Uninformed search strategies
|
|
|
- Valentine West
- 5 years ago
- Views:
Transcription
1 AIMA sections 3.4,3.5 search use only the information available in the problem denition Breadth-rst search Uniform-cost search Depth-rst search Depth-limited search Iterative deepening search


2 Breadth-rst search Expand shallowest unexpanded node Implementation: fringe is a FIFO queue, i.e., new successors go at end Breadth-rst search Expand shallowest unexpanded node Implementation: fringe is a FIFO queue, i.e., new successors go at end


3 Breadth-rst search Expand shallowest unexpanded node Implementation: fringe is a FIFO queue, i.e., new successors go at end Breadth-rst search Expand shallowest unexpanded node Implementation: fringe is a FIFO queue, i.e., new successors go at end
4 Properties of breadth-rst search Complete?? Yes (if b is nite) Time?? 1 + b + b 2 + b b d + b(b d 1) = O(b d+1 ), i.e., exp. in d Space?? O(b d+1 ) (keeps every node in memory) Optimal?? Yes (if cost = 1 per step); not optimal in general Space is the big problem; can easily generate nodes at 100MB/sec so 24hrs = 8640GB. Uniform cost search Expand least-cost unexpanded node (i.e., minimum step cost) Implementation: fringe = queue ordered by path cost, lowest rst Equivalent to breadth-rst if step costs all equal Complete?? Yes, if step cost ɛ Time?? # of nodes with g cost of optimal solution, O(b C /ɛ ) where C is the cost of the optimal solution Space?? # of nodes with g cost of optimal solution, O(b C /ɛ ) Optimal?? Yesnodes expanded in increasing order of g(n)

: terrible if m is much larger than d but if solutions are dense, may be much faster than")
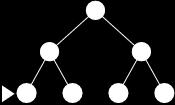
5 Depth-rst search Expand deepest unexpanded node Implementation: fringe = LIFO queue, i.e., put successors at front Properties of depth-rst search Complete?? No: fails in innite-depth spaces, spaces with loops Modify to avoid repeated states along path complete in nite spaces Time?? O(b m ): terrible if m is much larger than d but if solutions are dense, may be much faster than breadth-rst Space?? O(bm), i.e., linear space! Optimal?? No!
6 Depth-limited search DFS + depth limit l: nodes at depth l have no successors Recursive implementation: function Depth-Limited-( problem, limit) returns soln/fail/cuto Recursive-DLS(Make-Node(Initial-State[problem]), problem, limit) function Recursive-DLS(node, problem, limit) returns soln/fail/cuto cuto-occurred? false if Goal-Test(problem, State[node]) then return node else if Depth[node] = limit then return cuto else for each successor in Expand(node, problem) do result Recursive-DLS(successor, problem, limit) if result = cuto then cuto-occurred? true else if result failure then return result if cuto-occurred? then return cuto else return failure Iterative deepening search function Iterative-Deepening-( problem) returns a solution inputs: problem, a problem for depth 0 to do result Depth-Limited-( problem, depth) if result cuto then return result end
7 Iterative deepening search Iterative deepening search


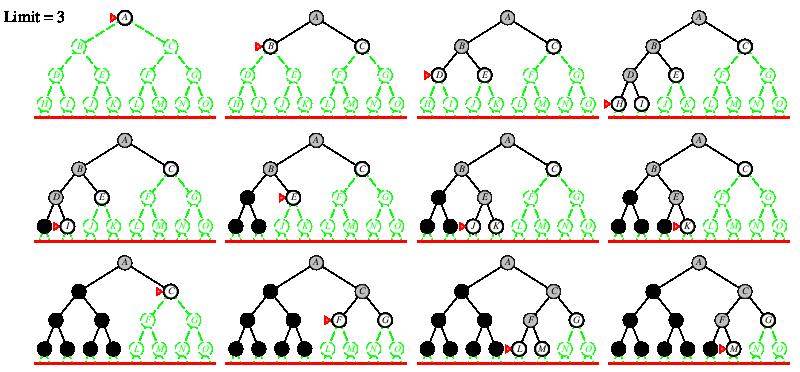
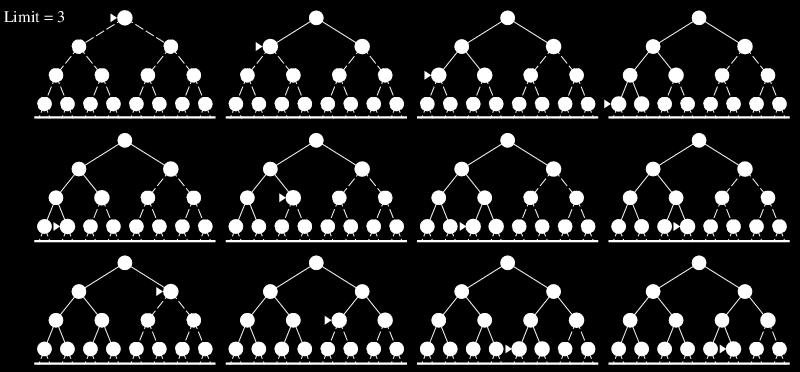
8 Iterative deepening search Iterative deepening search
9 Properties of iterative deepening search Complete?? Yes Time?? (d + 1)b 0 + db 1 + (d 1)b b d = O(b d ) Space?? O(bd) Optimal?? Yes, if step cost = 1 Can be modied to explore uniform-cost tree BFS Vs IDS Numerical comparison for b = 10 and d = 5, solution at far right leaf: N(IDS) = , , , 000 = 123, 456 N(BFS) = , , , , 990 = 1, 111, 101 IDS does better because other nodes at depth d are not expanded BFS can be modied to apply goal test when a node is generated

10 Summary of algorithms Criterion BF UC DF DL ID Complete? Yes Yes, No Yes, if l d Yes Time b d+1 b C /ɛ b m b l b d Space b d+1 b C /ɛ bm bl bd Optimal? Yes Yes No Yes, if l d Yes *: complete if branching factor is nite : complete if step cost is ɛ : optimal if step costs are all identical Repeated states Failure to detect repeated states can turn a linear problem into an exponential one!
11 Graph search function Graph-( problem, fringe) returns a solution, or failure closed an empty set fringe Insert(Make-Node(Initial-State[problem]), fringe) loop do end if fringe is empty then return failure node Remove-Front(fringe) if Goal-Test(problem, State[node]) then return node if State[node] is not in closed then add State[node] to closed fringe InsertAll(Expand(node, problem), fringe) Summary Variety of uninformed search Iterative deepening search uses only linear space and not much more time than other uninformed algorithms Graph search can be exponentially more ecient than tree search
12 Exercise: Space Dimension BFS vs IDS Assume: i) a well balanced search tree; ii) the goal state is the last one to be expanded in its level (e.g., the rightmost). if the branching factor is 3, the shallowest goal state is at depth 3 (root has depth 0) and we proceed breadth rst how many nodes are generated? if the branching factor is 4, the shallowest goal state is at depth 3 (root has depth 0) we proceed with an iterative deepening approach, how many nodes are generated? what happens if goal test is performed when inserting in the fringe instead of when removing (as it is in tree-search)? Exercise: formalizing and solving problem through search The Wolf Sheep and Cabbage Problem A man owns a wolf, a sheep and a cabbage: He is on a river bank with a boat that can carry him with only one of his goodies at a time. The man wants to reach the other bank with his wolf, sheep and cabbage, but he knows that wolves eat sheeps, and sheeps eat cabbages, so he cannot leave them alone on a bank. Formalize the WSC problem as a search problem Use breadth rst to nd a solution
13 Exercise: formalizing and solving problem through search The Missionaries and Cannibals Three missionaries and three cannibals are on the same river bank, and want to cross it. They have a boat that can carry two people at most. Cannibals should never outnumber missionaries, on any bank, as they could eat them. Formalize the MC problem as a search problem Give a solution
Uninformed Search Strategies
 Uninformed Search Strategies Instructor: Dr. Wei Ding Fall 2010 1 Uninformed Search Strategies Also called blind search. Have no additional information about states beyond that provided in the problem
Uninformed Search Strategies Instructor: Dr. Wei Ding Fall 2010 1 Uninformed Search Strategies Also called blind search. Have no additional information about states beyond that provided in the problem
Solving Problems by Searching chap3 1. Problem-Solving Agents
 Chapter3 Solving Problems by Searching 20070315 chap3 1 Problem-Solving Agents Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving
Chapter3 Solving Problems by Searching 20070315 chap3 1 Problem-Solving Agents Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART2) PROBLEM SOLVING AND SEARCH (Course coordinator) Searching
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART2) PROBLEM SOLVING AND SEARCH (Course coordinator) Searching
Artificial Intelligence. Uninformed Search Strategies
 Artificial Intelligence Uninformed search strategies Uninformed Search Strategies Uninformed strategies use only the information available in the problem definition Also called Blind Search No info on
Artificial Intelligence Uninformed search strategies Uninformed Search Strategies Uninformed strategies use only the information available in the problem definition Also called Blind Search No info on
Uninformed Search (Ch )
") 1 Uninformed Search (Ch. 3-3.4) 7 Small examples 8-Queens: how to fit 8 queens on a 8x8 board so no 2 queens can capture each other Two ways to model this: Incremental = each action is to add a queen to
1 Uninformed Search (Ch. 3-3.4) 7 Small examples 8-Queens: how to fit 8 queens on a 8x8 board so no 2 queens can capture each other Two ways to model this: Incremental = each action is to add a queen to
Uninformed search methods II.
 CS 1571 Introduction to AI Lecture 5 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Uninformed methods Uninformed search methods use only information available in
CS 1571 Introduction to AI Lecture 5 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Uninformed methods Uninformed search methods use only information available in
Real World Search Problems. CS 331: Artificial Intelligence Uninformed Search. Simpler Search Problems. Example: Oregon. Search Problem Formulation
 Real World Search Problems S 331: rtificial Intelligence Uninformed Search 1 2 Simpler Search Problems ssumptions bout Our Environment Fully Observable Deterministic Sequential Static Discrete Single-agent
Real World Search Problems S 331: rtificial Intelligence Uninformed Search 1 2 Simpler Search Problems ssumptions bout Our Environment Fully Observable Deterministic Sequential Static Discrete Single-agent
Uninformed Search (Ch )
") 1 Uninformed Search (Ch. 3-3.4) 3 Terminology review State: a representation of a possible configuration of our problem Action: -how our agent interacts with the problem -can be different depending on
1 Uninformed Search (Ch. 3-3.4) 3 Terminology review State: a representation of a possible configuration of our problem Action: -how our agent interacts with the problem -can be different depending on
CSE 3401: Intro to AI & LP Uninformed Search II
 CSE 3401: Intro to AI & LP Uninformed Search II Required Readings: R & N Chapter 3, Sec. 1-4. 1 {Arad}, {Zerind, Timisoara, Sibiu}, {Zerind, Timisoara, Arad, Oradea, Fagaras, RimnicuVilcea }, {Zerind,
CSE 3401: Intro to AI & LP Uninformed Search II Required Readings: R & N Chapter 3, Sec. 1-4. 1 {Arad}, {Zerind, Timisoara, Sibiu}, {Zerind, Timisoara, Arad, Oradea, Fagaras, RimnicuVilcea }, {Zerind,
Uninformed search methods
 Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before the lecture Report and programming
Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before the lecture Report and programming
Problem Solving Agents
 Problem Solving Agents A problem solving agent is one which decides what actions and states to consider in completing a goal Examples: Finding the shortest path from one city to another 8-puzzle Problem
Problem Solving Agents A problem solving agent is one which decides what actions and states to consider in completing a goal Examples: Finding the shortest path from one city to another 8-puzzle Problem
Problem Solving as Search - I
 Problem Solving as Search - I Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University Slides prepared from Artificial Intelligence A Modern approach by Russell & Norvig Problem-Solving
Problem Solving as Search - I Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University Slides prepared from Artificial Intelligence A Modern approach by Russell & Norvig Problem-Solving
Search I. Tuomas Sandholm Carnegie Mellon University Computer Science Department. [Read Russell & Norvig Chapter 3]
![Search I. Tuomas Sandholm Carnegie Mellon University Computer Science Department. [Read Russell & Norvig Chapter 3]](/thumbs/84/90666740.jpg "Search I. Tuomas Sandholm Carnegie Mellon University Computer Science Department. [Read Russell & Norvig Chapter 3]") Search I Tuomas Sandholm Carnegie Mellon University Computer Science Department [Read Russell & Norvig Chapter 3] Search I Goal-based agent (problem solving agent) Goal formulation (from preferences).
Search I Tuomas Sandholm Carnegie Mellon University Computer Science Department [Read Russell & Norvig Chapter 3] Search I Goal-based agent (problem solving agent) Goal formulation (from preferences).
Uninformed search methods
 Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework 1 Access through the course web page http://www.cs.pitt.edu/~milos/courses/cs2710/ Two
Lecture 3 Uninformed search methods Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework 1 Access through the course web page http://www.cs.pitt.edu/~milos/courses/cs2710/ Two
COMP9414: Artificial Intelligence Uninformed Search
 COMP9, Monday March, 0 Uninformed Search COMP9: Artificial Intelligence Uninformed Search Overview Breadth-First Search Uniform Cost Search Wayne Wobcke Room J- wobcke@cse.unsw.edu.au Based on slides by
COMP9, Monday March, 0 Uninformed Search COMP9: Artificial Intelligence Uninformed Search Overview Breadth-First Search Uniform Cost Search Wayne Wobcke Room J- wobcke@cse.unsw.edu.au Based on slides by
Representation. Representation. Representation. Representation. 8 puzzle.
 You have a 3-liter jug and a 4-liter jug, and need to measure out exactly two liters of water. the jugs do not have any measurement lines you don't have any additional containers 8 puzzle. Measuring water.
You have a 3-liter jug and a 4-liter jug, and need to measure out exactly two liters of water. the jugs do not have any measurement lines you don't have any additional containers 8 puzzle. Measuring water.
Better Search Improved Uninformed Search CIS 32
 Better Search Improved Uninformed Search CIS 32 Functionally PROJECT 1: Lunar Lander Game - Demo + Concept - Open-Ended: No One Solution - Menu of Point Options - Get Started NOW!!! - Demo After Spring
Better Search Improved Uninformed Search CIS 32 Functionally PROJECT 1: Lunar Lander Game - Demo + Concept - Open-Ended: No One Solution - Menu of Point Options - Get Started NOW!!! - Demo After Spring
CSE 3402: Intro to Artificial Intelligence Uninformed Search II
 CSE 3402: Intro to Artificial Intelligence Uninformed Search II Required Readings: Chapter 3, Sec. 1-4. 1 {Arad}, {Zerind, Timisoara, Sibiu}, {Zerind, Timisoara, Arad, Oradea, Fagaras, RimnicuVilcea },
CSE 3402: Intro to Artificial Intelligence Uninformed Search II Required Readings: Chapter 3, Sec. 1-4. 1 {Arad}, {Zerind, Timisoara, Sibiu}, {Zerind, Timisoara, Arad, Oradea, Fagaras, RimnicuVilcea },
Uninformed search methods II.
 CS 2710 Foundations of AI Lecture 4 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before
CS 2710 Foundations of AI Lecture 4 Uninformed search methods II. Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Announcements Homework assignment 1 is out Due on Tuesday, September 12, 2017 before
CENG 466 Artificial Intelligence. Lecture 4 Solving Problems by Searching (II)
") CENG 466 Artificial Intelligence Lecture 4 Solving Problems by Searching (II) Topics Search Categories Breadth First Search Uniform Cost Search Depth First Search Depth Limited Search Iterative Deepening
CENG 466 Artificial Intelligence Lecture 4 Solving Problems by Searching (II) Topics Search Categories Breadth First Search Uniform Cost Search Depth First Search Depth Limited Search Iterative Deepening
SEARCH TREE. Generating the children of a node
 SEARCH TREE Node: State in state tree Root node: Top of state tree Children: Nodes that can be reached from a given node in 1 step (1 operator) Expanding: Generating the children of a node Open: Closed:
SEARCH TREE Node: State in state tree Root node: Top of state tree Children: Nodes that can be reached from a given node in 1 step (1 operator) Expanding: Generating the children of a node Open: Closed:
SEARCH SEARCH TREE. Node: State in state tree. Root node: Top of state tree
 Page 1 Page 1 Page 2 SEARCH TREE SEARCH Node: State in state tree Root node: Top of state tree Children: Nodes that can be reached from a given node in 1 step (1 operator) Expanding: Generating the children
Page 1 Page 1 Page 2 SEARCH TREE SEARCH Node: State in state tree Root node: Top of state tree Children: Nodes that can be reached from a given node in 1 step (1 operator) Expanding: Generating the children
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Heuristics & Search Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1 *Slides
CS 4649/7649 Robot Intelligence: Planning Heuristics & Search Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1 *Slides
Introduction. AI and Searching. Simple Example. Simple Example. Now a Bit Harder. From Hammersmith to King s Cross
 Introduction AI and Searching We have seen how models of the environment allow an intelligent agent to dry run scenarios in its head without the need to act Logic allows premises to be tested Machine learning
Introduction AI and Searching We have seen how models of the environment allow an intelligent agent to dry run scenarios in its head without the need to act Logic allows premises to be tested Machine learning
COMP219: Artificial Intelligence. Lecture 8: Combining Search Strategies and Speeding Up
 COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up 1 Overview Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search
COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up 1 Overview Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search
Overview. Depth Limited Search. Depth Limited Search. COMP219: Artificial Intelligence. Lecture 8: Combining Search Strategies and Speeding Up
 COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search cheap
COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search cheap
CSC384: Introduction to Artificial Intelligence. Search
 CSC384: Introduction to Artificial Intelligence Search Chapter 3 of R&N 3 rd edition is very useful reading. Chapter 4 of R&N 3 rd edition is worth reading for enrichment. We ll touch upon some of the
CSC384: Introduction to Artificial Intelligence Search Chapter 3 of R&N 3 rd edition is very useful reading. Chapter 4 of R&N 3 rd edition is worth reading for enrichment. We ll touch upon some of the
SIDDHARTH INSTITUTE OF ENGINEERING & TECHNOLOGY :: PUTTUR (AUTONOMOUS) Siddharth Nagar, Narayanavanam Road QUESTION BANK (DESCRIPTIVE)
 Siddharth Nagar, Narayanavanam Road QUESTION BANK (DESCRIPTIVE)") Subject with Code : Data Structures(16MC806) Course & Specialization: MCA UNIT I Sorting, Searching and Directories 1. Explain how to sort the elements by using insertion sort and derive time complexity
Subject with Code : Data Structures(16MC806) Course & Specialization: MCA UNIT I Sorting, Searching and Directories 1. Explain how to sort the elements by using insertion sort and derive time complexity
Depth-bounded Discrepancy Search
 Depth-bounded Discrepancy Search Toby Walsh* APES Group, Department of Computer Science University of Strathclyde, Glasgow Gl 1XL. Scotland tw@cs.strath.ac.uk Abstract Many search trees are impractically
Depth-bounded Discrepancy Search Toby Walsh* APES Group, Department of Computer Science University of Strathclyde, Glasgow Gl 1XL. Scotland tw@cs.strath.ac.uk Abstract Many search trees are impractically
Provably Secure Camouflaging Strategy for IC Protection
 Provably Secure Camouflaging Strategy for IC Protection Meng Li 1 Kaveh Shamsi 2 Travis Meade 2 Zheng Zhao 1 Bei Yu 3 Yier Jin 2 David Z. Pan 1 1 Electrical and Computer Engineering, University of Texas
Provably Secure Camouflaging Strategy for IC Protection Meng Li 1 Kaveh Shamsi 2 Travis Meade 2 Zheng Zhao 1 Bei Yu 3 Yier Jin 2 David Z. Pan 1 1 Electrical and Computer Engineering, University of Texas
Aryeh Rappaport Avinoam Meir. Schedule automation
 Aryeh Rappaport Avinoam Meir Schedule automation Introduction In this project we tried to automate scheduling. Which is to help a student to pick the time he takes the courses so they want collide with
Aryeh Rappaport Avinoam Meir Schedule automation Introduction In this project we tried to automate scheduling. Which is to help a student to pick the time he takes the courses so they want collide with
/435 Artificial Intelligence Fall 2015
 Final Exam 600.335/435 Artificial Intelligence Fall 2015 Name: Section (335/435): Instructions Please be sure to write both your name and section in the space above! Some questions will be exclusive to
Final Exam 600.335/435 Artificial Intelligence Fall 2015 Name: Section (335/435): Instructions Please be sure to write both your name and section in the space above! Some questions will be exclusive to
Algorithms and Data Structures
 Algorithms and Data Structures CMPSC 465 LECTURES 22-23 Binary Search Trees Adam Smith S. Raskhodnikova and A. Smith. Based on slides by C. Leiserson and E. Demaine. 1 Heaps: Review Heap-leap-jeep-creep(A):
Algorithms and Data Structures CMPSC 465 LECTURES 22-23 Binary Search Trees Adam Smith S. Raskhodnikova and A. Smith. Based on slides by C. Leiserson and E. Demaine. 1 Heaps: Review Heap-leap-jeep-creep(A):
CS Lecture 5. Vidroha debroy. Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute
 CS 3353 Lecture 5 Vidroha debroy Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute Searching for a number Find a specific number 91-3 26 54 73
CS 3353 Lecture 5 Vidroha debroy Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute Searching for a number Find a specific number 91-3 26 54 73
Decision Trees. an Introduction
 Decision Trees an Introduction Outline Top-Down Decision Tree Construction Choosing the Splitting Attribute Information Gain and Gain Ratio Decision Tree An internal node is a test on an attribute A branch
Decision Trees an Introduction Outline Top-Down Decision Tree Construction Choosing the Splitting Attribute Information Gain and Gain Ratio Decision Tree An internal node is a test on an attribute A branch
G53CLP Constraint Logic Programming
 G53CLP Constraint Logic Programming Dr Rong Qu Basic Search Strategies CP Techniques Constraint propagation* Basic search strategies Look back, look ahead Search orders B & B *So far what we ve seen is
G53CLP Constraint Logic Programming Dr Rong Qu Basic Search Strategies CP Techniques Constraint propagation* Basic search strategies Look back, look ahead Search orders B & B *So far what we ve seen is
Transposition Table, History Heuristic, and other Search Enhancements
 Transposition Table, History Heuristic, and other Search Enhancements Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract Introduce heuristics for improving the efficiency
Transposition Table, History Heuristic, and other Search Enhancements Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract Introduce heuristics for improving the efficiency
Spider Search: An Efficient and Non-Frontier-Based Real-Time Search Algorithm
 International Journal of Computer Information Systems and Industrial Management Applications (IJCISIM) ISSN: 2150-7988 Vol.2 (2010), pp.234-242 http://www.mirlabs.org/ijcisim Spider Search: An Efficient
International Journal of Computer Information Systems and Industrial Management Applications (IJCISIM) ISSN: 2150-7988 Vol.2 (2010), pp.234-242 http://www.mirlabs.org/ijcisim Spider Search: An Efficient
A new Decomposition Algorithm for Multistage Stochastic Programs with Endogenous Uncertainties
 A new Decomposition Algorithm for Multistage Stochastic Programs with Endogenous Uncertainties Vijay Gupta Ignacio E. Grossmann Department of Chemical Engineering Carnegie Mellon University, Pittsburgh
A new Decomposition Algorithm for Multistage Stochastic Programs with Endogenous Uncertainties Vijay Gupta Ignacio E. Grossmann Department of Chemical Engineering Carnegie Mellon University, Pittsburgh
Lesson 22: Average Rate of Change
 Student Outcomes Students know how to compute the average rate of change in the height of water level when water is poured into a conical container at a constant rate. MP.1 Lesson Notes This lesson focuses
Student Outcomes Students know how to compute the average rate of change in the height of water level when water is poured into a conical container at a constant rate. MP.1 Lesson Notes This lesson focuses
Computational Models: Class 6
 Computational Models: Class 6 Benny Chor School of Computer Science Tel Aviv University November 23, 2015 Based on slides by Maurice Herlihy, Brown University, and modifications by Iftach Haitner and Yishay
Computational Models: Class 6 Benny Chor School of Computer Science Tel Aviv University November 23, 2015 Based on slides by Maurice Herlihy, Brown University, and modifications by Iftach Haitner and Yishay
Advanced Search Hill climbing
 Advanced Search Hill climbing Yingyu Liang yliang@cs.wisc.edu Computer Sciences Department University of Wisconsin, Madison [Based on slides from Jerry Zhu, Andrew Moore http://www.cs.cmu.edu/~awm/tutorials
Advanced Search Hill climbing Yingyu Liang yliang@cs.wisc.edu Computer Sciences Department University of Wisconsin, Madison [Based on slides from Jerry Zhu, Andrew Moore http://www.cs.cmu.edu/~awm/tutorials
Dispatching Universität Karlsruhe, System Architecture Group
 µ-kernel Construction (6) Dispatching 1 Dispatching Topics Thread switch To a specific thread To next thread to be scheduled To nil Implicitly, when IPC blocks Priorities Preemption Time slices Wakeups,
µ-kernel Construction (6) Dispatching 1 Dispatching Topics Thread switch To a specific thread To next thread to be scheduled To nil Implicitly, when IPC blocks Priorities Preemption Time slices Wakeups,
Problem-Solving: A* and Beyond. CSCI 3202, Fall 2010
 Problem-Solving: A* and Beyond CSCI 3202, Fall 2010 Administrivia Reading for this week: 4.1.1-4.1.3 (up to p. 126) in R+N; 5.1-5.4 (pp. 161-176) Problem Set 1 will be posted by tomorrow morning; due September
Problem-Solving: A* and Beyond CSCI 3202, Fall 2010 Administrivia Reading for this week: 4.1.1-4.1.3 (up to p. 126) in R+N; 5.1-5.4 (pp. 161-176) Problem Set 1 will be posted by tomorrow morning; due September
6.034 Artificial Intelligence
 Massachusetts Institute of Technology 6.034 Artificial Intelligence Examination Solutions # 1 Problem 1 Enforcing the Rules on Wall Street (30 points) Part A (12 points) Worksheet Initial Database Joe
Massachusetts Institute of Technology 6.034 Artificial Intelligence Examination Solutions # 1 Problem 1 Enforcing the Rules on Wall Street (30 points) Part A (12 points) Worksheet Initial Database Joe
Decision Trees. Nicholas Ruozzi University of Texas at Dallas. Based on the slides of Vibhav Gogate and David Sontag
 Decision Trees Nicholas Ruozzi University of Texas at Dallas Based on the slides of Vibhav Gogate and David Sontag Announcements Course TA: Hao Xiong Office hours: Friday 2pm-4pm in ECSS2.104A1 First homework
Decision Trees Nicholas Ruozzi University of Texas at Dallas Based on the slides of Vibhav Gogate and David Sontag Announcements Course TA: Hao Xiong Office hours: Friday 2pm-4pm in ECSS2.104A1 First homework
The Evolution of Transport Planning
 The Evolution of Transport Planning On Proportionality and Uniqueness in Equilibrium Assignment Michael Florian Calin D. Morosan Background Several bush-based algorithms for computing equilibrium assignments
The Evolution of Transport Planning On Proportionality and Uniqueness in Equilibrium Assignment Michael Florian Calin D. Morosan Background Several bush-based algorithms for computing equilibrium assignments
CS472 Foundations of Artificial Intelligence. Final Exam December 19, :30pm
 CS472 Foundations of Artificial Intelligence Final Exam December 19, 2003 12-2:30pm Name: (Q exam takers should write their Number instead!!!) Instructions: You have 2.5 hours to complete this exam. The
CS472 Foundations of Artificial Intelligence Final Exam December 19, 2003 12-2:30pm Name: (Q exam takers should write their Number instead!!!) Instructions: You have 2.5 hours to complete this exam. The
Lesson 18: There Is Only One Line Passing Through a Given Point with a Given Slope
 There Is Only One Line Passing Through a Given Point with a Given Slope Classwork Opening Exercise Examine each of the graphs and their equations. Identify the coordinates of the point where the line intersects
There Is Only One Line Passing Through a Given Point with a Given Slope Classwork Opening Exercise Examine each of the graphs and their equations. Identify the coordinates of the point where the line intersects
A Proof-Producing CSP Solver 1
 A Proof-Producing CSP Solver 1 Michael Veksler Ofer Strichman Technion - Israel Institute of Technology CSP SAT June 18, 2011 1 Originally presented at AAAI 10 Introduction CSP proofs It is easy to validate
A Proof-Producing CSP Solver 1 Michael Veksler Ofer Strichman Technion - Israel Institute of Technology CSP SAT June 18, 2011 1 Originally presented at AAAI 10 Introduction CSP proofs It is easy to validate
DESIGN AND ANALYSIS OF ALGORITHMS (DAA 2017)
") DESIGN AND ANALYSIS OF ALGORITHMS (DAA 2017) Veli Mäkinen 12/05/2017 1 COURSE STRUCTURE 7 weeks: video lecture -> demo lecture -> study group -> exercise Video lecture: Overview, main concepts, algorithm
DESIGN AND ANALYSIS OF ALGORITHMS (DAA 2017) Veli Mäkinen 12/05/2017 1 COURSE STRUCTURE 7 weeks: video lecture -> demo lecture -> study group -> exercise Video lecture: Overview, main concepts, algorithm
Ocean Observatories Initiative. Coastal & Global Scale Nodes. Hydrogen Safety. OOI Surface Mooring Hydrogen Safety Review
 Ocean Observatories Initiative Coastal & Global Scale Nodes Hydrogen Safety CP01 Mooring Timeline: 21 November 2013: CP01CNSM was deployed and transitioned to shore controlled operations. 17 Feb. 2014:
Ocean Observatories Initiative Coastal & Global Scale Nodes Hydrogen Safety CP01 Mooring Timeline: 21 November 2013: CP01CNSM was deployed and transitioned to shore controlled operations. 17 Feb. 2014:
4. Please Do Break the Crystal
 4. Please Do Break the Crystal Tell the broken plate you are sorry. Mary Robertson. Programming constructs and algorithmic paradigms covered in this puzzle: Break statements, radix representations. You
4. Please Do Break the Crystal Tell the broken plate you are sorry. Mary Robertson. Programming constructs and algorithmic paradigms covered in this puzzle: Break statements, radix representations. You
Heap Sort. Lecture 35. Robb T. Koether. Hampden-Sydney College. Mon, Apr 25, 2016
 Heap Sort Lecture 35 Robb T. Koether Hampden-Sydney College Mon, Apr 25, 2016 Robb T. Koether (Hampden-Sydney College) Heap Sort Mon, Apr 25, 2016 1 / 14 1 Sorting 2 The Heap Sort Robb T. Koether (Hampden-Sydney
Heap Sort Lecture 35 Robb T. Koether Hampden-Sydney College Mon, Apr 25, 2016 Robb T. Koether (Hampden-Sydney College) Heap Sort Mon, Apr 25, 2016 1 / 14 1 Sorting 2 The Heap Sort Robb T. Koether (Hampden-Sydney
Building an NFL performance metric
 Building an NFL performance metric Seonghyun Paik (spaik1@stanford.edu) December 16, 2016 I. Introduction In current pro sports, many statistical methods are applied to evaluate player s performance and
Building an NFL performance metric Seonghyun Paik (spaik1@stanford.edu) December 16, 2016 I. Introduction In current pro sports, many statistical methods are applied to evaluate player s performance and
Critical Systems Validation
 Critical Systems Validation Objectives To explain how system reliability can be measured and how reliability growth models can be used for reliability prediction To describe safety arguments and how these
Critical Systems Validation Objectives To explain how system reliability can be measured and how reliability growth models can be used for reliability prediction To describe safety arguments and how these
A SEMI-PRESSURE-DRIVEN APPROACH TO RELIABILITY ASSESSMENT OF WATER DISTRIBUTION NETWORKS
 A SEMI-PRESSURE-DRIVEN APPROACH TO RELIABILITY ASSESSMENT OF WATER DISTRIBUTION NETWORKS S. S. OZGER PhD Student, Dept. of Civil and Envir. Engrg., Arizona State Univ., 85287, Tempe, AZ, US Phone: +1-480-965-3589
A SEMI-PRESSURE-DRIVEN APPROACH TO RELIABILITY ASSESSMENT OF WATER DISTRIBUTION NETWORKS S. S. OZGER PhD Student, Dept. of Civil and Envir. Engrg., Arizona State Univ., 85287, Tempe, AZ, US Phone: +1-480-965-3589
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Differential Kinematics, Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
CS 4649/7649 Robot Intelligence: Planning Differential Kinematics, Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
SURFACE CASING SELECTION FOR COLLAPSE, BURST AND AXIAL DESIGN FACTOR LOADS EXERCISE
 SURFACE CASING SELECTION FOR COLLAPSE, BURST AND AXIAL DESIGN FACTOR LOADS EXERCISE Instructions Use the example well data from this document or the powerpoint notes handout to complete the following graphs.
SURFACE CASING SELECTION FOR COLLAPSE, BURST AND AXIAL DESIGN FACTOR LOADS EXERCISE Instructions Use the example well data from this document or the powerpoint notes handout to complete the following graphs.
Ammonia Synthesis with Aspen Plus V8.0
 Ammonia Synthesis with Aspen Plus V8.0 Part 2 Closed Loop Simulation of Ammonia Synthesis 1. Lesson Objectives Review Aspen Plus convergence methods Build upon the open loop Ammonia Synthesis process simulation
Ammonia Synthesis with Aspen Plus V8.0 Part 2 Closed Loop Simulation of Ammonia Synthesis 1. Lesson Objectives Review Aspen Plus convergence methods Build upon the open loop Ammonia Synthesis process simulation
Chapter 4 (sort of): How Universal Are Turing Machines? CS105: Great Insights in Computer Science
: How Universal Are Turing Machines? CS105: Great Insights in Computer Science") Chapter 4 (sort of): How Universal Are Turing Machines? CS105: Great Insights in Computer Science Some Probability Theory If event has probability p, 1/p tries before it happens (on average). If n distinct
Chapter 4 (sort of): How Universal Are Turing Machines? CS105: Great Insights in Computer Science Some Probability Theory If event has probability p, 1/p tries before it happens (on average). If n distinct
Robust Task Execution: Procedural and Model-based. Outline. Desiderata: Robust Task-level Execution
 Robust Task Execution: Procedural and Model-based Mission Goals and Environment Constraints Temporal Planner Temporal Network Solver Projective Task Expansion Initial Conditions Temporal Plan Dynamic Scheduling
Robust Task Execution: Procedural and Model-based Mission Goals and Environment Constraints Temporal Planner Temporal Network Solver Projective Task Expansion Initial Conditions Temporal Plan Dynamic Scheduling
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Roadmap Approaches Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1 *Slides
CS 4649/7649 Robot Intelligence: Planning Roadmap Approaches Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1 *Slides
Avoiding Short Term Overheat Failures of Recovery Boiler Superheater Tubes
 Avoiding Short Term Overheat Failures of Recovery Boiler Superheater Tubes Dr. Andrew K. Jones International Paper Tim Carlier Integrated Test and Measurement 2017 International Chemical Recovery Conference
Avoiding Short Term Overheat Failures of Recovery Boiler Superheater Tubes Dr. Andrew K. Jones International Paper Tim Carlier Integrated Test and Measurement 2017 International Chemical Recovery Conference
Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions
 Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions CONTENTS (MODULE 3) Introduction...1 Purpose...1 Goals and Learning Outcomes...1 Organization
Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions CONTENTS (MODULE 3) Introduction...1 Purpose...1 Goals and Learning Outcomes...1 Organization
Draw Shot Primer Part II: aiming
 David lciatore ( Dr. Dave ) Draw Shot Primer Part II: aiming ILLUSTRTED PRINCIPLES Note: Supporting narrated video (NV) demonstrations, high-speed video (HSV) clips, and technical proofs (TP) can be accessed
David lciatore ( Dr. Dave ) Draw Shot Primer Part II: aiming ILLUSTRTED PRINCIPLES Note: Supporting narrated video (NV) demonstrations, high-speed video (HSV) clips, and technical proofs (TP) can be accessed
Evacuation Time Minimization Model using Traffic Simulation and GIS Technology
 Evacuation Time Minimization Model using Traffic Simulation and GIS Technology Daisik Danny Nam, Presenter Ph.D. Student Department of Civil and Environmental Engineering, University of California, Irvine
Evacuation Time Minimization Model using Traffic Simulation and GIS Technology Daisik Danny Nam, Presenter Ph.D. Student Department of Civil and Environmental Engineering, University of California, Irvine
IAEA Training in Level 2 PSA MODULE 8: Coupling Source Terms to Probabilistic Event Analysis (CET end-state binning)
") IAEA Training in Level 2 PSA MODULE 8: Coupling Source Terms to Probabilistic Event Analysis (CET end-state binning) The Problem A probabilistic treatment of severe accident progression leads to numerous
IAEA Training in Level 2 PSA MODULE 8: Coupling Source Terms to Probabilistic Event Analysis (CET end-state binning) The Problem A probabilistic treatment of severe accident progression leads to numerous
CSC242: Intro to AI. Lecture 21
 CSC242: Intro to AI Lecture 21 Quiz Stop Time: 2:15 Learning (from Examples) Learning Learning gives computers the ability to learn without being explicitly programmed (Samuel, 1959)... agents that can
CSC242: Intro to AI Lecture 21 Quiz Stop Time: 2:15 Learning (from Examples) Learning Learning gives computers the ability to learn without being explicitly programmed (Samuel, 1959)... agents that can
Automating Injection Molding Simulation using Autonomous Optimization
 Automating Injection Molding Simulation using Autonomous Optimization Matt Proske, Rodrigo Gutierrez, & Gabriel Geyne SIGMASOFT Virtual Molding Autonomous optimization is coupled to injection molding simulation
Automating Injection Molding Simulation using Autonomous Optimization Matt Proske, Rodrigo Gutierrez, & Gabriel Geyne SIGMASOFT Virtual Molding Autonomous optimization is coupled to injection molding simulation
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
CMPUT680 - Winter 2001
 CMPUT680 - Winter 2001 Topic 6: Register Allocation and Instruction Scheduling José Nelson Amaral http://www.cs.ualberta.ca/~amaral/courses/680 CMPUT 680 - Compiler Design and Optimization 1 Reading List
CMPUT680 - Winter 2001 Topic 6: Register Allocation and Instruction Scheduling José Nelson Amaral http://www.cs.ualberta.ca/~amaral/courses/680 CMPUT 680 - Compiler Design and Optimization 1 Reading List
United States Freestyle Ski Team World Cup and Team Qualification Criteria
 FIS Freestyle World Cup Criteria 2016-17 The FIS Freestyle World Cup represents the highest caliber of competition in freestyle skiing; including more than 20 countries. The World Cup calendar begins in
FIS Freestyle World Cup Criteria 2016-17 The FIS Freestyle World Cup represents the highest caliber of competition in freestyle skiing; including more than 20 countries. The World Cup calendar begins in
Introduction to Algorithms
 Introduction to Algorithms 6.46J/.4J LECTURE 7 Shortest Paths I Properties o shortest paths Dijkstra s Correctness Analysis Breadth-irst Paths in graphs Consider a digraph G = (V, E) with edge-weight unction
Introduction to Algorithms 6.46J/.4J LECTURE 7 Shortest Paths I Properties o shortest paths Dijkstra s Correctness Analysis Breadth-irst Paths in graphs Consider a digraph G = (V, E) with edge-weight unction
Inquiry Investigation: Factors Affecting Photosynthesis
 Inquiry Investigation: Factors Affecting Photosynthesis Background Photosynthesis fuels ecosystems and replenishes the Earth's atmosphere with oxygen. Like all enzyme-driven reactions, the rate of photosynthesis
Inquiry Investigation: Factors Affecting Photosynthesis Background Photosynthesis fuels ecosystems and replenishes the Earth's atmosphere with oxygen. Like all enzyme-driven reactions, the rate of photosynthesis
Lossless Comparison of Nested Software Decompositions
 Lossless Comparison of Nested Software Decompositions Mark Shtern and Vassilios Tzerpos York University Toronto, Ontario, Canada {mark,bil}@cse.yorku.ca Abstract Reverse engineering legacy software systems
Lossless Comparison of Nested Software Decompositions Mark Shtern and Vassilios Tzerpos York University Toronto, Ontario, Canada {mark,bil}@cse.yorku.ca Abstract Reverse engineering legacy software systems
Analysis of Professional Cycling Results as a Predictor for Future Success
 Analysis of Professional Cycling Results as a Predictor for Future Success Alex Bertrand Introduction As a competitive sport, road cycling lies in a category nearly all its own. Putting aside the sheer
Analysis of Professional Cycling Results as a Predictor for Future Success Alex Bertrand Introduction As a competitive sport, road cycling lies in a category nearly all its own. Putting aside the sheer
CENTER PIVOT EVALUATION AND DESIGN
 CENTER PIVOT EVALUATION AND DESIGN Dale F. Heermann Agricultural Engineer USDA-ARS 2150 Centre Avenue, Building D, Suite 320 Fort Collins, CO 80526 Voice -970-492-7410 Fax - 970-492-7408 Email - dale.heermann@ars.usda.gov
CENTER PIVOT EVALUATION AND DESIGN Dale F. Heermann Agricultural Engineer USDA-ARS 2150 Centre Avenue, Building D, Suite 320 Fort Collins, CO 80526 Voice -970-492-7410 Fax - 970-492-7408 Email - dale.heermann@ars.usda.gov
GMS 10.0 Tutorial SEAWAT Viscosity and Pressure Effects Examine the Effects of Pressure on Fluid Density with SEAWAT
 v. 10.0 GMS 10.0 Tutorial SEAWAT Viscosity and Pressure Effects Examine the Effects of Pressure on Fluid Density with SEAWAT Objectives Learn how to simulate the effects of viscosity and how pressure impacts
v. 10.0 GMS 10.0 Tutorial SEAWAT Viscosity and Pressure Effects Examine the Effects of Pressure on Fluid Density with SEAWAT Objectives Learn how to simulate the effects of viscosity and how pressure impacts
CS145: INTRODUCTION TO DATA MINING
 CS145: INTRODUCTION TO DATA MINING 3: Vector Data: Logistic Regression Instructor: Yizhou Sun yzsun@cs.ucla.edu October 9, 2017 Methods to Learn Vector Data Set Data Sequence Data Text Data Classification
CS145: INTRODUCTION TO DATA MINING 3: Vector Data: Logistic Regression Instructor: Yizhou Sun yzsun@cs.ucla.edu October 9, 2017 Methods to Learn Vector Data Set Data Sequence Data Text Data Classification
Neo4j Exercise 2. Spatial Procedures
 GGE5402/6405: Geographic Databases Fall 2016 Neo4j Exercise 2 CREATE A GRAPH DB FOR CANADIAN CITIES Emmanuel Stefanakis estef@unb.ca Spatial Procedures CALL spatial.procedures 1 CALL spatial.procedures
GGE5402/6405: Geographic Databases Fall 2016 Neo4j Exercise 2 CREATE A GRAPH DB FOR CANADIAN CITIES Emmanuel Stefanakis estef@unb.ca Spatial Procedures CALL spatial.procedures 1 CALL spatial.procedures
Algebra Date Lesson Independent Work Computer Tuesday, Introduction (whole class) Problem with Dice
 Problem with Dice") Tuesday, Introduction (whole class) Problem with Dice Critical Thinking Puzzles 3 Station expectations Count the Squares Math Riddles Wednesday, Computer expectations (whole class) Tangrams Read permission
Tuesday, Introduction (whole class) Problem with Dice Critical Thinking Puzzles 3 Station expectations Count the Squares Math Riddles Wednesday, Computer expectations (whole class) Tangrams Read permission
Improving WCET Analysis for Synthesized Code from Matlab/Simulink/Stateflow. Lili Tan Compiler Design Lab Saarland University
 Improving WCET Analysis for Synthesized Code from Matlab/Simulink/Stateflow Lili Tan Compiler Design Lab Saarland University Safety-Criticial Embedded Software WCET bound required for Scheduling >=0 Execution
Improving WCET Analysis for Synthesized Code from Matlab/Simulink/Stateflow Lili Tan Compiler Design Lab Saarland University Safety-Criticial Embedded Software WCET bound required for Scheduling >=0 Execution
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Partially Observable MDP Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
CS 4649/7649 Robot Intelligence: Planning Partially Observable MDP Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
Planning and Acting in Partially Observable Stochastic Domains
 Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Bulgarian Olympiad in Informatics: Excellence over a Long Period of Time
 Olympiads in Informatics, 2017, Vol. 11, 151 158 2017 IOI, Vilnius University DOI: 10.15388/ioi.2017.12 151 Bulgarian Olympiad in Informatics: Excellence over a Long Period of Time Emil KELEVEDJIEV 1,
Olympiads in Informatics, 2017, Vol. 11, 151 158 2017 IOI, Vilnius University DOI: 10.15388/ioi.2017.12 151 Bulgarian Olympiad in Informatics: Excellence over a Long Period of Time Emil KELEVEDJIEV 1,
CMSC131. Introduction to Computational Thinking. (with links to some external Scratch exercises) How do you accomplish a task?
 How do you accomplish a task?") CMSC131 Introduction to Computational Thinking (with links to some external Scratch exercises) How do you accomplish a task? When faced with a task, we often need to undertake several steps to accomplish
CMSC131 Introduction to Computational Thinking (with links to some external Scratch exercises) How do you accomplish a task? When faced with a task, we often need to undertake several steps to accomplish
DECISION-MAKING ON IMPLEMENTATION OF IPO UNDER TOPOLOGICAL UNCERTAINTY
 ACTA UNIVERSITATIS AGRICULTURAE ET SILVICULTURAE MENDELIANAE BRUNENSIS Volume 63 25 Number 1, 2015 http://dx.doi.org/10.11118/actaun201563010193 DECISION-MAKING ON IMPLEMENTATION OF IPO UNDER TOPOLOGICAL
ACTA UNIVERSITATIS AGRICULTURAE ET SILVICULTURAE MENDELIANAE BRUNENSIS Volume 63 25 Number 1, 2015 http://dx.doi.org/10.11118/actaun201563010193 DECISION-MAKING ON IMPLEMENTATION OF IPO UNDER TOPOLOGICAL
Phase Changes * OpenStax
 OpenStax-CNX module: m42218 1 Phase Changes * OpenStax This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 3.0 Abstract Interpret a phase diagram. State Dalton's
OpenStax-CNX module: m42218 1 Phase Changes * OpenStax This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 3.0 Abstract Interpret a phase diagram. State Dalton's
Results and conclusions of a floating Lidar offshore test
 Results and conclusions of a floating Lidar offshore test J. Gottschall, G. Wolken-Möhlmann, Th. Viergutz, B. Lange [Fraunhofer IWES Wind Lidar Buoy next to FINO1 met. mast] EERA DeepWind'2014 Conference,
Results and conclusions of a floating Lidar offshore test J. Gottschall, G. Wolken-Möhlmann, Th. Viergutz, B. Lange [Fraunhofer IWES Wind Lidar Buoy next to FINO1 met. mast] EERA DeepWind'2014 Conference,
Optimization and Search. Jim Tørresen Optimization and Search
 Optimization and Search INF3490 - Biologically inspired computing Lecture 1: Marsland chapter 9.1, 9.4-9.6 2017 Optimization and Search Jim Tørresen 2 Optimization and Search Methods (selection) Optimization
Optimization and Search INF3490 - Biologically inspired computing Lecture 1: Marsland chapter 9.1, 9.4-9.6 2017 Optimization and Search Jim Tørresen 2 Optimization and Search Methods (selection) Optimization
CT PET-2018 Part - B Phd COMPUTER APPLICATION Sample Question Paper
 CT PET-2018 Part - B Phd COMPUTER APPLICATION Sample Question Paper Note: All Questions are compulsory. Each question carry one mark. 1. Error detection at the data link layer is achieved by? [A] Bit stuffing
CT PET-2018 Part - B Phd COMPUTER APPLICATION Sample Question Paper Note: All Questions are compulsory. Each question carry one mark. 1. Error detection at the data link layer is achieved by? [A] Bit stuffing
Addition and Subtraction of Rational Expressions
 RT.3 Addition and Subtraction of Rational Expressions Many real-world applications involve adding or subtracting algebraic fractions. Similarly as in the case of common fractions, to add or subtract algebraic
RT.3 Addition and Subtraction of Rational Expressions Many real-world applications involve adding or subtracting algebraic fractions. Similarly as in the case of common fractions, to add or subtract algebraic
Battle of the Waves Sound vs Light
 Battle of the Waves Sound vs Light By: Vaneesha Persad, Katelyn Johnson, and Heather Miller Focus on Inquiry The student will collect, analyze, and interpret data to develop an understanding of how the
Battle of the Waves Sound vs Light By: Vaneesha Persad, Katelyn Johnson, and Heather Miller Focus on Inquiry The student will collect, analyze, and interpret data to develop an understanding of how the
CS 221 PROJECT FINAL
 CS 221 PROJECT FINAL STUART SY AND YUSHI HOMMA 1. INTRODUCTION OF TASK ESPN fantasy baseball is a common pastime for many Americans, which, coincidentally, defines a problem whose solution could potentially
CS 221 PROJECT FINAL STUART SY AND YUSHI HOMMA 1. INTRODUCTION OF TASK ESPN fantasy baseball is a common pastime for many Americans, which, coincidentally, defines a problem whose solution could potentially
Efficient Minimization of Routing Cost in Delay Tolerant Networks
 Computer Science Department Christos Tsiaras tsiaras@aueb.gr Master Thesis Presentation (short edition) Efficient Minimization of Routing Cost in Delay Tolerant Networks Supervised by Dr. Stavros Toumpis
Computer Science Department Christos Tsiaras tsiaras@aueb.gr Master Thesis Presentation (short edition) Efficient Minimization of Routing Cost in Delay Tolerant Networks Supervised by Dr. Stavros Toumpis
Lab 4: Root Locus Based Control Design
 Lab 4: Root Locus Based Control Design References: Franklin, Powell and Emami-Naeini. Feedback Control of Dynamic Systems, 3 rd ed. Addison-Wesley, Massachusetts: 1994. Ogata, Katsuhiko. Modern Control
Lab 4: Root Locus Based Control Design References: Franklin, Powell and Emami-Naeini. Feedback Control of Dynamic Systems, 3 rd ed. Addison-Wesley, Massachusetts: 1994. Ogata, Katsuhiko. Modern Control
A IMPROVED VOGEL S APPROXIMATIO METHOD FOR THE TRA SPORTATIO PROBLEM. Serdar Korukoğlu 1 and Serkan Ballı 2.
 Mathematical and Computational Applications, Vol. 16, No. 2, pp. 370-381, 2011. Association for Scientific Research A IMPROVED VOGEL S APPROXIMATIO METHOD FOR THE TRA SPORTATIO PROBLEM Serdar Korukoğlu
Mathematical and Computational Applications, Vol. 16, No. 2, pp. 370-381, 2011. Association for Scientific Research A IMPROVED VOGEL S APPROXIMATIO METHOD FOR THE TRA SPORTATIO PROBLEM Serdar Korukoğlu
Iteration: while, for, do while, Reading Input with Sentinels and User-defined Functions
 Iteration: while, for, do while, Reading Input with Sentinels and User-defined Functions This programming assignment uses many of the ideas presented in sections 6 and 7 of the course notes. You are advised
Iteration: while, for, do while, Reading Input with Sentinels and User-defined Functions This programming assignment uses many of the ideas presented in sections 6 and 7 of the course notes. You are advised
Agilent Dimension Software for ELSD User Manual
 Agilent Dimension Software for ELSD User Manual Agilent Dimension Software for ELSD User Manual Agilent Technologies Notices Agilent Technologies, Inc. 2011 No part of this manual may be reproduced in
Agilent Dimension Software for ELSD User Manual Agilent Dimension Software for ELSD User Manual Agilent Technologies Notices Agilent Technologies, Inc. 2011 No part of this manual may be reproduced in