Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
|
|
|
- Michael Hutchinson
- 5 years ago
- Views:
Transcription
1 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr
 complete coverage Up to date Cheap to obtain Subsurface maps: In situ")
 Expensive to obtain Why go under water?")
2 Land, atmosphere and sea surface maps: Many parameters obtainable through remote sensing High-resolution (Almost) complete coverage Up to date Cheap to obtain Subsurface maps: In situ measurements required! Low resolution Sparse Out-of-date (often by decades) Expensive to obtain Why go under water? N 6 34 E (60 m * 150 m) N W (700 km * 1500 km) Alexander Bahr
3 Seaglider (University of Washington, USA) Outline What is an AUV? Types of AUVs Payloads (sensing/scientific and navigation) Challenges in underwater robotics (Communication, Navigation) Cooperative Navigation Applications





4 Vehicle What is an AUV? and what not Mobile Resource-constrained Underwater Hostile environment Pressure Corrosion Fouling Potential loss of vehicle Autonomous Not remote controlled On board decision making Limited intervention capabilities Alexander Bahr

 Max depth 100 m 11 000m Endurance 2h 24h (72h) Pictures courtesy of")
5 Types of AUVs active propulsion Low end AUV Top end AUV Dimensions 0.7 m length * 0.1 m diameter 5 m length * 0.7 m diameter Price $ $ Top speed 1 m/s 3 m/s (15 m/s?) Max depth 100 m m Endurance 2h 24h (72h) Pictures courtesy of University of Hydroid, Ocean Server Alexander Bahr - Navigare 2011,

")
 Hovering")


")
 Nereus,")
")
6 Types of AUVs active propulsion Cetus (Lockheed Martin, USA) Flapping foil AUV (MIT) Hovering AUV (MIT/Bluefin) Gavia (Hafmynd, Iceland) SAPPHIRES (Saab, Sweden) Solar AUV (AUVSI, USA) SeaBed (WHOI, USA) Nereus, hybrid AUV/ROV (WHOI)
 Forward speed (0.")
 Limited navigation sensors Limited controllability Bio fouling becomes")
7 Types of AUVs buoyancy driven Vehicle changes buoyancy from positive to negative and back Attached wings cause forward motion Maximum depth (2000 m) Forward speed (0.3 m/s) Range: 5000 km (and more) Very long endurance vehicle (6 months many years) Very low power consumption Limited sensing capabilities Seaglider (University of Washington, USA) Limited navigation sensors Limited controllability Bio fouling becomes relevant Price: $ Pictures courtesy of University of Washington/APL, Webb Research

")

8 Types of AUVs buoyancy driven Seaglider (University of Washington, USA) XRAY glider (University of Washington, USA) Pictures courtesy of University of Washington/APL, Webb Research Alexander Bahr - Navigare 2011,
 Active acoustics (sub-bottom profiler)")
 Simple sonar")
 Passive acoustics Conductivity, Temperature,")
9 External sensing payloads Video Camera Sophisticated sonar (multi-beam, SAS) Active acoustics (sub-bottom profiler) Sampler Manipulator Large chemical sensors (CO 2 ) Computationally expensive sensors Camera (still) Simple sonar (side-scan, pencil beam) Magnetometer Small chemical sensors (O 2, chlorophyll) Passive acoustics Conductivity, Temperature, Depth Fluorescence Backscatter







10 Side-scan sonar External sensing payloads Imaging sonar Photos Multi-beam sonar: Pictures courtesy of Dana Yoerger, Hanu Singh, Hafmynd, Bluefin, IMOS Australia

 Simple")
 Long / Ultra-short Base")
 3")

11 Navigation payloads Fiber-optic north seeking gyro Sophisticated INS Doppler Velocity Logger (DVL) Simple Inertial Navigation System (INS) Long / Ultra-short Base Line GPS Depth Simple accelerometer (orientation) 3 axis magnetic compass Pictures courtesy of University of Hydroid, Ocean Server, Webb Research

 Extremly High Frequency")

 Green/blue LEDs")


