BACKGROUND TO STUDY CASE
|
|
|
- Josephine Boyd
- 5 years ago
- Views:
Transcription
1
 was launched Due do a technical problems it was not possible to recover the payload")

2 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems it was not possible to recover the payload using a vessel positioned 22 nautical miles from the planned impact center. When the vessel arrived the calculated impact center, the payload had sunk. The impact zone is expected to be at N and E. Water depth at this position is estimated to be about 2700 m.

3 Rocket Payload Location
4 Proposed Methodology for the Literature Review Literature Review Project Case Study Case Study Weather Windows Weather Windows Concept/Theory Calculations AUV AUV Definition of AUV Functional, Type etc ROV ROV Definition of ROV Functional, Type etc Find a method for localizations and retrieving the payload and give a brief estimate of necessary weather windows for the payload retrieval operation. Retrieval Procedure Retrieval Procedure Options Options Retrieval Procedure Retrieval Procedure Summary and Summary and Conclusion Conclusion
5 WEATHER WINDOWS Marine Operations may always be affected and delayed by severe or even moderate weather conditions. Defined the operability of wave height for the operation (governed by design code such as DNV, NORSOK) Assumed and will be used for our operations
6 WEATHER WINDOWS Defined the probability of failure (Assumption : Seastate have the same probability of exceedance have the same duration of statistics) Payload was falling on October - winter season (the blue curve) Requirement : Hs=2m at least 24 hours H s =2m The CDF of Hs taken from Statfjord Design Basis
7 WEATHER WINDOWS Continued: P(Hs) = P(2.0) = 0.5 Means: 50% of the time we will have wave conditions with Hs below 2.0m Average duration of period with Hs below these thresholds (eq. 2.6 in Kompendium) = 26.5 hours τ c Introducing eq.2.11 and eq.2.4 (in Kompendium), and by setting duration of calm period 48 hours, we obtained : P(t) = P(48) = 0.63 Means: 63% of the time duration of calm period less than 48 hours. Overall Conclusion : Doing the operation in the month of October was not the best solution (in fact, worse) To improve the probability, there s no other way than making a proper planning before performed the operation such that we can finish it as earliest as possible.
 for certain")
8 AUTONOMOUS UNDERWATER VEHICLE (AUV) An unmanned torpedo vehicle (robotic) that has capability to explore the subsea without physical connection to the surface Can carry its own energy, battery and equipment (AUV payload) for certain mission
9 AUTONOMOUS UNDERWATER VEHICLE (AUV) Key issues to determine the characteristics AUV that we required Sensors or other hardware must the AUV carry as payload? Mission : Localize the rocket payload Basic equipment : AUV sonar sensor At what water depth will the AUV operate? Rocket payload was fallen in 2700 w.d. This will determine the thickness and construction of the compartments/hull At what speed will the AUV operate? Normally 3-5 knots Depend on the energy provided by the battery and the duration of the mission. For how long will the AUV operate? Depend on the speed, energy provided by the battery and the mission goals.

10 AUTONOMOUS UNDERWATER VEHICLE (AUV) Brief of Specs : Diameter : 27 in / 0.69 m Length : 21.4 ft / 6.5 m Max. depth : ft / 3500 m Weight in air : 3800 lb / 1720 kg Hull : Aluminum 7175-T74 Battery : 24.3 kwh lithium ion ISE Hydroplanes : 5 independent Thruster : brushless dc, oil compensated Cruise speed : 3.9 kts / 2.0 m/s Range at cruise : 80 nm / 149 km Maximum speed : 4.9 kts / 2.5 m/s Minimum speed : 1.9 kts / 1.0 m/s Payload Sensor : Seabird SBE19CTD Simrad EM /200kHz (Multibeam sonar) Marine sonic 600kHz (Sea Scan Sonar)

11 REMOTELY OPERATED VEHICLES (ROV)
12 REMOTELY OPERATED VEHICLES (ROV) An remotely vehicle (robotic) Required an operator on the vessel surface to operate the vehicle. Basically ROV consist of: - Cable links to provide the electric power and control commands (called thether, sometimes also with the TMS) - Deployment unit - The operator/pilot and control station on the surface ROV have operational phase: - Pre-launch preparation - Launching - Water entry - Transit to work site - Work site preparation - Transit form the work site - Hook-up, lifting, securing on the deck

")

13 REMOTELY OPERATED VEHICLES (ROV) Brief of ROV with TMS Operational Phase
 : 7 functions w/ force feedback (300lbs ISE Magnum extension) : 7 functions (600lbs lift at")
14 REMOTELY OPERATED VEHICLES (ROV) Brief of specs (ROPOS) Type : Electro-Hydraulic Work-Class ROV Depth Capability : 5000 meters Dimensions : 1.75m x 2.6m x 1.45m Motor : 40 HP Thrusters : 2 fore-aft, 2 vertical, 2 lateral Camera Kraft Raptor lift at full extension) : 7 functions w/ force feedback (300lbs ISE Magnum extension) : 7 functions (600lbs lift at full Depth : Parascientific Altimeter : Kongsberg Simrad KHz Sonar : Simrad MS KHz digital sonar Weight : 5800 lbs With an operating depth of 5000 meters, this system configuration requires a 96,000 Lbs (43,636 Kgs) Winch and a 12,000 Lbs (5454 Kgs) cage.

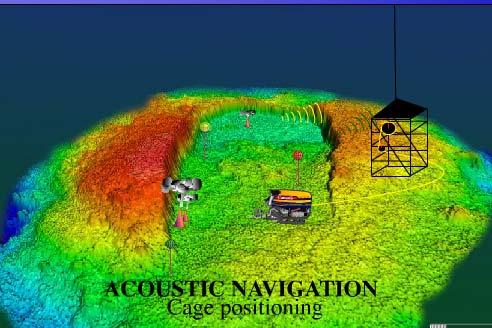
15 Retrieval Concept Using Elevator Surface Ship Surface Ship Autonomous Elevator system Floats Elevator Steel weight Media ROV Cabled ROV system


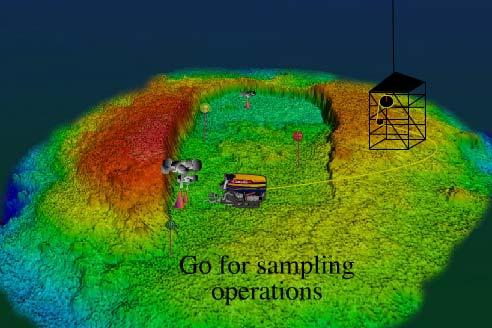
16 Elevators are designed to descend to the ocean floor and return to the surface without a cable attached (autonomously). Before released from surface ship, it armed with a steel weight that makes the system sinks to the bottom. Navigator estimates where on the surface the elevator should be released so that it lands on the bottom nearby the site to be sampled. When sampling is complete, an acoustic signal is sent sub sea by the navigator that triggers a burn-wire release, the weight is dropped and the elevator returns to the surface. The elevator is recovered by the surface ship or by small boat. Steel weight stack and weight dropper

17 Framework of Elevator The top and the bottom sections of the elevator is permanently welded subassemblies. Four upright frames are added to complete the basic structure. The upper framework supports a number of floatation spheres. The top is smaller than the bottom to reduce drag and collapse. The spheres and the acoustic transponder are attached to the frame with stainless steel hose clamps. The Transponder communicates with a ship Transducer and an LBL (long baseline) navigation network to allow tracking by navigators. The transponder also has the ability to burn a wire and release the elevator s ballast weight. The lower framework section is made wide for some stability and increased drag. It normally consists of the sample baskets and bins, sampling devices, device triggers, manual pull pins, a burn-wire weight dropper and an expendable steel descent weight. Additional hose clamps and custom mounting hardware are screwed onto the lower frame to secure sampling devices. Lower framework with bin lids open

18 Deployment & Recovery procedure Deployments begin with the elevator secured to the deck by tie-downs. People on watch recheck to ensure that it has been properly tested and armed. The lift line of the crane will bear the load of the elevator as it is deployed. The crane takes the load, tie-downs are removed, tags are controlled, and the elevator is lifted, swung overboard and lowered until it is awash. The deck chief signals for the stainless pin to be yanked from the cat s cradle, the lift line slips from around the frame and the elevator leaves the surface on a steady descent toward the bottom. Elevators are rarely recovered after dark. The can be equipped with relocation devices such as a radio frequency (RF) beacon and strobe. For most recoveries a small boat is made ready with a tow line and launched prior to the released command being sent. The small boat crew will be responsible for towing the surface elevator back to the crane so they should be experienced and thoroughly briefed about the recovery operations.
19 SUMMARY AND CONCLUSION Weather will become our limitation Localized the position of the rocket payload in the seafloor using AUV with sonar system. Retrieved the rocket payload using a ROV with elevator.
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
ACCESS the BLUE ECONOMY ALL OCEANS Engineering Ltd
 Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic
 Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic R. Tonnessen* (Petroleum Geo-Services) & T. Skadberg (Petroleum Geo- Services) SUMMARY
Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic R. Tonnessen* (Petroleum Geo-Services) & T. Skadberg (Petroleum Geo- Services) SUMMARY
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV SYSTEM
 TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
0TMS Design and analysis of ITB ultra deep ROV
 0TMS Design and analysis of ITB ultra deep ROV Muljowidodo K. 1, Nico Prayogo 2 & Sapto Adi Nugroho 3 1 Faculty of Mechanical and Aerospace Engineering, Institut Teknologi Bandung (ITB) Jl. Ganesha 10,
0TMS Design and analysis of ITB ultra deep ROV Muljowidodo K. 1, Nico Prayogo 2 & Sapto Adi Nugroho 3 1 Faculty of Mechanical and Aerospace Engineering, Institut Teknologi Bandung (ITB) Jl. Ganesha 10,
SHUTTLE-SUBs ALL OCEANS Engineering Ltd
 SUK Underwater Vehicles Conference 21.11.17 SHUTTLE-SUBs AC-ROV 3000m Fly-out System Introduced in 2011 MAC-ROV 6000m Fly-out System (2017) 6000m, 4k and HD cameras, SM fibre telemetry Expandable architecture,
SUK Underwater Vehicles Conference 21.11.17 SHUTTLE-SUBs AC-ROV 3000m Fly-out System Introduced in 2011 MAC-ROV 6000m Fly-out System (2017) 6000m, 4k and HD cameras, SM fibre telemetry Expandable architecture,
Original URI Scanfish MKII
 Scanfish MKII URI s Scanfish MKII Sensors include CTD, Fluorometer, Dissolved Oxygen and Seabird Fast Temperature and Conductivity Sensors logging at 400 Hz and sending 50 Hz data via 9600 Baud uplink
Scanfish MKII URI s Scanfish MKII Sensors include CTD, Fluorometer, Dissolved Oxygen and Seabird Fast Temperature and Conductivity Sensors logging at 400 Hz and sending 50 Hz data via 9600 Baud uplink
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System
 Light Fiber Tether System") Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Saab Seaeye Cougar XT Compact
 The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions
 Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
List of modifications
 PS 2000 Version: 2 Page 0 sur 9 List of Diffusion Name Company Number of For For Copies Information Action Onofri PSI 1 *** Bureau Véritas 1 *** Affaires Maritimes CEO 1 *** Affaires Maritimes CCS 1 ***
PS 2000 Version: 2 Page 0 sur 9 List of Diffusion Name Company Number of For For Copies Information Action Onofri PSI 1 *** Bureau Véritas 1 *** Affaires Maritimes CEO 1 *** Affaires Maritimes CCS 1 ***
Chapter 9: Sea operations
 Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
HP Sport Sub meters. High performance diving. U-Boat Worx
 HP Sport Sub 2 100 meters High performance diving U-Boat Worx A new way of Diving Take diving to the next level. The HP Sport Sub 2 is the first fully certified submersible featuring compact size, high
HP Sport Sub 2 100 meters High performance diving U-Boat Worx A new way of Diving Take diving to the next level. The HP Sport Sub 2 is the first fully certified submersible featuring compact size, high
Isis Deployment. TMS and Live Boating. Inmartech08. Dave Turner Operations Co-ordinator.
 Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Geo-Vibro Corer
 High Frequency Vibro Coring System Operational Features Proven performance & high quality cores 30 kn impulse at 30 Hz for fast penetration Reliable, lightweight & cost effective Modular construction (cores
High Frequency Vibro Coring System Operational Features Proven performance & high quality cores 30 kn impulse at 30 Hz for fast penetration Reliable, lightweight & cost effective Modular construction (cores
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test
 NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
AUVs for oceanographic science at IFREMER, project progress and operational feedback
 AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
Location: Barkley Canyon Date: September 9, 2013 Constraints: none
 Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
Development of 7,000m Class ROV KAIKO7000
 Development of 7,000m Class ROV KAIKO7000 H. Sezoko*, T. Murashima*, H. Nakajyoh*, H. Yoshida*, N. Yamauchi** * Research Support Department (RSD), Marine Technology Center (MARITEC) Japan Agency for Marine-Earth
Development of 7,000m Class ROV KAIKO7000 H. Sezoko*, T. Murashima*, H. Nakajyoh*, H. Yoshida*, N. Yamauchi** * Research Support Department (RSD), Marine Technology Center (MARITEC) Japan Agency for Marine-Earth
PSI France DESCRIPTION Mise à Jour : 02/09/02 SMAL202 Version : 0 Page 1 sur 9
 SMAL202 Version : 0 Page 1 sur 9 1. SUMMARY SPECIFICATIONS...2 2. PERSONNEL COMPARTMENT...3 3. BATTERY...4 4. 120V DISTRIBUTION...4 5. 24V DISTRIBUTION...5 6. THRUSTERS...5 7. PROJECTORS...5 8. AIR DISTRIBUTION...5
SMAL202 Version : 0 Page 1 sur 9 1. SUMMARY SPECIFICATIONS...2 2. PERSONNEL COMPARTMENT...3 3. BATTERY...4 4. 120V DISTRIBUTION...4 5. 24V DISTRIBUTION...5 6. THRUSTERS...5 7. PROJECTORS...5 8. AIR DISTRIBUTION...5
Fully Submersible Heavy Lift Vessel
 Fully Submersible Heavy Lift Vessel Arnbjorn Joensen Oil and Gas Authority (OGA) (15th February 2016) CONTENT Leadon structures demobilisation Competitiveness (case studies) Decommissioning options Installation
Fully Submersible Heavy Lift Vessel Arnbjorn Joensen Oil and Gas Authority (OGA) (15th February 2016) CONTENT Leadon structures demobilisation Competitiveness (case studies) Decommissioning options Installation
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Sensor Platform Project Marine Trials Bidders Conference. Fundy Ocean Research Center for Energy fundyforce.ca
 Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
MODEL ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT
 MODEL 862-000-200 ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT DOCUMENT NO. 430-007H September 20, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875 BROADWAY
MODEL 862-000-200 ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT DOCUMENT NO. 430-007H September 20, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875 BROADWAY
Surface Rescue Swimmer Course. Inanimate Object Recovery Lesson Topic 4.10
 Surface Rescue Swimmer Course Inanimate Object Recovery Lesson Topic 4.10 2005 1 Enabling objectives: List the procedures for recovering a REXTORP/Drone. List the safety precautions for recovering a REXTORP/Drone.
Surface Rescue Swimmer Course Inanimate Object Recovery Lesson Topic 4.10 2005 1 Enabling objectives: List the procedures for recovering a REXTORP/Drone. List the safety precautions for recovering a REXTORP/Drone.
MODEL DIGITAL ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.5 TO 100FT (0.15 TO 30M) OPERATING RANGE SERIAL OUTPUT
 OPERATING RANGE SERIAL OUTPUT") MODEL 863-000-200 DIGITAL ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.5 TO 100FT (0.15 TO 30M) OPERATING RANGE SERIAL OUTPUT DOCUMENT NO. 430-017C April 14, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875
MODEL 863-000-200 DIGITAL ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.5 TO 100FT (0.15 TO 30M) OPERATING RANGE SERIAL OUTPUT DOCUMENT NO. 430-017C April 14, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Yokosuka Cruise Report YK11-02
 Yokosuka Cruise Report YK11-02 Sea Trial of The HETL Fuel Cell System for Underwater Platform JAMSTEC ~ Sagami-Bay ~ JAMSTEC March 6, 2011 ~ March 9, 2011 Japan Agency for Marine-Earth Science and Technology
Yokosuka Cruise Report YK11-02 Sea Trial of The HETL Fuel Cell System for Underwater Platform JAMSTEC ~ Sagami-Bay ~ JAMSTEC March 6, 2011 ~ March 9, 2011 Japan Agency for Marine-Earth Science and Technology
The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300. Wolfgang Burnside
 The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300 Wolfgang Burnside TRV-005 Series: Standard Features and Benefits Frame The TRV 005 Series
The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300 Wolfgang Burnside TRV-005 Series: Standard Features and Benefits Frame The TRV 005 Series
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
CB-40 Data Buoy Quick Start Guide
 CB-40 Data Buoy Quick Start Guide The NexSens CB-40 Data Buoy offers a compact and affordable platform for deploying water quality sondes and other instruments that integrate power and data logging. The
CB-40 Data Buoy Quick Start Guide The NexSens CB-40 Data Buoy offers a compact and affordable platform for deploying water quality sondes and other instruments that integrate power and data logging. The
HIPER SUB SERIES THE FASTEST PRIVATE SUBMARINES. 2-4 persons 100 meters
 HIPER SUB SERIES THE FASTEST PRIVATE SUBMARINES 2-4 persons 100 meters READY FOR ADVENTURE Are you ready for the fastest underwater adventure? Buckle up and dive in a two- or four-person HiPer Sub. Just
HIPER SUB SERIES THE FASTEST PRIVATE SUBMARINES 2-4 persons 100 meters READY FOR ADVENTURE Are you ready for the fastest underwater adventure? Buckle up and dive in a two- or four-person HiPer Sub. Just
KAIREI Cruise Report. KR17-11 Leg2
 KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
SUPER YACHT SUB SERIES
 SUPER YACHT SUB SERIES THE ULTIMATE LUXURY SUBMERSIBLE 3 OCCUPANTS 100M 500M The Ultimate in Superyacht Luxury Compact and luxurious private submarines especially designed to fit aboard superyachts, the
SUPER YACHT SUB SERIES THE ULTIMATE LUXURY SUBMERSIBLE 3 OCCUPANTS 100M 500M The Ultimate in Superyacht Luxury Compact and luxurious private submarines especially designed to fit aboard superyachts, the
NAVIGATOR PROP BUILDING INSTRUCTIONS & PHOTOS
 NAVIGATOR PROP BUILDING INSTRUCTIONS & PHOTOS Science under the ice Ice sheet At regional competitions the ice is simulated by 8 ft x 4 ft ½-inch foam sheeting (Home Depot part #703990 [in store only],
NAVIGATOR PROP BUILDING INSTRUCTIONS & PHOTOS Science under the ice Ice sheet At regional competitions the ice is simulated by 8 ft x 4 ft ½-inch foam sheeting (Home Depot part #703990 [in store only],
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
Noise Experiment #2. Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA February 22 February 2010
 Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
Development of Self-Installing Deepwater Spar. Ashit Jadav February 2017
 Development of Self-Installing Deepwater Spar Ashit Jadav February 2017 Contents Introduction & Background ACE Spar breakdown Installation Sequence Main particulars, Hull design and Weight control Stability
Development of Self-Installing Deepwater Spar Ashit Jadav February 2017 Contents Introduction & Background ACE Spar breakdown Installation Sequence Main particulars, Hull design and Weight control Stability
Alvin Debrief Summary Seven Cruises for 91 dives. Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos
 Seven Cruises for 91 dives Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos Overview All the PIs were very satisfied with their Alvin experience and felt that their scientific goals
Seven Cruises for 91 dives Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos Overview All the PIs were very satisfied with their Alvin experience and felt that their scientific goals
Fully Submersible Heavy Lift Vessel
 Fully Submersible Heavy Lift Vessel Arnbjorn Joensen Aberdeen Maritime Branch (28th January 2015) PRESENTATION Introduction to the Subsea Deployment Vessel Installation method Tank test video Potential
Fully Submersible Heavy Lift Vessel Arnbjorn Joensen Aberdeen Maritime Branch (28th January 2015) PRESENTATION Introduction to the Subsea Deployment Vessel Installation method Tank test video Potential
141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries
 N-ICE2015 Norwegian Young Sea ICE cruise 2015 141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries Kronprins Haakon Then and now Fincantieri Hull fabrication
N-ICE2015 Norwegian Young Sea ICE cruise 2015 141 cruise days 3100 researcher days 68 researchers 32 international 15 institutes 10 countries Kronprins Haakon Then and now Fincantieri Hull fabrication
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Wave Glider: Liege Colloquium. Colloquium April 27
 The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY
 THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
ISE Subsea Tools and Toolsleds
 1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
Response Boat & Barge
 Response Boat & Barge Oil Spill Equipment Floating Barriers Incinerators ELASTEC INLANDER BOAT & BARGE Work Horse of the Waterways With the speed of a thoroughbred and the strength of a draft horse, the
Response Boat & Barge Oil Spill Equipment Floating Barriers Incinerators ELASTEC INLANDER BOAT & BARGE Work Horse of the Waterways With the speed of a thoroughbred and the strength of a draft horse, the
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
For ELECTRIC ANCHOR WINCH Models: T Pontoon 35 T sw Salt Water Series Coastal 35
 INSTALLATION AND OPERATING INSTRUCTIONS ANCHOR WINCHES For ELECTRIC ANCHOR WINCH Models: T10109-35 Pontoon 35 T10102-35sw Salt Water Series Coastal 35 If you have any questions or difficulty installing
INSTALLATION AND OPERATING INSTRUCTIONS ANCHOR WINCHES For ELECTRIC ANCHOR WINCH Models: T10109-35 Pontoon 35 T10102-35sw Salt Water Series Coastal 35 If you have any questions or difficulty installing
Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa
 Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
"Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider"
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science
 Moorings: New Capabilities for Seagoing Science") Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
For ANCHOR WINCH Model: T Big Water 45 T sw Salt Water Series Big Water 45
 INSTALLATION AND OPERATING INSTRUCTIONS ANCHOR WINCHES For ANCHOR WINCH Model: T10110-45 Big Water 45 T10103-45sw Salt Water Series Big Water 45 If you have any questions or difficulty installing this
INSTALLATION AND OPERATING INSTRUCTIONS ANCHOR WINCHES For ANCHOR WINCH Model: T10110-45 Big Water 45 T10103-45sw Salt Water Series Big Water 45 If you have any questions or difficulty installing this
!"#$%&'()*$+,,($-!.#$/*)0*122$!13)*4$
*$+,,($-!.#$/*)0*122$!13)*4$") In collaboration with WHOI NDSF and DeepSea Challenger, develop a technologically advanced 11k HROV (ROV or AUV) for R/V Falkor, supporting: Robust access to abyssal and hadal zones for scientific research
In collaboration with WHOI NDSF and DeepSea Challenger, develop a technologically advanced 11k HROV (ROV or AUV) for R/V Falkor, supporting: Robust access to abyssal and hadal zones for scientific research
RESULTS FROM PARACHUTE SEA ANCHOR DRAG TESTS FOR A SPACE CAPSULE, Jan. 10, 2013
 FIORENTINO Technical Report FPA-152 Report Prepared for: America s next generation of spacecraft A spacecraft can be a diameter of 16.5-foot and weigh 18,000 lbs. at splashdown. When the parachute sea
FIORENTINO Technical Report FPA-152 Report Prepared for: America s next generation of spacecraft A spacecraft can be a diameter of 16.5-foot and weigh 18,000 lbs. at splashdown. When the parachute sea
Information Alkmaar Class Mine Hunters
 Information Alkmaar Class Mine Hunters 1. General information All four available ships have been built by: Van der Giessen-de Noord, Alblasserdam, The Netherlands. Haarlem commissioned 12 Jan 1984 decommissioned
Information Alkmaar Class Mine Hunters 1. General information All four available ships have been built by: Van der Giessen-de Noord, Alblasserdam, The Netherlands. Haarlem commissioned 12 Jan 1984 decommissioned
Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President
 Orientation By: Nick Lowell, Founder & President") Lowell Instruments Application Note #TCMA Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President 1 Introduction The TCM-1 Tilt Current Meter (TCM)
Lowell Instruments Application Note #TCMA Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President 1 Introduction The TCM-1 Tilt Current Meter (TCM)
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010)
") RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
Ice Class AUV Development Art Kleiner & Jami Cheramie, C & C Technologies, Inc.; Jeremy Dean & Robert Raye, Shell
 OTC 22121 Ice Class AUV Development Art Kleiner & Jami Cheramie, C & C Technologies, Inc.; Jeremy Dean & Robert Raye, Shell Copyright 2011, Offshore Technology Conference This paper was prepared for presentation
OTC 22121 Ice Class AUV Development Art Kleiner & Jami Cheramie, C & C Technologies, Inc.; Jeremy Dean & Robert Raye, Shell Copyright 2011, Offshore Technology Conference This paper was prepared for presentation
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System
 Light Fiber Tether System") Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
PRESTIGE OIL RECOVERY FROM THE SUNKEN PART OF THE WRECK Massimo Fontolan, Sonsub Ltd., Robin Galletti, SATE srl. Introduction
 PRESTIGE OIL RECOVERY FROM THE SUNKEN PART OF THE WRECK Massimo Fontolan, Sonsub Ltd., Robin Galletti, SATE srl. Introduction This lecture deals with the equipment developed and the experience gained during
PRESTIGE OIL RECOVERY FROM THE SUNKEN PART OF THE WRECK Massimo Fontolan, Sonsub Ltd., Robin Galletti, SATE srl. Introduction This lecture deals with the equipment developed and the experience gained during
DEEPFLIGHT HIGH PERFORMANCE PERSONAL SUBMARINES
 DEEPFLIGHT HIGH PERFORMANCE PERSONAL SUBMARINES Ushering in a New Era of Ocean Adventure With 94% of the oceans being unexplored, every dive provides the opportunity to see sights no human has ever seen
DEEPFLIGHT HIGH PERFORMANCE PERSONAL SUBMARINES Ushering in a New Era of Ocean Adventure With 94% of the oceans being unexplored, every dive provides the opportunity to see sights no human has ever seen
INTERNATIONAL HYDROGRAPHIC REVIEW MAY 2015
 OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
CB-50 Data Buoy Quick Start Guide
 CB-50 Data Buoy Quick Start Guide The NexSens CB-50 Data Buoy is designed for quick deployment in emergency response situations including industrial spills and natural disasters. The buoy can be deployed
CB-50 Data Buoy Quick Start Guide The NexSens CB-50 Data Buoy is designed for quick deployment in emergency response situations including industrial spills and natural disasters. The buoy can be deployed
AUV FOR SEARCH & RESCUE AT SEA AN INNOVATIVE APPROACH
 AUV FOR SEARCH & RESCUE AT SEA AN INNOVATIVE APPROACH Sathyaram Venkatesan Third Year - B Tech Electronics Communication Engineering SRM University, Kattankulathur, Tamilnadu 603203 India v.sathyaram@gmail.com
AUV FOR SEARCH & RESCUE AT SEA AN INNOVATIVE APPROACH Sathyaram Venkatesan Third Year - B Tech Electronics Communication Engineering SRM University, Kattankulathur, Tamilnadu 603203 India v.sathyaram@gmail.com
ULMATEC LAUNCH AND RECOVERY SYSTEMS
 M L U NC LAU MS ERY V ECO DR N HA C E AT TE SYS S R LA ULMATEC LAUNCH AND RECOVERY SYSTEMS Ulmatec develops efficient, safe and robust solutions for handling remotely operated vehicles (ROVs) from ships
M L U NC LAU MS ERY V ECO DR N HA C E AT TE SYS S R LA ULMATEC LAUNCH AND RECOVERY SYSTEMS Ulmatec develops efficient, safe and robust solutions for handling remotely operated vehicles (ROVs) from ships
JAMSTEC trial of 11,000m UROV
 JAMSTEC trial of 11,000m UROV Representative : Kikuo Hashimot (Director) Presenting : Hidehiko Nakajoh Japan Agency for Marine Earth Science and Technology ( JAMSTEC ) 2-15 Natsushima-cho Yokosuka, Japan
JAMSTEC trial of 11,000m UROV Representative : Kikuo Hashimot (Director) Presenting : Hidehiko Nakajoh Japan Agency for Marine Earth Science and Technology ( JAMSTEC ) 2-15 Natsushima-cho Yokosuka, Japan
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads
 Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads Carrick Detweiler, Stefan Sosnowski, Iuliu Vasilescu, and Daniela Rus Computer Science and Artificial Intelligence
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads Carrick Detweiler, Stefan Sosnowski, Iuliu Vasilescu, and Daniela Rus Computer Science and Artificial Intelligence
RV Southern Surveyor program
 2011 RV Southern Surveyor program voyageplan SS2011_c01 Tsunami Detection Buoy Maintenance for Australian Tsunami Warning System (ATWS) Itinerary Mobilise 0700 Sydney, Tuesday 5 April 2011 Depart Sydney
2011 RV Southern Surveyor program voyageplan SS2011_c01 Tsunami Detection Buoy Maintenance for Australian Tsunami Warning System (ATWS) Itinerary Mobilise 0700 Sydney, Tuesday 5 April 2011 Depart Sydney
C-RESEARCHER SERIES THE ELITE IN EXPLORATION. 2-3 persons 480-2,000 meters
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2-3 persons 480-2,000 meters CHALLENGING LIMITS Join the elite explorers, challenge the deep and roam parts of the world only a lucky few have been before.
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2-3 persons 480-2,000 meters CHALLENGING LIMITS Join the elite explorers, challenge the deep and roam parts of the world only a lucky few have been before.
Figure 1: Level Pitch Positive Pitch Angle Negative Pitch Angle. Trim: The rotation of a vehicle from side to side. See Figure 2.
 Buoyancy, Stability, and Ballast 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication,
Buoyancy, Stability, and Ballast 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication,
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
Marine Opera*ons Group Marine Technology Program SRI Interna*onal SRI International
 Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft.
Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft.
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
EXPLORE THE DEEP SUBMERSIBLES OVERVIEW
 EXPLORE THE DEEP SUBMERSIBLES OVERVIEW A NEW HORIZON For centuries, mankind has explored and conquered the surface of the world s oceans. In more recent times we have started to unmask the mysteries beneath
EXPLORE THE DEEP SUBMERSIBLES OVERVIEW A NEW HORIZON For centuries, mankind has explored and conquered the surface of the world s oceans. In more recent times we have started to unmask the mysteries beneath
MLV Mast Series Sectional Tripod Mast, 10-34m (32-110ft)
") MLV Mast Series Sectional Tripod Mast, 10-34m (32-110ft) Overview Fully deployed heights of 10, 15, 20, 30 and 34m (32, 49, 65, 98 and 110ft) Heavy duty composite sectional tripod masts capable of supporting
MLV Mast Series Sectional Tripod Mast, 10-34m (32-110ft) Overview Fully deployed heights of 10, 15, 20, 30 and 34m (32, 49, 65, 98 and 110ft) Heavy duty composite sectional tripod masts capable of supporting
R/V HUGH R. SHARP University of Delaware 2016
 R/V HUGH R. SHARP R/V HUGH R. SHARP University of Delaware 2016 GENERAL DESCRIPTION: The R/V HUGH R. SHARP is an acoustically quiet, state of the art, general-purpose, regional class research vessel operated
R/V HUGH R. SHARP R/V HUGH R. SHARP University of Delaware 2016 GENERAL DESCRIPTION: The R/V HUGH R. SHARP is an acoustically quiet, state of the art, general-purpose, regional class research vessel operated
INSTALLATION AND OPERATING INSTRUCTIONS. T10219-AD Deckboat 40 with AutoDeploy and Wireless Remote Control
 INSTALLATION AND OPERATING INSTRUCTIONS ANCHOR WINCH T10219-AD Deckboat 40 with AutoDeploy and Wireless Remote Control If you have any questions or difficulty installing this product, we are here to help!
INSTALLATION AND OPERATING INSTRUCTIONS ANCHOR WINCH T10219-AD Deckboat 40 with AutoDeploy and Wireless Remote Control If you have any questions or difficulty installing this product, we are here to help!
QUICK START GUIDE CB-450 DATA BUOY PLATFORM
 What s Included (1) Buoy hull with data well, 450 lb buoyancy (1) Buoy tower (3) 10W Solar panels (1) Data well lid (isic-cb or pass-through) (3) Top-side lifting eyes (3) Bottom-side mooring eyes (1)
What s Included (1) Buoy hull with data well, 450 lb buoyancy (1) Buoy tower (3) 10W Solar panels (1) Data well lid (isic-cb or pass-through) (3) Top-side lifting eyes (3) Bottom-side mooring eyes (1)
FAST SUPPLY INTERVENTION and CREW TRANSFER VESSEL M P 6 2 5
 FAST SUPPLY INTERVENTION and CREW TRANSFER VESSEL M P 6 2 5 MAIN PARTICULARS LENGTH OVER ALL 60.68 m LENGTH WATER LINE 59.35 m BREADTH MAX 20.80 m DRAUGHT MAX 3.10 m DEPTH 6.70 m MAX SPEED 37.0 knots @
FAST SUPPLY INTERVENTION and CREW TRANSFER VESSEL M P 6 2 5 MAIN PARTICULARS LENGTH OVER ALL 60.68 m LENGTH WATER LINE 59.35 m BREADTH MAX 20.80 m DRAUGHT MAX 3.10 m DEPTH 6.70 m MAX SPEED 37.0 knots @
The Development of a Highly Maneuverable Underwater Vehicle
 The Development of a Highly Maneuverable Underwater Vehicle David K. Novick, Robert Pitzer, Bryan Wilkers, Dr. Carl D. Crane III 1 Erik de la Iglesia, Dr. Keith L. Doty 2 Published: Robotics 98: The 3rd
The Development of a Highly Maneuverable Underwater Vehicle David K. Novick, Robert Pitzer, Bryan Wilkers, Dr. Carl D. Crane III 1 Erik de la Iglesia, Dr. Keith L. Doty 2 Published: Robotics 98: The 3rd
Aasta Hansteen. Operational Experiences. FFU Seminar 28 th January Tom-Erik Henriksen
 Aasta Hansteen Operational Experiences FFU Seminar 28 th January 2016 Tom-Erik Henriksen Agenda Introduction to Aasta Hansteen Main Challenges & Risks Operational Experiences - 2015 Campaigns 2 seabed-to-surface
Aasta Hansteen Operational Experiences FFU Seminar 28 th January 2016 Tom-Erik Henriksen Agenda Introduction to Aasta Hansteen Main Challenges & Risks Operational Experiences - 2015 Campaigns 2 seabed-to-surface
Subsea Tooling Services Range of Dredgers
 Subsea Tooling Services Range of Dredgers (STS) has a large selection of ROV / Diver operated dredgers. The range includes 3 4 6 8 10 and 12 dredgers. We are confident we have a dredger that will suit
Subsea Tooling Services Range of Dredgers (STS) has a large selection of ROV / Diver operated dredgers. The range includes 3 4 6 8 10 and 12 dredgers. We are confident we have a dredger that will suit