NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
|
|
|
- Arron Horn
- 5 years ago
- Views:
Transcription
1 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution
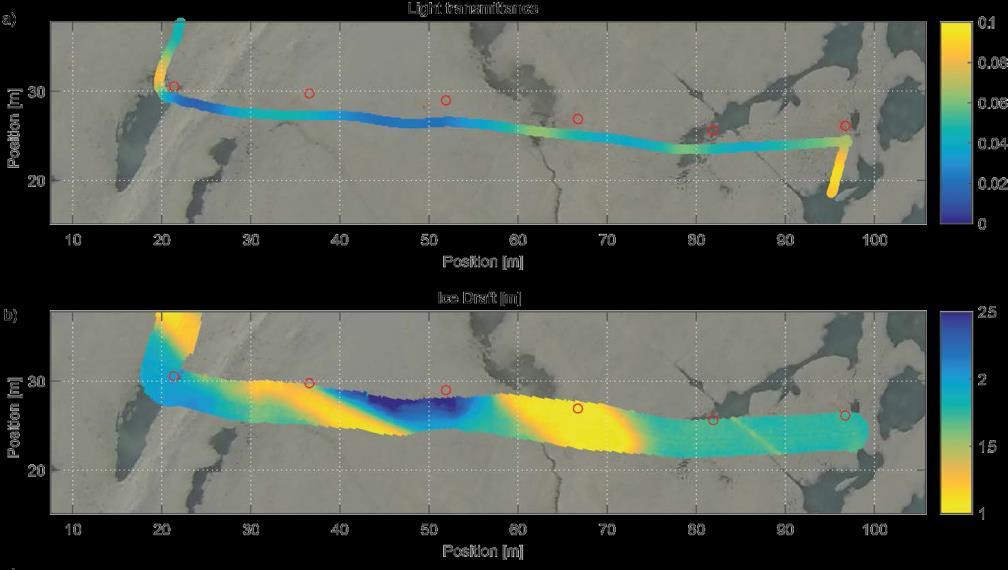
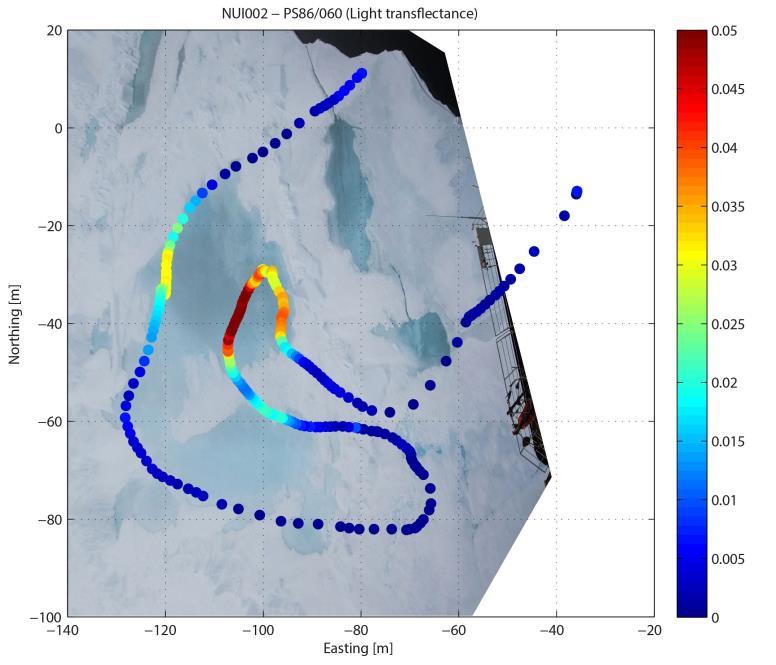



2 Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m


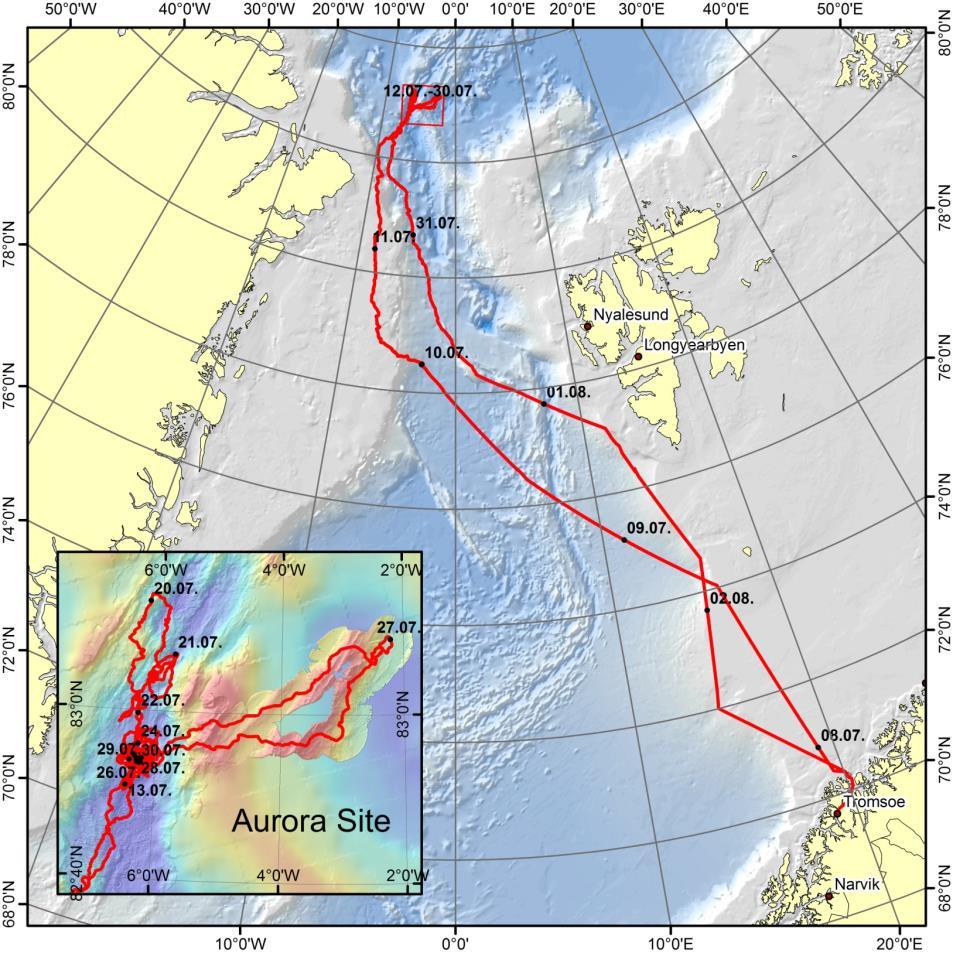

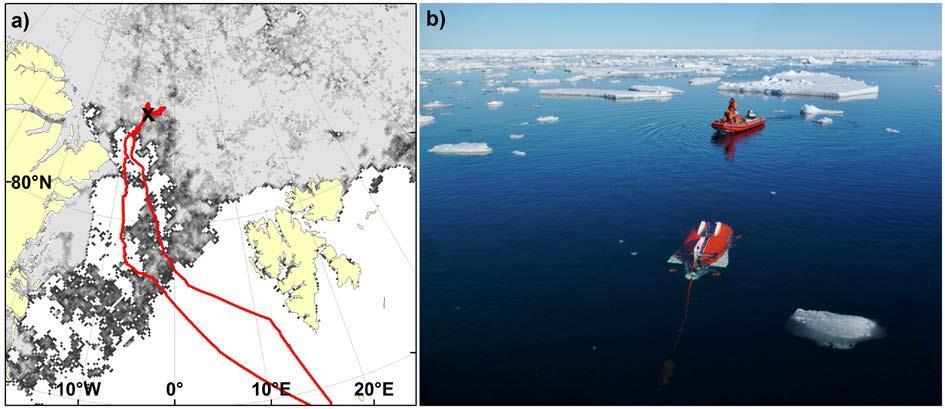
3 NUI Summer 2014 Deployments at 83 N 6 W F/V Polarstern PS86-3 3


4 Cape Cod Bay, September R/V Tioga Built: 2004 Length: 60 feet Beam: 17 feet Draft: 5 feet Gross Tons: 53 T Range: 300 NM A-Frame: SWL 4600 lbf
 Photo Credit: C.")
5 Vehicle Overview Sentry Commonalities Highlighed Emergency Beacons Launch and Recovery Modeled on Sentry Short Range Acoustic Comms (10 khz) Redundant Propulsion Situational Awareness Cameras High End Navigation Suite NDSF Control and Navigation software 2000 m Depth Rating Contingency Recovery Aids Long Range Acoustic Comms (3.5 khz) Photo Credit: C. Katlein, AWI Redundant Batteries Dual Up/Dn ADCP/DVLs
 6 Air Weight Depth Rating Battery Time 1800-2000 kg depending on")
6 Specifications: Physical Range 40 1 m/sec plus 20 km reserve (preliminary). Maximum speed in excess of 1.3 m/s. Closed-loop control of heading, depth, ice-relative and geo-referenced position (within 150 m of ice and seafloor, respectively) 6 Air Weight Depth Rating Battery Time kg depending on configuration m 18 kwhr pressure-tolerant lithium-ion On board precision atomic clock synchronized to GPS, 1 ppb drift rate/year. Navigation Inertial IXSea Phins INS/north-seeking gyro-compass; back-up magnetic compasses (3) Intervention Depth Paroscientific Nano-Resolution pressure sensor; SBE 49 FastCAT back-up Acoustic up/down 300 khz DVLs; 200 khz Imagenex DeltaT multibeam (July 2016); Blueview P900 imaging sonar for obstacle avoidance, One-way travel-time acoustic navigational aiding at 10 Hz, 3.5 khz. Electro-Hydraulic Manipulator Kraft Telerobotics 7-function manipulator arm and custom high-efficiency HPU (March 2016): push coring, ice sampling, instrument emplacement, etc. Native Sensing Optical Real-time color HD-SDI video on internal pan/tilt/zoom (Kongsberg OE12-522); LED lighting (8 DSPL Sphere, dimmable), 5 channels SD, encoded on board. 1 MP up-looking still camera (summer 2016) Acoustic up/down 300 khz ADCPs; 200 khz Imagenex DeltaT multibeam (summer 2016); Chemical Seabird FastCAT-49 pumped CTD; WetLabs FLNTURTD Chl/backscatter fluorometer (0-30 ug/l, 0-10 NTU) Auxiliary payload Native support for 10 auxiliary sensors. ~100 kg wet weight, 500 Whr Energy, allowance (all 1000 W total (6 high-power channels with Gb Ethernet and/or RS-232, 100 W bays): per channel, 6 low-power channels 3-15 W per channel, RS-232). 4 hardware trigger lines. All channels logged on board and delivered in real-time topside. Other communications protocols on request.
7 7 SVC4 Objectives AUV Ops Capability Demonstrator Launch and recovery (Sentry-analogous) Coordination with bridge and appropriate ship motion Deck ops Navigation and possibly SMS comms using Armstrong's Sonardyne USBL - again Sentry-analogous. Includes map generation to validate navigation. Requires rental of a Sonardyne beacon or use of Armstrong s if available. Appropriate ship motion during dives for maintaining USBL including making navg available on bridge - again Sentry-analogous Coordination with bridge, pre and during mission Demonstration of micromodem acomms using ship's 10 and 3.5 khz transducers Fallback will use NUI s self-contained system Deck and topside installation Ship s power for charging deck cabling for charge power and comms connections ship s data feeds
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
!"#$%&'()*$+,,($-!.#$/*)0*122$!13)*4$
*$+,,($-!.#$/*)0*122$!13)*4$") In collaboration with WHOI NDSF and DeepSea Challenger, develop a technologically advanced 11k HROV (ROV or AUV) for R/V Falkor, supporting: Robust access to abyssal and hadal zones for scientific research
In collaboration with WHOI NDSF and DeepSea Challenger, develop a technologically advanced 11k HROV (ROV or AUV) for R/V Falkor, supporting: Robust access to abyssal and hadal zones for scientific research
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
ACCESS the BLUE ECONOMY ALL OCEANS Engineering Ltd
 Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Alvin Debrief Summary Seven Cruises for 91 dives. Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos
 Seven Cruises for 91 dives Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos Overview All the PIs were very satisfied with their Alvin experience and felt that their scientific goals
Seven Cruises for 91 dives Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos Overview All the PIs were very satisfied with their Alvin experience and felt that their scientific goals
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Near-bottom Multibeam Surveys for Deep Sea Scientific Applications
 Near-bottom Multibeam Surveys for Deep Sea Scientific Applications Scott J. McCue Dana R. Yoerger Dept of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543
Near-bottom Multibeam Surveys for Deep Sea Scientific Applications Scott J. McCue Dana R. Yoerger Dept of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543
AUVs for oceanographic science at IFREMER, project progress and operational feedback
 AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
SHUTTLE-SUBs ALL OCEANS Engineering Ltd
 SUK Underwater Vehicles Conference 21.11.17 SHUTTLE-SUBs AC-ROV 3000m Fly-out System Introduced in 2011 MAC-ROV 6000m Fly-out System (2017) 6000m, 4k and HD cameras, SM fibre telemetry Expandable architecture,
SUK Underwater Vehicles Conference 21.11.17 SHUTTLE-SUBs AC-ROV 3000m Fly-out System Introduced in 2011 MAC-ROV 6000m Fly-out System (2017) 6000m, 4k and HD cameras, SM fibre telemetry Expandable architecture,
Marine Opera*ons Group Marine Technology Program SRI Interna*onal SRI International
 Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft.
Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft.
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology
 How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
Overview: Underwater sensing
 Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks
 In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV SYSTEM
 TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
R/V Point Sur Pre-Cruise Questionnaire
 R/V Point Sur Pre-Cruise Questionnaire Please fill this out and return at least 40 days prior to your cruise to ensure that all of your technical needs can be met BASIC INFO Purpose of Cruise: Submitter's
R/V Point Sur Pre-Cruise Questionnaire Please fill this out and return at least 40 days prior to your cruise to ensure that all of your technical needs can be met BASIC INFO Purpose of Cruise: Submitter's
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
In order to understand the ocean,
 VESSELS & VEHICLES A beacon of light shines from the cupola of WHOI s Bigelow Laboratory, built in 1930 and named for the Institution s first director, Henry Bigelow. Located in Woods Hole village, the
VESSELS & VEHICLES A beacon of light shines from the cupola of WHOI s Bigelow Laboratory, built in 1930 and named for the Institution s first director, Henry Bigelow. Located in Woods Hole village, the
Noise Experiment #2. Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA February 22 February 2010
 Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
Sentry debrief summaries
 Sentry debrief summaries - 2010 PI Project Ship Area Camilli Tracking Endeavor Gulf of MX oil plume (RAPID) German/Camilli /Yoerger Delaney/Kelley Gas hydrate stability OOI survey Merian Thompson Norwegian
Sentry debrief summaries - 2010 PI Project Ship Area Camilli Tracking Endeavor Gulf of MX oil plume (RAPID) German/Camilli /Yoerger Delaney/Kelley Gas hydrate stability OOI survey Merian Thompson Norwegian
Wave Glider: Liege Colloquium. Colloquium April 27
 The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
Location: Barkley Canyon Date: September 9, 2013 Constraints: none
 Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries
 N-ICE2015 Norwegian Young Sea ICE cruise 2015 141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries Kronprins Haakon Then and now Fincantieri Hull fabrication
N-ICE2015 Norwegian Young Sea ICE cruise 2015 141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries Kronprins Haakon Then and now Fincantieri Hull fabrication
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
Mohawk Remotely Operated Vehicle User s Guide
 Mohawk Remotely Operated Vehicle User s Guide Undersea Vehicles Program University of North Carolina at Wilmington 5600 Marvin Moss Lane Wilmington, NC 28409 http://www.uncw.edu/uvp Jason White Eric Glidden
Mohawk Remotely Operated Vehicle User s Guide Undersea Vehicles Program University of North Carolina at Wilmington 5600 Marvin Moss Lane Wilmington, NC 28409 http://www.uncw.edu/uvp Jason White Eric Glidden
Development of Nereid-UI: A Remotely Operated Underwater Vehicle for Oceanographic Access Under Ice
 Development of Nereid-UI: A Remotely Operated Underwater Vehicle for Oceanographic Access Under Ice Presented at the 9 th Annual Polar Technology Conference, 2-4 April 2013 Louis L. Whitcomb 1,2,Andrew
Development of Nereid-UI: A Remotely Operated Underwater Vehicle for Oceanographic Access Under Ice Presented at the 9 th Annual Polar Technology Conference, 2-4 April 2013 Louis L. Whitcomb 1,2,Andrew
DIVE PLAN Leg 1 Dive 11 Recover Wally 1
 DIVE PLAN Leg 1 Dive 11 Recover Wally 1 Page 1 of 6 Location: Barkley Canyon Date: 9 May, 2014 14:00 Constraints: Weather, Sufficient deck space ROV Dive # OE 114 Objectives Prepare Wally I cable for recovery
DIVE PLAN Leg 1 Dive 11 Recover Wally 1 Page 1 of 6 Location: Barkley Canyon Date: 9 May, 2014 14:00 Constraints: Weather, Sufficient deck space ROV Dive # OE 114 Objectives Prepare Wally I cable for recovery
The I-UTECH Consortium
 The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
The I-UTECH I-UTECH Consortium Consortium I-UTECH is a consortium made up of companies which have been operating for many years in the field of service and industrial underwater works. The search for highly
R/V HUGH R. SHARP University of Delaware 2016
 R/V HUGH R. SHARP R/V HUGH R. SHARP University of Delaware 2016 GENERAL DESCRIPTION: The R/V HUGH R. SHARP is an acoustically quiet, state of the art, general-purpose, regional class research vessel operated
R/V HUGH R. SHARP R/V HUGH R. SHARP University of Delaware 2016 GENERAL DESCRIPTION: The R/V HUGH R. SHARP is an acoustically quiet, state of the art, general-purpose, regional class research vessel operated
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
Regional Hydrographic Research, Studies & Projects
 Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
KAIREI Cruise Report. KR17-11 Leg2
 KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
Sensors and Platforms for Autonomous Undersea Systems
 Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Update on Canadian Research Vessels Ship Procurement Projects
 Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS)
") Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Tifft Water Supply Symposium
 Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
Autosub6000: A Deep Diving Long Range AUV
 Autosub6000: A Deep Diving Long Range AUV Stephen McPhail Underwater Systems Laboratory, National Marine Facilities Division National Oceanography Centre, Southampton European Way, Southampton, SO14 3ZH,
Autosub6000: A Deep Diving Long Range AUV Stephen McPhail Underwater Systems Laboratory, National Marine Facilities Division National Oceanography Centre, Southampton European Way, Southampton, SO14 3ZH,
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico.
 Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Development of 7,000m Class ROV KAIKO7000
 Development of 7,000m Class ROV KAIKO7000 H. Sezoko*, T. Murashima*, H. Nakajyoh*, H. Yoshida*, N. Yamauchi** * Research Support Department (RSD), Marine Technology Center (MARITEC) Japan Agency for Marine-Earth
Development of 7,000m Class ROV KAIKO7000 H. Sezoko*, T. Murashima*, H. Nakajyoh*, H. Yoshida*, N. Yamauchi** * Research Support Department (RSD), Marine Technology Center (MARITEC) Japan Agency for Marine-Earth
Alvin. The Deep Submergence Vehicle. An Advanced Platform for Direct Deep Sea Observation and Research. by W. Bruce Strickrott
 The Deep Submergence Vehicle Alvin An Advanced Platform for Direct Deep Sea Observation and Research by W. Bruce Strickrott WHOI 34 The Journal of Ocean Technology, Vol. 12, No. 1, 2017 The Journal of
The Deep Submergence Vehicle Alvin An Advanced Platform for Direct Deep Sea Observation and Research by W. Bruce Strickrott WHOI 34 The Journal of Ocean Technology, Vol. 12, No. 1, 2017 The Journal of
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Malta Survey activities
 Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY
 THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
August Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd.
 August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd. Gavia? Gavia immer (common loon; great northern diver) Autonomous
August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd. Gavia? Gavia immer (common loon; great northern diver) Autonomous
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
ISE Subsea Tools and Toolsleds
 1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
WOODS HOLE OCEANOGRAPHIC INSTITUTION WOODS HOLE, MA
 6500m HOV Project Stage 1: A-4500 HOV Document Control No.: 0000000 06-November-2009 WOODS HOLE OCEANOGRAPHIC INSTITUTION WOODS HOLE, MA 02543 Document Control Sheet Date Originator Description 09-15-09
6500m HOV Project Stage 1: A-4500 HOV Document Control No.: 0000000 06-November-2009 WOODS HOLE OCEANOGRAPHIC INSTITUTION WOODS HOLE, MA 02543 Document Control Sheet Date Originator Description 09-15-09
JAMSTEC trial of 11,000m UROV
 JAMSTEC trial of 11,000m UROV Representative : Kikuo Hashimot (Director) Presenting : Hidehiko Nakajoh Japan Agency for Marine Earth Science and Technology ( JAMSTEC ) 2-15 Natsushima-cho Yokosuka, Japan
JAMSTEC trial of 11,000m UROV Representative : Kikuo Hashimot (Director) Presenting : Hidehiko Nakajoh Japan Agency for Marine Earth Science and Technology ( JAMSTEC ) 2-15 Natsushima-cho Yokosuka, Japan
Recommended operating guidelines (ROG) for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:
 for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:") Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
WHOTS Mooring Subsurface Instrumentation
 UH Contributions to WHOTS-13 Cruise Report by Fernando Santiago-Mandujano, Daniel McCoy, Jefrey Snyder, R. Walter Deppe, Kellen Rosburg, Glenn Carter, Katrina Berry, and Roger Lukas WHOTS Mooring Subsurface
UH Contributions to WHOTS-13 Cruise Report by Fernando Santiago-Mandujano, Daniel McCoy, Jefrey Snyder, R. Walter Deppe, Kellen Rosburg, Glenn Carter, Katrina Berry, and Roger Lukas WHOTS Mooring Subsurface
SeaBotix Remotely Operated Vehicles
 Teledyne SeaBotix Product Overview Brochure SeaBotix Remotely Operated Vehicles Little Benthic Vehicles PROVEN CAPABLE RELIABLE ADAPTABLE PORTABLE INTUITIVE RUGGED Little Benthic Vehicles LEADING THE INDUSTRY
Teledyne SeaBotix Product Overview Brochure SeaBotix Remotely Operated Vehicles Little Benthic Vehicles PROVEN CAPABLE RELIABLE ADAPTABLE PORTABLE INTUITIVE RUGGED Little Benthic Vehicles LEADING THE INDUSTRY
NBP09-01 Cruise Report
 NBP09-01 Cruise Report Autosub3 Deployments in the Amundsen Sea RVIB Nathaniel B Palmer 5 January to 25 February 2009 Report compiled by Adrian Jenkins from the contributions of the Autosub science and
NBP09-01 Cruise Report Autosub3 Deployments in the Amundsen Sea RVIB Nathaniel B Palmer 5 January to 25 February 2009 Report compiled by Adrian Jenkins from the contributions of the Autosub science and
Schmidt Ocean Institute 4,500m ROV Development Survey #2
 Schmidt Ocean Institute 4,500m ROV Development Survey #2 This report was compiled based on a survey of international deep ocean research community representatives 2015 Table of Contents Executive Summary..3
Schmidt Ocean Institute 4,500m ROV Development Survey #2 This report was compiled based on a survey of international deep ocean research community representatives 2015 Table of Contents Executive Summary..3
 Side 1 av 7 Home > Diving Equipment > Side Scan Sonar > Imagenex Sidescan Sonar > Yellowfin Yellowfin Sidescan Sonar Magnetometers Side Scan Sonar Cameras Storm Cases Interferometric & Sidescan Equipment
Side 1 av 7 Home > Diving Equipment > Side Scan Sonar > Imagenex Sidescan Sonar > Yellowfin Yellowfin Sidescan Sonar Magnetometers Side Scan Sonar Cameras Storm Cases Interferometric & Sidescan Equipment
Testing and Evaluation of REMUS Vehicle Systems
 Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
3 Solutions Found for Irish Research Vessels. A CTD Davit design
 3 Solutions Found for Irish Research Vessels A CTD Davit design A Vibration Damping Solution Managing mooring chain on a small vessel Bill Dwyer, P&O Maritime Services Ltd Celtic Voyager & Celtic Explorer
3 Solutions Found for Irish Research Vessels A CTD Davit design A Vibration Damping Solution Managing mooring chain on a small vessel Bill Dwyer, P&O Maritime Services Ltd Celtic Voyager & Celtic Explorer
MAPCO2 Buoy Metadata Report Project Title:
 MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS
 SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
Instrument pucks. Copyright MBARI Michael Risi SIAM design review November 17, 2003
 Instrument pucks Michael Risi SIAM design review November 17, 2003 Instrument pucks Pucks and Plug-and-Work The MBARI puck prototype Puck software interface Pucks in practice (A Puck s Tale) Embedding
Instrument pucks Michael Risi SIAM design review November 17, 2003 Instrument pucks Pucks and Plug-and-Work The MBARI puck prototype Puck software interface Pucks in practice (A Puck s Tale) Embedding
Alvin de-brief summaries
 Alvin de-brief summaries - 2010-11 Four cruises Juan de Fuca Cascadia Gulf of Mexico 33 Alvin de-brief summaries - 2010-11 Pre-Cruise Planning: All PIs satisfied with planning in general with only a few
Alvin de-brief summaries - 2010-11 Four cruises Juan de Fuca Cascadia Gulf of Mexico 33 Alvin de-brief summaries - 2010-11 Pre-Cruise Planning: All PIs satisfied with planning in general with only a few
C-RESEARCHER SERIES THE ELITE IN EXPLORATION. 2-3 persons 480-2,000 meters
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2-3 persons 480-2,000 meters CHALLENGING LIMITS Join the elite explorers, challenge the deep and roam parts of the world only a lucky few have been before.
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2-3 persons 480-2,000 meters CHALLENGING LIMITS Join the elite explorers, challenge the deep and roam parts of the world only a lucky few have been before.
Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa
 Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
ATLANTIC EXPLORER with Dynamic Positioning System FULL SPECIFICATIONS
 ATLANTIC EXPLORER with Dynamic Positioning System FULL SPECIFICATIONS Multi Role Offshore Ship Atlantic Explorer Research Safety Rescue Cargo Survey Supply Standby Guard Ship Dive Support Accommodation
ATLANTIC EXPLORER with Dynamic Positioning System FULL SPECIFICATIONS Multi Role Offshore Ship Atlantic Explorer Research Safety Rescue Cargo Survey Supply Standby Guard Ship Dive Support Accommodation
NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader Community
 Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
C-RESEARCHER 3. 1,700 meters / 5,755 feet - 2 passengers, 1 pilot
 C-RESEARCHER 3 1,700 meters / 5,755 feet - 2 passengers, 1 pilot 2 3 4 C-RESEARCHER 3 Private submersibles have always offered a unique way to explore the world s oceans. Unlike a remotely-operated vehicle,
C-RESEARCHER 3 1,700 meters / 5,755 feet - 2 passengers, 1 pilot 2 3 4 C-RESEARCHER 3 Private submersibles have always offered a unique way to explore the world s oceans. Unlike a remotely-operated vehicle,
SEAHORSES and SUBMARINES Testing transformational capabilities with modern UUVs at NAVOCEANO by Craig A. Peterson and Martha E. M.
 SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle
 Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles
 Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
Hydrographic Surveying at The Port of London
 Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System
 Light Fiber Tether System") Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Survey solutions. catalogue DEEP INSIGHT. SHARPER SENSES.
 Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
TRIUMPH Submersible Technical Overview 3-Person Vessel, 457m Depth Rated, ABS Classed
 TRIUMPH Submersible Technical Overview 3-Person Vessel, 457m Depth Rated, ABS Classed Date: November 19, 2010 Produced By: SEAmagine Hydrospace Corporation 1420 N. Claremont Blvd., #111-A Claremont, CA
TRIUMPH Submersible Technical Overview 3-Person Vessel, 457m Depth Rated, ABS Classed Date: November 19, 2010 Produced By: SEAmagine Hydrospace Corporation 1420 N. Claremont Blvd., #111-A Claremont, CA
Fault Diagnosis based on Particle Filter - with applications to marine crafts
 1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
AANDERAA. Measuring: Current Speed Current Direction Temperature
 AANDERAA Doppler Current Meter A state-of-the-art Recording Current Meter designed for deep sea operation down to 6000 meters Measuring: Current Speed Current Direction Temperature Optional: Conductivity
AANDERAA Doppler Current Meter A state-of-the-art Recording Current Meter designed for deep sea operation down to 6000 meters Measuring: Current Speed Current Direction Temperature Optional: Conductivity
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Application for Consent to Conduct Marine Scientific Research. F Internal Waves in Straits (IWISE) Institution Contact Information Director
 Institution Contact Information Director") 1. General Information 1.1 Reference ID: Application for Consent to Conduct Marine Scientific Research Application number: Project name: F2010-111 Internal Waves in Straits (IWISE) 1.2 Sponsoring institution(s):
1. General Information 1.1 Reference ID: Application for Consent to Conduct Marine Scientific Research Application number: Project name: F2010-111 Internal Waves in Straits (IWISE) 1.2 Sponsoring institution(s):
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
Table of Contents Seabird 9Plus CTD Components and Overview... 2 CTD Deployment\Recovery Procedure... 7
 Seabird CTD overview and Deployment Standard Operating Procedures (SOPs) Gordon Furey P&O Maritime Table of Contents Seabird 9Plus CTD Components and Overview... 2 CTD Deployment\Recovery Procedure...
Seabird CTD overview and Deployment Standard Operating Procedures (SOPs) Gordon Furey P&O Maritime Table of Contents Seabird 9Plus CTD Components and Overview... 2 CTD Deployment\Recovery Procedure...