12 What does not work Very High Frequency, Ultra High Frequency radio (MHz) (Wifi, Bluetooth, etc.) Extremly High Frequency radio (GHz) (GSM, Satellite) Infrared What sort-of works (short range) VeryLow Frequency radio (khz) Green/blue LEDs Directed laser Return current What works Extremly Low Frequency (Hz) Acoustic Challenges - communication Pictures courtesy of WHOI, MIT, Grumman, ANU, US Navy
 Strong acoustic signature Multipath Direct (1) Surface bounce (2) Thermocline Bounce (3) Bottom bounce (4) Acoustic")
13 Acoustic modem (WHOI, Benthos, MIT, ) Range: O(100 m) O(1-10 km) Data rate: O(bytes/s) O(kbytes/s) Energy expensive O(1 Joule/byte) Small channel capacity (one modem at a time) Strong temporal and local variations of channel Interference with navigation equipment (LBL, DVL) Strong acoustic signature Multipath Direct (1) Surface bounce (2) Thermocline Bounce (3) Bottom bounce (4) Acoustic communication 32 bytes every 10s! T 1 T
")



14 Absolute positioning Underwater navigation GPS (only when surfacing) LBL: 1. AUV send query ping to all beacons 2. Beacon 1 responds 3. Beacon 2 responds 4. Vehicle computes position Beacon field needs to be predeployed Operating area is limited by to a few km 2 Vision-aided navigation Picture courtesy of Ryan Eustice 1-5 km


 Provides 2D speed over ground Maximum distance")

15 Relative positioning: Underwater navigation Depth sensor underwater navigation is a 2D problem Magnetic compass ($1k; accuracy: 1-3 degrees) Fiber Optical Gyro (FOG) ($40k; accuracy: 0.1 degree) Inertial Navigation System Doppler Velocity Logger (DVL) Provides 2D speed over ground Maximum distance to seafloor: 30 m 200 m Best case AUV navigation accuracies Surface: GPS Near seafloor: 0.1% distance traveled Mid-water column: 1.5 km/h drift Pictures courtesy of RDI, IXSEA
![Navigation error [%/distance travelled]](/docs-images/90/102644896/images/16-1.jpg "Cooperative navigation Different vehicles")

 0.")
 Surface vehicle (GPS) Pictures")
16 Navigation error [%/distance travelled] Cooperative navigation Different vehicles have different navigation sensors with different accuracies 10% Glider (compass + speed estimate) 1% AUV (DVL/compass based navigation) 0.1% 0% AUV deluxe (INS with fiber- optic gyro) Surface vehicle (GPS) Pictures courtesy of University of Washington/APL, Hydroid, Kongsberg
 Certainty estimate P (additional information) Inter-vehicle measurement (range r is")
17 In heterogeneous teams: Cooperative navigation Use other vehicles position estimate to update my own x,p,r Each vehicle is outfitted with an acoustic modem Vehicle broadcast Position estimate x(x,y, depth, course, speed) Certainty estimate P (additional information) Inter-vehicle measurement (range r is available)

 slave Illustration courtesy of")
18 Ad-hoc: Cooperative navigation Heterogeneous group of vehicles Broadcast when position uncertainty low Hierarchical: Task specific AUVs Dedicated communication and navigation aids (CNA) (expensive navigation sensors, frequent surfacings, few vehicles) master Mission specific AUVs (cheap navigation sensors, no surfacing, many vehicles) slave Illustration courtesy of Bluefin Robotics

