INSIDE 16. Hydrographic Soundings, Sensors, and Bots. Dual-head Sonar Mapping. 25 A Case for Big Blue Data. Collaboration in the Air & on the Ground
|
|
|
- Claude Houston
- 5 years ago
- Views:
Transcription













1 POSITIONING AND MEASUREMENT, ELEVATED AUGUST 2016 INSIDE: SURVEYING HYDROGRAPHY EDUCATION MAPPING UAS MACHINE CONTROL Hydrographic Soundings, Sensors, and Bots INSIDE A Case for Big Blue Data 31 Dual-head Sonar Mapping Collaboration in the Air & on the Ground

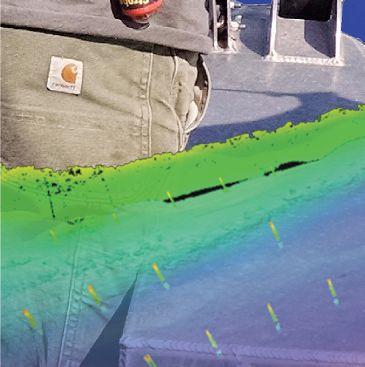
2 Dual-head Mapping A dual-mount multibeam sonar installation is used to conduct extreme shallow-water surveys of intertidal seafloor to track morphologic change. 16 xyht AUGUST 2016

3 By George Kaminsky, Brent von Twistern, Mike Brissette, Jonathan Beaudoin, Heather Weiner, and Amanda Hacking The intertidal and nearshore zone is among the most ecologically productive and important zones to coastal resource management agencies. However, collecting high-resolution bathymetry in this zone is made difficult by technological inefficiencies and navigational hazards. Furthermore, the coastal zone is influenced by both terrestrial and marine processes that drive a wide range of changes in morphology and substrate that govern nearshore habitat. Thus, there is need for not only accurately mapping the shallow seafloor but also for monitoring its change over time and space. This article describes the outfitting of a shallow-draft vessel with a dual-head, dualmount (DHDM) multibeam sonar system for surveying in extremely shallow water. Dual-head multibeam sonar installations and surveys are relatively rare in hydrographic surveying. Due to the necessity for a tight integration with an Inertial Measurement Unit (IMU; aka Inertial Navigation System) and refraction issues relating to water column sound velocity, dual-head systems are typically mounted side by side on a single strut mount or pole using a bracket that holds both heads. Until this installation on the Washington State Department of Ecology s research vessel George Davidson, the installation of an integrated DHDM multibeam system had not been attempted. THE MISSION The Washington State Department of Ecology set out to develop a platform for collecting seamless highresolution topobathymetric coverage along the State s shorelines. These coastal data are particularly needed along the shores of Puget Sound, with over 4,000 km of shoreline, where the nearshore ecology is largely governed by the terrestrial input of sediment from eroding bluffs that form Above: Image produced by CMAP s DHDM solution (dual R2Sonic 2022, dual Universal Sonar Mount, Applanix 320 POS-MV V5 RTK, and QPS software QINSy and Fledermaus). Background: The Washington State Department of Ecology Coastal Monitoring & Analysis Program crew conducts a DHDM multibeam survey aboard the R/V George Davidson; the sonars are deployed from the port and starboard aft quarters of the vessel.

4 George Kaminsky collects a sound velocity cast. the beaches and nearshore substrate. With the area of interest extending from the top of coastal bluffs to the lower extent of the photic zone in water depths of 10-20m, the Department of Ecology Coastal Monitoring & Analysis Program (CMAP) purchased and outfitted a twin-hull shallowdraft beach landing craft for mapping and monitoring the coastal zone. Scientific and management objectives require the highest accuracy and resolution possible in order to detect and quantify changes in morphology and sediment composition and to infer patterns in sediment transport. Ecology s 28 vessel, the R/V George Davidson, was custom-built for coastal zone surveying, including the installation of an Optech Ilris HD-ER laser scanner with motion compensation and an Applanix Position and Orientation System for Marine Vessels (320 POS-MV V5 RTK) IMU-36 on a cabin-top mount to enable mobile laser scanning of bluffs and beaches. Initially, the vessel was outfitted with a single-head R2Sonic 2022 multibeam sonar deployed through a moon pool along the centerline of the vessel. To increase swath width and improve efficiency of mapping in extremely shallow water, the moon pool mount was replaced with a DHDM R2Sonic 2022 multibeam sonar system with the installation of two side mounts and sonar heads. CHALLENGES WITH LEGACY SOLUTIONS With a single-head multibeam system and a 120 swath angle for optimal resolution data with minimal refraction effects, the bottom coverage is limited to four times the water depth. In 1 m of water, this means the swath width is only 4-m wide. In the case of the R/V George Davidson, using the moon pool mount in the center of the vessel with a 10-ft beam, a survey with 1 m of water under the sonar head obtains a swath width that extends only 1.5 ft to each side of the vessel. In order to obtain the highest resolution data, the bottom is pinged twice (initial pass, plus return pass in the opposite direction) such that the outer pings from one pass blend with the nadir pings on the next. The narrow swath width creates an especially challenging situation for obtaining bottom coverage with 100% overlap. Such a survey requires running tracklines that are little more than a half boat-width apart. And given the need for slow navigation in shallow water and time constraints due to changing tides, the amount of bottom coverage that can be obtained each day in the intertidal zone is severely restricted. Even more important, however, is that with the inherently variable depths and configurations in nearshore morphology, the swath width can vary over every ridge and trough of a sandwave or bedform, making it exceedingly difficult to consistently obtain either the required overlap or to avoid holidays (data gaps) in bottom coverage. SOLUTION DEVELOPED A cooperative effort among the Washington State Department of Ecology, Universal Sonar Mount Inc., R2Sonic LLC, and Quality Positioning Services BV (QPS, a hydrographic and marine software solutions company) provided a solution to maximize seafloor coverage and survey efficiency in very shallow water up to 1 m below the sonar heads at high tide. The solution involved two independent, yet integrated, installations (port and starboard) of the sonar heads. 18 xyht AUGUST 2016
 because a single IMU was")
 of the sonar during normal daily vessel maneuvering, including trailering and safe")
5 Amanda Hacking operates the R/V George Davidson during a multibeam survey. Special considerations had to be taken to ensure extremely tight and rigid installation and performance of the sonar mounts (to minimize dynamic vibrations and harmonics) because a single IMU was being used. The solution also needed to provide for repeatable deployments (maintenance of precision positioning and alignments) of the sonar during normal daily vessel maneuvering, including trailering and safe stowage of the vessel. The installation of the sonar mounts took extensive planning, design, and analysis (as well as expert vessel fabricators) to ensure success. Factors included: limited vessel space; physical layout of the sonar mounts (deployed and stowed positions); internal vessel-frame structural support for the dynamic loads, both lateral and vertical; non-structural design for wiring and cable routing; minimizing physical and acoustic interference; optimizing the depth of the sonar heads relative to vessel keel; rigid mounting to ensure quality survey data while operating in waves, currents, and survey speeds of up to 8 kts; and secure stowage of the mounts and sonar within the footprint of the vessel during trailering on roads. It was essential that the sonar mounts provide a robust and extremely rigid mounting solution that is integrated with the vessel and has no independent vibration. In addition, given the navigation hazards inherent to extremely shallow water, it was critical to have an integrated and calibrated breakaway feature of the sonar heads in the event of collision or snag to significantly reduce The port side mount with a Simple MEMs sensor attached to the sonar bracket during initial testing. AUGUST 2016 xyht 19


6 Above: CMAP crew collects intertidal beach elevation data using RTK-GPS equipment along the Elwha bluffs to ground-truth and fill in any gaps between boat-based topographic lidar and multibeam sonar data. Right: The R/V George Davidson collects multibeam data along the Elwha bluffs, while operating close to shore; the survey team works to obtain overlap of the multibeam coverage at high tide with lidar collected at low tide. impact and protect the sonars from physical damage. Moreover, the breakaway design needed to provide for quick, repeatable, and precise resetting and recovery to resume survey operations with minimal downtime. A thorough assessment of structural support requirements for the side mounts was needed to ensure that the mount platforms would be sufficiently tied to the vessel s framing and would perform with minimal flex and within the tight tolerance essential for highresolution sonar data. The boat manufacturer, the William E. Munson Company (Munson Boats), evaluated vessel- and sonar-mount loads with support from Universal Sonar Mount and implemented initial vessel modifications. David C. Weed provided independent technical assistance for analyzing internal structural support and hands-on oversight of final vessel modifications, fabrication, and installation performed by All American Marine Inc. Each of the side mounts was installed on a reinforced gunwale integrated with aft-section rigging lockers, with a 1.5 -thick top plate across the entire top side of the locker. To ensure rigidity and associated sonar performance, the top plate under the sonar mount was further reinforced with vertical members to tie into the transverse and longitudinal substructure framework of the vessel. Following installation of all the gear, the sonar mounts were set and tested for repeatable 20 xyht AUGUST 2016






7 The DHDM setup conservatively provides seafloor coverage of 6.5 to 8 times the water depth. alignments, including many deployments of the sonar from their stowed position. Universal Sonar Mount assisted with the final configuration and adjustment of the mounts, development of procedures for stowed and deployed positions, and on-water dynamic load testing with SimpleMEMS sensors in custom under-water housings for recording movement (via signal processing using the Hilbert-Huang transform, HHT) among the different parts of the mounts, the IMU, and the vessel. The vessel was then surveyed and calibrated with precise positional offsets of the sonar relative to the IMU. Field tests showed consistent agreement in seafloor depths and positioning of target features. The R2Sonic 2022 multibeam sonar collects 256 beams with a 1x1 beamwidth at 400 khz. The beam forming and bottom detection computations are performed internally within the sonar heads. These are integrated with one sonar interface module (SIM), which is the master that ingests all serial data (e.g., PPS, ZDA, TSS1 and SV) from both heads; the slave SIM only provides power to the second sonar head and communicates with the master via an Ethernet cable. The sonar heads can be operated with either simultaneous or alternating pings. In very shallow water, alternating pings using the same frequency are preferred as the seafloor is easily ensonified to saturation levels. Using simultaneous pinging, the frequency separation depends on the physical relationship between the two heads. In the case of the dual mount separated by the beam width of the vessel, less frequency separation is required than for heads located on a single mount. QPS QINSy navigation and data acquisition software is used to integrate data streams from the Applanix 320 POSMV 320 V5 RTK position and orientation system and the HYPACK FOR UNMANNED SYSTEMS Unmanned Surface Vessels (USV) Complete end-to-end solution. Mission Planning > Data Collection & Processing > Product Creation Unmanned Underwater Vehicles (UUV) Vehicle Tracking & Data Processing - sales@hypack.com AUGUST 2016 xyht 21


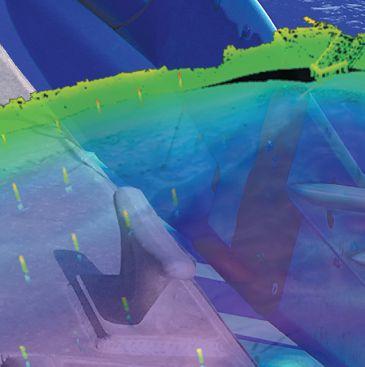
8 R2Sonic 2022 sonars. In real time, the QPS swath display shows both raw uncorrected data as well as fully corrected data for motion, refraction, and height independently for both the port and starboard heads, while the sounding grid displays the integrated soundings from both heads along with quality assurance measures such as 95% confidence level and hit count. For quality assurance, the combined swath solution from dual sonar heads is ground truthed with data from overlapping RTK-GPS topographic surveys as well as topographic boat-based mobile lidar surveys, using the Optech HD-ER laser scanner, to ensure integration and agreement between the different systems and data. DATA CAPTURE The Washington State Department of Ecology is actively collecting nearshore bathymetry data using the DHDM system on several projects, some of which involve repeat surveys for detection and quantification of morphologic change. Multibeam sonar surveys are performed up to the shoreline to the fullest extent feasible as dictated by tide, wind, waves, and other navigation conditions and hazards. Most projects aim for overlapping coverage with multibeam surveys of the intertidal beach performed at high tide, complemented with mobile laser scanning of beach and bluff or dune topography performed at low tide to obtain seamless coverage across the land/sea interface. Where conditions do not allow for contiguous overlapping coverage, a bridge between topography and bathymetry is made with ground-based RTK-GPS surveys across the intertidal zone performed to wading depth at low tide. Data products typically include m gridded bathymetry and topography, as well as difference surfaces between datasets where repeat surveys have been performed to analyze coastal change. CONCLUSIONS The success of this DHDM multibeam system is the result of careful planning, analysis, and design; expert fabrication and installation of precision gear; and system integration and calibration. The DHDM design has greatly increased efficiency and practicability of collecting extremely shallow multibeam data. Compared to the original single head mounted on the centerline of the vessel, the dual heads, each mounted approximately 2 ft to the side of the vessel, have substantially increased swath width such that a holiday is rarely created during a survey. The DHDM setup conservatively provides seafloor coverage of 6.5 to 8 times the water depth. Alternate pinging at 30 Hz in shallow water provides dense and high-resolution ensonification of the seafloor. Above (top): Oblique aerial view of the Port Gamble Bay Mill Site, targeted for environmental cleanup with removal of shoreline and in-water structures, pilings, and submerged debris. (Bottom): CMAP s combined boat-based lidar and multibeam survey of the same area. Left: Kaminsky deploys the port side multibeam sonar. Along the shoreline, the beams are electronically tilted toward the shoreline to optimize coverage into shallow water, yet no loss of coverage on the opposite side is experienced. A significant improvement is obtained with coverage while tilting the beams from a side-mounted sonar compared to a center-mounted sonar because the grazing angle is not as severe. The additional seafloor coverage off to the side of the vessel also provides for safer navigation through detection of obstructions and critically shallow water depth farther from the vessel. Thus far all obstructions on the seafloor have been avoided, but the breakaway feature of the sonar mounts was tested and functioned perfectly when the sonar mounts became entangled in crab pot lines. Repeatability of the system has been shown to be outstanding. AUGUST 2016 xyht 23
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping
 Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Release Performance Notes TN WBMS _R _Release_Presentation.pptx 22 September, 2014
 TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Multibeam and Laser: Combined High Resolution. Hydrographic Surveying for Civil Engineering Project Support
 Multibeam and Laser: Combined High Resolution Hydrographic Surveying for Civil Engineering Project Support John Dillon-Leetch,Port of London Authority Duncan Mallace, NetSurvey, UK Overview Introduction
Multibeam and Laser: Combined High Resolution Hydrographic Surveying for Civil Engineering Project Support John Dillon-Leetch,Port of London Authority Duncan Mallace, NetSurvey, UK Overview Introduction
NEED FOR SUPPLEMENTAL BATHYMETRIC SURVEY DATA COLLECTION
 305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY
 THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
Bathyswath Technical Information
 www.bathyswath.com support@bathyswath.com Reference OD-5001 Classification Unclassified Version 7.04 Date July 2013 Copy number N/A (if applicable) Bathyswath Technical Information The information contained
www.bathyswath.com support@bathyswath.com Reference OD-5001 Classification Unclassified Version 7.04 Date July 2013 Copy number N/A (if applicable) Bathyswath Technical Information The information contained
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
An Integrated Marine Gradiometer Array System (MGA)
") An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Challenges in determining water surface in airborne LiDAR topobathymetry. Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014
 Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Recommended operating guidelines (ROG) for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:
 for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:") Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
R/V Kilo Moana EM122 Multibeam Echosounder Review KM August 9-13, 2015
 R/V Kilo Moana EM122 Multibeam Echosounder Review KM1514 - August 9-13, 2015 Report prepared by: Paul Johnson and Kevin Jerram University of New Hampshire Center for Coastal and Ocean Mapping/Joint Hydrographic
R/V Kilo Moana EM122 Multibeam Echosounder Review KM1514 - August 9-13, 2015 Report prepared by: Paul Johnson and Kevin Jerram University of New Hampshire Center for Coastal and Ocean Mapping/Joint Hydrographic
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
Pathways Interns: Annika O Dea, Ian Conery, Andrea Albright
 1 REMOTE SENSING OF COASTAL MORPHODYNAMICS 237 237 237 217 217 217 2 2 2 8 119 27 252 174.59 255 255 255 163 163 163 131 132 122 239 65 53 11 135 12 112 92 56 62 12 13 12 56 48 13 12 111 Kate Brodie Brittany
1 REMOTE SENSING OF COASTAL MORPHODYNAMICS 237 237 237 217 217 217 2 2 2 8 119 27 252 174.59 255 255 255 163 163 163 131 132 122 239 65 53 11 135 12 112 92 56 62 12 13 12 56 48 13 12 111 Kate Brodie Brittany
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS)
") Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006)
") ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
NEW BUILD - Wildcat 40 Hydrographic Listing ID:
 Australia - Chile - Indonesia - Great Britain - New Zealand - Panama - Philippines - South Korea - Thailand - USA E: sales@seaboats.net (sales) - E: admin@seaboats.net (accounts) NEW BUILD - Wildcat 40
Australia - Chile - Indonesia - Great Britain - New Zealand - Panama - Philippines - South Korea - Thailand - USA E: sales@seaboats.net (sales) - E: admin@seaboats.net (accounts) NEW BUILD - Wildcat 40
SeaBat T50-R Product Description
 Ultra-High Resolution Multibeam Echosounder March 2017 PD17419-3 Table of Contents SYSTEM OVERVIEW... 5 Introduction... 5 Typical Applications... 5 Warranty... 5 SYSTEM ARCHITECTURE... 6 SeaBat T50-R...
Ultra-High Resolution Multibeam Echosounder March 2017 PD17419-3 Table of Contents SYSTEM OVERVIEW... 5 Introduction... 5 Typical Applications... 5 Warranty... 5 SYSTEM ARCHITECTURE... 6 SeaBat T50-R...
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar
 Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar Lisa Nicole Brisson, Lead Bathymetry Product Engineer, EdgeTech, Boca Raton, FL Damon Wolfe, Lead Bathymetry Sales Engineer, EdgeTech,
Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar Lisa Nicole Brisson, Lead Bathymetry Product Engineer, EdgeTech, Boca Raton, FL Damon Wolfe, Lead Bathymetry Sales Engineer, EdgeTech,
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements
 Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Data Collection and Processing: Elwha Estuary Survey, February 2013
 Data Collection and Processing: Elwha Estuary Survey, February 2013 Ian Miller, WA Sea Grant Olympic Peninsula Field Office, 1502 E. Lauridsen Blvd #82, Port Angeles, WA 98362 immiller@u.washington.edu
Data Collection and Processing: Elwha Estuary Survey, February 2013 Ian Miller, WA Sea Grant Olympic Peninsula Field Office, 1502 E. Lauridsen Blvd #82, Port Angeles, WA 98362 immiller@u.washington.edu
Sonar Bathymetry: Waquoit Bay NERR
 Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004
 Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Certified Professionals in Hydrographic Solutions
 Certified Professionals in Hydrographic Solutions Client Satisfaction is our Deliverable Port of Brisbane Pty Ltd Port Surveys Certified Professionals in Hydrographic Surveying Tel +61 (0) 7 3258 4820
Certified Professionals in Hydrographic Solutions Client Satisfaction is our Deliverable Port of Brisbane Pty Ltd Port Surveys Certified Professionals in Hydrographic Surveying Tel +61 (0) 7 3258 4820
Bathymetry Data Collection for Subaqueous Soil Mapping. Maggie Payne 2 nd National Workshop on Subaqueous Soils Rhode Island August 9-12, 2010
 Bathymetry Data Collection for Subaqueous Soil Mapping Maggie Payne 2 nd National Workshop on Subaqueous Soils Rhode Island August 9-12, 2010 Overview of Method Collect tide data Collect bathymetry data
Bathymetry Data Collection for Subaqueous Soil Mapping Maggie Payne 2 nd National Workshop on Subaqueous Soils Rhode Island August 9-12, 2010 Overview of Method Collect tide data Collect bathymetry data
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
STUDY REPORT W&AR-03 RESERVOIR TEMPERATURE MODEL ATTACHMENT B DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT
 STUDY REPORT W&AR-03 RESERVOIR TEMPERATURE MODEL ATTACHMENT B DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT Prepared for: TURLOCK IRRIGATION DISTRICT MODESTO
STUDY REPORT W&AR-03 RESERVOIR TEMPERATURE MODEL ATTACHMENT B DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT Prepared for: TURLOCK IRRIGATION DISTRICT MODESTO
Hydrographic Surveying at The Port of London
 Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
PACIFIC NORTHWEST TEST OF A HYDROGRAPHIC AIRBORNE LASER SCANNER
 PACIFIC NORTHWEST TEST OF A HYDROGRAPHIC AIRBORNE LASER SCANNER Green LiDAR Workshop June 3 7, 2012 Russell Faux, Principal Watershed Sciences, Inc. 517 SW 2 nd Street, Suite 400 Corvallis, OR 97333 541
PACIFIC NORTHWEST TEST OF A HYDROGRAPHIC AIRBORNE LASER SCANNER Green LiDAR Workshop June 3 7, 2012 Russell Faux, Principal Watershed Sciences, Inc. 517 SW 2 nd Street, Suite 400 Corvallis, OR 97333 541
WMB-160F Multi-beam Fishing System
 WMB-160F Multi-beam Fishing System Take away the guess work and see what s REALLY below your boat! Seven Systems in One 2 WMB-160F WMB-160F Screen Shots The WMB-160F is a multi-beam sonar that has been
WMB-160F Multi-beam Fishing System Take away the guess work and see what s REALLY below your boat! Seven Systems in One 2 WMB-160F WMB-160F Screen Shots The WMB-160F is a multi-beam sonar that has been
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey
 The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
Small Footprint Topo-Bathymetric LiDAR
 May 8, 2013 Small Footprint Topo-Bathymetric LiDAR PNAMP Remote Sensing Forum Russ Faux, Co-CEO, WSI Amar Nayegandhi, Manager of Elevation Technologies, Dewberry Colin Cooper, Senior Analyst, WSI Watershed
May 8, 2013 Small Footprint Topo-Bathymetric LiDAR PNAMP Remote Sensing Forum Russ Faux, Co-CEO, WSI Amar Nayegandhi, Manager of Elevation Technologies, Dewberry Colin Cooper, Senior Analyst, WSI Watershed
Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways.
 Accura Hydrographic RC Survey Boat Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways. Utilises Sounder & Transducer from CEE
Accura Hydrographic RC Survey Boat Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways. Utilises Sounder & Transducer from CEE
Body Search and Recovery Using Sonar
 Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge
 Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge (Computer Aided Sound speed Technology) Derrick R. Peyton, Steven Smyth, Arnold Furlong ODIM Brooke Ocean Jonathan Beaudoin
Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge (Computer Aided Sound speed Technology) Derrick R. Peyton, Steven Smyth, Arnold Furlong ODIM Brooke Ocean Jonathan Beaudoin
Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys
 Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys Lisa N. Brisson 1, Damon A. Wolfe 1, Matthew Staley P.S.M. 2 1 EdgeTech 4 Little Brook Rd West Wareham, MA 02576 2 USACE
Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys Lisa N. Brisson 1, Damon A. Wolfe 1, Matthew Staley P.S.M. 2 1 EdgeTech 4 Little Brook Rd West Wareham, MA 02576 2 USACE
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE.
 EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS
 INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office
 S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
MULTIBEAM SURVEYS EXTENDED ABOVE THE WATERLINE
 MULTIBEAM SURVEYS EXTENDED ABOVE THE WATERLINE T. J. Mitchell 1, C. A. Miller 2 and T. P. Lee 3 ABSTRACT With the increased need to utilize multibeam bathymetry for volumetric surveys both pre- and post-dredging,
MULTIBEAM SURVEYS EXTENDED ABOVE THE WATERLINE T. J. Mitchell 1, C. A. Miller 2 and T. P. Lee 3 ABSTRACT With the increased need to utilize multibeam bathymetry for volumetric surveys both pre- and post-dredging,
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
CoastaZ Engineering. Technical Note AIRBORNE COASTAL CURRENT EVALUATION SURVEY SYSTEM
 CETN VI-25 (Dee 92) CoastaZ Engineering Technical Note AIRBORNE COASTAL CURRENT EVALUATION SURVEY SYSTEM PURPOSE: This Technical Note introduces a new method for collecting current measurements at multiple
CETN VI-25 (Dee 92) CoastaZ Engineering Technical Note AIRBORNE COASTAL CURRENT EVALUATION SURVEY SYSTEM PURPOSE: This Technical Note introduces a new method for collecting current measurements at multiple
TRANSDUCER RESOURCE GUIDE EN_A
 TRANSDUCER RESOURCE GUIDE 532651-1EN_A THANK YOU! Thank you for choosing Humminbird, the #1 name in marine electronics. Humminbird has built its reputation by designing and manufacturing top quality, thoroughly
TRANSDUCER RESOURCE GUIDE 532651-1EN_A THANK YOU! Thank you for choosing Humminbird, the #1 name in marine electronics. Humminbird has built its reputation by designing and manufacturing top quality, thoroughly
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES
 ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
Product Description EM 3002
 Product Description EM 3002 Multibeam echo sounder Kongsberg EM 3002 Multibeam echo sounder Product description 855-164929 / Rev.A Note Kongsberg Maritime AS makes every effort to ensure that the information
Product Description EM 3002 Multibeam echo sounder Kongsberg EM 3002 Multibeam echo sounder Product description 855-164929 / Rev.A Note Kongsberg Maritime AS makes every effort to ensure that the information
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
LiDAR My favourite tool in the bag 2011 St Kitts & Nevis
 LiDAR My favourite tool in the bag 2011 St Kitts & Nevis Lt Cdr Rupert Forester-Bennett RN (ret d) December 5 th to 11 th 2011 Content Collection of geospatial data reasons Overcoming the White Ribbon
LiDAR My favourite tool in the bag 2011 St Kitts & Nevis Lt Cdr Rupert Forester-Bennett RN (ret d) December 5 th to 11 th 2011 Content Collection of geospatial data reasons Overcoming the White Ribbon
H ydrog ra p h ic S urve y Using SEABAT
 H ydrog ra p h ic S urve y Using SEABAT Hirokazu Mori, Tadashi Yamamoto and Isao Tedokon, Hydrographic Department, Japan Coast Guard The original was written in 1999, and our hydrographic surveys using
H ydrog ra p h ic S urve y Using SEABAT Hirokazu Mori, Tadashi Yamamoto and Isao Tedokon, Hydrographic Department, Japan Coast Guard The original was written in 1999, and our hydrographic surveys using
GNSS Technology for the Determination of Real-Time Tidal Information
 GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President
 Orientation By: Nick Lowell, Founder & President") Lowell Instruments Application Note #TCMA Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President 1 Introduction The TCM-1 Tilt Current Meter (TCM)
Lowell Instruments Application Note #TCMA Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President 1 Introduction The TCM-1 Tilt Current Meter (TCM)
Chapter 10 Lecture Outline. The Restless Oceans
 Chapter 10 Lecture Outline The Restless Oceans Focus Question 10.1 How does the Coriolis effect influence ocean currents? The Ocean s Surface Circulation Ocean currents Masses of water that flow from one
Chapter 10 Lecture Outline The Restless Oceans Focus Question 10.1 How does the Coriolis effect influence ocean currents? The Ocean s Surface Circulation Ocean currents Masses of water that flow from one
Hydrographic Surveying Methods, Applications and Uses
 Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Nearshore Habitat Mapping in Puget Sound Using Side Scan Sonar and Underwater Video
 Nearshore Habitat Mapping in Puget Sound Using Side Scan Sonar and Underwater Video Dana Woodruff, Paul Farley, Amy Borde, John Southard, Ron Thom Battelle Marine Sciences Laboratory Jim Norris Marine
Nearshore Habitat Mapping in Puget Sound Using Side Scan Sonar and Underwater Video Dana Woodruff, Paul Farley, Amy Borde, John Southard, Ron Thom Battelle Marine Sciences Laboratory Jim Norris Marine
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Wade Reynolds 1 Frank Young 1,2 Peter Gibbings 1,2. University of Southern Queensland Toowoomba 4350 AUSTRALIA
 A Comparison of Methods for Mapping Golf Greens Wade Reynolds 1 Frank Young 1,2 Peter Gibbings 1,2 1 Faculty of Engineering and Surveying 2 Australian Centre for Sustainable Catchments University of Southern
A Comparison of Methods for Mapping Golf Greens Wade Reynolds 1 Frank Young 1,2 Peter Gibbings 1,2 1 Faculty of Engineering and Surveying 2 Australian Centre for Sustainable Catchments University of Southern
New Jersey Coastal Zone Overview. The New Jersey Beach Profile Network (NJBPN) 3 Dimensional Assessments. Quantifying Shoreline Migration
 3 Dimensional Assessments. Quantifying Shoreline Migration") New Jersey Coastal Zone Overview The New Jersey Beach Profile Network (NJBPN) Objectives Profile Locations Data Collection Analyzing NJBPN Data Examples 3 Dimensional Assessments Methodology Examples Quantifying
New Jersey Coastal Zone Overview The New Jersey Beach Profile Network (NJBPN) Objectives Profile Locations Data Collection Analyzing NJBPN Data Examples 3 Dimensional Assessments Methodology Examples Quantifying
Course Instructions. 3 Easy Steps to Complete the Course: 1.) Read the Course PDF Below.
 Read the Course PDF Below.") Course Instructions NOTE: The following pages contain a preview of the final exam. This final exam is identical to the final exam that you will take online after you purchase the course. After you purchase
Course Instructions NOTE: The following pages contain a preview of the final exam. This final exam is identical to the final exam that you will take online after you purchase the course. After you purchase
High Precision Hydrography in Canada, the ST. Lawrence River Channel, HD Bathymetry, Production, Distribution and Updating
 High Precision Hydrography in Canada, the ST. Lawrence River Channel, HD Bathymetry, Production, Distribution and Updating Marc Journault Canada CHS, Louis Maltais Canada CHS, and Richard Sanfaçon Canada
High Precision Hydrography in Canada, the ST. Lawrence River Channel, HD Bathymetry, Production, Distribution and Updating Marc Journault Canada CHS, Louis Maltais Canada CHS, and Richard Sanfaçon Canada
AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL
 AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL Jay Wise 1 ABSTRACT Phillips and Jordan, a leading excavating and disaster recovery contractor, was faced with the challenge to manage a civil contract involving
AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL Jay Wise 1 ABSTRACT Phillips and Jordan, a leading excavating and disaster recovery contractor, was faced with the challenge to manage a civil contract involving
R/V Bat Galim EM302 & EM2040 Multibeam Echosounder System Review January 31 February 4, 2016
 R/V Bat Galim EM302 & EM2040 Multibeam Echosounder System Review January 31 February 4, 2016 Report prepared by: Paul D. Johnson University of New Hampshire Center for Coastal and Ocean Mapping / Joint
R/V Bat Galim EM302 & EM2040 Multibeam Echosounder System Review January 31 February 4, 2016 Report prepared by: Paul D. Johnson University of New Hampshire Center for Coastal and Ocean Mapping / Joint
Total Shallow-Water Survey Through Airborne Hydrography
 Total Shallow-Water Survey Through Airborne Hydrography Jennifer M. Wozencraft Joint Airborne Lidar Bathymetry Technical Center of Expertise US Army Corps of Engineers 109 St. Joseph Street Mobile, AL
Total Shallow-Water Survey Through Airborne Hydrography Jennifer M. Wozencraft Joint Airborne Lidar Bathymetry Technical Center of Expertise US Army Corps of Engineers 109 St. Joseph Street Mobile, AL
Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft
 Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
A PRACTICAL APPROACH TO QUALITY CONTROL AND QUALITY ANALYSIS OF DEPTH DATA
 A PRACTICAL APPROACH TO QUALITY CONTROL AND QUALITY ANALYSIS OF DEPTH DATA ABSTRACT Ulf Olsson, Mats Ericson, Stigbjörn Nilsson, Hans Öiås Hydrographic Office, Swedish Maritime Administration, Sweden Quality
A PRACTICAL APPROACH TO QUALITY CONTROL AND QUALITY ANALYSIS OF DEPTH DATA ABSTRACT Ulf Olsson, Mats Ericson, Stigbjörn Nilsson, Hans Öiås Hydrographic Office, Swedish Maritime Administration, Sweden Quality
UNDERWATER SCIENCE. Multibeam Systems TECHNOLOGY FOR SUSTAINABLE FISHERIES
 UNDERWATER SCIENCE Multibeam Systems TECHNOLOGY FOR SUSTAINABLE FISHERIES SIMRAD ME70 SCIENTIFIC MULTIBEAM ECHO SOUNDER A scientific multibeam echo sounder can be seen as many EK sounders spread out in
UNDERWATER SCIENCE Multibeam Systems TECHNOLOGY FOR SUSTAINABLE FISHERIES SIMRAD ME70 SCIENTIFIC MULTIBEAM ECHO SOUNDER A scientific multibeam echo sounder can be seen as many EK sounders spread out in
Tutorial for the. Total Vertical Uncertainty Analysis Tool in NaviModel3
 Tutorial for the Total Vertical Uncertainty Analysis Tool in NaviModel3 May, 2011 1. Introduction The Total Vertical Uncertainty Analysis Tool in NaviModel3 has been designed to facilitate a determination
Tutorial for the Total Vertical Uncertainty Analysis Tool in NaviModel3 May, 2011 1. Introduction The Total Vertical Uncertainty Analysis Tool in NaviModel3 has been designed to facilitate a determination
Introduction. VORF - Model Development and Principles. The required VORF model transformation accuracies were as follows:
 Introduction In 2006, the United Kingdom Hydrographic Office (UKHO) began testing of the Vertical Offshore Reference Frame (VORF), which had been developed on their behalf by the Department of Geomatic
Introduction In 2006, the United Kingdom Hydrographic Office (UKHO) began testing of the Vertical Offshore Reference Frame (VORF), which had been developed on their behalf by the Department of Geomatic
DUKC Chart Overlay. Presentation to IHO TWL and DQ Working Groups Wollongong, March 2014
 DUKC Chart Overlay Presentation to IHO TWL and DQ Working Groups Wollongong, March 2014 Outline Who is OMC? DUKC description & methodology. DUKC Chart Overlay concept. Chart Overlay application example.
DUKC Chart Overlay Presentation to IHO TWL and DQ Working Groups Wollongong, March 2014 Outline Who is OMC? DUKC description & methodology. DUKC Chart Overlay concept. Chart Overlay application example.
OECS Regional Engineering Workshop September 29 October 3, 2014
 B E A C H E S. M A R I N A S. D E S I G N. C O N S T R U C T I O N. OECS Regional Engineering Workshop September 29 October 3, 2014 Coastal Erosion and Sea Defense: Introduction to Coastal Dynamics David
B E A C H E S. M A R I N A S. D E S I G N. C O N S T R U C T I O N. OECS Regional Engineering Workshop September 29 October 3, 2014 Coastal Erosion and Sea Defense: Introduction to Coastal Dynamics David
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions
 Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
R/V Hugh R. Sharp Multibeam Echosounder System Review. Multibeam Advisory Committee Sea Acceptance Team. October 31 st, Report prepared by:
 R/V Hugh R. Sharp Multibeam Echosounder System Review Multibeam Advisory Committee Sea Acceptance Team October 31 st, 2012 Report prepared by: Jonathan Beaudoin Center for Coastal and Ocean Mapping/Joint
R/V Hugh R. Sharp Multibeam Echosounder System Review Multibeam Advisory Committee Sea Acceptance Team October 31 st, 2012 Report prepared by: Jonathan Beaudoin Center for Coastal and Ocean Mapping/Joint
WIND TURBINE SHUTTLE HUISMAN PRODUCT BROCHURE
 WIND TURBINE SHUTTLE HUISMAN PRODUCT BROCHURE WIND TURBINE HUTTLE TABLE OF CONTENTS 01 DESCRIPTION 03 1.1 Vessel General 03 1. Purpose of the Vessel 0 1.3 High Workability 0 1. Installation Scenarios 05
WIND TURBINE SHUTTLE HUISMAN PRODUCT BROCHURE WIND TURBINE HUTTLE TABLE OF CONTENTS 01 DESCRIPTION 03 1.1 Vessel General 03 1. Purpose of the Vessel 0 1.3 High Workability 0 1. Installation Scenarios 05
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Where are the Bathymetric Hot-Spots?
 Where are the Bathymetric Hot-Spots? Dave Monahan Center for Coastal and Ocean Mapping University of New Hampshire If I win really BIG at the Casino tonight Every now and then, there are news stories of
Where are the Bathymetric Hot-Spots? Dave Monahan Center for Coastal and Ocean Mapping University of New Hampshire If I win really BIG at the Casino tonight Every now and then, there are news stories of
page - Laboratory Exercise #5 Shoreline Processes
 page - Laboratory Exercise #5 Shoreline Processes Section A Shoreline Processes: Overview of Waves The ocean s surface is influenced by three types of motion (waves, tides and surface currents). Shorelines
page - Laboratory Exercise #5 Shoreline Processes Section A Shoreline Processes: Overview of Waves The ocean s surface is influenced by three types of motion (waves, tides and surface currents). Shorelines
ENVIRONMENT AGENCY GREAT OUSE AND 100 FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 SITE SURVEY REPORT NO. H6787
 ENVIRONMENT AGENCY GREAT OUSE AND 100FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 NO. H6787 LONGDIN & BROWNING (SURVEYS) LIMITED CHERRY TREE HOUSE CARMARTHEN ROAD SWANSEA SA1 1HE H6787 1 Measured
ENVIRONMENT AGENCY GREAT OUSE AND 100FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 NO. H6787 LONGDIN & BROWNING (SURVEYS) LIMITED CHERRY TREE HOUSE CARMARTHEN ROAD SWANSEA SA1 1HE H6787 1 Measured
Field Evaluation of Sounding Accuracy in Deep Water Multibeam Swath Bathymetry
 Field Evaluation of Sounding Accuracy in Deep Water Multibeam Swath Bathymetry Christian de Moustier Scripps Institution of Oceanography 9500 Gilman Drive, La Jolla, CA 92093-0205, USA Abstract- A new
Field Evaluation of Sounding Accuracy in Deep Water Multibeam Swath Bathymetry Christian de Moustier Scripps Institution of Oceanography 9500 Gilman Drive, La Jolla, CA 92093-0205, USA Abstract- A new
Viva TPS. TS11/15 Total Stations Check and Adjust Procedure. October Summary
 Viva TPS October 2010 TS11/15 Total Stations Summary Leica builds total stations to the highest quality and calibrates each instrument before it leaves the Factory. After the instrument is shipped or used
Viva TPS October 2010 TS11/15 Total Stations Summary Leica builds total stations to the highest quality and calibrates each instrument before it leaves the Factory. After the instrument is shipped or used
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico.
 Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Volume and Shoreline Changes along Pinellas County Beaches during Tropical Storm Debby
 Volume and Shoreline Changes along Pinellas County Beaches during Tropical Storm Debby Ping Wang and Tiffany M. Roberts Coastal Research Laboratory University of South Florida July 24, 2012 Introduction
Volume and Shoreline Changes along Pinellas County Beaches during Tropical Storm Debby Ping Wang and Tiffany M. Roberts Coastal Research Laboratory University of South Florida July 24, 2012 Introduction
2014 Advantage Boating Sail Canada Basic Cruising Standard. Section III: Part B Safety Safety Guidelines and Avoiding Hazards
 Section III: Part B Safety Safety Guidelines and Avoiding Hazards Lesson Outline Lesson Objectives Introduction Navigation lights Distress signals Hazards Radar reflector Summary Quiz 2 Lesson Objectives
Section III: Part B Safety Safety Guidelines and Avoiding Hazards Lesson Outline Lesson Objectives Introduction Navigation lights Distress signals Hazards Radar reflector Summary Quiz 2 Lesson Objectives
Naval Postgraduate School, Operational Oceanography and Meteorology. Since inputs from UDAS are continuously used in projects at the Naval
 How Accurate are UDAS True Winds? Charles L Williams, LT USN September 5, 2006 Naval Postgraduate School, Operational Oceanography and Meteorology Abstract Since inputs from UDAS are continuously used
How Accurate are UDAS True Winds? Charles L Williams, LT USN September 5, 2006 Naval Postgraduate School, Operational Oceanography and Meteorology Abstract Since inputs from UDAS are continuously used