An Integrated Marine Gradiometer Array System (MGA)
|
|
|
- Dominic Cross
- 5 years ago
- Views:
Transcription
 For Detection and Location of")

1 An Integrated Marine Gradiometer Array System (MGA) For Detection and Location of Chemical and Conventional UXO/MEC in Shallow to Deep Marine and Freshwater Environments






2 Introduction Tetra Tech EC, Inc. has over 20 years of experience in the MEC/UXO business Over 100 MEC/UXO projects including terrestrial MEC/UXO assessment and clearance, marine chemical munitions removal and MEC/UXO disposal and demilitarization Technical experts with 30+ years of individual experience Over $3 million dollars in MEC/UXO and geophysical equipment Work in challenging environments including arctic and desert regions, as well as underwater 2




3 Marine Capabilities 9 Geophysicists on staff with more than 50 years of combined experience in land based, airborne and marine geophysics 4 Oceanographers and hydrographers on staff with more than 40 years combined experience in marine survey methods and software. Personnel with past experience working with sonar manufacturer (RESON) conducting development and systems integration EOD trained divers Over $1 million dollars in marine geophysical and navigation equipment 3






4 Marine MEC/UXO Recovery Experience An Example Project in Washington Conducted 912 Dives in ft water depth for conventional MEC/UXO Hours of Bottom Time Recovered 3,577 Ordnance Items Without Incident Marine Chemical MEC/UXO Recovery & packaging of almost 400 chemical munitions for disposal 20 to 50 foot water depths Developing the ability for unmanned MEC/UXO recovery in deeper water 4
 Performance verification with ROVs and/or EOD trained divers Data fusion with commercial and Tetra Tech developed software")
5 Technology Description Multifaceted approach High-resolution bathymetry and/or imagery sonar Subbottom profiling Mapping with Tetra Tech s advanced Marine Gradiometer Array System (MGA) Performance verification with ROVs and/or EOD trained divers Data fusion with commercial and Tetra Tech developed software 5

6 Technology Benefits Simultaneous collection of multiple data streams Modular design of MGA for scalable architecture and adaptive configuration Low risk proven technologies with commercial hardware and software support Improved accuracy for reduced remedial / monitoring cost Tetra Tech funded Field Testing System has been tested repeatedly over 4 year period 6

7 Base Platform Design Commercially available gradiometers measure magnetic gradients 3-D. All measurements synchronized Rigidly mounted sensors no relative motion Highly stable platform no rotational motion Very sensitive sensors detects minute gradients accurately Magnetically clean no platform-effect on data results Thorough support sensors heading, pressure, altitude, pitch, roll Single unit (SeaQuest) tested & proven on a variety of applications 7


8 3D Underwater Gradiometer Array Design Coupled SeaQuests (cross bracing, & tow bridal) Modifications include addition of a magneto-resistive heading sensor and a longitudinal sensors to provide true 3-D analytic signal in real-time. Instrumentation: 7 to 10 Overhauser magnetometers. Two built in altimeters Two pressure sensors Two pitch and roll sensors One magneto-resistive heading sensor. The array records the total field data from each of the 7 to 10 sensors plus the 6 to 9 separate gradient components and two or three 3-D Analytic Signals The towed array covers a m wide swath that allows for efficiently surveying the seafloor with near 100% coverage 8


9 3D Gradiometer Array with Longitudinal Sensors 7 Magnetometer Sensors 9

 Original 10")
10 3D Gradiometer Array Scaleable and Versatile Reconfigured to allow lower flight height or for surface and shallow towing Other modifications include addition of removable wheels to allow for bottom towing ( towed crawler ) Original 10 Magnetometer Design 10
 and")


11 Technical Approach Conduct high-resolution multibeam sonar survey with sidescan (or interferometric sidescan) and chirp subbottom profiling concurrently Utilize sidescan and subbottom profile data to refine MGA survey approach to maximize efficiency and reduce cost Optimize survey patterns Avoid obstructions and debris which are proud of surface 11


12 Technical Approach Conduct magnetometer survey using MGA and appropriate positioning systems for anticipated water depths Process data and identify MEC/UXO-like anomalies and related features, as well as debris field (if present) Conduct Anomaly Evaluation Using High Resolution Video and Imagery Sonar on ROVs and/or visual inspection by Divers 12



