Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
|
|
|
- Buddy McCoy
- 6 years ago
- Views:
Transcription

1 Spring 2016 Locomotion Concepts Locomotion Concepts
2 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts
3 Locomotion Concepts Nature came up with a multitude of locomotion concepts Adaptation to environmental characteristics Adaptation to the perceived environment (e.g. size) Concepts found in nature Difficult to imitate technically Do not employ wheels Sometimes imitate wheels (bipedal walking) Most technical systems today use wheels or caterpillars Legged locomotion is still mostly a research topic Locomotion Concepts
4 Biped Walking Biped walking mechanism not too far from real rolling rolling of a polygon with side length equal to the length of the step the smaller the step gets, the more the polygon tends to a circle (wheel) But rotating joint was not invented by nature Work against gravity is required More detailed analysis follows later in this presentation Locomotion Concepts
5 Walking or rolling? number of actuators structural complexity control expense energy efficient terrain (flat ground, soft ground, climbing..) movement of the involved masses walking / running includes up and down movement of COG some extra losses Locomotion Concepts
6 Characterization of locomotion concept Locomotion physical interaction between the vehicle and its environment. Locomotion is concerned with interaction forces, and the mechanisms and actuators that generate them. The most important issues in locomotion are: stability number of contact points center of gravity static/dynamic stabilization inclination of terrain characteristics of contact contact point or contact area angle of contact friction type of environment structure medium (water, air, soft or hard ground) Locomotion Concepts
7 Why legged robots? Legged systems can overcome many obstacles But it is quite hard to achieve this since many DOFs must be controlled in a coordinated way the robot must see detailed elements of the terrain Locomotion Concepts


8 Legged Robotics Impressive Mobility ALoF The Quadruped Robot I ASL Autonomous Systems Lab Highly integrated leg design large range of leg motion allowing for complex maneuvers static walking Locomotion Concepts
9 A minimum of two DOF is required to move a leg forward a lift and a swing motion. Sliding-free motion in more than one direction not possible Three DOF for each leg in most cases (as pictured below) 4th DOF for the ankle joint might improve walking and stability additional joint (DOF) increases the complexity of the design and especially of the locomotion control. ASL Autonomous Systems Lab Number of Joints of Each Leg (DOF: degrees of freedom) Locomotion Concepts
10 The number of distinct event sequences (gaits) The gait is characterized as the distinct sequence of lift and release events of the individual legs it depends on the number of legs. the number of possible events N for a walking machine with k legs is: N 2k 1! For a biped walker (k=2) the number of possible events N is: 2 1! 3! N k For a robot with 6 legs (hexapod) N is already N 11! 39'916'800 Locomotion Concepts

11 Dynamic Walking vs. Static Walking Statically stable Dynamic walking CoG CoG Bodyweight supported by at least three legs Even if all joints freeze instantaneously, the robot will not fall Safe, slow and inefficient The robot will fall if not continuously moving Less than three legs can be in ground contact fast, efficient and demanding for actuation and control Locomotion Concepts

12 ASL Autonomous Systems Lab Legged Robotics Today Finally, a breakthrough? Most prominent example: Boston Dynamics Locomotion Concepts


13 Case Study: Passive Dynamic Walker Forward falling combined with passive leg swing Storage of energy: potential kinetic in combination with low friction C youtube material Locomotion Concepts
 C J. Braun, University of Edinburgh, UK Locomotion Concepts 01.03.")
14 Efficiency Comparison Efficiency = c mt = mech. energy / (weight x dist. traveled) C J. Braun, University of Edinburgh, UK Locomotion Concepts

15 ASL Autonomous Systems Lab Legged Robotics Today Finally, a breakthrough? Most prominent example: Boston Dynamics Locomotion Concepts


16 Towards Efficient Dynamic Walking: Optimizing Gaits C Structure and motion laboratory University of London Locomotion Concepts

17 Efficient Walking and Running serial elastic actuation ASL Autonomous Systems Lab Locomotion Concepts




18 StarlETH ein Laufroboter mit elastischen Gelenken ASL Autonomous Systems Lab Locomotion Concepts




19 ANYmal an electrically actuated dog for real-world scenarios High mobility to go where today only humans can go 10 kg of payload 2 h of continuous operations Prof. Marco Hutter Locomotion Concepts
20 Mobile Robots with Wheels Wheels are the most appropriate solution for most applications Three wheels are sufficient to guarantee stability With more than three wheels an appropriate suspension is required Selection of wheels depends on the application Locomotion Concepts
21 The Four Basic Wheels Types a) Standard wheel: Two degrees of freedom; rotation around the (motorized) wheel axle and the contact point b) Castor wheel: Three degrees of freedom; rotation around the wheel axle, the contact point and the castor axle Locomotion Concepts
22 The Four Basic Wheels Types c) Swedish wheel: Three degrees of freedom; rotation around the (motorized) wheel axle, around the rollers and around the contact point d) Ball or spherical wheel: Suspension technically not solved Locomotion Concepts
23 Characteristics of Wheeled Robots and Vehicles Stability of a vehicle is be guaranteed with 3 wheels If center of gravity is within the triangle which is formed by the ground contact point of the wheels. Stability is improved by 4 and more wheel however, this arrangements are hyper static and require a flexible suspension system. Bigger wheels allow to overcome higher obstacles but they require higher torque or reductions in the gear box. Most arrangements are non-holonomic (see chapter 3) require high control effort Combining actuation and steering on one wheel makes the design complex and adds additional errors for odometry. Locomotion Concepts


24 Different Arrangements of Wheels I Two wheels COG below axle Three wheels Omnidirectional Drive Synchro Drive Locomotion Concepts
25 Synchro Drive All wheels are actuated synchronously by one motor defines the speed of the vehicle All wheels steered synchronously by a second motor sets the heading of the vehicle The orientation in space of the robot frame will always remain the same It is therefore not possible to control the orientation of the robot frame. Locomotion Concepts
26 Different Arrangements of Wheels II Four wheels Six wheels Locomotion Concepts
 C Willow Garage Locomotion Concepts 01.03.")
27 Case Study: Willow Garage s PR2 Four powered castor wheels with active steering Results in omni-drive-like behaviour Results in simplified high-level planning (see chapter 6) C Willow Garage Locomotion Concepts

28 CMU Uranus: Omnidirectional Drive with 4 Wheels Movement in the plane has 3 DOF thus only three wheels can be independently controlled It might be better to arrange three swedish wheels in a triangle ASL Autonomous Systems Lab Locomotion Concepts
29 Wheeled Rovers: Concepts for Object Climbing Purely friction based Change of center of gravity (CoG) Adapted suspension mechanism with passive or active joints Locomotion Concepts



30 Climbing with Legs: Shrimp (ASL EPFL/ETH) Passive locomotion concept 6 wheels two boogies on each side fixed wheel in the rear front wheel with spring suspension Dimensions length: 60 cm height: 20 cm Characteristics highly stable in rough terrain overcomes obstacles up to 2 times its wheel diameter Locomotion Concepts
31 Flying «Locomotion» Forces acting on a profile with relative wind speed Lift force Drag force Moment Angle of attack Relative Wind Leading edge 25 % Chord M F l F d Chord length Chord Trailing edge Thickness Locomotion Concepts


32 UAV (Unmanned Aerial Vehicles) flight concepts Helicopters: < 20 minutes Highly dynamic and agility Fixed Wing Airplanes: > some hours; continuous flights possible Non-holonomic constraints Blimp: lighter-than-air > some hours (dependent on wind conditions); Sensitive to wind Large size (dependent on payload) Flapping wings < 20 minutes; gliding mode possible Non-holonomic constraints Very complex mechanics Festo BionicOpter Locomotion Concepts
 the tuna")



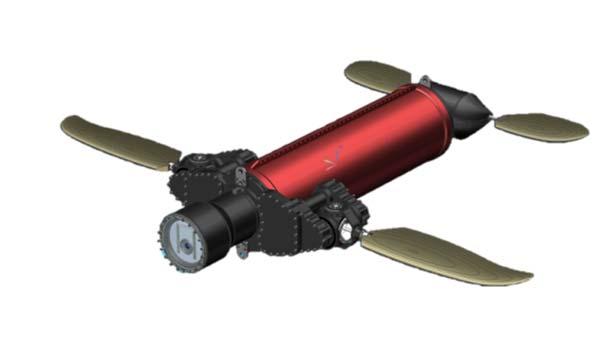
33 AUV (Autonomous Underwater Vehicles) designed by students Naro (2009) the tuna robot Taratuga (2012) the turtle robot Nanins (2013) the modular underwater robot Sepios (2014, with Disney) the Kalmar robot Locomotion Concepts
34 The end Locomotion Concepts
Locomotion Concepts. Autonomous Mobile Robots. Concepts Legged Locomotion Wheeled Locomotion. Autonomous Systems Lab. Zürich. Localization.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
This course will deal with Locomotion and Navigation that includes:
 1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Robotics (Locomotion) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics (Locomotion) Winter 1393 Bonab University Locomotion Movement or the ability to move Locomotion Locomotion mechanisms used in biological systems: -Successful in harsh environments -Inspired most
Robotics (Locomotion) Winter 1393 Bonab University Locomotion Movement or the ability to move Locomotion Locomotion mechanisms used in biological systems: -Successful in harsh environments -Inspired most
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Design and Modeling of a Mobile Robot
 Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
In this course you will learn the following
 Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Robot motion by simultaneously wheel and leg propulsion
 Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Aerodynamic Terms. Angle of attack is the angle between the relative wind and the wing chord line. [Figure 2-2] Leading edge. Upper camber.
![Aerodynamic Terms. Angle of attack is the angle between the relative wind and the wing chord line. [Figure 2-2] Leading edge. Upper camber.](/thumbs/82/86661300.jpg "Aerodynamic Terms. Angle of attack is the angle between the relative wind and the wing chord line. [Figure 2-2] Leading edge. Upper camber.") Chapters 2 and 3 of the Pilot s Handbook of Aeronautical Knowledge (FAA-H-8083-25) apply to powered parachutes and are a prerequisite to reading this book. This chapter will focus on the aerodynamic fundamentals
Chapters 2 and 3 of the Pilot s Handbook of Aeronautical Knowledge (FAA-H-8083-25) apply to powered parachutes and are a prerequisite to reading this book. This chapter will focus on the aerodynamic fundamentals
PERCEPTIVE ROBOT MOVING IN 3D WORLD. D.E- Okhotsimsky, A.K. Platonov USSR
 PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
Spider Robot for Motion with Quasistatic. Force Constraints
 Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Robots With Legs. Helge Wrede
 Robots With Legs Helge Wrede 27.11.2017 Outline Motivation Overview Properties Number of legs Balance Walking Basic Bipedal Implementation Dynamic Balancing Concepts 3D-LIPM 2 Motivation Figure: Side view
Robots With Legs Helge Wrede 27.11.2017 Outline Motivation Overview Properties Number of legs Balance Walking Basic Bipedal Implementation Dynamic Balancing Concepts 3D-LIPM 2 Motivation Figure: Side view
Mobile Robots (Legged) (Take class notes)
 (Take class notes)") Mobile Robots (Legged) (Take class notes) Legged mobile robots Mobile robots are robots which can move There are two types of mobile robots - Legged two, four, six and eight legs - Wheeled one, two, three
Mobile Robots (Legged) (Take class notes) Legged mobile robots Mobile robots are robots which can move There are two types of mobile robots - Legged two, four, six and eight legs - Wheeled one, two, three
Mecánica de Sistemas Multicuerpo:
 Universidad Pública de Navarra 12 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Mecánica de Sistemas Multicuerpo: Análisis de la Silla de Ruedas Triesférica y Dinámica
Universidad Pública de Navarra 12 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Mecánica de Sistemas Multicuerpo: Análisis de la Silla de Ruedas Triesférica y Dinámica
Create a road in your house
 2016.5.20 All cyclists should be able to enjoy sport cycling without regard for the place or time. We want cyclists to be able to ride as hard as they want indoors regardless of the weather or time of
2016.5.20 All cyclists should be able to enjoy sport cycling without regard for the place or time. We want cyclists to be able to ride as hard as they want indoors regardless of the weather or time of
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances
 First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING
 OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
Design of a double quadruped for the Tech United soccer robot
 Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Exploration Series. AIRPLANE Interactive Physics Simulation Page 01
 AIRPLANE ------- Interactive Physics Simulation ------- Page 01 What makes an airplane "stall"? An airplane changes its state of motion thanks to an imbalance in the four main forces acting on it: lift,
AIRPLANE ------- Interactive Physics Simulation ------- Page 01 What makes an airplane "stall"? An airplane changes its state of motion thanks to an imbalance in the four main forces acting on it: lift,
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots
 ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2
 Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Question: Bicycles. Observations About Bicycles. Static Stability, Part 1. Static Stability, Part 2. Static Stability, Part 3
 Bicycles 1 Bicycles 2 Question: Bicycles How would raising the height of a sport utility vehicle affect its turning stability? 1. Make it less likely to tip over. 2. Make it more likely to tip over. 3.
Bicycles 1 Bicycles 2 Question: Bicycles How would raising the height of a sport utility vehicle affect its turning stability? 1. Make it less likely to tip over. 2. Make it more likely to tip over. 3.
Locomotion. Dr. Kurtuluş Erinç Akdoğan.
 Locomotion Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION A mobile robot needs locomotion mechanisms that enable it to move unbounded throughout its environment. Locomotion is an
Locomotion Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION A mobile robot needs locomotion mechanisms that enable it to move unbounded throughout its environment. Locomotion is an
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
CHAPTER 9 PROPELLERS
 CHAPTER 9 CHAPTER 9 PROPELLERS CONTENTS PAGE How Lift is Generated 02 Helix Angle 04 Blade Angle of Attack and Helix Angle Changes 06 Variable Blade Angle Mechanism 08 Blade Angles 10 Blade Twist 12 PROPELLERS
CHAPTER 9 CHAPTER 9 PROPELLERS CONTENTS PAGE How Lift is Generated 02 Helix Angle 04 Blade Angle of Attack and Helix Angle Changes 06 Variable Blade Angle Mechanism 08 Blade Angles 10 Blade Twist 12 PROPELLERS
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
TEN YEARS IN LOCOMOTION CONTROL RESEARCH
 TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
BIPED TRANSFORMER. Group No. 9
 BIPED TRANSFORMER Group No. 9 Name Roll Number Aditya Vikram Singh 11010305 Dhiraj Gandhi 11010321 Jagjeet Singh 11010326 Mayank Sanghani 11010336 Sriram Kumar 11010365 Vikas Singh 11010371 Abstract: This
BIPED TRANSFORMER Group No. 9 Name Roll Number Aditya Vikram Singh 11010305 Dhiraj Gandhi 11010321 Jagjeet Singh 11010326 Mayank Sanghani 11010336 Sriram Kumar 11010365 Vikas Singh 11010371 Abstract: This
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Truba college of Engineering & Technology, Indore, India. Truba college of Engineering & Technology, Indore, India.
 IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY DESIGN AND DEVELOPMENT OF WALKING BIPEDAL ROBOT WITH THE HELP OF ARDUINO CONTROLLER Deepti Malviya*, Suman Sharma * Truba college
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY DESIGN AND DEVELOPMENT OF WALKING BIPEDAL ROBOT WITH THE HELP OF ARDUINO CONTROLLER Deepti Malviya*, Suman Sharma * Truba college
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
Figure 1 Figure 1 shows the involved forces that must be taken into consideration for rudder design. Among the most widely known profiles, the most su
 THE RUDDER starting from the requirements supplied by the customer, the designer must obtain the rudder's characteristics that satisfy such requirements. Subsequently, from such characteristics he must
THE RUDDER starting from the requirements supplied by the customer, the designer must obtain the rudder's characteristics that satisfy such requirements. Subsequently, from such characteristics he must
Body Stabilization of PDW toward Humanoid Walking
 Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Keywords--Bio-Robots, Walking Robots, Locomotion and Stability Controlled Gait.
 Six Legged Locomotion on Uneven Terrain Kale Aparna S., Salunke Geeta D. kaleaparna5@gmail.com, geetasalunke@gmail.com Abstract -In this paper current state of many walking robots are compared and advantages
Six Legged Locomotion on Uneven Terrain Kale Aparna S., Salunke Geeta D. kaleaparna5@gmail.com, geetasalunke@gmail.com Abstract -In this paper current state of many walking robots are compared and advantages
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud. Hydraulically Actuated Hexapod Robots. Design, Implementation. and Control.
 Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Journal of Chemical and Pharmaceutical Research, 2016, 8(6): Research Article. Walking Robot Stability Based on Inverted Pendulum Model
: Research Article. Walking Robot Stability Based on Inverted Pendulum Model") Available online www.jocpr.com Journal of Chemical and Pharmaceutical Research, 2016, 8(6):463-467 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Walking Robot Stability Based on Inverted Pendulum
Available online www.jocpr.com Journal of Chemical and Pharmaceutical Research, 2016, 8(6):463-467 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Walking Robot Stability Based on Inverted Pendulum
Simulation of the Hybtor Robot
 Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
ScienceDirect. Investigation of the aerodynamic characteristics of an aerofoil shaped fuselage UAV model
 Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 90 (2014 ) 225 231 10th International Conference on Mechanical Engineering, ICME 2013 Investigation of the aerodynamic characteristics
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 90 (2014 ) 225 231 10th International Conference on Mechanical Engineering, ICME 2013 Investigation of the aerodynamic characteristics
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
DEVELOPMENT OF A FULL-SIZED BIPEDAL HUMANOID ROBOT UTILIZING SPRING ASSISTED PARALLEL FOUR-BAR LINKAGES WITH SYNCHRONIZED ACTUATION
 Proceedings of the ASME 2011 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2011 August 28-31, 2011, Washington, DC, USA DETC2011-4
Proceedings of the ASME 2011 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2011 August 28-31, 2011, Washington, DC, USA DETC2011-4
Walking and Running BACKGROUND REVIEW. Planar Pendulum. BIO-39 October 30, From Oct. 25, Equation of motion (for small θ) Solution is
