CC-Log: Drastically Reducing Storage Requirements for Robots Using Classification and Compression
|
|
|
- Brandon Brooks
- 5 years ago
- Views:
Transcription


1 CC-Log: Drastically Reducing Storage Requirements for Robots Using Classification and Compression Santiago Gonzalez, Vijay Chidambaram, Jivko Sinapov, and Peter Stone University of Texas at Austin 1
2 The Problem Robots have a growing number of increasingly sophisticated sensors Roboticists want to leverage this data to gain insights into system behavior High sampling rates and limited storage Storing everything is infeasible Have to let something go 2
3 Can we build a system to log only the data we need? 3
4 Can we build a system to log only the data we need? + figure out what data we need? 4
5 CC-Log A modular, event-centric logging solution for. Uses ML to decide whether saving data is required Greatly reduced logging storage requirements Lossless; fine grained sampling for logged events Fits into s modular architecture 5
6 Outline Background The CC-Log system Evaluation Systems challenges in robotics Concluding remarks 6
7 Outline Background The CC-Log system Evaluation Systems challenges in robotics Concluding remarks 7

8 BWIBot Building-Wide Intelligence Autonomous, mobile robots Roam for hours on a single charge Controlled by a PC running (Robot Operating System) 8
9 Robot Operating System () Node Topic Node Topic Ubuntu Python Drivers XPC Scheduling Hardware PC Hokuyo Laser Scanner Microsoft Kinect Motors 9
10 Robot Operating System () Node Topic Node Topic Ubuntu Python Drivers XPC Scheduling Hardware PC Hokuyo Laser Scanner Microsoft Kinect Motors 10
11 Robot Operating System () Node Topic Node Topic Ubuntu Python Drivers XPC Scheduling Hardware PC Hokuyo Laser Scanner Microsoft Kinect Motors 11
12 Robot Operating System () Node Topic Node Topic Ubuntu Python Drivers XPC Scheduling Hardware PC Hokuyo Laser Scanner Microsoft Kinect Motors 12
13 , topics, and messages? 13 * from simulation
14 What does data look like? header: seq: 5229 stamp: secs: 57 /odom topic nsecs: frame_id: odom child_frame_id: base_footprint pose: pose: position: x: y: z: 0.0 orientation: x: e-07 y: e-05 z: e-09 w: covariance: [1e-05, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1e-05, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, , 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, , 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, , 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.001] twist: twist: linear: x: e-12 y: e-12 z: 0.0 angular: x: 0.0 y: 0.0 z: e-10 covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0] 14
15 What does data look like? /odom topic {"twist": {"twist": {"linear": {"y": e-12, "x": e-12, "z": 0.0}, "angular": {"y": 0.0, "x": 0.0, "z": e-10}}, "covariance": [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]}, "header": {"secs": 55, "nsecs": , "seq": 5007}, "pose": {"pose": {"position": {"y": , "x": , "z": 0.0}, "orientation": {"y": e-05, "x": e-07, "z": e-09, "w": }}, "covariance": [1e-05, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1e-05, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, , 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, , 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, , 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.001]}} 15
16 Position Over Time t = 0s t = 63s 16
17 Orientation Over Time t = 0s t = 63s 17
18 Linear Twist Over Time t = 0s t = 63s 18
19 Angular Twist Over Time t = 0s t = 63s 19
20 Outline Background The CC-Log system Evaluation Systems challenges in robotics Concluding remarks 20
21 CC-Log Classification and Compression Use a machine learning classifier to determine whether the system is currently in an anomalous state Anomalies trigger logging of a window of data extending into the past and into the future Saved data is compressed to achieve further space savings 21
22 Window Sampling Log Window Time Sliding Window Past Samples Current Sample Future Samples Log Window provides flexible set of samples to log Sliding Window provides fixed set of samples for analysis 22
23 Window Sampling Log Window Time Sliding Window Past Samples Current Sample Future Samples Log Window can grow as samples are deemed anomalous using history in Sliding Window How do we know if a sample is anomalous? 23
24 Anomaly Classifier Want to determine if a datapoint is an outlier along a set of dimensions 100s to 1,000s of dimensions Anomaly detection has been used to great effect in numerous areas (e.g., structural integrity monitoring) CC-Log uses a 1-class RBF-SVM 24
25 Support Vector Machine (SVM) Find a maximally separating hyperplane between two sets of linearly separable data 25
26 Support Vector Machine (SVM) Find a maximally separating hyperplane between two sets of linearly separable data 26
27 Radial Basis Function (RBF) SVM The Kernel Trick: Find a separating surface between two sets of data by embedding into a higher dimensional implicit feature space 27

28 1-class RBF-SVM 28 graphic from Scikit-learn
29 CC-Log Operation 1 Full logging 2 Offline learning 3 Intelligent logging 29
30 CC-Log Architecture Contained within Segbot System Record Node Storage Sensors Sliding Window Topic Callback Build Feature Vec. Anomaly Detector Training Data Actuators Build Feature Vec. Data Formatter Window Trigger Validator Data Formatter Testing Data Logged Windows Continuous Log 30
31 CC-Log Architecture Contained within Segbot System Record Node Storage Sensors Sliding Window Topic Callback Build Feature Vec. Anomaly Detector Training Data Actuators Build Feature Vec. Data Formatter Window Trigger Validator Data Formatter Testing Data Logged Windows Continuous Log 31
32 CC-Log Architecture Contained within Segbot System Record Node Storage Sensors Sliding Window Topic Callback Build Feature Vec. Anomaly Detector Training Data Actuators Build Feature Vec. Data Formatter Window Trigger Validator Data Formatter Testing Data Logged Windows Continuous Log 32
33 1 Full logging Contained within Segbot System Record Node Storage Sensors Sliding Window Topic Callback Build Feature Vec. Anomaly Detector Training Data Actuators Build Feature Vec. Data Formatter Window Trigger Validator Data Formatter Testing Data Logged Windows Continuous Log 33
34 2 Offline learning Contained within Segbot System Record Node Storage Sensors Sliding Window Topic Callback Build Feature Vec. Anomaly Detector Training Data Actuators Build Feature Vec. Data Formatter Window Trigger Validator Data Formatter Testing Data Logged Windows Continuous Log 34
35 3 Intelligent logging Contained within Segbot System Record Node Storage Sensors Sliding Window Topic Callback Build Feature Vec. Anomaly Detector Training Data Actuators Build Feature Vec. Data Formatter Window Trigger Validator Data Formatter Testing Data Logged Windows Continuous Log 35
36 Implementation Dependency and setup challenges VM used extensively Tricky to get system fully integrated into Collecting data proved to be arduous
37 Outline Background The CC-Log system Evaluation Systems challenges in robotics Concluding remarks 37
38 Simulation Robot is shared resource, need lots of data Full featured simulation within, based on Gazebo Different notions of nominal behavior, subset of reality Can t simply train in simulation and test on physical robot Domain adaptation outside of project scope 38
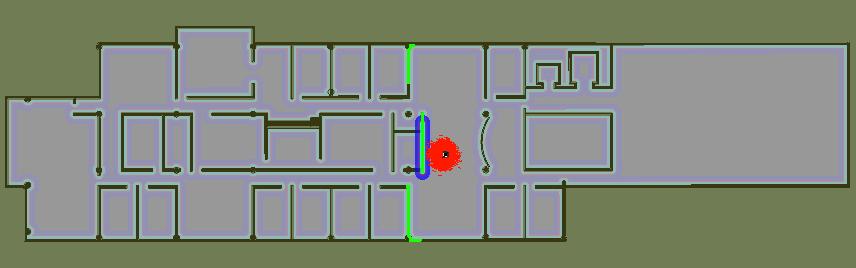
39 Simulation 39
40 In Silico Classifier Accuracy Training: 983 nominal Testing: 492 nominal, 20 anomalous 40
41 In Silico Classifier Accuracy Training: 983 nominal Testing: 492 nominal, 20 anomalous 41
42 In Silico Classifier Accuracy Training: 983 nominal Testing: 492 nominal, 20 anomalous Total Events 512 True Positives 20 False Positives 183 False Negatives 0 True Negatives
43 In Silico Classifier Accuracy Training: 983 nominal Testing: 492 nominal, 20 anomalous Total Events 512 True Positives 20 False Positives 183 False Negatives 0 True Negatives
44 Compression Schemes 44
45 Compression Schemes 45
46 Limitations Currently tailored for odometry data Adapting to real robot requires lots of clean running data Cannot capture aggregate data Simple classifier cannot fully capture certain intricacies Need more data Could be better served by HMM or LSTM based model 46
47 Future Work Collect more data and fine tune the classifier Incorporate more types of data into the system Course-grained continuous logging Integrate compressive sampling, such as RTV 47
48 Outline Background The CC-Log system Evaluation Systems challenges in robotics Concluding remarks 48
49 Scheduling Robots require more nuanced scheduling Data generated at different speeds Different nodes need to process data at different rates has very primitive scheduling
50 Lightweight Processes BWIBot has sluggish performance after some time Many concurrent nodes Each node is a process nodes are too heavy for long-running processes
51 Storage CC-Log solves one facet of the storage problem Other use cases may require stratified sampling to get aggregate statistics Security and privacy
52 Continuous Learning Want robots to be able to train models on-the-go Continuous learning poses unique challenges Data requirements change over time How much data is enough data?
53 Retrospective Tackled a problem in robotics from a systems perspective Simple techniques can be very powerful Robotics / systems collaborations are great Building a working system end-to-end in is somewhat difficult, collaboration should ameliorate this 53
54 Q&A Santiago Gonzalez 54
turtlebot_gazebo /opt/ros/kinetic/share/turtlebot_gazebo TurtleBot is about in the center x,y,z, roll, pitch, yaw Notice not 0,0,0,0,0,0
 02/05/18 2/06 Chapter 3 TurtleBot 1. Install Page 80 $ sudo apt-get install ros-kinetic-turtlebot ros-kinetic-turtlebot-apps ros-kinetic-turtlebot-interactions ros-kinetic-turtlebot-simulator roskinetic-kobuki-ftdi
02/05/18 2/06 Chapter 3 TurtleBot 1. Install Page 80 $ sudo apt-get install ros-kinetic-turtlebot ros-kinetic-turtlebot-apps ros-kinetic-turtlebot-interactions ros-kinetic-turtlebot-simulator roskinetic-kobuki-ftdi
PREDICTING the outcomes of sporting events
 CS 229 FINAL PROJECT, AUTUMN 2014 1 Predicting National Basketball Association Winners Jasper Lin, Logan Short, and Vishnu Sundaresan Abstract We used National Basketball Associations box scores from 1991-1998
CS 229 FINAL PROJECT, AUTUMN 2014 1 Predicting National Basketball Association Winners Jasper Lin, Logan Short, and Vishnu Sundaresan Abstract We used National Basketball Associations box scores from 1991-1998
09/29/18 Python Turtlesim & Turtlebot Examples Alienware
 09/29/18 Python Turtlesim & Turtlebot Examples Alienware 1. Locate Files: harman@d104-45931:~/desktop/turtlebot_python_scripts$ ls -la total 252 drwxrwxr-x 2 harman harman 4096 Sep 29 18:03. drwxr-xr-x
09/29/18 Python Turtlesim & Turtlebot Examples Alienware 1. Locate Files: harman@d104-45931:~/desktop/turtlebot_python_scripts$ ls -la total 252 drwxrwxr-x 2 harman harman 4096 Sep 29 18:03. drwxr-xr-x
Bayesian Optimized Random Forest for Movement Classification with Smartphones
 Bayesian Optimized Random Forest for Movement Classification with Smartphones 1 2 3 4 Anonymous Author(s) Affiliation Address email 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
Bayesian Optimized Random Forest for Movement Classification with Smartphones 1 2 3 4 Anonymous Author(s) Affiliation Address email 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
BASKETBALL PREDICTION ANALYSIS OF MARCH MADNESS GAMES CHRIS TSENG YIBO WANG
 BASKETBALL PREDICTION ANALYSIS OF MARCH MADNESS GAMES CHRIS TSENG YIBO WANG GOAL OF PROJECT The goal is to predict the winners between college men s basketball teams competing in the 2018 (NCAA) s March
BASKETBALL PREDICTION ANALYSIS OF MARCH MADNESS GAMES CHRIS TSENG YIBO WANG GOAL OF PROJECT The goal is to predict the winners between college men s basketball teams competing in the 2018 (NCAA) s March
Title: 4-Way-Stop Wait-Time Prediction Group members (1): David Held
: David Held") Title: 4-Way-Stop Wait-Time Prediction Group members (1): David Held As part of my research in Sebastian Thrun's autonomous driving team, my goal is to predict the wait-time for a car at a 4-way intersection.
Title: 4-Way-Stop Wait-Time Prediction Group members (1): David Held As part of my research in Sebastian Thrun's autonomous driving team, my goal is to predict the wait-time for a car at a 4-way intersection.