13 High-Resolution Multi-beam and Interferometric Sidescan Sonar Survey Map site bathymetry and identify areas of interest Identify debris fields and become aware of obstructions to maintaining magnetometer array flight height Acquire multibeam snippet data to assist with classification of bottom type and items of interest Refine MGA survey approach based on analysis of data 13



14 Example RESON SeaBat Multibeam Data Breakwater and associated rip rap/debris Mooring Line with Associated Scour Hole Mega Ripples in River Channel 14






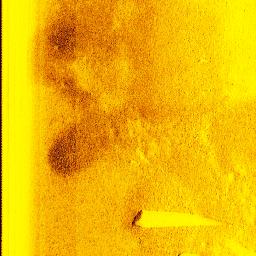
15 Sidescan Sonar Survey Including Interferometric Further define debris fields and obstructions to maintaining magnetometer array flight height Complement classification of bottom type and items of interest Drape over multibeam surface 15


 Refine MGA survey approach based on analysis")
16 Subbottom Profiling Identify, quantify, and delineate areas with sediment that could contain buried MEC/UXO and to approximately what depth MEC/UXO may be found Identify scour and deposition patterns that may assist in evaluation of MEC/UXO transport (sediment facies analysis) Refine MGA survey approach based on analysis of data 16



17 Data Fusion - Examples of Subbottom Profile Data Co-registered with Multibeam Data Sub-bottom Profile Seen from Below River Bottom Multibeam Bathymetry Sub-bottom Profile with Water Column Removed, Seen from Above River Bottom Through Wireframe of Bathymetry Surface 17






18 MGA Survey Identify ferrous anomalies that may be MEC/UXO or MEC/UXO-related (individual items or clusters) Identify other anomalies of interest (sunken ships or barges, pipelines, etc. Commercially proven 3-D gradiometer re-engineered for optimum MEC/UXO detection Used commercially to depths of >1000m for pipeline, cable route mapping, and deep sea mining In use by US Navy for mapping and other applications* *Naval Sea Systems Command, Undersea Warfare Center, Mapping Marine Ferrous Targets Using the SeaQuest Gradiometer System,



19 Example Total Field Results from MGA Both total field and analytic signal are acquired while surveying with a 3-D gradiometer, therefore data from both are used during data interpretation. Geologically -sourced anomalies (topographically complex bumpy bedrock, boulders, etc.) can mask smaller ferrous targets 19

 Suppresses geological")

20 Example Analytic Signal Results from MGA True 3-D Analytic Sign Eliminates solar interference (i.e. diurnal variations) Suppresses geological interference Results independent of survey line direction Analytic Signal yields a clear peak for each target even when the objects are close together. This simplifies data interpretation. 20




")

21 MGA Detection Capability 3-D Analytic Signal Total Field Data Single 40 mm projectile with case (full round) 3 nt analytic signal peak & 3 nt total field peak (pos) Reported burial depth inches MGA flight altitude 1.6 to 2 meters 21


22 Summary The Tetra Tech data collection and analysis system was developed by integrating and modifying commercially available equipment, developing a customized system for MEC/UXO detection and mapping The system is scalable/modular & reconfigurable to facilitate adaptation to a broad variety of site conditions and data needs The system collects data over a much broader area than other available systems and in a broader range of water depths, increasing production and reducing cost The system is field proven to be reliable and effective The system provides detailed, high-quality data that will support the most accurate discrimination and location of subsurface ferrous anomalies, foot print reduction, and effective planning 22


23 Any Questions? It s nice when it all comes together 23
24 Additional Information 24



.")


25 Software Oasis Montaj Filtering, gridding, target picking 3-D Voxel gridding Hypack/HySweep Survey Vessel Navigation Single/multibeam sonar acquisition and editing Fledermaus Multibeam sonar data processing/editing. 3D presentations of multibeam, sidescan, subbottom profiler and magnetometer data Simulations with flights (including movies). Real-time Tow fish tracking in 3D. SonarWiz.Map Sidescan/Subbottom Sonar Playback & Processing Site/route mosaics Identification of debris fields Custom Sonar Software Experienced sonar software developer GIS ArcInfo, Arc Map, ERDAS Imagine, AutoCAD Charts produced and presented electronically and/or as hardcopy 25




26 Positioning Components The Vessel RTK GPS (~2 cm on x, y and z) or DGPS offshore (~20 cm) Vessel IMU (heave, pitch, roll, yaw) Data Acquisition Computers The Towfish USBL / LBL Digital Cable Counter Altimeter, pitch, roll and depth sensors Heading sensor 26


 Data used to model and")
27 Multibeam Sonar Components RESON SeaBat 8125 multi-beam echo sounder (MBE) Provides detailed bathymetry data Highest resolution commercial multi-beam sonar currently available Integrated inertial system (Applanix POS-MV / WaveMaster) Determines heading and vessel roll, heave and pitch to allow compensation of bathymetry data for vessel motion induced by wave action & other vessel dynamics. Seabird SBE-19 / MicroCat Sound Velocity Meter (MBE support system) Data used to model and correct refraction and path length effects from sound speed changes through the water column 27



28 Sidescan Options EdgeTech 4200, 4300, Klein 5000, or equivalent Sidescan data to compliment and improve the resolution of multibeam sonar data (drape mosaic on multibeam surface) Provides photo-like imagery which is used to identify areas of interest Benthos C-3D Interferometric Sidescan System (optional) May be used to supplement the MBE in any areas that are too shallow to be safely or efficiently surveyed (~>1-2 meters) 28
29 3D Gradiometer Array with Longitudinal Sensors 7 Magnetometer MGA System 29
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping
 Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
Malta Survey activities
 Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
Malta Survey activities Malta 19 September 2016 L. Facchin OGS National Institute of Oceanography and Experimental Geophysics Offshore Multibeam (MBES) Sub bottom profiling (SBP: Chirp or Boomer) Multichannel
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Multibeam and Laser: Combined High Resolution. Hydrographic Surveying for Civil Engineering Project Support
 Multibeam and Laser: Combined High Resolution Hydrographic Surveying for Civil Engineering Project Support John Dillon-Leetch,Port of London Authority Duncan Mallace, NetSurvey, UK Overview Introduction
Multibeam and Laser: Combined High Resolution Hydrographic Surveying for Civil Engineering Project Support John Dillon-Leetch,Port of London Authority Duncan Mallace, NetSurvey, UK Overview Introduction
Certified Professionals in Hydrographic Solutions
 Certified Professionals in Hydrographic Solutions Client Satisfaction is our Deliverable Port of Brisbane Pty Ltd Port Surveys Certified Professionals in Hydrographic Surveying Tel +61 (0) 7 3258 4820
Certified Professionals in Hydrographic Solutions Client Satisfaction is our Deliverable Port of Brisbane Pty Ltd Port Surveys Certified Professionals in Hydrographic Surveying Tel +61 (0) 7 3258 4820
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
Hydrographic Surveying at The Port of London
 Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Hydrographic Surveying at The Port of London John Dillon-Leetch Port and Terminal Technology 2009 14 th October, Antwerp Overview Introduction Surveying the Thames Navigational Charting High Resolution
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico.
 Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
2012 INDUSTRY DAY Society of American Military Engineers - Omaha Post
 2012 INDUSTRY DAY Society of American Military Engineers - Omaha Post Omaha District Corps of Engineers Military Munitions Design Center (MMDC) Glenn Marks MMDC Manager May 8, 2012 US Army Corps of Engineers
2012 INDUSTRY DAY Society of American Military Engineers - Omaha Post Omaha District Corps of Engineers Military Munitions Design Center (MMDC) Glenn Marks MMDC Manager May 8, 2012 US Army Corps of Engineers
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements
 Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar
 Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar Lisa Nicole Brisson, Lead Bathymetry Product Engineer, EdgeTech, Boca Raton, FL Damon Wolfe, Lead Bathymetry Sales Engineer, EdgeTech,
Performance Analysis of the EdgeTech 6205 Swath Bathymetric Sonar Lisa Nicole Brisson, Lead Bathymetry Product Engineer, EdgeTech, Boca Raton, FL Damon Wolfe, Lead Bathymetry Sales Engineer, EdgeTech,
Background Paper: Surveys. Nord Stream 2 AG Sep-17
 Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
An accident at sea, such as an
 Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
NEED FOR SUPPLEMENTAL BATHYMETRIC SURVEY DATA COLLECTION
 305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft
 Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
Appendix B FGDC Hydrographic Accuracy Standard Geospatial Positioning Accuracy Standards Part 5: Standards for Nautical Charting Hydrographic Surveys - Public Review Draft Subcommittee on Marine and Coastal
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
Survey solutions. catalogue DEEP INSIGHT. SHARPER SENSES.
 Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
Survey solutions catalogue DEEP INSIGHT. SHARPER SENSES. i stands for Imagination. «X» is the excellence for which we strive. Our technologies guarantee superiority in all senses - navigating from the
CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE
 PRESENTATION HYDRO 17 15/11/2017 CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE Jana De Cuyper - MSc Geology Conor Davidge - BSc Ocean Exploration
PRESENTATION HYDRO 17 15/11/2017 CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE Jana De Cuyper - MSc Geology Conor Davidge - BSc Ocean Exploration
UXO Below: Mitigating Marine UXO Risk
 RPS Energy Ltd Explosives Engineering Services UXO Below: Mitigating Marine UXO Risk Presented by Victoria Phillips 1 Aim To deliver an overview of Unexploded Ordnance (UXO) in the marine environment,
RPS Energy Ltd Explosives Engineering Services UXO Below: Mitigating Marine UXO Risk Presented by Victoria Phillips 1 Aim To deliver an overview of Unexploded Ordnance (UXO) in the marine environment,
from ocean to cloud PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM
 PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS
 INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
MISSION PLANNING AND DATA ACQUISITION SOFTWARE
 MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
Click to edit Master title style Advanced Military Layers. and the Historic Environment
 Advanced Military Layers and the Historic Environment Paul Baggaley and Louise Tizzard Wessex Archaeology 1 Click to edit Objectives Master title style to establish the degree of mutual benefit in integrating
Advanced Military Layers and the Historic Environment Paul Baggaley and Louise Tizzard Wessex Archaeology 1 Click to edit Objectives Master title style to establish the degree of mutual benefit in integrating
Sonar Bathymetry: Waquoit Bay NERR
 Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
Sonar Bathymetry: Waquoit Bay NERR Determining the Functional Shallow Water Limitation for an Arrival Based Sonar Frederick A. Hegg Teledyne Benthos, Inc. 49 Edgerton Drive North Falmouth, MA 02556 fhegg@teledyne.com
3.6 Magnetic surveys. Sampling Time variations Gradiometers Processing. Sampling
 3.6 Magnetic surveys Sampling Time variations Gradiometers Processing Sampling Magnetic surveys can be taken along profiles or, more often, on a grid. The data for a grid is usually taken with fairly frequent
3.6 Magnetic surveys Sampling Time variations Gradiometers Processing Sampling Magnetic surveys can be taken along profiles or, more often, on a grid. The data for a grid is usually taken with fairly frequent
INSIDE 16. Hydrographic Soundings, Sensors, and Bots. Dual-head Sonar Mapping. 25 A Case for Big Blue Data. Collaboration in the Air & on the Ground
 POSITIONING AND MEASUREMENT, ELEVATED AUGUST 2016 INSIDE: SURVEYING HYDROGRAPHY EDUCATION MAPPING UAS MACHINE CONTROL Hydrographic Soundings, Sensors, and Bots INSIDE 16 25 A Case for Big Blue Data 31
POSITIONING AND MEASUREMENT, ELEVATED AUGUST 2016 INSIDE: SURVEYING HYDROGRAPHY EDUCATION MAPPING UAS MACHINE CONTROL Hydrographic Soundings, Sensors, and Bots INSIDE 16 25 A Case for Big Blue Data 31
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004
 Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS)
") Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Specifications for Synchronized Sensor Pipe Condition Assessment (AS PROVIDED BY REDZONE ROBOTICS) A. Scope of Work The work covered by these specifications consists of furnishing all materials, labor,
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
DUALEM EM EQUIPMENT. Geostudi Astier srl Via Nicolodi, Livorno Italy