19 Cooperative Navigation experiment Panama City, FL, December 2006 Mine Counter Measure (MCM) 2 Autonomous Surface Crafts 1 AUV: Bluefin 12 Navigation: depth gauge, DVL, INS, compass Acoustic modem ASCs followed AUV ASCs broadcast GPS position, AUV got range to ASC
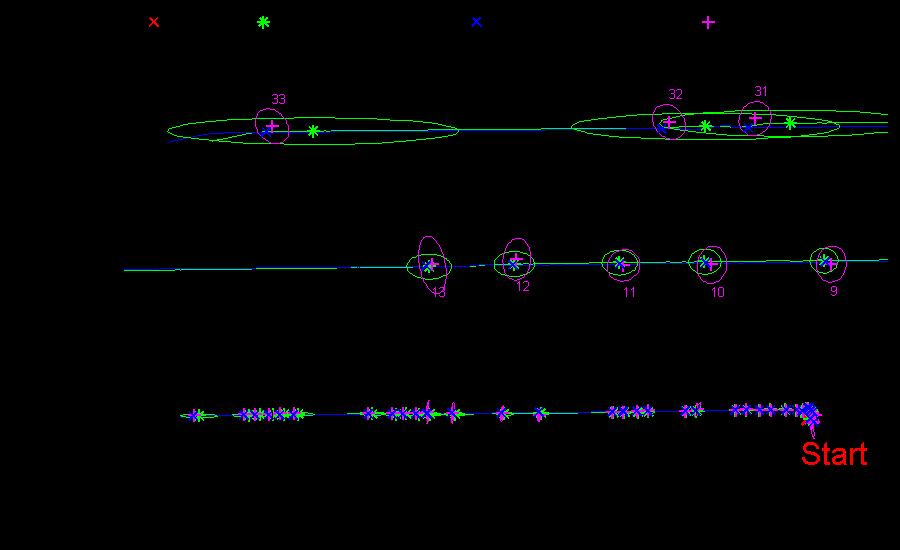
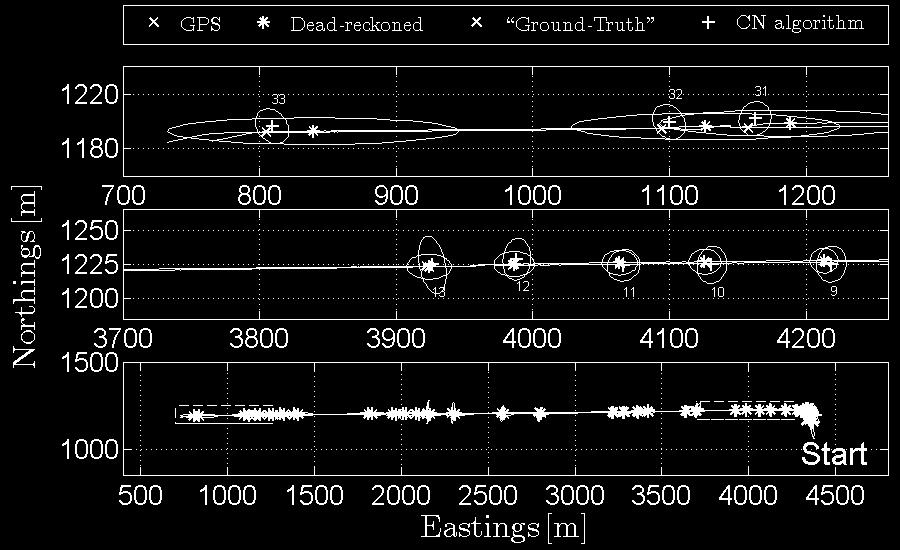
20 Cooperative Navigation experiment 30 m!


21 Applications Static missions Pre-programmed List of waypoints Non-adaptive Adaptive missions Partially pre-programmed List of behaviors Vehicle adapts depending on sensor reading Multi-vehicle missions Pre-programmed or adaptive warm cold Pictures courtesy of Ocean Server
22 Conclusions AUVs face difficulties not encountered in other environments Expensive hardware, but cheaper alternatives are underway Experiments require careful planning and execution Most difficult terrain to navigate in Drift will always get you Absolute position update requires extensive infrastructure OR Cooperative navigation
23 Thank you!
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology
 How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
Overview: Underwater sensing
 Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Sensors and Platforms for Autonomous Undersea Systems
 Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
MAPCO2 Buoy Metadata Report Project Title:
 MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader Community
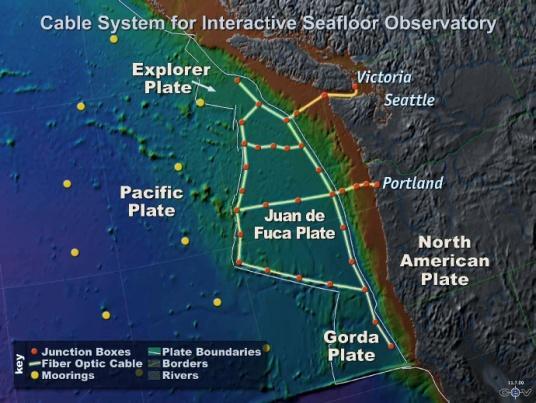
 Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
Testing and Evaluation of REMUS Vehicle Systems
 Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
August Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd.
 August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd. Gavia? Gavia immer (common loon; great northern diver) Autonomous
August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd. Gavia? Gavia immer (common loon; great northern diver) Autonomous
Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem.
 Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem. S. Afzulpurkar, P. Maurya, G. Navelkar, E. Desa, A. Mascarenhas, N. Dabholkar, R. Madhan 1, S.
Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem. S. Afzulpurkar, P. Maurya, G. Navelkar, E. Desa, A. Mascarenhas, N. Dabholkar, R. Madhan 1, S.
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Review and Classification of The Modern ROV
 Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
SEAHORSES and SUBMARINES Testing transformational capabilities with modern UUVs at NAVOCEANO by Craig A. Peterson and Martha E. M.
 SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
An accident at sea, such as an
 Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Oceanographic Research With The LiquID Station
 Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
KAIREI Cruise Report. KR17-11 Leg2
 KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
MOTUS Wave Buoys. Powered By the Aanderaa MOTUS Directional Wave Sensor
 MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
Autonomous Marine Robots Assisting Divers
 LUST Overview UNIVERSITY OF ZAGREB Faculty of Electrical Engineering and Computing Department of Control & Computer Engineering Laboratory for Underwater Systems and technologies Autonomous Marine Robots
LUST Overview UNIVERSITY OF ZAGREB Faculty of Electrical Engineering and Computing Department of Control & Computer Engineering Laboratory for Underwater Systems and technologies Autonomous Marine Robots
A Distributed Control System using CAN bus for an AUV
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
Autonomy in the Open <Click Here to Download>
 Autonomy in the Open March 29th, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering Laboratory for Autonomous Marine Sensing Systems Computer Science and
Autonomy in the Open March 29th, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering Laboratory for Autonomous Marine Sensing Systems Computer Science and
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
Near-bottom Multibeam Surveys for Deep Sea Scientific Applications
 Near-bottom Multibeam Surveys for Deep Sea Scientific Applications Scott J. McCue Dana R. Yoerger Dept of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543
Near-bottom Multibeam Surveys for Deep Sea Scientific Applications Scott J. McCue Dana R. Yoerger Dept of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle
 Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS)
") Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
MEMS Sensors for Smart Living: ITRI Solutions. Chris Chen, ITRI
 MEMS Sensors for Smart Living: ITRI Solutions Chris Chen, ITRI MEMS Sensors for Smart Living Outline Sensors are Everywhere What MEMS Sensors are Most Required Smart Living Megatrend Herald Next Wave of
MEMS Sensors for Smart Living: ITRI Solutions Chris Chen, ITRI MEMS Sensors for Smart Living Outline Sensors are Everywhere What MEMS Sensors are Most Required Smart Living Megatrend Herald Next Wave of
Ocean Deployment and Testing of a Semi-Autonomous Underwater Vehicle
 Ocean Deployment and Testing of a Semi-Autonomous Underwater Vehicle Nicholas R.J. Lawrance, Thane Somers, Dylan Jones, Seth McCammon and Geoffrey A. Hollinger Robotics Program, School of Mechanical, Industrial,
Ocean Deployment and Testing of a Semi-Autonomous Underwater Vehicle Nicholas R.J. Lawrance, Thane Somers, Dylan Jones, Seth McCammon and Geoffrey A. Hollinger Robotics Program, School of Mechanical, Industrial,
The SeaBED AUV A Platform for High Resolution Imaging
 The SeaBED AUV A Platform for High Resolution Imaging Hanumant Singh, Ryan Eustice, Chris Roman, Oscar Pizarro, Deep Submergence Laboratory, MS # 7, Woods Hole Oceanographic Institution, Woods Hole MA
The SeaBED AUV A Platform for High Resolution Imaging Hanumant Singh, Ryan Eustice, Chris Roman, Oscar Pizarro, Deep Submergence Laboratory, MS # 7, Woods Hole Oceanographic Institution, Woods Hole MA
A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV
 A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV Robert Damus, Samuel Desset, James Morash, Victor Polidoro Autonomous Underwater Vehicles Lab, Massachusetts Institute of Technology,
A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV Robert Damus, Samuel Desset, James Morash, Victor Polidoro Autonomous Underwater Vehicles Lab, Massachusetts Institute of Technology,
ADAPTIVE PATH PLANNING FOR AN AUTONOMOUS MARINE VEHICLE PERFORMING COOPERATIVE NAVIGATION FOR AUTONOMOUS UNDERWATER VEHICLES.
 ADAPTIVE PATH PLANNING FOR AN AUTONOMOUS MARINE VEHICLE PERFORMING COOPERATIVE NAVIGATION FOR AUTONOMOUS UNDERWATER VEHICLES by Jonathan Hudson Submitted in partial fulfilment of the requirements for the
ADAPTIVE PATH PLANNING FOR AN AUTONOMOUS MARINE VEHICLE PERFORMING COOPERATIVE NAVIGATION FOR AUTONOMOUS UNDERWATER VEHICLES by Jonathan Hudson Submitted in partial fulfilment of the requirements for the
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys
 MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
Axial Base (PN3A) Medium-Power (MP) J-box
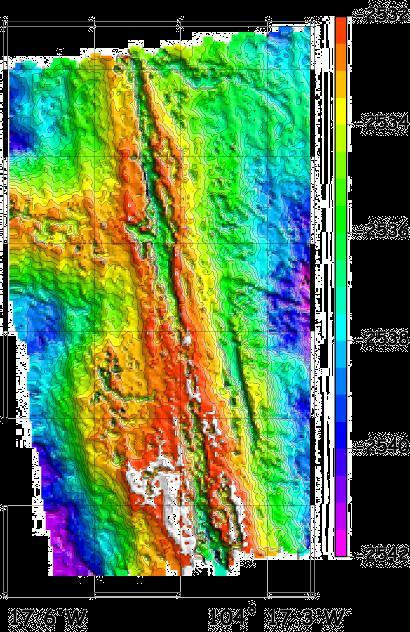
 Medium-Power (MP) J-box") Axial Base (PN3A) Medium-Power (MP) J-box Location: 46.1 N, 129.6 W Depth of Water Column: 2654 m This node supports geophysical instruments at the base of Axial Seamount. Instrument Name/Description Data
Axial Base (PN3A) Medium-Power (MP) J-box Location: 46.1 N, 129.6 W Depth of Water Column: 2654 m This node supports geophysical instruments at the base of Axial Seamount. Instrument Name/Description Data
SEA SURFACE TEMPERATURE RETRIEVAL USING TRMM MICROWAVE IMAGER SATELLITE DATA IN THE SOUTH CHINA SEA
 SEA SURFACE TEMPERATURE RETRIEVAL USING TRMM MICROWAVE IMAGER SATELLITE DATA IN THE SOUTH CHINA SEA Mohd Ibrahim Seeni Mohd and Mohd Nadzri Md. Reba Faculty of Geoinformation Science and Engineering Universiti
SEA SURFACE TEMPERATURE RETRIEVAL USING TRMM MICROWAVE IMAGER SATELLITE DATA IN THE SOUTH CHINA SEA Mohd Ibrahim Seeni Mohd and Mohd Nadzri Md. Reba Faculty of Geoinformation Science and Engineering Universiti
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks
 In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
AFFORDABLE DEEP OCEAN EXPLORATION WITH A HOVERING AUTONOMOUS UNDERWATER VEHICLE Odyssey IV: a 6000 meter rated, cruising and hovering AUV
 AFFORDABLE DEEP OCEAN EXPLORATION WITH A HOVERING AUTONOMOUS UNDERWATER VEHICLE Odyssey IV: a 6000 meter rated, cruising and hovering AUV V. Polidoro, S. Desset, C. Chryssostomidis, F. Hover, J. Morash,
AFFORDABLE DEEP OCEAN EXPLORATION WITH A HOVERING AUTONOMOUS UNDERWATER VEHICLE Odyssey IV: a 6000 meter rated, cruising and hovering AUV V. Polidoro, S. Desset, C. Chryssostomidis, F. Hover, J. Morash,
Cooperative Autonomous Robotics at Sea
 Cooperative Robotics at Sea Andreas J. Häusler Laboratory of Robotics and Systems in Science and Engineering Instituto Superior Técnico Lisbon, Portugal MARUM, September 9, 2014 Introduction Cheira bem,
Cooperative Robotics at Sea Andreas J. Häusler Laboratory of Robotics and Systems in Science and Engineering Instituto Superior Técnico Lisbon, Portugal MARUM, September 9, 2014 Introduction Cheira bem,
 1 CHAPTER 1 INTRODUCTION 1.1 Simulation of Motion of an Underwater Vehicle One of the safest ways to explore the underwater is using small unmanned vehicles to carry out various missions and measurements,
1 CHAPTER 1 INTRODUCTION 1.1 Simulation of Motion of an Underwater Vehicle One of the safest ways to explore the underwater is using small unmanned vehicles to carry out various missions and measurements,
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
ATON System Workshop
 ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
Autonomous Underwater Vehicles - achievements and current trends
 Volume XXI 2018 ISSUE no.1 MBNA Publishing House Constanta 2018 SBNA PAPER OPEN ACCESS Autonomous Underwater Vehicles - achievements and current trends To cite this article: R G Damian, N Jula and S V
Volume XXI 2018 ISSUE no.1 MBNA Publishing House Constanta 2018 SBNA PAPER OPEN ACCESS Autonomous Underwater Vehicles - achievements and current trends To cite this article: R G Damian, N Jula and S V
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads
 Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads Carrick Detweiler, Stefan Sosnowski, Iuliu Vasilescu, and Daniela Rus Computer Science and Artificial Intelligence
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads Carrick Detweiler, Stefan Sosnowski, Iuliu Vasilescu, and Daniela Rus Computer Science and Artificial Intelligence
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
Simulation and In-water Testing of the Mid-Sized Autonomous Research Vehicle (MARV) Thomas Fulton NUWC Newport
 Thomas Fulton NUWC Newport") Simulation and In-water Testing of the Mid-Sized Autonomous Research Vehicle (MARV) Thomas Fulton NUWC Newport Unmanned Maritime Vehicle T&E Conference June 14-16, 2005 Agenda MARV overview MARV as a T&E
Simulation and In-water Testing of the Mid-Sized Autonomous Research Vehicle (MARV) Thomas Fulton NUWC Newport Unmanned Maritime Vehicle T&E Conference June 14-16, 2005 Agenda MARV overview MARV as a T&E
ENVIRONMENTALLY ADAPTIVE SONAR
 ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
CENTER FOR SUBSURFACE SENSING AND IMAGING SYSTEMS
 CENTER FOR SUBSURFACE SENSING AND IMAGING SYSTEMS S4: Coral Reef Monitoring Why Coral Reefs? Roy A. Armstrong UPRM CenSSIS Site Visit April 5, 2006 The Importance of Coral Reefs Coral reefs are highly
CENTER FOR SUBSURFACE SENSING AND IMAGING SYSTEMS S4: Coral Reef Monitoring Why Coral Reefs? Roy A. Armstrong UPRM CenSSIS Site Visit April 5, 2006 The Importance of Coral Reefs Coral reefs are highly
"Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider"
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
Amour V: A Hovering Energy Efficient Underwater Robot Capable of Dynamic Payloads
 Amour V: A Hovering Energy Efficient Underwater Robot Capable of Dynamic Payloads Iuliu Vasilescu, Carrick Detweiler, Marek Doniec, Daniel Gurdan, Stefan Sosnowski, Jan Stumpf and Daniela Rus Computer
Amour V: A Hovering Energy Efficient Underwater Robot Capable of Dynamic Payloads Iuliu Vasilescu, Carrick Detweiler, Marek Doniec, Daniel Gurdan, Stefan Sosnowski, Jan Stumpf and Daniela Rus Computer
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
Survey solutions. catalogue DEEP INSIGHT. SHARPER SENSES.
 Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
The development of the modular Hard- and Software Architecture of the Autonomous Underwater Vehicle MONSUN
 The development of the modular Hard- and Software Architecture of the Autonomous Underwater Vehicle MONSUN Benjamin Meyer, Kristian Ehlers, Cedric Isokeit and Erik Maehle University of Lübeck, Institute
The development of the modular Hard- and Software Architecture of the Autonomous Underwater Vehicle MONSUN Benjamin Meyer, Kristian Ehlers, Cedric Isokeit and Erik Maehle University of Lübeck, Institute
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
ALFA Task 2 Deliverable M2.2.1: Underwater Vehicle Station Keeping Results
 ALFA Task Deliverable M..: Underwater Vehicle Station Keeping Results Geoffrey Hollinger Oregon State University Phone: 5-737-59 geoff.hollinger@oregonstate.edu September, Introduction This document presents
ALFA Task Deliverable M..: Underwater Vehicle Station Keeping Results Geoffrey Hollinger Oregon State University Phone: 5-737-59 geoff.hollinger@oregonstate.edu September, Introduction This document presents
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
Sparse LBL aided INS for Subsea Positioning
 Sparse LBL aided INS for Subsea Positioning Edward Moller Global Business Manager Construction Survey What is LBL? GPS Network What is LBL? We turn GPS upside down LBL installed in a subsea field development
Sparse LBL aided INS for Subsea Positioning Edward Moller Global Business Manager Construction Survey What is LBL? GPS Network What is LBL? We turn GPS upside down LBL installed in a subsea field development
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa
 Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
Field testing of the Nereus network
 Field testing of the Nereus network Harry Hemond Department of Civil and Environmental Engineering Massachusetts Institute of Technology Cambridge, MA Prior Work: Portable Mass Spectrometer for Metabolic
Field testing of the Nereus network Harry Hemond Department of Civil and Environmental Engineering Massachusetts Institute of Technology Cambridge, MA Prior Work: Portable Mass Spectrometer for Metabolic
Alvin. The Deep Submergence Vehicle. An Advanced Platform for Direct Deep Sea Observation and Research. by W. Bruce Strickrott
 The Deep Submergence Vehicle Alvin An Advanced Platform for Direct Deep Sea Observation and Research by W. Bruce Strickrott WHOI 34 The Journal of Ocean Technology, Vol. 12, No. 1, 2017 The Journal of
The Deep Submergence Vehicle Alvin An Advanced Platform for Direct Deep Sea Observation and Research by W. Bruce Strickrott WHOI 34 The Journal of Ocean Technology, Vol. 12, No. 1, 2017 The Journal of
REMOTE SENSING APPLICATION in WIND ENERGY
 REMOTE SENSING APPLICATION in WIND ENERGY Siraj Ahmed Professor & Head Department of Mechanical Engineering Maulana Azad National Iinstitute of Technology Bhopal, India sirajahmed@manit.ac.in Contents
REMOTE SENSING APPLICATION in WIND ENERGY Siraj Ahmed Professor & Head Department of Mechanical Engineering Maulana Azad National Iinstitute of Technology Bhopal, India sirajahmed@manit.ac.in Contents
Fault Diagnosis based on Particle Filter - with applications to marine crafts
 1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV SYSTEM
 TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution Joseph D. Warren School of Marine and Atmospheric
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution Joseph D. Warren School of Marine and Atmospheric
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles
 Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Search Methodology. massive parts of the aircraft traveled down the reef. yet, unexplored depths. The Niku VII expedition. will have the capability to
 CONTENTS Expedition Purpose & Objective... 2 Search Area... 2 Search Methodology... 3 Search Technology... 4 Documentation... 5 Expedition Itinerary... 5 Expedition Team... 5 Ship Description & Photo Gallery...
CONTENTS Expedition Purpose & Objective... 2 Search Area... 2 Search Methodology... 3 Search Technology... 4 Documentation... 5 Expedition Itinerary... 5 Expedition Team... 5 Ship Description & Photo Gallery...
WindProspector TM Lockheed Martin Corporation
 WindProspector TM www.lockheedmartin.com/windprospector 2013 Lockheed Martin Corporation WindProspector Unparalleled Wind Resource Assessment Industry Challenge Wind resource assessment meteorologists
WindProspector TM www.lockheedmartin.com/windprospector 2013 Lockheed Martin Corporation WindProspector Unparalleled Wind Resource Assessment Industry Challenge Wind resource assessment meteorologists
Autosub6000: A Deep Diving Long Range AUV
 Autosub6000: A Deep Diving Long Range AUV Stephen McPhail Underwater Systems Laboratory, National Marine Facilities Division National Oceanography Centre, Southampton European Way, Southampton, SO14 3ZH,
Autosub6000: A Deep Diving Long Range AUV Stephen McPhail Underwater Systems Laboratory, National Marine Facilities Division National Oceanography Centre, Southampton European Way, Southampton, SO14 3ZH,
Marine Opera*ons Group Marine Technology Program SRI Interna*onal SRI International
 Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft.
Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft.
HUGIN USE OF UUV TECHNOLOGY IN MARINE APPLICATIONS
 HUGIN USE OF UUV TECHNOLOGY IN MARINE APPLICATIONS Per Espen Hagen, Nils J Størkersen Norwegian Defence Research Establishment (FFI) P O Box 25, NO-2027 Kjeller, Norway per-espen.hagen@ffi.no, nils-j.storkersen@ffi.no
HUGIN USE OF UUV TECHNOLOGY IN MARINE APPLICATIONS Per Espen Hagen, Nils J Størkersen Norwegian Defence Research Establishment (FFI) P O Box 25, NO-2027 Kjeller, Norway per-espen.hagen@ffi.no, nils-j.storkersen@ffi.no
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane
 Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001
 Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001 Anthony J. Healey David B. Marco Center for Autonomous Underwater Vehicle Research Naval Postgraduate School Monterey, CA phone: (831)-656-3462
Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001 Anthony J. Healey David B. Marco Center for Autonomous Underwater Vehicle Research Naval Postgraduate School Monterey, CA phone: (831)-656-3462
The I-UTECH Consortium
 The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System
 Light Fiber Tether System") Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Producing Chart Data from Interferometric Sonars on Small AUVs
 Producing Chart Data from Interferometric Sonars on Small AUVs Tom Hiller 1, Thomas B. Reed IV 2, Arnar Steingrimsson 3 1: Thurne Hydrographic Ltd., Norwich, UK. 2: OIC Inc., Honolulu, Hawaii, USA. 3:
Producing Chart Data from Interferometric Sonars on Small AUVs Tom Hiller 1, Thomas B. Reed IV 2, Arnar Steingrimsson 3 1: Thurne Hydrographic Ltd., Norwich, UK. 2: OIC Inc., Honolulu, Hawaii, USA. 3:
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
ANNEX. to the. Commission Delegated Regulation
 EUROPEAN COMMISSION Brussels, 26.9.2017 C(2017) 6321 final ANNEX 1 PART 10/11 ANNEX to the Commission Delegated Regulation amending Council Regulation (EC) No 428/2009 setting up a Community regime for
EUROPEAN COMMISSION Brussels, 26.9.2017 C(2017) 6321 final ANNEX 1 PART 10/11 ANNEX to the Commission Delegated Regulation amending Council Regulation (EC) No 428/2009 setting up a Community regime for
AN UNDERWATER AUGMENTED REALITY SYSTEM FOR COMMERCIAL DIVING OPERATIONS
 SYSTEM FOR COMMERCIAL DIVING OPERATIONS ROGELIO!MORALES-GARCÍA, PETER!KEITLER,!PATRICK!MAIER, GUDRUN!KLINKER! FACHGEBIET AUGMENTED (FAR) OCEANS '09 MTS/IEEE BILOXI "MARINE TECHNOLOGY FOR OUR FUTURE: GLOBAL
SYSTEM FOR COMMERCIAL DIVING OPERATIONS ROGELIO!MORALES-GARCÍA, PETER!KEITLER,!PATRICK!MAIER, GUDRUN!KLINKER! FACHGEBIET AUGMENTED (FAR) OCEANS '09 MTS/IEEE BILOXI "MARINE TECHNOLOGY FOR OUR FUTURE: GLOBAL
Exploration of Underwater Volcano by Autonomous Underwater Vehicle
 Exploration of Underwater Volcano by Autonomous Underwater Vehicle Tamaki Ura Institute of Industrial Science, the University of Tokyo ura@iis.u-tokyo.ac.jp, 4-6-1, Komaba, Meguro, Tokyo 153-8505 Japan
Exploration of Underwater Volcano by Autonomous Underwater Vehicle Tamaki Ura Institute of Industrial Science, the University of Tokyo ura@iis.u-tokyo.ac.jp, 4-6-1, Komaba, Meguro, Tokyo 153-8505 Japan
The Wave Glider: A Persistent Platform for Ocean Science
 The Wave Glider: A Persistent Platform for Ocean Science Justin Manley and Scott Willcox Liquid Robotics - Sunnyvale, CA justin.manley@liquidr.com, http://www.liquidr.com Abstract The Wave Glider is an
The Wave Glider: A Persistent Platform for Ocean Science Justin Manley and Scott Willcox Liquid Robotics - Sunnyvale, CA justin.manley@liquidr.com, http://www.liquidr.com Abstract The Wave Glider is an
Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways.
 Accura Hydrographic RC Survey Boat Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways. Utilises Sounder & Transducer from CEE
Accura Hydrographic RC Survey Boat Compact Light Weight RC Boat for Hydrographic Surveys on Dams, Creeks, Rivers, storm water retention pits and other waterways. Utilises Sounder & Transducer from CEE
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements
 Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract