Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
|
|
|
- Howard Edwards
- 5 years ago
- Views:
Transcription


1 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane, QLD, Australia, 14 March


2 ... and found 2
3 Seminar outline AUV platform specifications Hydrographic surveying with AUVs Stereo image odometry Case study NE Myrmidon Reef Other data products Other AUV sensors 3
 - Doppler velocity log - Compass - Pressure - Water chemistry Mission time up to 12 hours 2 km AUV")
4 Flexible, mobile, high resolution data collection device Sensors include - Vision (stereo) - Sonar (multibeam, and fwd obstacle avoidance) - Doppler velocity log - Compass - Pressure - Water chemistry Mission time up to 12 hours 2 km AUV Sirius 4
, Compass (±2 o ) Depth Paroscientific pressure sensor, (0.")
5 AUV platform Vehicle Specifications Depth rating Size Mass Maximum Speed Batteries Propulsion 700 m 2.0 m(l) x 1.5 m(h) x 1.5 m(w) 200 kg 1.2 m/s 1.6 kwh Li-ion pack 3 x 150 W brushless DC thrusters Navigation Attitude/Heading Tilt (±0.5 o ), Compass (±2 o ) Depth Paroscientific pressure sensor, (0.01 %) Velocity RDI Navigator ADCP (1-2mm/s) Altitude RDI Navigator USBL TrackLink 1500 HA (0.2m range, 0.25 o ) GPS Ashtech A12 Optical Sensing Camera Proslica 12bit 1360 x 1024 CCD Lighting 2 x 200 Ws strobe Separation ~1 m between camera and light Acoustic Sensing Multibeam sonar Imaging sonar Obstacle Avoidance Other Sensors CT Fluorometer Communications RF Modem Acoustic Modem Imagenex Delta T Profiling Tritech Seaking lmagenex 852 Echo Sounder Seabird 37SBI Wetlab Ecopuck chlorophyll-a, CDOM, scattering (r) FreeWave TrackLink 5

6 Imagenix Delta T: 260 khz 120 beams 0.75 beam width 120 swath angle 2.49 kg 6
7 Hydrographic surveying with AUVs d (AUV depth) Water level W Sounding equipment Chart datum (cd) D cd D (sounding depths) D cd = D + d - W Seabed 7
8 Error sources in AUV hydrography AUV depth accuracy: Pressure sensor measurement accuracy Pressure to depth conversion Dynamic pressure field due to waves or swell Sounding depth accuracy: Sounding equipment measurement accuracy Ray-bending and the sensitivity to temporal and spatial variations in the SVP Transducer mounting alignment relative to AUV attitude sensor Depth reduction accuracy: Determination of water level relative to the desired datum Datum uncertainty AUV position accuracy: Position measurement accuracy Survey vessel attitude and installation accuracy in the case of USBL Performance of the integrated navigation system to enhance accuracy Sounding position accuracy: AUV attitude accuracy Transducer mounting alignment relative to AUV attitude sensor 8



9 Stereo image odometry Find features in left image Measure altitude and bound search for features in right image Estimate feature locations Check consistency with epipolar geometry Use DVL displacement to estimate motion to next pair. Find correspondences Confirm consistency using RANSAC Bundle adjustment to refine estimate 9

10 Simultaneous Localisation and Mapping 10

11 Case study: NE Myrmidon Reef GBR201107: July seagrass missions 5 reef missions AIMS/JCU/MCI/USyd NE Myrmidon Reef Thimble Shoal Helix Reef seagrass habitats 11
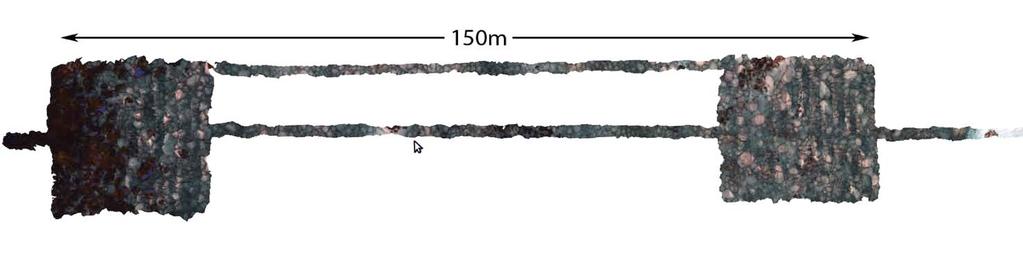
12 Caris HIPS and SIPS NE Myrmidon: 23 July x 10 min lines 30 m x 200 m 2 x dense boxes kn 12

13 Profile-view AUV depths sounding depths 3D-view 13
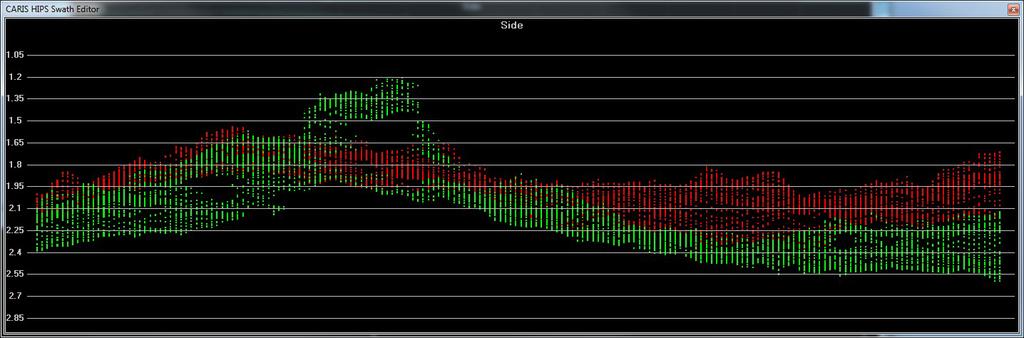
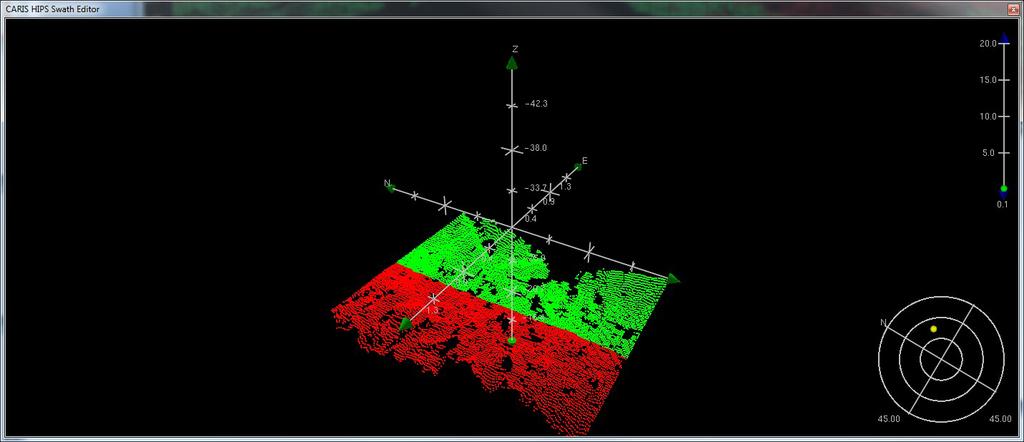
14 Profile-view sounding depths 3D-view 14

15 Subset Editor 15

16 Don t show rejected soundings 16
17 Show rejected soundings very little noise 17
18 Subset Editor 18
19 Coloured by lines 19
 issues geolocated points a few tens of cm apart in")
20 Coloured by depth roll/pitch/latency(?) issues geolocated points a few tens of cm apart in horizontal and vertical planes 20

21 influence of height above seafloor sandwaves slight artefact in overlap swell or wave influence 21
22 Other data products 22

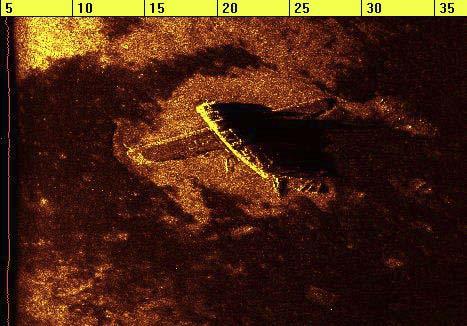
23 Other data products georeferenced image mosiac with 3D relief 23

24 Bathymetry from stereo images 24


25 Other AUV sensors 25
26 Hydrographic surveying with AUVs Stable platform Low platform noise High-performance navigation and positioning solutions Possibility to operate below difficult water layers Increased mapping resolution Increased mapping efficiency (speed) compared to tow-fish and ROV Simultaneous recording of full geophysical sensor suite and oceanographic data Only solution for demanding applications, e.g. deep-water, under ice survey, naval 26


27 Acknowledgments Thomas Bridge, CoE Coral Reef Studies JCU John Guinotte, Marine Conservation Institute Stefan Williams, ACFR Uni of Sydney Rick Morton, Kongsberg Hydroid 27
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology
 How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Axial Base (PN3A) Medium-Power (MP) J-box
 Medium-Power (MP) J-box") Axial Base (PN3A) Medium-Power (MP) J-box Location: 46.1 N, 129.6 W Depth of Water Column: 2654 m This node supports geophysical instruments at the base of Axial Seamount. Instrument Name/Description Data
Axial Base (PN3A) Medium-Power (MP) J-box Location: 46.1 N, 129.6 W Depth of Water Column: 2654 m This node supports geophysical instruments at the base of Axial Seamount. Instrument Name/Description Data
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle
 Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006)
") ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
Sonar Bathymetry: Waquoit Bay NERR
 Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping
 Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries
 N-ICE2015 Norwegian Young Sea ICE cruise 2015 141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries Kronprins Haakon Then and now Fincantieri Hull fabrication
N-ICE2015 Norwegian Young Sea ICE cruise 2015 141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries Kronprins Haakon Then and now Fincantieri Hull fabrication
The SeaBED AUV A Platform for High Resolution Imaging
 The SeaBED AUV A Platform for High Resolution Imaging Hanumant Singh, Ryan Eustice, Chris Roman, Oscar Pizarro, Deep Submergence Laboratory, MS # 7, Woods Hole Oceanographic Institution, Woods Hole MA
The SeaBED AUV A Platform for High Resolution Imaging Hanumant Singh, Ryan Eustice, Chris Roman, Oscar Pizarro, Deep Submergence Laboratory, MS # 7, Woods Hole Oceanographic Institution, Woods Hole MA
Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge
 Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge (Computer Aided Sound speed Technology) Derrick R. Peyton, Steven Smyth, Arnold Furlong ODIM Brooke Ocean Jonathan Beaudoin
Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge (Computer Aided Sound speed Technology) Derrick R. Peyton, Steven Smyth, Arnold Furlong ODIM Brooke Ocean Jonathan Beaudoin
TRIAXYS Acoustic Doppler Current Profiler Comparison Study
 TRIAXYS Acoustic Doppler Current Profiler Comparison Study By Randolph Kashino, Axys Technologies Inc. Tony Ethier, Axys Technologies Inc. Reo Phillips, Axys Technologies Inc. February 2 Figure 1. Nortek
TRIAXYS Acoustic Doppler Current Profiler Comparison Study By Randolph Kashino, Axys Technologies Inc. Tony Ethier, Axys Technologies Inc. Reo Phillips, Axys Technologies Inc. February 2 Figure 1. Nortek
Overview: Underwater sensing
 Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
Application for Consent to Conduct Marine Scientific Research. F Internal Waves in Straits (IWISE) Institution Contact Information Director
 Institution Contact Information Director") 1. General Information 1.1 Reference ID: Application for Consent to Conduct Marine Scientific Research Application number: Project name: F2010-111 Internal Waves in Straits (IWISE) 1.2 Sponsoring institution(s):
1. General Information 1.1 Reference ID: Application for Consent to Conduct Marine Scientific Research Application number: Project name: F2010-111 Internal Waves in Straits (IWISE) 1.2 Sponsoring institution(s):
Regional Hydrographic Research, Studies & Projects
 Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements
 Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
CONSTRUCTION OF LNG RECEIVING TERMINAL ON THE SAINT LAWRENCE TIDAL CURRENT CONDITIONS IN THE LEVIS AREA
 RABASKA PROJECT CONSTRUCTION OF LNG RECEIVING TERMINAL ON THE SAINT LAWRENCE TIDAL CURRENT CONDITIONS IN THE LEVIS AREA FINAL REPORT MARCH 2006 N/Réf. : 24237.360 3075, ch. des Quatre-Bourgeois Sainte-Foy
RABASKA PROJECT CONSTRUCTION OF LNG RECEIVING TERMINAL ON THE SAINT LAWRENCE TIDAL CURRENT CONDITIONS IN THE LEVIS AREA FINAL REPORT MARCH 2006 N/Réf. : 24237.360 3075, ch. des Quatre-Bourgeois Sainte-Foy
S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed.
 S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed. - Operating depth 300 m (500 m optional) - Cruising speed up to 4 knots
S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed. - Operating depth 300 m (500 m optional) - Cruising speed up to 4 knots
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys
 MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Recommended operating guidelines (ROG) for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:
 for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:") Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Data Collection and Processing: Elwha Estuary Survey, February 2013
 Data Collection and Processing: Elwha Estuary Survey, February 2013 Ian Miller, WA Sea Grant Olympic Peninsula Field Office, 1502 E. Lauridsen Blvd #82, Port Angeles, WA 98362 immiller@u.washington.edu
Data Collection and Processing: Elwha Estuary Survey, February 2013 Ian Miller, WA Sea Grant Olympic Peninsula Field Office, 1502 E. Lauridsen Blvd #82, Port Angeles, WA 98362 immiller@u.washington.edu
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
PORTS AUSTRALIA. PRINCIPLES FOR GATHERING AND PROCESSING HYDROGRAPHIC INFORMATION IN AUSTRALIAN PORTS (Version 1.5 November 2012)
") PORTS AUSTRALIA PRINCIPLES FOR GATHERING AND PROCESSING HYDROGRAPHIC INFORMATION IN AUSTRALIAN PORTS (Version 1.5 November 2012) PREFACE These Principles have been prepared by the Hydrographic Surveyors
PORTS AUSTRALIA PRINCIPLES FOR GATHERING AND PROCESSING HYDROGRAPHIC INFORMATION IN AUSTRALIAN PORTS (Version 1.5 November 2012) PREFACE These Principles have been prepared by the Hydrographic Surveyors
An accident at sea, such as an
 Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
AUVs for oceanographic science at IFREMER, project progress and operational feedback
 AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
Survey solutions. catalogue DEEP INSIGHT. SHARPER SENSES.
 Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
MISSION PLANNING AND DATA ACQUISITION SOFTWARE
 MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
GNSS Technology for the Determination of Real-Time Tidal Information
 GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS
 INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office
 S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
WMB-160F Multi-beam Fishing System
 WMB-160F Multi-beam Fishing System Take away the guess work and see what s REALLY below your boat! Seven Systems in One 2 WMB-160F WMB-160F Screen Shots The WMB-160F is a multi-beam sonar that has been
WMB-160F Multi-beam Fishing System Take away the guess work and see what s REALLY below your boat! Seven Systems in One 2 WMB-160F WMB-160F Screen Shots The WMB-160F is a multi-beam sonar that has been
Challenges in determining water surface in airborne LiDAR topobathymetry. Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014
 Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft
 Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
Offshore Wind Energy Stringent quality assurance and quality control. Coastal and Freshwater Fast responding and flexible organisation
 Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
High Precision Hydrography in Canada, the ST. Lawrence River Channel, HD Bathymetry, Production, Distribution and Updating
 High Precision Hydrography in Canada, the ST. Lawrence River Channel, HD Bathymetry, Production, Distribution and Updating Marc Journault Canada CHS, Louis Maltais Canada CHS, and Richard Sanfaçon Canada
High Precision Hydrography in Canada, the ST. Lawrence River Channel, HD Bathymetry, Production, Distribution and Updating Marc Journault Canada CHS, Louis Maltais Canada CHS, and Richard Sanfaçon Canada
Echo Sounder Evaluation of XBT Drop Rate off the coast of Florida
 Echo Sounder Evaluation of XBT Drop Rate off the coast of Florida Lockheed Martin Sippican Grant Johnson Engineering Project Manager Ocean Products 9/22/2010 1 Introduction New fall rate evaluation approach
Echo Sounder Evaluation of XBT Drop Rate off the coast of Florida Lockheed Martin Sippican Grant Johnson Engineering Project Manager Ocean Products 9/22/2010 1 Introduction New fall rate evaluation approach
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
MAPCO2 Buoy Metadata Report Project Title:
 MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
An Integrated Marine Gradiometer Array System (MGA)
") An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments Introduction Tetra Tech EC, Inc.
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Bedform Parameterization and Object Detection from Sonar Data- Application of Finger Print Algorithms
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Bedform Parameterization and Object Detection from Sonar Data- Application of Finger Print Algorithms PI: Arthur C. Trembanis
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Bedform Parameterization and Object Detection from Sonar Data- Application of Finger Print Algorithms PI: Arthur C. Trembanis
from ocean to cloud PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM
 PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
R/V Bat Galim EM302 & EM2040 Multibeam Echosounder System Review January 31 February 4, 2016
 R/V Bat Galim EM302 & EM2040 Multibeam Echosounder System Review January 31 February 4, 2016 Report prepared by: Paul D. Johnson University of New Hampshire Center for Coastal and Ocean Mapping / Joint
R/V Bat Galim EM302 & EM2040 Multibeam Echosounder System Review January 31 February 4, 2016 Report prepared by: Paul D. Johnson University of New Hampshire Center for Coastal and Ocean Mapping / Joint
HUGIN USE OF UUV TECHNOLOGY IN MARINE APPLICATIONS
 HUGIN USE OF UUV TECHNOLOGY IN MARINE APPLICATIONS Per Espen Hagen, Nils J Størkersen Norwegian Defence Research Establishment (FFI) P O Box 25, NO-2027 Kjeller, Norway per-espen.hagen@ffi.no, nils-j.storkersen@ffi.no
HUGIN USE OF UUV TECHNOLOGY IN MARINE APPLICATIONS Per Espen Hagen, Nils J Størkersen Norwegian Defence Research Establishment (FFI) P O Box 25, NO-2027 Kjeller, Norway per-espen.hagen@ffi.no, nils-j.storkersen@ffi.no
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV SYSTEM
 TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
August Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd.
 August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd. Gavia? Gavia immer (common loon; great northern diver) Autonomous
August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd. Gavia? Gavia immer (common loon; great northern diver) Autonomous
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited.
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Multi-Scale (cm to km) Hydrodynamic and Morphologic Interactions in Tidal Inlets and Instrumentation for Measuring Nearshore
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Multi-Scale (cm to km) Hydrodynamic and Morphologic Interactions in Tidal Inlets and Instrumentation for Measuring Nearshore
Saab Seaeye Cougar XT Compact
 The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
Field Evaluation of Sounding Accuracy in Deep Water Multibeam Swath Bathymetry
 Field Evaluation of Sounding Accuracy in Deep Water Multibeam Swath Bathymetry Christian de Moustier Scripps Institution of Oceanography 9500 Gilman Drive, La Jolla, CA 92093-0205, USA Abstract- A new
Field Evaluation of Sounding Accuracy in Deep Water Multibeam Swath Bathymetry Christian de Moustier Scripps Institution of Oceanography 9500 Gilman Drive, La Jolla, CA 92093-0205, USA Abstract- A new
Malta Survey activities
 Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
H ydrog ra p h ic S urve y Using SEABAT
 H ydrog ra p h ic S urve y Using SEABAT Hirokazu Mori, Tadashi Yamamoto and Isao Tedokon, Hydrographic Department, Japan Coast Guard The original was written in 1999, and our hydrographic surveys using
H ydrog ra p h ic S urve y Using SEABAT Hirokazu Mori, Tadashi Yamamoto and Isao Tedokon, Hydrographic Department, Japan Coast Guard The original was written in 1999, and our hydrographic surveys using
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
ENVIRONMENT AGENCY GREAT OUSE AND 100 FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 SITE SURVEY REPORT NO. H6787
 ENVIRONMENT AGENCY GREAT OUSE AND 100FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 NO. H6787 LONGDIN & BROWNING (SURVEYS) LIMITED CHERRY TREE HOUSE CARMARTHEN ROAD SWANSEA SA1 1HE H6787 1 Measured
ENVIRONMENT AGENCY GREAT OUSE AND 100FT DRAIN QUARTERLY BATHYMETRIC SURVEY DECEMBER 2013 NO. H6787 LONGDIN & BROWNING (SURVEYS) LIMITED CHERRY TREE HOUSE CARMARTHEN ROAD SWANSEA SA1 1HE H6787 1 Measured
Autonomous Underwater Vehicles Explorer Class
 Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
MARINE NAVIGATION LESSON PLAN See That Sound?
 Marine Navigation Hydrography Lesson Plan MARINE NAVIGATION LESSON PLAN See That Sound? Theme Hydrographic Survey Links to Overview Essays and Resources Needed for Student Research http://oceanservice.noaa.gov/topics/navops/hydrosurvey/
Marine Navigation Hydrography Lesson Plan MARINE NAVIGATION LESSON PLAN See That Sound? Theme Hydrographic Survey Links to Overview Essays and Resources Needed for Student Research http://oceanservice.noaa.gov/topics/navops/hydrosurvey/
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
EMPA 2017 How can the S-102 Bathymetric Surface Product improve safety in navigation and pilotage?
 EMPA 2017 How can the S-102 Bathymetric Surface Product improve safety in navigation and pilotage? Operated by the Norwegian Mapping Authority, Hydrographic Service FREEDOM TO CHOOSE Content What is the
EMPA 2017 How can the S-102 Bathymetric Surface Product improve safety in navigation and pilotage? Operated by the Norwegian Mapping Authority, Hydrographic Service FREEDOM TO CHOOSE Content What is the
N. Robinson and A. Pyne
 ISSN 0375 8192 March 2004 Antarctic Data Series No 26 WATER COLUMN CURRENT PROFILE ANALYSIS FROM BENEATH THE MCMURDO ICE SHELF AT WINDLESS BIGHT AND UNDER THE SEA ICE IN GRANITE HARBOUR, ANTARCTICA N.
ISSN 0375 8192 March 2004 Antarctic Data Series No 26 WATER COLUMN CURRENT PROFILE ANALYSIS FROM BENEATH THE MCMURDO ICE SHELF AT WINDLESS BIGHT AND UNDER THE SEA ICE IN GRANITE HARBOUR, ANTARCTICA N.
Product Description EM 3002
 Product Description EM 3002 Multibeam echo sounder Kongsberg EM 3002 Multibeam echo sounder Product description 855-164929 / Rev.A Note Kongsberg Maritime AS makes every effort to ensure that the information
Product Description EM 3002 Multibeam echo sounder Kongsberg EM 3002 Multibeam echo sounder Product description 855-164929 / Rev.A Note Kongsberg Maritime AS makes every effort to ensure that the information
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Observed and simulated wavetide interaction in a region of. high tidal flow
 Observed and simulated wavetide interaction in a region of high tidal flow Lewis M*; Chang W; Neill S; Robins P; Hashemi R;Ward S; Piano M * m.j.lewis@bangor.ac.uk (1/12) Summary Dynamically coupled wave-tide
Observed and simulated wavetide interaction in a region of high tidal flow Lewis M*; Chang W; Neill S; Robins P; Hashemi R;Ward S; Piano M * m.j.lewis@bangor.ac.uk (1/12) Summary Dynamically coupled wave-tide
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles
 Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways.
 Accura Hydrographic RC Survey Boat Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways. Utilises Sounder & Transducer from CEE
Accura Hydrographic RC Survey Boat Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways. Utilises Sounder & Transducer from CEE
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
Shallow water Lagrangian floats as versatile sensing and imaging platforms
 Shallow water Lagrangian floats as versatile sensing and imaging platforms Chris Roman, Gabrielle Inglis, Connor Tennant Abstract This paper presents results from recent work using a shallow water Lagrangian
Shallow water Lagrangian floats as versatile sensing and imaging platforms Chris Roman, Gabrielle Inglis, Connor Tennant Abstract This paper presents results from recent work using a shallow water Lagrangian
ENVIRONMENTALLY ADAPTIVE SONAR
 ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
UNDERWATER SCIENCE. Multibeam Systems TECHNOLOGY FOR SUSTAINABLE FISHERIES
 UNDERWATER SCIENCE Multibeam Systems TECHNOLOGY FOR SUSTAINABLE FISHERIES SIMRAD ME70 SCIENTIFIC MULTIBEAM ECHO SOUNDER A scientific multibeam echo sounder can be seen as many EK sounders spread out in
UNDERWATER SCIENCE Multibeam Systems TECHNOLOGY FOR SUSTAINABLE FISHERIES SIMRAD ME70 SCIENTIFIC MULTIBEAM ECHO SOUNDER A scientific multibeam echo sounder can be seen as many EK sounders spread out in
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey
 The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
HYDROGRAPHIC AND SITE SURVEY REPORT
 HYDROGRAPHIC AND SITE SURVEY REPORT Proposed Pen Site at Dounie, Sound of Jura Prepared for: Kames Fish Farming Ltd Kilmelford Argyll PA34 4XA Tel: +44 (0)1631 720699 TransTech Limited www.transtechltd.com
HYDROGRAPHIC AND SITE SURVEY REPORT Proposed Pen Site at Dounie, Sound of Jura Prepared for: Kames Fish Farming Ltd Kilmelford Argyll PA34 4XA Tel: +44 (0)1631 720699 TransTech Limited www.transtechltd.com
INTERNATIONAL HYDROGRAPHIC REVIEW MAY 2015
 OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
Institute of Marine Research
 Institute of Marine Research CRUISE REPORT NO. ** R/V G.O. Sars Cruise No. 2005108 9 th June 24 th June 2005 Coral survey off Northern Norway Principal Scientist J. H. Fosså 2005 Benthic Habitat Research
Institute of Marine Research CRUISE REPORT NO. ** R/V G.O. Sars Cruise No. 2005108 9 th June 24 th June 2005 Coral survey off Northern Norway Principal Scientist J. H. Fosså 2005 Benthic Habitat Research
Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem.
 Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem. S. Afzulpurkar, P. Maurya, G. Navelkar, E. Desa, A. Mascarenhas, N. Dabholkar, R. Madhan 1, S.
Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem. S. Afzulpurkar, P. Maurya, G. Navelkar, E. Desa, A. Mascarenhas, N. Dabholkar, R. Madhan 1, S.
Real Time Surveying GPS and HYDRO Software for Tide and Swell Compensation
 Real Time Surveying GPS and HYDRO Software for Tide and Swell Compensation by Mr Michael Walker, B.Surv. (Otago) HYDRO Division Trimble Navigation New Zealand Ltd. Abstract This paper focuses on the use
Real Time Surveying GPS and HYDRO Software for Tide and Swell Compensation by Mr Michael Walker, B.Surv. (Otago) HYDRO Division Trimble Navigation New Zealand Ltd. Abstract This paper focuses on the use
Field Evaluation of Sounding Accuracy in Deep Water Multibeam Swath Bathymetry
 University of New Hampshire University of New Hampshire Scholars' Repository Center for Coastal and Ocean Mapping Center for Coastal and Ocean Mapping 11-2001 Field Evaluation of Sounding Accuracy in Deep
University of New Hampshire University of New Hampshire Scholars' Repository Center for Coastal and Ocean Mapping Center for Coastal and Ocean Mapping 11-2001 Field Evaluation of Sounding Accuracy in Deep
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
Seaeye Falcon powerful portable versatile
 Seaeye Falcon 12170 powerful portable versatile The powerful, portable and versatile Seaeye Falcon designed for coastal and inshore operations to 300 metres water depth or for fly away operations offshore.
Seaeye Falcon 12170 powerful portable versatile The powerful, portable and versatile Seaeye Falcon designed for coastal and inshore operations to 300 metres water depth or for fly away operations offshore.
Field testing of the Nereus network
 Field testing of the Nereus network Harry Hemond Department of Civil and Environmental Engineering Massachusetts Institute of Technology Cambridge, MA Prior Work: Portable Mass Spectrometer for Metabolic
Field testing of the Nereus network Harry Hemond Department of Civil and Environmental Engineering Massachusetts Institute of Technology Cambridge, MA Prior Work: Portable Mass Spectrometer for Metabolic
Currents measurements in the coast of Montevideo, Uruguay
 Currents measurements in the coast of Montevideo, Uruguay M. Fossati, D. Bellón, E. Lorenzo & I. Piedra-Cueva Fluid Mechanics and Environmental Engineering Institute (IMFIA), School of Engineering, Research
Currents measurements in the coast of Montevideo, Uruguay M. Fossati, D. Bellón, E. Lorenzo & I. Piedra-Cueva Fluid Mechanics and Environmental Engineering Institute (IMFIA), School of Engineering, Research