Supplementary Information
|
|
|
- Paulina Baker
- 5 years ago
- Views:
Transcription

1 Supplementary Information Novel robotic interface to evaluate, enable, and train locomotion and balance after neuromotor disorders Nadia Dominici, Urs Keller, Heike Vallery, Lucia Friedli, Rubia van den Brand, Michelle L. Starkey, Pavel Musienko, Robert Riener and Grégoire Courtine Supplementary Figure 1:Technical description of the robotic interface and control schemes
2 Supplementary Figure 1: Technical description of the robotic interface and control schemes USER INTERFACE A user-friendly GUI (Graphical user interface) is implemented in MATLAB/Simulink (The MathWorks, CA). The interface allows the user to create a virtual environment in which the applied forces or the end-effector position can be adjusted for each single actuated DoF of the robot. For example, the user can independently set any of the 4 actuated axes to behave transparently. Concomitantly, the other axes can provide a constant force that is proportional to the rat s body weight, as for supporting the rat against gravity. The axes can also be configured to be stiff in order to prevent lateral fall or to guide the rat along a user-defined trajectory. Alternatively, the user can control the displacement of the end-effector (position control), as for pushing the rat in a given direction, or along a user-defined trajectory. Finally, the user can introduce sudden changes in the virtual environment. For example, a user-defined perturbation can be superimposed onto any control scheme based on external triggers or the position of the rat in the real world. The different control strategies for the various locomotor paradigms can be found in Supplementary Figure 2. VERSATILE IMPEDANCE CONTROL IMPLEMENTATION We implemented an impedance control scheme that can adjust the force exerted by each actuated DoF of the robotic interface independently in real-time (1kHz). The controller is cascaded: an outer loop processes the position of the rat with respect to the virtual environment; for example a world with guiding walls or gravity-reduced conditions. This algorithm translates the virtual environment defined by the user into a vector F des of desired forces. A force controller adjusts the desired motor speeds qq mot,des sent to the drives based upon the error between the desired forces and the forces measured through spring deflection. An inner speed controller ensures that the actual motor speed qq mot tracks the desired motor speed by commanding appropriate actuator torques τ mot. The outer loops run on a Matlab xpc real-time operating system. The speed control runs on the actuator drives. ROBOT Cartesian positioning system: The robot consists of an actuated Cartesian positioning system that allows translations of the rat in the horizontal plane (x,y) while providing vertical support (z). An additional motor at the end-effector of this serial structure actuates rotation (φ). This serial configuration provides a large workspace in which forces can be applied to the animal in 4 DoFs. Force module: To hide the inertia of the massive positioning robot and to measure the extremely small interaction forces between the robot and the rat, we developed a novel force module based on a "Series Elastic Actuator" (SEA). A SEA is composed of an actuator that is complemented with a passive compliant element in series. This compliance improves force control performance and effectively decouples actuator inertia to achieve a transparent interface. In the force module, we extended this SEA concept to 4 DoFs by providing multidimensional compliance at the end-effector of the positioning system. Kinematic constraints for unactuated DoF: A mechanical Delta linkage prevents the rat from tilting in the 2 unactuated DoF, leading to constraining forces F c. The Delta structure also provides the means of measuring the end-effector position (rat position q rat) and subsequently the interaction forces F el between the robot and the rat. Elastic decoupling of actuated DoF: The compliance for the residual DoFs is achieved by multiple linear springs attached to the suspended platform and by an additional spring pair attached to the rotating shaft within the platform. REAL WORLD The rat is positioned in a custom-made, skin-like jacket made of light fabrics. A Velcro strip allows attachment of the rat onto a back plate with a rigid bar coming from the robot end-effector. The rat s position and the interaction forces with the robot are fed back to the impedance controller.

3 Supplementary Figure 2: Technical description of the locomotor testing paradigms Locomotor capacities of intact and motor impaired rats were evaluated in a total of 7 tasks. a. Quadrupedal locomotion along a straight horizontal runway. b. Quadrupedal locomotion along a 90deg-curved horizontal runway. c. Quadrupedal locomotion along a straight horizontal ladder with irregularly spaced rungs. d. Bipedal locomotion along a straight horizontal runway. In this task, the robot propelled the rat forward at a constant velocity. e. Lateral perturbation (1s, 2.5N) introduced during continuous quadrupedal locomotion along a straight horizontal runway (task a). f. Continuous bipedal locomotion on a motorized treadmill belt. g. Quadrupedal locomotion along regularly spaced steps on a staircase. The various runways, stairs and ladders were made of wood but the walking surface was covered with turf to ensure a solid paw contact. The light grey box indicates the position of the force plate that measured ground reaction forces and ground reaction torques in X, Y, Z directions. h. For each task, the degree of compliance was adjusted for each translational and rotational axis independently. Control strategies included: stiff control (black), zero-force control (light grey, constant-force set to 0%), adjustable constant-force (red, constant-force set to a percentage of body weight), and constant-velocity (green, position control). The behavior of each axis in each task is reported in the upper corner of each panel. i. Features and dimensions of the various jackets. The Velcro pads are represented in dark. The position and size of the back attachment is shown in blue. All the dimensions are reported in mm.

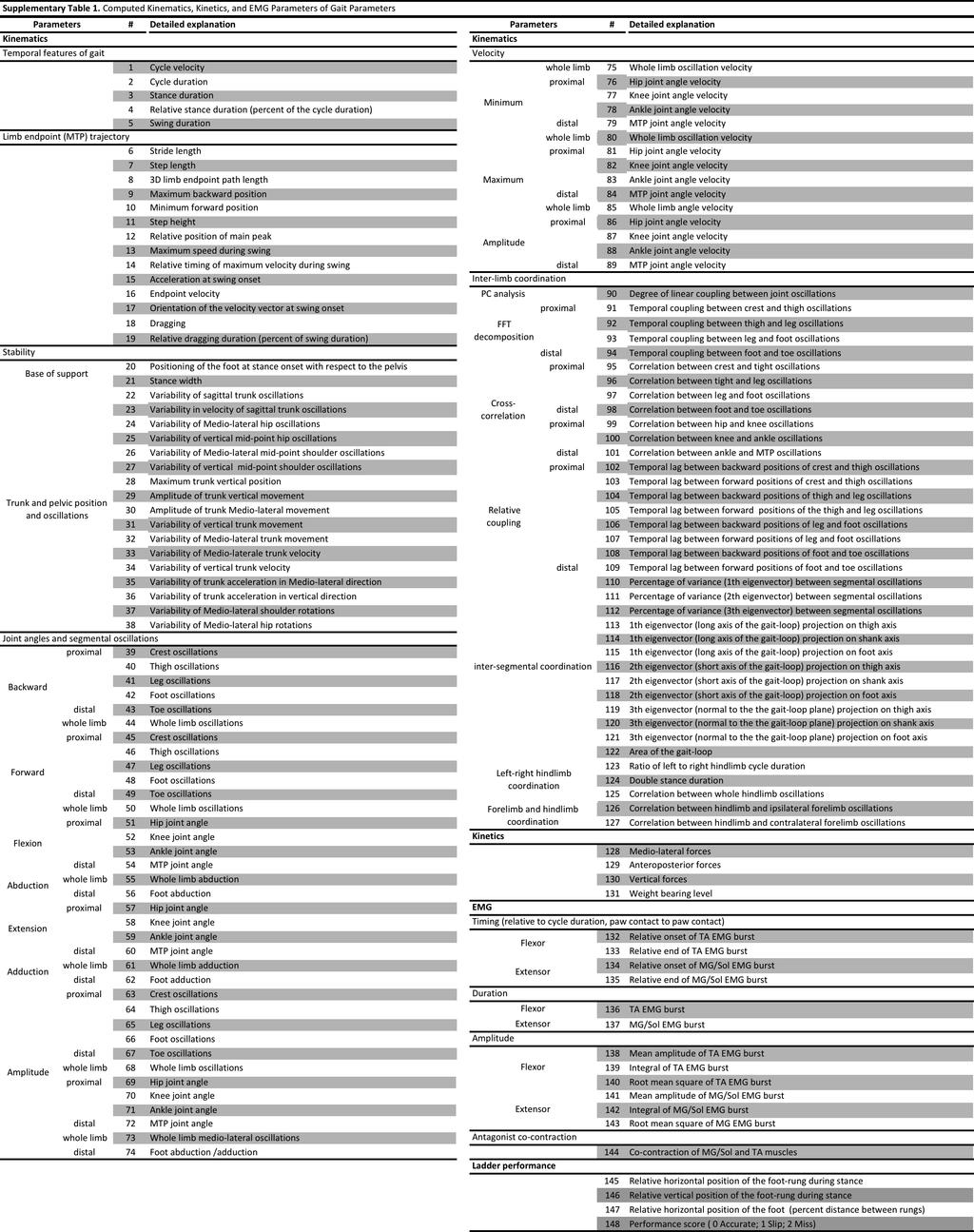
4 Supplementary Figure 3: Multi-step statistical analysis of gait parameters We used a set of experimental data from our database to exemplify the multi-step statistical analysis that was applied for all the experiments described in this study. Step1: For all the experimental conditions, we collected kinematic, kinetic and EMG data during continuous locomotion using an advanced recording system. Step 2: We computed a large number of parameters that provides a comprehensive quantification of gait features. The complete list of computed parameters can be found in Supplementary Table 1. The 1,2 analytic procedures and computations are detailed in Ref. Step 3: We applied a principal component (PC) analysis on all the variables computed from all the gait cycles from all the rats and experimental conditions. This analysis constructs new variables, i.e. PC, that linearly combines the original variables and maximizes the amount of explained variance for each successive PC. Due to the high degree of correlation between gait parameters during locomotion, a few PCs are sufficient to explain a large proportion of the variance. Step 4: The gait cycles can be represented in the new denoised space created by PC1-3. In the proposed example, data points associated with each experimental condition cluster in a well-defined location, indicating that the rats exhibited intervention-specific gait patterns. Typically, PC1 differentiated gait cycles from intact rats (or pre-lesion), altered gaits from rats with SCI or stroke, and the improvement of locomotion with the robotic interface. In some instances, PC2 captured an additional feature. In the proposed example, PC2 is related to specific features of the intervention compared to intact and no intervention. In order to provide a straightforward representation of differences between conditions, we applied a least square elliptic fitting to the 3D data points. Step 5: To quantify the quality of gait performance, we measured the 3D geometric distance between the averaged location of gait cycles from each rat in a given condition and the average location of all gait cycles from all intact (or pre-lesion) rats. For each rat and condition, we also measured the 3D dispersion of gait cycles to provide a measure of gait variability. au, arbitrary unit. Step 6: The scores
5 (position of gait cycles in the PC space) reveal which conditions are differentiated along each PC. Step 7: We then extracted the factor loadings, i.e. correlation between each variable and each PC. We selected the PC of interest based upon step 6, and regrouped the variables with the highest factor loading ( value > 0.5, p < 0.05) into functional clusters, which we named for clarity. Variables that load on the same PC correlate with each other. For instance, in the proposed example, improvement of hindlimb locomotion directly correlates with improved postural control. Step 8: To provide a more classic representation of differences between conditions, we generated histogram plots for one variable per extracted functional cluster. References 1. Courtine, G., et al.transformation of nonfunctional spinal circuits into functional states after the loss of brain input. Nat Neurosci 12, (2009). 2. Musienko, P., et al. Controlling Specific Locomotor Behaviors through Multidimensional Monoaminergic Modulation of Spinal Circuitries. J Neurosci 31, (2011).
 applied on all gait cycles and rats (n = 10 per rat and per condition). Least square fitting was performed and indexed for each rat independently.")
6 Supplementary Figure 4: Constant-force support leads to improved locomotor performance compared to spring-like support in rats with complete SCI a. PC analysis (explained variance, 48%) applied on all gait cycles and rats (n = 10 per rat and per condition). Least square fitting was performed and indexed for each rat independently. The histogram plot reports mean values (n = 5 rats) of scores on PC1 for gait cycles recorded in intact rats and in spinal rats stepping with the same level of spring-like vs. constant force vertical support. au, arbitrary unit. b. Variables (numbers refer to Supplementary Table 1) with the highest factor loadings on PC1 ( value > 0.5, p < 0.05) were regrouped in functional clusters. c. Histogram plots report mean values (n = 5 rats) for one variable per functional cluster for intact rats and spinal rats stepping with spring-like vs. constant force vertical support. **, significantly different from intact at p < 0.05.Error bars, S.E.M.
. 10 gait cycles were recorded for each level of constant-force BWS (40-90%).")