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud. Hydraulically Actuated Hexapod Robots. Design, Implementation. and Control.
 Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
An experimental validation of a robust controller on the VAIMOS autonomous sailboat. Fabrice LE BARS
 An experimental validation of a robust controller on the VAIMOS autonomous sailboat Fabrice LE BARS Outline Introduction VAIMOS, an autonomous sailboat for oceanography Autonomy / control Theoretical validation
An experimental validation of a robust controller on the VAIMOS autonomous sailboat Fabrice LE BARS Outline Introduction VAIMOS, an autonomous sailboat for oceanography Autonomy / control Theoretical validation
Evaluating and Classifying NBA Free Agents
 Evaluating and Classifying NBA Free Agents Shanwei Yan In this project, I applied machine learning techniques to perform multiclass classification on free agents by using game statistics, which is useful
Evaluating and Classifying NBA Free Agents Shanwei Yan In this project, I applied machine learning techniques to perform multiclass classification on free agents by using game statistics, which is useful
Cricket umpire assistance and ball tracking system using a single smartphone camera
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 Cricket umpire assistance and ball tracking system using a single smartphone camera Udit Arora
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 Cricket umpire assistance and ball tracking system using a single smartphone camera Udit Arora
Machine Learning an American Pastime
 Nikhil Bhargava, Andy Fang, Peter Tseng CS 229 Paper Machine Learning an American Pastime I. Introduction Baseball has been a popular American sport that has steadily gained worldwide appreciation in the
Nikhil Bhargava, Andy Fang, Peter Tseng CS 229 Paper Machine Learning an American Pastime I. Introduction Baseball has been a popular American sport that has steadily gained worldwide appreciation in the
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION Task and Rules Document
 NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
Virtual Breadboarding. John Vangelov Ford Motor Company
 Virtual Breadboarding John Vangelov Ford Motor Company What is Virtual Breadboarding? Uses Vector s CANoe product, to simulate MATLAB Simulink models in a simulated or real vehicle environment. Allows
Virtual Breadboarding John Vangelov Ford Motor Company What is Virtual Breadboarding? Uses Vector s CANoe product, to simulate MATLAB Simulink models in a simulated or real vehicle environment. Allows
PropaGator Autonomous Surface Vehicle
 PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
2017 SCRUM GUIDE CHANGES USES OF SCRUM (NEW SECTION) 2017 CONTENT CHANGES AND ADDITIONS
 2017 CONTENT CHANGES AND ADDITIONS") 2017 SCRUM GUIDE CHANGES In November 2017, Ken Schwaber and Jeff Sutherland, creators and authors of the Scrum Guide, made updates to the document. The changes, which include the addition of a new section
2017 SCRUM GUIDE CHANGES In November 2017, Ken Schwaber and Jeff Sutherland, creators and authors of the Scrum Guide, made updates to the document. The changes, which include the addition of a new section
Scrum Guide Revision
 November 2017 Scrum Guide Revision Jeff Sutherland Ken Schwaber Introduction Agenda How we have gotten here What has changed in the Scrum Guide Addressing common misconceptions A Little About Scrum Scrum
November 2017 Scrum Guide Revision Jeff Sutherland Ken Schwaber Introduction Agenda How we have gotten here What has changed in the Scrum Guide Addressing common misconceptions A Little About Scrum Scrum
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
GOLFER. The Golf Putting Robot
 GOLFER The Golf Putting Robot Written By Wing Pan Yuen For EEL 5666 Intelligent Machines Design Laboratory December 05, 1999 Table of Contents Abstract Introduction Executive Summary Integrated System
GOLFER The Golf Putting Robot Written By Wing Pan Yuen For EEL 5666 Intelligent Machines Design Laboratory December 05, 1999 Table of Contents Abstract Introduction Executive Summary Integrated System
Safety Systems Based on ND Pressure Monitoring
 ECNDT 2006 - oster 65 Safety Systems Based on ND ressure Monitoring Davor ZVIZDIC; Lovorka GRGEC BERMANEC, FSB-LM, Zagreb, Croatia Abstract. This paper investigates the scope of ND pressure monitoring
ECNDT 2006 - oster 65 Safety Systems Based on ND ressure Monitoring Davor ZVIZDIC; Lovorka GRGEC BERMANEC, FSB-LM, Zagreb, Croatia Abstract. This paper investigates the scope of ND pressure monitoring
The NXT Generation. A complete learning solution
 The NXT Generation A complete learning solution 2008 The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts
The NXT Generation A complete learning solution 2008 The NXT Generation LEGO MINDSTORMS Education is the latest in educational robotics, enabling students to discover ICT, science, D&T and maths concepts
Design of a Pedestrian Detection System Based on OpenCV. Ning Xu and Yong Ren*
 International Conference on Education, Management, Commerce and Society (EMCS 2015) Design of a Pedestrian Detection System Based on OpenCV Ning Xu and Yong Ren* Applied Technology College of Soochow University
International Conference on Education, Management, Commerce and Society (EMCS 2015) Design of a Pedestrian Detection System Based on OpenCV Ning Xu and Yong Ren* Applied Technology College of Soochow University
Queue analysis for the toll station of the Öresund fixed link. Pontus Matstoms *
 Queue analysis for the toll station of the Öresund fixed link Pontus Matstoms * Abstract A new simulation model for queue and capacity analysis of a toll station is presented. The model and its software
Queue analysis for the toll station of the Öresund fixed link Pontus Matstoms * Abstract A new simulation model for queue and capacity analysis of a toll station is presented. The model and its software
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Active Pedestrian Protection System, Project Review
 T_AP00966 Active Pedestrian Protection System, Project Review 2010. 10. 29 Ho Gi Jung The School of Electronic and Electrical Engineering Yonsei University, South Korea Project Overview Objectives To develop
T_AP00966 Active Pedestrian Protection System, Project Review 2010. 10. 29 Ho Gi Jung The School of Electronic and Electrical Engineering Yonsei University, South Korea Project Overview Objectives To develop
Robotic Billiards Tournament Robo-pool
 GEORGIA INSTITUTE OF TECHNOLOGY George W. Woodruff School of Mechanical Engineering ME 2110 - Creative Decisions and Design Studio 4 Big Design Project Robotic Billiards Tournament Robo-pool 1. INTRODUCTION
GEORGIA INSTITUTE OF TECHNOLOGY George W. Woodruff School of Mechanical Engineering ME 2110 - Creative Decisions and Design Studio 4 Big Design Project Robotic Billiards Tournament Robo-pool 1. INTRODUCTION
D-Case Modeling Guide for Target System
 D-Case Modeling Guide for Target System 1/32 Table of Contents 1 Scope...4 2 Overview of D-Case and SysML Modeling Guide...4 2.1 Background and Purpose...4 2.2 Target System of Modeling Guide...5 2.3 Constitution
D-Case Modeling Guide for Target System 1/32 Table of Contents 1 Scope...4 2 Overview of D-Case and SysML Modeling Guide...4 2.1 Background and Purpose...4 2.2 Target System of Modeling Guide...5 2.3 Constitution
Application Note AN-107
 SPEC Sensor TM Characterization & Calibration Considerations Scope This document is provided to describe the considerations needed to characterize, calibrate, verify and validate the measurement performance
SPEC Sensor TM Characterization & Calibration Considerations Scope This document is provided to describe the considerations needed to characterize, calibrate, verify and validate the measurement performance
FEATURES. Features. UCI Machine Learning Repository. Admin 9/23/13
 Admin Assignment 2 This class will make you a better programmer! How did it go? How much time did you spend? FEATURES David Kauchak CS 451 Fall 2013 Assignment 3 out Implement perceptron variants See how
Admin Assignment 2 This class will make you a better programmer! How did it go? How much time did you spend? FEATURES David Kauchak CS 451 Fall 2013 Assignment 3 out Implement perceptron variants See how
1. Task Definition. Automated Human Gait Recognition Ifueko Igbinedion, Ysis Tarter CS 229, Fall 2013
 Automated Human Gait Recognition Ifueko Igbinedion, Ysis Tarter CS 229, Fall 2013 1. Task Definition Motivation A reliable way of human identification is in high demand in today s society. There has been
Automated Human Gait Recognition Ifueko Igbinedion, Ysis Tarter CS 229, Fall 2013 1. Task Definition Motivation A reliable way of human identification is in high demand in today s society. There has been
IEEE RAS Micro/Nano Robotics & Automation (MNRA) Technical Committee Mobile Microrobotics Challenge 2016
 Technical Committee Mobile Microrobotics Challenge 2016") IEEE RAS Micro/Nano Robotics & Automation (MNRA) Technical Committee Mobile Microrobotics Challenge 2016 OFFICIAL RULES Version 2.0 December 15, 2015 1. THE EVENTS The IEEE Robotics & Automation Society
IEEE RAS Micro/Nano Robotics & Automation (MNRA) Technical Committee Mobile Microrobotics Challenge 2016 OFFICIAL RULES Version 2.0 December 15, 2015 1. THE EVENTS The IEEE Robotics & Automation Society
Predicting Momentum Shifts in NBA Games
 Predicting Momentum Shifts in NBA Games Whitney LaRow, Brian Mittl, Vijay Singh Stanford University December 11, 2015 1 Introduction During the first round of the 2015 NBA playoffs, the eventual champions,
Predicting Momentum Shifts in NBA Games Whitney LaRow, Brian Mittl, Vijay Singh Stanford University December 11, 2015 1 Introduction During the first round of the 2015 NBA playoffs, the eventual champions,
Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016
 Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016 Peter Yu, Fangzhou Xia, Ryan Fish, Kamal Youcef-Toumi, and Alberto Rodriguez 2016-11-29 Note 1. Website
Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016 Peter Yu, Fangzhou Xia, Ryan Fish, Kamal Youcef-Toumi, and Alberto Rodriguez 2016-11-29 Note 1. Website
Pedestrian Protection System for ADAS using ARM 9
 Pedestrian Protection System for ADAS using ARM 9 Rajashri Sanatkumar Dixit S.T. Gandhe Pravin Dhulekar ABSTRACT We developed pedestrian protection system by using haar cascade algorithm with Friendly
Pedestrian Protection System for ADAS using ARM 9 Rajashri Sanatkumar Dixit S.T. Gandhe Pravin Dhulekar ABSTRACT We developed pedestrian protection system by using haar cascade algorithm with Friendly
Uncovering Anomalous Usage of Medical Records via Social Network Analysis
 TRUST Autumn 2011 Conference Uncovering of Medical Records via Social Network Analysis You Chen, Ph.D. Biomedical Informatics Dept., School of Medicine EECS Dept., School of Engineering November 2, 2011
TRUST Autumn 2011 Conference Uncovering of Medical Records via Social Network Analysis You Chen, Ph.D. Biomedical Informatics Dept., School of Medicine EECS Dept., School of Engineering November 2, 2011
The Cooperative Cleaners Case Study: Modelling and Analysis in Real-Time ABS
 : Modelling and Analysis in Real-Time ABS Silvia Lizeth Tapia Tarifa Precise Modelling and Analysis University of Oslo sltarifa@ifi.uio.no 29.11.2013 S. Lizeth Tapia Tarifa Outline Motivation 1 Motivation
: Modelling and Analysis in Real-Time ABS Silvia Lizeth Tapia Tarifa Precise Modelling and Analysis University of Oslo sltarifa@ifi.uio.no 29.11.2013 S. Lizeth Tapia Tarifa Outline Motivation 1 Motivation
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Line Following with RobotC Page 1
 Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
PRESSURE MONITORING ND SAFETY SYSTEMS. Davor ZVIZDIC, Lovorka GRGEC BERMANEC FSB-LPM, Zagreb, Croatia.
 RESSURE MONITORING ND SAFETY SYSTEMS Davor ZVIZDIC, Lovorka GRGEC BERMANEC FSB-LM, Zagreb, Croatia. 1. Introduction The paper presents the experimental setup in Laboratory for rocess Measurement comprising
RESSURE MONITORING ND SAFETY SYSTEMS Davor ZVIZDIC, Lovorka GRGEC BERMANEC FSB-LM, Zagreb, Croatia. 1. Introduction The paper presents the experimental setup in Laboratory for rocess Measurement comprising
Smart-Walk: An Intelligent Physiological Monitoring System for Smart Families
 Smart-Walk: An Intelligent Physiological Monitoring System for Smart Families P. Sundaravadivel 1, S. P. Mohanty 2, E. Kougianos 3, V. P. Yanambaka 4, and M. K. Ganapathiraju 5 University of North Texas,
Smart-Walk: An Intelligent Physiological Monitoring System for Smart Families P. Sundaravadivel 1, S. P. Mohanty 2, E. Kougianos 3, V. P. Yanambaka 4, and M. K. Ganapathiraju 5 University of North Texas,
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
The Incremental Evolution of Gaits for Hexapod Robots
 The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
Introduction to topological data analysis
 Introduction to topological data analysis Ippei Obayashi Adavnced Institute for Materials Research, Tohoku University Jan. 12, 2018 I. Obayashi (AIMR (Tohoku U.)) Introduction to TDA Jan. 12, 2018 1 /
Introduction to topological data analysis Ippei Obayashi Adavnced Institute for Materials Research, Tohoku University Jan. 12, 2018 I. Obayashi (AIMR (Tohoku U.)) Introduction to TDA Jan. 12, 2018 1 /
Design of a double quadruped for the Tech United soccer robot
 Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Lecture 10. Support Vector Machines (cont.)
") Lecture 10. Support Vector Machines (cont.) COMP90051 Statistical Machine Learning Semester 2, 2017 Lecturer: Andrey Kan Copyright: University of Melbourne This lecture Soft margin SVM Intuition and problem
Lecture 10. Support Vector Machines (cont.) COMP90051 Statistical Machine Learning Semester 2, 2017 Lecturer: Andrey Kan Copyright: University of Melbourne This lecture Soft margin SVM Intuition and problem
Thursday, Nov 20, pm 2pm EB 3546 DIET MONITORING THROUGH BREATHING SIGNAL ANALYSIS USING WEARABLE SENSORS. Bo Dong. Advisor: Dr.
 Thursday, Nov 20, 2014 12 pm 2pm EB 3546 DIET MONITORING THROUGH BREATHING SIGNAL ANALYSIS USING WEARABLE SENSORS Bo Dong Advisor: Dr. Subir Biswas ABSTRACT This dissertation presents a framework of wearable
Thursday, Nov 20, 2014 12 pm 2pm EB 3546 DIET MONITORING THROUGH BREATHING SIGNAL ANALYSIS USING WEARABLE SENSORS Bo Dong Advisor: Dr. Subir Biswas ABSTRACT This dissertation presents a framework of wearable
Simulation Model Portability 2 standard support in EuroSim Mk4
 Simulation Portability 2 standard support in EuroSim Mk4 Jeroen Moelands EuroSim Design Leader (moelands@nlr.nl) Collaborative Engineering Systems department National Aerospace Laboratory NLR EuroSim Workshop
Simulation Portability 2 standard support in EuroSim Mk4 Jeroen Moelands EuroSim Design Leader (moelands@nlr.nl) Collaborative Engineering Systems department National Aerospace Laboratory NLR EuroSim Workshop
RoboCup Standard Platform League (NAO) Technical Challenges
 Technical Challenges") RoboCup Standard Platform League (NAO) Technical Challenges RoboCup Technical Committee (2014 rules, as of June 19, 2014) At RoboCup 2014, the Standard Platform League will hold three different technical
RoboCup Standard Platform League (NAO) Technical Challenges RoboCup Technical Committee (2014 rules, as of June 19, 2014) At RoboCup 2014, the Standard Platform League will hold three different technical
Lecture 1 Temporal constraints: source and characterization
 Real-Time Systems Lecture 1 Temporal constraints: source and characterization Basic concepts about real-time Requirements of Real-Time Systems Adapted from the slides developed by Prof. Luís Almeida for
Real-Time Systems Lecture 1 Temporal constraints: source and characterization Basic concepts about real-time Requirements of Real-Time Systems Adapted from the slides developed by Prof. Luís Almeida for
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Generation of Robot Motion Based on Measurement of Human Movement. Susumu Sakano 1, Satoru Shoji 1
 Generation of Robot Motion Based on Measurement of Human Movement Susumu Sakano 1, Satoru Shoji 1 1College of Engineering, Nihon University 1 Nakagawara Tokusada Tamura-machi Koriyama 963-8642 Japan Tel;
Generation of Robot Motion Based on Measurement of Human Movement Susumu Sakano 1, Satoru Shoji 1 1College of Engineering, Nihon University 1 Nakagawara Tokusada Tamura-machi Koriyama 963-8642 Japan Tel;
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Partially Observable MDP Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
CS 4649/7649 Robot Intelligence: Planning Partially Observable MDP Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
Gripping modules Pneumatic 2-finger parallel gripper Long-stroke gripper for small components Gripping force 120 N..
 GM Sizes 85.. 205 Mass 0.48 kg.. 2.7 kg 120 N.. 595 N Stroke per finger 16 mm.. 30 mm Workpiece weight, force-fit gripping Up to 2.3 kg Application example 3 5 3 4 2 5 2 1 1 Pneumatic double pick & place
GM Sizes 85.. 205 Mass 0.48 kg.. 2.7 kg 120 N.. 595 N Stroke per finger 16 mm.. 30 mm Workpiece weight, force-fit gripping Up to 2.3 kg Application example 3 5 3 4 2 5 2 1 1 Pneumatic double pick & place
RESPONSIVE ROUNDABOUTS MYTH OR REALITY
 RESPONSIVE ROUNDABOUTS MYTH OR REALITY Andy Poole WSP UK Three White Rose Office Park Millshaw Park Lane Leeds LS11 0DL andy.poole@wspgroup.com Keywords: Traffic signals, optimisation, micro-simulation,
RESPONSIVE ROUNDABOUTS MYTH OR REALITY Andy Poole WSP UK Three White Rose Office Park Millshaw Park Lane Leeds LS11 0DL andy.poole@wspgroup.com Keywords: Traffic signals, optimisation, micro-simulation,
Predicting Digging Success for Unmanned Aircraft System Sensor Emplacement
 Predicting Digging Success for Unmanned Aircraft System Sensor Emplacement Adam Plowcha 1, Yue Sun 2, Carrick Detweiler 1, and Justin Bradley 1 1 Computer Science and Engineering Department, University
Predicting Digging Success for Unmanned Aircraft System Sensor Emplacement Adam Plowcha 1, Yue Sun 2, Carrick Detweiler 1, and Justin Bradley 1 1 Computer Science and Engineering Department, University
Sharp Shooting: Improving Basketball Shooting Form
 Sharp Shooting: Improving Basketball Shooting Form Research on existing motion data collection software has been collected, and different software will be tested throughout this project. Materials, including
Sharp Shooting: Improving Basketball Shooting Form Research on existing motion data collection software has been collected, and different software will be tested throughout this project. Materials, including
Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings
 Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings Objectives The goal of this study is to advance the state of the art in understanding
Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings Objectives The goal of this study is to advance the state of the art in understanding
Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit
 TEKS/LINKS Student Objectives One Credit") Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit Suggested Time Ranges First Six Weeks History of Manufacturing PFD 1.1(A) The student will describe why and how manufacturing
Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit Suggested Time Ranges First Six Weeks History of Manufacturing PFD 1.1(A) The student will describe why and how manufacturing
Ride-through for Autonomous Vehicles
 Ride-through for Autonomous Vehicles Aaron Kane and Philip Koopman Carnegie Mellon University, Pittsburgh, PA akane@cmu.edu, koopman@cmu.edu Abstract. Safety critical systems often have shutdown mechanisms
Ride-through for Autonomous Vehicles Aaron Kane and Philip Koopman Carnegie Mellon University, Pittsburgh, PA akane@cmu.edu, koopman@cmu.edu Abstract. Safety critical systems often have shutdown mechanisms
Product Information. Gripper for small components MPG 20
 Product Information MPG 20 MPG Precise. Compact. Reliable. MPG gripper for small components 2-finger parallel gripper with smooth roller guides of the base jaws Field of application Gripping and moving
Product Information MPG 20 MPG Precise. Compact. Reliable. MPG gripper for small components 2-finger parallel gripper with smooth roller guides of the base jaws Field of application Gripping and moving
Using Spatio-Temporal Data To Create A Shot Probability Model
 Using Spatio-Temporal Data To Create A Shot Probability Model Eli Shayer, Ankit Goyal, Younes Bensouda Mourri June 2, 2016 1 Introduction Basketball is an invasion sport, which means that players move
Using Spatio-Temporal Data To Create A Shot Probability Model Eli Shayer, Ankit Goyal, Younes Bensouda Mourri June 2, 2016 1 Introduction Basketball is an invasion sport, which means that players move
Search and Rescue Mission George W. Woodruff School of Mechanical Engineering ME Creative Decisions and Design
 Search and Rescue Mission George W. Woodruff School of Mechanical Engineering ME 110 - Creative Decisions and Design Time: 5:00pm, Friday, April 3, 014 MaRC Building Atrium I. INTRODUCTION Despite great
Search and Rescue Mission George W. Woodruff School of Mechanical Engineering ME 110 - Creative Decisions and Design Time: 5:00pm, Friday, April 3, 014 MaRC Building Atrium I. INTRODUCTION Despite great
WHITE PAPER A Framework for Cyber Threat Hunting
 WHITE PAPER A Framework for Cyber Threat Hunting Sqrrl Data, Inc. 2016 All Rights Reserved TABLE OF CONTENTS I. INTRODUCTION - WHAT IS HUNTING? II. THE HUNTING MATURITY MODEL A. STEPS OF THE HMM B. AUTOMATION
WHITE PAPER A Framework for Cyber Threat Hunting Sqrrl Data, Inc. 2016 All Rights Reserved TABLE OF CONTENTS I. INTRODUCTION - WHAT IS HUNTING? II. THE HUNTING MATURITY MODEL A. STEPS OF THE HMM B. AUTOMATION
Data Sheet T 8389 EN. Series 3730 and 3731 Types , , , and. EXPERTplus Valve Diagnostic
 Data Sheet T 8389 EN Series 3730 and 3731 Types 3730-2, 3730-3, 3730-4, 3730-5 and Type 3731-3 Electropneumatic Positioners EXPERTplus Valve Diagnostic Application Positioner firmware to detect potential
Data Sheet T 8389 EN Series 3730 and 3731 Types 3730-2, 3730-3, 3730-4, 3730-5 and Type 3731-3 Electropneumatic Positioners EXPERTplus Valve Diagnostic Application Positioner firmware to detect potential
Safety Manual VEGAVIB series 60
 Safety Manual VEGAVIB series 60 NAMUR Document ID: 32005 Contents Contents 1 Functional safety... 3 1.1 General information... 3 1.2 Planning... 4 1.3 Adjustment instructions... 6 1.4 Setup... 6 1.5 Reaction
Safety Manual VEGAVIB series 60 NAMUR Document ID: 32005 Contents Contents 1 Functional safety... 3 1.1 General information... 3 1.2 Planning... 4 1.3 Adjustment instructions... 6 1.4 Setup... 6 1.5 Reaction
FIG: 27.1 Tool String
 Bring up Radioactive Tracer service. Click Acquisition Box - Edit - Tool String Edit the tool string as necessary to reflect the tool string being run. This is important to insure proper offsets, filters,
Bring up Radioactive Tracer service. Click Acquisition Box - Edit - Tool String Edit the tool string as necessary to reflect the tool string being run. This is important to insure proper offsets, filters,
Autonomy in the Open <Click Here to Download>
 Autonomy in the Open March 29th, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering Laboratory for Autonomous Marine Sensing Systems Computer Science and
Autonomy in the Open March 29th, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering Laboratory for Autonomous Marine Sensing Systems Computer Science and
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Environmental Science: An Indian Journal
 Environmental Science: An Indian Journal Research Vol 14 Iss 1 Flow Pattern and Liquid Holdup Prediction in Multiphase Flow by Machine Learning Approach Chandrasekaran S *, Kumar S Petroleum Engineering
Environmental Science: An Indian Journal Research Vol 14 Iss 1 Flow Pattern and Liquid Holdup Prediction in Multiphase Flow by Machine Learning Approach Chandrasekaran S *, Kumar S Petroleum Engineering
COMPRESSORS WITH SIDE STREAM
 NEW CONTROL PLACE METHOD FOR FOR TITLE FIXED SPEED AUTHORS COMPRESSORS WITH SIDE STREAM David Rossi, GE Oil & Gas Laurence Casali, GE Oil & Gas Marco Pelella, GE Oil & Gas Authors David is presently a
NEW CONTROL PLACE METHOD FOR FOR TITLE FIXED SPEED AUTHORS COMPRESSORS WITH SIDE STREAM David Rossi, GE Oil & Gas Laurence Casali, GE Oil & Gas Marco Pelella, GE Oil & Gas Authors David is presently a
Failure Detection in an Autonomous Underwater Vehicle
 Failure Detection in an Autonomous Underwater Vehicle Alec Orrick, Make McDermott, Department of Mechanical Engineering David M. Barnett, Eric L. Nelson, Glen N. Williams, Department of Computer Science
Failure Detection in an Autonomous Underwater Vehicle Alec Orrick, Make McDermott, Department of Mechanical Engineering David M. Barnett, Eric L. Nelson, Glen N. Williams, Department of Computer Science
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53. The design of exoskeleton lower limbs rehabilitation robot
 Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Learning EMG control of a robotic hand: Towards Active Prostheses
 Proceedings of the 006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 006 Learning EMG control of a robotic hand: Towards Active Prostheses Sebastian Bitzer Department
Proceedings of the 006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 006 Learning EMG control of a robotic hand: Towards Active Prostheses Sebastian Bitzer Department
JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts
 JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts Jan Kodovský, Jessica Fridrich May 16, 2012 / IH Conference 1 / 19 What is JPEG-compatibility steganalysis? Detects embedding
JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts Jan Kodovský, Jessica Fridrich May 16, 2012 / IH Conference 1 / 19 What is JPEG-compatibility steganalysis? Detects embedding
Advanced SOC. Key Technologies for Security Operations. RSA Security Summit 2014 Advanced SOC. RSA Security Summit, 24 april 2014 Marcel Knippen
 Advanced SOC Key Technologies for Security Operations RSA Security Summit, 24 april 2014 Marcel Knippen IT Security Experts Onsight External Use 2 Agenda Intro Onsight What s the need for an advanced SOC
Advanced SOC Key Technologies for Security Operations RSA Security Summit, 24 april 2014 Marcel Knippen IT Security Experts Onsight External Use 2 Agenda Intro Onsight What s the need for an advanced SOC
EX0-008 exin. Number: EX0-008 Passing Score: 800 Time Limit: 120 min.
 EX0-008 exin Number: EX0-008 Passing Score: 800 Time Limit: 120 min Exam A QUESTION 1 Which statement describes Release Planning? A. After looking at all the stories in the backlog, the team estimates
EX0-008 exin Number: EX0-008 Passing Score: 800 Time Limit: 120 min Exam A QUESTION 1 Which statement describes Release Planning? A. After looking at all the stories in the backlog, the team estimates
WOLFF luffing cranes - latticework frames by specialists. WOLFF luffing cranes An overview of the crane family
 WOLFF luffing cranes - latticework frames by specialists WOLFF luffing cranes An overview of the crane family Good visibility all around the new WOLFF driver s cab The new driver s cab offers lots of safety
WOLFF luffing cranes - latticework frames by specialists WOLFF luffing cranes An overview of the crane family Good visibility all around the new WOLFF driver s cab The new driver s cab offers lots of safety
COLLISION AVOIDANCE SYSTEM FOR BUSES, MANAGING PEDESTRIAN DETECTION AND ALERTS NEAR BUS STOPS
 COLLISION AVOIDANCE SYSTEM FOR BUSES, MANAGING PEDESTRIAN DETECTION AND ALERTS NEAR BUS STOPS Benjamin Englander Michael Cacic Cheikh Diop Rosco Collision Avoidance, Inc. United States of America Yaniv
COLLISION AVOIDANCE SYSTEM FOR BUSES, MANAGING PEDESTRIAN DETECTION AND ALERTS NEAR BUS STOPS Benjamin Englander Michael Cacic Cheikh Diop Rosco Collision Avoidance, Inc. United States of America Yaniv
How is SkyTrak different from other launch monitors?
 SkyTrak : The Drilldown If you re looking for a concise and brief overview of SkyTrak, what it is, how it works and what all the data elements indicate, then please watch our educational video series,
SkyTrak : The Drilldown If you re looking for a concise and brief overview of SkyTrak, what it is, how it works and what all the data elements indicate, then please watch our educational video series,
Predicting NBA Shots
 Predicting NBA Shots Brett Meehan Stanford University https://github.com/brettmeehan/cs229 Final Project bmeehan2@stanford.edu Abstract This paper examines the application of various machine learning algorithms
Predicting NBA Shots Brett Meehan Stanford University https://github.com/brettmeehan/cs229 Final Project bmeehan2@stanford.edu Abstract This paper examines the application of various machine learning algorithms
Sizes Weight Gripping force Stroke per finger Workpiece weight Pieces : kg N mm kg
 MPG-plus Sizes Weight Gripping force Stroke per finger Workpiece weight Pieces : 7 0.06.. 0.63 kg 25.. 350 N 1.5.. 10 mm 0.19.. 1.25 kg Application example Pneumatically driven, dual-axis pick-andplace
MPG-plus Sizes Weight Gripping force Stroke per finger Workpiece weight Pieces : 7 0.06.. 0.63 kg 25.. 350 N 1.5.. 10 mm 0.19.. 1.25 kg Application example Pneumatically driven, dual-axis pick-andplace
Online Companion to Using Simulation to Help Manage the Pace of Play in Golf
 Online Companion to Using Simulation to Help Manage the Pace of Play in Golf MoonSoo Choi Industrial Engineering and Operations Research, Columbia University, New York, NY, USA {moonsoo.choi@columbia.edu}
Online Companion to Using Simulation to Help Manage the Pace of Play in Golf MoonSoo Choi Industrial Engineering and Operations Research, Columbia University, New York, NY, USA {moonsoo.choi@columbia.edu}
This document contains recommendations that may help teams be more successful in preparing for and participating in the FTC World Championship Event.
 HOT SHOT! TIPS AND TRICKS SHEET This document contains recommendations that may help teams be more successful in preparing for and participating in the FTC World Championship Event. BEFORE YOU LEAVE FOR
HOT SHOT! TIPS AND TRICKS SHEET This document contains recommendations that may help teams be more successful in preparing for and participating in the FTC World Championship Event. BEFORE YOU LEAVE FOR
Cloud, Distributed, Embedded. Erlang in the Heterogeneous Computing World. Omer
 Cloud, Distributed, Embedded. Erlang in the Heterogeneous Computing World Omer Kilic @OmerK omer@erlang-solutions.com Outline Challenges in modern computing systems Heterogeneous computing Co-processors
Cloud, Distributed, Embedded. Erlang in the Heterogeneous Computing World Omer Kilic @OmerK omer@erlang-solutions.com Outline Challenges in modern computing systems Heterogeneous computing Co-processors
Autodesk Moldflow Communicator Process settings
 Autodesk Moldflow Communicator 212 Process settings Revision 1, 3 March 211. Contents Chapter 1 Process settings....................................... 1 Profiles.................................................
Autodesk Moldflow Communicator 212 Process settings Revision 1, 3 March 211. Contents Chapter 1 Process settings....................................... 1 Profiles.................................................
Navigating Blind People with Walking Impairments using a Smart Walker
 Autonomous Robots manuscript No. (will be inserted by the editor) Navigating Blind People with Walking Impairments using a Smart Walker Andreas Wachaja Pratik Agarwal Mathias Zink Miguel Reyes Adame Knut
Autonomous Robots manuscript No. (will be inserted by the editor) Navigating Blind People with Walking Impairments using a Smart Walker Andreas Wachaja Pratik Agarwal Mathias Zink Miguel Reyes Adame Knut
Task decomposition, dynamic role assignment, and low-bandwidth communication for real-time strategic teamwork
 Artificial Intelligence 110 (1999) 241 273 Task decomposition, dynamic role assignment, and low-bandwidth communication for real-time strategic teamwork Peter Stone, Manuela Veloso 1 Computer Science Department,
Artificial Intelligence 110 (1999) 241 273 Task decomposition, dynamic role assignment, and low-bandwidth communication for real-time strategic teamwork Peter Stone, Manuela Veloso 1 Computer Science Department,
SIMULATED PROOF TESTING OF MORTAR BASEPLATES
 SIMULATED PROOF TESTING OF MORTAR BASEPLATES Andrew G. Littlefield* and Joseph Sibilia US Army RDECOM-ARDEC Benét Laboratories Watervliet, NY 12180 USA Abstract In the current environment there is a need
SIMULATED PROOF TESTING OF MORTAR BASEPLATES Andrew G. Littlefield* and Joseph Sibilia US Army RDECOM-ARDEC Benét Laboratories Watervliet, NY 12180 USA Abstract In the current environment there is a need
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas
 Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
Transformer fault diagnosis using Dissolved Gas Analysis technology and Bayesian networks
 Proceedings of the 4th International Conference on Systems and Control, Sousse, Tunisia, April 28-30, 2015 TuCA.2 Transformer fault diagnosis using Dissolved Gas Analysis technology and Bayesian networks
Proceedings of the 4th International Conference on Systems and Control, Sousse, Tunisia, April 28-30, 2015 TuCA.2 Transformer fault diagnosis using Dissolved Gas Analysis technology and Bayesian networks
THE SCRUM GUIDE. illustrated
 THE SCRUM GUIDE illustrated Creative Commons License Attribution This is a derivative work by Kate Terlecka based on the Scrum Guide 2016 by Scrum.Org and ScrumInc, available at http://scrumguides.org.
THE SCRUM GUIDE illustrated Creative Commons License Attribution This is a derivative work by Kate Terlecka based on the Scrum Guide 2016 by Scrum.Org and ScrumInc, available at http://scrumguides.org.
Product Information. Gripper for small components MPG-plus 16
 Product Information MPG-plus 16 MPG-plus More powerful. Faster. Longer fingers. MPG-plus gripper for small components 2-finger parallel gripper with smooth roller guides of the base jaws Field of application
Product Information MPG-plus 16 MPG-plus More powerful. Faster. Longer fingers. MPG-plus gripper for small components 2-finger parallel gripper with smooth roller guides of the base jaws Field of application
The Intrinsic Value of a Batted Ball Technical Details
 The Intrinsic Value of a Batted Ball Technical Details Glenn Healey, EECS Department University of California, Irvine, CA 9617 Given a set of observed batted balls and their outcomes, we develop a method
The Intrinsic Value of a Batted Ball Technical Details Glenn Healey, EECS Department University of California, Irvine, CA 9617 Given a set of observed batted balls and their outcomes, we develop a method
Controlling the prefeeder
 Controlling the prefeeder A prefeeder is a modulating device of some kind, controlling the material flow into the belt feeder infeed. You need it for three reasons: 1. The material can not be sheared at
Controlling the prefeeder A prefeeder is a modulating device of some kind, controlling the material flow into the belt feeder infeed. You need it for three reasons: 1. The material can not be sheared at
A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL
 A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL L Boddy and T Clarke, Austal Ships, Australia SUMMARY CFD analysis has been conducted on a 100m catamaran hull
A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL L Boddy and T Clarke, Austal Ships, Australia SUMMARY CFD analysis has been conducted on a 100m catamaran hull
Tennis Simulators ABOUT HAWK-EYE
 Tennis Simulators 1 Tennis Simulators ABOUT HAWK-EYE Hawk-Eye is the most sophisticated officiating tool used in any sport. It is accurate, reliable and practical, with fans around the globe now expecting
Tennis Simulators 1 Tennis Simulators ABOUT HAWK-EYE Hawk-Eye is the most sophisticated officiating tool used in any sport. It is accurate, reliable and practical, with fans around the globe now expecting
Introduction to Machine Learning NPFL 054
 Introduction to Machine Learning NPFL 054 http://ufal.mff.cuni.cz/course/npfl054 Barbora Hladká hladka@ufal.mff.cuni.cz Martin Holub holub@ufal.mff.cuni.cz Charles University, Faculty of Mathematics and
Introduction to Machine Learning NPFL 054 http://ufal.mff.cuni.cz/course/npfl054 Barbora Hladká hladka@ufal.mff.cuni.cz Martin Holub holub@ufal.mff.cuni.cz Charles University, Faculty of Mathematics and
1.1 The size of the search space Modeling the problem Change over time Constraints... 21
 Introduction : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1 I What Are the Ages of My Three Sons? : : : : : : : : : : : : : : : : : 9 1 Why Are Some Problems Dicult to Solve? : : :
Introduction : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1 I What Are the Ages of My Three Sons? : : : : : : : : : : : : : : : : : 9 1 Why Are Some Problems Dicult to Solve? : : :
Ivan Suarez Robles, Joseph Wu 1
 Ivan Suarez Robles, Joseph Wu 1 Section 1: Introduction Mixed Martial Arts (MMA) is the fastest growing competitive sport in the world. Because the fighters engage in distinct martial art disciplines (boxing,
Ivan Suarez Robles, Joseph Wu 1 Section 1: Introduction Mixed Martial Arts (MMA) is the fastest growing competitive sport in the world. Because the fighters engage in distinct martial art disciplines (boxing,
A computer program that improves its performance at some task through experience.
 1 A computer program that improves its performance at some task through experience. 2 Example: Learn to Diagnose Patients T: Diagnose tumors from images P: Percent of patients correctly diagnosed E: Pre
1 A computer program that improves its performance at some task through experience. 2 Example: Learn to Diagnose Patients T: Diagnose tumors from images P: Percent of patients correctly diagnosed E: Pre
Product Information. Tolerance compensation unit TCU-Z
 Product Information TCU-Z TCU-Z Compact. Flexible. Productive. TCU-Z tolerance compensation unit The TCU is compensated on the basis of elastomers that compensate in all three directions, enabling them
Product Information TCU-Z TCU-Z Compact. Flexible. Productive. TCU-Z tolerance compensation unit The TCU is compensated on the basis of elastomers that compensate in all three directions, enabling them