 DUALEM EM EQUIPMENT DUALEM instruments (e.g. the DUALEM-1) incorporate a DUALEM sensor as well as an internal WAAS-enabled GPS receiver, a hand-held weatherproof display/keypad/power-supply, a carrying
DUALEM EM EQUIPMENT DUALEM instruments (e.g. the DUALEM-1) incorporate a DUALEM sensor as well as an internal WAAS-enabled GPS receiver, a hand-held weatherproof display/keypad/power-supply, a carrying
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY
 THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
Failure of Wide Bay Pipeline in the Burnett River
 APGA Paper Date: 29 August 2015 Subject: Risk Mitigation for Trench Pipeline Under Shallow River Crossings Prepared by: Derek Boo Manager Planning and Engineering Company: APA Group Background: Beginning
APGA Paper Date: 29 August 2015 Subject: Risk Mitigation for Trench Pipeline Under Shallow River Crossings Prepared by: Derek Boo Manager Planning and Engineering Company: APA Group Background: Beginning
Recommended operating guidelines (ROG) for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:
 for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:") Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006)
") ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
ICES Guidelines for Multibeam Echosounder Data (Compiled September 2006) If you are considering producing a hydrographic survey please read the following information first. Your survey could be used to
 Side 1 av 7 Home > Diving Equipment > Side Scan Sonar > Imagenex Sidescan Sonar > Yellowfin Yellowfin Sidescan Sonar Magnetometers Side Scan Sonar Cameras Storm Cases Interferometric & Sidescan Equipment
Side 1 av 7 Home > Diving Equipment > Side Scan Sonar > Imagenex Sidescan Sonar > Yellowfin Yellowfin Sidescan Sonar Magnetometers Side Scan Sonar Cameras Storm Cases Interferometric & Sidescan Equipment
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Investigating Acoustic Anomalies in the Water Column. Alistair Robertshaw, Geohazards Specialist, BP Oceanology 2016
 Investigating Acoustic Anomalies in the Water Column Alistair Robertshaw, Geohazards Specialist, BP Oceanology 2016 Overview Water Column Data First Impressions Basic Theory Reflection Geometries Examples
Investigating Acoustic Anomalies in the Water Column Alistair Robertshaw, Geohazards Specialist, BP Oceanology 2016 Overview Water Column Data First Impressions Basic Theory Reflection Geometries Examples
INTERNATIONAL HYDROGRAPHIC REVIEW MAY 2015
 OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling
 Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
STOPPING THE UNDERWATER DIVER THREAT
 STOPPING THE UNDERWATER DIVER THREAT Dr. Robert F. De La Croix and Mr. Juergen G. Keil A non-lethal, scalable deterrent solution Updated from original article published in Maritime Technology Reporter,
STOPPING THE UNDERWATER DIVER THREAT Dr. Robert F. De La Croix and Mr. Juergen G. Keil A non-lethal, scalable deterrent solution Updated from original article published in Maritime Technology Reporter,
Regional Hydrographic Research, Studies & Projects
 Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys
 Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys Lisa N. Brisson 1, Damon A. Wolfe 1, Matthew Staley P.S.M. 2 1 EdgeTech 4 Little Brook Rd West Wareham, MA 02576 2 USACE
Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys Lisa N. Brisson 1, Damon A. Wolfe 1, Matthew Staley P.S.M. 2 1 EdgeTech 4 Little Brook Rd West Wareham, MA 02576 2 USACE
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Cruise Report. Field Oceanography. Team 5, Leg 3
 Cruise Report Field Oceanography Team 5, Leg 3 Submitted by: Lina Stolze Allison Kennedy Madlena Hukobyan Peter Hülse Date: October 27, 2008 1. Objectives The fieldwork was part of a field oceanography
Cruise Report Field Oceanography Team 5, Leg 3 Submitted by: Lina Stolze Allison Kennedy Madlena Hukobyan Peter Hülse Date: October 27, 2008 1. Objectives The fieldwork was part of a field oceanography
H ydrog ra p h ic S urve y Using SEABAT
 H ydrog ra p h ic S urve y Using SEABAT Hirokazu Mori, Tadashi Yamamoto and Isao Tedokon, Hydrographic Department, Japan Coast Guard The original was written in 1999, and our hydrographic surveys using
H ydrog ra p h ic S urve y Using SEABAT Hirokazu Mori, Tadashi Yamamoto and Isao Tedokon, Hydrographic Department, Japan Coast Guard The original was written in 1999, and our hydrographic surveys using
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
TRACK RECORD Navigation, positioning and survey services
 2011-2013 Navigation, positioning and survey services August 2013 Nam Chau Building 180-182 Nguyen Van Troi Str., Ward 4 Vung Tau, Vietnam DATE CUSTOMER SERVICES PERSONNEL AND EQUIPMENT 2013 August PTSG
2011-2013 Navigation, positioning and survey services August 2013 Nam Chau Building 180-182 Nguyen Van Troi Str., Ward 4 Vung Tau, Vietnam DATE CUSTOMER SERVICES PERSONNEL AND EQUIPMENT 2013 August PTSG
API Study on Detection and Recovery of Sunken Oil. API Study Objectives
 API Study on Detection and Recovery of Sunken Oil Jacqueline Michel, Research Planning, Inc. Mark Ploen, QualiTech Jim Elliott, T&T Marine Salvage, Inc. William Key API Study Objectives 1. ID current best
API Study on Detection and Recovery of Sunken Oil Jacqueline Michel, Research Planning, Inc. Mark Ploen, QualiTech Jim Elliott, T&T Marine Salvage, Inc. William Key API Study Objectives 1. ID current best
Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement
 SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey
 The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
MARINE NAVIGATION LESSON PLAN See That Sound?
 Marine Navigation Hydrography Lesson Plan MARINE NAVIGATION LESSON PLAN See That Sound? Theme Hydrographic Survey Links to Overview Essays and Resources Needed for Student Research http://oceanservice.noaa.gov/topics/navops/hydrosurvey/
Marine Navigation Hydrography Lesson Plan MARINE NAVIGATION LESSON PLAN See That Sound? Theme Hydrographic Survey Links to Overview Essays and Resources Needed for Student Research http://oceanservice.noaa.gov/topics/navops/hydrosurvey/
South Bay Coastal Ocean Observing System California Clean Beaches Initiative
 South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report September 2003 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of
South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report September 2003 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of
Fuzing Innovations for Air Burst Munitions: A 25mm Case Study
 Fuzing Innovations for Air Burst Munitions: A 25mm Case Study Mark Tomes Program Manager 49 th Annual Fuze Conference April 2005 Presentation Outline This briefing will discuss the details of: ATK s IR&D
Fuzing Innovations for Air Burst Munitions: A 25mm Case Study Mark Tomes Program Manager 49 th Annual Fuze Conference April 2005 Presentation Outline This briefing will discuss the details of: ATK s IR&D
Data Collection and Processing: Elwha Estuary Survey, February 2013
 Data Collection and Processing: Elwha Estuary Survey, February 2013 Ian Miller, WA Sea Grant Olympic Peninsula Field Office, 1502 E. Lauridsen Blvd #82, Port Angeles, WA 98362 immiller@u.washington.edu
Data Collection and Processing: Elwha Estuary Survey, February 2013 Ian Miller, WA Sea Grant Olympic Peninsula Field Office, 1502 E. Lauridsen Blvd #82, Port Angeles, WA 98362 immiller@u.washington.edu
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Release Performance Notes TN WBMS _R _Release_Presentation.pptx 22 September, 2014
 TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
TN-140079-1.2 WBMS _R2014-06_Release_Presentation.pptx 22 September, 2014 Since the 2013-12 release, NORBIT has made tremendous improvements to both the functionality and performance of the WBMS systems.
CODEVINTEC. All the sonars you need, in one place
 45 27 39.384 N 9 07 30.145 E All the sonars you need, in one place Teledyne RESON, BlueView and Odom Hydrographic are part of the Teledyne Marine Acoustic Imaging Group (TMAIG). With more than 35 years
45 27 39.384 N 9 07 30.145 E All the sonars you need, in one place Teledyne RESON, BlueView and Odom Hydrographic are part of the Teledyne Marine Acoustic Imaging Group (TMAIG). With more than 35 years
DIFFERENT SOLUTIONS TO INSPECT PLATFORM RISERS. By R van Agthoven and H Quakkelsteijn, ApplusRTD, Rotterdam, The Netherlands
 DIFFERENT SOLUTIONS TO INSPECT PLATFORM RISERS By R van Agthoven and H Quakkelsteijn, ApplusRTD, Rotterdam, The Netherlands SUMMARY The need for the inspection of pipelines and risers is growing, as the