7 Supplementary Figure 5: Evaluation of the impact of weight bearing conditions on motor pattern generation in rats with complete SCI a. Rats (n = 4 rats) received a complete SCI. After 5 weeks of recovery, the rats received enabling factors to encourage bipedal locomotion on a treadmill (13 cm.s-1). 10 gait cycles were recorded for each level of constant-force BWS (40-90%). Locomotion was recorded in healthy rats (n = 5) at 60% of BWS, which is the weight normally carried by the hindlimbs during quadrupedal gait. b. Representative stick diagram decomposition of hindlimb motion during stance (black), dragging (red), and swing (light grey) for each level of BWS, as well as for an intact rat. Successive color-coded trajectories of the hindlimb endpoint (n = 10 steps) are shown together with the orientation and intensity of the foot velocity vector (arrow) at swing onset. The average (n = 10 steps, +/- S.D.) vertical ground reaction forces (left and right hindlimbs combined) and relative duration of the stance (filled box), swing (open box), and drag (red) phases of gait are displayed at the bottom. c. Relationship between the level of BWS and the degree of gait pattern similarity compared to healthy rats (grey hemi-sphere), measured as the 3D distance from gait cycles in the PC analysis. The size of the spheres is proportional to gait variability, measured as the dispersion of each cluster in the PC analysis (See Supplementary Figure 3). A second-order polynomial fitting was applied to the data points to highlight the U-shaped relationship between stepping quality and BWS levels. au, arbitrary unit. d. Variables (numbers refer to Supplementary Table 1) with the highest factor loadings on PC1 ( value > 0.5, p < 0.05) were regrouped in functional clusters. e. Histogram plots report mean values (n = 4 rats; error bar, S.E.M.) for one variable per functional cluster under the different levels of BWS. **, significantly different from intact at p < Error bars, S.E.M.
 while providing constant-force vertical support.")
8 Supplementary Figure 6: The robotic propulsive neuroprosthesis enables coordinated overground locomotion in spinal rats a. Spinal rats were positioned bipedally in the robotic interface. The robot was configured to move the body forward at a constant velocity (13 cm.s 1) while providing constant-force vertical support. Below the stick diagram decomposition of hindlimb motion and limb endpoint trajectories, the traces show angular oscillations of both hindlimbs, EMG activity of left and right MG and TA muscles, and vertical forces during a representative trial performed without stimulations. b. To enable hindlimb locomotion, rats received tonic epidural electrical stimulation at spinal segments S1 and L2, as well as a combination of agonists to 5HT1A, 5HT2A/C, 5HT7, and DA1-like receptors. c. With these stimulations, the spinal rats displayed tonic activity in left and right extensor muscles, and could stand for extensive periods of time. d. The animals immediately exhibited coordinated plantar stepping with alternation between both hindlimbs when the robot translated the trunk in the forward direction to replace the lost propulsive capacities.

9 Supplementary Figure 7: Improved balance control with the postural neuroprosthesis correlates with improved hindlimb locomotion and performance during locomotion along a ladder with irregularly spaced rungs in rats with a cortical stroke a. PC analysis was applied on all gait cycles recorded along the ladder in all the rats (n = 5) before and 2 days after lesion with and without vertical constant-force robotic support. Accurate and missed steps were both included in this analysis, but undifferentiated in the plot to emphasize the contrast between the conditions with and without robot. au, arbitrary unit. b. The histogram plot reports the mean values (n = 5 rats) of scores on PC1. c. Variables (numbers refer to Supplementary Table 1) with the highest factor loadings on PC1 ( value > 0.5, p < 0.05) were regrouped in functional clusters. d. Histogram plots report mean values (n = 5 rats) for one variable per functional cluster, except for the improved measures of success that are reported in Figure 3b. **, significantly different from intact at p < Error bar, S.E.M.

10 Supplementary Figure 8: Improved balance control with the postural neuroprosthesis correlates with improved hindlimb locomotion during straight horizontal runway locomotion in rats with moderate and severe SCI a. Stick diagram decomposition of hindlimb motion, hindlimb oscillations, and EMG activity of Sol and TA muscles recorded pre-lesion as well as 10 days after a lateral cervical (C7) hemisection with and without constant-force robotic support. b. PC analysis was applied on all gait cycles recorded in all the rats (n = 5) before and 10 days after lesion with and without robotic support. c. The histogram plot reports mean values (n = 5 rats) of the 3D distance from the mean location of pre-lesion gaits in the PC space. d. PC1 scores. e. Hindlimb kinematics and EMG activity of MG and TA muscles recorded pre-lesion as well as 12 days after staggered lateral hemisections without enabling factors (no stimulations) as well as with stimulations without and with constant-force robotic support. f. PC analysis was applied on all gait cycles recorded in all the rats (n = 5) before and 10 days after lesion without stimulations as well as with and without robotic support. g. The histogram plot reports mean values (n = 5 rats) of the 3D distance between the different experimental conditions and the mean location of pre-lesion gaits in the PC space. h. PC1 differentiates actual stepping vs. paralysis, while PC2 highlights the improvement of locomotion with the postural neuroprosthesis. **, significantly different from intact at p < au, arbitrary unit. Error bar, S.E.M.
 of scores on PC1 for gait cycles recorded before as well as 10 days after a lateral cervical (C7) hemisection without and with constant-force robotic")
11 Supplementary Figure 9: Improved balance control with the postural neuroprosthesis correlates with improved hindlimb locomotion during locomotion on a staircase in rats with moderate SCI a. Histogram plots report mean values (n = 5 rats) of scores on PC1 for gait cycles recorded before as well as 10 days after a lateral cervical (C7) hemisection without and with constant-force robotic support.au arbitrary unit. b. Variables (numbers refer to Supplementary Table 1) with the highest factor loadings on PC1 ( value > 0.5, p < 0.05) were regrouped in functional clusters. c. Histogram plots report mean values (n = 5 rats) for one variable per functional cluster. **, significantly different from intact at p < 0.05.Error bar, S.E.M.
 of scores on PC1 and PC2 for gait cycles recorded before the lesion and 12 days after staggered lateral hemisections under the various experimental")
12 Supplementary Figure 10: Improved balance control with the postural neuroprosthesis correlates with improved hindlimb locomotion during locomotion on a staircase in rats with severe SCI a. Histogram plots report mean values (n = 5 rats) of scores on PC1 and PC2 for gait cycles recorded before the lesion and 12 days after staggered lateral hemisections under the various experimental conditions. PC1 captures the effect of motor control enabling factors, which promoted hindlimb motion in otherwise paralyzed rats. PC2 captures the improvements of hindlimb locomotion and balance control with the robotic interface. au, arbitrary unit. b. Variables (numbers refer to Supplementary Table 1) with the highest factor loadings on PC2 ( value > 0.5, p < 0.05) were regrouped in functional clusters. c. Histogram plots report mean values (n = 5 rats; error bar, S.E.M.) for one variable per functional cluster under the different experimental conditions. **, significantly different from intact at p < error bar, S.E.M.
13
Transformation of nonfunctional spinal circuits into functional states after the loss of brain input
 Transformation of nonfunctional spinal circuits into functional states after the loss of brain input G. Courtine, Y. P. Gerasimenko, R. van den Brand, A. Yew, P. Musienko, H. Zhong, B. Song, Y. Ao, R.
Transformation of nonfunctional spinal circuits into functional states after the loss of brain input G. Courtine, Y. P. Gerasimenko, R. van den Brand, A. Yew, P. Musienko, H. Zhong, B. Song, Y. Ao, R.
