The Secrets of Robot Football
|
|
|
- Douglas Beasley
- 5 years ago
- Views:
Transcription

1 The Secrets of Robot Football Joerg C. Wolf Centre for Robotics and Intelligent Systems Joerg.wolf-a-t-plymouth.ac.uk University of Plymouth Drake Circus Plymouth PL4 8AA U.K. 1
2 Seminar: The Secrets of Robot Football Dr Joerg Wolf, Friday 14 Nov 2008, 1.30pm 2.30pm, Room SMB204 The University of Plymouth has a track record of developing robot football systems for the last 11 years. By reviewing this development we may be able to predict how future robotic football players will look like and how this will influence the future of robotics research. This seminar will show how robot football systems work in detail. How are these little robots detected by the camera? How do you control the robot s position? Over the years many spin-off student projects have been completed that have used robot football algorithms and circuits. There may be something useful in it for your project.
3 Topics Part 1: Robot Football Introduction Hardware Communication Vision System Strategy Introduction Robot Control Advanced Strategy Methods Mechanical Analysis System Tuning Research Fields


4 Robot Football What is Robot Football? fully Autonomous Robotic Players that play football Worldwide organizers of Robot Football Competitions: FIRA RoboCup FIRA Founder Professor Jong-Hwan Kim 4



5 Popular FIRA Leagues MiroSot Large League: 11 aside Middle League: 5 aside SimuroSot Simulation of MiroSot 5 aside HuroSot Humanoid Robots Onboard vision/control 5
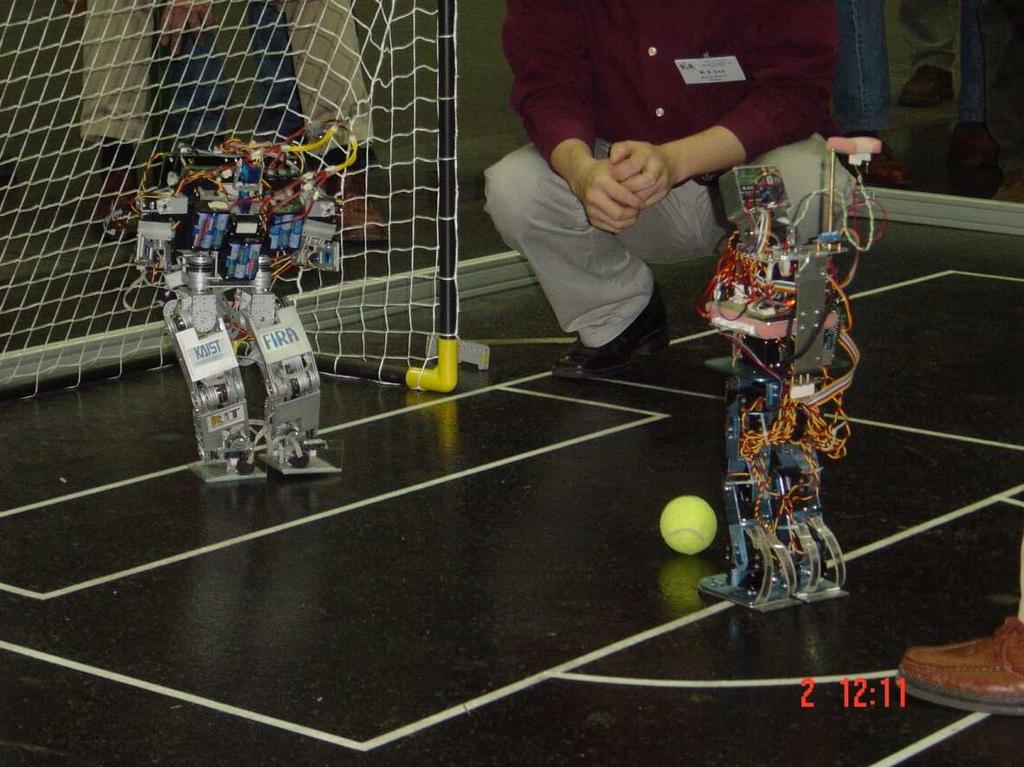
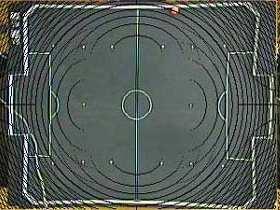
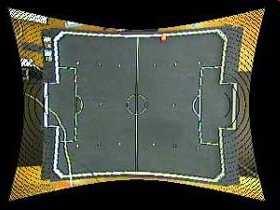
6 Popular FIRA Leagues All FIRA leagues are played robots autonomously, there is no human remote control. The there is only a start and stop button for human intervention. MiroSot is played on MiroSot: A wooden pitch painted black. The 5 aside pitch is 1800x2200 mm. Each team positions a camera above the pitch that can recognize the robots through a vision system computer. The computer makes a decision on where to send the robots. This is passed to the robots via radio link. The robots are 7.5 cm cubed. It is allowed to put any hardware into the robots,camera or computer. They play with an orange golf ball.
7 Popular FIRA Leagues SimuroSot SimuroSot is a simulation of a MiroSot game. It is a league in its own right. The Strategy for the SimuroSot is an exchangeable software module ( DLL ). Every team writes a strategy module and lets it compete. The Simulator was written in Macromedia Studio.
8 Popular FIRA Leagues HurSot: HuroSot is a FIRA league that is played with humanoid robots. In the smallest category they are limited to 50cm height and must have all vision and processing onboard. The league has recently gained popularity. There are several challenges that the robot attempts to gain points in the HuroSot competition: Marathon, Penalty shootout, Basketball, Sprint, Obstacle Run, walk over uneven terrain and a 3 aside football match.
9 HuroSot 9



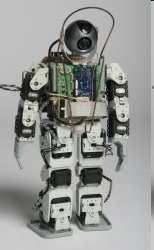
10 HuroSot Robots in Plymouth Prototype early 2007 San Francisco 2007 Zurich

11 11
12 Robot Football What makes a robot intelligent? Intelligent information processing Sensors provide information for processing 12
13 Robot Football Sensors used in Robotics: Camera Infra-Red Distance Sensors Laser Range Finders Ultra Sonics ( Sonar) Simple switches Gyros 13

14 Robot Football: Comparing Robotic Intelligence RoboSapien Sensors: - switches Remote Controlled Robot Football Humanoid Sensors: -Camera -Gyroscopes, -Accelerometers -Force feedback Completely Autonomous 14
15 Robot Football System Overview MiroSot League Camera Image Processing Strategy Robot movement 15
16 16 Plymouth Robot Football 1995 Robot Football established in South Korea and Japan 1996 Mirosot'96 was held in KAIST, Korea Mirosot'97 was held in KAIST, Korea Robot Football established in Plymouth,U.K. by Dr Paul Robinson and Jeff Johnson 1998 University of Plymouth and the Open University jointly participate in the FIRA World Cup in Paris, France Further participations: 2002 FIRA Wold Cup 2002, in South Korea 2003 FIRA Wold Cup 2003 in Vienna, Austria 2003 Robot Football at the Weird world exhibition 2003 FIRA European Cup in Lublijana, Slovenia 2004 University of Plymouth becomes U.K. Champion 2004 FIRA WorldCup in Busan, South Korea 2004 FIRA European Championships in Munich, Germany 2005 FIRA WorldCup in Singapore 2005 FIRA European Championship in Twente, Nederland 2006 FIRA WorldCup in Dortmund, Germany 2007 FIRA WorldCup in San Francisco, USA 2008 FIRA WorldCup in Zurich, Switzerland / Linz, Austria Next: 2009 FIRA WorldCup in Incheon, South Korea

17 Plymouth Robot Football 17
18 Student Projects Research Open Days (Course Promotion) Competitions
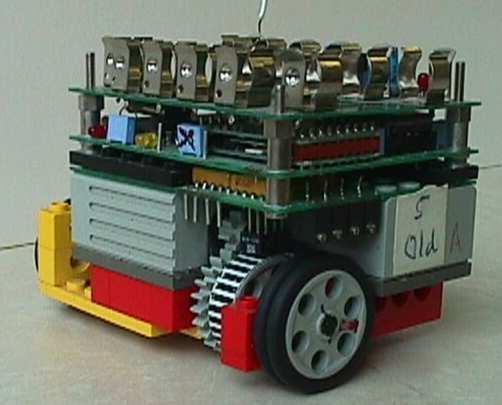

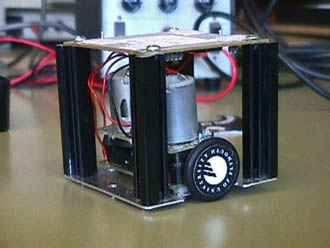
19 Generations of Robots in Plymouth
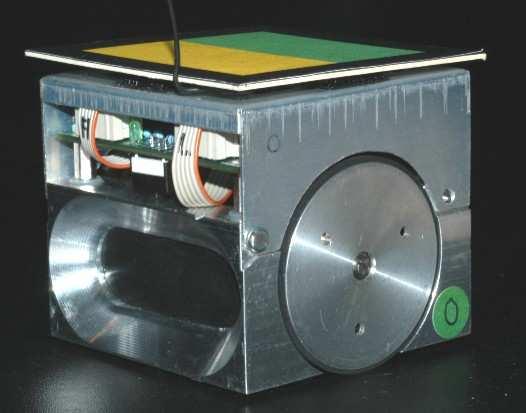
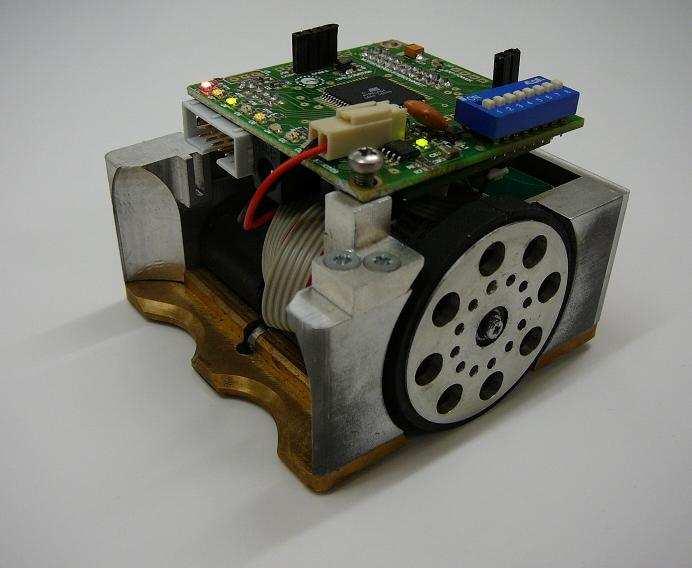
20 Specs Standard Competition Robot Made of a milled block of aluminium Size: 7.5 x 7.5 x 7.5 (cm) Weight: g Power: 300mAh 1000mAh 7.4V LiIon pack Max Velocity: 2-3 m/s Motor: Faulhaber 2224 DC Motor Gear Ratio: 8:1 CPU: ATMEL ATMEGA for Control : PID, PWM ( some models have Intel IAR 296C or Intel 188) Communication: RF modules (418 & 433 MHz) Radiometrix RX/TX2, BIM2or ZigBee/XBee 2.4GHz Typically 19200bps or 38400bps

21 UoP Circuit Board 2007
22 UoP4 Radio Communication Protocol Packet send every frame containing the velocity left and right wheel...0x55 0x55 0x55 0xFF 0x72 [ CON1 CON2 ID1R ID1L ID2R ID2L ID3R ID3L... CRCH CRCL ] All robots listen to the same packet and take out their part 1 byte per velocity, therefore the range of the velocity is +/

23 Radio Transmitter SkyNet 23


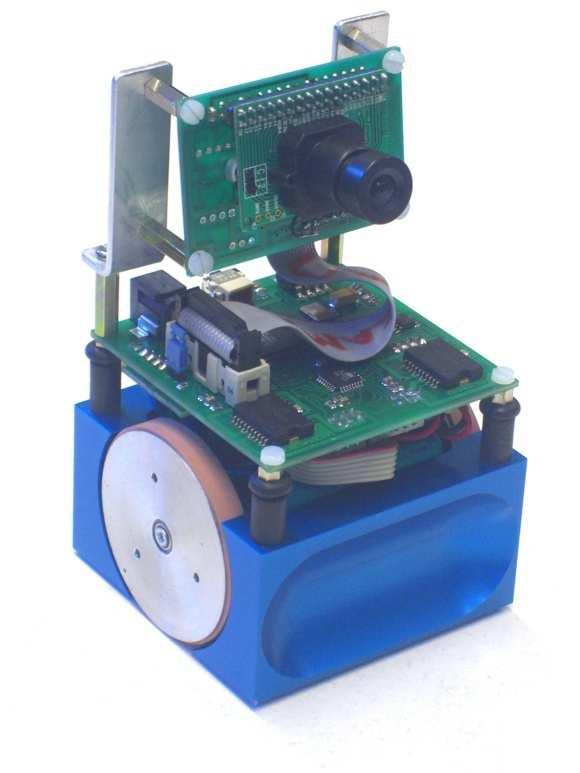
24 Modified Yujin YSR 1 st Generation: buy a Robot Soccer Kit 2 nd Generation: modify the Kit 3 rd Generation: design your own Yujin YSR Chassis with custom circuit board 24



25 Miabot Pro Research Robot

26 Bluetooth communication enables communication of a large swarm of robots. With the stackable bluetooth server hundreds of robots can be controlled at once.
27 Bluetooth Bandwidth: 1 MBit Packet delivery is guaranteed, no errors ( checksum in protocol stack ) Latency 39 ms, Std. Deviation 16 ms Pairing Bluetooth Server ( autoconnect ) Robot Football is Using the Serial Peripheral Protocol (SPP)

28 Robot Football Image Processing 28

29 Robot Football Image Processing 29

30 Robot Football Image Processing 30

31 31
32 Hue Arthur Hatt, "A Red/Green/Violet color wheel", The Colorist, 1908
 colour space, which is a cube, this is not as easy to define.")
33 Hue In order to identify the robots, one must identify the colour on the skirts (robot s top ). Colour identification is done by defining a range of colours that the robot has. This range of colours, for example Yellow+Lemon yellow is shown together in this Hue circle. In RGB (red, green, blue) colour space, which is a cube, this is not as easy to define. Furthermore, a colour space where it is easy to define a colour has intensity separated out. The most common colour spaces used are HIS (Hue,Saturation, Intensity) and YUV.
34 Image Source: Wikipedia Magenta ID Blue Team Vision Systems Hue Cyan ID Green ID Yellow Team Ball 34
35 RGB to HSI HSI = Hue, Saturation, Intensity θ = H cos 1 θ = 2π θ 1 2 (R - G) [(R - G) + (R - B) ] G 2 otherwise + (R - B) + (G - B) B S = 1 min( R, G, B) I = R + G 3 + B 35
36 RGB to HSI This formulae convert from Red-Green-Blue colour space to HSI colour space. The Hue Theta is the actual colour. The saturation S shows how deep the colour is. Saturation is not used in most robot football systems. Intensity I is the brightness. The formula shows that brightness is actually an average of R,G and B. The values R,G and B are defined between 0 and 1. H is adjusted to be between 0 to 2 pi.
37 RGB to HSI void RGB_To_HSI(unsigned char B, unsigned char G, unsigned char R, double &H, double &S, double &I){ double min_rgb; if(r && G && B){ I = ((R+G+B)/3)/255.0; // Calculate Intensity min_rgb = (R<=G)? R : G; min_rgb = (min_rgb<=b)? min_rgb : B; S = ( (3.0 * min_rgb) / (R+G+B) ) ; // Calculate Saturation double num = ((R-G) + (R-B))/2.0; double denum = pow((double)(r-g), (double)2) + (double)(r-b) * (double)(g-b); H = acos(num/sqrt(denum)); // Calculate Hue if(s == 0) H = 0.0; else if(h == 0){ if(b>g) H = M_PI_2; else H = 0.017; } //3rd and 4rd quadrant if( (B>G) ){ H = 2.0 * M_PI - H; } }else{ I = 0.0; S = 0.0; H = 0.0;} } 37
: 38 Image Source:")
38 YUV Y = Intensity (luma) UV plane (chrominance): 38 Image Source: Wikipedia
39 Grey or Colour? If R,G and B have the same intensity, it is grey. Example: 128,128,128 Extremes: 0,0,0 (black) 255,255,255 (white) Difference between the three bool isgrey(unsigned char b,unsigned char g,unsigned char r){ if( (abs(r-g)<grey_thresh) && (abs(g-b)<grey_thresh) ) { return true; } else { return false; } } The formula to turn RGB into a Hue-value is only usefull if the pixel is really coloured.pixels that are black,grey,white or anywhere in between do not carry any colour information. The football pitch is painted black. The vision system can use the grey thresholding to determine if it found a coloured object or just scanning the pitch. Once a coloured pixel has been identified, further searching in the area can take place to determine the exact position and size of the object. 39




40 Vision Systems: White Balance Not balanced Balanced How to recognise: Grey is not Grey Colours appear not like in real Edges have fade through multiple colours Histogram of RGB: The Peak corresponds to the Grey pitch. 40
41 Vision Systems: White Balance The red, green and blue channel can be out of synchronization. In this case the hue-value is shifted and grey pixels suddenly are slightly coloured. In order to synchronize red, green and blue a camera has a an automatic white balance. Vision systems should not rely on automatic white balance, especially in robot football, where the dark pitch takes up most of the screen, the automatic white balance does not work very well. Manual white balance during setup is best.

42 Vision Systems: White Balance Picture show bad white balance Analogue signal between camera and digitizer card Sharp changes in intensity reveal white balance problems Low pass filter effect of signal path create black strips 42

43 Spherical aberration 43
44 Spherical aberration zoom = 0.95 ; correction_v = ; cx=xsize/2.0; cy=ysize/2.0; for (ycnt=0;ycnt<ysize;ycnt++){ for (xcnt=0;xcnt<xsize;xcnt++){ x=(double)xcnt-cx ; y=(double)ycnt-cy ; d=sqrt(x*x+y*y); nx=cx+x*(zoom+correction_v*d); ny=cy+y*(zoom+correction_v*d); if(nx<0)nx=0;if(nx> xsize )nx=xsize; if(ny<0)ny=0;if(ny> ysize )ny=ysize; *tablep = ( (int)nx +(int)ny * xsize ) * 3 ; } } 44
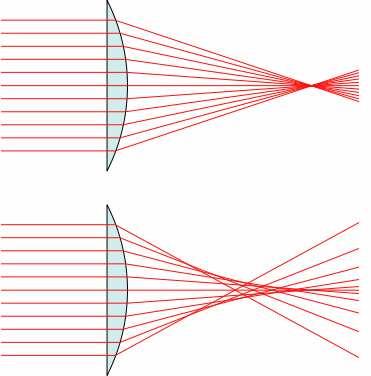
45 Spherical aberration Spherical aberration is caused by the shape of the lens near the edge that is not ideal. However, due to production techniques this is the most common type of lens. Zoom lenses usually have more aberration than fixed lenses. There is no aberration in the centre, and along the main axes. There are two problems problems caused by aberration in object recognition: 1.Objects appear smaller in corners (less pixels) and may therefore be missed 2.The coordinates of Objects are offset to the real world.
46 Spherical aberration The source code shown earlier corrects the whole image. There are two problems: 1. Black strips appear from the stretching 2. Computationally intensive Solution: After calibration, only correct the coordinates of the identified objects ( colour blobs ).

. Therefore spotlights can not be used.")
47 Vision Systems The human eye can deal with a wide range of intensity (brightness). A camera CCD only works with a very narrow range. In order to make it easier for the camera there must not be any variation in intensity across the field of view. Spot lights are bright, however they have a wide variation in brightness (easily 500 Lux). Therefore spotlights can not be used. Fluorescent lighting tubes are the best. A diffuser on them improves the even spreading of light further. Even Lighting is important 1000 Lux 47

48 Vision System at JUST 48
49 Vision Systems Hue Spectrum Examples: 4. too bright (e.g. >1200 Lux) Saturation prevents doing measurements. 3. bright (e.g. <1200 Lux) The spectrum is a thin peak. 2. normal conditions (e.g. <600 Lux) The spectrum shows a round hump. 1. too dark ( e.g. <200 Lux) Everything is grey (noise), all colours are detected equally. line around 20% 49
-> CCD -> Gain -> Brightness")
50 Vision Systems Camera : path of the light/information: Iris-> Shutter (exposure)-> CCD -> Gain -> Brightness 50
51 Vision Systems Image Processing: Must be very fast: 640x480 x 3Bytes x30 fps = MByte/sec! Avoid Floating Point Calculations Avoid Convolution (kernel) based Filters Avoid Processing every Pixel Use Look up tables (e.g. RGB to HSI, aberration ) 51

52 Vision Systems Algorithms to find coloured Regions Blobs : Cross Scan Sampling the image in a rough grid. When a coloured pixel is found neighbouring pixels are scanned horizontally and vertically in a cross to measure the extent of the blob. With an estimate of the extent a new centre is found and another cross scan takes place. 52
 scan horz, (in the new vert.")
53 Vision Systems Cross Scan: Scan horz. (find centre) Scan vert. (in the horz. middle) scan horz, (in the new vert. middle) done 53
54 Vision Systems Algorithms to find coloured Regions Blobs : Region Growing Sampling the image in a rough grid. When a coloured pixel is found a new region is defined. The neighbours and the neighbours of the neighbours are recursively investigated and added to the region. Pseudo Code Example: Check_Region(x,y,BlobID){ } if(! isgrey(x,y) ){ }else{ return; addpixel_to_blob(x,y,blobid); Check_Region(x+1,y,BlobID); Check_Region(x,y+1,BlobID); Check_Region(x-1,y,BlobID); Check_Region(x,y-1,BlobID); 54
55 Blob List Duplicate Elimination Check With, Height min and max Check distance between blobs to find robots 55
56 Vision System From Blobs to Robots: Blob Linking ID 1 ID 2 ID 3 Link Team colour with ID colour 56
57 Vision System Calibration The robots colour patches are small, typically between 6-15 pixel wide. This makes identification difficult, and the calibration process delicate. It takes up to 1 hour to calibrate a robot football vision system. ( be patient )

58 Simulator Thanks to: Jun Jo University of West Australia 58
59 Simulator Simulator is compatible with RSE Frame rate RSE: 30 fps, Simulator 60fps Data in: Position, Orientation of robots Data out: Motor commands: wheel velocity 59
60 Robot Football Strategy Overview Role Selection ( nearest to the ball? behind the ball? ) Individual Player State Engine ( move, stop, turn, wait ) Guidance System ( Trajectory following ) Low Level Control ( Wheel speeds, slip ) 60
61 Robot Football Strategy Role Selection Defender1 Goalkeeper Striker Defender2 Striker Assistant 61
62 Robot Football Strategy Role Selection Goalkeeper: Stay on the line, predict incoming ball go out only when there is no danger Defender Like goalkeeper, predict incoming ball and get in between ball and home side Kick the ball out of the area Clear the ball from corners Striker Get behind the ball in order to kick it towards the goal Assistant If Striker / Defender fails, the ball will pass to the assistant 62
63 Robot Football Player State Engine ball-goal line: Robot must approach from a direction in line with the ball and the goal. A circle movement is simple, with constant velocity on both wheels (one faster than the other) the robot drives in a circle. Everything is moving, robot and ball, therefore prediction must be used. Striker 63
64 Robot Football Strategy - Guidance System Line of Sight Guidance or Missile Guidance θ Target = atan2( Y, X ) Θ robot Δy Θ error Θ Target θ error = θ Target θ Robot Δx 64
65 Robot Football Robot Control The robots heading angle at an instant is in the same direction as its velocity vector V V V Right V = V R + V 2 L V Left ω ω = V R V 2r L 65
66 Robot Football Robot Control Control System for one of the two wheels: V Θ Target + - Θ error PID ω demand + + V Right-dem. Robot x y V Left-dem. Θ robot Θ robot 66
67 Simulator Variables Variables ( robots have an ID from 0 to 4 in the simulator and 1 to 5 in the vision system ) env->currentball.pos.x env->currentball.pos.y env->home[id].pos.x env->home[id].pos.y env->home[id].rotation env->home[id].velocityleft env->home[id].velocityright
68 Guidance System Simulator extern "C" STRATEGY_API void Strategy ( Environment *env ) { int id = 0; double targetx = env->currentball.pos.x; double targety = env->currentball.pos.y; double dx = targetx - env->home[id].pos.x; double dy = targety - env->home[id].pos.y; double theta = atan2(dy,dx)*180.0/pi; double error = theta - env->home[id].rotation; double V = 20; env->home[id].velocityleft = V - error * 0.1; env->home[id].velocityright = V + error * 0.1; } 68
69 Limit angle to +/- 180 double limit(double angle){ double ret = angle; if(angle > 180.0) {ret = -( angle);} else if(angle <= ) {ret = ( angle);} if(angle > 180.0) {ret = -( angle);} else if(angle <= ) {ret = ( angle);} return ret; } error = limit(error); 69
70 Goal Keeper Where will the ball hit the goal? Hint: y = mx+ c
71 Role Selection Role selection Philosophies: Put closest player to the ball in charge Designate each player and area to play in Decisions influenced by if the player is in front of or behind the ball Decisions influenced by attacking or defending strategy Decisions can be made locally, from a robots point of few -> Swarm behaviour 71
72 Simulator vs Real System Less time delay in simulator ( one frame 1/60 ) Less noise in the simulator No friction, no slip! Controller tuning, speed reduction when switching from simulator to real system Frame rate 60fps in simulator, in real 30fps ( frame rate proportional to error and therefore proportional to the kp-gain in the controller )
73 Advanced Strategy: Avoidance with Vector Fields Robot Avoidance

74 Advanced Strategy: Vector Fields Wolf et al. (2004) 74
75 Advanced Strategy: Vector Fields 75
76 Advanced Strategy: Waypoints Alternative form of avoidance Uses a state-engine while vector fields may not need a state engine
77 Advanced Strategy: Waypoints: Striker Thinking like a striker. Strike Cone Strike Through Pos Strike Pos
78 Advanced Strategy: Waypoints: Defender Thinking like a defender.
79 Free Body Diagram m 1 mass of wheel I Inertia of wheel about 1 1 x=aθ G F F 1 = m x& R = 1 & 1+ m1 g R2 M Fa= I & θ 1 [1] [2] [3] F = µr 2 [4] only true on the limit, in fact 0 F µ R 2 79
80 Free Body Diagram F 1 = m x& 2 & R2 + R3 = m2 g F L 1 + R3b M = 0 [5] [6] [7] Aim to maximise R2 80
81 Free Body Diagram M is known [1], [5], [3] From [1] F F = = F 1 + m && x = m 1 ( m1 + m 2 )&& x 2 && x+ m && x 1 From [3] M ( m + m ax && = I && 1 2 ) 1θ 2 M ( m + m a && θ = I && 1 2 ) 1θ 2 [ I + ( m + m ) a ]&& θ = M From [7] R b= M F L R = [ M b 1 F L] = 1 1 [ b M 1 m & 2xL ] = [ M b m a & θ L] 2 R 3 known also & known θ & From [6] R 2 = m2g R3 R 2 known Check F R 2 < µ 81
82 Robot Football Comparison to Motor Sports Similarities: Low centre of gravity Low inertia Research on tyre material Race track timing to test performance Utilising latest technology, i.e. Motors,Camera
83 Robot Control: Tuning forward velocity vs. angular velocity v= ωr a a n n = = v 2 r 2 v = v ω vω Limit centripetal acceleration 83
84 Robot Control: Tuning Controlling slip: Traction control Measure wheel slip by detecting acceleration of the wheel that is higher than the robot can do given its mass and torque. Encoder counting -> test if too high -> cut power 84
85 Research Fields Multiple Camera Systems (see Wolf et al. 2005) Control Problems with Autonomous vehicles ( Path Planning, kinematics ) Predictive Control Research ( e.g. Kalman Filters ) Fast Vision Algorithms 85
86 Robot Football Benefits for Students Provides practical experience to students Students get in touch with latest technology producing capable engineers for industry Students are able to publish scientific papers as undergraduates Students get to travel around the world (next FIRA WorldCups are in South Korea and in South Africa?) 86
87 References Joerg Christian Wolf, Phil Hall, Paul Robinson, Phil Culverhouse, "Bioloid based Humanoid Soccer Robot Design" in the Proceedings of the Second Workshop on Humanoid Soccer 2007 IEEE-RAS International Conference on Humanoid Robots, Pittsburgh (USA), November 29, 2007 J.C. Wolf, J.D. Oliver, P. Robinson and C. Diot, "Multi-site development of a FIRA large league robot football system" in the Proceedings of Third International Conference on Computational Intelligence, Robotics and Autonomous Systems, Singapore(CIRAS) 2005, (ISSN: ), IEEE sponsored J.C. Wolf, P. Robinson, J.M. Davies, "VECTOR FIELD PATH PLANNING AND CONTROL OF AN AUTONOMOUS ROBOT IN A DYNAMIC ENVIRONMENT" in the Proceedings of the 2004 FIRA Robot World Congress (Paper 151) P.Robinson, J.C. Wolf, J.A.Law, J.D. Oliver, K.W.Young, D.A. Harewood-Gill "RECENT MIROSOT DEVELOPMENTS IN THE UK" in the Proceedings of the 2004 FIRA Robot World Congress (Paper 158) P.Robinson, P.Hall, J.Wolf, R.Phillips, C.Peck P.Culverhouse, R.Bray, AJ.Simpson, "The Technology and Challenges of Mirosot Robot Football" presented at the UK Championships of FIRA Robot Football
88 Web Resources For source codes, circuit diagrams, documentation the university has a FTPserver, please joerg to get the URL 88

89 Joerg Wolf was born in 1978 in Germany where he grew up. He is married and lives in England. He has gained his BEng degree in Robotics and Automated Systems from the University of Plymouth, U.K.in He joined the Centre for Robotics and Intelligent Systems at the university, where he completed his PhD in Human-Robot Interaction in In his young academic career, he has published 12 publications. Dr Wolf is a member of the IET and IEEE. In 2001 he joined the University s Robot Football team. He was team Manager of the Plymouth Drakes Robot football team from Under his leadership, the Plymouth Drakes became U.K. Champion 4 times in a row. Dr Wolf is member of a Robot Football team that has presented England in international Robot Football competitions. Contributing to the team druring 15 competitions he has gained valuable experience in all areas of the FIRA MiroSot and HuroSot leagues. As a result he has been invited to the IET and to conferences to present his work. He worked with Merlin System Corp. in consulting and training Robot Football teams. He is currently starting a lectureship in Humanoid Robotics at the University of Plymouth. 89
STRATEGY PLANNING FOR MIROSOT SOCCER S ROBOT
 STRATEGY PLANNING FOR MIROSOT SOCCER S ROBOT CRISTINA FLORIANA PANA, NICU GEORGE BIZDOACA, IONUT CRISTIAN RESCANU, MARIUS NICULESCU Department of Mechatronics University of Craiova Address Bvd. Decebal
STRATEGY PLANNING FOR MIROSOT SOCCER S ROBOT CRISTINA FLORIANA PANA, NICU GEORGE BIZDOACA, IONUT CRISTIAN RESCANU, MARIUS NICULESCU Department of Mechatronics University of Craiova Address Bvd. Decebal
A new AI benchmark. Soccer without Reason Computer Vision and Control for Soccer Playing Robots. Dr. Raul Rojas
 Soccer without Reason Computer Vision and Control for Soccer Playing Robots Dr. Raul Rojas A new AI benchmark -computer vision in real time - embodied intelligence: mechanics - energy management - local
Soccer without Reason Computer Vision and Control for Soccer Playing Robots Dr. Raul Rojas A new AI benchmark -computer vision in real time - embodied intelligence: mechanics - energy management - local
AndroSot (Android Soccer Tournament) Laws of the Game 2010
 Laws of the Game 2010") AndroSot (Android Soccer Tournament) Laws of the Game 2010 Tzuu-Hseng Steve Li Advanced Intelligent Robot and System (airobots) Laboratory Department of Electrical Engineering National Cheng Kung University
AndroSot (Android Soccer Tournament) Laws of the Game 2010 Tzuu-Hseng Steve Li Advanced Intelligent Robot and System (airobots) Laboratory Department of Electrical Engineering National Cheng Kung University
Line Following with RobotC Page 1
 Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
IDeA Competition Report. Electronic Swimming Coach (ESC) for. Athletes who are Visually Impaired
 for. Athletes who are Visually Impaired") IDeA Competition Report Electronic Swimming Coach (ESC) for Athletes who are Visually Impaired Project Carried Out Under: The Department of Systems and Computer Engineering Carleton University Supervisor
IDeA Competition Report Electronic Swimming Coach (ESC) for Athletes who are Visually Impaired Project Carried Out Under: The Department of Systems and Computer Engineering Carleton University Supervisor
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Programming the Goalkeeper of 20 DOF for FIRA Cup
 Programming the Goalkeeper of 20 DOF for FIRA Cup Mauro Santoyo Mora 1,Víctor Hugo Cacique Borrego 1,KarlaA. Camarillo Gómez 1, and J. Manuel Ibarrra Zannatha 2 1 Instituto Tecnológico de Celaya, Av. Tecnológico
Programming the Goalkeeper of 20 DOF for FIRA Cup Mauro Santoyo Mora 1,Víctor Hugo Cacique Borrego 1,KarlaA. Camarillo Gómez 1, and J. Manuel Ibarrra Zannatha 2 1 Instituto Tecnológico de Celaya, Av. Tecnológico
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas
 Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Open Research Online The Open University s repository of research publications and other research outputs
 Open Research Online The Open University s repository of research publications and other research outputs Developing an intelligent table tennis umpiring system Conference or Workshop Item How to cite:
Open Research Online The Open University s repository of research publications and other research outputs Developing an intelligent table tennis umpiring system Conference or Workshop Item How to cite:
ICS 606 / EE 606. RoboCup and Agent Soccer. Intelligent Autonomous Agents ICS 606 / EE606 Fall 2011
 Intelligent Autonomous Agents ICS 606 / EE606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 RoboCup and Agent Soccer www.robocup.org Paper discussion The road to RoboCup 2050. Burkhard, H.D., Duhaut, D.,
Intelligent Autonomous Agents ICS 606 / EE606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 RoboCup and Agent Soccer www.robocup.org Paper discussion The road to RoboCup 2050. Burkhard, H.D., Duhaut, D.,
Impact Points and Their Effect on Trajectory in Soccer
 Proceedings Impact Points and Their Effect on Trajectory in Soccer Kaoru Kimachi 1, *, Sungchan Hong 2, Shuji Shimonagata 3 and Takeshi Asai 2 1 Doctoral Program of Coaching Science, University of Tsukuba,
Proceedings Impact Points and Their Effect on Trajectory in Soccer Kaoru Kimachi 1, *, Sungchan Hong 2, Shuji Shimonagata 3 and Takeshi Asai 2 1 Doctoral Program of Coaching Science, University of Tsukuba,
Standard League WRO Football Simple Simon EV3 Training Curriculum
 Standard League WRO Football Simple Simon EV3 Training Curriculum Brian Thomas **LEGO, EV3 Mindstorms and Robolab are Registered Trademarks of the LEGO Corporation RoboCup Junior Australia Inc Copyright
Standard League WRO Football Simple Simon EV3 Training Curriculum Brian Thomas **LEGO, EV3 Mindstorms and Robolab are Registered Trademarks of the LEGO Corporation RoboCup Junior Australia Inc Copyright
The NXT Generation. A complete learning solution
 The NXT Generation A complete learning solution 2008 The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts
The NXT Generation A complete learning solution 2008 The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts
GEN II Robot Soccer EV3 Compass Training Curriculum Brian Thomas
 GEN II Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2015 1 GEN II EV3 Robot Soccer Training Overview Welcome! The aim of this curriculum is to guide
GEN II Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2015 1 GEN II EV3 Robot Soccer Training Overview Welcome! The aim of this curriculum is to guide
FIRA ROBOT SOCCER COMPETITION. Robot Soccer Competition Singapore Robotic Games 2012 INTRODUCTION
 INTRODUCTION ROBOT SOCCER COMPETITION The objective of the robot soccer is to build a team of robots to play 5-a-side football against an opponent robot team. Each robot soccer team shall setup a global
INTRODUCTION ROBOT SOCCER COMPETITION The objective of the robot soccer is to build a team of robots to play 5-a-side football against an opponent robot team. Each robot soccer team shall setup a global
Drills and Conditioned Games To Improve and Develop Team-Play
 Drills and Conditioned Games To Improve and Develop Team-Play Warm Up: # block: Purpose: Working on Ball handling (soloing, hand passing, catching) and fitness Requirements: Minimum 16 players, 2 at each
Drills and Conditioned Games To Improve and Develop Team-Play Warm Up: # block: Purpose: Working on Ball handling (soloing, hand passing, catching) and fitness Requirements: Minimum 16 players, 2 at each
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs
 Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Robocup 2010 Version 1 Storyboard Prototype 13 th October 2009 Bernhard Hengst
 Robocup 2010 Version 1 Storyboard Prototype 13 th October 2009 Bernhard Hengst Developmental Research Strategy! Fail-fast, fail cheap! We should accept poor performance but insist it is complete! Version
Robocup 2010 Version 1 Storyboard Prototype 13 th October 2009 Bernhard Hengst Developmental Research Strategy! Fail-fast, fail cheap! We should accept poor performance but insist it is complete! Version
#19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS
 #19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS Final Research Report Luis E. Navarro-Serment, Ph.D. The Robotics Institute Carnegie Mellon University November 25, 2018. Disclaimer
#19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS Final Research Report Luis E. Navarro-Serment, Ph.D. The Robotics Institute Carnegie Mellon University November 25, 2018. Disclaimer
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
RoboCupJunior Soccer Rules for Big Field SuperTeams 2014
 RoboCupJunior Soccer Rules for Big Field SuperTeams 2014 RoboCupJunior Soccer Technical Committee 2014: Katsumi Masaoka (Japan), CHAIR, k-mac@sea.plala.or.jp Luis José López (Mexico), llopez@tecnovanguardia.com
RoboCupJunior Soccer Rules for Big Field SuperTeams 2014 RoboCupJunior Soccer Technical Committee 2014: Katsumi Masaoka (Japan), CHAIR, k-mac@sea.plala.or.jp Luis José López (Mexico), llopez@tecnovanguardia.com
RoboCupJunior Soccer Rules for SuperTeams 2016
 RoboCupJunior Soccer Rules for SuperTeams 2016 Soccer Technical Committee 2016: Paul Manns pfmanns@googlemail.com (Germany) Gio Spina profspina@gmail.com (Canada) Katsumi Masaoka k mac@sea.plala.or.jp
RoboCupJunior Soccer Rules for SuperTeams 2016 Soccer Technical Committee 2016: Paul Manns pfmanns@googlemail.com (Germany) Gio Spina profspina@gmail.com (Canada) Katsumi Masaoka k mac@sea.plala.or.jp
Lab 4: Pressure Gradients over a Wing
 2009 Lab 4: Pressure Gradients over a Wing Innovative Scientific Solutions Inc. 2766 Indian Ripple Road Dayton, OH 45440 (937)-429-4980 Lab 4: Pressure Gradients over a Wing Introduction: Like the previous
2009 Lab 4: Pressure Gradients over a Wing Innovative Scientific Solutions Inc. 2766 Indian Ripple Road Dayton, OH 45440 (937)-429-4980 Lab 4: Pressure Gradients over a Wing Introduction: Like the previous
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Laboratory 2(a): Interfacing WiiMote. Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments)
: Interfacing WiiMote. Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments)") Laboratory 2(a): Interfacing WiiMote Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments) Instructors: Edward A. Lee Sanjit A. Seshia University of California, Berkeley EECS
Laboratory 2(a): Interfacing WiiMote Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments) Instructors: Edward A. Lee Sanjit A. Seshia University of California, Berkeley EECS
WiiMaze Design Document March 13, 2008
 WiiMaze Design Document March 13, 2008 Yezhen Lu (yl2194) Brian Ramos (bjr2102) Shaun Salzberg (sds2110) Introduction We are going to implement a simple maze game using the Altera DE2 Board, a Wiimote,
WiiMaze Design Document March 13, 2008 Yezhen Lu (yl2194) Brian Ramos (bjr2102) Shaun Salzberg (sds2110) Introduction We are going to implement a simple maze game using the Altera DE2 Board, a Wiimote,
Agood tennis player knows instinctively how hard to hit a ball and at what angle to get the ball over the. Ball Trajectories
 42 Ball Trajectories Factors Influencing the Flight of the Ball Nathalie Tauziat, France By Rod Cross Introduction Agood tennis player knows instinctively how hard to hit a ball and at what angle to get
42 Ball Trajectories Factors Influencing the Flight of the Ball Nathalie Tauziat, France By Rod Cross Introduction Agood tennis player knows instinctively how hard to hit a ball and at what angle to get
TIGERs Mannheim. Extended Team Description for RoboCup 2017
 TIGERs Mannheim (Team Interacting and Game Evolving Robots) Extended Team Description for RoboCup 2017 Mark Geiger, Chris Carstensen, Andre Ryll, Nicolai Ommer, Dominik Engelhardt, Felix Bayer Department
TIGERs Mannheim (Team Interacting and Game Evolving Robots) Extended Team Description for RoboCup 2017 Mark Geiger, Chris Carstensen, Andre Ryll, Nicolai Ommer, Dominik Engelhardt, Felix Bayer Department
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Opleiding Informatica
 Opleiding Informatica Determining Good Tactics for a Football Game using Raw Positional Data Davey Verhoef Supervisors: Arno Knobbe Rens Meerhoff BACHELOR THESIS Leiden Institute of Advanced Computer Science
Opleiding Informatica Determining Good Tactics for a Football Game using Raw Positional Data Davey Verhoef Supervisors: Arno Knobbe Rens Meerhoff BACHELOR THESIS Leiden Institute of Advanced Computer Science
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Rules for. Polyathlon. Version Released
 Object of the game: What is a polyathlon? Rules for Polyathlon Version 151021 Released Polyathlon is a series of contests or events similar to the athletic decathlon where robots compete to determine the
Object of the game: What is a polyathlon? Rules for Polyathlon Version 151021 Released Polyathlon is a series of contests or events similar to the athletic decathlon where robots compete to determine the
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots
 ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016
 Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016 Peter Yu, Fangzhou Xia, Ryan Fish, Kamal Youcef-Toumi, and Alberto Rodriguez 2016-11-29 Note 1. Website
Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016 Peter Yu, Fangzhou Xia, Ryan Fish, Kamal Youcef-Toumi, and Alberto Rodriguez 2016-11-29 Note 1. Website
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION Task and Rules Document
 NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
THe rip currents are very fast moving narrow channels,
 1 Rip Current Detection using Optical Flow Shweta Philip sphilip@ucsc.edu Abstract Rip currents are narrow currents of fast moving water that are strongest near the beach. These type of currents are dangerous
1 Rip Current Detection using Optical Flow Shweta Philip sphilip@ucsc.edu Abstract Rip currents are narrow currents of fast moving water that are strongest near the beach. These type of currents are dangerous
Johnston - Urbandale Soccer Club U8. Coaching Curriculum
 Johnston - Urbandale Soccer Club U8 Coaching Curriculum JUSC U8 Theme: Look After the Ball. U8 Topic Finder Click topic and jump there. Coaching Introduction and Overview U8 Coaches and their players and
Johnston - Urbandale Soccer Club U8 Coaching Curriculum JUSC U8 Theme: Look After the Ball. U8 Topic Finder Click topic and jump there. Coaching Introduction and Overview U8 Coaches and their players and
v2.3 USER MANUAL
 v2.3 USER MANUAL www.foresightsports.com Table of Contents 03 04 05 09 12 17 20 21 Activation Getting Started Play Compete Improve Settings Update Manager Glossary 04 11 05 12 03 Activation FSX Activation
v2.3 USER MANUAL www.foresightsports.com Table of Contents 03 04 05 09 12 17 20 21 Activation Getting Started Play Compete Improve Settings Update Manager Glossary 04 11 05 12 03 Activation FSX Activation
Available online at ScienceDirect. Procedia Engineering 112 (2015 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 112 (2015 ) 196 201 7th Asia-Pacific Congress on Sports Technology, APCST 2015 Dynamics of spin bowling: the normalized precession
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 112 (2015 ) 196 201 7th Asia-Pacific Congress on Sports Technology, APCST 2015 Dynamics of spin bowling: the normalized precession
A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY
 Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
the world s most advanced humanoid robot
 the world s most advanced humanoid robot 02 : ASIMO V2 : TECHNICAL GUIDE : ROBOT DEVELOPMENT : CONTENTS ROBOT DEVELOPMENT 3 HISTORY OF HUMANOIDS 5 ASIMO v1 7 ASIMO v2 16 THE FUTURE 18 Creating New Mobility
the world s most advanced humanoid robot 02 : ASIMO V2 : TECHNICAL GUIDE : ROBOT DEVELOPMENT : CONTENTS ROBOT DEVELOPMENT 3 HISTORY OF HUMANOIDS 5 ASIMO v1 7 ASIMO v2 16 THE FUTURE 18 Creating New Mobility
RoboCupJunior Soccer - SuperTeams Rules 2018
 RoboCupJunior Soccer - SuperTeams Rules 2018 RoboCupJunior Soccer Technical Committee Marek Šuppa (Slovakia) CHAIR Felipe Nascimento (The Netherlands) James Riley (Australia) Javier Delgado (México) Michael
RoboCupJunior Soccer - SuperTeams Rules 2018 RoboCupJunior Soccer Technical Committee Marek Šuppa (Slovakia) CHAIR Felipe Nascimento (The Netherlands) James Riley (Australia) Javier Delgado (México) Michael
Circular Motion - Horizontal
 Circular Motion - Horizontal Outcome(s): explain and apply the concepts of centripetal acceleration and centripetal force, as applied to uniform horizontal circular motion. A bucket being swung around
Circular Motion - Horizontal Outcome(s): explain and apply the concepts of centripetal acceleration and centripetal force, as applied to uniform horizontal circular motion. A bucket being swung around
Measurement of court speed and bounce. Rod Cross, Physics Department, Sydney University 2nd July 2006
 1 Measurement of court speed and bounce Rod Cross, Physics Department, Sydney University 2nd July 2006 The speed of a surface refers to the change in ball speed in a direction parallel to the surface.
1 Measurement of court speed and bounce Rod Cross, Physics Department, Sydney University 2nd July 2006 The speed of a surface refers to the change in ball speed in a direction parallel to the surface.
Technology. In the My Files [My Files] submenu you can store all the programs that you have made on the NXT or downloaded from your computer.
![Technology. In the My Files [My Files] submenu you can store all the programs that you have made on the NXT or downloaded from your computer.](/thumbs/74/70002303.jpg "Technology. In the My Files [My Files] submenu you can store all the programs that you have made on the NXT or downloaded from your computer.") NXT Main Menu My Files Files are automatically placed into the appropriate folders. When you download a program using a Sound file to the NXT, the program will be placed under Software files while the
NXT Main Menu My Files Files are automatically placed into the appropriate folders. When you download a program using a Sound file to the NXT, the program will be placed under Software files while the
AN ISOLATED SMALL WIND TURBINE EMULATOR
 AN ISOLATED SMALL WIND TURBINE EMULATOR Md. Arifujjaman Graduate Student Seminar: Master of Engineering Faculty of Engineering and Applied Science Memorial University of Newfoundland St. John s, NL, Canada
AN ISOLATED SMALL WIND TURBINE EMULATOR Md. Arifujjaman Graduate Student Seminar: Master of Engineering Faculty of Engineering and Applied Science Memorial University of Newfoundland St. John s, NL, Canada
Algorithm for Line Follower Robots to Follow Critical Paths with Minimum Number of Sensors
 International Journal of Computer (IJC) ISSN 2307-4523 (Print & Online) Global Society of Scientific Research and Researchers http://ijcjournal.org/ Algorithm for Line Follower Robots to Follow Critical
International Journal of Computer (IJC) ISSN 2307-4523 (Print & Online) Global Society of Scientific Research and Researchers http://ijcjournal.org/ Algorithm for Line Follower Robots to Follow Critical
Stabilizing Walking Gaits using Feedback from Gyroscopes
 Stabilizing Walking Gaits using Feedback from Gyroscopes Jacky Baltes Sara McGrath John Anderson Department of Computer Science University of Manitoba Winnipeg, Canada jacky,andersj@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
Stabilizing Walking Gaits using Feedback from Gyroscopes Jacky Baltes Sara McGrath John Anderson Department of Computer Science University of Manitoba Winnipeg, Canada jacky,andersj@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
An underwater autonomous platform/vehicle
 An underwater autonomous platform/vehicle R S Bradbeer 1, H F Lai 2, M H Lee 2, T W Ying 2 1 Department of Electronic Engineering, 2 Department of Manufacturing Engineering and Engineering Management City
An underwater autonomous platform/vehicle R S Bradbeer 1, H F Lai 2, M H Lee 2, T W Ying 2 1 Department of Electronic Engineering, 2 Department of Manufacturing Engineering and Engineering Management City
Kinematics-Projectiles
 1. A volleyball hit into the air has an initial speed of 10 meters per second. Which vector best represents the angle above the horizontal that the ball should be hit to remain in the air for the greatest
1. A volleyball hit into the air has an initial speed of 10 meters per second. Which vector best represents the angle above the horizontal that the ball should be hit to remain in the air for the greatest
Dual Line Laser Benchmark Road Profiler
 Roadbot Dual Line Laser Benchmark Road Profiler Paul Toom P. Eng. MBA ICC, Cherry Systems Glenn Hennin LMI3D Presented at RPUG 2015 2-5 November 2015 Raleigh NC 1 Presentation Overview Introduction of
Roadbot Dual Line Laser Benchmark Road Profiler Paul Toom P. Eng. MBA ICC, Cherry Systems Glenn Hennin LMI3D Presented at RPUG 2015 2-5 November 2015 Raleigh NC 1 Presentation Overview Introduction of
USER MANUAL. Intelligent Diagnostic Controller IDC24-A IDC24-AF IDC24-AFL IDC24-F IDP24-A * IDP24-AF * IDP24-AFL * IDP24-F * 1/73
 USER MANUAL Intelligent Diagnostic Controller IDC24-A IDC24-AF IDC24-AFL IDC24-F IDP24-A * IDP24-AF * IDP24-AFL * IDP24-F * *) Require software ID: DID-SW-001 1/73 Table of contents 1 General... 3 1.1
USER MANUAL Intelligent Diagnostic Controller IDC24-A IDC24-AF IDC24-AFL IDC24-F IDP24-A * IDP24-AF * IDP24-AFL * IDP24-F * *) Require software ID: DID-SW-001 1/73 Table of contents 1 General... 3 1.1
RoboCupJunior Soccer Rules 2009
 RoboCupJunior Soccer Rules 2009 These are the official rules for RoboCupJunior 2009. They are released by the RoboCupJunior Soccer Technical Committee for Soccer. These rules have priority over any translations.
RoboCupJunior Soccer Rules 2009 These are the official rules for RoboCupJunior 2009. They are released by the RoboCupJunior Soccer Technical Committee for Soccer. These rules have priority over any translations.
Practice Test: Vectors and Projectile Motion
 ame: Practice Test: Vectors and Projectile Motion Part A: Multiple Choice [15 points] 1. A projectile is launched at an angle of 30 0 above the horizontal. eglecting air resistance, what are the projectile
ame: Practice Test: Vectors and Projectile Motion Part A: Multiple Choice [15 points] 1. A projectile is launched at an angle of 30 0 above the horizontal. eglecting air resistance, what are the projectile
Simulation of the Hybtor Robot
 Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
University of Amsterdam. Faculty of Science The Netherlands. Dutch Nao Team. Technical Report. October
 University of Amsterdam Faculty of Science The Netherlands Dutch Nao Team Technical Report Authors: Caitlin Lagrand Michiel van der Meer Jonathan Gerbscheid Thomas Groot Sébastien Negrijn Patrick de Kok
University of Amsterdam Faculty of Science The Netherlands Dutch Nao Team Technical Report Authors: Caitlin Lagrand Michiel van der Meer Jonathan Gerbscheid Thomas Groot Sébastien Negrijn Patrick de Kok
Homework #10 Due Monday, May Compute the moment of inertia of the objects below.
 Homework #10 Due Monday, May 1. Compute the moment of inertia of the objects below. θ (a) Compute the moment of inertia of a thin rod of mass M and length R for rotations about its end. Explain why your
Homework #10 Due Monday, May 1. Compute the moment of inertia of the objects below. θ (a) Compute the moment of inertia of a thin rod of mass M and length R for rotations about its end. Explain why your
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES
 ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II.
 Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II Giuseppe Callea BhaiTech Technology BhaiTech Technology 1 Company Presentation Brief Recall
Determining the Limit Performance of a GP2 Race Car: from Reality to Multibody and Analytical Simulation - Part II Giuseppe Callea BhaiTech Technology BhaiTech Technology 1 Company Presentation Brief Recall
GOLFZON VISION was tested and
 GOLFZON VISION was tested and guaranteed by Tour Professional Golfers Tested on real golf courses by professional tour golfers to prove its accuracy of flying distance, fade, draw, and other qualities,
GOLFZON VISION was tested and guaranteed by Tour Professional Golfers Tested on real golf courses by professional tour golfers to prove its accuracy of flying distance, fade, draw, and other qualities,
Control Strategies for operation of pitch regulated turbines above cut-out wind speeds
 Control Strategies for operation of pitch regulated turbines above cut-out wind speeds Helen Markou 1 Denmark and Torben J. Larsen, Risø-DTU, P.O.box 49, DK-4000 Roskilde, Abstract The importance of continuing
Control Strategies for operation of pitch regulated turbines above cut-out wind speeds Helen Markou 1 Denmark and Torben J. Larsen, Risø-DTU, P.O.box 49, DK-4000 Roskilde, Abstract The importance of continuing
Kinematic Differences between Set- and Jump-Shot Motions in Basketball
 Proceedings Kinematic Differences between Set- and Jump-Shot Motions in Basketball Hiroki Okubo 1, * and Mont Hubbard 2 1 Department of Advanced Robotics, Chiba Institute of Technology, 2-17-1 Tsudanuma,
Proceedings Kinematic Differences between Set- and Jump-Shot Motions in Basketball Hiroki Okubo 1, * and Mont Hubbard 2 1 Department of Advanced Robotics, Chiba Institute of Technology, 2-17-1 Tsudanuma,
beestanbul RoboCup 3D Simulation League Team Description Paper 2012
 beestanbul RoboCup 3D Simulation League Team Description Paper 2012 Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek, and Sanem Sariel-Talay Artificial Intelligence
beestanbul RoboCup 3D Simulation League Team Description Paper 2012 Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek, and Sanem Sariel-Talay Artificial Intelligence
Tweeting Bottles and other stories
 Interaction Design Case Study - 2 Tweeting Bottles and other stories Speckled Computing Outcomes of Case Study - 1 Literal and Stylised Representations Focal and Peripheral attention Detailed and Abstracted
Interaction Design Case Study - 2 Tweeting Bottles and other stories Speckled Computing Outcomes of Case Study - 1 Literal and Stylised Representations Focal and Peripheral attention Detailed and Abstracted
THE DESIGN OF A SMALL-SIZE (F-180) ROBOCUP TEAM
 ROBOCUP TEAM") THE DESIGN OF A SMALL-SIZE (F-180) ROBOCUP TEAM P. Costa 1, A. Moreira 2, A. Sousa 3 FEUP-DEEC/ISR, Rua dos Bragas 4099 Porto Codex, Portugal, fax: +351 22 200080, 1 paco@fe.up.pt, 2 amoreira@fe.up.pt,
THE DESIGN OF A SMALL-SIZE (F-180) ROBOCUP TEAM P. Costa 1, A. Moreira 2, A. Sousa 3 FEUP-DEEC/ISR, Rua dos Bragas 4099 Porto Codex, Portugal, fax: +351 22 200080, 1 paco@fe.up.pt, 2 amoreira@fe.up.pt,
PERCEPTIVE ROBOT MOVING IN 3D WORLD. D.E- Okhotsimsky, A.K. Platonov USSR
 PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
AC : MEASUREMENT OF HYDROGEN IN HELIUM FLOW
 AC 2010-2145: MEASUREMENT OF HYDROGEN IN HELIUM FLOW Randy Buchanan, University of Southern Mississippi Christopher Winstead, University of Southern Mississippi Anton Netchaev, University of Southern Mississippi
AC 2010-2145: MEASUREMENT OF HYDROGEN IN HELIUM FLOW Randy Buchanan, University of Southern Mississippi Christopher Winstead, University of Southern Mississippi Anton Netchaev, University of Southern Mississippi
PropaGator Autonomous Surface Vehicle
 PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
Flow in a shock tube
 Flow in a shock tube April 30, 05 Summary In the lab the shock Mach number as well as the Mach number downstream the moving shock are determined for different pressure ratios between the high and low pressure
Flow in a shock tube April 30, 05 Summary In the lab the shock Mach number as well as the Mach number downstream the moving shock are determined for different pressure ratios between the high and low pressure
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Self-Driving Vehicles That (Fore) See
 See") Self-Driving Vehicles That (Fore) See Dariu M. Gavrila Intelligent Vehicles, TU Delft Berlin Tech.AD, March 5, 2018 Personal Introduction: Dariu M. Gavrila Born in Cluj (Romania) 1990 Doktoraal Degree
Self-Driving Vehicles That (Fore) See Dariu M. Gavrila Intelligent Vehicles, TU Delft Berlin Tech.AD, March 5, 2018 Personal Introduction: Dariu M. Gavrila Born in Cluj (Romania) 1990 Doktoraal Degree
A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data
 A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data Ting Fu Supervisor: Luis Miranda-Moreno, Nicolas Saunier Ting FU Outline 1. Motivation & Literature Review
A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data Ting Fu Supervisor: Luis Miranda-Moreno, Nicolas Saunier Ting FU Outline 1. Motivation & Literature Review
QUESTION 1. Sketch graphs (on the axes below) to show: (1) the horizontal speed v x of the ball versus time, for the duration of its flight;
 to show: (1) the horizontal speed v x of the ball versus time, for the duration of its flight;") QUESTION 1 A ball is thrown horizontally from a cliff with a speed of 10 ms -1 shown in the diagram at right. Neglecting the effect of air resistance and taking gravitational acceleration to be g +9.8ms
QUESTION 1 A ball is thrown horizontally from a cliff with a speed of 10 ms -1 shown in the diagram at right. Neglecting the effect of air resistance and taking gravitational acceleration to be g +9.8ms
Variable Face Milling to Normalize Putter Ball Speed and Maximize Forgiveness
 Proceedings Variable Face Milling to Normalize Putter Ball Speed and Maximize Forgiveness Jacob Lambeth *, Dustin Brekke and Jeff Brunski Cleveland Golf, 5601 Skylab Rd. Huntington Beach, CA 92647, USA;
Proceedings Variable Face Milling to Normalize Putter Ball Speed and Maximize Forgiveness Jacob Lambeth *, Dustin Brekke and Jeff Brunski Cleveland Golf, 5601 Skylab Rd. Huntington Beach, CA 92647, USA;
7 th International Conference on Wind Turbine Noise Rotterdam 2 nd to 5 th May 2017
 7 th International Conference on Wind Turbine Noise Rotterdam 2 nd to 5 th May 2017 Sound power level measurements 3.0 ir. L.M. Eilders, Peutz bv: l.eilders@peutz.nl ing. E.H.A. de Beer, Peutz bv: e.debeer@peutz.nl
7 th International Conference on Wind Turbine Noise Rotterdam 2 nd to 5 th May 2017 Sound power level measurements 3.0 ir. L.M. Eilders, Peutz bv: l.eilders@peutz.nl ing. E.H.A. de Beer, Peutz bv: e.debeer@peutz.nl
-SWEPT AWAY- Description & Overview. VEX Classroom Competition Swept Away
 -SWEPT AWAY- Description & Overview Swept Away is a head-to-head robotics competition designed and scaled to be run in a classroom environment by a single teacher. This game provides a challenge for designers
-SWEPT AWAY- Description & Overview Swept Away is a head-to-head robotics competition designed and scaled to be run in a classroom environment by a single teacher. This game provides a challenge for designers
This is your guide to practical training sessions and warm up exercises for Match Officials in Ontario.
 This is your guide to practical training sessions and warm up exercises for Match Officials in Ontario. These sessions have been carefully selected for maximum impact. You may add degrees of difficulty
This is your guide to practical training sessions and warm up exercises for Match Officials in Ontario. These sessions have been carefully selected for maximum impact. You may add degrees of difficulty
Neural Network in Computer Vision for RoboCup Middle Size League
 Journal of Software Engineering and Applications, 2016, *,** Neural Network in Computer Vision for RoboCup Middle Size League Paulo Rogério de Almeida Ribeiro 1, Gil Lopes 1, Fernando Ribeiro 1 1 Department
Journal of Software Engineering and Applications, 2016, *,** Neural Network in Computer Vision for RoboCup Middle Size League Paulo Rogério de Almeida Ribeiro 1, Gil Lopes 1, Fernando Ribeiro 1 1 Department
M. Mikkonen.
 Wind study by using mobile sodar technology M. Mikkonen Oulu University of Applied Sciences, School of Engineering, Oulu, Finland t3mimi00@students.oamk.com Abstract In this paper is presented a concept
Wind study by using mobile sodar technology M. Mikkonen Oulu University of Applied Sciences, School of Engineering, Oulu, Finland t3mimi00@students.oamk.com Abstract In this paper is presented a concept
AN31E Application Note
 Balancing Theory Aim of balancing How an unbalance evolves An unbalance exists when the principle mass axis of a rotating body, the so-called axis of inertia, does not coincide with the rotational axis.
Balancing Theory Aim of balancing How an unbalance evolves An unbalance exists when the principle mass axis of a rotating body, the so-called axis of inertia, does not coincide with the rotational axis.
1. A cannon shoots a clown directly upward with a speed of 20 m/s. What height will the clown reach?
 Physics R Date: 1. A cannon shoots a clown directly upward with a speed of 20 m/s. What height will the clown reach? How much time will the clown spend in the air? Projectile Motion 1:Horizontally Launched
Physics R Date: 1. A cannon shoots a clown directly upward with a speed of 20 m/s. What height will the clown reach? How much time will the clown spend in the air? Projectile Motion 1:Horizontally Launched
The HumiSys. RH Generator. Operation. Applications. Designed, built, and supported by InstruQuest Inc.
 The HumiSys RH Generator Designed, built, and supported by InstruQuest Inc. Versatile Relative Humidity Generation and Multi-Sensor System The new HumiSys with single or dual RH probes capabilities is
The HumiSys RH Generator Designed, built, and supported by InstruQuest Inc. Versatile Relative Humidity Generation and Multi-Sensor System The new HumiSys with single or dual RH probes capabilities is
Putting Report Details: Key and Diagrams: This section provides a visual diagram of the. information is saved in the client s database
 Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
Autodesk Moldflow Communicator Process settings
 Autodesk Moldflow Communicator 212 Process settings Revision 1, 3 March 211. Contents Chapter 1 Process settings....................................... 1 Profiles.................................................
Autodesk Moldflow Communicator 212 Process settings Revision 1, 3 March 211. Contents Chapter 1 Process settings....................................... 1 Profiles.................................................
U9-U10 Session Plans
 U9-U10 Session Plans Table of objectives U10/U11 SESSION 1 Dribbling and Feinting 1v1 Physical ABC s through drills and games Psychological & Social Enjoyment/Fun Build self esteem Create positive environment
U9-U10 Session Plans Table of objectives U10/U11 SESSION 1 Dribbling and Feinting 1v1 Physical ABC s through drills and games Psychological & Social Enjoyment/Fun Build self esteem Create positive environment
PRC CO ² -LASER PRESENTATION
 Page 1 of 7 PRC CO ² -LASER PRESENTATION GENERAL CHARACTERISTICS - Embedded PC104 Electronics with exchangeable software allowing very easy integration of customer specified functions: such as eg. specific
Page 1 of 7 PRC CO ² -LASER PRESENTATION GENERAL CHARACTERISTICS - Embedded PC104 Electronics with exchangeable software allowing very easy integration of customer specified functions: such as eg. specific
GRASS ROOTS TEAM/COACH. Curriculum
 GRASS ROOTS TEAM/COACH Curriculum Mission Statement To deliver the highest standards of excellence in soccer development to everyone. NVFC Grass Roots Team/Coach Development Program NVFC is pleased to
GRASS ROOTS TEAM/COACH Curriculum Mission Statement To deliver the highest standards of excellence in soccer development to everyone. NVFC Grass Roots Team/Coach Development Program NVFC is pleased to
RoboCup Humanoid League 2003 Rules
 1 of 11 04.09.2007 08:07 RoboCup Humanoid League 2003 Rules Last Updated: June 25, 2003. first draft as of: June 12, 2003. The main body of this draft is from the www.robocup.org homepage last updated
1 of 11 04.09.2007 08:07 RoboCup Humanoid League 2003 Rules Last Updated: June 25, 2003. first draft as of: June 12, 2003. The main body of this draft is from the www.robocup.org homepage last updated
Decentralized Autonomous Control of a Myriapod Locomotion Robot
 Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
LEGO Engineering Conferences ROBOLAB and MINDSTORMS Education Version 4.5 March 2008
 LEGO Engineering Conferences ROBOLAB and MINDSTORMS Education Version 4.5 March 2008 NXT-G Program Book II: Intermediate Robotics Activities for use with the NXT 2008 Tufts Center for Engineering Education
LEGO Engineering Conferences ROBOLAB and MINDSTORMS Education Version 4.5 March 2008 NXT-G Program Book II: Intermediate Robotics Activities for use with the NXT 2008 Tufts Center for Engineering Education
Efficiency Improvement of a New Vertical Axis Wind Turbine by Individual Active Control of Blade Motion
 Efficiency Improvement of a New Vertical Axis Wind Turbine by Individual Active Control of Blade Motion In Seong Hwang, Seung Yong Min, In Oh Jeong, Yun Han Lee and Seung Jo Kim* School of Mechanical &
Efficiency Improvement of a New Vertical Axis Wind Turbine by Individual Active Control of Blade Motion In Seong Hwang, Seung Yong Min, In Oh Jeong, Yun Han Lee and Seung Jo Kim* School of Mechanical &
AGE GROUP/PROGRAM: U14 TOWN WEEK # 1
 AGE GROUP/PROGRAM: U14 TOWN WEEK # 1 THEME: AWARENESS/ARGENTINA Improve 1 st touch Speed of play Playing with the head up Players on their toes, balanced and communicating. Good 1st touch out of the body
AGE GROUP/PROGRAM: U14 TOWN WEEK # 1 THEME: AWARENESS/ARGENTINA Improve 1 st touch Speed of play Playing with the head up Players on their toes, balanced and communicating. Good 1st touch out of the body
STAGE 2 ACTIVITIES 6-8 YEAR OLD PLAYERS. NSCAA Foundations of Coaching Diploma
 STAGE 2 ACTIVITIES 6-8 YEAR OLD PLAYERS NSCAA Foundations of Coaching Diploma 2V2 SHOOTING GAME This is a dynamic activity that emphasizes individual and small group attacking and defending. The action
STAGE 2 ACTIVITIES 6-8 YEAR OLD PLAYERS NSCAA Foundations of Coaching Diploma 2V2 SHOOTING GAME This is a dynamic activity that emphasizes individual and small group attacking and defending. The action
Roller AC Servo System
 Safely Instruction Roller AC Servo System HMI-15 User Manual Please read this manual carefully, also with related manual for the machinery before use the controller. For installing and operating the controller
Safely Instruction Roller AC Servo System HMI-15 User Manual Please read this manual carefully, also with related manual for the machinery before use the controller. For installing and operating the controller
C-5 SAM-S WEATHER COMMAND
 C-5 SAM-S WEATHER COMMAND User s Manual Version 1.0 September 26, 2005 P/N 0302121001 Coastal Environmental Systems 820 First Avenue South, Seattle, WA 98134 Telephone: 206-682-6048 1-800-488-8291 Fax:
C-5 SAM-S WEATHER COMMAND User s Manual Version 1.0 September 26, 2005 P/N 0302121001 Coastal Environmental Systems 820 First Avenue South, Seattle, WA 98134 Telephone: 206-682-6048 1-800-488-8291 Fax:
Nature Neuroscience: doi: /nn Supplementary Figure 1. Visual responses of the recorded LPTCs
 Supplementary Figure 1 Visual responses of the recorded LPTCs (a) The mean±sd (n=3 trials) of the direction-selective (DS) responses (i.e., subtracting the null direction, ND, from the preferred direction,
Supplementary Figure 1 Visual responses of the recorded LPTCs (a) The mean±sd (n=3 trials) of the direction-selective (DS) responses (i.e., subtracting the null direction, ND, from the preferred direction,