 Solution is") Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
-Elastic strain energy (duty factor decreases at higher speeds). Higher forces act on feet. More tendon stretch. More energy stored in tendon.
. Higher forces act on feet. More tendon stretch. More energy stored in tendon.") As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
Aerodynamics Principles
 Aerodynamics Principles Stage 1 Ground Lesson 3 Chapter 3 / Pages 2-18 3:00 Hrs Harold E. Calderon AGI, CFI, CFII, and MEI Lesson Objectives Become familiar with the four forces of flight, aerodynamic
Aerodynamics Principles Stage 1 Ground Lesson 3 Chapter 3 / Pages 2-18 3:00 Hrs Harold E. Calderon AGI, CFI, CFII, and MEI Lesson Objectives Become familiar with the four forces of flight, aerodynamic
Question: Bicycles. Vehicle s Static Stability, Part 1. Observations About Bicycles. Vehicle s Static Stability, Part 2
 Bicycles 1 Bicycles 2 Question: Bicycles How would raising the height of a small pickup truck affect its turning stability? 1. Make it less likely to tip over. 2. Make it more likely to tip over. 3. Have
Bicycles 1 Bicycles 2 Question: Bicycles How would raising the height of a small pickup truck affect its turning stability? 1. Make it less likely to tip over. 2. Make it more likely to tip over. 3. Have
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Aircraft Design Prof. A.K Ghosh Department of Aerospace Engineering Indian Institute of Technology, Kanpur
 Aircraft Design Prof. A.K Ghosh Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 12 Design Considerations: Aerofoil Selection Good morning friends. The last lecture
Aircraft Design Prof. A.K Ghosh Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 12 Design Considerations: Aerofoil Selection Good morning friends. The last lecture
BASIC AIRCRAFT STRUCTURES
 Slide 1 BASIC AIRCRAFT STRUCTURES The basic aircraft structure serves multiple purposes. Such as aircraft aerodynamics; which indicates how smooth the aircraft flies thru the air (The Skelton of the aircraft
Slide 1 BASIC AIRCRAFT STRUCTURES The basic aircraft structure serves multiple purposes. Such as aircraft aerodynamics; which indicates how smooth the aircraft flies thru the air (The Skelton of the aircraft
Stability and Flight Controls
 Stability and Flight Controls Three Axes of Flight Longitudinal (green) Nose to tail Lateral (blue) Wing tip to Wing tip Vertical (red) Top to bottom Arm Moment Force Controls The Flight Controls Pitch
Stability and Flight Controls Three Axes of Flight Longitudinal (green) Nose to tail Lateral (blue) Wing tip to Wing tip Vertical (red) Top to bottom Arm Moment Force Controls The Flight Controls Pitch
Path-Planning and Tracking in a 3D Complex Environment for an Anthropomorphic Biped Robot
 Path-Planning and Tracking in a 3D Complex Environment for an Anthropomorphic Biped Robot Jean-Matthieu Bourgeot 1, Nathalie Cislo 2, Bernard Espiau 1 1 INRIA Rhône-Alpes, BIP Project, Montbonnot, France.
Path-Planning and Tracking in a 3D Complex Environment for an Anthropomorphic Biped Robot Jean-Matthieu Bourgeot 1, Nathalie Cislo 2, Bernard Espiau 1 1 INRIA Rhône-Alpes, BIP Project, Montbonnot, France.
Preliminary Design Review (PDR) Aerodynamics #2 AAE-451 Aircraft Design
 Aerodynamics #2 AAE-451 Aircraft Design") Preliminary Design Review (PDR) Aerodynamics #2 AAE-451 Aircraft Design Aircraft Geometry (highlight any significant revisions since Aerodynamics PDR #1) Airfoil section for wing, vertical and horizontal
Preliminary Design Review (PDR) Aerodynamics #2 AAE-451 Aircraft Design Aircraft Geometry (highlight any significant revisions since Aerodynamics PDR #1) Airfoil section for wing, vertical and horizontal
The Incremental Evolution of Gaits for Hexapod Robots
 The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
Aircraft Stability and Performance 2nd Year, Aerospace Engineering. Dr. M. Turner
 Aircraft Stability and Performance 2nd Year, Aerospace Engineering Dr. M. Turner Basic Info Timetable 15.00-16.00 Monday Physics LTA 16.00-17.00 Monday Physics LTA Exam 2 1 2 hour exam 6 questions 2 from
Aircraft Stability and Performance 2nd Year, Aerospace Engineering Dr. M. Turner Basic Info Timetable 15.00-16.00 Monday Physics LTA 16.00-17.00 Monday Physics LTA Exam 2 1 2 hour exam 6 questions 2 from
Skippy: Reaching for the Performance Envelope
 Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Modeling Human Movement
 CS 4732: Computer Animation Modeling Human Movement Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Modeling Human Movement: It s Hard!
CS 4732: Computer Animation Modeling Human Movement Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Modeling Human Movement: It s Hard!
Mechanical Advantage 1
 Mechanical Advantage 1 Mechanical Advantage Another Word for Leverage Ways of Making WORK easier or more efficient. 2 Work = Work * = Work = * * * 3 Mechanical Advantage Output Input 5 8 N = 1 4 5 8 N
Mechanical Advantage 1 Mechanical Advantage Another Word for Leverage Ways of Making WORK easier or more efficient. 2 Work = Work * = Work = * * * 3 Mechanical Advantage Output Input 5 8 N = 1 4 5 8 N
Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and its step climbing strategy
 Munakata and Wada ROBOMECH Journal (2015) 2:7 DOI 10.1186/s40648-015-0028-9 RESEARCH ARTICLE Open Access Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and
Munakata and Wada ROBOMECH Journal (2015) 2:7 DOI 10.1186/s40648-015-0028-9 RESEARCH ARTICLE Open Access Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and
DISCOVER NEW OPTIONS THE NEW GENERATION X
 DISCOVER NEW OPTIONS THE NEW GENERATION X MULTIFUNCTIONAL ALL MOUNTAIN FRAME CONCEPT 3 VERSIONS: CARBON ALUMINIUM EMTB 3 WHEEL SIZES WITH TYRE WIDTH UP TO 3.00 IN 1 FRAME: TRAIL: 27.5 WHEELS TRACTION:
DISCOVER NEW OPTIONS THE NEW GENERATION X MULTIFUNCTIONAL ALL MOUNTAIN FRAME CONCEPT 3 VERSIONS: CARBON ALUMINIUM EMTB 3 WHEEL SIZES WITH TYRE WIDTH UP TO 3.00 IN 1 FRAME: TRAIL: 27.5 WHEELS TRACTION:
Each copy of any part of a JSTOR transmission must contain the same copyright notice that appears on the screen or printed page of such transmission.
 Walking and Running Author(s): R. McNeill Alexander Source: The Mathematical Gazette, Vol. 80, No. 488 (Jul., 1996), pp. 262-266 Published by: The Mathematical Association Stable URL: http://www.jstor.org/stable/3619558
Walking and Running Author(s): R. McNeill Alexander Source: The Mathematical Gazette, Vol. 80, No. 488 (Jul., 1996), pp. 262-266 Published by: The Mathematical Association Stable URL: http://www.jstor.org/stable/3619558
Microprocessor Technology in Ankle Prosthetics
 Microprocessor Technology in Ankle Prosthetics Arizona State University Dr. Thomas Sugar Former Students LTC Joseph Hitt, PhD Dr. Kevin Hollander Dr. Matthew Holgate Dr. Jeffrey Ward Mr. Alex Boehler Mr.
Microprocessor Technology in Ankle Prosthetics Arizona State University Dr. Thomas Sugar Former Students LTC Joseph Hitt, PhD Dr. Kevin Hollander Dr. Matthew Holgate Dr. Jeffrey Ward Mr. Alex Boehler Mr.
Related Careers: Aircraft Instrument Repairer Aircraft Designer Aircraft Engineer Aircraft Electronics Specialist Aircraft Mechanic Pilot US Military
 Airplane Design and Flight Fascination with Flight Objective: 1. You will be able to define the basic terms related to airplane flight. 2. You will test fly your airplane and make adjustments to improve
Airplane Design and Flight Fascination with Flight Objective: 1. You will be able to define the basic terms related to airplane flight. 2. You will test fly your airplane and make adjustments to improve
WATER ROCK. Lawndart The rocket goes straight up and comes down nose first at high speed. Disadvantages
 Water Rocket Recovery Index What is a recovery system? A recovery system is a feature of a rocket that allows it to come back to Earth with minimal damage. Introduction This guide is intended to serve
Water Rocket Recovery Index What is a recovery system? A recovery system is a feature of a rocket that allows it to come back to Earth with minimal damage. Introduction This guide is intended to serve
WONDERLAB: THE EQUINOR GALLERY. The science and maths behind the exhibits 30 MIN INFORMATION. Topic FORCES. Age
 WONDERLAB: THE EQUINOR GALLERY and maths s INFORMATION Age 7 11 11 14 Topic FORCES 30 MIN Location LEVEL 3, SCIENCE MUSEUM, LONDON What s the science? What more will you wonder? and maths s Wonderlab:
WONDERLAB: THE EQUINOR GALLERY and maths s INFORMATION Age 7 11 11 14 Topic FORCES 30 MIN Location LEVEL 3, SCIENCE MUSEUM, LONDON What s the science? What more will you wonder? and maths s Wonderlab:
Section Instructor: Dr. Grant Kruger
 MABEL Robotic Foot Design Final Report ME 450 Fall 2010 Team 19 Matt Byrne Shane Larkin Allison Ryan Philip Vanderwall Section Instructor: Dr. Grant Kruger 1 TABLE OF CONTENTS 1. ABSTRACT... 4 2. EXECUTIVE
MABEL Robotic Foot Design Final Report ME 450 Fall 2010 Team 19 Matt Byrne Shane Larkin Allison Ryan Philip Vanderwall Section Instructor: Dr. Grant Kruger 1 TABLE OF CONTENTS 1. ABSTRACT... 4 2. EXECUTIVE
Design of Human Powered Forklift
 Design of Human Powered Forklift Rahul Toraskar 1, Onkar Vangutte 2, Onkar Patil 3 Department of Mechanical Engineering Bharati Vidyapeeth s College Of Engineering Kolhapur. Shivaji University, kolhapur.
Design of Human Powered Forklift Rahul Toraskar 1, Onkar Vangutte 2, Onkar Patil 3 Department of Mechanical Engineering Bharati Vidyapeeth s College Of Engineering Kolhapur. Shivaji University, kolhapur.
First Flight Glossary
 First Flight Glossary (for secondary grades) aeronautics The study of flight and the science of building and operating an aircraft. aircraft A machine used for flying. Airplanes, helicopters, blimps and
First Flight Glossary (for secondary grades) aeronautics The study of flight and the science of building and operating an aircraft. aircraft A machine used for flying. Airplanes, helicopters, blimps and
Book Review. I. Background
 Book Review 1 Delft Pneumatic Bipeds by Martijn Wisse and Richard Q. van der Linde, Springer Tracts in Advanced Robotics, Vol. 34, 2007, ISBN 978-3-540-72807-8, 136 pages, US$109, Reviewed by J.W. Grizzle
Book Review 1 Delft Pneumatic Bipeds by Martijn Wisse and Richard Q. van der Linde, Springer Tracts in Advanced Robotics, Vol. 34, 2007, ISBN 978-3-540-72807-8, 136 pages, US$109, Reviewed by J.W. Grizzle
A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY
 Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Basics, Types, Use and Applications
 Basics, Types, Use and Applications 2015 by Brilliant Classes 2015 by Brilliant Classes Science : Physics Unit : Friction Friction : Basics, Types, Use and Applications The following topics are included
Basics, Types, Use and Applications 2015 by Brilliant Classes 2015 by Brilliant Classes Science : Physics Unit : Friction Friction : Basics, Types, Use and Applications The following topics are included
First Hops of the 3D Bow Leg
 First Hops of the 3D Bow Leg Garth Zeglin and H. Benjamin Brown, Jr. Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213, USA ABSTRACT We have constructed several hopping machines using
First Hops of the 3D Bow Leg Garth Zeglin and H. Benjamin Brown, Jr. Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213, USA ABSTRACT We have constructed several hopping machines using
Anemometry. Anemometry. Wind Conventions and Characteristics. Anemometry. Wind Variability. Anemometry. Function of an anemometer:
 Anemometry Anemometry Function of an anemometer: Measure some or all of the components of the wind vector In homogeneous terrain, vertical component is small express wind as -D horizontal vector For some
Anemometry Anemometry Function of an anemometer: Measure some or all of the components of the wind vector In homogeneous terrain, vertical component is small express wind as -D horizontal vector For some
DESIGN & MANUFACTURING OF ROBOT BY USING KLANN S MECHANISM
 DESIGN & MANUFACTURING OF ROBOT BY USING KLANN S MECHANISM Prof. S. S. Shevale 1 Shashank Kulkarni 2, Atharva Kulkarni 3, Manoj Bagal 4, Rushikesh Bhosale 5 1 Asst. Prof. Department of Mechanical Engineering,
DESIGN & MANUFACTURING OF ROBOT BY USING KLANN S MECHANISM Prof. S. S. Shevale 1 Shashank Kulkarni 2, Atharva Kulkarni 3, Manoj Bagal 4, Rushikesh Bhosale 5 1 Asst. Prof. Department of Mechanical Engineering,
Computer Simulation of Semi-Passive Walking Robot with Four Legs and Verification of It s Validity Using Developed Experimental Robot
 Computer Simulation of Semi-Passive Walking Root with Four Legs and Verification of It s Validit Using Developed Experimental Root Hiroki Ia, Shingo Okamoto, and Jae Hoon Lee, Memer, IAENG Astract This
Computer Simulation of Semi-Passive Walking Root with Four Legs and Verification of It s Validit Using Developed Experimental Root Hiroki Ia, Shingo Okamoto, and Jae Hoon Lee, Memer, IAENG Astract This
Aircraft Stability and Control Prof. A.K.Ghosh Department of Aerospace Engineering Indian Institute of Technology-Kanpur. Lecture-01 Introduction
 Aircraft Stability and Control Prof. A.K.Ghosh Department of Aerospace Engineering Indian Institute of Technology-Kanpur Lecture-01 Introduction Wish you all very, very happy New Year. We are on the tarmac
Aircraft Stability and Control Prof. A.K.Ghosh Department of Aerospace Engineering Indian Institute of Technology-Kanpur Lecture-01 Introduction Wish you all very, very happy New Year. We are on the tarmac
WHAT IS GLIDER? A light engineless aircraft designed to glide after being towed aloft or launched from a catapult.
 GLIDER BASICS WHAT IS GLIDER? A light engineless aircraft designed to glide after being towed aloft or launched from a catapult. 2 PARTS OF GLIDER A glider can be divided into three main parts: a)fuselage
GLIDER BASICS WHAT IS GLIDER? A light engineless aircraft designed to glide after being towed aloft or launched from a catapult. 2 PARTS OF GLIDER A glider can be divided into three main parts: a)fuselage
Improved Aerodynamic Characteristics of Aerofoil Shaped Fuselage than that of the Conventional Cylindrical Shaped Fuselage
 International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-213 1 Improved Aerodynamic Characteristics of Aerofoil Shaped Fuselage than that of the Conventional Cylindrical Shaped
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-213 1 Improved Aerodynamic Characteristics of Aerofoil Shaped Fuselage than that of the Conventional Cylindrical Shaped
COURSE OBJECTIVES CHAPTER 9
 COURSE OBJECTIVES CHAPTER 9 9. SHIP MANEUVERABILITY 1. Be qualitatively familiar with the 3 broad requirements for ship maneuverability: a. Controls fixed straightline stability b. Response c. Slow speed
COURSE OBJECTIVES CHAPTER 9 9. SHIP MANEUVERABILITY 1. Be qualitatively familiar with the 3 broad requirements for ship maneuverability: a. Controls fixed straightline stability b. Response c. Slow speed
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane
 Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Designing a Model Rocket
 Designing a Model Rocket Design Components In the following pages we are going to look at the design requirements for a stable single stage model rocket. From the diagram here you can see that the rocket
Designing a Model Rocket Design Components In the following pages we are going to look at the design requirements for a stable single stage model rocket. From the diagram here you can see that the rocket
In parallel with steady gains in battery energy and power density, the coming generation of uninhabited aerial vehicles (UAVs) will enjoy increased
 will enjoy increased") In parallel with steady gains in battery energy and power density, the coming generation of uninhabited aerial vehicles (UAVs) will enjoy increased range, endurance, and operational capability by exploiting
In parallel with steady gains in battery energy and power density, the coming generation of uninhabited aerial vehicles (UAVs) will enjoy increased range, endurance, and operational capability by exploiting
Servo-Assisted Lower-Body Exoskeleton With a True Running Gait
 Servo-Assisted Lower-Body Exoskeleton With a True Running Gait John Dick and Bruce Crapuchettes Applied Motion, Inc. 935 N. Indian Hill Blvd. Claremont, CA 91711 jdick@springwalker.com DARPA Workshop on
Servo-Assisted Lower-Body Exoskeleton With a True Running Gait John Dick and Bruce Crapuchettes Applied Motion, Inc. 935 N. Indian Hill Blvd. Claremont, CA 91711 jdick@springwalker.com DARPA Workshop on
XI.C. Power-Off Stalls
 References: FAA-H-8083-3; POH/AFM Objectives Key Elements Elements Schedule Equipment IP s Actions SP s Actions Completion Standards The student should develop knowledge of stalls regarding aerodynamics,
References: FAA-H-8083-3; POH/AFM Objectives Key Elements Elements Schedule Equipment IP s Actions SP s Actions Completion Standards The student should develop knowledge of stalls regarding aerodynamics,
Jurassic Chicken: An Avian Bipedal Robot 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, FAMU-FSU College of Engineering
 Jurassic Chicken: An Avian Bipedal Robot 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, FAMU-FSU College of Engineering Megan Grimm Machine Intelligence Lab (MIL) Email: megan@mil.ufl.edu
Jurassic Chicken: An Avian Bipedal Robot 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, FAMU-FSU College of Engineering Megan Grimm Machine Intelligence Lab (MIL) Email: megan@mil.ufl.edu
AIRCRAFT PRIMARY CONTROLS A I R C R A F T G E N E R A L K N O W L E D G E
 1.02.02 AIRCRAFT PRIMARY CONTROLS 1. 0 2 A I R C R A F T G E N E R A L K N O W L E D G E CONTROLLING AIRCRAFT AIRCRAFT CONTROL SYSTEM In general, we use control inputs of the following devices in cabin:
1.02.02 AIRCRAFT PRIMARY CONTROLS 1. 0 2 A I R C R A F T G E N E R A L K N O W L E D G E CONTROLLING AIRCRAFT AIRCRAFT CONTROL SYSTEM In general, we use control inputs of the following devices in cabin:
Planar motion hexapod walking machines: a new configuration
 Planar motion hexapod walking machines: a new configuration G. Genta and N. Amati Politecnico di Torino, Dipartimento di Meccanica ABSTRACT The present paper develops a new configuration for walking machines
Planar motion hexapod walking machines: a new configuration G. Genta and N. Amati Politecnico di Torino, Dipartimento di Meccanica ABSTRACT The present paper develops a new configuration for walking machines
PHYSICS REVIEW SHEET 2010 MID-TERM EXAM
 PHYSICS REVIEW SHEET 2010 MID-TERM EXAM Concepts And Definitions Definitions of fact, hypothesis, law, theory Explain the scientific method Difference between average and instantaneous speed and speed
PHYSICS REVIEW SHEET 2010 MID-TERM EXAM Concepts And Definitions Definitions of fact, hypothesis, law, theory Explain the scientific method Difference between average and instantaneous speed and speed
Big News! Dick Kline Inventor of the KF AirFoil Contacts rcfoamfighters.
 Big News! Dick Kline Inventor of the KF AirFoil Contacts rcfoamfighters. (Copy of Email from Dick Kline to rcfoamfighters on 3/28/09) --------------------------------------------------------------------------------
Big News! Dick Kline Inventor of the KF AirFoil Contacts rcfoamfighters. (Copy of Email from Dick Kline to rcfoamfighters on 3/28/09) --------------------------------------------------------------------------------
Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities.
 Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities. Background & Research Question There are many different styles and categories when
Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities. Background & Research Question There are many different styles and categories when
Stability & Control Aspects of UCAV Configurations
 Stability & Control Aspects of UCAV Configurations Paul Flux Senior Aerodynamicist BAE SYSTEMS Air Programmes Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Stability & Control Aspects of UCAV Configurations Paul Flux Senior Aerodynamicist BAE SYSTEMS Air Programmes Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Testing of hull drag for a sailboat
 Testing of hull drag for a sailboat Final report For Autonomous Sailboat Project In Professor Ruina s Locomotion and Robotics Lab, Cornell Jian Huang jh2524@cornell.edu Mechanical Engineering, MEng student
Testing of hull drag for a sailboat Final report For Autonomous Sailboat Project In Professor Ruina s Locomotion and Robotics Lab, Cornell Jian Huang jh2524@cornell.edu Mechanical Engineering, MEng student
Written Report of Robot Design
 Written Report of Robot Design Name: Robot Name: Course: Shaojie Ge Four Leg Walking Robot EEL 4665/5666 Intelligent Machines Design Laboratory Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs:
Written Report of Robot Design Name: Robot Name: Course: Shaojie Ge Four Leg Walking Robot EEL 4665/5666 Intelligent Machines Design Laboratory Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs:
DATA EQUATIONS MATH ANSWER
 HCP PHYSICS REVIEW SHEET MID TERM EXAM Concepts And Definitions 1. Definitions of fact, hypothesis, law, theory 2. Explain the scientific method 3. Difference between average and instantaneous speed and
HCP PHYSICS REVIEW SHEET MID TERM EXAM Concepts And Definitions 1. Definitions of fact, hypothesis, law, theory 2. Explain the scientific method 3. Difference between average and instantaneous speed and
A103 AERODYNAMIC PRINCIPLES
 A103 AERODYNAMIC PRINCIPLES References: FAA-H-8083-25A, Pilot s Handbook of Aeronautical Knowledge, Chapter 3 (pgs 4-10) and Chapter 4 (pgs 1-39) OBJECTIVE: Students will understand the fundamental aerodynamic
A103 AERODYNAMIC PRINCIPLES References: FAA-H-8083-25A, Pilot s Handbook of Aeronautical Knowledge, Chapter 3 (pgs 4-10) and Chapter 4 (pgs 1-39) OBJECTIVE: Students will understand the fundamental aerodynamic
Human Pose Tracking III: Dynamics. David Fleet University of Toronto
 Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped