First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances
|
|
|
- Malcolm Allen
- 5 years ago
- Views:
Transcription

1 First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA
2 Table of Contents 2. The ExoTeR Rover: a Triple-Bogie locomotion platform 3. Wheel-Walking concept and implementation 4. Test campaign: Experimental Results : Entrapment In Loose Soil ii. iii. 2 nd Scenario: Gradeability 3 rd Scenario: Lander Egress 11 May 2015 Slide 2






3 Some areas of Mars are difficult to traverse OPPORTUNITY CURIOSITY 2005: 5 weeks immobilized in Purgatory Ripple 2006: 8 sols stuck at Jammerbugt Curiosity's left front wheel, sol 713 SPIRIT August 2014: Rerouting in Hidden Valley after finding slippery sand 2007: 10 sols stuck at Tartarus 2009: permanently lodged at Troy 11 May 2015 Slide 3

4 Russian planetary exploration rover early concepts 11 May 2015 Slide 4

5 ExoTeR rover: a Triple-Bogie platform Triple-Bogie concept conceived in the early phase of the ExoMars mission. - Simple & Performing -> Baseline design with wide acceptation in Europe Deployment actuators of the concept offer the possibility of performing wheel-walking maneuvers. 11 May 2015 Slide 5
 70 x 70 x 40 cm 3 Wheel diameter Wheel width Mass Ground pressure * 14 cm 9 cm 24.08 kg 6.")
6 ExoTeR rover: a Triple-Bogie platform (cont.) Locomotion platform type Lab rover prototype ExoTeR based on the triple-bogie design. Keeps the kinematic properties of ExoMars design (as of 2007). 6 x 4 x 6 Size (L x W x H) 70 x 70 x 40 cm 3 Wheel diameter Wheel width Mass Ground pressure * 14 cm 9 cm kg 6.25 kpa Table Rover general characteristics and dimensions Figure - ExoTeR Rover, 2013 * Ground pressure calculation based on Effective Ground Pressure (EGP) defined in M Heverly et al. Traverse performance characterization for the mars science laboratory rover. Journal of Field Robotics, May 2015 Slide 6

7 Wheel Walking Concept and Implementation Key concepts: Wheel-walking: synchronised actuation of driving and deployment motors. Implementation based on a complete kinematic motion model relating desired body velocities to joint motion commands. Define transformations for kinematic chains ( legs ) from body centre to each contact point. Jacobian matrix maps Cartesian to joint and contact points rates. Joints commanded considering desired body rates and current state of all joints. Different combinations of actuation (by sets of constraints to the Jacobian) lead to different WW gaits. 11 May 2015 Slide 7 Table Implemented wheel-walking gaits (motion patterns) explained
8 Test Campaign OBJECTIVE Test the traversability performance that can be achieved when using wheel-walking locomotion mode compared to normal driving actuation. SCENARIOS Entrapment In Loose Sand Gradeability Lander Egress OUTPUT Provide test results data in qualitative and quantitative form to help assess the usability case of wheel-walking for planetary exploration missions. 11 May 2015 Slide 8



9 Entrapment in loose soil OBJECTIVE Simulate trapped situation from which the rover should try to free itself. No numerical metric is measured in these tests. SETUP 11 May 2015 Slide 9
 RESULTS The rover benefits from WW to quickly unstuck.")
10 Entrapment in loose soil (cont.) RESULTS The rover benefits from WW to quickly unstuck. Standard rolling keeps digging. 11 May 2015 Slide 10



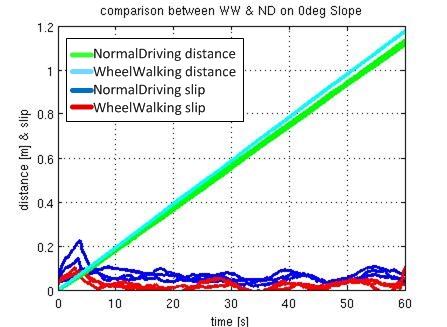
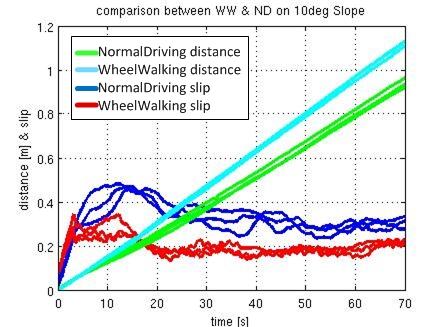
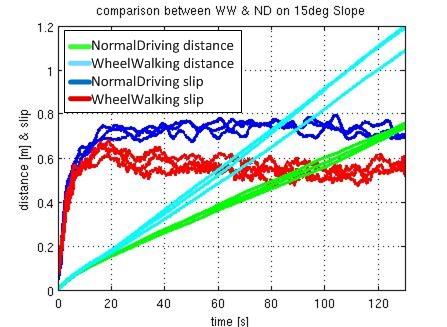
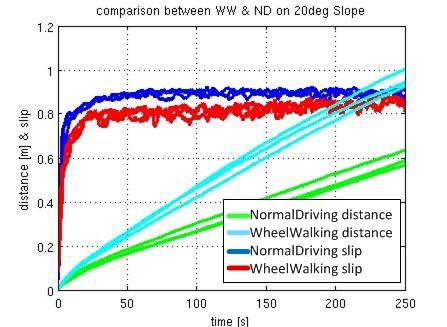
11 Gradeability OBJECTIVE Test the WW performance on slopes, rover system gradeability increased? Metric is the slip-ratio. Accurately measured by Vicon motion tracking: SETUP Repeatable raking procedure Adjustable-slope soil-filled facility. Tested on 0º, 10º, 15º & 20º slopes. Soil type: ES3 with gravel WW gait: syde by syde 11 May 2015 Slide 11
12 Gradeability (cont.) RESULTS Wheel-walking (WW) improves gradeability compared to normal driving (ND) 11 May 2015 Slide 12
13 Gradeability (cont.) Results summary table 11 May 2015 Slide 13



14 Lander Egress OBJECTIVE Experiment on how the "walking" DoF can assist lander egress operations. The metric is to check the dynamic stability at different egress inclinations. SETUP Safety rope hand-held without tension. Step height at the end of the ramps of 8 cm. Cushions at the ground to reduce impact and simulate the flexible wheel behaviour. Proven static stability of the rover > 40º. 11 May 2015 Slide 14
 RESULTS The walking DoF improves dynamic stability in")
15 Lander Egress (cont.) RESULTS The walking DoF improves dynamic stability in egress operations. 11 May 2015 Slide 15
16 Conclusions The wheel-walking locomotion mode outperformed standard rolling in all the tested scenarios. The results shown here demonstrate WW improves traction in loose soil and dynamic stability limit during egress maneuvers and quantify the gradeability increase obtained with respect to ND. Future rover exploration missions, specially in the case of systems with high EGP, could potentially benefit from the increased locomotion capabilities of wheel-walking to mitigate the risk of getting stuck in loose soil, to enable safe egress operations or to simply allow a faster or more efficient navigation by reducing the ground track to straight distance ratio. 11 May 2015 Slide 16
17 Future Work Following the results of these first experiments, Authors have decided to continue this research path and have planned further tests to get more experimental data and increase the confidence in the performance of wheel-walking. Future tests will focus on gradeability analysis to better assess the performance of different wheel-walking gaits in several types of soil. The next testing campaign is planned for March 2015 in the Robotics and Mechatronics Centre (RMC) of DLR Oberpfaenhofen. 11 May 2015 Slide 17
18 Questions? THANK YOU! ACKNOWLEDGEMENTS To all co-authors and TEC-MMA Note: Come see the walking rover at the open lab tour this evening during the conference cocktail! 11 May 2015 Slide 18
19 BackUp Slides 1. ES3 + gravel soil characteristics 2. Gait selection 3. Extra tests: step length variation 4. Extra tests: additional offset speed 5. Extra tests: backwards driving and CoM shifting. 11 May 2015 Slide 19
 80% by mass,")
.")
20 ES3 + gravel soil characteristics Short soil name: ES3-OMR with gravel Full description of this soil: OMR DRY (from Sibelco Ltd, United Kingdom) 80% by mass, with uniformly admixed Hart-splitt gravel, 16% 0-4 mm, 18% 4-8 mm, 15 % 8-11 mm, 21% mm, 30 % mm (from KIBAG Zentrallabor, Switzerland). 11 May 2015 Slide 20
21 Gait selection The final wheel walking gait was selected by criteria of best performance during the dry run day of tests. The best performing gait has been used during the whole test campaign. After the planned test campaign, modifications over this gait were tested attempting to find the configuration parameter that could influence the performance of the overall test. Those are explained in extra tests 11 May 2015 Slide 21
22 Step length variation The step length is the distance the wheel travels from the start at the back until fully extended at the front during one walking maneuver. The following step lengths where used during the tests. Length speed Conclusion: 11 May 2015 Slide 22 1cm cm cm cm cm cm 0.35 NO conclusion can be drawn. No clear trend or relation.
Locomotion Concepts. Autonomous Mobile Robots. Concepts Legged Locomotion Wheeled Locomotion. Autonomous Systems Lab. Zürich. Localization.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Robot motion by simultaneously wheel and leg propulsion
 Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Design and Modeling of a Mobile Robot
 Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Simulation of the Hybtor Robot
 Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
GOLFER. The Golf Putting Robot
 GOLFER The Golf Putting Robot Written By Wing Pan Yuen For EEL 5666 Intelligent Machines Design Laboratory December 05, 1999 Table of Contents Abstract Introduction Executive Summary Integrated System
GOLFER The Golf Putting Robot Written By Wing Pan Yuen For EEL 5666 Intelligent Machines Design Laboratory December 05, 1999 Table of Contents Abstract Introduction Executive Summary Integrated System
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Mecánica de Sistemas Multicuerpo:
 Universidad Pública de Navarra 12 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Mecánica de Sistemas Multicuerpo: Análisis de la Silla de Ruedas Triesférica y Dinámica
Universidad Pública de Navarra 12 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Mecánica de Sistemas Multicuerpo: Análisis de la Silla de Ruedas Triesférica y Dinámica
ESAIL D3.1.1 Requirement specifications of the tether test reels
 D3.1.1 Requirement specifications of the tether test reels Work Package: WP 3.1 Version: Version 1.0 Prepared by: DLR German Aerospace Center, Olaf Krömer, Roland Rosta Time: Bremen, May 30 th, 2011 Coordinating
D3.1.1 Requirement specifications of the tether test reels Work Package: WP 3.1 Version: Version 1.0 Prepared by: DLR German Aerospace Center, Olaf Krömer, Roland Rosta Time: Bremen, May 30 th, 2011 Coordinating
This course will deal with Locomotion and Navigation that includes:
 1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Using sensory feedback to improve locomotion performance of the salamander robot in different environments
 Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
SIMON Simulation of Non-Automotive Vehicle Free Rolling Response
 SIMON Simulation of Non-Automotive Vehicle Free Rolling Response Ciro Ramirez, PhD, PE, CSHO, C. L. Long, Jr., P.E., and R. Joe Thornhill, PhD, PE, CSHO Thornhill, Ramirez & Associates, Inc. Copyright
SIMON Simulation of Non-Automotive Vehicle Free Rolling Response Ciro Ramirez, PhD, PE, CSHO, C. L. Long, Jr., P.E., and R. Joe Thornhill, PhD, PE, CSHO Thornhill, Ramirez & Associates, Inc. Copyright
Gait Analysis of a Little Biped Robot. Received May 2015; accepted July 2015
 ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
the world s most advanced humanoid robot
 the world s most advanced humanoid robot 02 : ASIMO V2 : TECHNICAL GUIDE : ROBOT DEVELOPMENT : CONTENTS ROBOT DEVELOPMENT 3 HISTORY OF HUMANOIDS 5 ASIMO v1 7 ASIMO v2 16 THE FUTURE 18 Creating New Mobility
the world s most advanced humanoid robot 02 : ASIMO V2 : TECHNICAL GUIDE : ROBOT DEVELOPMENT : CONTENTS ROBOT DEVELOPMENT 3 HISTORY OF HUMANOIDS 5 ASIMO v1 7 ASIMO v2 16 THE FUTURE 18 Creating New Mobility
Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
In this course you will learn the following
 Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Design of a double quadruped for the Tech United soccer robot
 Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Gaits and Locomotion MARYLAND. Metabolic Energy Locomotion Gaits U N I V E R S I T Y O F. Gaits and Locomotion
 Metabolic Energy Locomotion Gaits 1 2013 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Metabolic Costs of Physical Exertion from Roth, Bioenergetics of Space Suits for Lunar Exploration,
Metabolic Energy Locomotion Gaits 1 2013 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Metabolic Costs of Physical Exertion from Roth, Bioenergetics of Space Suits for Lunar Exploration,
Your web browser (Safari 7) is out of date. For more security, comfort and. the best experience on this site: Update your browser Ignore
 is out of date. For more security, comfort and. the best experience on this site: Update your browser Ignore") Your web browser (Safari 7) is out of date. For more security, comfort and Activityengage the best experience on this site: Update your browser Ignore Gearing Up with Robots How are gears used to change
Your web browser (Safari 7) is out of date. For more security, comfort and Activityengage the best experience on this site: Update your browser Ignore Gearing Up with Robots How are gears used to change
Decentralized Autonomous Control of a Myriapod Locomotion Robot
 Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell
 IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell Sasakawa International Center for Space Architecture (SICSA), University of Houston, USA e-mail: lbell@uh.edu
IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell Sasakawa International Center for Space Architecture (SICSA), University of Houston, USA e-mail: lbell@uh.edu
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2
 Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Robots With Legs. Helge Wrede
 Robots With Legs Helge Wrede 27.11.2017 Outline Motivation Overview Properties Number of legs Balance Walking Basic Bipedal Implementation Dynamic Balancing Concepts 3D-LIPM 2 Motivation Figure: Side view
Robots With Legs Helge Wrede 27.11.2017 Outline Motivation Overview Properties Number of legs Balance Walking Basic Bipedal Implementation Dynamic Balancing Concepts 3D-LIPM 2 Motivation Figure: Side view
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
METNET Mission for Mars. MetNet. Atmospheric science network for Mars
 MetNet Atmospheric science network for Mars A.-M. Harri (1), R. Pellinen (1), V. Linkin (2), K. Pichkadze (3), M. Uspensky (1), T. Siili (1), A. Lipatov (2), H. Savijärvi (4), V. Vorontsov (3), J.Semenov
MetNet Atmospheric science network for Mars A.-M. Harri (1), R. Pellinen (1), V. Linkin (2), K. Pichkadze (3), M. Uspensky (1), T. Siili (1), A. Lipatov (2), H. Savijärvi (4), V. Vorontsov (3), J.Semenov
Equilibrium. Observations
 Equilibrium Observations When you look closely at a rope you will see that it consists of several strands of twine. If you tried to hang a heavy (or massive) object on a single strand of twine it would
Equilibrium Observations When you look closely at a rope you will see that it consists of several strands of twine. If you tried to hang a heavy (or massive) object on a single strand of twine it would
Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site
 Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site Prof. Richard Voyles Guangying Jiang Purdue University Collaborative Robotics Lab Purdue Robotics Accelerator U.S. DOE
Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site Prof. Richard Voyles Guangying Jiang Purdue University Collaborative Robotics Lab Purdue Robotics Accelerator U.S. DOE
Tether-based Robot Locomotion Experiments in REX-J mission
 Tether-based Robot Locomotion Experiments in REX-J mission H. Nakanishi*, M. Yamazumi*, S. Karakama*, M. Oda*, S. Nishida****, H. Kato**, K. Watanabe*, A. Ueta**, M. Yoshii***, S. Suzuki*** *Tokyo Institute
Tether-based Robot Locomotion Experiments in REX-J mission H. Nakanishi*, M. Yamazumi*, S. Karakama*, M. Oda*, S. Nishida****, H. Kato**, K. Watanabe*, A. Ueta**, M. Yoshii***, S. Suzuki*** *Tokyo Institute
Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and its step climbing strategy
 Munakata and Wada ROBOMECH Journal (2015) 2:7 DOI 10.1186/s40648-015-0028-9 RESEARCH ARTICLE Open Access Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and
Munakata and Wada ROBOMECH Journal (2015) 2:7 DOI 10.1186/s40648-015-0028-9 RESEARCH ARTICLE Open Access Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and
Programmable Valves Enable Both Precision Motion Control and Energy Saving
 Programmable Valves Enable Both Precision Motion Control and Energy Saving Dr. Bin Yao Purdue University West Lafayette, IN 47907, USA 1 Outline Development of Programmable Valves Control of Programmable
Programmable Valves Enable Both Precision Motion Control and Energy Saving Dr. Bin Yao Purdue University West Lafayette, IN 47907, USA 1 Outline Development of Programmable Valves Control of Programmable
Gait Sequence generation of a Hybrid Wheeled-Legged Robot for negotiating discontinuous terrain
 1 Gait Sequence generation of a Hybrid Wheeled-Legged Robot for negotiating discontinuous terrain Sartaj Singh, K Madhava Krishna Abstract-- In this paper we develop an algorithm to generate gait sequences
1 Gait Sequence generation of a Hybrid Wheeled-Legged Robot for negotiating discontinuous terrain Sartaj Singh, K Madhava Krishna Abstract-- In this paper we develop an algorithm to generate gait sequences
Chain Drives ELEMEN MESIN II
 Chain Drives ELEMEN MESIN II Introduction Belt and rope drives slipping may occur To avoid slipping Chains The chains are made up of number of rigid links which are hinged together by pin joints in order
Chain Drives ELEMEN MESIN II Introduction Belt and rope drives slipping may occur To avoid slipping Chains The chains are made up of number of rigid links which are hinged together by pin joints in order
Skippy: Reaching for the Performance Envelope
 Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Proof of concept of a Bio-Containment System for Mars Sample Return Mission
 Proof of concept of a Bio-Containment System for Mars Sample Return Mission S. Senese (I), P. Magnani (I), A. Fumagalli (I), M. Colomba (I) A. Pedrini (II), D. Indrigo (II), A. Terribile (II), R. Ferrario
Proof of concept of a Bio-Containment System for Mars Sample Return Mission S. Senese (I), P. Magnani (I), A. Fumagalli (I), M. Colomba (I) A. Pedrini (II), D. Indrigo (II), A. Terribile (II), R. Ferrario
FUGITIVE EMISSIONS EXPERIMENTAL MEASUREMENTS AND EQUIVALENCY
 FUGITIVE EMISSIONS EXPERIMENTAL MEASUREMENTS AND EQUIVALENCY ABSTRACT Jay Abrahimzadeh Joe Steinke Control Components Inc. Fugitive Emissions requirements, compliance, and use have gained momentum in the
FUGITIVE EMISSIONS EXPERIMENTAL MEASUREMENTS AND EQUIVALENCY ABSTRACT Jay Abrahimzadeh Joe Steinke Control Components Inc. Fugitive Emissions requirements, compliance, and use have gained momentum in the
Keywords--Bio-Robots, Walking Robots, Locomotion and Stability Controlled Gait.
 Six Legged Locomotion on Uneven Terrain Kale Aparna S., Salunke Geeta D. kaleaparna5@gmail.com, geetasalunke@gmail.com Abstract -In this paper current state of many walking robots are compared and advantages
Six Legged Locomotion on Uneven Terrain Kale Aparna S., Salunke Geeta D. kaleaparna5@gmail.com, geetasalunke@gmail.com Abstract -In this paper current state of many walking robots are compared and advantages
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Short Rope Tests. Alpine Recreation & Lincoln University Outdoor Leadership course
 Short Rope Tests Gottlieb Braun-Elwert Alpine Recreation & Lincoln University Outdoor Leadership course Objective: Measure the probability of a guide s ability to hold a fall using different short-roping
Short Rope Tests Gottlieb Braun-Elwert Alpine Recreation & Lincoln University Outdoor Leadership course Objective: Measure the probability of a guide s ability to hold a fall using different short-roping
Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II.
 Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II Giuseppe Callea BhaiTech Technology BhaiTech Technology 1 Company Presentation Brief Recall
Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II Giuseppe Callea BhaiTech Technology BhaiTech Technology 1 Company Presentation Brief Recall
Introduction to Robotics for 3D Additive Construction
 Introduction to Robotics for 3D Additive Construction Brian Wilcox, Manager, Space Robotics Technology Jet Propulsion Laboratory, California Institute of Technology 24 Aug 20105 Robotics for 3D Additive
Introduction to Robotics for 3D Additive Construction Brian Wilcox, Manager, Space Robotics Technology Jet Propulsion Laboratory, California Institute of Technology 24 Aug 20105 Robotics for 3D Additive
Verification and Validation Pathfinder Release 0730 x64
 403 Poyntz Avenue, Suite B Manhattan, KS 66502 USA +1.785.770.8511 www.thunderheadeng.com Verification and Validation Pathfinder 2014.2 Release 0730 x64 Disclaimer Thunderhead Engineering makes no warranty,
403 Poyntz Avenue, Suite B Manhattan, KS 66502 USA +1.785.770.8511 www.thunderheadeng.com Verification and Validation Pathfinder 2014.2 Release 0730 x64 Disclaimer Thunderhead Engineering makes no warranty,
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud. Hydraulically Actuated Hexapod Robots. Design, Implementation. and Control.
 Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
SPH 4C Unit 4 Hydraulics and Pneumatic Systems
 SPH 4C Unit 4 Hydraulics and Pneumatic Systems Properties of Fluids and Pressure Learning Goal: I can explain the properties of fluids and identify associated units. Definitions: Fluid: A substance that
SPH 4C Unit 4 Hydraulics and Pneumatic Systems Properties of Fluids and Pressure Learning Goal: I can explain the properties of fluids and identify associated units. Definitions: Fluid: A substance that
MANUFACTURE OF SUBSTRUCTURE BY AUTOMATED FIBER PLACEMENT
 MANUFACTURE OF SUBSTRUCTURE BY AUTOMATED FIBER PLACEMENT Trevor S. Angell Spirit AeroSystems 3365 S. Oliver St. Wichita, KS 67278 Todd Rudberg Electroimpact 4413 Chennault Beach Rd. Mukilteo, WA 98275
MANUFACTURE OF SUBSTRUCTURE BY AUTOMATED FIBER PLACEMENT Trevor S. Angell Spirit AeroSystems 3365 S. Oliver St. Wichita, KS 67278 Todd Rudberg Electroimpact 4413 Chennault Beach Rd. Mukilteo, WA 98275
WHEELCHAIR SKILLS PROGRAM (WSP) 4.1 OBSTACLE COURSE GUIDELINES
 4.1 OBSTACLE COURSE GUIDELINES") WHEELCHAIR SKILLS PROGRAM (WSP) 4.1 OBSTACLE COURSE GUIDELINES WSP 4.1 assessment and training activities can take place in any environment, because the obstacles are based on common ones found in hospitals,
WHEELCHAIR SKILLS PROGRAM (WSP) 4.1 OBSTACLE COURSE GUIDELINES WSP 4.1 assessment and training activities can take place in any environment, because the obstacles are based on common ones found in hospitals,
Flow transients in multiphase pipelines
 Flow transients in multiphase pipelines David Wiszniewski School of Mechanical Engineering, University of Western Australia Prof. Ole Jørgen Nydal Multiphase Flow Laboratory, Norwegian University of Science
Flow transients in multiphase pipelines David Wiszniewski School of Mechanical Engineering, University of Western Australia Prof. Ole Jørgen Nydal Multiphase Flow Laboratory, Norwegian University of Science
REAL. Simple, Intuitive, Powerful Real.
 REAL Simple, Intuitive, Powerful Real. When we set out to define the bikefitting.com toolset engineered by Shimano Dynamics Lab, these were a few of the stand out priorities we wanted to achieve. We delivered.
REAL Simple, Intuitive, Powerful Real. When we set out to define the bikefitting.com toolset engineered by Shimano Dynamics Lab, these were a few of the stand out priorities we wanted to achieve. We delivered.
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
Learning Locomotion Test 3.2 Results
 Learning Locomotion Test 3.2 Results TABLE OF CONTENTS 1 INTRODUCTION... 2 2 TEST METHODS... 2 2.1 TEST COURSES... 2 2.2 COMMUNICATIONS... 3 2.3 APPLICABLE DOCUMENTS... 3 3 RESULTS: TYPE A TESTS... 4 3.1
Learning Locomotion Test 3.2 Results TABLE OF CONTENTS 1 INTRODUCTION... 2 2 TEST METHODS... 2 2.1 TEST COURSES... 2 2.2 COMMUNICATIONS... 3 2.3 APPLICABLE DOCUMENTS... 3 3 RESULTS: TYPE A TESTS... 4 3.1
Procedia Engineering Procedia Engineering 2 (2010)
") Available online at www.sciencedirect.com Procedia Engineering Procedia Engineering 2 (2010) 002681 2686 (2009) 000 000 Procedia Engineering www.elsevier.com/locate/procedia 8 th Conference of the International
Available online at www.sciencedirect.com Procedia Engineering Procedia Engineering 2 (2010) 002681 2686 (2009) 000 000 Procedia Engineering www.elsevier.com/locate/procedia 8 th Conference of the International
EXPERIMENTAL INVESTIGATIONS OF BARGE FLOATER WITH MOONPOOL FOR 5 MW WIND TURBINE
 EXPERIMENTAL INVESTIGATIONS OF BARGE FLOATER WITH MOONPOOL FOR 5 MW WIND TURBINE 1 MR. G.VIJAYA KUMAR, 2 DR. R. PANNEER SELVAM 1 M.S. Research Scholar, Department of Ocean Engineering, IIT Madras, Chennai,
EXPERIMENTAL INVESTIGATIONS OF BARGE FLOATER WITH MOONPOOL FOR 5 MW WIND TURBINE 1 MR. G.VIJAYA KUMAR, 2 DR. R. PANNEER SELVAM 1 M.S. Research Scholar, Department of Ocean Engineering, IIT Madras, Chennai,
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Lifecycle Performance of Escape Systems
 Lifecycle Performance of Escape Systems A look at laboratory vs field conditioning of aramid fiber based escape systems. By James Hunter, Cedric Smith, Ole Kils and Tyler Mayer for ITRS 2018 1.1 Introduction
Lifecycle Performance of Escape Systems A look at laboratory vs field conditioning of aramid fiber based escape systems. By James Hunter, Cedric Smith, Ole Kils and Tyler Mayer for ITRS 2018 1.1 Introduction
The Mars Science Laboratory Flight Software A Platform for Science and Mobility
 The Mars Science Laboratory Flight Software A Platform for Science and Mobility Dr. Kathryn Anne Weiss, MSL FSW Jet Propulsion Laboratory, California Institute of Technology 2012 California Institute of
The Mars Science Laboratory Flight Software A Platform for Science and Mobility Dr. Kathryn Anne Weiss, MSL FSW Jet Propulsion Laboratory, California Institute of Technology 2012 California Institute of
Testing Readiness Review March 3, 2014
 Testing Readiness Review March 3, 2014 Ben Azlein, Chris Bennett, Kara Bongiovanni, Eric Brenner, Lea Harris, Austin Kootz, Stephanie Oij, Jason Schelz Customer: Barbara Streiffert, JPL PAB Advisor: Dr.
Testing Readiness Review March 3, 2014 Ben Azlein, Chris Bennett, Kara Bongiovanni, Eric Brenner, Lea Harris, Austin Kootz, Stephanie Oij, Jason Schelz Customer: Barbara Streiffert, JPL PAB Advisor: Dr.
Fish Biorobotics. Fishes as model systems for understanding aquatic propulsion. George V. Lauder Harvard University
 Fish Biorobotics Fishes as model systems for understanding aquatic propulsion 28,000 species of fishes Half of all vertebrates are fishes Fishes are 550 million years old Tremendous opportunity for selection
Fish Biorobotics Fishes as model systems for understanding aquatic propulsion 28,000 species of fishes Half of all vertebrates are fishes Fishes are 550 million years old Tremendous opportunity for selection
Simulation-based design to reduce metabolic cost
 Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
Spider Robot for Motion with Quasistatic. Force Constraints
 Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
FIXINGS USED FOR SHELTERS MADE FROM FLEXIBLE FABRICS ROPE TENSIONERS
 FIXINGS USED FOR SHELTERS MADE FROM FLEXIBLE FABRICS ROPE TENSIONERS a guideline on fixings used for shelters made from flexible fabrics and rope tensioners Authors TESTING FIXINGS USED FOR SHELTERS MADE
FIXINGS USED FOR SHELTERS MADE FROM FLEXIBLE FABRICS ROPE TENSIONERS a guideline on fixings used for shelters made from flexible fabrics and rope tensioners Authors TESTING FIXINGS USED FOR SHELTERS MADE
EXPERIMENTAL MEASUREMENT OF THE WASH CHARACTERISTICS OF A FAST DISPLACEMENT CATAMARAN IN DEEP WATER
 EXPERIMENTAL MEASUREMENT OF THE WASH CHARACTERISTICS OF A FAST DISPLACEMENT CATAMARAN IN DEEP WATER A.F. Molland, P.A. Wilson and D.J. Taunton Ship Science Report No. 124 University of Southampton December
EXPERIMENTAL MEASUREMENT OF THE WASH CHARACTERISTICS OF A FAST DISPLACEMENT CATAMARAN IN DEEP WATER A.F. Molland, P.A. Wilson and D.J. Taunton Ship Science Report No. 124 University of Southampton December
Mechanical System Simulation of the XM307 Advanced Crew Served Weapon
 National Defense Industrial Association Joint Services Small Arms Systems Annual Symposium May 7-10 2007 Mechanical System Simulation of the XM307 Advanced Crew Served Weapon Presenter: Callista Rodriguez
National Defense Industrial Association Joint Services Small Arms Systems Annual Symposium May 7-10 2007 Mechanical System Simulation of the XM307 Advanced Crew Served Weapon Presenter: Callista Rodriguez
Programming Self-Recovery in the humanoid Leong Ti Xean 1 Yap Kian Tiong 2
 Programming Self-Recovery in the humanoid Leong Ti Xean 1 Yap Kian Tiong 2 1. INTRODUCTION 1.1 Background In October 2000, Honda announced the ASIMO humanoid robot, capable of interpreting the postures
Programming Self-Recovery in the humanoid Leong Ti Xean 1 Yap Kian Tiong 2 1. INTRODUCTION 1.1 Background In October 2000, Honda announced the ASIMO humanoid robot, capable of interpreting the postures
Trajectory Planning and Motion Simulation for a Hydraulic Actuated Biped Robot
 Research Journal of Applied Sciences, Engineering and Technology 5(0): 3004-3009, 203 ISSN: 2040-7459; e-issn: 2040-7467 Maxwell Scientific Organization, 203 Submitted: September 6, 202 Accepted: November
Research Journal of Applied Sciences, Engineering and Technology 5(0): 3004-3009, 203 ISSN: 2040-7459; e-issn: 2040-7467 Maxwell Scientific Organization, 203 Submitted: September 6, 202 Accepted: November
LaserSnake Underwater Laser Cutting Phase 1 TWI
 LaserSnake2 110128 Underwater Laser Cutting Phase 1 TWI-002 6-13 Contents 1 Introduction 1 2 Objectives 1 3 Underwater Cutting Nozzle Design and Operation 1 3.1 Design 1 3.2 Dry-zone testing 3 4 Equipment
LaserSnake2 110128 Underwater Laser Cutting Phase 1 TWI-002 6-13 Contents 1 Introduction 1 2 Objectives 1 3 Underwater Cutting Nozzle Design and Operation 1 3.1 Design 1 3.2 Dry-zone testing 3 4 Equipment
Verification and Validation Pathfinder
 403 Poyntz Avenue, Suite B Manhattan, KS 66502 USA +1.785.770.8511 www.thunderheadeng.com Verification and Validation Pathfinder 2015.1 Release 0504 x64 Disclaimer Thunderhead Engineering makes no warranty,
403 Poyntz Avenue, Suite B Manhattan, KS 66502 USA +1.785.770.8511 www.thunderheadeng.com Verification and Validation Pathfinder 2015.1 Release 0504 x64 Disclaimer Thunderhead Engineering makes no warranty,
Circular Motion - Horizontal
 Circular Motion - Horizontal Outcome(s): explain and apply the concepts of centripetal acceleration and centripetal force, as applied to uniform horizontal circular motion. A bucket being swung around
Circular Motion - Horizontal Outcome(s): explain and apply the concepts of centripetal acceleration and centripetal force, as applied to uniform horizontal circular motion. A bucket being swung around
Exploration of design solutions for the enhancement of crowd safety
 Australasian Transport Research Forum 2011 Proceedings 28-30 September 2011, Adelaide, Australia Publication website: http://www.patrec.org/atrf.aspx Exploration of design solutions for the enhancement
Australasian Transport Research Forum 2011 Proceedings 28-30 September 2011, Adelaide, Australia Publication website: http://www.patrec.org/atrf.aspx Exploration of design solutions for the enhancement
Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis.
 Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis. D.Moser, N.Stech, J.McCarthy, G.Harris, S.Zahedi, A.McDougall Summary This study reports
Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis. D.Moser, N.Stech, J.McCarthy, G.Harris, S.Zahedi, A.McDougall Summary This study reports
The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women
 The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women *Guha Thakurta A, Iqbal R and De A National Institute of Industrial Engineering, Powai, Vihar Lake, Mumbai-400087, India,
The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women *Guha Thakurta A, Iqbal R and De A National Institute of Industrial Engineering, Powai, Vihar Lake, Mumbai-400087, India,
ABSTRACT 1 INTRODUCTION
 Iterative Product Engineering: Evolutionary Robot Design Dominic. R. Frutiger 1, Josh C. Bongard 2, Fumiya Iida 2 1 Centre of Product Engineering, Swiss Federal Institute of Technology, Zürich, Switzerland
Iterative Product Engineering: Evolutionary Robot Design Dominic. R. Frutiger 1, Josh C. Bongard 2, Fumiya Iida 2 1 Centre of Product Engineering, Swiss Federal Institute of Technology, Zürich, Switzerland
ACCURATE PRESSURE MEASUREMENT FOR STEAM TURBINE PERFORMANCE TESTING
 ACCURATE PRESSURE MEASUREMENT FOR STEAM TURBINE PERFORMANCE TESTING Blair Chalpin Charles A. Matthews Mechanical Design Engineer Product Support Manager Scanivalve Corp Scanivalve Corp Liberty Lake, WA
ACCURATE PRESSURE MEASUREMENT FOR STEAM TURBINE PERFORMANCE TESTING Blair Chalpin Charles A. Matthews Mechanical Design Engineer Product Support Manager Scanivalve Corp Scanivalve Corp Liberty Lake, WA
2016 International Perforating Symposium May Galveston, Texas
 IMESAFR - QRA Tool Perforating Gun Safety Analysis 2016 International Perforating Symposium May 9-11 - Galveston, Texas Who is the Institute of Makers of Explosives? Safety and Security Association for
IMESAFR - QRA Tool Perforating Gun Safety Analysis 2016 International Perforating Symposium May 9-11 - Galveston, Texas Who is the Institute of Makers of Explosives? Safety and Security Association for
Subject: Progress Report CLIN 0001AB, SBIR Topic No. N Legged Vehicle for Underwater Mobile Operations
 FAX. 617-740-20C5 ptwx 710-348-6932 TEL. 617-749-4800 Massa Products Corporation' 280 Lincoln Street, Hingham. MA 02043-1796 VIA CERTIFIED MAIL RETURN RECEIPT REQUESTED, REPLY REFER TO September 15, 1994
FAX. 617-740-20C5 ptwx 710-348-6932 TEL. 617-749-4800 Massa Products Corporation' 280 Lincoln Street, Hingham. MA 02043-1796 VIA CERTIFIED MAIL RETURN RECEIPT REQUESTED, REPLY REFER TO September 15, 1994
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg. Abstract
 Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
FROM CHINESPORT S GENERAL CATALOGUE 2015 EDITION
 Shower Parallel Bars trolleys and FROM CHINESPORT S Exercise GENERAL CATALOGUE Staircases 2015 EDITION FROM CHINESPORT S GENERAL CATALOGUE 2015 EDITION Chinesport thanks all collaborators who have given
Shower Parallel Bars trolleys and FROM CHINESPORT S Exercise GENERAL CATALOGUE Staircases 2015 EDITION FROM CHINESPORT S GENERAL CATALOGUE 2015 EDITION Chinesport thanks all collaborators who have given
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS
 SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS") www.euroncap.com EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS Version 1.0a December 2004 Sled Test Procedure for Assessing Knee Impact Areas (V1.0a)
www.euroncap.com EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) SLED TEST PROCEDURE FOR ASSESSING KNEE IMPACT AREAS Version 1.0a December 2004 Sled Test Procedure for Assessing Knee Impact Areas (V1.0a)
ZIGZAG Experience. Important / remember. Failure to heed any of these warnings may result in severe injury or death.
 A. Childeric / Copalme ZIGZAG Experience This "Product Experience" document is a supplement to the Instructions For Use, which provides feedback from field experience and tips for using your product It
A. Childeric / Copalme ZIGZAG Experience This "Product Experience" document is a supplement to the Instructions For Use, which provides feedback from field experience and tips for using your product It
BIPED TRANSFORMER. Group No. 9
 BIPED TRANSFORMER Group No. 9 Name Roll Number Aditya Vikram Singh 11010305 Dhiraj Gandhi 11010321 Jagjeet Singh 11010326 Mayank Sanghani 11010336 Sriram Kumar 11010365 Vikas Singh 11010371 Abstract: This
BIPED TRANSFORMER Group No. 9 Name Roll Number Aditya Vikram Singh 11010305 Dhiraj Gandhi 11010321 Jagjeet Singh 11010326 Mayank Sanghani 11010336 Sriram Kumar 11010365 Vikas Singh 11010371 Abstract: This
2MW baseline wind turbine: model development and verification (WP1) The University of Tokyo & Hitachi, Ltd.
 The University of Tokyo & Hitachi, Ltd.") 2MW baseline wind turbine: model development and verification (WP1) The University of Tokyo & Hitachi, Ltd. Downwind turbine technology, IEA Wind Task 40 First Progress Meeting, Tokyo, Japan 11 Dec, 2017
2MW baseline wind turbine: model development and verification (WP1) The University of Tokyo & Hitachi, Ltd. Downwind turbine technology, IEA Wind Task 40 First Progress Meeting, Tokyo, Japan 11 Dec, 2017
Gas Gathering System Modeling The Pipeline Pressure Loss Match
 PETROLEUM SOCIETY CANADIAN INSTITUTE OF MINING, METALLURGY & PETROLEUM PAPER 2005-230 Gas Gathering System Modeling The Pipeline Pressure Loss Match R.G. MCNEIL, P.ENG. Fekete Associates Inc. D.R. LILLICO,
PETROLEUM SOCIETY CANADIAN INSTITUTE OF MINING, METALLURGY & PETROLEUM PAPER 2005-230 Gas Gathering System Modeling The Pipeline Pressure Loss Match R.G. MCNEIL, P.ENG. Fekete Associates Inc. D.R. LILLICO,
Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists
 Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists What is VENTURER? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate
Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists What is VENTURER? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate
BUILDING A BETTER PASSIVE WALKER
 BUILDING A BETTER PASSIVE WALKER Abstract - A passive dynamic walker is a mechanism which uses gravitational energy to walk down an incline with a periodic gait. Simple passive dynamic walkers have an
BUILDING A BETTER PASSIVE WALKER Abstract - A passive dynamic walker is a mechanism which uses gravitational energy to walk down an incline with a periodic gait. Simple passive dynamic walkers have an
Analysis of Foot Pressure Variation with Change in Stride Length
 IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-853, p-issn: 2279-861.Volume 13, Issue 1 Ver. IV (Oct. 214), PP 46-51 Dr. Charudatta V. Shinde, M.S. MCh ( Orthopaedics ), Dr. Weijie
IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-853, p-issn: 2279-861.Volume 13, Issue 1 Ver. IV (Oct. 214), PP 46-51 Dr. Charudatta V. Shinde, M.S. MCh ( Orthopaedics ), Dr. Weijie
OIL AND GAS INDUSTRY
 This case study discusses the sizing of a coalescer filter and demonstrates its fouling life cycle analysis using a Flownex model which implements two new pressure loss components: - A rated pressure loss
This case study discusses the sizing of a coalescer filter and demonstrates its fouling life cycle analysis using a Flownex model which implements two new pressure loss components: - A rated pressure loss
The Usage of Propeller Tunnels For Higher Efficiency and Lower Vibration. M. Burak Şamşul
 The Usage of Propeller Tunnels For Higher Efficiency and Lower Vibration M. Burak Şamşul ITU AYOC 2014 - Milper Pervane Teknolojileri Company Profile MILPER is established in 2011 as a Research and Development
The Usage of Propeller Tunnels For Higher Efficiency and Lower Vibration M. Burak Şamşul ITU AYOC 2014 - Milper Pervane Teknolojileri Company Profile MILPER is established in 2011 as a Research and Development
Gyro-Control of a Solar Sailing Satellite
 Gyro-Control of a Solar Sailing Satellite By Hendrik W. JORDAAN 1) and Willem H. STEYN 1) 1) Electric and Electronic Engineering Department, Stellenbosch University, Stellenbosch, South Africa (Received
Gyro-Control of a Solar Sailing Satellite By Hendrik W. JORDAAN 1) and Willem H. STEYN 1) 1) Electric and Electronic Engineering Department, Stellenbosch University, Stellenbosch, South Africa (Received
Designing and calculating for flexible Horizontal Lifelines based on design code CSA Z By HOE Yee Pin and Dr. GOH Yang Miang
 Designing and calculating for flexible Horizontal Lifelines based on design code CSA Z259.16 By HOE Yee Pin and Dr. GOH Yang Miang Introduction This article uses two worked examples to illustrate the fundamental
Designing and calculating for flexible Horizontal Lifelines based on design code CSA Z259.16 By HOE Yee Pin and Dr. GOH Yang Miang Introduction This article uses two worked examples to illustrate the fundamental
Walking with coffee: when and why coffee spills
 Walking with coffee: when and why coffee spills Hans C. Mayer and Rouslan Krechetnikov Department of Mechanical Engineering University of California at Santa Barbara February 20-24, 2012 Page 1/25 Motivation
Walking with coffee: when and why coffee spills Hans C. Mayer and Rouslan Krechetnikov Department of Mechanical Engineering University of California at Santa Barbara February 20-24, 2012 Page 1/25 Motivation
TEN YEARS IN LOCOMOTION CONTROL RESEARCH
 TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
MODELLING OF FUME EXTRACTORS C. R.
 LD8 19th International Symposium of Ballistics, 7 11 May 21, Interlaken, Switzerland MODELLING OF FUME EXTRACTORS C. R. Woodley WS4 Guns and Warheads Department, Defence Evaluation and Research Agency,
LD8 19th International Symposium of Ballistics, 7 11 May 21, Interlaken, Switzerland MODELLING OF FUME EXTRACTORS C. R. Woodley WS4 Guns and Warheads Department, Defence Evaluation and Research Agency,
Wave Transmission Testing of the Martin Ecosystems BioHaven Floating Breakwater
 Wave Transmission Testing of the Martin Ecosystems BioHaven Floating Breakwater March 14, 2014 Submitted by: Bret M. Webb, Ph.D., P.E. Assistant Professor Department of Civil Engineering University of
Wave Transmission Testing of the Martin Ecosystems BioHaven Floating Breakwater March 14, 2014 Submitted by: Bret M. Webb, Ph.D., P.E. Assistant Professor Department of Civil Engineering University of