SIMPACK Biomotion Application of Virtual Human Body Models in MBS Simulation: The Biomotion Car Driver Model and other Applications
|
|
|
- Augustine Higgins
- 6 years ago
- Views:
Transcription

1 SIMPACK Biomotion Application of Virtual Human Body Models in MBS Simulation: The Biomotion Car Driver Model and other Applications 1
2 Biomotion Solutions Launched 2010 as University Spin-off Theoretical Astrophysics & Computational Physics Institute for Sports Science Specialized on active human body Models (e.g. Driver, Operator) SIMPACK Partner Development & Maintenance of SIMPACK/Biomotion Distribution of Biomotion Workbench Engineering Services (SIMPACK/Biomotion) Biomechanical Measurements (Mocap, EMG, Forces ) 2
3 Outline SIMPACK Modules Human Body Model Generator New: Biomotion Car Driver Other Application Examples MOCAP-Data Import Muscle-Skeleton-Models Summary and Outlook 3







4 SIMPACK Modules Biomotion Elements Biomechanical force elements Compatible with Biomotion Workbench Hand-Arm-Controller Controls manual handled devices Control of pressing force Control of position & orientation Motorcycle Rider Driver model for single track vehicles Moves handlebars by hand-armmotion New in 9.6: Biomotion Car Driver 4
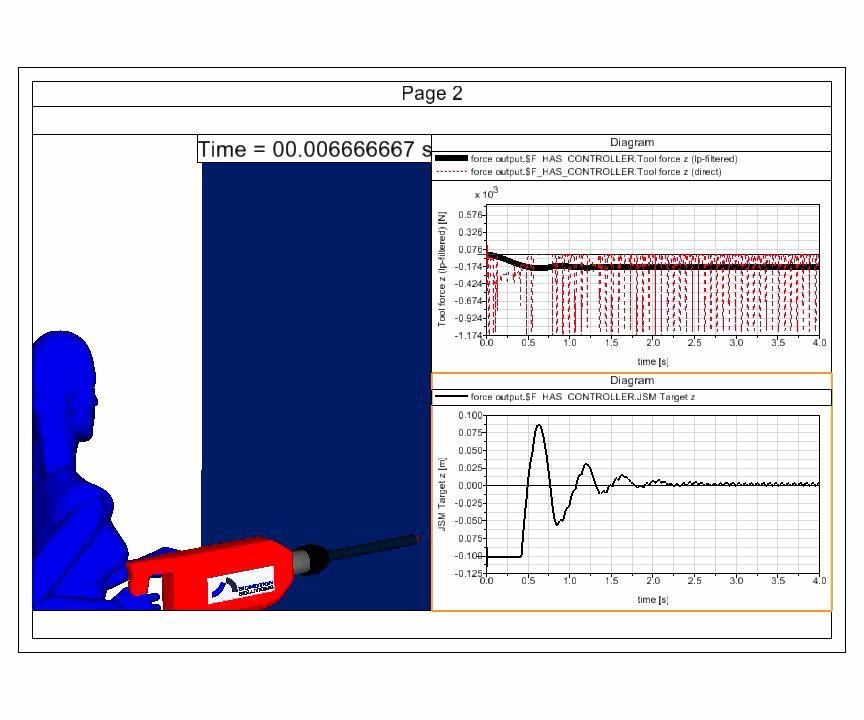
5 Powertool-Operator 5
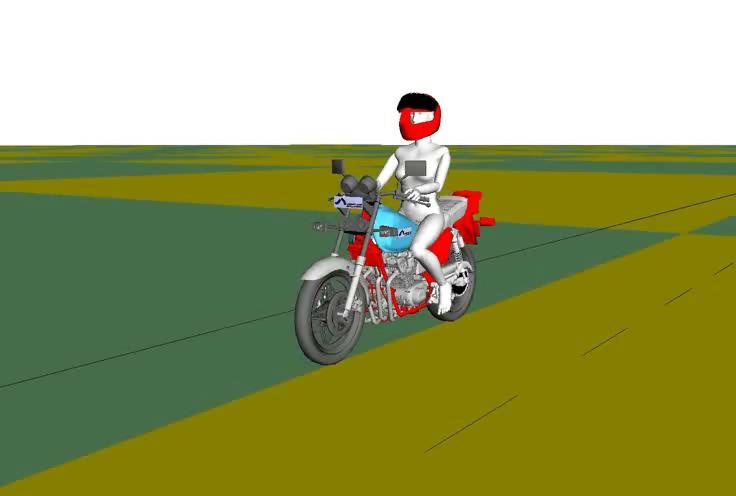
6 Motorcycle Rider 6
7 Outline SIMPACK Modules Human Body Model Generator New: Biomotion Car Driver Other Application Examples MOCAP-Data Import Muscle-Skeleton-Models Summary and Outlook 8

8 Model Generator Model Wizard Size, Weight, Gender Predefined scenarios All necessary bodies and force elements Compatible with SIMPACK Biomotion Modules SIMPACK 9.X Model MOCAP-Import Module 9

9 Model Generator 10


10 Car Model with Substructure 11
11 Outline SIMPACK Modules Human Body Model Generator New: Biomotion Car Driver Other Application Examples MOCAP-Data Import Muscle-Skeleton-Models Summary and Outlook 12


12 Biomotion Car Driver Biomechanical driver: Human as actuator Control of the steering wheel Calculate forces and moments generated by the driver 13


13 Active Driver Model Hold Steering Angle 1 DOF Check if the car will stay on the right track Change Steering Angle 14

14 The Joint Space Model Steering 1DOF Upper Limbs 12 DOF How to solve? internal model needed Cerebellum = metric tensor Joint Space Model 15

15 Biomotion Car Driver Interface to SIMPACK Driver Track Control - CE 287 Track Control - CE

16 Biomotion Car Driver Interface to SIMPACK Driver 17

17 Simulation Based Drivability Rating 18

18 Drivability Rating - Testing 1. acc headrest 2. Acc backrest 3. Acc seatrail 4. Acc steering 5. Clutch pedal 6. Acc COM 7. Acc gearlever 8. Electric load 9. CAN bus
19 Drivability Rating Metrics Defined maneuvers Defined sensors Correlation between drivers subjective rating and measured data Metrics for drivability rating Drivability assessment Rating Evaluation 9-10 excellent 8-9 good 7-8 satisfying 6-7 acceptable 5-6 poor 4-5 unacceptable 3-4 defective 2-3 unsafe 1-2 no operation 20
20 Process of shift comfort optimization Drivability rating solutions are deployed during testing Drivability is calculated by a complex metric based on physical measurements. Testing with defined maneuvers - For shift comfort: Tip in, Tip out What if during start testing they find issues with: Vehicle Suspension Engine Transmission Controls Driveline It is very late in the vehicle process! May prevent release of the vehicle to production 21
![Drivability Rating - Simulation From:[Froschhammer et al, 2009]: Franz Froschhammer, Marcus Schittenhelm, Rainer Keppler](/docs-images/74/71138362/images/21-1.jpg "(2009): BMW High-Dynamic Test Benches using SIMPACK Real-Time Models, SIMPACK News November 2010 - download: www.simpack.")
21 Drivability Rating - Simulation From:[Froschhammer et al, 2009]: Franz Froschhammer, Marcus Schittenhelm, Rainer Keppler (2009): BMW High-Dynamic Test Benches using SIMPACK Real-Time Models, SIMPACK News November download: 22
22 Shift Comfort Optimization Process Engine & Transmission Dyno dspace SIMPACK Realtime Model Perform the same maneuver as with the drivability rating system Results from SIMPACK RT model can be used to calculate the drivability rating But: No driver in the model! Major difference in just looking at the chassis acceleration data for events compared to the data they see at the seat and head rest Need for an active occupant model to close this gap! Driveability Rating 23

23 Drivability Rating - Simulation 1. Acc headrest 2. Acc backrest 3. Acc seatrail 4. Acc steering 5. Clutch pedal 6. Acc COM 7. Acc gearlever 8. Electric load 9. CAN bus Drivers influence on measurement? 5 24
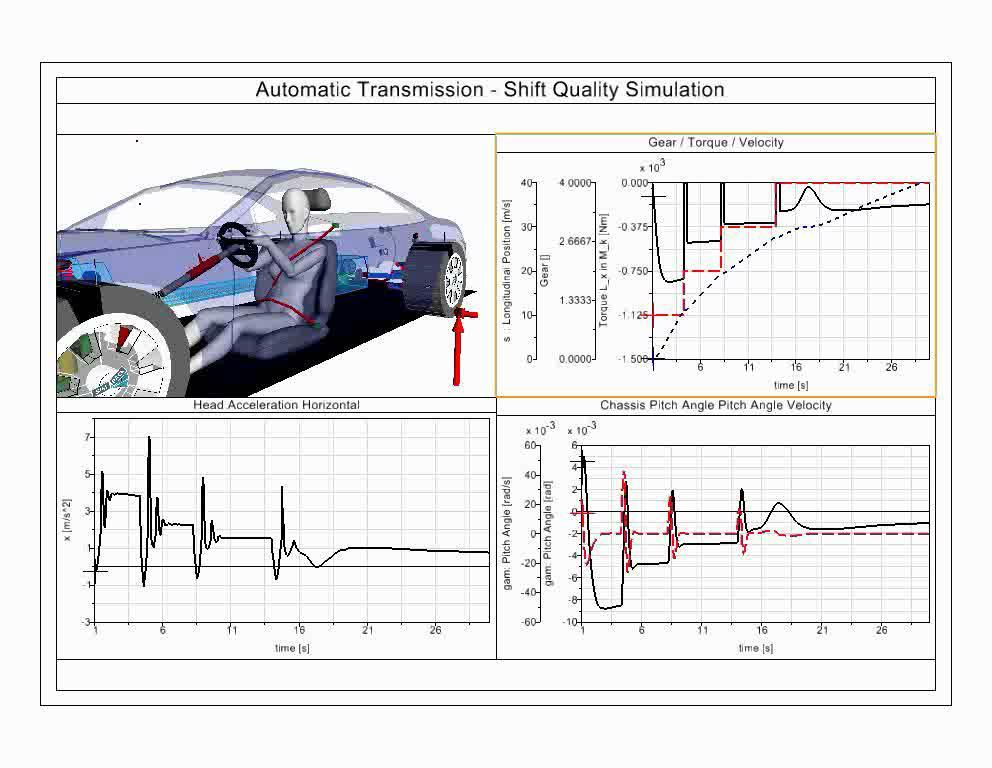
24 Longitudinal Dynamics 25
25 Extended Shift Comfort Optimization Process Engine & Transmission Dyno dspace SIMPACK Realtime Model Excitation Driveability Rating Complementing data with drivers influence SIMPACK Offline-Model With Biomotion Driver 26
26 Outline SIMPACK Modules Human Body Model Generator New: Biomotion Car Driver Other Application Examples MOCAP-Data Import Muscle-Skeleton-Models Summary and Outlook 28
27 Import Motion Capturing Data 29
28 Import Motion Capturing Data 30

29 Import Motion Capturing Data 31
30 Import Motion Capturing Data 32
31 Import Motion Capturing Data 33

32 Import Motion Capturing Data 34

33 Import Motion Capturing Data 35

34 Methods: EMG-Measurement Bipolar Surface EMG 16 electrodes Samplingrate: 3000Hz 37
 Frame rate: 100 fps Cams mounted parallel to motion")
35 Methods: 2D-Videocapturing Marker Nummer Struktur 1 Handgelenk 2 Ellenbogengelenk 3 Kopf 4 Schultergelenk 5 Rippenbogen 6 Hüftgelenk 7 Kniegelenk Oberes 8 Sprunggelenk 9 Ferse 10 Mittelfuß 11 Zehengelenk 3 high speed video cams (Basler 602f) Frame rate: 100 fps Cams mounted parallel to motion plane 38

36 Methods: SRM-System and PowerTec SRM-System by Schoberer Rad Messtechnik, Germany Ergometer: continous brake power up to 2000 Watt Cranc lenght during measurement 175 mm 39
 Automatic and sub pixel accurate tracking of marker")
37 Processing of measurement data: :Video Data Software: TraXXol (Workbench, Biomotion Solutions) Automatic and sub pixel accurate tracking of marker coordinates 41

38 Processing of measurement data: EMG Processing of EMG-data by software DiaMess Correction of artifacts by moving average method EMG synchronized to video trigger Result: averaged EMG activation pattern dependent from cranc angle 42




39 Simulation: SIMPACK Biomotion Muscle-skeleton-model with full set of muscles based on data published by DELP Software: SIMPACK/Biomotion Muskel force elements by Hill / Hatze Reduced model: Only measured muscles are active 43
40 Muscle-Skeleton-Model: Controlling the lenght of the muscle ( -model EPH) Set Value for cranc orientation given by speed Vector of target muscle lenghts (CE) as function of cranc angle Phase Correction (orientation feedback) 44

41 Bicycle Pedaling with Muscle Skeletal Model Realistic kinematics generated by stimulated muscle elements Ongoing Project Validation by comparison to EMG and pedaling forces If necessary modification of muscle controller 45
42 Outline SIMPACK Modules Human Body Model Generator New: Biomotion Car Driver Other Application Examples MOCAP-Data Import Muscle-Skeleton-Models Summary and Outlook 46

43 Smart Model vs DUMMY Smart Model Dummy Model 47
44 Summary Biomotion Solutions software and SIMPACK/Biomotion enable the fast and effective analysis of human-machine interaction. The new Car Driver module which is available since SIMPACK 9.6 allows for simulation of human biomechanical influence on the vehicle dynamics. The new Biomotion Workbench enables the easy import of mocap data in SIMPACK 9.X simulations. Active Hill-Type muscle force elements are currently under development and will be available in SIMPACK Biomotion. For car simulation smart occupant models are under development which will enhance the car driver module in upcoming versions. 48

45 Thank you for your attention! CONTACT: LinkedIn: 49
The Application of Human Body Models in SIMPACK
 The Application of Human Body Models in SIMPACK Dr. Valentin Keppler, Biomotion Solutions www.biomotion-solutions.com keppler@biomotion-solutions.com 4/15/2011 SIMPACK Usermeeting 2011 1 The Human Factor
The Application of Human Body Models in SIMPACK Dr. Valentin Keppler, Biomotion Solutions www.biomotion-solutions.com keppler@biomotion-solutions.com 4/15/2011 SIMPACK Usermeeting 2011 1 The Human Factor
Development of a Detailed Multi-Body Computational Model of an ATV to Address and Prevent Child Injuries. Chandra K. Thorbole, Ph.D.
 Development of a Detailed Multi-Body Computational Model of an ATV to Address and Prevent Child Injuries Chandra K. Thorbole, Ph.D. September 27, 2016 UMTRI,Ann Arbor, MI Presentation Outline Goal Research
Development of a Detailed Multi-Body Computational Model of an ATV to Address and Prevent Child Injuries Chandra K. Thorbole, Ph.D. September 27, 2016 UMTRI,Ann Arbor, MI Presentation Outline Goal Research
REAL. Simple, Intuitive, Powerful Real.
 REAL Simple, Intuitive, Powerful Real. When we set out to define the bikefitting.com toolset engineered by Shimano Dynamics Lab, these were a few of the stand out priorities we wanted to achieve. We delivered.
REAL Simple, Intuitive, Powerful Real. When we set out to define the bikefitting.com toolset engineered by Shimano Dynamics Lab, these were a few of the stand out priorities we wanted to achieve. We delivered.
OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING
 OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING Erich Ramschak Dr. Jürgen Holzinger Erik Bogner AVL List GmbH erich.ramschak@avl.com ConCar-Forum Berlin 5.-6.July 2017
OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING Erich Ramschak Dr. Jürgen Holzinger Erik Bogner AVL List GmbH erich.ramschak@avl.com ConCar-Forum Berlin 5.-6.July 2017
Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II.
 Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II Giuseppe Callea BhaiTech Technology BhaiTech Technology 1 Company Presentation Brief Recall
Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II Giuseppe Callea BhaiTech Technology BhaiTech Technology 1 Company Presentation Brief Recall
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
COMPARISON DRIVO - DIRETO
 COMPARISON DRIVO - DIRETO EN DRIVO Interactive hometrainer with direct transmission Simply choose the course or the training program and Drivo will automatically adjust resistance. Simulates Challenging
COMPARISON DRIVO - DIRETO EN DRIVO Interactive hometrainer with direct transmission Simply choose the course or the training program and Drivo will automatically adjust resistance. Simulates Challenging
Science&Motion. SAM BalanceLab. Sports. control the invisible. Most advanced pressure plate for coaching
 SAM BalanceLab Science&Motion Sports control the invisible Most advanced pressure plate for coaching Balance - the invisible key to success Stop the guesswork and start to rely on facts Science and Motion
SAM BalanceLab Science&Motion Sports control the invisible Most advanced pressure plate for coaching Balance - the invisible key to success Stop the guesswork and start to rely on facts Science and Motion
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS
 SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS") www.euroncap.com EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS Version 1.0a December 2004 Sled Test Procedure for Assessing Knee Impact Areas (V1.0a)
www.euroncap.com EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS Version 1.0a December 2004 Sled Test Procedure for Assessing Knee Impact Areas (V1.0a)
The SaveCAP project: Cyclist and pedestrian protection
 The SaveCAP project: Cyclist and pedestrian protection Carmen Rodarius Stefanie de Hair Margriet van Schijndel 1 BGS Aim SaveCAP project Development of Vulnerable Road Users protection measures Project
The SaveCAP project: Cyclist and pedestrian protection Carmen Rodarius Stefanie de Hair Margriet van Schijndel 1 BGS Aim SaveCAP project Development of Vulnerable Road Users protection measures Project
Summary. cross-country sit-sky. tests. subjects & materials. biomechanical model. results. discusison. conclusions
 Summary cross-country sit-sky tests subjects & materials biomechanical model results discusison conclusions Double Poling in cross-country sit ski Progression achieved by pushing symmetrically on two hand-held
Summary cross-country sit-sky tests subjects & materials biomechanical model results discusison conclusions Double Poling in cross-country sit ski Progression achieved by pushing symmetrically on two hand-held
ME 8843-Advanced Mechatronics. Project Proposal-Automatic Bike Transmission
 ME 8843-Advanced Mechatronics Project Proposal-Automatic Bike Transmission 1/21/09 Razid Ahmad Brandon Borm Todd Sifleet Project Proposal: Our goal for the semester long project is to create and automatic
ME 8843-Advanced Mechatronics Project Proposal-Automatic Bike Transmission 1/21/09 Razid Ahmad Brandon Borm Todd Sifleet Project Proposal: Our goal for the semester long project is to create and automatic
push your limits Trainer overview EN
 push your limits Trainer overview 2018-2019 EN Get inspired and motivated to push your limits by our innovative, high quality trainers Tacx trainers are approved by TRAINER OPTIONS There are three categories,
push your limits Trainer overview 2018-2019 EN Get inspired and motivated to push your limits by our innovative, high quality trainers Tacx trainers are approved by TRAINER OPTIONS There are three categories,
Copyright Velocomp LLP 2006
 ibike Pro Cadence Handlebar Mount Owners Manual January 2007 1 Table of Contents Installing the ibike Pro cadence mount on your bicycle Installing the ibike Pro cadence mount on your time trial bike Installing
ibike Pro Cadence Handlebar Mount Owners Manual January 2007 1 Table of Contents Installing the ibike Pro cadence mount on your bicycle Installing the ibike Pro cadence mount on your time trial bike Installing
SCHEINWORKS Measuring and Analysis Systems by
 Pressure Measurement Systems for standing and walking analysis Germany since 1879 Pressure Measurement Systems for standing and walking analysis Documentation of Gait image Stance Symmetry of all parameters
Pressure Measurement Systems for standing and walking analysis Germany since 1879 Pressure Measurement Systems for standing and walking analysis Documentation of Gait image Stance Symmetry of all parameters
PRODUCT INFO SHEET. NEO 2 Smart. PRODUCT INFO NEO 2 Smart T Box
 PRODUCT INFO SHEET NEO 2 Smart Last updated: October 19, 2018 Product name SKU code MOQ Packaging (box/card) EAN product EAN MOQ Product category Country of origin Dimensions (LxBxH)(cm-in) Dimensions
PRODUCT INFO SHEET NEO 2 Smart Last updated: October 19, 2018 Product name SKU code MOQ Packaging (box/card) EAN product EAN MOQ Product category Country of origin Dimensions (LxBxH)(cm-in) Dimensions
Skippy: Reaching for the Performance Envelope
 Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Functional Development Process of the electric Anti-Roll-Stabilizer ears. Dipl. Ing. Daniel Lindvai-Soos Dr. techn.
 Functional Development Process of the electric Anti-Roll-Stabilizer ears Dipl. Ing. Daniel Lindvai-Soos Dr. techn. Walter Rosinger AGENDA Introduction Magna Project House Functional Development Process
Functional Development Process of the electric Anti-Roll-Stabilizer ears Dipl. Ing. Daniel Lindvai-Soos Dr. techn. Walter Rosinger AGENDA Introduction Magna Project House Functional Development Process
Self-Driving Vehicles That (Fore) See
 See") Self-Driving Vehicles That (Fore) See Dariu M. Gavrila Intelligent Vehicles, TU Delft Berlin Tech.AD, March 5, 2018 Personal Introduction: Dariu M. Gavrila Born in Cluj (Romania) 1990 Doktoraal Degree
Self-Driving Vehicles That (Fore) See Dariu M. Gavrila Intelligent Vehicles, TU Delft Berlin Tech.AD, March 5, 2018 Personal Introduction: Dariu M. Gavrila Born in Cluj (Romania) 1990 Doktoraal Degree
Know your movement. Enhance your performance through biomechanics with Q RINGS & 2INpower
 Know your movement Enhance your performance through biomechanics with Q RINGS & 2INpower Why Q RINGS? Q RINGS are oval chainrings designed to increase performance of cyclists by reducing the impact of
Know your movement Enhance your performance through biomechanics with Q RINGS & 2INpower Why Q RINGS? Q RINGS are oval chainrings designed to increase performance of cyclists by reducing the impact of
Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated Driving Systems
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated
CSM Measurement Technology in the Formula E
 CSM Measurement Technology in the Formula E Case study, August 2015 in collaboration with ABT Sportsline GmbH Author: Jens Häberle, Technical Manager E-Mobility CSM Measurement Technology in the Formula
CSM Measurement Technology in the Formula E Case study, August 2015 in collaboration with ABT Sportsline GmbH Author: Jens Häberle, Technical Manager E-Mobility CSM Measurement Technology in the Formula
Speed Control System Design in Bicycle Robot by Low Power Method. Abstract
 The 2 nd RMUTP International Conference 2010 Page 195 Speed Control System Design in Bicycle Robot by Low Power Method Sunthorn Wiriya, Nikom Distaklu and Suppachai Howimanporn*. Department of Electrical
The 2 nd RMUTP International Conference 2010 Page 195 Speed Control System Design in Bicycle Robot by Low Power Method Sunthorn Wiriya, Nikom Distaklu and Suppachai Howimanporn*. Department of Electrical
Bicycle Fit Services
 Bicycle Fit Services Fitting Services (click to go to) - Premium 3D Motion Capture Bike Fit ~ $399 - Complete 3D Motion Capture Bike Fit ~ $299 - Multi-Bike Complete 3D Motion Capture Bike Fit ~ $474-2D
Bicycle Fit Services Fitting Services (click to go to) - Premium 3D Motion Capture Bike Fit ~ $399 - Complete 3D Motion Capture Bike Fit ~ $299 - Multi-Bike Complete 3D Motion Capture Bike Fit ~ $474-2D
2018 ACCESSORY ATTACHMENTS OWNER S MANUAL
 2018 ACCESSORY ATTACHMENTS OWNER S MANUAL WWW.RADPOWERBIKES.COM We are here to help! Please contact us at SUPPORT@RADPOWERBIKES.COM or 1-800-939-0310 if you have questions. REV031418 Welcome Thanks you
2018 ACCESSORY ATTACHMENTS OWNER S MANUAL WWW.RADPOWERBIKES.COM We are here to help! Please contact us at SUPPORT@RADPOWERBIKES.COM or 1-800-939-0310 if you have questions. REV031418 Welcome Thanks you
SCOTT BICYCLES OWNERS MANUAL Content
 manual MC-Serie_ A5 _E 30.09.2003 15:13 Uhr Seite 2 SCOTT BICYCLES The Genius MC should be adjusted exactly to the current rider for reaching maximum safety and fun while riding. All adjustments should
manual MC-Serie_ A5 _E 30.09.2003 15:13 Uhr Seite 2 SCOTT BICYCLES The Genius MC should be adjusted exactly to the current rider for reaching maximum safety and fun while riding. All adjustments should
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Statistics of Bicycle Rider Motion
 Procedia Engineering 002 (2010) 1 62937 2942 Procedia Engineering www.elsevier.com/locate/procedia Statistics of Bicycle Rider Motion Jason K. Moore a,, Mont Hubbard a, A. L. Schwab b, J. D. G. Kooijman
Procedia Engineering 002 (2010) 1 62937 2942 Procedia Engineering www.elsevier.com/locate/procedia Statistics of Bicycle Rider Motion Jason K. Moore a,, Mont Hubbard a, A. L. Schwab b, J. D. G. Kooijman
A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL
 A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL L Boddy and T Clarke, Austal Ships, Australia SUMMARY CFD analysis has been conducted on a 100m catamaran hull
A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL L Boddy and T Clarke, Austal Ships, Australia SUMMARY CFD analysis has been conducted on a 100m catamaran hull
Simulation-based design to reduce metabolic cost
 Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
SCOTT BICYCLES. manual_rcseries_e :02 Uhr Seite 2 CONTENT
 manual_rcseries_e 23.06.2004 15:02 Uhr Seite 2 SCOTT BICYCLES CONTENT > Genius-Concept / Characteristics P. 02 > Kinematics P. 03 > Shock-Technology P. 03 > Set-Up Genius RC P. 04 > Bottle-Cages P. 04
manual_rcseries_e 23.06.2004 15:02 Uhr Seite 2 SCOTT BICYCLES CONTENT > Genius-Concept / Characteristics P. 02 > Kinematics P. 03 > Shock-Technology P. 03 > Set-Up Genius RC P. 04 > Bottle-Cages P. 04
Muscles force and joints load simulation of bicycle riding using multibody models
 Available online at www.sciencedirect.com Procedia Engineering 13 (2011) 81 87 5 th Asia-Pacific Congress on Sports Technology (APCST) Muscles force and joints load simulation of bicycle riding using multibody
Available online at www.sciencedirect.com Procedia Engineering 13 (2011) 81 87 5 th Asia-Pacific Congress on Sports Technology (APCST) Muscles force and joints load simulation of bicycle riding using multibody
Simulation of the Hybtor Robot
 Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Drift indication for helicopter approach and landing
 www.dlr.de Chart 1 Drift indication for helicopter approach and landing Sven Schmerwitz, Patrizia Knabl, Hans-Ullrich Döhler, and Thomas Lüken www.dlr.de Chart 2 Overview Overview Brownout mitigation Motivation
www.dlr.de Chart 1 Drift indication for helicopter approach and landing Sven Schmerwitz, Patrizia Knabl, Hans-Ullrich Döhler, and Thomas Lüken www.dlr.de Chart 2 Overview Overview Brownout mitigation Motivation
Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors of success in ball striking.
 Full Swing Analysis What are we trying to accomplish? Core Competencies in the Full Swing Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors
Full Swing Analysis What are we trying to accomplish? Core Competencies in the Full Swing Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors
Low Risk Deployment Passenger Airbag CAE Applications & Strategy
 Low Risk Deployment Passenger Airbag CAE Applications & Strategy Bill Feng Jaguar Land Rover Abstract Occupants who were out-of-position (OOP) in the vehicles would increase the risk of airbag induced
Low Risk Deployment Passenger Airbag CAE Applications & Strategy Bill Feng Jaguar Land Rover Abstract Occupants who were out-of-position (OOP) in the vehicles would increase the risk of airbag induced
Real-Time Smoothness Measurements on Concrete Pavements During Construction
 Recommended Practice for Real-Time Smoothness Measurements on Concrete Pavements During Construction XX-## (2017) 1. SCOPE 1.1. This document provides language that can be used by an Owner-Agency to develop
Recommended Practice for Real-Time Smoothness Measurements on Concrete Pavements During Construction XX-## (2017) 1. SCOPE 1.1. This document provides language that can be used by an Owner-Agency to develop
Biomechanical Analysis of the Shot- Put Event at the 2004 Athens Olympic Games
 Biomechanical Analysis of the Shot- Put Event at the 2004 Athens Olympic Games By Gideon Ariel, Ann Penny, John Probe, Rudolf Buijs, Erik Simonsen Alfred Finch, and Larry Judge ISBS 2005 Beijing China
Biomechanical Analysis of the Shot- Put Event at the 2004 Athens Olympic Games By Gideon Ariel, Ann Penny, John Probe, Rudolf Buijs, Erik Simonsen Alfred Finch, and Larry Judge ISBS 2005 Beijing China
MANUAL POSITION SIMULATOR
 Introduction The Position Simulator has been developed to round off the Bikefitting.com Standard analysis. This device is very unique because you can determine exactly the right seat-angle. The measurement
Introduction The Position Simulator has been developed to round off the Bikefitting.com Standard analysis. This device is very unique because you can determine exactly the right seat-angle. The measurement
Collision Avoidance based on Camera and Radar Fusion. Jitendra Shah interactive Summer School 4-6 July, 2012
 Collision Avoidance based on Camera and Radar Fusion Jitendra Shah interactive Summer School 4-6 July, 2012 Agenda Motivation Perception requirements for collision avoidance Situation classification and
Collision Avoidance based on Camera and Radar Fusion Jitendra Shah interactive Summer School 4-6 July, 2012 Agenda Motivation Perception requirements for collision avoidance Situation classification and
PARA-CYCLING CLARIFICATION GUIDE UCI TECHNICAL REGULATIONS
 PARA-CYCLING CLARIFICATION GUIDE UCI TECHNICAL REGULATIONS This document does not replace Articles 16.14.001 to 16.17.014 of the UCI Regulations, but rather complements them and illustrates the technical
PARA-CYCLING CLARIFICATION GUIDE UCI TECHNICAL REGULATIONS This document does not replace Articles 16.14.001 to 16.17.014 of the UCI Regulations, but rather complements them and illustrates the technical
Exemplary Conditional Automation (Level 3) Use Case Description Submitted by the Experts of OICA as input to the IWG ITS/AD
 Use Case Description Submitted by the Experts of OICA as input to the IWG ITS/AD") Submitted by OICA Document No. ITS/AD-06-05 (6th ITS/AD, 3 November 2015, agenda item 3-2) Exemplary Conditional Automation (Level 3) Use Case Description Submitted by the Experts of OICA as input to the
Submitted by OICA Document No. ITS/AD-06-05 (6th ITS/AD, 3 November 2015, agenda item 3-2) Exemplary Conditional Automation (Level 3) Use Case Description Submitted by the Experts of OICA as input to the
Bicycling Simulator Calibration: Proposed Framework
 Article Bicycling Simulator Calibration: Proposed Framework Transportation Research Record 1 8 Ó National Academy of Sciences: Transportation Research Board 2018 Reprints and permissions: sagepub.com/journalspermissions.nav
Article Bicycling Simulator Calibration: Proposed Framework Transportation Research Record 1 8 Ó National Academy of Sciences: Transportation Research Board 2018 Reprints and permissions: sagepub.com/journalspermissions.nav
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Lockstep. Reference Manual. Last updated on September 23, Figure 53, LLC
 Lockstep Reference Manual Last updated on September 23, 2016 Figure 53, LLC 2018 Table of Contents Table of Contents Support Lockstep Documentation 1 2 3 Support Lockstep Support 3 Lockstep Documentation
Lockstep Reference Manual Last updated on September 23, 2016 Figure 53, LLC 2018 Table of Contents Table of Contents Support Lockstep Documentation 1 2 3 Support Lockstep Support 3 Lockstep Documentation
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
Aalborg Universitet. Publication date: Document Version Accepted author manuscript, peer reviewed version
 Aalborg Universitet Automatic Detection Of Conflicts At Signalized Intersections Madsen, Tanja Kidholm Osmann; Bahnsen, Chris Holmberg; Lahrmann, Harry Spaabæk; Moeslund, Thomas B. Publication date: 2014
Aalborg Universitet Automatic Detection Of Conflicts At Signalized Intersections Madsen, Tanja Kidholm Osmann; Bahnsen, Chris Holmberg; Lahrmann, Harry Spaabæk; Moeslund, Thomas B. Publication date: 2014
Unit Five : Driving In Neighborhoods
 Unit Five : Driving In Neighborhoods What Are We Going To Do Today? Students will be able to describe the skills necessary to How safely and do legally you make drive in a residential How do area. you
Unit Five : Driving In Neighborhoods What Are We Going To Do Today? Students will be able to describe the skills necessary to How safely and do legally you make drive in a residential How do area. you
NHL & NHLPA Future Goals Program Hockey Scholar TM
 Curriculum Guide NHL & NHLPA Future Goals Program Hockey Scholar TM Your local NHL team has made it all the way to the Stanley Cup Final and now you just need to win 4 games to bring home the cup! You
Curriculum Guide NHL & NHLPA Future Goals Program Hockey Scholar TM Your local NHL team has made it all the way to the Stanley Cup Final and now you just need to win 4 games to bring home the cup! You
United States Patent (19) Kamenov
 Kamenov") United States Patent (19) Kamenov 11 Patent Number: (45) Date of Patent: 4,976,451 Dec. 11, 1990 54 HUMAN POWERED VEHICLE 76 Inventor: Kamen G. Kamenov, 244 4th Ave., San Francisco, Calif. 941 18 21 Appl.
United States Patent (19) Kamenov 11 Patent Number: (45) Date of Patent: 4,976,451 Dec. 11, 1990 54 HUMAN POWERED VEHICLE 76 Inventor: Kamen G. Kamenov, 244 4th Ave., San Francisco, Calif. 941 18 21 Appl.
Create a road in your house
 2016.5.20 All cyclists should be able to enjoy sport cycling without regard for the place or time. We want cyclists to be able to ride as hard as they want indoors regardless of the weather or time of
2016.5.20 All cyclists should be able to enjoy sport cycling without regard for the place or time. We want cyclists to be able to ride as hard as they want indoors regardless of the weather or time of
SIMON Simulation of Non-Automotive Vehicle Free Rolling Response
 SIMON Simulation of Non-Automotive Vehicle Free Rolling Response Ciro Ramirez, PhD, PE, CSHO, C. L. Long, Jr., P.E., and R. Joe Thornhill, PhD, PE, CSHO Thornhill, Ramirez & Associates, Inc. Copyright
SIMON Simulation of Non-Automotive Vehicle Free Rolling Response Ciro Ramirez, PhD, PE, CSHO, C. L. Long, Jr., P.E., and R. Joe Thornhill, PhD, PE, CSHO Thornhill, Ramirez & Associates, Inc. Copyright
WorldSID 5% Dummy Model Development in Cooperation with German Automotive Industry
 14 th International LS-DYNA Users Conference Session: Occupant Safety WorldSID 5% Dummy Model Development in Cooperation with German Automotive Industry Sebastian Stahlschmidt, George Dumitru, Yupeng Huang,
14 th International LS-DYNA Users Conference Session: Occupant Safety WorldSID 5% Dummy Model Development in Cooperation with German Automotive Industry Sebastian Stahlschmidt, George Dumitru, Yupeng Huang,
National Standard for Cycle Training - NSI
 National Standard for Cycle Training - NSI The National Standard for cycle training was reviewed and updated in 2012. This introduction sets the revised National Standard into context and presents the
National Standard for Cycle Training - NSI The National Standard for cycle training was reviewed and updated in 2012. This introduction sets the revised National Standard into context and presents the
A Novel Gear-shifting Strategy Used on Smart Bicycles
 2012 International Conference on Industrial and Intelligent Information (ICIII 2012) IPCSIT vol.31 (2012) (2012) IACSIT Press, Singapore A Novel Gear-shifting Strategy Used on Smart Bicycles Tsung-Yin
2012 International Conference on Industrial and Intelligent Information (ICIII 2012) IPCSIT vol.31 (2012) (2012) IACSIT Press, Singapore A Novel Gear-shifting Strategy Used on Smart Bicycles Tsung-Yin
Title: Golfer Specific Responses to Shaft Stiffness: Implications for Optimizing Loft during Driver Fitting
 1 1 2 3 Title: Golfer Specific Responses to Shaft Stiffness: Implications for Optimizing Loft during Driver Fitting 4 5 Running Title: Golfer Specific Responses to Shaft Stiffness 6 7 Authors: Sasho J.
1 1 2 3 Title: Golfer Specific Responses to Shaft Stiffness: Implications for Optimizing Loft during Driver Fitting 4 5 Running Title: Golfer Specific Responses to Shaft Stiffness 6 7 Authors: Sasho J.
Predictive Dynamic Simulation of Seated Start-Up Cycling Using Olympic Cyclist and Bicycle Models
 Proceedings Predictive Dynamic Simulation of Seated Start-Up Cycling Using Olympic Cyclist and Bicycle Models Conor Jansen * and John McPhee Systems Design Engineering, University of Waterloo, Waterloo,
Proceedings Predictive Dynamic Simulation of Seated Start-Up Cycling Using Olympic Cyclist and Bicycle Models Conor Jansen * and John McPhee Systems Design Engineering, University of Waterloo, Waterloo,
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS. For 2020 implementation
 SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS. For 2020 implementation") EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS For 2020 implementation Copyright Euro NCAP 2018 - This work is the intellectual property of Euro NCAP.
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS For 2020 implementation Copyright Euro NCAP 2018 - This work is the intellectual property of Euro NCAP.
Assessment Task for Stage 6 Preliminary Subject: PDHPE Topic: The Body In Motion (Core 2)
") Student s Name: Teacher s Name: Assessment Task for Stage 6 Preliminary Subject: PDHPE Topic: The Body In Motion (Core 2) Assessment Task No. 3 Due Date: Term 3 Week 1 16 th July 2014 Weighting 25% Submission
Student s Name: Teacher s Name: Assessment Task for Stage 6 Preliminary Subject: PDHPE Topic: The Body In Motion (Core 2) Assessment Task No. 3 Due Date: Term 3 Week 1 16 th July 2014 Weighting 25% Submission
AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION
 AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION OMAR AHMAD oahmad@nads-sc.uiowa.edu YIANNIS E. PAPELIS yiannis@nads-sc.uiowa.edu National Advanced Driving
AN AUTONOMOUS DRIVER MODEL FOR THE OVERTAKING MANEUVER FOR USE IN MICROSCOPIC TRAFFIC SIMULATION OMAR AHMAD oahmad@nads-sc.uiowa.edu YIANNIS E. PAPELIS yiannis@nads-sc.uiowa.edu National Advanced Driving
UNDERSTANDING THE TRIP REDUCTION PROGRAM SURVEY ANALYSIS. March 2014 Transportation Coordinator Webinar
 UNDERSTANDING THE TRIP REDUCTION PROGRAM SURVEY ANALYSIS March 2014 Transportation Coordinator Webinar Tech Tips To hear us, turn up speakers or headset volume. Your microphone is muted. Use the controls
UNDERSTANDING THE TRIP REDUCTION PROGRAM SURVEY ANALYSIS March 2014 Transportation Coordinator Webinar Tech Tips To hear us, turn up speakers or headset volume. Your microphone is muted. Use the controls
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Smart Data Role computers play in Technology
 Smart Data Role computers play in Technology October 30 th 2015 Sizzle Video 2016 2 Introduction: Will Phillips INDYCAR Vice President of Technology Daniel Louks INDYCAR Support Engineer Smart Data Role
Smart Data Role computers play in Technology October 30 th 2015 Sizzle Video 2016 2 Introduction: Will Phillips INDYCAR Vice President of Technology Daniel Louks INDYCAR Support Engineer Smart Data Role
Mechanically tested On-going tests on the Magny-Cours track, more than 1500 kms on-track in the past 6 months
 21 st JULY Mygale earned its reputation throughout the world over the last 25 years by designing and handcrafting about 1000 cars, either on behalf of major car manufacturers (Formula BMW, Peugeot Spider,
21 st JULY Mygale earned its reputation throughout the world over the last 25 years by designing and handcrafting about 1000 cars, either on behalf of major car manufacturers (Formula BMW, Peugeot Spider,
Designing a Traffic Circle By David Bosworth For MATH 714
 Designing a Traffic Circle By David Bosworth For MATH 714 Abstract We all have had the experience of sitting in a traffic jam, or we ve seen cars bunched up on a road for some no apparent reason. The use
Designing a Traffic Circle By David Bosworth For MATH 714 Abstract We all have had the experience of sitting in a traffic jam, or we ve seen cars bunched up on a road for some no apparent reason. The use
Real Time Bicycle Simulation Study of Bicyclists Behaviors and their Implication on Safety
 Real Time Bicycle Simulation Study of Bicyclists Behaviors and their Implication on Safety JUNE 30, 2017 Valerian Kwigizile, Jun-Seok Oh, Pavel Ikonomov, Raed Hasan, Cole G. Villalobos, Aous Hammad Kurdi,
Real Time Bicycle Simulation Study of Bicyclists Behaviors and their Implication on Safety JUNE 30, 2017 Valerian Kwigizile, Jun-Seok Oh, Pavel Ikonomov, Raed Hasan, Cole G. Villalobos, Aous Hammad Kurdi,
CYCLING TRACK SALES CONSULTING
 CYCLING TRACK SALES CONSULTING Overview The diversity of events in Cycling Track makes the sport one of the most complex for timekeeping. Quite different timing methods are required for the various types
CYCLING TRACK SALES CONSULTING Overview The diversity of events in Cycling Track makes the sport one of the most complex for timekeeping. Quite different timing methods are required for the various types
3 TRAFFIC CONTROL SIGNAL TIMING AND SYNCHRONIZATION
 Report No. 8 of the Transportation Services Committee Regional Council Meeting of October 20, 2011 3 TRAFFIC CONTROL SIGNAL TIMING AND SYNCHRONIZATION The Transportation Services Committee recommends:
Report No. 8 of the Transportation Services Committee Regional Council Meeting of October 20, 2011 3 TRAFFIC CONTROL SIGNAL TIMING AND SYNCHRONIZATION The Transportation Services Committee recommends:
Question: Bicycles. Vehicle s Static Stability, Part 1. Observations About Bicycles. Vehicle s Static Stability, Part 2
 Bicycles 1 Bicycles 2 Question: Bicycles How would raising the height of a small pickup truck affect its turning stability? 1. Make it less likely to tip over. 2. Make it more likely to tip over. 3. Have
Bicycles 1 Bicycles 2 Question: Bicycles How would raising the height of a small pickup truck affect its turning stability? 1. Make it less likely to tip over. 2. Make it more likely to tip over. 3. Have
Denny Wells, Jacqueline Alderson, Kane Middleton and Cyril Donnelly
 11:45 am-12:00 pm Denny Wells. Assessing the accuracy of inverse kinematics in OpenSim to estimate elbow flexionextension during cricket bowling: Maintaining the rigid linked assumption. (201) ASSESSING
11:45 am-12:00 pm Denny Wells. Assessing the accuracy of inverse kinematics in OpenSim to estimate elbow flexionextension during cricket bowling: Maintaining the rigid linked assumption. (201) ASSESSING
Officiating Broadcast Enhancement Live Production Experiential Digital Coaching
 Officiating Broadcast Enhancement Live Production Experiential Digital Coaching hawkeyeinnovations.com pulselive.com Hawk-Eye in Tennis Hawk-Eye has been an integral part of tennis since 2002 and continues
Officiating Broadcast Enhancement Live Production Experiential Digital Coaching hawkeyeinnovations.com pulselive.com Hawk-Eye in Tennis Hawk-Eye has been an integral part of tennis since 2002 and continues
This is the Quick Start Guide for the Optibike Pioneer Allroad electric bicycle. The Guide provides for basic information required to ride the
 This is the Quick Start Guide for the Optibike Pioneer Allroad electric bicycle. The Guide provides for basic information required to ride the Allroad. It is not intended to be an extensive manual. It
This is the Quick Start Guide for the Optibike Pioneer Allroad electric bicycle. The Guide provides for basic information required to ride the Allroad. It is not intended to be an extensive manual. It
TEN YEARS IN LOCOMOTION CONTROL RESEARCH
 TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
Question: Bicycles. Observations About Bicycles. Static Stability, Part 1. Static Stability, Part 2. Static Stability, Part 3
 Bicycles 1 Bicycles 2 Question: Bicycles How would raising the height of a sport utility vehicle affect its turning stability? 1. Make it less likely to tip over. 2. Make it more likely to tip over. 3.
Bicycles 1 Bicycles 2 Question: Bicycles How would raising the height of a sport utility vehicle affect its turning stability? 1. Make it less likely to tip over. 2. Make it more likely to tip over. 3.
KAIST Interactive Bicycle Simulator
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 KAIST Interactive Bicycle Simulator Dong-Soo Kwon, Gi-Hun Yang, Chong-Won Lee, Jae-Cheol Shin,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 KAIST Interactive Bicycle Simulator Dong-Soo Kwon, Gi-Hun Yang, Chong-Won Lee, Jae-Cheol Shin,
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Club Pro 1 Summary of Course Results Date: Evaluations Prof. Workbooks Practical Exam #1 Practical Exam #2 #1 #2 #3 #4
 Club Pro 1 Summary of Course Results Date: MS Met Standard DNMS Did Not Meet Standard Participant Names 1. NCCP MED Online Evaluations Prof. Workbooks Practical Exam #1 Practical Exam #2 #1 #2 #3 #4 Demonstration
Club Pro 1 Summary of Course Results Date: MS Met Standard DNMS Did Not Meet Standard Participant Names 1. NCCP MED Online Evaluations Prof. Workbooks Practical Exam #1 Practical Exam #2 #1 #2 #3 #4 Demonstration
Optimization of an off-road bicycle with four-bar linkage rear suspension
 Proceedings of MUSME 2008, the International Symposium on Multibody Systems and Mechatronics San Juan (Argentina), 8-12 April 2008 Paper n. 02-MUSME08 Optimization of an off-road bicycle with four-bar
Proceedings of MUSME 2008, the International Symposium on Multibody Systems and Mechatronics San Juan (Argentina), 8-12 April 2008 Paper n. 02-MUSME08 Optimization of an off-road bicycle with four-bar
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF
 GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF Sara Gharabaghli, Rebecca Krogstad, Sara Lynch, Sofia Saavedra, and Tamara Wright California State University, San Marcos, San Marcos,
GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF Sara Gharabaghli, Rebecca Krogstad, Sara Lynch, Sofia Saavedra, and Tamara Wright California State University, San Marcos, San Marcos,
DUMMY Positioning for a Whiplash Load Case Using LS-DYNA Implicit. Andreas Hirth RD/KSB 10 th European LS-DYNA Conference Würzburg
 DUMMY Positioning for a Whiplash Load Case Using LS-DYNA Implicit Andreas Hirth RD/KSB 10 th European LS-DYNA Conference Würzburg 2015-06-16 1 DUMMY Positioning Using LS-DYNA Implicit Authors Andreas Hirth
DUMMY Positioning for a Whiplash Load Case Using LS-DYNA Implicit Andreas Hirth RD/KSB 10 th European LS-DYNA Conference Würzburg 2015-06-16 1 DUMMY Positioning Using LS-DYNA Implicit Authors Andreas Hirth
Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL.
 Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL www.humphree.com WHEN EFFICIENCY AND PERFORMANCE REALLY MATTERS! Humphree proudly presents the new HCS-5 The HCS-5 combines exceptional mechanical
Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL www.humphree.com WHEN EFFICIENCY AND PERFORMANCE REALLY MATTERS! Humphree proudly presents the new HCS-5 The HCS-5 combines exceptional mechanical
Bicycle Collision Analysis Using a Vehicle Driving Simulator MOVIC-T4
 Bicycle Collision Analysis Using a Vehicle Driving Simulator MOVIC-T4 Mio SUZUKI Assistant Professor, Department of Built Environment, Tokyo Institute of Technology, Kanagawa, Japan. E-mail: mios@enveng.titech.ac.jp
Bicycle Collision Analysis Using a Vehicle Driving Simulator MOVIC-T4 Mio SUZUKI Assistant Professor, Department of Built Environment, Tokyo Institute of Technology, Kanagawa, Japan. E-mail: mios@enveng.titech.ac.jp
HAWK-EYE INNOVATIONS LTD THE HAWK-EYE TENNIS COACHING SYSTEM
 HAWK-EYE INNOVATIONS LTD THE HAWK-EYE TENNIS COACHING SYSTEM 1 INTRODUCTION The Hawk-Eye Tennis Coaching System described in this document is the most technologically advanced tennis coaching system in
HAWK-EYE INNOVATIONS LTD THE HAWK-EYE TENNIS COACHING SYSTEM 1 INTRODUCTION The Hawk-Eye Tennis Coaching System described in this document is the most technologically advanced tennis coaching system in
Rollover Warning/Control for Sports Utility Vehicles
 Rollover Warning/Control for Sports Utility Vehicles Bo-Chiuan Chen, GSRA Huei Peng, Associate Prof. Dept. of Mechanical Engineering and Applied Mechanics University of Michigan 1 Outline Introduction
Rollover Warning/Control for Sports Utility Vehicles Bo-Chiuan Chen, GSRA Huei Peng, Associate Prof. Dept. of Mechanical Engineering and Applied Mechanics University of Michigan 1 Outline Introduction
Tour Start! Handbikes for daily use and recreation. Information for users
 Tour Start! Handbikes for daily use and recreation Information for users Learning from the pros Our commitment to sports for the disabled is important to us and we have been supporting the Paralympic Games
Tour Start! Handbikes for daily use and recreation Information for users Learning from the pros Our commitment to sports for the disabled is important to us and we have been supporting the Paralympic Games
Canadian Jurisdictions Conduct Annual International Roadcheck
 Canadian s Conduct Annual International Roadcheck July 7, 2017 This year s annual North American roadside safety inspection blitz International Roadcheck was conducted June 6-8 by enforcement agencies
Canadian s Conduct Annual International Roadcheck July 7, 2017 This year s annual North American roadside safety inspection blitz International Roadcheck was conducted June 6-8 by enforcement agencies
ABSTRACT PATTERNS USING 3D-DYNAMIC MODELING. Kaustav Nandy, Master of Science, Department of Electrical And Computer Engineering
 ABSTRACT Title of Thesis: IDENTIFICATION OF HUMAN WALKING PATTERNS USING 3D-DYNAMIC MODELING Kaustav Nandy, Master of Science, 26 Thesis Directed By: Professor. Rama Chellappa Department of Electrical
ABSTRACT Title of Thesis: IDENTIFICATION OF HUMAN WALKING PATTERNS USING 3D-DYNAMIC MODELING Kaustav Nandy, Master of Science, 26 Thesis Directed By: Professor. Rama Chellappa Department of Electrical
Guidelines for Using the UMTRI ATD Positioning Procedure for ATD and Seat Positioning
 Guidelines for Using the UMTRI ATD Positioning Procedure for ATD and Seat Positioning July 2002 Insurance Institute for Highway Safety Guidelines for Using the UMTRI ATD Positioning Procedure for ATD and
Guidelines for Using the UMTRI ATD Positioning Procedure for ATD and Seat Positioning July 2002 Insurance Institute for Highway Safety Guidelines for Using the UMTRI ATD Positioning Procedure for ATD and
Sample Preparation Outline (Informative)
") Quick Summary Table (Do NOT delete) Topic: Bicycle Safety General Purpose: To inform Sample Preparation Outline (Informative) Statement of Purpose: To inform my audience about bicycle safety Central Idea
Quick Summary Table (Do NOT delete) Topic: Bicycle Safety General Purpose: To inform Sample Preparation Outline (Informative) Statement of Purpose: To inform my audience about bicycle safety Central Idea
Subsonic Wind Tunnel 300 mm
 aerodynamics AF1300 An open circuit suction subsonic wind tunnel with a working section of 300 mm by 300 mm and 600 mm long Screenshot of the optional VDAS software Saves time and money compared to full-scale
aerodynamics AF1300 An open circuit suction subsonic wind tunnel with a working section of 300 mm by 300 mm and 600 mm long Screenshot of the optional VDAS software Saves time and money compared to full-scale
Design and Modeling of a Mobile Robot
 Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Interim Operating Procedures for SonTek RiverSurveyor M9/S5
 Hydroacoustics Technical Working Group: Task 2.3 Fully operationalize auto-adapting ADCPs Interim Operating Procedures for SonTek RiverSurveyor M9/S5 P Campbell, E. Jamieson, F Rainville, A Du Cap, 2014
Hydroacoustics Technical Working Group: Task 2.3 Fully operationalize auto-adapting ADCPs Interim Operating Procedures for SonTek RiverSurveyor M9/S5 P Campbell, E. Jamieson, F Rainville, A Du Cap, 2014
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances
 First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
Three-Dimensional Ray-Cast Pong
 Three-Dimensional Ray-Cast Pong Richard Hughes Elizabeth Power! Overview What is Pong? Traditional Pong is a two-dimensional game that simulates table tennis. The player controls a paddle by moving it
Three-Dimensional Ray-Cast Pong Richard Hughes Elizabeth Power! Overview What is Pong? Traditional Pong is a two-dimensional game that simulates table tennis. The player controls a paddle by moving it