Versatile robotic interface to evaluate, enable and train locomotion and balance after neuromotor disorders
 Versatile robotic interface to evaluate, enable and train locomotion and balance after neuromotor disorders Nadia Dominici 1,2,8, Urs Keller 3,8, Heike Vallery 3,4, Lucia Friedli 1,2, Rubia van den Brand
Versatile robotic interface to evaluate, enable and train locomotion and balance after neuromotor disorders Nadia Dominici 1,2,8, Urs Keller 3,8, Heike Vallery 3,4, Lucia Friedli 1,2, Rubia van den Brand
-Elastic strain energy (duty factor decreases at higher speeds). Higher forces act on feet. More tendon stretch. More energy stored in tendon.
. Higher forces act on feet. More tendon stretch. More energy stored in tendon.") As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
Supplementary Materials for
 www.sciencetranslationalmedicine.org/cgi/content/full/6/255/255ra133/dc1 for Closed-loop neuromodulation of spinal sensorimotor circuits controls refined locomotion after complete spinal cord injury Nikolaus
www.sciencetranslationalmedicine.org/cgi/content/full/6/255/255ra133/dc1 for Closed-loop neuromodulation of spinal sensorimotor circuits controls refined locomotion after complete spinal cord injury Nikolaus
Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a)
") Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a) Side and ventral images of adult female flies used to calculate the sizes of body and leg segments. Scale bar is 0.3 mm. Green,
Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a) Side and ventral images of adult female flies used to calculate the sizes of body and leg segments. Scale bar is 0.3 mm. Green,
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT
 EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT PROJECT REFERENCE NO. : 37S0925 COLLEGE : NEW HORIZON COLLEGE OF ENGINEERING, BANGALORE BRANCH : MECHANICAL ENGINEERING GUIDES : DR GANESHA PRASAD
EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT PROJECT REFERENCE NO. : 37S0925 COLLEGE : NEW HORIZON COLLEGE OF ENGINEERING, BANGALORE BRANCH : MECHANICAL ENGINEERING GUIDES : DR GANESHA PRASAD
Sample Solution for Problem 1.a
 Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY
 Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg. Abstract
 Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system
 An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
KINEMATIC QUANTIFICATION OF GAIT SYMMETRY BASED ON BILATERAL CYCLOGRAMS
 KINEMATIC QUANTIFICATION OF GAIT SYMMETRY BASED ON BILATERAL CYCLOGRAMS Ambarish Goswami Honda Research Institute Mountain View, California, USA agoswami@honda-ri.com Abstract Symmetry is considered to
KINEMATIC QUANTIFICATION OF GAIT SYMMETRY BASED ON BILATERAL CYCLOGRAMS Ambarish Goswami Honda Research Institute Mountain View, California, USA agoswami@honda-ri.com Abstract Symmetry is considered to
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
+ t1 t2 moment-time curves
 Part 6 - Angular Kinematics / Angular Impulse 1. While jumping over a hurdle, an athlete s hip angle was measured to be 2.41 radians. Within 0.15 seconds, the hurdler s hip angle changed to be 3.29 radians.
Part 6 - Angular Kinematics / Angular Impulse 1. While jumping over a hurdle, an athlete s hip angle was measured to be 2.41 radians. Within 0.15 seconds, the hurdler s hip angle changed to be 3.29 radians.
Improvement of the Cheetah Locomotion Control
 Improvement of the Cheetah Locomotion Control Master Project - Midterm Presentation 3 rd November 2009 Student : Supervisor : Alexander Sproewitz Professor : Auke Jan Ijspeert Presentation of the Cheetah
Improvement of the Cheetah Locomotion Control Master Project - Midterm Presentation 3 rd November 2009 Student : Supervisor : Alexander Sproewitz Professor : Auke Jan Ijspeert Presentation of the Cheetah
Decentralized Autonomous Control of a Myriapod Locomotion Robot
 Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Development of an end-effector to simulate the foot to ball interaction of an instep kick in soccer
 Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 284 289 9 th Conference of the International Sports Engineering Association (ISEA) Development of an end-effector to simulate the
Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 284 289 9 th Conference of the International Sports Engineering Association (ISEA) Development of an end-effector to simulate the
Nature Neuroscience: doi: /nn Supplementary Figure 1. Visual responses of the recorded LPTCs
 Supplementary Figure 1 Visual responses of the recorded LPTCs (a) The mean±sd (n=3 trials) of the direction-selective (DS) responses (i.e., subtracting the null direction, ND, from the preferred direction,
Supplementary Figure 1 Visual responses of the recorded LPTCs (a) The mean±sd (n=3 trials) of the direction-selective (DS) responses (i.e., subtracting the null direction, ND, from the preferred direction,
1. A tendency to roll or heel when turning (a known and typically constant disturbance) 2. Motion induced by surface waves of certain frequencies.
 2. Motion induced by surface waves of certain frequencies.") Department of Mechanical Engineering Massachusetts Institute of Technology 2.14 Analysis and Design of Feedback Control Systems Fall 2004 October 21, 2004 Case Study on Ship Roll Control Problem Statement:
Department of Mechanical Engineering Massachusetts Institute of Technology 2.14 Analysis and Design of Feedback Control Systems Fall 2004 October 21, 2004 Case Study on Ship Roll Control Problem Statement:
Impact Points and Their Effect on Trajectory in Soccer
 Proceedings Impact Points and Their Effect on Trajectory in Soccer Kaoru Kimachi 1, *, Sungchan Hong 2, Shuji Shimonagata 3 and Takeshi Asai 2 1 Doctoral Program of Coaching Science, University of Tsukuba,
Proceedings Impact Points and Their Effect on Trajectory in Soccer Kaoru Kimachi 1, *, Sungchan Hong 2, Shuji Shimonagata 3 and Takeshi Asai 2 1 Doctoral Program of Coaching Science, University of Tsukuba,
Simulation of the Hybtor Robot
 Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING
 OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
Biomechanics Sample Problems
 Biomechanics Sample Problems Forces 1) A 90 kg ice hockey player collides head on with an 80 kg ice hockey player. If the first person exerts a force of 450 N on the second player, how much force does
Biomechanics Sample Problems Forces 1) A 90 kg ice hockey player collides head on with an 80 kg ice hockey player. If the first person exerts a force of 450 N on the second player, how much force does
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices
 A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
Adaptation to Knee Flexion Torque Assistance in Double Support Phase
 Adaptation to Knee Flexion Torque Assistance in Double Support Phase James S. Sulzer, Keith E. Gordon, T. George Hornby, Michael A. Peshkin and James L. Patton Abstract Studies have shown locomotor adaptation
Adaptation to Knee Flexion Torque Assistance in Double Support Phase James S. Sulzer, Keith E. Gordon, T. George Hornby, Michael A. Peshkin and James L. Patton Abstract Studies have shown locomotor adaptation
APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS
 APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS INTRODUCTION Ken'ichi Egawa, T. Tsuboi, T. Satoh, and M. Miyazaki Graduate School of Human Sciences, Waseda University Three dimensional
APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS INTRODUCTION Ken'ichi Egawa, T. Tsuboi, T. Satoh, and M. Miyazaki Graduate School of Human Sciences, Waseda University Three dimensional
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots
 ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
Center of Mass Acceleration as a Surrogate for Force Production After Spinal Cord Injury Effects of Inclined Treadmill Walking
 Center of Mass Acceleration as a Surrogate for Force Production After Spinal Cord Injury Effects of Inclined Treadmill Walking Mark G. Bowden, PhD, PT Research Health Scientist, Ralph H. Johnson VA Medical
Center of Mass Acceleration as a Surrogate for Force Production After Spinal Cord Injury Effects of Inclined Treadmill Walking Mark G. Bowden, PhD, PT Research Health Scientist, Ralph H. Johnson VA Medical
(2) BIOMECHANICS of TERRESTRIAL LOCOMOTION
 BIOMECHANICS of TERRESTRIAL LOCOMOTION") (2) BIOMECHANICS of TERRESTRIAL LOCOMOTION Questions: - How does size influence the mode and speed of locomotion? - What determines the energy cost of locomotion? - Why do humans walk and run the way we
(2) BIOMECHANICS of TERRESTRIAL LOCOMOTION Questions: - How does size influence the mode and speed of locomotion? - What determines the energy cost of locomotion? - Why do humans walk and run the way we
Inertial compensation for belt acceleration in an instrumented treadmill
 Inertial compensation for belt acceleration in an instrumented treadmill Sandra K. Hnat, Antonie J. van den Bogert Department of Mechanical Engineering, Cleveland State University Cleveland, OH 44115,
Inertial compensation for belt acceleration in an instrumented treadmill Sandra K. Hnat, Antonie J. van den Bogert Department of Mechanical Engineering, Cleveland State University Cleveland, OH 44115,
The Design and Performance of DASH
 The Design and Performance of DASH Paul Birkmeyer Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2010-75 http://www.eecs.berkeley.edu/pubs/techrpts/2010/eecs-2010-75.html
The Design and Performance of DASH Paul Birkmeyer Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2010-75 http://www.eecs.berkeley.edu/pubs/techrpts/2010/eecs-2010-75.html
The Journal of Physiology
 J Physiol 590.7 (2012) pp 1721 1736 1721 The upright posture improves plantar stepping and alters responses to serotonergic drugs in spinal rats Urszula Sławińska 1, Henryk Majczyński 1, Yue Dai 2 and
J Physiol 590.7 (2012) pp 1721 1736 1721 The upright posture improves plantar stepping and alters responses to serotonergic drugs in spinal rats Urszula Sławińska 1, Henryk Majczyński 1, Yue Dai 2 and
Active Orthosis for Ankle Articulation Pathologies
 Active Orthosis for Ankle Articulation Pathologies Carlos André Freitas Vasconcelos IST, Universidade Técnica de Lisboa Av. Rovisco Pais, 1049-001 Lisboa, Portugal Email: cafv@mail.com Abstract This work
Active Orthosis for Ankle Articulation Pathologies Carlos André Freitas Vasconcelos IST, Universidade Técnica de Lisboa Av. Rovisco Pais, 1049-001 Lisboa, Portugal Email: cafv@mail.com Abstract This work
GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE. by Mehmet Temel
 GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE by Mehmet Temel A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the
GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE by Mehmet Temel A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the
Walking Simulator Mechanism
 The Downtown Review Volume 2 Issue 2 Article 4 2015 Walking Simulator Mechanism Titus Lungu Cleveland State University Igor Tachynskyy Cleveland State University Omri Tayyara Cleveland State University
The Downtown Review Volume 2 Issue 2 Article 4 2015 Walking Simulator Mechanism Titus Lungu Cleveland State University Igor Tachynskyy Cleveland State University Omri Tayyara Cleveland State University
Putting Report Details: Key and Diagrams: This section provides a visual diagram of the. information is saved in the client s database
 Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis.
 Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis. D.Moser, N.Stech, J.McCarthy, G.Harris, S.Zahedi, A.McDougall Summary This study reports
Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis. D.Moser, N.Stech, J.McCarthy, G.Harris, S.Zahedi, A.McDougall Summary This study reports
Neurorehabil Neural Repair Oct 23. [Epub ahead of print]
![Neurorehabil Neural Repair Oct 23. [Epub ahead of print]](/thumbs/86/94477916.jpg "Neurorehabil Neural Repair Oct 23. [Epub ahead of print]") APPENDICE Neurorehabil Neural Repair. 2009 Oct 23. [Epub ahead of print] Segmental Muscle Vibration Improves Walking in Chronic Stroke Patients With Foot Drop: A Randomized Controlled Trial. Paoloni M,
APPENDICE Neurorehabil Neural Repair. 2009 Oct 23. [Epub ahead of print] Segmental Muscle Vibration Improves Walking in Chronic Stroke Patients With Foot Drop: A Randomized Controlled Trial. Paoloni M,
Stable Upright Walking and Running using a simple Pendulum based Control Scheme
 1 Stable Upright Walking and Running using a simple Pendulum based Control Scheme H.-M. MAUS, J. RUMMEL and A. SEYFARTH Lauflabor Locomotion Laboratory, University of Jena, Germany E-mail: moritz.maus@uni-jena.de
1 Stable Upright Walking and Running using a simple Pendulum based Control Scheme H.-M. MAUS, J. RUMMEL and A. SEYFARTH Lauflabor Locomotion Laboratory, University of Jena, Germany E-mail: moritz.maus@uni-jena.de
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
Design of a double quadruped for the Tech United soccer robot
 Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
intended velocity ( u k arm movements
 Fig. A Complete Brain-Machine Interface B Human Subjects Closed-Loop Simulator ensemble action potentials (n k ) ensemble action potentials (n k ) primary motor cortex simulated primary motor cortex neuroprosthetic
Fig. A Complete Brain-Machine Interface B Human Subjects Closed-Loop Simulator ensemble action potentials (n k ) ensemble action potentials (n k ) primary motor cortex simulated primary motor cortex neuroprosthetic
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Differential Kinematics, Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
CS 4649/7649 Robot Intelligence: Planning Differential Kinematics, Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
Gait Analyser. Description of Walking Performance
 Gait Analyser Description of Walking Performance This brochure will help you to understand clearly the parameters described in the report of the Gait Analyser, provide you with tips to implement the walking
Gait Analyser Description of Walking Performance This brochure will help you to understand clearly the parameters described in the report of the Gait Analyser, provide you with tips to implement the walking
Simulation-based design to reduce metabolic cost
 Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
Walking with coffee: when and why coffee spills
 Walking with coffee: when and why coffee spills Hans C. Mayer and Rouslan Krechetnikov Department of Mechanical Engineering University of California at Santa Barbara February 20-24, 2012 Page 1/25 Motivation
Walking with coffee: when and why coffee spills Hans C. Mayer and Rouslan Krechetnikov Department of Mechanical Engineering University of California at Santa Barbara February 20-24, 2012 Page 1/25 Motivation
University of Kassel Swim Start Research
 University of Kassel Swim Start Research Sebastian Fischer & Armin Kibele Institute for Sports and Sport Science, University of Kassel, Germany Research Fields: Swim Start research I. Materials and Equipment
University of Kassel Swim Start Research Sebastian Fischer & Armin Kibele Institute for Sports and Sport Science, University of Kassel, Germany Research Fields: Swim Start research I. Materials and Equipment
A ROBOTIC STEPPER FOR RETRAINING LOCOMOTION IN SPINAL-INJURED RODENTS
 Proceedings of the 2000 IEEE International Conference on Robotics & Automation San Francisco, CA April 2000 A ROBOTIC STEPPER FOR RETRAINING LOCOMOTION IN SPINAL-INJURED RODENTS D.J. Reinkensmeyer', W.K.
Proceedings of the 2000 IEEE International Conference on Robotics & Automation San Francisco, CA April 2000 A ROBOTIC STEPPER FOR RETRAINING LOCOMOTION IN SPINAL-INJURED RODENTS D.J. Reinkensmeyer', W.K.
Motor function analysis: from animal models to patients
 Motor function analysis: from animal models to patients ZNZ lecture 27.04.2016 Linard Filli Sensorimotor Lab University Hospital Zurich Linard.Filli@usz.ch Content of lecture Basic neuroanatomy of motor
Motor function analysis: from animal models to patients ZNZ lecture 27.04.2016 Linard Filli Sensorimotor Lab University Hospital Zurich Linard.Filli@usz.ch Content of lecture Basic neuroanatomy of motor
WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS
 WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS Teruaki Ito Institute of Technology and Science University of Tokushima Tokushima, Japan e-mail: ito@me.tokushima-u.ac.jp Abstract Human walking
WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS Teruaki Ito Institute of Technology and Science University of Tokushima Tokushima, Japan e-mail: ito@me.tokushima-u.ac.jp Abstract Human walking
Conditionally accepted to Robotica
 Robot-Assisted Locomotion Training after Spinal Cord Injury: Comparison of Rodent Stepping in Virtual and Physical Treadmill Environments W.K. Timoszyk 1, R.D. de Leon 2, N. London 2, R. Joynes 2, K. Minakata
Robot-Assisted Locomotion Training after Spinal Cord Injury: Comparison of Rodent Stepping in Virtual and Physical Treadmill Environments W.K. Timoszyk 1, R.D. de Leon 2, N. London 2, R. Joynes 2, K. Minakata
Applying Hooke s Law to Multiple Bungee Cords. Introduction
 Applying Hooke s Law to Multiple Bungee Cords Introduction Hooke s Law declares that the force exerted on a spring is proportional to the amount of stretch or compression on the spring, is always directed
Applying Hooke s Law to Multiple Bungee Cords Introduction Hooke s Law declares that the force exerted on a spring is proportional to the amount of stretch or compression on the spring, is always directed
Development of Fish type Robot based on the Analysis of Swimming Motion of Bluefin Tuna Comparison between Tuna-type Fin and Rectangular Fin -
 Development of Fish type Robot based on the Analysis of Swimming Motion of Bluefin Tuna Comparison between Tuna-type Fin and Rectangular Fin - Katsuya KUGAI* Abstract The swimming motion of Tuna type fishes
Development of Fish type Robot based on the Analysis of Swimming Motion of Bluefin Tuna Comparison between Tuna-type Fin and Rectangular Fin - Katsuya KUGAI* Abstract The swimming motion of Tuna type fishes
Complex movement patterns of a bipedal walk
 1 Complex movement patterns of a bipedal walk Objectives After completing this lesson, you will be able to: Describe the complex movement patterns of a bipedal walk. Describe the biomechanics of walking
1 Complex movement patterns of a bipedal walk Objectives After completing this lesson, you will be able to: Describe the complex movement patterns of a bipedal walk. Describe the biomechanics of walking
ITF Coaches Education Programme Biomechanics of the forehand stroke
 ITF Coaches Education Programme Biomechanics of the forehand stroke Original article: Bahamonde, R. (2001). ITF CSSR, 24, 6-8 Introduction The tennis forehand stroke has changed drastically over the last
ITF Coaches Education Programme Biomechanics of the forehand stroke Original article: Bahamonde, R. (2001). ITF CSSR, 24, 6-8 Introduction The tennis forehand stroke has changed drastically over the last
Numerical study on the wrist action during the golf downswing
 Numerical study on the wrist action during the golf downswing C.C. Chen, Y. Inoue and K. Shibara Department of Intelligent Mechanical Systems Engineering, Kochi University of Technology, Kochi-prefecture,
Numerical study on the wrist action during the golf downswing C.C. Chen, Y. Inoue and K. Shibara Department of Intelligent Mechanical Systems Engineering, Kochi University of Technology, Kochi-prefecture,
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
Bio-inspired Methodology for Sprawling Posture Robotic Foot Design. Semester project presentation. Laura Paez
 Bio-inspired Methodology for Sprawling Posture Robotic Foot Design Semester project presentation Laura Paez Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions
Bio-inspired Methodology for Sprawling Posture Robotic Foot Design Semester project presentation Laura Paez Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions
Body Stabilization of PDW toward Humanoid Walking
 Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
SCHEINWORKS Measuring and Analysis Systems by
 Pressure Measurement Systems for standing and walking analysis Germany since 1879 Pressure Measurement Systems for standing and walking analysis Documentation of Gait image Stance Symmetry of all parameters
Pressure Measurement Systems for standing and walking analysis Germany since 1879 Pressure Measurement Systems for standing and walking analysis Documentation of Gait image Stance Symmetry of all parameters
Velocity Based Stability Margins for Fast Bipedal Walking
 Velocity Based Stability Margins for Fast Bipedal Walking Jerry E. Pratt 1 and Russ Tedrake 2 1 Florida Institute for Human and Machine Cognition jpratt@ihmc.us 2 Massachusettes Institute of Technology
Velocity Based Stability Margins for Fast Bipedal Walking Jerry E. Pratt 1 and Russ Tedrake 2 1 Florida Institute for Human and Machine Cognition jpratt@ihmc.us 2 Massachusettes Institute of Technology
A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking
 1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
Digital Level Control One and Two Loops Proportional and Integral Control Single-Loop and Cascade Control
 Digital Level Control One and Two Loops Proportional and Integral Control Single-Loop and Cascade Control Introduction This experiment offers a look into the broad field of process control. This area of
Digital Level Control One and Two Loops Proportional and Integral Control Single-Loop and Cascade Control Introduction This experiment offers a look into the broad field of process control. This area of
Gait. Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa
 Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Joint Torque Evaluation of Lower Limbs in Bicycle Pedaling
 11th conference of the International Sports Engineering Association, ISEA 216 Delft University of Technology; July 12 th Joint Torque Evaluation of Lower Limbs in Bicycle Pedaling Hiroki Yamazaki Akihiro
11th conference of the International Sports Engineering Association, ISEA 216 Delft University of Technology; July 12 th Joint Torque Evaluation of Lower Limbs in Bicycle Pedaling Hiroki Yamazaki Akihiro
Selective control of gait subtasks in robotic gait training: foot clearance support in stroke survivors with a powered exoskeleton
 Koopman et al. Journal of NeuroEngineering and Rehabilitation 2013, 10:3 JOURNAL OF NEUROENGINEERING JNERAND REHABILITATION RESEARCH Open Access Selective control of gait subtasks in robotic gait training:
Koopman et al. Journal of NeuroEngineering and Rehabilitation 2013, 10:3 JOURNAL OF NEUROENGINEERING JNERAND REHABILITATION RESEARCH Open Access Selective control of gait subtasks in robotic gait training:
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
IAC-13-A1.6.1 THE ANALYSIS OF THE RELATIONSHIP BETWEEN MOTION RESTRAINTS CAUSED BY PRESSURIZED SUITS AND RISK OF FALLING
 IAC-13-A1.6.1 THE ANALYSIS OF THE RELATIONSHIP BETWEEN MOTION RESTRAINTS CAUSED BY PRESSURIZED SUITS AND RISK OF FALLING Yasuhiro Akiyama Nagoya University, Japan, akiyama-yasuhiro@mech.nagoya-u.ac.jp
IAC-13-A1.6.1 THE ANALYSIS OF THE RELATIONSHIP BETWEEN MOTION RESTRAINTS CAUSED BY PRESSURIZED SUITS AND RISK OF FALLING Yasuhiro Akiyama Nagoya University, Japan, akiyama-yasuhiro@mech.nagoya-u.ac.jp
Fish Biorobotics. Fishes as model systems for understanding aquatic propulsion. George V. Lauder Harvard University
 Fish Biorobotics Fishes as model systems for understanding aquatic propulsion 28,000 species of fishes Half of all vertebrates are fishes Fishes are 550 million years old Tremendous opportunity for selection
Fish Biorobotics Fishes as model systems for understanding aquatic propulsion 28,000 species of fishes Half of all vertebrates are fishes Fishes are 550 million years old Tremendous opportunity for selection
Servo-Assisted Lower-Body Exoskeleton With a True Running Gait
 Servo-Assisted Lower-Body Exoskeleton With a True Running Gait John Dick and Bruce Crapuchettes Applied Motion, Inc. 935 N. Indian Hill Blvd. Claremont, CA 91711 jdick@springwalker.com DARPA Workshop on
Servo-Assisted Lower-Body Exoskeleton With a True Running Gait John Dick and Bruce Crapuchettes Applied Motion, Inc. 935 N. Indian Hill Blvd. Claremont, CA 91711 jdick@springwalker.com DARPA Workshop on
Normal and Abnormal Gait
 Normal and Abnormal Gait Adrielle Fry, MD EvergreenHealth, Division of Sport and Spine University of Washington Board Review Course March 6, 2017 What are we going to cover? Definitions and key concepts
Normal and Abnormal Gait Adrielle Fry, MD EvergreenHealth, Division of Sport and Spine University of Washington Board Review Course March 6, 2017 What are we going to cover? Definitions and key concepts
ABSTRACT. ambulatory aid by individuals with this type of permanent disability. This study
 ABSTRACT Title of dissertation: MODELING CRUTCH COMPENSATION OF HIP ABDUCTOR WEAKNESS AND PARALYSIS James Rocco Borrelli, Doctor of Philosophy, 2011 Dissertation directed by: Henry W. Haslach Jr. Department
ABSTRACT Title of dissertation: MODELING CRUTCH COMPENSATION OF HIP ABDUCTOR WEAKNESS AND PARALYSIS James Rocco Borrelli, Doctor of Philosophy, 2011 Dissertation directed by: Henry W. Haslach Jr. Department
Ambulatory monitoring of gait quality with wearable inertial sensors
 Ambulatory monitoring of gait quality with wearable inertial sensors Dr. Philippe Terrier, PhD June 2016 Summary 1. Why? Reasons for measuring gait in real life conditions 2. What? Real-life assessment
Ambulatory monitoring of gait quality with wearable inertial sensors Dr. Philippe Terrier, PhD June 2016 Summary 1. Why? Reasons for measuring gait in real life conditions 2. What? Real-life assessment
Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF
 Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF George Chen May 17, 2002 Stanford Neuromuscular Biomechanics Lab Group Muscle contribution
Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF George Chen May 17, 2002 Stanford Neuromuscular Biomechanics Lab Group Muscle contribution
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Design and Simulation of Legged Walking Robots in MATLAB Environment
 20 Design and Simulation of Legged Walking Robots in MATLAB Environment Conghui Liang, Marco Ceccarelli and Giuseppe Carbone LARM: Laboratory of Robotics and Mechatronics, University of Cassino Italy 1.
20 Design and Simulation of Legged Walking Robots in MATLAB Environment Conghui Liang, Marco Ceccarelli and Giuseppe Carbone LARM: Laboratory of Robotics and Mechatronics, University of Cassino Italy 1.
Positive running posture sums up the right technique for top speed
 Positive running, a model for high speed running Frans Bosch positive running posture sums up the right technique for top speed building blocks in running: Pelvic rotation for- and backward and hamstring
Positive running, a model for high speed running Frans Bosch positive running posture sums up the right technique for top speed building blocks in running: Pelvic rotation for- and backward and hamstring
Ecole doctorale SMAER Sciences Mécaniques, Acoustique, Electronique, Robotique
 Thesis subject 2017 Laboratory : Institut des Systèmes Intelligents et de Robotiques (ISIR) CNRS UMR 7222 University: Université Pierre et Marie Curie Title of the thesis: Development of a Body-Machine-Interface
Thesis subject 2017 Laboratory : Institut des Systèmes Intelligents et de Robotiques (ISIR) CNRS UMR 7222 University: Université Pierre et Marie Curie Title of the thesis: Development of a Body-Machine-Interface
Design Of A Running Robot And The Effects Of Foot Placement In The Transverse Plane
 Purdue University Purdue e-pubs Open Access Theses Theses and Dissertations 2013 Design Of A Running Robot And The Effects Of Foot Placement In The Transverse Plane Timothy James Sullivan Purdue University,
Purdue University Purdue e-pubs Open Access Theses Theses and Dissertations 2013 Design Of A Running Robot And The Effects Of Foot Placement In The Transverse Plane Timothy James Sullivan Purdue University,
Equine Cannon Angle System
 Equine Cannon System How to interpret the results December 2010 Page 1 of 14 Table of Contents Introduction... 3 The Sagittal Plane... 4 The Coronal Plane... 5 Results Format... 6 How to Interpret the
Equine Cannon System How to interpret the results December 2010 Page 1 of 14 Table of Contents Introduction... 3 The Sagittal Plane... 4 The Coronal Plane... 5 Results Format... 6 How to Interpret the
LOCOMOTOR training using body weight support on
 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 15, NO. 3, SEPTEMBER 2007 387 A Robot and Control Algorithm That Can Synchronously Assist in Naturalistic Motion During Body-Weight-Supported
IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 15, NO. 3, SEPTEMBER 2007 387 A Robot and Control Algorithm That Can Synchronously Assist in Naturalistic Motion During Body-Weight-Supported
Study of Dynamic Biped Locomotion on Rugged Terrain - Derivation and Application of the Linear Inverted Pendulum Mode -
 Proceedings of the 1991 IEEE Intemational Conference on Robotics and Automation Sacramento, California - April 1991 Study of Dynamic Biped Locomotion on Rugged Terrain - Derivation and Application of the
Proceedings of the 1991 IEEE Intemational Conference on Robotics and Automation Sacramento, California - April 1991 Study of Dynamic Biped Locomotion on Rugged Terrain - Derivation and Application of the
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance
 Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
The effects of a suspended-load backpack on gait
 Industrial and Manufacturing Systems Engineering Publications Industrial and Manufacturing Systems Engineering 2009 The effects of a suspended-load backpack on gait Xu Xu North Carolina State University
Industrial and Manufacturing Systems Engineering Publications Industrial and Manufacturing Systems Engineering 2009 The effects of a suspended-load backpack on gait Xu Xu North Carolina State University
Data-Informed Modeling of Milligram-Scale Quadrupedal Robot Locomotion
 Data-Informed Modeling of Milligram-Scale Quadrupedal Robot Locomotion Walker Gosrich, Ryan St. Pierre, and Sarah Bergbreiter Abstract This work uses the microquad, a quadrupedal, magnetically actuated
Data-Informed Modeling of Milligram-Scale Quadrupedal Robot Locomotion Walker Gosrich, Ryan St. Pierre, and Sarah Bergbreiter Abstract This work uses the microquad, a quadrupedal, magnetically actuated
BODY FORM INFLUENCES ON THE DRAG EXPERIENCED BY JUNIOR SWIMMERS. Australia, Perth, Australia
 1 BODY FORM INFLUENCES ON THE DRAG EXPERIENCED BY JUNIOR SWIMMERS Andrew Lyttle 1, Nat Benjanuvatra 2, Brian A Blanksby 2, Bruce C Elliott 2 1 Western Australian Institute of Sport, Perth, Australia 2
1 BODY FORM INFLUENCES ON THE DRAG EXPERIENCED BY JUNIOR SWIMMERS Andrew Lyttle 1, Nat Benjanuvatra 2, Brian A Blanksby 2, Bruce C Elliott 2 1 Western Australian Institute of Sport, Perth, Australia 2
Gait analysis for the development of the biped robot foot structure
 Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Clinical view on ambulation in patients with Spinal Cord Injury
 Clinical view on ambulation in patients with Spinal Cord Injury Sasa Moslavac Spinal Unit, Special Medical Rehabilitation Hospital, Varazdinske Toplice,, Croatia 1 Spinal Cord Injury (SCI) to walk again
Clinical view on ambulation in patients with Spinal Cord Injury Sasa Moslavac Spinal Unit, Special Medical Rehabilitation Hospital, Varazdinske Toplice,, Croatia 1 Spinal Cord Injury (SCI) to walk again
Mutual and asynchronous anticipation and action in sports as globally competitive
 1 Supplementary Materials Mutual and asynchronous anticipation and action in sports as globally competitive and locally coordinative dynamics Keisuke Fujii, Tadao Isaka, Motoki Kouzaki and Yuji Yamamoto.
1 Supplementary Materials Mutual and asynchronous anticipation and action in sports as globally competitive and locally coordinative dynamics Keisuke Fujii, Tadao Isaka, Motoki Kouzaki and Yuji Yamamoto.
Title: Golfer Specific Responses to Shaft Stiffness: Implications for Optimizing Loft during Driver Fitting
 1 1 2 3 Title: Golfer Specific Responses to Shaft Stiffness: Implications for Optimizing Loft during Driver Fitting 4 5 Running Title: Golfer Specific Responses to Shaft Stiffness 6 7 Authors: Sasho J.
1 1 2 3 Title: Golfer Specific Responses to Shaft Stiffness: Implications for Optimizing Loft during Driver Fitting 4 5 Running Title: Golfer Specific Responses to Shaft Stiffness 6 7 Authors: Sasho J.
In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007.
 Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING
 INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING Joseph P. Hunter 1, Robert N. Marshall 1,, and Peter J. McNair 3 1 Department of Sport and Exercise Science, The University of Auckland, Auckland,
INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING Joseph P. Hunter 1, Robert N. Marshall 1,, and Peter J. McNair 3 1 Department of Sport and Exercise Science, The University of Auckland, Auckland,
Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring
 , March 16-18, 2016, Hong Kong Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring Takashige Yano, Jae Hoon Lee, Member, IAENG and Shingo Okamoto 1 Abstract The purpose
, March 16-18, 2016, Hong Kong Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring Takashige Yano, Jae Hoon Lee, Member, IAENG and Shingo Okamoto 1 Abstract The purpose
Effects of foot-pedal interface rigidity on high frequency cycling acceleration. John Romanishin
 Thursday 14:00-17:00 Go forth final Paper Assignment Effects of foot-pedal interface rigidity on high frequency cycling acceleration John Romanishin 5/9/2011 2.671 Measurement and Instrumentation Professor
Thursday 14:00-17:00 Go forth final Paper Assignment Effects of foot-pedal interface rigidity on high frequency cycling acceleration John Romanishin 5/9/2011 2.671 Measurement and Instrumentation Professor