DIFFERENT SOLUTIONS TO INSPECT PLATFORM RISERS By R van Agthoven and H Quakkelsteijn, ApplusRTD, Rotterdam, The Netherlands SUMMARY The need for the inspection of pipelines and risers is growing, as the
Challenges in determining water surface in airborne LiDAR topobathymetry. Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014
 Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
SeaBat T50-R Product Description
 Ultra-High Resolution Multibeam Echosounder March 2017 PD17419-3 Table of Contents SYSTEM OVERVIEW... 5 Introduction... 5 Typical Applications... 5 Warranty... 5 SYSTEM ARCHITECTURE... 6 SeaBat T50-R...
Ultra-High Resolution Multibeam Echosounder March 2017 PD17419-3 Table of Contents SYSTEM OVERVIEW... 5 Introduction... 5 Typical Applications... 5 Warranty... 5 SYSTEM ARCHITECTURE... 6 SeaBat T50-R...
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE.
 EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Argentine Navy ARA San Juan (S-42) Search 2018
 Search 2018") Daily Status Report: OI Seabed Constructor 22.09.18 Key Developments; Next 24hrs; 11:32hrs LT Perform cargo transfer (2x Edge Tech Bottles etc) with ARA Admiral Brown. Acoustically maintained AUV Fleet(5)
Daily Status Report: OI Seabed Constructor 22.09.18 Key Developments; Next 24hrs; 11:32hrs LT Perform cargo transfer (2x Edge Tech Bottles etc) with ARA Admiral Brown. Acoustically maintained AUV Fleet(5)
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL
 ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
Body Search and Recovery Using Sonar
 Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
High- resolution near- shore geophysical survey using an Autonomous Underwater Vehicle (AUV) with integrated magnetometer and side- scan sonar
 with integrated magnetometer and side- scan sonar") High- resolution near- shore geophysical survey using an Autonomous Underwater Vehicle (AUV) with integrated magnetometer and side- scan sonar By Doug Hrvoic, B.A.Sc A Thesis Submitted to the School of
High- resolution near- shore geophysical survey using an Autonomous Underwater Vehicle (AUV) with integrated magnetometer and side- scan sonar By Doug Hrvoic, B.A.Sc A Thesis Submitted to the School of
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
Barge MM 46 Response Natchez, MS Lower Mississippi River Mile Marker 363
 UNCLASSIFIED Barge MM 46 Response Natchez, MS Lower Mississippi River Mile Marker 363 UNCLASSIFIED RRT Activation: Type of Product & Amount spilled: Cause of Spill: None Catalytic Cracked Clarified Oil
UNCLASSIFIED Barge MM 46 Response Natchez, MS Lower Mississippi River Mile Marker 363 UNCLASSIFIED RRT Activation: Type of Product & Amount spilled: Cause of Spill: None Catalytic Cracked Clarified Oil
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office
 S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
S-44 edition 5 The IHO s New Standard For Hydrographic Surveys Chris Howlett Head of Seabed Data Centre United Kingdom Hydrographic Office Chairman of IHO Working Group that created S-44 edition 5 S-44
The Challenge of Underwater Gas (Leakage) Monitoring
 Monitoring") The Challenge of Underwater Gas (Leakage) Monitoring Ingo Möller Kai Spickenbom, Volker Böder, Martin Krüger IEAGHG workshop on Natural Releases of CO2, Maria Laach, November 2 4, 2010 Challenges of underwater
The Challenge of Underwater Gas (Leakage) Monitoring Ingo Möller Kai Spickenbom, Volker Böder, Martin Krüger IEAGHG workshop on Natural Releases of CO2, Maria Laach, November 2 4, 2010 Challenges of underwater
Course Instructions. 3 Easy Steps to Complete the Course: 1.) Read the Course PDF Below.
 Read the Course PDF Below.") Course Instructions NOTE: The following pages contain a preview of the final exam. This final exam is identical to the final exam that you will take online after you purchase the course. After you purchase
Course Instructions NOTE: The following pages contain a preview of the final exam. This final exam is identical to the final exam that you will take online after you purchase the course. After you purchase
Remotely Operated Vehicles for Restricted Access Hydrographic Surveys
 Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Products & Services Remotely Operated Vehicles for Restricted Access Hydrographic Surveys Mathew Cook The technological advancements in the field of ROV have greatly simplified the inspection process in
Survey Technique for Underwater Digital Photography with Integrated GPS Location Data
 Survey Technique for Underwater Digital Photography with Integrated GPS Location Data Tim Siwiec: United States Environmental Protection Agency Abstract This survey technique is an inexpensive method of
Survey Technique for Underwater Digital Photography with Integrated GPS Location Data Tim Siwiec: United States Environmental Protection Agency Abstract This survey technique is an inexpensive method of
STUDY REPORT W&AR-03 RESERVOIR TEMPERATURE MODEL ATTACHMENT B DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT
 STUDY REPORT W&AR-03 RESERVOIR TEMPERATURE MODEL ATTACHMENT B DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT Prepared for: TURLOCK IRRIGATION DISTRICT MODESTO
STUDY REPORT W&AR-03 RESERVOIR TEMPERATURE MODEL ATTACHMENT B DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT DON PEDRO RESERVOIR BATHYMETRIC STUDY REPORT Prepared for: TURLOCK IRRIGATION DISTRICT MODESTO
MOTUS Wave Buoys. Powered By the Aanderaa MOTUS Directional Wave Sensor
 MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
Development of Technology to Estimate the Flow Field around Ship Hull Considering Wave Making and Propeller Rotating Effects
 Development of Technology to Estimate the Flow Field around Ship Hull Considering Wave Making and Propeller Rotating Effects 53 MAKOTO KAWABUCHI *1 MASAYA KUBOTA *1 SATORU ISHIKAWA *2 As can be seen from
Development of Technology to Estimate the Flow Field around Ship Hull Considering Wave Making and Propeller Rotating Effects 53 MAKOTO KAWABUCHI *1 MASAYA KUBOTA *1 SATORU ISHIKAWA *2 As can be seen from
Offshore Wind Energy Stringent quality assurance and quality control. Coastal and Freshwater Fast responding and flexible organisation
 Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
APPENDIX C DIVING. Section I. General
 APPENDIX C DIVING Section I. General PURPOSE a. Engineer divers support all diving missions in the theater of operations. Engineer support in the communication zone is provided on an area basis; and in
APPENDIX C DIVING Section I. General PURPOSE a. Engineer divers support all diving missions in the theater of operations. Engineer support in the communication zone is provided on an area basis; and in
WELL SCAVENGER. Versatile wellbore clean-up tool for the most demanding operations
 WELL SCAVENGER Versatile wellbore clean-up tool for the most demanding operations WELL SCAVENGER: A versatile wellbore cleanup tool for flowrestricted applications The inability to recover wellbore debris
WELL SCAVENGER Versatile wellbore clean-up tool for the most demanding operations WELL SCAVENGER: A versatile wellbore cleanup tool for flowrestricted applications The inability to recover wellbore debris
LiDAR My favourite tool in the bag 2011 St Kitts & Nevis
 LiDAR My favourite tool in the bag 2011 St Kitts & Nevis Lt Cdr Rupert Forester-Bennett RN (ret d) December 5 th to 11 th 2011 Content Collection of geospatial data reasons Overcoming the White Ribbon
LiDAR My favourite tool in the bag 2011 St Kitts & Nevis Lt Cdr Rupert Forester-Bennett RN (ret d) December 5 th to 11 th 2011 Content Collection of geospatial data reasons Overcoming the White Ribbon
AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL
 AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL Jay Wise 1 ABSTRACT Phillips and Jordan, a leading excavating and disaster recovery contractor, was faced with the challenge to manage a civil contract involving
AUTOMATIC DREDGING PROFILE AND CONTOUR CONTROL Jay Wise 1 ABSTRACT Phillips and Jordan, a leading excavating and disaster recovery contractor, was faced with the challenge to manage a civil contract involving
Processing Lidar Data for Charting Applications Understanding the Trade-Offs and Challenges
 Processing Lidar Data for Charting Applications Understanding the Trade-Offs and Challenges A variety of acoustic and optical technologies are able to be used to survey shallow water areas. Due to the
Processing Lidar Data for Charting Applications Understanding the Trade-Offs and Challenges A variety of acoustic and optical technologies are able to be used to survey shallow water areas. Due to the
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES
 ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC