University of New Hampshire If I win really BIG at the Casino tonight Every now and then, there are news stories of
Hydrographic Surveying Methods, Applications and Uses
 Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
State of the Art Mapping of Portland Harbour - August 2004
 State of the Art Mapping of Portland Harbour - August 2004 In 2003 and 2004, as part of the "Diving with a Purpose" initiative the Nautical Archaeology Society mapped some of the wrecks in and around Portland
State of the Art Mapping of Portland Harbour - August 2004 In 2003 and 2004, as part of the "Diving with a Purpose" initiative the Nautical Archaeology Society mapped some of the wrecks in and around Portland
Data Collection and Processing: Elwha Estuary Survey, February 2013
 Data Collection and Processing: Elwha Estuary Survey, February 2013 Ian Miller, WA Sea Grant Olympic Peninsula Field Office, 1502 E. Lauridsen Blvd #82, Port Angeles, WA 98362 immiller@u.washington.edu
Data Collection and Processing: Elwha Estuary Survey, February 2013 Ian Miller, WA Sea Grant Olympic Peninsula Field Office, 1502 E. Lauridsen Blvd #82, Port Angeles, WA 98362 immiller@u.washington.edu
PORTS AUSTRALIA. PRINCIPLES FOR GATHERING AND PROCESSING HYDROGRAPHIC INFORMATION IN AUSTRALIAN PORTS (Version 1.5 November 2012)
") PORTS AUSTRALIA PRINCIPLES FOR GATHERING AND PROCESSING HYDROGRAPHIC INFORMATION IN AUSTRALIAN PORTS (Version 1.5 November 2012) PREFACE These Principles have been prepared by the Hydrographic Surveyors
PORTS AUSTRALIA PRINCIPLES FOR GATHERING AND PROCESSING HYDROGRAPHIC INFORMATION IN AUSTRALIAN PORTS (Version 1.5 November 2012) PREFACE These Principles have been prepared by the Hydrographic Surveyors
EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY
 18 th World Conference on Non destructive Testing, 16-20 April 2012, Durban, South Africa EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY Arno VOLKER 1 and Hendrik VOS 1 TNO, Stieltjesweg 1,
18 th World Conference on Non destructive Testing, 16-20 April 2012, Durban, South Africa EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY Arno VOLKER 1 and Hendrik VOS 1 TNO, Stieltjesweg 1,
Measured broadband reverberation characteristics in Deep Ocean. [E.Mail: ]
![Measured broadband reverberation characteristics in Deep Ocean. [E.Mail: ]](/thumbs/90/101823179.jpg "Measured broadband reverberation characteristics in Deep Ocean. [E.Mail: ]") Measured broadband reverberation characteristics in Deep Ocean Baiju M Nair, M Padmanabham and M P Ajaikumar Naval Physical and Oceanographic Laboratory, Kochi-682 021, India [E.Mail: ] Received ; revised
Measured broadband reverberation characteristics in Deep Ocean Baiju M Nair, M Padmanabham and M P Ajaikumar Naval Physical and Oceanographic Laboratory, Kochi-682 021, India [E.Mail: ] Received ; revised
Learn more at
 Full scale model tests of a steel catenary riser C. Bridge 1, H. Howells 1, N. Toy 2, G. Parke 2, R. Woods 2 1 2H Offshore Engineering Ltd, Woking, Surrey, UK 2 School of Engineering, University of Surrey,
Full scale model tests of a steel catenary riser C. Bridge 1, H. Howells 1, N. Toy 2, G. Parke 2, R. Woods 2 1 2H Offshore Engineering Ltd, Woking, Surrey, UK 2 School of Engineering, University of Surrey,
SeaBat T50-R Product Description
 Ultra-High Resolution Multibeam Echosounder March 2017 PD17419-3 Table of Contents SYSTEM OVERVIEW... 5 Introduction... 5 Typical Applications... 5 Warranty... 5 SYSTEM ARCHITECTURE... 6 SeaBat T50-R...
Ultra-High Resolution Multibeam Echosounder March 2017 PD17419-3 Table of Contents SYSTEM OVERVIEW... 5 Introduction... 5 Typical Applications... 5 Warranty... 5 SYSTEM ARCHITECTURE... 6 SeaBat T50-R...
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Cruise Report. Field Oceanography. Team 5, Leg 3
 Cruise Report Field Oceanography Team 5, Leg 3 Submitted by: Lina Stolze Allison Kennedy Madlena Hukobyan Peter Hülse Date: October 27, 2008 1. Objectives The fieldwork was part of a field oceanography
Cruise Report Field Oceanography Team 5, Leg 3 Submitted by: Lina Stolze Allison Kennedy Madlena Hukobyan Peter Hülse Date: October 27, 2008 1. Objectives The fieldwork was part of a field oceanography
Products and Services HR3D, AUV3D
 Products and Services HR3D, AUV3D Multi-streamer Short Offset High Resolution 3D Seismic Acquisition Peter Sack Tor Haugland Sound Oceanics, LLC Houston, Texas USA 15 March 2012 Background Petromar V West
Products and Services HR3D, AUV3D Multi-streamer Short Offset High Resolution 3D Seismic Acquisition Peter Sack Tor Haugland Sound Oceanics, LLC Houston, Texas USA 15 March 2012 Background Petromar V West
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Increased streamer depth for dual-sensor acquisition Challenges and solutions Marina Lesnes*, Anthony Day, Martin Widmaier, PGS
 Increased streamer depth for dual-sensor acquisition Challenges and solutions Marina Lesnes*, Anthony Day, Martin Widmaier, PGS Summary The towing depth applicable to dual-sensor streamer acquisition has
Increased streamer depth for dual-sensor acquisition Challenges and solutions Marina Lesnes*, Anthony Day, Martin Widmaier, PGS Summary The towing depth applicable to dual-sensor streamer acquisition has
Geo-Vibro Corer
 High Frequency Vibro Coring System Operational Features Proven performance & high quality cores 30 kn impulse at 30 Hz for fast penetration Reliable, lightweight & cost effective Modular construction (cores
High Frequency Vibro Coring System Operational Features Proven performance & high quality cores 30 kn impulse at 30 Hz for fast penetration Reliable, lightweight & cost effective Modular construction (cores
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
MATRIX-MG Series. Innovation with Integrity. Automated High-Performance Gas Analyzers FT-IR
 MATRIX-MG Series Automated High-Performance Gas Analyzers Innovation with Integrity FT-IR The MATRIX-MG Series comprises three high-performance FT-IR gas analyzers in a compact and rugged housing. They
MATRIX-MG Series Automated High-Performance Gas Analyzers Innovation with Integrity FT-IR The MATRIX-MG Series comprises three high-performance FT-IR gas analyzers in a compact and rugged housing. They
NEED FOR SUPPLEMENTAL BATHYMETRIC SURVEY DATA COLLECTION
 305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
DIFFERENT SOLUTIONS TO INSPECT PLATFORM RISERS. By R van Agthoven and H Quakkelsteijn, ApplusRTD, Rotterdam, The Netherlands
 DIFFERENT SOLUTIONS TO INSPECT PLATFORM RISERS By R van Agthoven and H Quakkelsteijn, ApplusRTD, Rotterdam, The Netherlands SUMMARY The need for the inspection of pipelines and risers is growing, as the
DIFFERENT SOLUTIONS TO INSPECT PLATFORM RISERS By R van Agthoven and H Quakkelsteijn, ApplusRTD, Rotterdam, The Netherlands SUMMARY The need for the inspection of pipelines and risers is growing, as the
CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY
 CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY JON WEGGE Norwegian Defence Research Establishment (FFI), PO Box 115, NO-3191 Horten, Norway E-mail: jon.wegge@ffi.no False alarms resulting from
CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY JON WEGGE Norwegian Defence Research Establishment (FFI), PO Box 115, NO-3191 Horten, Norway E-mail: jon.wegge@ffi.no False alarms resulting from
Seismic Survey Designs for Converted Waves
 Seismic Survey Designs for Converted Waves James A. Musser* GMG/AXIS Inc., Denver, CO 1720 Red Cloud Road, Longmont, CO, 80501, USA jmusser@gmg.com ABSTRACT Designing converted wave 3D surveys is considerably
Seismic Survey Designs for Converted Waves James A. Musser* GMG/AXIS Inc., Denver, CO 1720 Red Cloud Road, Longmont, CO, 80501, USA jmusser@gmg.com ABSTRACT Designing converted wave 3D surveys is considerably
1 st Tidal and Water Level Working Group Meeting DHN, Niteroi, Brazil 31/03/09 02/04/09 Vertical Offshore Reference Framework (VORF) Chris Jones
 Chris Jones") 1 st Tidal and Water Level Working Group Meeting DHN, Niteroi, Brazil 31/03/09 02/04/09 Vertical Offshore Reference Framework (VORF) Chris Jones United Kingdom Hydrographic Office Presentation Structure
1 st Tidal and Water Level Working Group Meeting DHN, Niteroi, Brazil 31/03/09 02/04/09 Vertical Offshore Reference Framework (VORF) Chris Jones United Kingdom Hydrographic Office Presentation Structure