Marine Opera*ons Group Marine Technology Program SRI Interna*onal SRI International
|
|
|
- Solomon Miles
- 5 years ago
- Views:
Transcription



1 Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International
2 Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft. Wharf 20 alongside depth 2-ton capacity crane 3-phase 220/480 vac power Dockside Ethernet and water Dock is accessible for large truck deliveries Compressed air Marine Operations Building 34 x 54 air conditioned operations support shop Direct wharf access 5-ton hoist Internet access Compressed air 3-phase 220/480 power Generator backed-up single phase 110 vac Conference/training room 1000 ft² (36+ person capacity) Additional office space, conference, and training rooms



3 Control Van Designed as a vehicle shipping container and opera*ons support center Separate opera*ons sec*on and work space Theater- style sea*ng Dimensions: 8 W x 20 L x 9.5 H Climate controlled Built- in automated, plumbed coffeemaker

 Naviga)on: INS- Kearfod T24 USBL- and DVL- aided GPS for ini*al fix Acous*c modem for")
4 Bluefin 12- inch AUV Depth Ra)ng: 600m w/1000m op*on Payload: Up to 36 long, free flooding Power: Up to 8 hrs run*me; 100W of power for sensors Speed: 3 kts cruise (1.5 m/s); 5kts max (2.5 m/s) Naviga)on: INS- Kearfod T24 USBL- and DVL- aided GPS for ini*al fix Acous*c modem for updates Weight: Air: Up to 550lb with payload Salt water: Neutral Dimensions: 12- ¾ D x 132 L


5 Deep Sea Systems Sea Max ROV Depth Ra)ng: 300 meters with meter op*on Payload: up to 150 lbs Sub Sea Power: 800W of 12 or 24 VDC with 120AC available Comms: Fiber to surface; Ethernet and RS232/485 subsea Naviga)on: INS- Kearfod T16; USBL- and DVL- aided Weight: 1100 lbs in air Dimensions: 66 L x 35 W x 45 H Launch and Recovery System: Crane or A- frame





6 Coastal Opera*ons Support AUV operations M/V Sea Sub II Target Deployment Dive Support ROV Operations



7 Offshore Opera*ons R/V Seward Johnson at SRI s 450 dock.



8 Field Tes*ng and Evalua*on U.S. Coast Guard RDC T&E support MDAS (sensor deployment) ONR AUV / sonar tes*ng Buoys, RF sensors, chemical






9 Imaging Sonars Didson FOV: 28 Freq: MHz Max range: 30 m Max depth: 300 m Blueview P900 FOV: 45 Freq: 900 KHz Range: 30 m Max depth: 300 m





10 High- Frequency Mul*beam 3D Sonars Blueview MB1350 FOV: 45 x1 Freq: MHz Max range: 25 m Max depth: 300 m Blueview MB2250 FOV: 78 x1 Freq: MHz Max range: 10 m Max depth: 300 m



11 Low- Frequency Mul*beam 3D Sonar WWII tanker : Empire Gem Torpedoed by U-66 Imagenex Delta T 837B FOV: 120 x3 Freq: 260 KHz Max range: 100 m Max depth: 1000 m Barge: 45 x 10 m




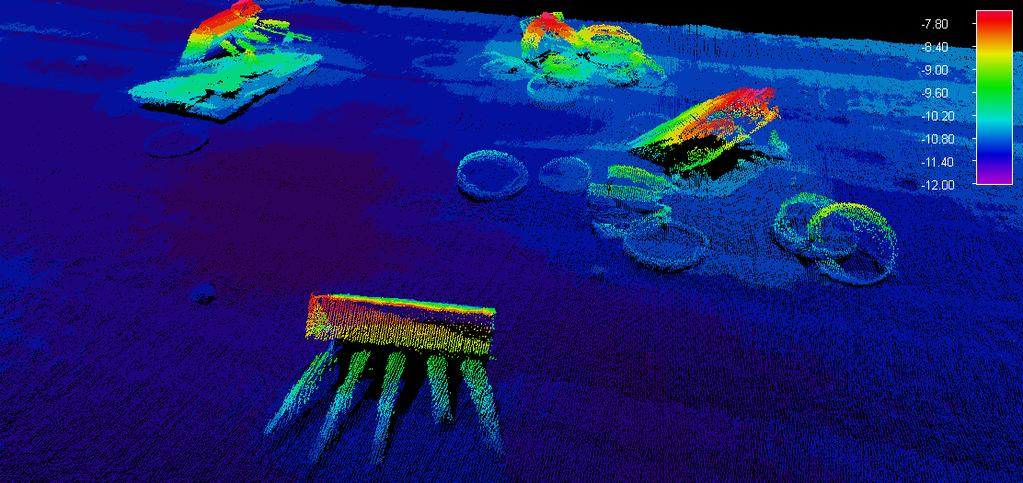
12 Volumetric 3D Sonar Echoscope II FOV: 50 X 50 Freq: 375 KHz Range : 60 m Range res.: 1 cm

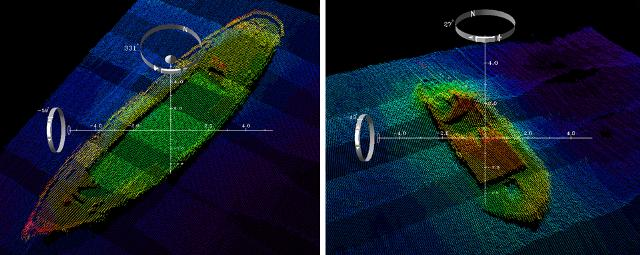
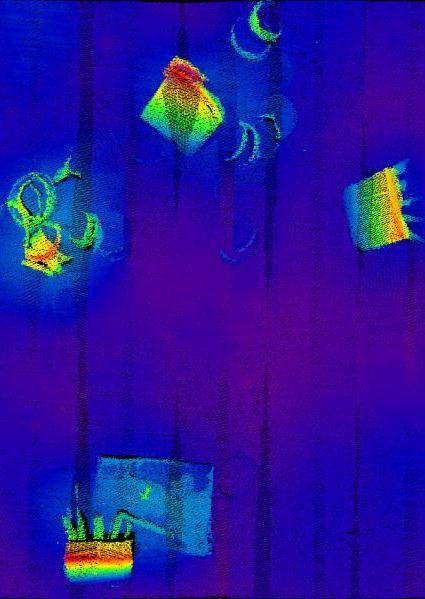
13 SONAR Data Processing Length: 20 m Length: 10 m
 TWIC cards (commercial port access) Personnel with USCG and FCC")
14 Qualifica*ons and Cer*fica*ons Established EH&S protocols NEPA environmental assessment DoD security clearances First aid / CPR /AED training Crane- and rigging- qualified HAZWOPER & hazardous material shipping STCW- BST (Coast Guard- approved Basic Safety Training) TWIC cards (commercial port access) Personnel with USCG and FCC licenses
15 Developer Support Tools Underwater pressure vessel design (metal & plas*c PV available) Data acquisi*on systems available (A/D, DIO, RS- 232 etc.) Custom soqware Data acquisi*on and display Real *me web based data viewers GIS support- data product development 3D visualiza*on soqware (Fledermaus) Custom video logging and processing Custom sonar acquisi*on & processing Survey grade underwater naviga*on sensors (RLG, INS, DVL etc.) Survey grade topside naviga*on systems (F190- HP, Starlink 210S) Underwater video systems Opera*ons planning and logis*cal support
16 MarOps Clients ONR: mine counter- measures and sonar survey technologies ESTCP: support for underwater surveying of inert UXO NOAA: surveys of ship wrecks NOAA: fisheries survey support Field support for Navy tes*ng of diver detec*on systems More
17 Underwater Technology Demonstra*on Site Site has an established NEPA environmental assessment Easy access from support facili*es Local logis*cal support staff Less weather- sensi*ve than open ocean sites Calibra*on areas with known targets in charted loca*ons Blind test areas with cludered and clear environments Other customiza*ons to meet special requirements

18 Common Tampa Bay Test Areas NOAA Chart Cluttered Area Mud bottom (Construction debris) Uncluttered Area Mud bottom Port of St. Petersburg SRI Dock Uncluttered sandy firm bottom Soundings in feet
19 Contact SRI Marine Opera)ons: John Kloske SRI Interna)onal th Avenue SE St Petersburg, FL john.kloske@sri.com Shop: Cell:
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks
 In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
1.0 PURPOSE AND NEED
 1.0 PURPOSE AND NEED 1.0 PURPOSE OF AND NEED FOR THE PROPOSED ACTION 1.1 INTRODUCTION The National Environmental Policy Act (NEPA) of 1969, as amended (42 United States Code Section 4321 et seq.); the
1.0 PURPOSE AND NEED 1.0 PURPOSE OF AND NEED FOR THE PROPOSED ACTION 1.1 INTRODUCTION The National Environmental Policy Act (NEPA) of 1969, as amended (42 United States Code Section 4321 et seq.); the
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
ACCESS the BLUE ECONOMY ALL OCEANS Engineering Ltd
 Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Final Cruise Report Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, April, 2011
 213 APPENDIX I. Cruise Report, Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, August 12, 2011 Final Cruise Report Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, 26-27 April,
213 APPENDIX I. Cruise Report, Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, August 12, 2011 Final Cruise Report Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, 26-27 April,
Kennedy Point Mari.me INTRODUCTION OUPV
 INTRODUCTION OUPV OUPV is the first exam in a series that leads to a deck officers license, typically referred as a master or mates license: 25 ton, 50 ton, 100 ton, 200 ton, 500 ton, 1600 ton, and Unlimited.
INTRODUCTION OUPV OUPV is the first exam in a series that leads to a deck officers license, typically referred as a master or mates license: 25 ton, 50 ton, 100 ton, 200 ton, 500 ton, 1600 ton, and Unlimited.
Summary of 2017 Alvin Debriefs. 4 cruises, 4 debriefs, 4 PCARs
 Summary of 2017 Alvin Debriefs 4 cruises, 4 debriefs, 4 PCARs Alvin Debrief Highlights Overall, PIs were pleased with the performance and capabili=es of the Alvin, with most of the objec=ves accomplished.
Summary of 2017 Alvin Debriefs 4 cruises, 4 debriefs, 4 PCARs Alvin Debrief Highlights Overall, PIs were pleased with the performance and capabili=es of the Alvin, with most of the objec=ves accomplished.
ATON System Workshop
 ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
 Side 1 av 7 Home > Diving Equipment > Side Scan Sonar > Imagenex Sidescan Sonar > Yellowfin Yellowfin Sidescan Sonar Magnetometers Side Scan Sonar Cameras Storm Cases Interferometric & Sidescan Equipment
Side 1 av 7 Home > Diving Equipment > Side Scan Sonar > Imagenex Sidescan Sonar > Yellowfin Yellowfin Sidescan Sonar Magnetometers Side Scan Sonar Cameras Storm Cases Interferometric & Sidescan Equipment
S.S. MONTEBELLO Assessment Radiation Detection Case Study
 S.S. MONTEBELLO Assessment Radiation Detection Case Study Specifications Owner: Union Company of California Launched: San Pedro, CA - January 1921 Tonnage: 6010 (Underdeck) Dimensions: 440 ft (Registered)
S.S. MONTEBELLO Assessment Radiation Detection Case Study Specifications Owner: Union Company of California Launched: San Pedro, CA - January 1921 Tonnage: 6010 (Underdeck) Dimensions: 440 ft (Registered)
Summary of AUV Sentry Debriefs 6 Cruises, 6 Debriefs and 4 PCARs
 Summary of 2016 AUV Sentry Debriefs 6 Cruises, 6 Debriefs and 4 PCARs Sentry late 2015 & 2016 PCARs (4 cruises, 6 PIs) objectives 6 6 5 7.2 pre-cruise 7.0 science party.7 vehicle 6 7 7 7.7 safety.7 EL.
Summary of 2016 AUV Sentry Debriefs 6 Cruises, 6 Debriefs and 4 PCARs Sentry late 2015 & 2016 PCARs (4 cruises, 6 PIs) objectives 6 6 5 7.2 pre-cruise 7.0 science party.7 vehicle 6 7 7 7.7 safety.7 EL.
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Autonomous Underwater Vehicles Explorer Class
 Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS?
 www.cns-international.com CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS? EMRA 14 Workshop CNR, Rome June, 09 th 10 th 2014 CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY
www.cns-international.com CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS? EMRA 14 Workshop CNR, Rome June, 09 th 10 th 2014 CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities
 Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
Testing and Evaluation of REMUS Vehicle Systems
 Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions
 Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
UXO Below: Mitigating Marine UXO Risk
 RPS Energy Ltd Explosives Engineering Services UXO Below: Mitigating Marine UXO Risk Presented by Victoria Phillips 1 Aim To deliver an overview of Unexploded Ordnance (UXO) in the marine environment,
RPS Energy Ltd Explosives Engineering Services UXO Below: Mitigating Marine UXO Risk Presented by Victoria Phillips 1 Aim To deliver an overview of Unexploded Ordnance (UXO) in the marine environment,
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
Copicut Reservoir Sidescan Sonar. Fall River, MA May 7, 2013
 Copicut Reservoir Sidescan Sonar Fall River, MA May 7, 2013 1 Table of Contents Section 1: Mission Overview... 3 Background... 3 Vehicle General Information... 3 Vehicle Mission Details... 4 Area of Operation...
Copicut Reservoir Sidescan Sonar Fall River, MA May 7, 2013 1 Table of Contents Section 1: Mission Overview... 3 Background... 3 Vehicle General Information... 3 Vehicle Mission Details... 4 Area of Operation...
S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed.
 S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed. - Operating depth 300 m (500 m optional) - Cruising speed up to 4 knots
S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed. - Operating depth 300 m (500 m optional) - Cruising speed up to 4 knots
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico.
 Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
The I-UTECH Consortium
 The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
SUCCESSFUL GEAR RECOVERY Lessons from Puget Sound
 APEC MARINE DEBRIS SEMINAR SUCCESSFUL GEAR RECOVERY Lessons from Puget Sound Jeff June, Project Manager Joe Schmitt & Gary Wood JD Northwest Straits Commission Washington State, U.S. The Northwest Straits
APEC MARINE DEBRIS SEMINAR SUCCESSFUL GEAR RECOVERY Lessons from Puget Sound Jeff June, Project Manager Joe Schmitt & Gary Wood JD Northwest Straits Commission Washington State, U.S. The Northwest Straits
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY
 THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Fully Submersible Heavy Lift Vessel
 Fully Submersible Heavy Lift Vessel Arnbjorn Joensen Aberdeen Maritime Branch (28th January 2015) PRESENTATION Introduction to the Subsea Deployment Vessel Installation method Tank test video Potential
Fully Submersible Heavy Lift Vessel Arnbjorn Joensen Aberdeen Maritime Branch (28th January 2015) PRESENTATION Introduction to the Subsea Deployment Vessel Installation method Tank test video Potential
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
SHUTTLE-SUBs ALL OCEANS Engineering Ltd
 SUK Underwater Vehicles Conference 21.11.17 SHUTTLE-SUBs AC-ROV 3000m Fly-out System Introduced in 2011 MAC-ROV 6000m Fly-out System (2017) 6000m, 4k and HD cameras, SM fibre telemetry Expandable architecture,
SUK Underwater Vehicles Conference 21.11.17 SHUTTLE-SUBs AC-ROV 3000m Fly-out System Introduced in 2011 MAC-ROV 6000m Fly-out System (2017) 6000m, 4k and HD cameras, SM fibre telemetry Expandable architecture,
TRACK RECORD Navigation, positioning and survey services
 2011-2013 Navigation, positioning and survey services August 2013 Nam Chau Building 180-182 Nguyen Van Troi Str., Ward 4 Vung Tau, Vietnam DATE CUSTOMER SERVICES PERSONNEL AND EQUIPMENT 2013 August PTSG
2011-2013 Navigation, positioning and survey services August 2013 Nam Chau Building 180-182 Nguyen Van Troi Str., Ward 4 Vung Tau, Vietnam DATE CUSTOMER SERVICES PERSONNEL AND EQUIPMENT 2013 August PTSG
Commercial Offshore Supply Vessel (OSV) To Arc8c Capable T- ATS(X) Replacement
 To Arc8c Capable T- ATS(X) Replacement") Conversion Design Project Commercial Offshore Supply Vessel (OSV) To Arc8c Capable T- ATS(X) Replacement 2.704 Projects in Naval Ship Conversion Arthur Anderson Ben Sanfiorenzo David Jurkiewicz Thanks
Conversion Design Project Commercial Offshore Supply Vessel (OSV) To Arc8c Capable T- ATS(X) Replacement 2.704 Projects in Naval Ship Conversion Arthur Anderson Ben Sanfiorenzo David Jurkiewicz Thanks
Risk Reduction in Offshore Decommissioning Chevron s Success in the Gulf of Mexico
 Risk Reduction in Offshore Decommissioning Chevron s Success in the Gulf of Mexico Lew Dennis Decommissioning Manager Chevron Gulf of Mexico Business Unit 1 Key Messages Focusing on Risk Reduction in Decommissioning
Risk Reduction in Offshore Decommissioning Chevron s Success in the Gulf of Mexico Lew Dennis Decommissioning Manager Chevron Gulf of Mexico Business Unit 1 Key Messages Focusing on Risk Reduction in Decommissioning
35 years of unparalleled support to the offshore oil and gas industry.
 35 years of unparalleled support to the offshore oil and gas industry. Offshore Construction Commercial Diving Cable Laying Remotely Operated Vehicles (ROV s) Marine Services I.R.M. ABOUT US CCC (Underwater
35 years of unparalleled support to the offshore oil and gas industry. Offshore Construction Commercial Diving Cable Laying Remotely Operated Vehicles (ROV s) Marine Services I.R.M. ABOUT US CCC (Underwater
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Isis Deployment. TMS and Live Boating. Inmartech08. Dave Turner Operations Co-ordinator.
 Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
XRAY GLIDER Underwater Video Cruise Plan May 21, 22, 23, 2007 R. G. Sproul
 XRAY GLIDER Underwater Video Cruise Plan May 21, 22, 23, 2007 R. G. Sproul Purpose The ONR program manager for the XRAY/Liberdade underwater flying wing glider has requested that an underwater video of
XRAY GLIDER Underwater Video Cruise Plan May 21, 22, 23, 2007 R. G. Sproul Purpose The ONR program manager for the XRAY/Liberdade underwater flying wing glider has requested that an underwater video of
Argentine Navy ARA San Juan (S-42) Search 2018
 Search 2018") Daily Status Report: OI Seabed Constructor 22.09.18 Key Developments; Next 24hrs; 11:32hrs LT Perform cargo transfer (2x Edge Tech Bottles etc) with ARA Admiral Brown. Acoustically maintained AUV Fleet(5)
Daily Status Report: OI Seabed Constructor 22.09.18 Key Developments; Next 24hrs; 11:32hrs LT Perform cargo transfer (2x Edge Tech Bottles etc) with ARA Admiral Brown. Acoustically maintained AUV Fleet(5)
MISSION PLANNING AND DATA ACQUISITION SOFTWARE
 MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
Hydrographic Surveying at The Port of London
 Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
PO Box 2723, 4 Strand Street, Port Alfred, Eastern Cape, South Africa Contact number : Office (9-12pm)
") Company Profile General Business Information SAROV CC (South African Remotely Operated Vehicles) PO Box 2723, 4 Strand Street, Port Alfred, Eastern Cape, South Africa 6170 Contact number : Office +27 46
Company Profile General Business Information SAROV CC (South African Remotely Operated Vehicles) PO Box 2723, 4 Strand Street, Port Alfred, Eastern Cape, South Africa 6170 Contact number : Office +27 46
SeaBotix Remotely Operated Vehicles
 Teledyne SeaBotix Product Overview Brochure SeaBotix Remotely Operated Vehicles Little Benthic Vehicles PROVEN CAPABLE RELIABLE ADAPTABLE PORTABLE INTUITIVE RUGGED Little Benthic Vehicles LEADING THE INDUSTRY
Teledyne SeaBotix Product Overview Brochure SeaBotix Remotely Operated Vehicles Little Benthic Vehicles PROVEN CAPABLE RELIABLE ADAPTABLE PORTABLE INTUITIVE RUGGED Little Benthic Vehicles LEADING THE INDUSTRY
August Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd.
 August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd. Gavia? Gavia immer (common loon; great northern diver) Autonomous
August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd. Gavia? Gavia immer (common loon; great northern diver) Autonomous
Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results
 Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results J. Vaganay, M. Elkins, D. Esposito, W. O Halloran (1) F. Hover, M. Kokko (2) Bluefin Robotics Corporation (1) Massachusetts Institute
Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results J. Vaganay, M. Elkins, D. Esposito, W. O Halloran (1) F. Hover, M. Kokko (2) Bluefin Robotics Corporation (1) Massachusetts Institute
OVERVIEW. Capabilities & Services
 +1.713.467.0505 Sales@boamarine.com www.boamarine.com OVERVIEW Capabilities & Services BOA MARINE SERVICES provides engineering, construction and contracting services related to fi xed and fl oating offshore
+1.713.467.0505 Sales@boamarine.com www.boamarine.com OVERVIEW Capabilities & Services BOA MARINE SERVICES provides engineering, construction and contracting services related to fi xed and fl oating offshore
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010)
") RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
MODEL DIGITAL ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.5 TO 100FT (0.15 TO 30M) OPERATING RANGE SERIAL OUTPUT
 OPERATING RANGE SERIAL OUTPUT") MODEL 863-000-200 DIGITAL ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.5 TO 100FT (0.15 TO 30M) OPERATING RANGE SERIAL OUTPUT DOCUMENT NO. 430-017C April 14, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875
MODEL 863-000-200 DIGITAL ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.5 TO 100FT (0.15 TO 30M) OPERATING RANGE SERIAL OUTPUT DOCUMENT NO. 430-017C April 14, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875
KAIREI Cruise Report. KR17-11 Leg2
 KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
APPLICATIONS ROV & AUV SEISMIC PRODUCTION SYSTEMS DOWNHOLE JUMPER & CABLE SYSTEMS DRILLING CONTROL
 APPLICATIONS ROV & AUV SEISMIC PRODUCTION SYSTEMS DOWNHOLE JUMPER & CABLE SYSTEMS DRILLING CONTROL ROV & AUV PRODUCTS GRE (Glass Reinforced Epoxy) CS-MS 55 & 66 SERIES MINI-CON HUMMER GLOBE-CON ALL-WET
APPLICATIONS ROV & AUV SEISMIC PRODUCTION SYSTEMS DOWNHOLE JUMPER & CABLE SYSTEMS DRILLING CONTROL ROV & AUV PRODUCTS GRE (Glass Reinforced Epoxy) CS-MS 55 & 66 SERIES MINI-CON HUMMER GLOBE-CON ALL-WET
With a team of highly qualified divers Vision offers a wide range of services including;
 Commercial Diving Services With a team of highly qualified divers Vision offers a wide range of services including; Civils Diving Services Inspections, Construction and maintenance on bridges, piles, quay
Commercial Diving Services With a team of highly qualified divers Vision offers a wide range of services including; Civils Diving Services Inspections, Construction and maintenance on bridges, piles, quay
MODEL ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT
 MODEL 862-000-200 ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT DOCUMENT NO. 430-007H September 20, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875 BROADWAY
MODEL 862-000-200 ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT DOCUMENT NO. 430-007H September 20, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875 BROADWAY
Admiralty Inlet Pilot Tidal Project FERC No Appendix C. Derelict Gear Monitoring Plan
 Appendix C Derelict Gear Monitoring Plan ADMIRALTY INLET PILOT TIDAL PROJECT FERC PROJECT NO. 12690 DERELICT GEAR MONITORING PLAN (submitted with the Final Application for a New Pilot Project License)
Appendix C Derelict Gear Monitoring Plan ADMIRALTY INLET PILOT TIDAL PROJECT FERC PROJECT NO. 12690 DERELICT GEAR MONITORING PLAN (submitted with the Final Application for a New Pilot Project License)
 A world class exploration, research, work platform and team Search and Recovery of Lost Equipment 560FSW Mission Global Underwater Explorers (GUE) is a non profit 501 c(3) fiscal sponsor of Project Baseline.
A world class exploration, research, work platform and team Search and Recovery of Lost Equipment 560FSW Mission Global Underwater Explorers (GUE) is a non profit 501 c(3) fiscal sponsor of Project Baseline.
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY
 THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300. Wolfgang Burnside
 The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300 Wolfgang Burnside TRV-005 Series: Standard Features and Benefits Frame The TRV 005 Series
The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300 Wolfgang Burnside TRV-005 Series: Standard Features and Benefits Frame The TRV 005 Series
OTTO CANDIES, L.L.C Hwy. 90 Des Allemands, LA M/V WYATT CANDIES. God Bless America
 17271 Hwy. 90 Des Allemands, LA 70030 504 469 7700 WWW.OTTOCANDIES.COM M/V WYATT CANDIES Made in the U.S.A. God Bless America Classification and Flag U.S. Flagged Jones Act Compliant Class society: Class
17271 Hwy. 90 Des Allemands, LA 70030 504 469 7700 WWW.OTTOCANDIES.COM M/V WYATT CANDIES Made in the U.S.A. God Bless America Classification and Flag U.S. Flagged Jones Act Compliant Class society: Class
R/V Point Sur Pre-Cruise Questionnaire
 R/V Point Sur Pre-Cruise Questionnaire Please fill this out and return at least 40 days prior to your cruise to ensure that all of your technical needs can be met BASIC INFO Purpose of Cruise: Submitter's
R/V Point Sur Pre-Cruise Questionnaire Please fill this out and return at least 40 days prior to your cruise to ensure that all of your technical needs can be met BASIC INFO Purpose of Cruise: Submitter's
Dive Operations Plan for Personal Submersibles. Revision
 Dive Operations Plan for Personal Submersibles Revision 2011.1 1 Table of Contents 1 EVENT...3 1.1 Summary of planned dive...3 1.1.1 PSUBS Guidelines...3 1.1.2 Maximum dive depth planned...3 1.1.3 Number
Dive Operations Plan for Personal Submersibles Revision 2011.1 1 Table of Contents 1 EVENT...3 1.1 Summary of planned dive...3 1.1.1 PSUBS Guidelines...3 1.1.2 Maximum dive depth planned...3 1.1.3 Number
Simulation and In-water Testing of the Mid-Sized Autonomous Research Vehicle (MARV) Thomas Fulton NUWC Newport
 Thomas Fulton NUWC Newport") Simulation and In-water Testing of the Mid-Sized Autonomous Research Vehicle (MARV) Thomas Fulton NUWC Newport Unmanned Maritime Vehicle T&E Conference June 14-16, 2005 Agenda MARV overview MARV as a T&E
Simulation and In-water Testing of the Mid-Sized Autonomous Research Vehicle (MARV) Thomas Fulton NUWC Newport Unmanned Maritime Vehicle T&E Conference June 14-16, 2005 Agenda MARV overview MARV as a T&E
New Jersey Division of Fish, Game and Wildlife Excerpts from REEF NEWS 1998
 New Jersey Division of Fish, Game and Wildlife Excerpts from REEF NEWS 1998 OBJECTIVES OF THE REEF PROGRAM New Jersey's Reef Program is administered by the DEP's Division of Fish, Game and Wildlife. The
New Jersey Division of Fish, Game and Wildlife Excerpts from REEF NEWS 1998 OBJECTIVES OF THE REEF PROGRAM New Jersey's Reef Program is administered by the DEP's Division of Fish, Game and Wildlife. The
APPLICANT: Pacific Northwest National Laboratory Attention: Mr. Charles Brandt 1529 West Sequim Bay Road Sequim, Washington 98382
 US Army Corps of Engineers Seattle District Joint Public Notice Application for a Department of the Army Permit and a Washington Department of Ecology Water Quality Certification and/or Coastal Zone Management
US Army Corps of Engineers Seattle District Joint Public Notice Application for a Department of the Army Permit and a Washington Department of Ecology Water Quality Certification and/or Coastal Zone Management
Country report - India NATIONAL INSTITUTE OF OCEAN TECHNOLOGY 07/10/2010
 Country report - India NATIONAL INSTITUTE OF OCEAN TECHNOLOGY 07/10/2010 XXVI DBCP meeting 28 September 2010 Department of Civil Engineering, NIT Trichy 2 FOCUS 1/5 of world population 50 % living along
Country report - India NATIONAL INSTITUTE OF OCEAN TECHNOLOGY 07/10/2010 XXVI DBCP meeting 28 September 2010 Department of Civil Engineering, NIT Trichy 2 FOCUS 1/5 of world population 50 % living along
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
Update on Canadian Research Vessels Ship Procurement Projects
 Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science
 Moorings: New Capabilities for Seagoing Science") Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
ARG Mooring Deployment
 ARG Mooring Deployment The acoustic releases are lifted over the stern during the mooring deployment. The mooring deployment was scheduled for early November as the rainy season in southwestern Greece
ARG Mooring Deployment The acoustic releases are lifted over the stern during the mooring deployment. The mooring deployment was scheduled for early November as the rainy season in southwestern Greece
R/V HUGH R. SHARP University of Delaware 2016
 R/V HUGH R. SHARP R/V HUGH R. SHARP University of Delaware 2016 GENERAL DESCRIPTION: The R/V HUGH R. SHARP is an acoustically quiet, state of the art, general-purpose, regional class research vessel operated
R/V HUGH R. SHARP R/V HUGH R. SHARP University of Delaware 2016 GENERAL DESCRIPTION: The R/V HUGH R. SHARP is an acoustically quiet, state of the art, general-purpose, regional class research vessel operated
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles
 Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
LOCAL NOTICE TO MARINERS
 USCG Notice to Mariners 3/7/18 (View full Notice here) LNM 10/18 Coast Guard District 1: U.S. Department of Homeland Security United States Coast Guard LOCAL NOTICE TO MARINERS COASTAL WATERS FROM EASTPORT,
USCG Notice to Mariners 3/7/18 (View full Notice here) LNM 10/18 Coast Guard District 1: U.S. Department of Homeland Security United States Coast Guard LOCAL NOTICE TO MARINERS COASTAL WATERS FROM EASTPORT,
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE.
 EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
Cruise Report Marine Mammal and Sea Turtle Observer UNDET Monitoring Hawaii Range Complex: 3 April 2014
 January 15, 2015 Cruise Report Marine Mammal and Sea Turtle Observer UNDET Monitoring Hawaii Range Complex: 3 April 2014 Prepared for: Commander, U.S. Pacific Fleet Prepared by: Naval Facilities Engineering
January 15, 2015 Cruise Report Marine Mammal and Sea Turtle Observer UNDET Monitoring Hawaii Range Complex: 3 April 2014 Prepared for: Commander, U.S. Pacific Fleet Prepared by: Naval Facilities Engineering
DISENTANGLEMENT RESPONSE CHECKLIST
 A. Awareness Stage: DISENTANGLEMENT RESPONSE CHECKLIST Receive report. Ask reporting source to provide information on entangled animal. Follow and fill out Entanglement Reporting Form. (It is essential
A. Awareness Stage: DISENTANGLEMENT RESPONSE CHECKLIST Receive report. Ask reporting source to provide information on entangled animal. Follow and fill out Entanglement Reporting Form. (It is essential
ADL Attachment 1
 (formerly) 106502 Kina Cove A reapplication for an expired lease. The type of commercial use is identical to that previously. The immediate off-shore tidelands will be used to dump, raft, and store round
(formerly) 106502 Kina Cove A reapplication for an expired lease. The type of commercial use is identical to that previously. The immediate off-shore tidelands will be used to dump, raft, and store round
A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV
 A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV Robert Damus, Samuel Desset, James Morash, Victor Polidoro Autonomous Underwater Vehicles Lab, Massachusetts Institute of Technology,
A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV Robert Damus, Samuel Desset, James Morash, Victor Polidoro Autonomous Underwater Vehicles Lab, Massachusetts Institute of Technology,
Entry Level Requirements and Basic Introductory Course Outline for New Remotely Operated Vehicle (ROV) Personnel
 Personnel") AB Entry Level Requirements and Basic Introductory Course Outline for New Remotely Operated Vehicle (ROV) Personnel International Marine Contractors Association www.imca-int.com IMCA R 002 Rev. 2 May 2009
AB Entry Level Requirements and Basic Introductory Course Outline for New Remotely Operated Vehicle (ROV) Personnel International Marine Contractors Association www.imca-int.com IMCA R 002 Rev. 2 May 2009
Nearshore Dredged Material Placement Pilot Study at Noyo Harbor, CA
 1 Nearshore Dredged Material Placement Pilot Study at Noyo Harbor, CA Noyo Cove N 2011 National Conference on Beach Preservation Technology 9-11, February 2011 Lihwa Lin, Honghai Li, Mitchell Brown US
1 Nearshore Dredged Material Placement Pilot Study at Noyo Harbor, CA Noyo Cove N 2011 National Conference on Beach Preservation Technology 9-11, February 2011 Lihwa Lin, Honghai Li, Mitchell Brown US