Sparse LBL aided INS for Subsea Positioning
|
|
|
- Kerrie Walters
- 5 years ago
- Views:
Transcription


1 Sparse LBL aided INS for Subsea Positioning Edward Moller Global Business Manager Construction Survey


2 What is LBL? GPS Network


3 What is LBL? We turn GPS upside down
4 LBL installed in a subsea field development
5 LBL - The Good and the Bad GOOD Accurate & precise Works in all water depths Redundancy / Robust Availability of trained operators LBL Not so good Time to install & transponder day rate Update rate / time for average fix Can we keep the good and remove/improve the not so good?

6 Adding INS
 and we know how fast we have moved and in which direction, we can reasonably determine where we are now.")
7 What is Inertial Navigation? An Inertial Navigation System (INS) uses measurements provided by accelerometers and gyroscopes to compute position and orientation relative to a known starting point. If we know where we started (e.g. initial position) and we know how fast we have moved and in which direction, we can reasonably determine where we are now. Inertial Navigation is inherently self contained, very precise and provides very high update rates.
8 Free Inertial Navigation Free Inertial Drift Small errors in acceleration and angular rate measurements lead to progressively larger navigation errors free initial drift
9 Velocity aiding from a DVL can reduce the drift Adding a calibrated DVL The DVL will reduce but not correct the drift Navigation error will be less than 0.1% of the distance travelled
10 Adding LBL range aiding further reduces drift LBL ranges Example shows exaggerated error
11 Adding LBL range aiding further reduces drift LBL ranges
12 Geometry plays a part Example shows exaggerated error


13 Single transponder aided INS Wow, so we only need a single transponder? North Africa st phase LBL arrays installed for structure placement 2 nd phase plan to Sparse LBL array INS for general ROV navigation
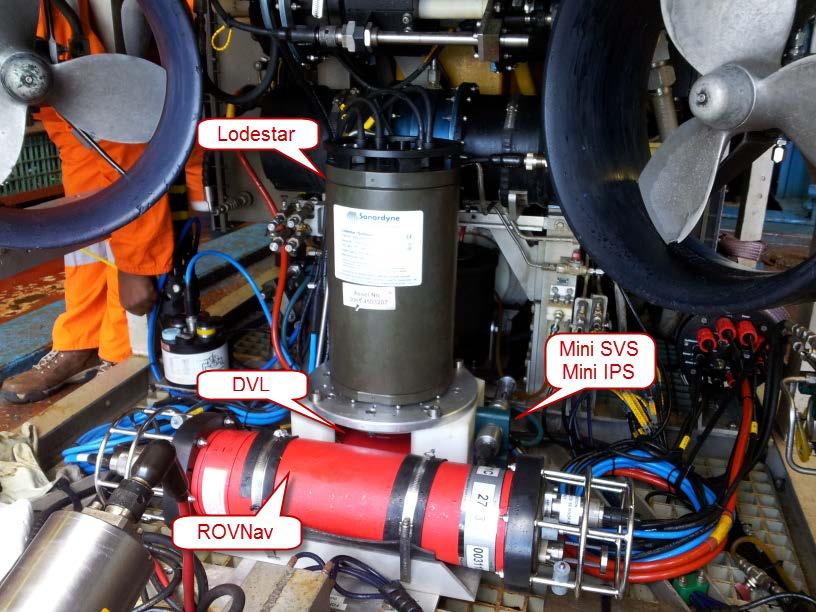

14 Single transponder aided INS ROV Setup
15 Sparse LBL INS Result 1 Single transponder 800m range Reccomended minimum of two transponder ranging not achieved Full LBL array position used as the reference Sparse LBL position fix within 20cm Average position fix taken with a 2 sigma of only 2.4cm Every INS position calculated at 100Hz meaning that average fixing is not required
16 Sparse LBL INS Result 2 Later that day, another position fix was taken with similar precision but now on the other side of the structure Why has it moved? This location was actually visible to two transponders and the other shift had used both transponders for aiding
17 How can sparse LBL INS be wrong? Position Bust A long term systematic error in your aiding source will directly result in an error of the INS position, e.g. transponder positions, sound velocity


18 Using sparse LBL aided INS in a relative mode Result so far is that we can navigate with Sparse LBL INS but extra operational diligence required. How about using it relatively then? Gulf of Mexico km final section of umbilical lay requiring 1.5m positioning at overage loop to ensure relative accuracy to target box


19 Using sparse LBL aided INS in a relative mode Known co-ordinate Three beacon array calibrated using traditional baselines, known coordinates and box-in. A 50 x 50m SLAM box-in manoeuvre was used to check the array calibration Range residuals confirmed to be <0.2m (1 sigma)

 ties in exactly")

20 Using sparse LBL aided INS in a relative mode SPRINT Sparse LBL ROV (Blue) ties in exactly with the structure position <10cm Spread when static
21 Why we really need at least 2 transponders Transponder to the side of the ROV Error ellipse gives good cross track (DCC) performance Along track error is large
22 Why we really need at least 2 transponders Transponder behind the ROV Error ellipse gives good along track error Cross track (DCC) performance is poor


23 Why we really need at least 2 transponders At least 2 transponders needed A transponder to the side and another behind the ROV The 90 angle of cut gives us the perfect error ellipse


24 Sparse LBL aided INS as a field positioning system If we only have two transponders visible at any one point, then we can t run a traditional LBL baseline calibration To cover large areas, we d have a lot of boxins to do which consumes vessel time. That will take as long or longer than installing those transponders Lets go back to our LBL array and see if we can get away with using less transponders Gulf of Mexico 2013 Original LBL array comprises of 30 Compatts

25 The 30 Compatt LBL array The array offers; Good Geometry for calibration and tracking Has been adjusted using DTM terrain data to ensure line of sight

26 The 30 Compatt LBL array Centimetric positioning performance is achievable

27 The 30 Compatt LBL array Marginal detectable errors that could cause a position bust are negligible thanks to the redundancy of ranges associated with LBL

28 30 Compatts reduced to 15 First attempt to create a sparse array 30 Compatts down to 15

29 The 15 Compatt LBL array The array still appears strong and can be baseline calibrated

30 The 15 Compatt LBL array Centimetric positioning performance is still achievable

31 The 15 Compatt LBL array However marginal detectable errors could cause a position bust of 1m which would go undetected!!!

32 An 18 Compatt LBL array The array is increased from 15 to 18 Compatts

33 The 18 Compatt LBL array Centimetric positioning performance is still achievable

34 The 18 Compatt LBL array Now the marginal detectable errors are within positional requirements. The array has gone from 30 to 18 transponders That s 40% less
35 LBL aided INS equals high update rates and smooth tracking During the project, the sparse LBL aided INS position provided comparable positions to that of full LBL INS = BLUE LBL = GREEN The INS provided a much smoother and higher update track and continued when LBL reference was lost or degraded
36 LBL aided INS - The Good and the Bad GOOD Accurate & precise Works in all water depths Redundancy / Robust Availability of trained operators Sparse LBL aided INS Not so good Time to install & transponder day rate Update rate / time for average fix



37 Sparse LBL aided INS - CONCLUSIONS Single transponder/range sparse LBL is possible but not reccomended for survey as position errors can go unnoticed Sonardynes support network can help you with both planning, training & offshore support to ensure your projects will be successful.

38 Sparse LBL aided INS - CONCLUSIONS INS makes an ideal contribution to full LBL whereby we can; 1. Reduce transponder numbers by approx 50% saving vessel time and transponder day rate yet still calibrate for near LBL performance 2. Maintain the redundancy and low risk positioning offered by LBL 3. Provide a faster update rate and track during acoustic drop outs. QUESTIONS? + +
39 Answer to a question on achievable accuracies What is the achievable accuracy of sparse LBL aided INS? Entirely dependant on the positional accuracy of the reference transponders used and all the system errors (Boxins, Ranges, Sound Speed, DVL, Depth, etc). If you are using a suitable number/geometry of accurate reference transponders, accurate ranges with diagnostics (Wideband2) and all errors are removed as best as possible, then you could achieve positioning near to a well calibrated LBL array. INS cannot improve the position derived from poor reference transponder positions (weak LBL arrays) i.e. it will not fix a bad LBL array or poor boxed in reference transponder.
40 Head Office Sonardyne International Limited T. +44 (0) Blackbushe Business Park F. +44 (0) Yateley, Hampshire, GU46 6GD E. United Kingdom
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY
 THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
An Assessment of Quality in Underwater Archaeological Surveys Using Tape Measurements
 An Assessment of Quality in Underwater Archaeological Surveys Using Tape Measurements Peter Holt 3H Consulting Ltd, 6 Honcray, Oreston, Plymouth, Devon, PL9 9XB The quality of a typical underwater archaeological
An Assessment of Quality in Underwater Archaeological Surveys Using Tape Measurements Peter Holt 3H Consulting Ltd, 6 Honcray, Oreston, Plymouth, Devon, PL9 9XB The quality of a typical underwater archaeological
ATION TITLE. Survey QC, Decision Making, and a Modest Proposal for Error Models. Marc Willerth, MagVAR
 1 a Modest Proposal for Error Models ATION TITLE Marc Willerth, MagVAR Speaker Information Marc Willerth VP of Survey Technologies April 11, 2018 MagVAR 2 Speaker Bio Marc Willerth Magnetic Variation Services,
1 a Modest Proposal for Error Models ATION TITLE Marc Willerth, MagVAR Speaker Information Marc Willerth VP of Survey Technologies April 11, 2018 MagVAR 2 Speaker Bio Marc Willerth Magnetic Variation Services,
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Wade Reynolds 1 Frank Young 1,2 Peter Gibbings 1,2. University of Southern Queensland Toowoomba 4350 AUSTRALIA
 A Comparison of Methods for Mapping Golf Greens Wade Reynolds 1 Frank Young 1,2 Peter Gibbings 1,2 1 Faculty of Engineering and Surveying 2 Australian Centre for Sustainable Catchments University of Southern
A Comparison of Methods for Mapping Golf Greens Wade Reynolds 1 Frank Young 1,2 Peter Gibbings 1,2 1 Faculty of Engineering and Surveying 2 Australian Centre for Sustainable Catchments University of Southern
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle
 Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
An assessment of quality in underwater archaeological surveys using tape measurements
 The International Journal of Nuuticul Archaeology (2003) 32.2: 246-25 1 doi: 10.1016/j.ijna.2003.04.002 W An assessment of quality in underwater archaeological surveys using tape measurements Peter Holt
The International Journal of Nuuticul Archaeology (2003) 32.2: 246-25 1 doi: 10.1016/j.ijna.2003.04.002 W An assessment of quality in underwater archaeological surveys using tape measurements Peter Holt
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
Fault Diagnosis based on Particle Filter - with applications to marine crafts
 1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Products and Services HR3D, AUV3D
 Products and Services HR3D, AUV3D Multi-streamer Short Offset High Resolution 3D Seismic Acquisition Peter Sack Tor Haugland Sound Oceanics, LLC Houston, Texas USA 15 March 2012 Background Petromar V West
Products and Services HR3D, AUV3D Multi-streamer Short Offset High Resolution 3D Seismic Acquisition Peter Sack Tor Haugland Sound Oceanics, LLC Houston, Texas USA 15 March 2012 Background Petromar V West
One of the most important gauges on the panel is
 stick & rudder flight advisor Is Your Airspeed Indicator Honest? An accuracy how-to H.C. SKIP SMITH One of the most important gauges on the panel is the airspeed indicator. This is particularly true if
stick & rudder flight advisor Is Your Airspeed Indicator Honest? An accuracy how-to H.C. SKIP SMITH One of the most important gauges on the panel is the airspeed indicator. This is particularly true if
OFFICIAL MESSAGE CIRCULAR
 OFFICIAL MESSAGE CIRCULAR From: NI/ DP Department Number: 010/2012 Date: 20.12.2012 Number of pages: 7 To: Dynamic Positioning Accredited Training Centres Cc: DPTEG members Referent to: Aims and Objectives
OFFICIAL MESSAGE CIRCULAR From: NI/ DP Department Number: 010/2012 Date: 20.12.2012 Number of pages: 7 To: Dynamic Positioning Accredited Training Centres Cc: DPTEG members Referent to: Aims and Objectives
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
APOS LBL and MULBL Course
 Training Manual APOS LBL and MULBL Course Sections 1 Course descriptions, details, evaluation etc. 2 LBL introduction 3 Planning a LBL array 4 LBL runtime calibration 5 The screen and views 6 LBL Properties
Training Manual APOS LBL and MULBL Course Sections 1 Course descriptions, details, evaluation etc. 2 LBL introduction 3 Planning a LBL array 4 LBL runtime calibration 5 The screen and views 6 LBL Properties
1 st Tidal and Water Level Working Group Meeting DHN, Niteroi, Brazil 31/03/09 02/04/09 Vertical Offshore Reference Framework (VORF) Chris Jones
 Chris Jones") 1 st Tidal and Water Level Working Group Meeting DHN, Niteroi, Brazil 31/03/09 02/04/09 Vertical Offshore Reference Framework (VORF) Chris Jones United Kingdom Hydrographic Office Presentation Structure
1 st Tidal and Water Level Working Group Meeting DHN, Niteroi, Brazil 31/03/09 02/04/09 Vertical Offshore Reference Framework (VORF) Chris Jones United Kingdom Hydrographic Office Presentation Structure
MOTUS Wave Buoys. Powered By the Aanderaa MOTUS Directional Wave Sensor
 MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
GNSS Technology for the Determination of Real-Time Tidal Information
 GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
GNSS Technology for the Determination of Real-Time Tidal Information Benjamin Kidder C-Nav Positioning Solutions European region Outline of Topics Covered Introduction to Tides Past and Present Methods
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico.
 Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
OPERATIONS SEAFARER CERTIFICATION GUIDANCE NOTE SA MARITIME QUALIFICATIONS CODE. Deck: Chart Work
 Page 1 of 6 Compiled by Approved by Chief Examiner Syllabus Committee: 26 February 2013 OPERATIONS SEAFARER CERTIFICATION GUIDANCE NOTE SA MARITIME QUALIFICATIONS CODE Deck: Chart Work Page 2 of 6 COLUMN
Page 1 of 6 Compiled by Approved by Chief Examiner Syllabus Committee: 26 February 2013 OPERATIONS SEAFARER CERTIFICATION GUIDANCE NOTE SA MARITIME QUALIFICATIONS CODE Deck: Chart Work Page 2 of 6 COLUMN
Sailing Blind: The Challenges of a Submarine's Navigator
 Sailing Blind: The Challenges of a Submarine's Navigator John Clark, Physics Teacher and Military Historian, Deltona HS, Deltona 2012 Naval Historical Foundation STEM-H Teacher Fellowship Instructional
Sailing Blind: The Challenges of a Submarine's Navigator John Clark, Physics Teacher and Military Historian, Deltona HS, Deltona 2012 Naval Historical Foundation STEM-H Teacher Fellowship Instructional
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
BASELINE SURVEY, VISUAL - SITE SPECIFIC
 BASELINE SURVEY, VISUAL - SITE SPECIFIC Introduction As stated in SEPA s policy and in the Fish Farm Manual (1998), scientific data are required by SEPA in order to assess the existing condition on the
BASELINE SURVEY, VISUAL - SITE SPECIFIC Introduction As stated in SEPA s policy and in the Fish Farm Manual (1998), scientific data are required by SEPA in order to assess the existing condition on the
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President
 Orientation By: Nick Lowell, Founder & President") Lowell Instruments Application Note #TCMA Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President 1 Introduction The TCM-1 Tilt Current Meter (TCM)
Lowell Instruments Application Note #TCMA Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President 1 Introduction The TCM-1 Tilt Current Meter (TCM)
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS
 INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Polatrak ROV II - Tip Contact Probe Operation Manual
 This PDF document contains Live Web Links Click them for more information from the web Polatrak ROV II - Tip Contact Probe Operation Manual A Cathodic Protection Probe with dual Ag/AgCl reference cells
This PDF document contains Live Web Links Click them for more information from the web Polatrak ROV II - Tip Contact Probe Operation Manual A Cathodic Protection Probe with dual Ag/AgCl reference cells
A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING
 A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING By Marian Copilet, Durham Pipeline Technology Ltd., Gateshead, UK & Prof. Ernie Appleton, University of Durham 1. ABSTRACT This paper discusses
A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING By Marian Copilet, Durham Pipeline Technology Ltd., Gateshead, UK & Prof. Ernie Appleton, University of Durham 1. ABSTRACT This paper discusses
EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY
 18 th World Conference on Non destructive Testing, 16-20 April 2012, Durban, South Africa EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY Arno VOLKER 1 and Hendrik VOS 1 TNO, Stieltjesweg 1,
18 th World Conference on Non destructive Testing, 16-20 April 2012, Durban, South Africa EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY Arno VOLKER 1 and Hendrik VOS 1 TNO, Stieltjesweg 1,
Real Time Surveying GPS and HYDRO Software for Tide and Swell Compensation
 Real Time Surveying GPS and HYDRO Software for Tide and Swell Compensation by Mr Michael Walker, B.Surv. (Otago) HYDRO Division Trimble Navigation New Zealand Ltd. Abstract This paper focuses on the use
Real Time Surveying GPS and HYDRO Software for Tide and Swell Compensation by Mr Michael Walker, B.Surv. (Otago) HYDRO Division Trimble Navigation New Zealand Ltd. Abstract This paper focuses on the use
An experimental validation of a robust controller on the VAIMOS autonomous sailboat. Fabrice LE BARS
 An experimental validation of a robust controller on the VAIMOS autonomous sailboat Fabrice LE BARS Outline Introduction VAIMOS, an autonomous sailboat for oceanography Autonomy / control Theoretical validation
An experimental validation of a robust controller on the VAIMOS autonomous sailboat Fabrice LE BARS Outline Introduction VAIMOS, an autonomous sailboat for oceanography Autonomy / control Theoretical validation
OFFSHORE SURVEY IN DEVELOPMENT PROJECTS. Ian Douglas Head, Offshore Surveys, Shell Projects & Technology Europe
 OFFSHORE SURVEY IN DEVELOPMENT PROJECTS Ian Douglas Head, Offshore Surveys, Shell Projects & Technology Europe THE PROJECT: GOLDENEYE GOLDENEYE FACTS ST. FERGUS GOLDENEYE PLATFORM Gas Condensate Field
OFFSHORE SURVEY IN DEVELOPMENT PROJECTS Ian Douglas Head, Offshore Surveys, Shell Projects & Technology Europe THE PROJECT: GOLDENEYE GOLDENEYE FACTS ST. FERGUS GOLDENEYE PLATFORM Gas Condensate Field
Cygnus Underwater. UT Meters & Spare Parts Sales. Searchwise Aberdeen Ltd Unit 6, Broomiesburn, Ellon Ind Estate, Ellon, Aberdeenshire, UK, AB41 9RD
 Cygnus Underwater UT Meters & Spare Parts Sales The Cygnus Underwater is the original diver held subsea multiple echo Ultrasonic Thickness Gauge. It was designed for use by divers undertaking subsea maintenance
Cygnus Underwater UT Meters & Spare Parts Sales The Cygnus Underwater is the original diver held subsea multiple echo Ultrasonic Thickness Gauge. It was designed for use by divers undertaking subsea maintenance
Protection for Vessels Engaged in Servicing Submarine Cables
 Protection for Vessels Engaged in Servicing Submarine Cables Proposed Amendments to COLREGS Brief to Navigation Safety Advisory Council November 28, 2012 Tampa, FL Dr. Ronald J. Rapp TE SubCom and Representing
Protection for Vessels Engaged in Servicing Submarine Cables Proposed Amendments to COLREGS Brief to Navigation Safety Advisory Council November 28, 2012 Tampa, FL Dr. Ronald J. Rapp TE SubCom and Representing
Making waves through turbulent times
 Making waves through turbulent times Durham Shaun Heywood June 9, 2011 Contents 1. Section 1 Supply How the fleet is changing Where have all the newbuilds gone? 2. Section 2 Demand The drivers behind the
Making waves through turbulent times Durham Shaun Heywood June 9, 2011 Contents 1. Section 1 Supply How the fleet is changing Where have all the newbuilds gone? 2. Section 2 Demand The drivers behind the
LX Compass module 3 Electronic compass device User manual
 LX Compass module 3 Electronic compass device User manual LX navigation d.o.o., Tkalska 10 SLO 3000 Celje, tel: + 386 3 490 46 70, fax: + 386 3 490 46 71 info@lxnavigation.si, http://www.lxnavigation.com
LX Compass module 3 Electronic compass device User manual LX navigation d.o.o., Tkalska 10 SLO 3000 Celje, tel: + 386 3 490 46 70, fax: + 386 3 490 46 71 info@lxnavigation.si, http://www.lxnavigation.com
SpeedMax White Paper. Dynastream Innovations Inc. 228 River Avenue Cochrane, AB T4C 2C1. p f
 SpeedMax White Paper 228 River Avenue Cochrane, AB T4C 2C1 www.dynastream.com p 403.932.9292 f 403.932.6521 1 OVERVIEW Established in 1998, has world-leading expertise in the research and development of
SpeedMax White Paper 228 River Avenue Cochrane, AB T4C 2C1 www.dynastream.com p 403.932.9292 f 403.932.6521 1 OVERVIEW Established in 1998, has world-leading expertise in the research and development of
Aasta Hansteen. Operational Experiences. FFU Seminar 28 th January Tom-Erik Henriksen
 Aasta Hansteen Operational Experiences FFU Seminar 28 th January 2016 Tom-Erik Henriksen Agenda Introduction to Aasta Hansteen Main Challenges & Risks Operational Experiences - 2015 Campaigns 2 seabed-to-surface
Aasta Hansteen Operational Experiences FFU Seminar 28 th January 2016 Tom-Erik Henriksen Agenda Introduction to Aasta Hansteen Main Challenges & Risks Operational Experiences - 2015 Campaigns 2 seabed-to-surface
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office
 S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
STATIONKEEPING DYNAMIC POSITIONING FOR YACHTS. Hans Cozijn
 STATIONKEEPING DYNAMIC POSITIONING FOR YACHTS Hans Cozijn Senior Project Manager Offshore YACHTS VS. OFFSHORE INDUSTRY 2 YACHTS VS. OFFSHORE INDUSTRY Source : www.hdmt21.com Source : www.charterworld.com
STATIONKEEPING DYNAMIC POSITIONING FOR YACHTS Hans Cozijn Senior Project Manager Offshore YACHTS VS. OFFSHORE INDUSTRY 2 YACHTS VS. OFFSHORE INDUSTRY Source : www.hdmt21.com Source : www.charterworld.com
Dynamic Positioning Control Augmentation for Jack-up Vessels
 DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Full scale VIV response measurements of a drill pipe in Gulf of Mexico loop currents (OMAE )
") Full scale VIV response measurements of a drill pipe in Gulf of Mexico loop currents (OMAE2008-57610) Beynet, Shilling, Campbell, Tellier, Howells Estoril Portugal - June 2008 The Test September 2004 Test
Full scale VIV response measurements of a drill pipe in Gulf of Mexico loop currents (OMAE2008-57610) Beynet, Shilling, Campbell, Tellier, Howells Estoril Portugal - June 2008 The Test September 2004 Test
DISTANCE MEASUREMENT
 DISTANCE MEASUREMENT Distance Definition: The horizontal distance between two points. In ground surveys even though many angles may be read, the length of at least one line must be measured to supplement
DISTANCE MEASUREMENT Distance Definition: The horizontal distance between two points. In ground surveys even though many angles may be read, the length of at least one line must be measured to supplement
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004
 Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Learn more at
 STRIDE JIP Phase III SUT Talk 15th November 2 Offshore VIV monitoring (vortex induced vibration) Catenary riser interaction with deepwater seabeds 3 Full Scale Riser Monitoring To get real measurements
STRIDE JIP Phase III SUT Talk 15th November 2 Offshore VIV monitoring (vortex induced vibration) Catenary riser interaction with deepwater seabeds 3 Full Scale Riser Monitoring To get real measurements
BUYER S GUIDE AQUAlogger 530WTD
 OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
Marine Technology Society
 Marine Technology Society Dynamic Positioning Conference 21-22 October, 1997 Session 3 Operator Training Dynamic Positioning Familiarization Course By: Greg Navarre Global Marine (Houston) Session Planner
Marine Technology Society Dynamic Positioning Conference 21-22 October, 1997 Session 3 Operator Training Dynamic Positioning Familiarization Course By: Greg Navarre Global Marine (Houston) Session Planner
DUALEM EM EQUIPMENT. Geostudi Astier srl Via Nicolodi, Livorno Italy
 DUALEM EM EQUIPMENT DUALEM instruments (e.g. the DUALEM-1) incorporate a DUALEM sensor as well as an internal WAAS-enabled GPS receiver, a hand-held weatherproof display/keypad/power-supply, a carrying
DUALEM EM EQUIPMENT DUALEM instruments (e.g. the DUALEM-1) incorporate a DUALEM sensor as well as an internal WAAS-enabled GPS receiver, a hand-held weatherproof display/keypad/power-supply, a carrying
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES
 ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
Marine Technology Society
 Marine Technology Society Dynamic Positioning Conference 21-22 October, 1997 Session 3 Operator Training Induction Course By: Greg Navarre Global Marine (Houston) Session Planner Greg Navarre Global Marine
Marine Technology Society Dynamic Positioning Conference 21-22 October, 1997 Session 3 Operator Training Induction Course By: Greg Navarre Global Marine (Houston) Session Planner Greg Navarre Global Marine
Product highlights Variable frequency and thrust
 Innovative engineering for extreme global environments FT550 - VIBROCORER The 3rd generation FT550 lightweight variable frequency high power vibrocorer leads the market in its technical innovation and
Innovative engineering for extreme global environments FT550 - VIBROCORER The 3rd generation FT550 lightweight variable frequency high power vibrocorer leads the market in its technical innovation and
Multibeam and Laser: Combined High Resolution. Hydrographic Surveying for Civil Engineering Project Support
 Multibeam and Laser: Combined High Resolution Hydrographic Surveying for Civil Engineering Project Support John Dillon-Leetch,Port of London Authority Duncan Mallace, NetSurvey, UK Overview Introduction
Multibeam and Laser: Combined High Resolution Hydrographic Surveying for Civil Engineering Project Support John Dillon-Leetch,Port of London Authority Duncan Mallace, NetSurvey, UK Overview Introduction
Making AUVs Truly Autonomous
 Making AUVs Truly Autonomous Per Espen Hagen 1, Øyvind Hegrenæs 1, Bjørn Jalving 1, Øivind Midtgaard 2, Martin Wiig 2 and Ove Kent Hagen 2 1 Kongsberg Maritime 2 Norwegian Defence Research Establishment
Making AUVs Truly Autonomous Per Espen Hagen 1, Øyvind Hegrenæs 1, Bjørn Jalving 1, Øivind Midtgaard 2, Martin Wiig 2 and Ove Kent Hagen 2 1 Kongsberg Maritime 2 Norwegian Defence Research Establishment
NALSA REGULATIONS FOR RECORD ATTEMPTS
 NALSA REGULATIONS FOR RECORD ATTEMPTS Revision 3 July 2010 Overview: These regulations have been updated for top speed attempts for landyachts, iceboats and other hard surface, wind powered craft including
NALSA REGULATIONS FOR RECORD ATTEMPTS Revision 3 July 2010 Overview: These regulations have been updated for top speed attempts for landyachts, iceboats and other hard surface, wind powered craft including
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
Step Detection Algorithm For Accurate Distance Estimation Using Dynamic Step Length
 Step Detection Algorithm For Accurate Distance Estimation Using Dynamic Step Length Ahmad Abadleh ahmad_a@mutah.edu.jo Eshraq Al-Hawari eshraqh@mutah.edu.jo Esra'a Alkafaween Esra_ok@mutah.edu.jo Hamad
Step Detection Algorithm For Accurate Distance Estimation Using Dynamic Step Length Ahmad Abadleh ahmad_a@mutah.edu.jo Eshraq Al-Hawari eshraqh@mutah.edu.jo Esra'a Alkafaween Esra_ok@mutah.edu.jo Hamad
Spatial Methods for Road Course Measurement
 Page 1 of 10 CurtinSearch Curtin Site Index Contact Details Links LASCAN Spatial Sciences WA Centre for Geodesy COURSE MEASUREMENT This page is a summary of results of some of the research we have recently
Page 1 of 10 CurtinSearch Curtin Site Index Contact Details Links LASCAN Spatial Sciences WA Centre for Geodesy COURSE MEASUREMENT This page is a summary of results of some of the research we have recently
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane
 Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar
 Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar Lisa Nicole Brisson, Lead Bathymetry Product Engineer, EdgeTech, Boca Raton, FL Damon Wolfe, Lead Bathymetry Sales Engineer, EdgeTech,
Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar Lisa Nicole Brisson, Lead Bathymetry Product Engineer, EdgeTech, Boca Raton, FL Damon Wolfe, Lead Bathymetry Sales Engineer, EdgeTech,
Look Up! Positioning-based Pedestrian Risk Awareness. Shubham Jain
 Look Up! Positioning-based Pedestrian Risk Awareness Shubham Jain Does this look familiar? Pedestrians account for 14% of all traffic fatalities in the US *. In the last decade, 688,000 pedestrians injured
Look Up! Positioning-based Pedestrian Risk Awareness Shubham Jain Does this look familiar? Pedestrians account for 14% of all traffic fatalities in the US *. In the last decade, 688,000 pedestrians injured
Shot-by-shot directional source deghosting and directional designature using near-gun measurements
 H1-1-3 Shot-by-shot directional source deghosting and directional designature using near-gun measurements Neil Hargreaves, Rob Telling, Sergio Grion Dolphin Geophysical, London, UK Introduction In this
H1-1-3 Shot-by-shot directional source deghosting and directional designature using near-gun measurements Neil Hargreaves, Rob Telling, Sergio Grion Dolphin Geophysical, London, UK Introduction In this
PowerStroke TM Operating Instructions. November 2015 PROTECTED BY ONE OR MORE OF THE FOLLOWING US PATENTS 7,387,029; 7,377,180; D528,451
 PowerStroke TM Operating Instructions November 2015 PROTECTED BY ONE OR MORE OF THE FOLLOWING US PATENTS 7,387,029; 7,377,180; D528,451 NOTE: THESE INSTRUCTIONS ARE TO BE USED IN CONJUNCTION ISAAC SOFTWARE
PowerStroke TM Operating Instructions November 2015 PROTECTED BY ONE OR MORE OF THE FOLLOWING US PATENTS 7,387,029; 7,377,180; D528,451 NOTE: THESE INSTRUCTIONS ARE TO BE USED IN CONJUNCTION ISAAC SOFTWARE
Adaptive context-agnostic floor transition detection on smart mobile devices
 Adaptive context-agnostic floor transition detection on smart mobile devices Salvatore Vanini University of Applied Sciences of Southern Switzerland (SUPSI) salvatore.vanini@supsi.ch CoMoRea Workshop -
Adaptive context-agnostic floor transition detection on smart mobile devices Salvatore Vanini University of Applied Sciences of Southern Switzerland (SUPSI) salvatore.vanini@supsi.ch CoMoRea Workshop -
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
ITTC Recommended Procedures and Guidelines
 Page 1 of 6 Table of Contents 1. PURPOSE...2 2. PARAMETERS...2 2.1 General Considerations...2 3 DESCRIPTION OF PROCEDURE...2 3.1 Model Design and Construction...2 3.2 Measurements...3 3.5 Execution of
Page 1 of 6 Table of Contents 1. PURPOSE...2 2. PARAMETERS...2 2.1 General Considerations...2 3 DESCRIPTION OF PROCEDURE...2 3.1 Model Design and Construction...2 3.2 Measurements...3 3.5 Execution of
Precision Rotary Ball Screw
 57E Precision Rotary Ball Screw Models DIR and BLR Outer ring Ball screw nut Deflector Section A Screw shaft Spacer Seal Collar Ball End cap Retainer End cap Ball Screw shaft Outer ring Structure of Standard-Lead
57E Precision Rotary Ball Screw Models DIR and BLR Outer ring Ball screw nut Deflector Section A Screw shaft Spacer Seal Collar Ball End cap Retainer End cap Ball Screw shaft Outer ring Structure of Standard-Lead
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
IMPLEMENT GUIDANCE SYSTEMS
 IMPLEMENT GUIDANCE SYSTEMS KEEPING PULLED EQUIPMENT ON TRACK Satellite navigation systems on tractors keep the tractor on track - but they cannot always address the challenge of keeping the equipment that
IMPLEMENT GUIDANCE SYSTEMS KEEPING PULLED EQUIPMENT ON TRACK Satellite navigation systems on tractors keep the tractor on track - but they cannot always address the challenge of keeping the equipment that
A Distributed Control System using CAN bus for an AUV
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
Integration of time-lapse seismic and production data in a Gulf of Mexico gas field
 Integration of time-lapse seismic and production data in a Gulf of Mexico gas field XURI HUANG, ROBERT WILL, MASHIUR KHAN, and LARRY STANLEY, WesternGeco, Houston, Texas, U.S. A pilot study was initiated
Integration of time-lapse seismic and production data in a Gulf of Mexico gas field XURI HUANG, ROBERT WILL, MASHIUR KHAN, and LARRY STANLEY, WesternGeco, Houston, Texas, U.S. A pilot study was initiated
Trial of a process to estimate depth of cover on buried pipelines
 Trial of a process to estimate depth of cover on buried pipelines Daniel Finley (CEng MIMechE) Principal Engineer ROSEN Group Third Party Interference Protection against 3rd party interference can be an
Trial of a process to estimate depth of cover on buried pipelines Daniel Finley (CEng MIMechE) Principal Engineer ROSEN Group Third Party Interference Protection against 3rd party interference can be an
BAPI Pressure Line of Products - FAQs
 Table of Contents 1. Several manufacturers produce pressure transmitters, why should I purchase from BAPI?... p. 2 2. BAPI makes several styles of pressure transmitters. What are the features of each?...
Table of Contents 1. Several manufacturers produce pressure transmitters, why should I purchase from BAPI?... p. 2 2. BAPI makes several styles of pressure transmitters. What are the features of each?...
IMCA DP Station Keeping Bulletin 04/18 November 2018
 DP STATION KEEPING BULLETIN IMCA DP Station Keeping Bulletin 04/18 November 2018 The following event trees have been compiled from recent reports received by IMCA. The originators granted IMCA permission
DP STATION KEEPING BULLETIN IMCA DP Station Keeping Bulletin 04/18 November 2018 The following event trees have been compiled from recent reports received by IMCA. The originators granted IMCA permission
Naval Postgraduate School, Operational Oceanography and Meteorology. Since inputs from UDAS are continuously used in projects at the Naval
 How Accurate are UDAS True Winds? Charles L Williams, LT USN September 5, 2006 Naval Postgraduate School, Operational Oceanography and Meteorology Abstract Since inputs from UDAS are continuously used
How Accurate are UDAS True Winds? Charles L Williams, LT USN September 5, 2006 Naval Postgraduate School, Operational Oceanography and Meteorology Abstract Since inputs from UDAS are continuously used
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Interim Operating Procedures for SonTek RiverSurveyor M9/S5
 Hydroacoustics Technical Working Group: Task 2.3 Fully operationalize auto-adapting ADCPs Interim Operating Procedures for SonTek RiverSurveyor M9/S5 P Campbell, E. Jamieson, F Rainville, A Du Cap, 2014
Hydroacoustics Technical Working Group: Task 2.3 Fully operationalize auto-adapting ADCPs Interim Operating Procedures for SonTek RiverSurveyor M9/S5 P Campbell, E. Jamieson, F Rainville, A Du Cap, 2014
Rolled Rotary Ball Screw
 51E Rolled Rotary Ball Screw Model BLR End cap Collar Seal Spacer Ball End cap Screw shaft Outer ring Ball screw nut Retainer Outer ring Ball Fig.1 Structure of Large Lead Rotary Nut Ball Screw Model BLR
51E Rolled Rotary Ball Screw Model BLR End cap Collar Seal Spacer Ball End cap Screw shaft Outer ring Ball screw nut Retainer Outer ring Ball Fig.1 Structure of Large Lead Rotary Nut Ball Screw Model BLR
Hammer Technical Model
 Hammer Technical Model Progression related to Multi-Events Development (aged 8/9-12 years) can be referenced to Athletics 365 More technical information can be found HERE IAAF CECS Level II Event Specific
Hammer Technical Model Progression related to Multi-Events Development (aged 8/9-12 years) can be referenced to Athletics 365 More technical information can be found HERE IAAF CECS Level II Event Specific
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Viva TPS. TS11/15 Total Stations Check and Adjust Procedure. October Summary
 Viva TPS October 2010 TS11/15 Total Stations Summary Leica builds total stations to the highest quality and calibrates each instrument before it leaves the Factory. After the instrument is shipped or used
Viva TPS October 2010 TS11/15 Total Stations Summary Leica builds total stations to the highest quality and calibrates each instrument before it leaves the Factory. After the instrument is shipped or used
Orthometric Height Determination Using GPS in East Antarctica
 Tenth Indian Expedition to Antarctica, Scientific Report, 1995 Department of Ocean Development, Technical Publication No. 8, pp. 145-150 Orthometric Height Determination Using GPS in East Antarctica V.
Tenth Indian Expedition to Antarctica, Scientific Report, 1995 Department of Ocean Development, Technical Publication No. 8, pp. 145-150 Orthometric Height Determination Using GPS in East Antarctica V.
Isis Deployment. TMS and Live Boating. Inmartech08. Dave Turner Operations Co-ordinator.
 Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Near-bottom Multibeam Surveys for Deep Sea Scientific Applications
 Near-bottom Multibeam Surveys for Deep Sea Scientific Applications Scott J. McCue Dana R. Yoerger Dept of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543
Near-bottom Multibeam Surveys for Deep Sea Scientific Applications Scott J. McCue Dana R. Yoerger Dept of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543
METHODS EMPLOYED IN LOCATING SOUNDINGS
 METHODS EMPLOYED IN LOCATING SOUNDINGS The soundings are located with reference to the shore traverse by observations made (i) entirely from the boat, (ii) entirely from the shore or (iii) from both. The
METHODS EMPLOYED IN LOCATING SOUNDINGS The soundings are located with reference to the shore traverse by observations made (i) entirely from the boat, (ii) entirely from the shore or (iii) from both. The
CALCULATING IN-FLIGHT WINDS
 CALCULATING IN-FLIGHT WINDS SITUATION: The TH of your aircraft is 350 with the TAS of 150 kts. GS has been determined to be 160 kts, and the Track is 355. What is the wind? ESTIMATE! First compare TAS
CALCULATING IN-FLIGHT WINDS SITUATION: The TH of your aircraft is 350 with the TAS of 150 kts. GS has been determined to be 160 kts, and the Track is 355. What is the wind? ESTIMATE! First compare TAS
Wave phenomena in a ripple tank
 Wave phenomena in a ripple tank LEP Related topics Generation of surface waves, propagation of surface waves, reflection of waves, refraction of waves, Doppler Effect. Principle Water waves are generated
Wave phenomena in a ripple tank LEP Related topics Generation of surface waves, propagation of surface waves, reflection of waves, refraction of waves, Doppler Effect. Principle Water waves are generated
Review and Classification of The Modern ROV
 Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Chromat Calibration Updated October 27th, 2017
 Chromat Calibration Updated October 27th, 2017 Calibrating the Chromatograph Performing the Chromat Calibration is highly recommended when starting a new well. The MLogger already has a default calibration
Chromat Calibration Updated October 27th, 2017 Calibrating the Chromatograph Performing the Chromat Calibration is highly recommended when starting a new well. The MLogger already has a default calibration
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping
 Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Shearwater GeoServices. Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist
 Shearwater GeoServices Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist Shearwater GeoServices - Full Geophysical Service Company Marine Processing
Shearwater GeoServices Increasing survey productivity and enhancing data quality February 2017 Steve Hepburn Acquisition Geophysicist Shearwater GeoServices - Full Geophysical Service Company Marine Processing
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Baselining of the 40mm Family of Ammunition
 Baselining of the 40mm Family of Ammunition James Grassi U.S. ARMY/RDECOM-ARDEC 40mm Grenade Ammunition Special Projects 973-724-5987 jgrassi@pica.army.mil 8 May 2007 AMTEC Corporation Overview Reason
Baselining of the 40mm Family of Ammunition James Grassi U.S. ARMY/RDECOM-ARDEC 40mm Grenade Ammunition Special Projects 973-724-5987 jgrassi@pica.army.mil 8 May 2007 AMTEC Corporation Overview Reason
Little Spokane River Stream Gage Report: Deadman Creek, Dragoon Creek, and the West Branch of the Little Spokane River
 Little Spokane River Stream Gage Report: Deadman Creek, Dragoon Creek, and the West Branch of the Little Spokane River June 2010 Spokane County Conservation District N. 210 Havana St. Spokane, WA 99202
Little Spokane River Stream Gage Report: Deadman Creek, Dragoon Creek, and the West Branch of the Little Spokane River June 2010 Spokane County Conservation District N. 210 Havana St. Spokane, WA 99202
Wind Farms and Fisheries: Some Commercial Solutions
 Fisheries Innovation Scotland Second Annual Fishing Conference 22 nd & 23 rd August 2016 Wind Farms and Fisheries: Some Commercial Solutions Patrick Franklin HOMARUS LTD Fishery and Aquaculture Specialists
Fisheries Innovation Scotland Second Annual Fishing Conference 22 nd & 23 rd August 2016 Wind Farms and Fisheries: Some Commercial Solutions Patrick Franklin HOMARUS LTD Fishery and Aquaculture Specialists
Users Group Conference 2018
 Users Group Conference 2018 Compressor Analysis Special Circumstances Tracy Wimberly Sr. Reciprocating Equipment Analyst, Windrock 1 Topics, top compressor questions Ultrasound Baseline Cat Eyes Leak Index
Users Group Conference 2018 Compressor Analysis Special Circumstances Tracy Wimberly Sr. Reciprocating Equipment Analyst, Windrock 1 Topics, top compressor questions Ultrasound Baseline Cat Eyes Leak Index
Chapter 9: Sea operations
 Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting