AN UNDERWATER AUGMENTED REALITY SYSTEM FOR COMMERCIAL DIVING OPERATIONS
|
|
|
- Ethan Anderson
- 5 years ago
- Views:
Transcription
1 SYSTEM FOR COMMERCIAL DIVING OPERATIONS ROGELIO!MORALES-GARCÍA, PETER!KEITLER,!PATRICK!MAIER, GUDRUN!KLINKER! FACHGEBIET AUGMENTED (FAR) OCEANS '09 MTS/IEEE BILOXI "MARINE TECHNOLOGY FOR OUR FUTURE: GLOBAL AND LOCAL CHALLENGES OCTOBER 26-29, 2009
2 This presentation describes the implementation of a novel prototypical Underwater Augmented Reality (UWAR) system that provides visual aids to increase commercial divers' capability to detect, perceive, and understand elements in underwater environments. We accomplished our goal by assisting divers in locating the work site, keeping informed about orientation and position (constantly), and providing a 3D virtual model for an assembling task.
3 INTRODUCTION DIVERS OPERATIONAL CONTEXT

4 Divers perform daily operations below the surface that are highly demanding and hazardous, having an important physiological and psychological impact on them, not to mention the challenges for their visual system. Some manifestations of these activities appear in divers lack of spatial positioning and orientation awareness, r e d u c e d c o g n i t i o n, a n d m e m o r y disorders.
5 UNIQUENESS OF DIVERS
, and performing a high level of adaptable and flexible thinking required in")

6 Divers are unique in their capabilities of executing complex tasks (both mentally and manually), and performing a high level of adaptable and flexible thinking required in major underwater operations. One example of this critical ability is underwater construction, concerned with the process of building and assembling structures in underwater or marine sites.
7 PREVALENCE OF DIVERS





,")


8 At the moment, divers capabilities cannot be matched by robotic systems, for instance, Remote Operated Vehicles (ROVs), Autonomous Underwater Vehicles (AUVs) or manned platfor ms, like Atmospheric Diving Suits (ADS) and submersibles.
9 Our goal is to provide visual cues to divers to compensate sensory impairment and cognitive changes, such as lack of orientation, position awareness, and memory disorders, in order to keep divers calm within acceptable levels of stress, a n d h o p i n g t o i m p r o v e d i v e r performance and safety.
10 DIVERS DIFFICULTIES PHYSIOLOGICAL VISUAL PSYCHOLOGICAL

11 During underwater operations, a great amount of stress is imposed on divers by environmental and working conditions such as pressure, visibility, weightlessness, current, etc. Those factors cause a restriction in divers sensory inputs, cognition and memory, which are essentials elements for divers in order to accomplish their task. Eventually, the associated stress driven by these factors compromise divers confidence and safety, and therefore, reduce performance.

12 DIVING PHYSIOLOGICAL EFFECTS Pressure Tactile-kinesthetic and vestibular system Mobility Hearing Other factors VISUAL PERCEPTION DIFFICULTIES DIVING PSYCHOLOGICAL EFFECTS Anxiety Panic Memory Disorders
13 UWAR UNDERWATER AUGMENTED
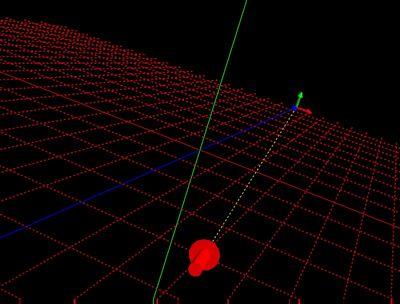
14 ORIENTATION AND POSITION AWARENESS A visualization of an artificial horizon (red grid) to i n c r e a s e p o s i t i o n a w a r e n e s s w i t h i n t h e environment and work-site. NAVIGATION AIDS A guidance to the work-site implemented with a virtual red arrow sign pointing to the task location. Designed to show a diver s course constantly, and a yellow line that links the arrow with the target position. CONTEXT-DEPENDENT MEMORY A 3D model of an assembling task or project planned, intended to reduce mental workload and compensate any memory disorder.
15 The 3D visualization model
16 EVALUATION SYSTEM



17 (a) (b) (c) (d) (a & b) Watertight housing for Logitech Quickcam Pro 4000 and emagin Z800 3D Visor HMD. (c & d) Calibration grid for camera calibration and optical square-marker for rendering.
18 RESULTS & DISCUSSION
 that points to the work-site and a yellow line that connects the arrow tip with the location of the target (constantly).")
19 FEATURES OF THE VISUALIZATION. A navigation aid (virtual red arrow) that points to the work-site and a yellow line that connects the arrow tip with the location of the target (constantly). An artificial horizon (red grid) to aware divers of their orientation related with horizon. A 3D model of an assembling task (flange).

 with")
 Egocentric view")
20 (a) (b) (c) (a) Exocentric view without augmentation). (b) Exocentric view with augmentation. (c) Egocentric view with augmentation.

 Exocentric view with augmentation.")
21 (a) (b) (c) SIMULATION OF A VESSEL INSPECTION. (a) Exocentric view without augmentation. (b) Exocentric view with augmentation. (c) Egocentric view with augmentation.
22 CONCLUSIONS & FURTHER DEVELOPMENTS
23 ACCOMPLISHED T h e i m p l e m e n t a t i o n o f a b a s i c augmented reality system for underwater applications. An effective underwater camera calibration and rendering. Navigation aids, artificial horizon, and m e m o r y c l u e s f o r e x e c u t i n g a n assembling task and an inspection survey.
24 FURTHER DEVELOPMENTS Implementation of an underwater acoustic tracking system for a wide spectrum of water conditions. Usability of the system in real conditions. Improvement of hardware to increase reliability and diver s experience. Acoustic imaging system and Mixed Reality (MR). Stress levels monitoring system.
25 AUGMENTED PERFORMANCE DIVER (AP-DIVER) This diver-machine synergy could upgrade divers to a new level, in which they will perform beyond their actual capacities and abilities, making them Augmented Per formance Divers.! A concept that in addition to the cognitive side (approached in this research) could include physical augmentation, which is the amplification of human endurance and strength.
26 SYSTEM FOR COMMERCIAL DIVING OPERATIONS ROGELIO!MORALES-GARCÍA, PETER!KEITLER,!PATRICK!MAIER, GUDRUN!KLINKER! FACHGEBIET AUGMENTED (FAR) OCEANS '09 MTS/IEEE BILOXI "MARINE TECHNOLOGY FOR OUR FUTURE: GLOBAL AND LOCAL CHALLENGES OCTOBER 26-29, 2009
An Underwater Augmented Reality System for Commercial Diving Operations
 An Underwater Augmented Reality System for Commercial Diving Operations R. Morales *, P. Keitler, P. Maier, G. Klinker Technische Universität München - Institut für Informatik Boltzmannstr. 3, D-85747
An Underwater Augmented Reality System for Commercial Diving Operations R. Morales *, P. Keitler, P. Maier, G. Klinker Technische Universität München - Institut für Informatik Boltzmannstr. 3, D-85747
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
1.0 PURPOSE AND NEED
 1.0 PURPOSE AND NEED 1.0 PURPOSE OF AND NEED FOR THE PROPOSED ACTION 1.1 INTRODUCTION The National Environmental Policy Act (NEPA) of 1969, as amended (42 United States Code Section 4321 et seq.); the
1.0 PURPOSE AND NEED 1.0 PURPOSE OF AND NEED FOR THE PROPOSED ACTION 1.1 INTRODUCTION The National Environmental Policy Act (NEPA) of 1969, as amended (42 United States Code Section 4321 et seq.); the
TP 11249E SHIP SAFETY STANDARD FOR IN-WATER SURVEYS
 TP 11249E SHIP SAFETY STANDARD FOR IN-WATER SURVEYS Canadian Coast Guard Ship Safety Branch 1992 TP 11249E RECORD OF CHANGES STANDARD FOR IN WATER SURVEYS DATE OF AMENDMENT AMENDMENT NUMBER SECTION AMENDED
TP 11249E SHIP SAFETY STANDARD FOR IN-WATER SURVEYS Canadian Coast Guard Ship Safety Branch 1992 TP 11249E RECORD OF CHANGES STANDARD FOR IN WATER SURVEYS DATE OF AMENDMENT AMENDMENT NUMBER SECTION AMENDED
Autonomous Marine Robots Assisting Divers
 LUST Overview UNIVERSITY OF ZAGREB Faculty of Electrical Engineering and Computing Department of Control & Computer Engineering Laboratory for Underwater Systems and technologies Autonomous Marine Robots
LUST Overview UNIVERSITY OF ZAGREB Faculty of Electrical Engineering and Computing Department of Control & Computer Engineering Laboratory for Underwater Systems and technologies Autonomous Marine Robots
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
RESOLUTION MSC.94(72) (adopted on 22 May 2000) PERFORMANCE STANDARDS FOR NIGHT VISION EQUIPMENT FOR HIGH-SPEED CRAFT (HSC)
 (adopted on 22 May 2000) PERFORMANCE STANDARDS FOR NIGHT VISION EQUIPMENT FOR HIGH-SPEED CRAFT (HSC)") MSC 72/23/Add.1 RESOLUTION MSC.94(72) EQUIPMENT FOR HIGH-SPEED CRAFT (HSC) THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) of the Convention on the International Maritime Organization concerning
MSC 72/23/Add.1 RESOLUTION MSC.94(72) EQUIPMENT FOR HIGH-SPEED CRAFT (HSC) THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) of the Convention on the International Maritime Organization concerning
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities
 Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS?
 www.cns-international.com CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS? EMRA 14 Workshop CNR, Rome June, 09 th 10 th 2014 CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY
www.cns-international.com CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS? EMRA 14 Workshop CNR, Rome June, 09 th 10 th 2014 CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY
Using a metal-detector to locate explosive hazards
 Using a metal-detector to locate explosive hazards There must always be absolute confidence in the metal-detector s ability to locate the target device at the required depth before metal-detector Clearance
Using a metal-detector to locate explosive hazards There must always be absolute confidence in the metal-detector s ability to locate the target device at the required depth before metal-detector Clearance
Real-Time Walk Light Detection with a Mobile Phone
 Real-Time Walk Light Detection with a Mobile Phone Volodymyr Ivanchenko, James Coughlan and Huiying Shen The Smith-Kettlewell Eye Research Institute, San Francisco CA {vivanchenko, coughlan, hshen}@ski.org
Real-Time Walk Light Detection with a Mobile Phone Volodymyr Ivanchenko, James Coughlan and Huiying Shen The Smith-Kettlewell Eye Research Institute, San Francisco CA {vivanchenko, coughlan, hshen}@ski.org
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
Review and Classification of The Modern ROV
 Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
What s Up in Navigation Displays?
 What s Up in Navigation Displays? Captain PAUL CHAPMAN paul.chapman@compassadjuster.com.au 2009 What s up in Navigation Displays? Captain Paul Chapman Situation Awareness When following a passage plan,
What s Up in Navigation Displays? Captain PAUL CHAPMAN paul.chapman@compassadjuster.com.au 2009 What s up in Navigation Displays? Captain Paul Chapman Situation Awareness When following a passage plan,
In-Service Inspection of Ammonia Storage Tanks
 White Paper In-Service Inspection of Ammonia Storage Tanks By: Ole Noerrekaer Mortensen, Business Manager, Advanced NDT Global at FORCE Technology Personnel ready for mounting the Inspection System in
White Paper In-Service Inspection of Ammonia Storage Tanks By: Ole Noerrekaer Mortensen, Business Manager, Advanced NDT Global at FORCE Technology Personnel ready for mounting the Inspection System in
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
BRITISH ACCREDITATION COUNCIL INSPECTION REPORT. INTERIM INSPECTION (College)
") BRITISH ACCREDITATION COUNCIL INSPECTION REPORT INTERIM INSPECTION (College) INSTITUTION: The Underwater Centre ADDRESS: Marine Walk Carmichael Way Fort William Inverness-shire PH33 6FF HEAD OF INSTITUTION:
BRITISH ACCREDITATION COUNCIL INSPECTION REPORT INTERIM INSPECTION (College) INSTITUTION: The Underwater Centre ADDRESS: Marine Walk Carmichael Way Fort William Inverness-shire PH33 6FF HEAD OF INSTITUTION:
Glossary. Access Ramp: A slope which allows a wheelchair to enter or exit a location.
 Glossary The following glossary includes common terminology in O & M training and definition, to terms used in the O & M guidelines. It should not be considered an exhaustive listing of O&M-related terms.
Glossary The following glossary includes common terminology in O & M training and definition, to terms used in the O & M guidelines. It should not be considered an exhaustive listing of O&M-related terms.
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
1. Unlimited, so long as adequate facility, supplies and time are provided to ensure comprehensive and complete training of subject matter
 20. Full Cave Diver 20.1 Introduction This course is the third stage of training in the series of TDI s Cave Diver development program. Advanced cave dive planning, the practical execution of different
20. Full Cave Diver 20.1 Introduction This course is the third stage of training in the series of TDI s Cave Diver development program. Advanced cave dive planning, the practical execution of different
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
Age Group Organization
 title subtitle Age Group Organization Director: Claudio Reyna Author: Dr. Javier Perez introduction Organization of player development by age and stage Children do not learn in the same way as adults,
title subtitle Age Group Organization Director: Claudio Reyna Author: Dr. Javier Perez introduction Organization of player development by age and stage Children do not learn in the same way as adults,
API Study on Detection and Recovery of Sunken Oil. API Study Objectives
 API Study on Detection and Recovery of Sunken Oil Jacqueline Michel, Research Planning, Inc. Mark Ploen, QualiTech Jim Elliott, T&T Marine Salvage, Inc. William Key API Study Objectives 1. ID current best
API Study on Detection and Recovery of Sunken Oil Jacqueline Michel, Research Planning, Inc. Mark Ploen, QualiTech Jim Elliott, T&T Marine Salvage, Inc. William Key API Study Objectives 1. ID current best
1. Unlimited, so long as adequate facility, supplies and time are provided to ensure comprehensive and complete training of subject matter
 18. Cavern Diver 18.1 Introduction This course is designed to develop the minimum skills and knowledge for cavern and overhead environment diving within the limits of light penetration; in addition outlines
18. Cavern Diver 18.1 Introduction This course is designed to develop the minimum skills and knowledge for cavern and overhead environment diving within the limits of light penetration; in addition outlines
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud. Hydraulically Actuated Hexapod Robots. Design, Implementation. and Control.
 Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
1. Unlimited, so long as adequate facility, supplies and time are provided to ensure comprehensive and complete training of subject matter
 19. Full Cave Diver 19.1 Introduction This course is the third stage of training in the series of TDI s Cave Diver development program. Advanced cave dive planning, the practical execution of different
19. Full Cave Diver 19.1 Introduction This course is the third stage of training in the series of TDI s Cave Diver development program. Advanced cave dive planning, the practical execution of different
TAMPA BAY UNITED ACADEMY PHILOSOPHY & CURRICULUM
 TAMPA BAY UNITED ACADEMY PHILOSOPHY & CURRICULUM MISSION The mission of the Tampa Bay United Academy is to provide the best possible coaching and instruction for our young players to ensure proper development
TAMPA BAY UNITED ACADEMY PHILOSOPHY & CURRICULUM MISSION The mission of the Tampa Bay United Academy is to provide the best possible coaching and instruction for our young players to ensure proper development
The I-UTECH Consortium
 The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
Design of a double quadruped for the Tech United soccer robot
 Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC)
") USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC) BAA Number: HSCG32-07-R-R00013 Title of Proposal: Heavy Oil Tracking Tactics, Techniques
USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC) BAA Number: HSCG32-07-R-R00013 Title of Proposal: Heavy Oil Tracking Tactics, Techniques
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL
 ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
HUMAN (DRIVER) ERRORS
 ERRORS") HUMAN (DRIVER) ERRORS Josef Kocourek 1, Tomáš Padělek 2 Summary: Currently CTU FTS creates Road Safety Inspection (RSI) in Central Bohemia region. The survey is specialized in roads of class II. This article
HUMAN (DRIVER) ERRORS Josef Kocourek 1, Tomáš Padělek 2 Summary: Currently CTU FTS creates Road Safety Inspection (RSI) in Central Bohemia region. The survey is specialized in roads of class II. This article
3. Intro to Tech. 3.1 Introduction. 3.2 Qualifications of Graduates. 3.3 Who May Teach. 3.4 Student to Instructor Ratio
 3. Intro to Tech 3.1 Introduction The TDI Intro to Tech course introduces students to the world of technical diving. This course is designed as an introductory course to the TDI Advanced Nitrox course
3. Intro to Tech 3.1 Introduction The TDI Intro to Tech course introduces students to the world of technical diving. This course is designed as an introductory course to the TDI Advanced Nitrox course
SUMMARY OF SAFETY INVESTIGATION REPORT
 Investigation Body for Railway Accidents and Incidents SUMMARY OF SAFETY INVESTIGATION REPORT COLLISION OF TWO PASSENGER TRAINS IN BUIZINGEN ON 15 FEBRUARY 2010 May 2012 On Monday 15 February 2010 at 08:28:19,
Investigation Body for Railway Accidents and Incidents SUMMARY OF SAFETY INVESTIGATION REPORT COLLISION OF TWO PASSENGER TRAINS IN BUIZINGEN ON 15 FEBRUARY 2010 May 2012 On Monday 15 February 2010 at 08:28:19,
A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING
 A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING By Marian Copilet, Durham Pipeline Technology Ltd., Gateshead, UK & Prof. Ernie Appleton, University of Durham 1. ABSTRACT This paper discusses
A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING By Marian Copilet, Durham Pipeline Technology Ltd., Gateshead, UK & Prof. Ernie Appleton, University of Durham 1. ABSTRACT This paper discusses
Tifft Water Supply Symposium
 Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
National Robotics Competition 2018 NRC WRO Challenge Manual
 National Robotics Competition 2018 NRC WRO Challenge Manual Page 1 of 13 A. Competition Categories World Robot Olympiad has three regular competition categories, and an Open category: 1. Regular Category
National Robotics Competition 2018 NRC WRO Challenge Manual Page 1 of 13 A. Competition Categories World Robot Olympiad has three regular competition categories, and an Open category: 1. Regular Category
NCHRP Project Crossing Solutions at Roundabouts and Channelized Turn Lanes for Pedestrians with Vision Disabilities UNC-CH CH Highway Safety Res
 An Overview: NCHRP Project 3-783 Crossing Solutions at Roundabouts and Channelized Turn Lanes for Pedestrians with Vision Disabilities: R. G. Hughes, Ph.D. and R. Srinivasan,, Ph.D. UNC Highway Safety
An Overview: NCHRP Project 3-783 Crossing Solutions at Roundabouts and Channelized Turn Lanes for Pedestrians with Vision Disabilities: R. G. Hughes, Ph.D. and R. Srinivasan,, Ph.D. UNC Highway Safety
TIGHTNESS. Glass sealing Thanks to our glass-sealing technology, ODU products can meet the most demanding tightness requirements.
 TIGHTNESS Glass sealing Thanks to our glass-sealing technology, ODU products can meet the most demanding tightness requirements. ODU has the necessary expertise for developing and manufacturing connectors
TIGHTNESS Glass sealing Thanks to our glass-sealing technology, ODU products can meet the most demanding tightness requirements. ODU has the necessary expertise for developing and manufacturing connectors
STUDENT EXCHANGE PROGRAMME The Coach and the GK Coach
 STUDENT EXCHANGE PROGRAMME The Coach and the GK Coach What has changed for the GK of today? Rules Pass- back - Average 80% of actions of the GK in a Game is with the ball at his feet 6 seconds Offside
STUDENT EXCHANGE PROGRAMME The Coach and the GK Coach What has changed for the GK of today? Rules Pass- back - Average 80% of actions of the GK in a Game is with the ball at his feet 6 seconds Offside
18. Introductory Cave Diver
 18. Introductory Cave Diver 18.1 Introduction This course is an introduction to the basic principles of cave diving utilizing a single primary guide line. Introductory cave diving is the second level in
18. Introductory Cave Diver 18.1 Introduction This course is an introduction to the basic principles of cave diving utilizing a single primary guide line. Introductory cave diving is the second level in
MUTCD Part 6: Temporary Traffic Control
 MUTCD Part 6: Temporary Traffic Control OMUTCD English units are preferred. OHIO MANUAL OF UNIFORM TRAFFIC CONTROL DEVICES TABLE OF CONTENTS PREFACE INTRODUCTION TABLE OF CONTENTS PART 1. GENERAL Chapter
MUTCD Part 6: Temporary Traffic Control OMUTCD English units are preferred. OHIO MANUAL OF UNIFORM TRAFFIC CONTROL DEVICES TABLE OF CONTENTS PREFACE INTRODUCTION TABLE OF CONTENTS PART 1. GENERAL Chapter
MISSION PLANNING AND DATA ACQUISITION SOFTWARE
 MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
Golf. By Matthew Cooke. Game Like Training
 Game Like Training for Golf By Matthew Cooke Game Like Training @gltgolf @gltraininggolf Introduction In this quick start guide we dive a little deeper into what it means to train in a Game Like way. Game
Game Like Training for Golf By Matthew Cooke Game Like Training @gltgolf @gltraininggolf Introduction In this quick start guide we dive a little deeper into what it means to train in a Game Like way. Game
Building the Playing Style Concepts
 Building the Playing Style Concepts Style Of Play - Specific Players 1, 2 or 3 touch maximum - minimizing the number of touches improves the speed of play. Keep the game simple - do not force situations,
Building the Playing Style Concepts Style Of Play - Specific Players 1, 2 or 3 touch maximum - minimizing the number of touches improves the speed of play. Keep the game simple - do not force situations,
To AJKA-International AJKA-I of PA Instructor Trainee s Report #31. Subject: Karate and Personality
 To AJKA-International AJKA-I of PA Instructor Trainee s Report #31 Subject: Karate and Personality To AJKA-International AJKA-I of PA Instructor s Trainee Report #31 Subject: Karate and Personality People
To AJKA-International AJKA-I of PA Instructor Trainee s Report #31 Subject: Karate and Personality To AJKA-International AJKA-I of PA Instructor s Trainee Report #31 Subject: Karate and Personality People
13. Shallow Water Scuba Diver
 13. Shallow Water Scuba Diver 13.1 Introduction This entry-level certification course is designed to give students the necessary skills to safely conduct open water dives in conditions similar to their
13. Shallow Water Scuba Diver 13.1 Introduction This entry-level certification course is designed to give students the necessary skills to safely conduct open water dives in conditions similar to their
Designing for Individuals who are visually impaired or blind
 Designing for Individuals who are visually impaired or blind Janet M. Barlow Accessible Design for the Blind NACTO Designing Cities Conference October 25, 2012 What do we mean by visually impaired or blind?
Designing for Individuals who are visually impaired or blind Janet M. Barlow Accessible Design for the Blind NACTO Designing Cities Conference October 25, 2012 What do we mean by visually impaired or blind?
EUROPEAN COMMISSION DG RTD. evader
 EUROPEAN COMMISSION DG RTD SEVENTH FRAMEWORK PROGRAMME THEME 7 TRANSPORT - SST SST.2011.RTD-1 GA No. 285095 evader Electric Vehicle Alert for Detection and Emergency Response Deliverable No. D2.0 Document
EUROPEAN COMMISSION DG RTD SEVENTH FRAMEWORK PROGRAMME THEME 7 TRANSPORT - SST SST.2011.RTD-1 GA No. 285095 evader Electric Vehicle Alert for Detection and Emergency Response Deliverable No. D2.0 Document
Entry Level Requirements and Basic Introductory Course Outline for New Remotely Operated Vehicle (ROV) Personnel
 Personnel") AB Entry Level Requirements and Basic Introductory Course Outline for New Remotely Operated Vehicle (ROV) Personnel International Marine Contractors Association www.imca-int.com IMCA R 002 Rev. 2 May 2009
AB Entry Level Requirements and Basic Introductory Course Outline for New Remotely Operated Vehicle (ROV) Personnel International Marine Contractors Association www.imca-int.com IMCA R 002 Rev. 2 May 2009
TDI Standards and Procedures. Part 2: TDI Diver Standards
 22. DPV Cave Diver 22.1 Introduction This course is designed to teach trained cave divers how to utilize Diver Propulsion Vehicles (DPVs) in the cave environment. Divers will learn about safe DPV use,
22. DPV Cave Diver 22.1 Introduction This course is designed to teach trained cave divers how to utilize Diver Propulsion Vehicles (DPVs) in the cave environment. Divers will learn about safe DPV use,
BRIDGING THE EXPERIENCE GAP: TECHNIQUES FOR REDUCING THE STRESS OF ZERO VISIBILITY TRAINING
 BRIDGING THE EXPERIENCE GAP: TECHNIQUES FOR REDUCING THE STRESS OF ZERO VISIBILITY TRAINING Steven H. Sellers Diving Safety Officer I East Carolina University Greenville, NC 27858-4353 Zero visibility
BRIDGING THE EXPERIENCE GAP: TECHNIQUES FOR REDUCING THE STRESS OF ZERO VISIBILITY TRAINING Steven H. Sellers Diving Safety Officer I East Carolina University Greenville, NC 27858-4353 Zero visibility
British Sub-Aqua Club Tel: +44 (0) Fax: +44 (0) bsac.com
 Fax: +44 (0) bsac.com") Skill Development Course Syllabus DRAGER DOLPHIN SEMI-CLOSED REBREATHER AIM To qualify as a BSAC Dräger Dolphin Rebreather Diver who is competent to: Conduct dives with an open circuit buddy who is a minimum
Skill Development Course Syllabus DRAGER DOLPHIN SEMI-CLOSED REBREATHER AIM To qualify as a BSAC Dräger Dolphin Rebreather Diver who is competent to: Conduct dives with an open circuit buddy who is a minimum
Survey of Underwater NDT Technologies for Offshore Assets
 Survey of Underwater NDT Technologies for Offshore Assets Ayman Amer, Fadl Abdellatif, Ali Outa, Hassane Trigui, Sahejad Patel, Ameen Obedan, Fernando Diaz Ledezma, Hamad Al Saiari and Ihsan Taie, Saudi
Survey of Underwater NDT Technologies for Offshore Assets Ayman Amer, Fadl Abdellatif, Ali Outa, Hassane Trigui, Sahejad Patel, Ameen Obedan, Fernando Diaz Ledezma, Hamad Al Saiari and Ihsan Taie, Saudi
8. Decompression Procedures Diver
 8. Decompression Procedures Diver 8.1 Introduction This course examines the theory, methods and procedures of planned stage decompression diving. This program is designed as a stand-alone course or it
8. Decompression Procedures Diver 8.1 Introduction This course examines the theory, methods and procedures of planned stage decompression diving. This program is designed as a stand-alone course or it
Cygnus Underwater. UT Meters & Spare Parts Sales. Searchwise Aberdeen Ltd Unit 6, Broomiesburn, Ellon Ind Estate, Ellon, Aberdeenshire, UK, AB41 9RD
 Cygnus Underwater UT Meters & Spare Parts Sales The Cygnus Underwater is the original diver held subsea multiple echo Ultrasonic Thickness Gauge. It was designed for use by divers undertaking subsea maintenance
Cygnus Underwater UT Meters & Spare Parts Sales The Cygnus Underwater is the original diver held subsea multiple echo Ultrasonic Thickness Gauge. It was designed for use by divers undertaking subsea maintenance
Underwater Hotel best way to extend and upgrade resorts
 UNDERWATER HOTEL Underwater Hotel best way to extend and upgrade resorts The Water Discus is an oasis of active leisure and extreme marine adventure that consists of two units an underwater residential
UNDERWATER HOTEL Underwater Hotel best way to extend and upgrade resorts The Water Discus is an oasis of active leisure and extreme marine adventure that consists of two units an underwater residential
PREMIUM PROTECTIVE SUITS AND EQUIPMENT FOR MARITIME OPERATIONS - V.2 - Q AMPHIBIOUS SOLUTIONS BY NEPTUNUS. distributed by
 PREMIUM PROTECTIVE SUITS AND EQUIPMENT FOR MARITIME OPERATIONS - V.2 - Q2-2017 AMPHIBIOUS SOLUTIONS BY NEPTUNUS distributed by We supply amphibious products and systems for a vast variety of needs and
PREMIUM PROTECTIVE SUITS AND EQUIPMENT FOR MARITIME OPERATIONS - V.2 - Q2-2017 AMPHIBIOUS SOLUTIONS BY NEPTUNUS distributed by We supply amphibious products and systems for a vast variety of needs and
7. TDI Advanced Wreck Diver Course
 7. TDI Advanced Wreck Diver Course 7.1 Introduction This course provides training and experience to competently conduct advanced wreck dives. This program includes penetration skills and techniques. Depths
7. TDI Advanced Wreck Diver Course 7.1 Introduction This course provides training and experience to competently conduct advanced wreck dives. This program includes penetration skills and techniques. Depths
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement
 SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
Development of tether mooring type underwater robots: Anchor diver I and II
 Indian Journal of Geo-Marine Sciences Vol. 40(2), April 2011, pp. 181-190 Development of tether mooring type underwater robots: Anchor diver I and II Ya-Wen Huang 1, Koji Ueda 1, Kazuhiro Itoh 2, Yuki
Indian Journal of Geo-Marine Sciences Vol. 40(2), April 2011, pp. 181-190 Development of tether mooring type underwater robots: Anchor diver I and II Ya-Wen Huang 1, Koji Ueda 1, Kazuhiro Itoh 2, Yuki
The automobile is a complex system in which humans play an important role. Driving is
 FRONT BRAKE LIGHT Emily Gates DEA 325 Homework #3 November 29, 2007 The automobile is a complex system in which humans play an important role. Driving is largely a visual task 1 - when vision is obstructed,
FRONT BRAKE LIGHT Emily Gates DEA 325 Homework #3 November 29, 2007 The automobile is a complex system in which humans play an important role. Driving is largely a visual task 1 - when vision is obstructed,
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION Task and Rules Document
 NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
Effectively Improving Technique of Developing Swimmers. Ryan Atkison, MSc, CSCS Sport Biomechanist Canadian Sport Institute Ontario
 Effectively Improving Technique of Developing Swimmers Ryan Atkison, MSc, CSCS Sport Biomechanist Canadian Sport Institute Ontario Effectively Improving Technique of Developing Swimmers *Traditional swimming
Effectively Improving Technique of Developing Swimmers Ryan Atkison, MSc, CSCS Sport Biomechanist Canadian Sport Institute Ontario Effectively Improving Technique of Developing Swimmers *Traditional swimming
Squeak and Rattle Solutions: Prevention in CAD
 Squeak and Rattle Solutions: Prevention in CAD By Christian Berndt, Guido Rybczynski, Patrick Schimmelbauer (ZIEGLER-Instruments GmbH) Klaus Steinberg (7senses) Dr. Hans-Jürgen Daams (Hajuveda) Full vehicle
Squeak and Rattle Solutions: Prevention in CAD By Christian Berndt, Guido Rybczynski, Patrick Schimmelbauer (ZIEGLER-Instruments GmbH) Klaus Steinberg (7senses) Dr. Hans-Jürgen Daams (Hajuveda) Full vehicle
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
7. Open Water Scuba Diver
 7. Open Water Scuba Diver 7.1 Introduction This certification course is designed to give students the necessary skills to conduct open water dives in conditions similar to their training without the direct
7. Open Water Scuba Diver 7.1 Introduction This certification course is designed to give students the necessary skills to conduct open water dives in conditions similar to their training without the direct
HYPERBARIC INTERVENTION IN SUBMARINE RESCUE SUT June 8 th Doug Austin Director, Asia Pacific
 HYPERBARIC INTERVENTION IN SUBMARINE RESCUE SUT June 8 th 2016 Doug Austin Director, Asia Pacific INTRODUCTION Technologies and techniques developed for human survival in the ocean depths required to support
HYPERBARIC INTERVENTION IN SUBMARINE RESCUE SUT June 8 th 2016 Doug Austin Director, Asia Pacific INTRODUCTION Technologies and techniques developed for human survival in the ocean depths required to support
SAFETY OF NAVIGATION OPERATING ANOMALIES IDENTIFIED WITHIN ECDIS
 E 4 ALBERT EMBANKMENT LONDON SE1 7SR Telephone: +44 (0)20 7735 7611 Fax: +44 (0)20 7587 3210 SN.1/Circ.312 9 July 2012 SAFETY OF NAVIGATION OPERATING ANOMALIES IDENTIFIED WITHIN ECDIS 1 The Sub-Committee
E 4 ALBERT EMBANKMENT LONDON SE1 7SR Telephone: +44 (0)20 7735 7611 Fax: +44 (0)20 7587 3210 SN.1/Circ.312 9 July 2012 SAFETY OF NAVIGATION OPERATING ANOMALIES IDENTIFIED WITHIN ECDIS 1 The Sub-Committee
Any active TDI Helitrox Instructor who has been approved by TDI Headquarters Training Department
 10. Helitrox Diver 10.1 Introduction The Helitrox course examines the theory, methods and procedures for planned stage decompression diving utilizing Helium in the breathing mixture. This program is designed
10. Helitrox Diver 10.1 Introduction The Helitrox course examines the theory, methods and procedures for planned stage decompression diving utilizing Helium in the breathing mixture. This program is designed
In this course you will learn the following
 Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Emerald Soccer Club. U10 - U13 Manual
 2014 Emerald Soccer Club U10 - U13 Manual Coaching Manual Contents Page 2 Contents Page 3 Overview Page 4-6 Model Page 7 Stage 3 General Warm Up Page 8 Stage 3 Specific Warm Up Page 9 Session 1 Dribbling
2014 Emerald Soccer Club U10 - U13 Manual Coaching Manual Contents Page 2 Contents Page 3 Overview Page 4-6 Model Page 7 Stage 3 General Warm Up Page 8 Stage 3 Specific Warm Up Page 9 Session 1 Dribbling
VR Fully Immersive Baseball Game
 CASE STUDY VR Fully Immersive Baseball Game AVRspot The Story Behind VR Fully Immersive Baseball Game is a virtual reality game for HTC Vive and Vive Tracker platforms that recreates the immersive experience
CASE STUDY VR Fully Immersive Baseball Game AVRspot The Story Behind VR Fully Immersive Baseball Game is a virtual reality game for HTC Vive and Vive Tracker platforms that recreates the immersive experience
38. Rebreather Full Cave Diver
 38. Rebreather Full Cave Diver 38.1 Introduction This course is the third stage of training in the series of TDI s Rebreather Cave Diver development program. Advanced rebreather cave dive planning, the
38. Rebreather Full Cave Diver 38.1 Introduction This course is the third stage of training in the series of TDI s Rebreather Cave Diver development program. Advanced rebreather cave dive planning, the
Robo-Nemo. Educating youth about ocean research! sponsored by the. National Science Foundation
 Robo-Nemo Educating youth about ocean research! sponsored by the National Science Foundation created by Monique Chyba and Ryan N. Smith University of Hawaii at Manoa Department of Mathematics in conjunction
Robo-Nemo Educating youth about ocean research! sponsored by the National Science Foundation created by Monique Chyba and Ryan N. Smith University of Hawaii at Manoa Department of Mathematics in conjunction
Centre of Excellence for Subsea Safety
 Centre of Excellence for Subsea Safety Departments nhc training nhc testing nhc consulting nhc emergency Medical Equipment Hyperbaric Welding 07 09 13 15 17 11 Welcome to nhc National Hyperbaric Centre
Centre of Excellence for Subsea Safety Departments nhc training nhc testing nhc consulting nhc emergency Medical Equipment Hyperbaric Welding 07 09 13 15 17 11 Welcome to nhc National Hyperbaric Centre
STUDY OF UNDERWATER THRUSTER (UT) FRONT COVER OF MSI300 AUTONOMOUS UNDERWATER VEHICLE (AUV) USING FINITE ELEMENT ANALYSIS (FEA)
 FRONT COVER OF MSI300 AUTONOMOUS UNDERWATER VEHICLE (AUV) USING FINITE ELEMENT ANALYSIS (FEA)") STUDY OF UNDERWATER THRUSTER (UT) FRONT COVER OF MSI300 AUTONOMOUS UNDERWATER VEHICLE (AUV) USING FINITE ELEMENT ANALYSIS (FEA) M. Sabri 1, 2, T. Ahmad 1, M. F. M. A. Majid 1 and A. B. Muhamad Husaini
STUDY OF UNDERWATER THRUSTER (UT) FRONT COVER OF MSI300 AUTONOMOUS UNDERWATER VEHICLE (AUV) USING FINITE ELEMENT ANALYSIS (FEA) M. Sabri 1, 2, T. Ahmad 1, M. F. M. A. Majid 1 and A. B. Muhamad Husaini
Introduction This section includes suggestions on how to use this guide, an overview of course philosophy and goals.
 Oceanic OC1 Computer Diver DISTINCTIVE SPECIALTY INSTRUCTOR OUTLINE Introduction This section includes suggestions on how to use this guide, an overview of course philosophy and goals. How to Use this
Oceanic OC1 Computer Diver DISTINCTIVE SPECIALTY INSTRUCTOR OUTLINE Introduction This section includes suggestions on how to use this guide, an overview of course philosophy and goals. How to Use this
Sensitivity to the Gain of Optic Flow During Walking
 Sensitivity to the Gain of Optic Flow During Walking Melissa J. Kearns 1, Frank H. Durgin 2, & William H. Warren, Jr. 1 1 Brown University, Dept. of Cognitive & Linguistic Sciences 2 Swarthmore College,
Sensitivity to the Gain of Optic Flow During Walking Melissa J. Kearns 1, Frank H. Durgin 2, & William H. Warren, Jr. 1 1 Brown University, Dept. of Cognitive & Linguistic Sciences 2 Swarthmore College,
1 The range of monitoring and ways of its performing
 Methodology of underwater monitoring T. Graczyk, M. Matejski & W. Skorski Ocean & Ship Technology Institute Technical University of Szczecin Al Piastow 41, 71-065 Szczecin, Poland Abstract Underwater monitoring
Methodology of underwater monitoring T. Graczyk, M. Matejski & W. Skorski Ocean & Ship Technology Institute Technical University of Szczecin Al Piastow 41, 71-065 Szczecin, Poland Abstract Underwater monitoring
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Vision Based Autonomous Underwater Vehicle for Pipeline Tracking
 Vision Based Autonomous Underwater Vehicle for Pipeline Tracking Manikandan. G 1, Sridevi. S 2, Dhanasekar. J 3 Assistant Professor, Department of Mechatronics Engineering, Bharath University, Chennai,
Vision Based Autonomous Underwater Vehicle for Pipeline Tracking Manikandan. G 1, Sridevi. S 2, Dhanasekar. J 3 Assistant Professor, Department of Mechatronics Engineering, Bharath University, Chennai,
Digiquartz Water-Balanced Pressure Sensors for AUV, ROV, and other Moving Underwater Applications
 Digiquartz Water-Balanced Pressure Sensors for AUV, ROV, and other Moving Underwater Applications Dr. Theo Schaad Principal Scientist Paroscientific, Inc. 2002 Paroscientific, Inc. Page 1 of 6 Digiquartz
Digiquartz Water-Balanced Pressure Sensors for AUV, ROV, and other Moving Underwater Applications Dr. Theo Schaad Principal Scientist Paroscientific, Inc. 2002 Paroscientific, Inc. Page 1 of 6 Digiquartz
Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs
 Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs Jehyun Cho a, Ghang Lee a, Jongsung Won a and Eunseo Ryu a a Dept. of Architectural Engineering, University of Yonsei,
Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs Jehyun Cho a, Ghang Lee a, Jongsung Won a and Eunseo Ryu a a Dept. of Architectural Engineering, University of Yonsei,
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS
 SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
ADA PRESENTATION (CURB RAMPS)
") ADA PRESENTATION (CURB RAMPS) ACECNJ/NJDOT/FHWA DESIGN SUMMIT Warren Howard New Jersey Department of Transportation May 21, 2013 ADA Curb Ramps NJDOT wants curb ramps to be designed & constructed properly
ADA PRESENTATION (CURB RAMPS) ACECNJ/NJDOT/FHWA DESIGN SUMMIT Warren Howard New Jersey Department of Transportation May 21, 2013 ADA Curb Ramps NJDOT wants curb ramps to be designed & constructed properly
OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING
 OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING Erich Ramschak Dr. Jürgen Holzinger Erik Bogner AVL List GmbH erich.ramschak@avl.com ConCar-Forum Berlin 5.-6.July 2017
OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING Erich Ramschak Dr. Jürgen Holzinger Erik Bogner AVL List GmbH erich.ramschak@avl.com ConCar-Forum Berlin 5.-6.July 2017
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
ESAIL D3.1.1 Requirement specifications of the tether test reels
 D3.1.1 Requirement specifications of the tether test reels Work Package: WP 3.1 Version: Version 1.0 Prepared by: DLR German Aerospace Center, Olaf Krömer, Roland Rosta Time: Bremen, May 30 th, 2011 Coordinating
D3.1.1 Requirement specifications of the tether test reels Work Package: WP 3.1 Version: Version 1.0 Prepared by: DLR German Aerospace Center, Olaf Krömer, Roland Rosta Time: Bremen, May 30 th, 2011 Coordinating
IDC Lesson Guides Errata
 IDC Lesson Guides Errata Course Orientation Orient.ppt: Slide 8, changed small bullet to: Visit padi.com for the latest for college credit information Slide 22, changed third small bullet to: Perform all
IDC Lesson Guides Errata Course Orientation Orient.ppt: Slide 8, changed small bullet to: Visit padi.com for the latest for college credit information Slide 22, changed third small bullet to: Perform all
Underwater Marking AUV using Paraffin Wax
 SP6 Underwater Marking AUV using Paraffin Wax Seokyong Song and Son-Cheol Yu Dept. Of Creative IT Engineering Pohang University of Science and Technology Pohang, South Korea Email: {einst1879, sncyu} @postech.ac.kr
SP6 Underwater Marking AUV using Paraffin Wax Seokyong Song and Son-Cheol Yu Dept. Of Creative IT Engineering Pohang University of Science and Technology Pohang, South Korea Email: {einst1879, sncyu} @postech.ac.kr
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology
 How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous