Contents. Sensor-Driven Neural Control for Omnidirectional Locomotion and Versatile Reactive Behaviors of Walking Machines.
|
|
|
- Mercy Andrews
- 6 years ago
- Views:
Transcription
 control Neural preprocessing of sensory signals Sensor-driven")
!")
![! 113 years ago Biomimetic control approach (reflex and ) from walking animals to walking machines Cruse s model (6 legs)[14]](/docs-images/72/66917554/images/1-2.jpg "Beer s model (6 legs) [15] Kimura s model (4 legs)[16] Construction: engineering design, biomimetic robots [2] One leg Two")

 [1] Lucas, E. Huitieme recreation-la machine a marcher. Retreat. Math. 4 (1894), 198-204. [2] http://www.")
1 Contents Sensor-Driven Neural Control for Omnidirectional Locomotion and Versatile Reactive Behaviors of Walking Machines Poramate Manoonpong Introduction Modular neural (locomotion) control Neural preprocessing of sensory signals Sensor-driven behaviors Conclusion A brief overview of walking machine paradigms: The idea of walking machines is not new; there has already been, in France, forty odd patents for such applications (Lucas 1894 [1])!! 113 years ago Biomimetic control approach (reflex and ) from walking animals to walking machines Cruse s model (6 legs)[14] Beer s model (6 legs) [15] Kimura s model (4 legs)[16] Construction: engineering design, biomimetic robots [2] One leg Two legs Three legs Four legs Six legs Etc. [12] [10] [8] [3] [7] [6] [4] [5] Control: locomotion control, behavior control [9] [11] [13] -Engineering control approach (Forward/inverse kinematics (dynamics)) -Biomimetic control approach: reflex, central pattern generators (), high level (brain) [1] Lucas, E. Huitieme recreation-la machine a marcher. Retreat. Math. 4 (1894), [2] Reflexive No CPG(s) Bueschges model (single leg control for 6 legs) [17] Spenneberg & Kirchner s model (8 legs) [18] Modular neural control 1


")


2 Modular neural control for omnidirectional walking and a self-protective reflex Modular neural I3 I1 I2 Motor neurons Neural modeling The activation function for rhythmic movements Central pattern generator (CPG) Neural processor : 2-neuron [Pasemann et al., 2003 [19]] Where : B1, B2 = 0.01 The transfer function First approach: CPG for basic walking First approach: CPG for basic walking [Fischer et al., 2004 [20]] 2

![= sensory signal [1, -1] =, Second](/docs-images/72/66917554/images/3-2.jpg "approach: CPG + VRNs = forward, backward,")

![, [22]] Neural processor : Multiplication](/docs-images/72/66917554/images/3-4.jpg "[Fischer 2004 [21]] Where : B = -2.")




3 (VRN) for spot turning Input signals : Input X = the oscillating signal Input Y = sensory signal [1, -1] =, Second approach: CPG + VRNs = forward, backward, turning left and right, and marching movements [Manoonpong et al., [22]] Neural processor : Multiplication [Fischer 2004 [21]] Where : B = (PSN) for lateral motions Third approach: CPG + VRNs + PSN = omnidirectional locomotion control Input signal : I3 Neural processor : the hand-designed feedforward * *Thank Martin Hülse for his technical advise. Neural Parameters for Generating Different Walking Patterns Plot of the input space (,(, ) I FL, FR CL, CR TL, TR At least 12 actions!! CR TR FR 3






4 TL CL FL antiphase in phase The TC- and CTr-joints are in phase = forward The FTi-joints of left lead the CTr-joints of left by /2 = LaR, and vice versa for the right side Neural preprocessing of sensory signals for sensor-driven control 4




")


)")
) IR")


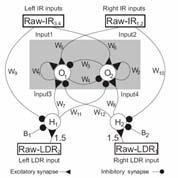
5 Sensor Driven Neural Control Neural preprocessing of a reflex signal (self-protective reflex behavior) Neural preprocessing of a speed control signal (escape behavior) Neural preprocessing of the walking pattern control signals (obstacle avoidance behavior (negative)) Neural preprocessing of the walking pattern control signals (phototropism (positive)) Neural preprocessing of IR and LDR signals Neural preprocessing of IR and LDR signals (obstacle avoidance and phototropism) 5
 method = a tool for")
, 198-204. [2] http://www.")
![walking-machines.org/ [3] Raibert, M. H., Brown, H. B., Jr., Chepponis, M. 1984. Experiments in balance with a 3D one-legged hopping machine. International J. Robotics Research\/ 3:75--92.](/docs-images/72/66917554/images/6-2.jpg "[4] Seyfarth A, Geyer H, Lipfert S, Rummel J, Minekawa Y, Iida F Running and walking with compliant legs Fast Motions in Biomechanics and Robotics - Optimization and Feedback Control Springer Verlag,")
![Berlin Heidelberg: 383-402. 2006 [5] Vanderborght B., Verrelst B., Van Ham R., Van Damme M., Lefeber D., Meira Y Duran B. & Beyl P.](/docs-images/72/66917554/images/6-3.jpg "Exploiting natural dynamics to reduce energy consumption by controlling the compliance of soft actuators The International Journal of Robotics Research (IJRR), Volume 25 Issue 4, april 2006, pp.")
![343-358 [6] http://www.proaut.uni-mannheim.de:8080/proaut/content/e74/e160/e197/index_eng.html [7] http://www.3me.tudelft.nl/live/pagina.jsp?](/docs-images/72/66917554/images/6-4.jpg "id=5b9fa39f-e096-4c70-bc04-1dab620865ff&lang=en [8] Hiroshi Kimura, Yasuhiro Fukuoka, Hiroki Katabuti, Mechanical Design of a Quadruped \"Tekken3 & 4\" and Navigation System Using Laser Range Sensor,")
6 Sensor-driven behaviors: Reflex, Escape, Obstacle avoidance and phototropism behaviors Conclusion Sensors Neural preprocessors Perception Inputs Modular neural controller Actuators I1 I2 I3 CPG PNS VRNs Action Environment Chaos control for different walking gaits [23] Biologically inspired sensor-driven walking behaviors Chaotic 2 neuron module Schmelcher and Diakonos (SD) method = a tool for the gobal detection of UPOs of a desired period in a chaotic system References: Acknowledgments Prof. Dr. rer. nat. Frank Pasemann Dr. Joern Fischer Dr. Martin Huelse Manfred Hild Keyan Zahedi Bjoern Mahn Steffen Wischmann Arndt von Twickel [1] Lucas, E. Huitieme recreation-la machine a marcher. Retreat. Math. 4 (1894), [2] [3] Raibert, M. H., Brown, H. B., Jr., Chepponis, M Experiments in balance with a 3D one-legged hopping machine. International J. Robotics Research\/ 3: [4] Seyfarth A, Geyer H, Lipfert S, Rummel J, Minekawa Y, Iida F Running and walking with compliant legs Fast Motions in Biomechanics and Robotics - Optimization and Feedback Control Springer Verlag, Berlin Heidelberg: [5] Vanderborght B., Verrelst B., Van Ham R., Van Damme M., Lefeber D., Meira Y Duran B. & Beyl P. Exploiting natural dynamics to reduce energy consumption by controlling the compliance of soft actuators The International Journal of Robotics Research (IJRR), Volume 25 Issue 4, april 2006, pp [6] [7] [8] Hiroshi Kimura, Yasuhiro Fukuoka, Hiroki Katabuti, Mechanical Design of a Quadruped "Tekken3 & 4" and Navigation System Using Laser Range Sensor, Proc. of Int. Symp. on Robotics (ISR2005), TU3H6, Tokyo, [9] A.J. Ijspeert, A. Crespi, D. Ryczko, and J.M. Cabelguen. From swimming to walking with a salamander robot driven by a spinal cord model. Science, 9 March 2007, Vol no. 5817, pp , [10] Kingsley, D. A., Quinn, R. D., Ritzmann, R. E., "A Cockroach Inspired Robot With Artificial Muscles" International Symposium on Adaptive Motion of Animals and Machines (AMAM 2003), Kyoto, Japan [11] Yusuke OTA, Yoshihiko INAGAKI, Kan YONEDA, Shigeo HIROSE; "Research on a Six-Legged Walking Robot with Parallel Mechanism", Proc. of the IROS 98, pp (1998) [12] "Fast and Robust: Hexapedal Robots via Shape Deposition Manufacturing, " Cham, J. G., Bailey, S. A., Clark, J. E., Full, R. J. and Cutkosky, M. R., The International Journal of Robotics Research. Volume 21 Issue 10 - Publication Date: 1 October 2002 [13] Ayers, J. and Witting, J. (2007) Biomimetic Approaches to the Control of Underwater Walking Machines. Philosophical Transactions of the Royal Society, A, 365, 273ะ295 Ayers, J. and Witting, J. (2007) Biomimetic Approaches to the Control of Underwater Walking Machines. Philosophical Transactions of the Royal Society, A, 365, [14] Cruse H, Kindermann T, Schumm M, Dean J, Schmitz J (1998) Walknet - a biologically inspired to control six-legged walking. Neural Networks 11: [15] Beer RD, Quinn RD, Chiel HJ, Ritzmann RE (1997) Biologically inspired approaches to robotics: what can we learn from insects? Communications of the ACM 40: [16] Hiroshi Kimura, Yasuhiro Fukuoka and Avis H. Cohen, "Biologically Inspired Adaptive Walking of a Quadruped Robot", Theme Issue on Walking machines, F.Pfeiffer and H.Inoue (Eds.), Philosophical Transactions of the Royal Society A, Vol.365, No.1850, pp , (Abstract on line, PDF) 6
7 References: [17] A. Bueschges, J. Neurophysiol. 93, 1127 (2005). Sensory control and organization of neural s mediating coordination of multisegmental organs for locomotion, Journal of Neurophysiology 93: [18] Kirchner, F., Spenneberg, D., & Linnemann, R. (2002). A biologically inspired approach towards robust real world locomotion in an 8-legged robot. In: J. Ayers, J. Davis, & A. Rudolph (Eds.), Neurotechnology for Biomimetic Robots. MIT-Press, MA, USA. [19] Pasemann, F., Hild, M., Zahedi, K. SO(2)-Networks as Neural Oscillators, Mira, J., and Alvarez, J. R., (Eds.), Computational Methods in Neural Modeling, Proceedings IWANN 2003, LNCS 2686, Springer, Berlin, pp , *.pdf *.ps [20] Fischer, J.; Pasemann, F.; Manoonpong, P. (2004). Neuro-controllers for walking machines - an evolutionary approach to robust behavior. In: M. Armada; P. Gonzalez de Santos (eds.), Proceedings of the Seventh International Conference on Climbing and Walking Robots (CLAWAR 04), Springer-Verlag, pp (pdf) [21] 64] Fischer, J. (2004). A modulatory learning rule for neural learning and metalearning in real world robots with many degrees of freedom. Ph.D. thesis, University of Muenster, Germany, Aachen: Shaker. [22] Manoonpong, P.; Pasemann, F.; Roth, H. (2007). Modular reactive neurocontrol for biologically-inspired walking machines. The International Journal of Robotics Research, vol. 26, no. 3, pp , DOI: / (pdf) [23] Dreissigacker, S. (2007) Investigation of control methods for a chaos controlled CPG for simulus induced behavior control of walking machines, Diploma thesis, University of Goettingen. 7
RECOGNIZING that, to date, most research in the domain
 Reactive Neural Control for Phototaxis and Obstacle Avoidance Behavior of Walking Machines Poramate Manoonpong, Frank Pasemann, and Florentin Wörgötter Abstract This paper describes reactive neural control
Reactive Neural Control for Phototaxis and Obstacle Avoidance Behavior of Walking Machines Poramate Manoonpong, Frank Pasemann, and Florentin Wörgötter Abstract This paper describes reactive neural control
Neural Control and Learning for Versatile, Adaptive, Autonomous Behavior of Walking Machines
 Neural Control and Learning for Versatile, Adaptive, Autonomous Behavior of Walking Machines Poramate Manoonpong 1 and Florentin Wörgötter 2 Bernstein Center for Computational Neuroscience (BCCN), University
Neural Control and Learning for Versatile, Adaptive, Autonomous Behavior of Walking Machines Poramate Manoonpong 1 and Florentin Wörgötter 2 Bernstein Center for Computational Neuroscience (BCCN), University
Supplementary information accompanying the manuscript. Self-organized adaptation of simple neural circuits enables complex robot behavior
 Supplementary information accompanying the manuscript Self-organized adaptation of simple neural circuits enables complex robot behavior Silke Steingrube,2, Marc Timme,3,4, Florentin Wörgötter,4 and Poramate
Supplementary information accompanying the manuscript Self-organized adaptation of simple neural circuits enables complex robot behavior Silke Steingrube,2, Marc Timme,3,4, Florentin Wörgötter,4 and Poramate
The development of a biomechanical leg system and its neural control
 The development of a biomechanical leg system and its neural control Daniel Renjewski and André Seyfarth Lauflabor Locomotion Laboratory University of Jena Dornburger Strae 23, 07743 Jena, Germany {daniel.renjewski,
The development of a biomechanical leg system and its neural control Daniel Renjewski and André Seyfarth Lauflabor Locomotion Laboratory University of Jena Dornburger Strae 23, 07743 Jena, Germany {daniel.renjewski,
INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL
 1 INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern Kaiserslautern, Germany E-mail: luksch@informatik.uni-kl.de
1 INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern Kaiserslautern, Germany E-mail: luksch@informatik.uni-kl.de
Outline. Outline. Recent Popular Legged Robots in Japan. Self-contained! Adaptive? Limit Cycle Based. What is legged locomotion?
 Neuromorphic Eng. Workshop, Telluride, 14 Jul. 2003 Biological Inspired Legged Locomotion Control of a Robot Hiroshi Kimura Univ. of Electro-Communications Tokyo, Japan Katsuyoshi Tsujita Kyoto Univ. Japan
Neuromorphic Eng. Workshop, Telluride, 14 Jul. 2003 Biological Inspired Legged Locomotion Control of a Robot Hiroshi Kimura Univ. of Electro-Communications Tokyo, Japan Katsuyoshi Tsujita Kyoto Univ. Japan
The Influence of Friction on Gait and Energy Efficiency of the Walking Robot Based on Rhythmic Control
 The Influence of Friction on Gait and Energy Efficiency of the Walking Robot Based on Rhythmic Control H. Takemura, J. Ueda, Y. Matsumoto, T. Ogasawara Nara Institute of Science and Technology, Takayama-cho,
The Influence of Friction on Gait and Energy Efficiency of the Walking Robot Based on Rhythmic Control H. Takemura, J. Ueda, Y. Matsumoto, T. Ogasawara Nara Institute of Science and Technology, Takayama-cho,
From Passive to Active Dynamic 3D Bipedal Walking - An Evolutionary Approach -
 From Passive to Active Dynamic 3D Bipedal Walking - An Evolutionary Approach - Steffen Wischmann and Frank Pasemann Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, 53754
From Passive to Active Dynamic 3D Bipedal Walking - An Evolutionary Approach - Steffen Wischmann and Frank Pasemann Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, 53754
arxiv: v1 [cs.ai] 11 Jul 2014
![arxiv: v1 [cs.ai] 11 Jul 2014](/thumbs/81/83862180.jpg "arxiv: v1 [cs.ai] 11 Jul 2014") Multiple chaotic central pattern generators with learning for legged locomotion and malfunction compensation Guanjiao Ren a, Weihai Chen a, Sakyasingha Dasgupta b, Christoph Kolodziejski b, Florentin Wörgötter
Multiple chaotic central pattern generators with learning for legged locomotion and malfunction compensation Guanjiao Ren a, Weihai Chen a, Sakyasingha Dasgupta b, Christoph Kolodziejski b, Florentin Wörgötter
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices
 A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
CURRICULUM VITAE Hartmut Geyer
 CURRICULUM VITAE Hartmut Geyer The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 hgeyer@cs.cmu.edu http://cs.cmu.edu/~hgeyer RESEARCH INTERESTS Principles of legged
CURRICULUM VITAE Hartmut Geyer The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 hgeyer@cs.cmu.edu http://cs.cmu.edu/~hgeyer RESEARCH INTERESTS Principles of legged
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud. Hydraulically Actuated Hexapod Robots. Design, Implementation. and Control.
 Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Reservoir-based Online Adaptive Forward Models with Neural Control for Complex Locomotion in a Hexapod Robot
 Reservoir-based Online Adaptive Forward Models with Neural Control for Complex Locomotion in a Hexapod Robot Poramate Manoonpong,3 Sakyasingha Dasgupta Dennis Goldschmidt,2 Florentin Wörgötter Abstract
Reservoir-based Online Adaptive Forward Models with Neural Control for Complex Locomotion in a Hexapod Robot Poramate Manoonpong,3 Sakyasingha Dasgupta Dennis Goldschmidt,2 Florentin Wörgötter Abstract
BIOLOGICALLY INSPIRED QUADRUPED ROBOT BIOSBOT: MODELING, SIMULATION AND EXPERIMENT
 BIOLOGICALLY INSPIRED QUADRUPED ROBOT BIOSBOT: MODELING, SIMULATION AND EXPERIMENT Xu Guan, Haojun Zheng, Xiuli Zhang Department of Precision Instruments and Mechanology, School of Mechanical Engineering
BIOLOGICALLY INSPIRED QUADRUPED ROBOT BIOSBOT: MODELING, SIMULATION AND EXPERIMENT Xu Guan, Haojun Zheng, Xiuli Zhang Department of Precision Instruments and Mechanology, School of Mechanical Engineering
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
A Biologically Inspired Approach to the Coordination of Hexapedal Gait
 007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 007 WeA9.4 A Biologically Inspired Approach to the Coordination of Hexapedal Gait Keith W. Wait and Michael Goldfarb,
007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 007 WeA9.4 A Biologically Inspired Approach to the Coordination of Hexapedal Gait Keith W. Wait and Michael Goldfarb,
Control principles for locomotion looking toward biology
 Control principles for locomotion looking toward biology Avis H. Cohen University of Maryland, Biology Department and Institute for Systems Research, College Park, MD 20742 Abstract Presented here is an
Control principles for locomotion looking toward biology Avis H. Cohen University of Maryland, Biology Department and Institute for Systems Research, College Park, MD 20742 Abstract Presented here is an
Biomimetic Walking Robot Scorpion: Control and Modeling
 Preprint: to appear in Robotics and Autonomous Systems journal (Special Issue: Best papers from SIRS00) Biomimetic Walking Robot Scorpion: Control and Modeling Bernhard Klaassen, Ralf Linnemann, Dirk Spenneberg,
Preprint: to appear in Robotics and Autonomous Systems journal (Special Issue: Best papers from SIRS00) Biomimetic Walking Robot Scorpion: Control and Modeling Bernhard Klaassen, Ralf Linnemann, Dirk Spenneberg,
Keywords--Bio-Robots, Walking Robots, Locomotion and Stability Controlled Gait.
 Six Legged Locomotion on Uneven Terrain Kale Aparna S., Salunke Geeta D. kaleaparna5@gmail.com, geetasalunke@gmail.com Abstract -In this paper current state of many walking robots are compared and advantages
Six Legged Locomotion on Uneven Terrain Kale Aparna S., Salunke Geeta D. kaleaparna5@gmail.com, geetasalunke@gmail.com Abstract -In this paper current state of many walking robots are compared and advantages
Improvement of the Cheetah Locomotion Control
 Improvement of the Cheetah Locomotion Control Master Project - Midterm Presentation 3 rd November 2009 Student : Supervisor : Alexander Sproewitz Professor : Auke Jan Ijspeert Presentation of the Cheetah
Improvement of the Cheetah Locomotion Control Master Project - Midterm Presentation 3 rd November 2009 Student : Supervisor : Alexander Sproewitz Professor : Auke Jan Ijspeert Presentation of the Cheetah
Passive compliant quadruped robot using central pattern generators for locomotion control
 Passive compliant quadruped robot using central pattern generators for locomotion control Simon Rutishauser, Alexander Spröwitz, Ludovic Righetti and Auke Jan Ijspeert Biologically Inspired Robotics Group,
Passive compliant quadruped robot using central pattern generators for locomotion control Simon Rutishauser, Alexander Spröwitz, Ludovic Righetti and Auke Jan Ijspeert Biologically Inspired Robotics Group,
Toward a human-like biped robot with compliant legs
 Robotics and Autonomous Systems ( ) www.elsevier.com/locate/robot Toward a human-like biped robot with compliant legs Fumiya Iida a,b,c,, Yohei Minekawa a, Jürgen Rummel a, André Seyfarth a a Locomotion
Robotics and Autonomous Systems ( ) www.elsevier.com/locate/robot Toward a human-like biped robot with compliant legs Fumiya Iida a,b,c,, Yohei Minekawa a, Jürgen Rummel a, André Seyfarth a a Locomotion
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
MASSIVELY DISTRIBUTED NEUROMORPHIC CONTROL FOR LEGGED ROBOTS MODELED AFTER INSECT STEPPING NICHOLAS STEPHEN SZCZECINSKI
 MASSIVELY DISTRIBUTED NEUROMORPHIC CONTROL FOR LEGGED ROBOTS MODELED AFTER INSECT STEPPING By NICHOLAS STEPHEN SZCZECINSKI Submitted in partial fulfillment of the requirements For the degree of Master
MASSIVELY DISTRIBUTED NEUROMORPHIC CONTROL FOR LEGGED ROBOTS MODELED AFTER INSECT STEPPING By NICHOLAS STEPHEN SZCZECINSKI Submitted in partial fulfillment of the requirements For the degree of Master
Using sensory feedback to improve locomotion performance of the salamander robot in different environments
 Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
Development and Test of a Model for the Cheetah Robot
 Semester Project at the Biologically Inspired Robotics Group, EPF Lausanne Spring 8 Development and Test of a Model for the Cheetah Robot Martin Riess June 6, 28 1 Abstract This project aims at implementing
Semester Project at the Biologically Inspired Robotics Group, EPF Lausanne Spring 8 Development and Test of a Model for the Cheetah Robot Martin Riess June 6, 28 1 Abstract This project aims at implementing
Robot Phase Entrainment on Quadruped CPG Controller
 Robot Phase Entrainment on Quadruped CPG Controller author affiliation email Keywords: Abstract: Central Pattern Generator, Quadruped locomotion, Locomotion Entrainment Central Pattern Generators are widely
Robot Phase Entrainment on Quadruped CPG Controller author affiliation email Keywords: Abstract: Central Pattern Generator, Quadruped locomotion, Locomotion Entrainment Central Pattern Generators are widely
Decentralized Autonomous Control of a Myriapod Locomotion Robot
 Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Lamprey Robots 12. Joseph Ayers, Cricket Wilbur, Chris Olcott Northeastern University Marine Science Center East Point, Nahant, MA USA
 Lamprey Robots 12 Joseph Ayers, Cricket Wilbur, Chris Olcott Northeastern University Marine Science Center East Point, Nahant, MA 01908 USA Abstract We have developed a biologically based underwater, autonomous
Lamprey Robots 12 Joseph Ayers, Cricket Wilbur, Chris Olcott Northeastern University Marine Science Center East Point, Nahant, MA 01908 USA Abstract We have developed a biologically based underwater, autonomous
The International Journal of Robotics Research
 The International Journal of Robotics Research http://ijr.sagepub.com Towards Bipedal Jogging as a Natural Result of Optimizing Walking Speed for Passively Compliant Three-Segmented Legs A. Seyfarth, F.
The International Journal of Robotics Research http://ijr.sagepub.com Towards Bipedal Jogging as a Natural Result of Optimizing Walking Speed for Passively Compliant Three-Segmented Legs A. Seyfarth, F.
Robot Walking with Genetic Algorithms
 Robot Walking with Genetic Algorithms Bente Reichardt 14. December 2015 Bente Reichardt 1/52 Outline Introduction Genetic algorithms Quadruped Robot Hexapod Robot Biped Robot Evaluation Bente Reichardt
Robot Walking with Genetic Algorithms Bente Reichardt 14. December 2015 Bente Reichardt 1/52 Outline Introduction Genetic algorithms Quadruped Robot Hexapod Robot Biped Robot Evaluation Bente Reichardt
A Cockroach-Like Hexapod Robot for Natural Terrain Locomotion
 PERFORMANCE REPORT A Cockroach-Like Hexapod Robot for Natural Terrain Locomotion Grant N00014-96-1-0708 Period of Performance: 3 Years Starting Date: January 1,1996 June 24, 1998 Randall D. Beer Principal
PERFORMANCE REPORT A Cockroach-Like Hexapod Robot for Natural Terrain Locomotion Grant N00014-96-1-0708 Period of Performance: 3 Years Starting Date: January 1,1996 June 24, 1998 Randall D. Beer Principal
The Bio-Inspired SCORPION Robot: Design, Control & Lessons Learned
 9 The Bio-Inspired SCORPION Robot: Design, Control & Lessons Learned Spenneberg Dirk and Kirchner Frank DFKI- German Research Center for Artificial Intelligence, Robotics Lab University of Bremen, Faculty
9 The Bio-Inspired SCORPION Robot: Design, Control & Lessons Learned Spenneberg Dirk and Kirchner Frank DFKI- German Research Center for Artificial Intelligence, Robotics Lab University of Bremen, Faculty
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance
 Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
SIMULATION AND EXPERIMENTAL STUDIES ON WALKING ROBOT WITH FLEXIBLE LEGS
 SIMULATION AND EXPERIMENTAL STUDIES ON WALKING ROBOT WITH LEXIBLE LEGS V. L. Krishnan (a, P. M. Pathak (b, Lokesh Sardana (c, S. C. Jain (d Robotics and Control Laboratory Mechanical and Industrial Engineering
SIMULATION AND EXPERIMENTAL STUDIES ON WALKING ROBOT WITH LEXIBLE LEGS V. L. Krishnan (a, P. M. Pathak (b, Lokesh Sardana (c, S. C. Jain (d Robotics and Control Laboratory Mechanical and Industrial Engineering
Generation of adaptive splitbelt treadmill walking by a biped robot using nonlinear oscillators with phase resetting
 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Generation of adaptive splitbelt treadmill walking by a biped robot using nonlinear
2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Generation of adaptive splitbelt treadmill walking by a biped robot using nonlinear
Genetic Algorithms for Gait Synthesis in a Hexapod Robot
 Published in: Zheng, ed. Recent Trends in Mobile Robots, pp 317-331, World Scientific, New Jersey, 1994. Abstract Genetic Algorithms for Gait Synthesis in a Hexapod Robot M. Anthony Lewis, Andrew H. Fagg
Published in: Zheng, ed. Recent Trends in Mobile Robots, pp 317-331, World Scientific, New Jersey, 1994. Abstract Genetic Algorithms for Gait Synthesis in a Hexapod Robot M. Anthony Lewis, Andrew H. Fagg
Asguard: A Hybrid -Wheel Security and SAR-Robot Using Bio-Inspired Locomotion for Rough Terrain
 Asguard: A Hybrid -Wheel Security and SAR-Robot Using Bio-Inspired Locomotion for Rough Terrain Markus Eich, Felix Grimminger, Stefan Bosse, Dirk Spenneberg, Frank Kirchner Robotics Lab German Research
Asguard: A Hybrid -Wheel Security and SAR-Robot Using Bio-Inspired Locomotion for Rough Terrain Markus Eich, Felix Grimminger, Stefan Bosse, Dirk Spenneberg, Frank Kirchner Robotics Lab German Research
Towards Human-Like Bipedal Locomotion with Three-Segmented Elastic Legs
 Towards Human-Like Bipedal Locomotion with Three-Segmented Elastic Legs Katayon Radkhah, Dorian Scholz, Oskar von Stryk Simulation, Systems Optimization and Robotics Group, Technische Universität Darmstadt,
Towards Human-Like Bipedal Locomotion with Three-Segmented Elastic Legs Katayon Radkhah, Dorian Scholz, Oskar von Stryk Simulation, Systems Optimization and Robotics Group, Technische Universität Darmstadt,
LEGGED animals are capable of adjusting their leg stiffness
 IEEE TRANSACTIONS ON CYBERNETICS 1 Adaptive and Energy Efficient Walking in a Hexapod Robot Under Neuromechanical Control and Sensorimotor Learning Xiaofeng Xiong, Florentin Wörgötter, and Poramate Manoonpong
IEEE TRANSACTIONS ON CYBERNETICS 1 Adaptive and Energy Efficient Walking in a Hexapod Robot Under Neuromechanical Control and Sensorimotor Learning Xiaofeng Xiong, Florentin Wörgötter, and Poramate Manoonpong
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
beestanbul RoboCup 3D Simulation League Team Description Paper 2012
 beestanbul RoboCup 3D Simulation League Team Description Paper 2012 Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek, and Sanem Sariel-Talay Artificial Intelligence
beestanbul RoboCup 3D Simulation League Team Description Paper 2012 Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek, and Sanem Sariel-Talay Artificial Intelligence
Locomotion, Vertebrate
 Locomotion, Vertebrate Auke Jan Ijspeert Department of Computer Science, 3641 Watt Way, Hedco Neuroscience Building University of Southern California, Los Angeles, CA 90089, USA. Email: ijspeert@usc.edu
Locomotion, Vertebrate Auke Jan Ijspeert Department of Computer Science, 3641 Watt Way, Hedco Neuroscience Building University of Southern California, Los Angeles, CA 90089, USA. Email: ijspeert@usc.edu
Hardware Implementation of a CPG-Based Locomotion Control for Quadruped Robots
 Hardware Implementation of a CPG-Based Locomotion Control for Quadruped Robots Jose Hugo Barron-Zambrano 1, Cesar Torres-Huitzil 1, and Bernard Girau 2 1 Information Technology Laboratory, CINVESTAV Tamaulipas,
Hardware Implementation of a CPG-Based Locomotion Control for Quadruped Robots Jose Hugo Barron-Zambrano 1, Cesar Torres-Huitzil 1, and Bernard Girau 2 1 Information Technology Laboratory, CINVESTAV Tamaulipas,
Sensing through body dynamics
 Robotics and Autonomous Systems 54 (2006) 631 640 www.elsevier.com/locate/robot Sensing through body dynamics F. Iida, R. Pfeifer Artificial Intelligence Laboratory, Department of Informatics, University
Robotics and Autonomous Systems 54 (2006) 631 640 www.elsevier.com/locate/robot Sensing through body dynamics F. Iida, R. Pfeifer Artificial Intelligence Laboratory, Department of Informatics, University
Keywords Crab-like robot, central pattern generator, Hopf oscillator, self-adaptive control, complex terrains
 Research Article Central pattern generator and feedforward neural network-based selfadaptive gait control for a crab-like robot locomoting on complex terrain under two reflex mechanisms International Journal
Research Article Central pattern generator and feedforward neural network-based selfadaptive gait control for a crab-like robot locomoting on complex terrain under two reflex mechanisms International Journal
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Learning Energy Efficient Walking with Ballistic Walking
 Learning Energy Efficient Walking with Ballistic Walking Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center, Osaka
Learning Energy Efficient Walking with Ballistic Walking Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center, Osaka
Adaptive Locomotion Controller for a Quadruped Robot
 Adaptive Locomotion Controller for a Quadruped Robot Step 1: Model of sensory feedback in animals during locomotion Simon Ruffieux 07 1 Introduction Sensory feedback is an important component of locomotion
Adaptive Locomotion Controller for a Quadruped Robot Step 1: Model of sensory feedback in animals during locomotion Simon Ruffieux 07 1 Introduction Sensory feedback is an important component of locomotion
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
Robot motion by simultaneously wheel and leg propulsion
 Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Adaptive Dynamic Walking of a Quadruped Robot on Natural Ground Based on Biological Concepts
 Adaptive Dynamic Walking of a Quadruped Robot on Natural Ground Based on Biological Concepts Hiroshi Kimura 1, Yasuhiro Fukuoka 2 and Avis H. Cohen 3 1 Graduate School of Information Systems, University
Adaptive Dynamic Walking of a Quadruped Robot on Natural Ground Based on Biological Concepts Hiroshi Kimura 1, Yasuhiro Fukuoka 2 and Avis H. Cohen 3 1 Graduate School of Information Systems, University
w 13 w 31 w 43 w 34 w 34 swing phase virtual springdamper (a) Neural oscillator network for Patrush y i. desired state present state y i < 0
 Neural oscillator network for Patrush y i. desired state present state y i < 0") Adaptive Dynamic Walking of a Quadruped Robot 'Tekken' on Irregular Terrain Using a Neural System Model Y. Fukuoka, H. Kimura, Y. Hada and K. Takase Univ. of Electro-Communications, Chofu, Tokyo 182-8585,
Adaptive Dynamic Walking of a Quadruped Robot 'Tekken' on Irregular Terrain Using a Neural System Model Y. Fukuoka, H. Kimura, Y. Hada and K. Takase Univ. of Electro-Communications, Chofu, Tokyo 182-8585,
Dynamic locomotion of a biomorphic quadruped Tekken robot using various gaits: walk, trot, free-gait and bound
 Applied Bionics and Biomechanics Vol. 6, No. 1, March 29, 63 71 Dynamic locomotion of a biomorphic quadruped Tekken robot using various gaits: walk, trot, free-gait and bound Y. Fukuoka a and H. Kimura
Applied Bionics and Biomechanics Vol. 6, No. 1, March 29, 63 71 Dynamic locomotion of a biomorphic quadruped Tekken robot using various gaits: walk, trot, free-gait and bound Y. Fukuoka a and H. Kimura
Design and Philosophy of the BiMASC, a Highly Dynamic Biped
 Design and Philosophy of the BiMASC, a Highly Dynamic Biped Jonathan W. Hurst, Joel E. Chestnutt, Alfred A. Rizzi Carnegie Mellon University The Robotics Institute Pittsburgh, Pennsylvania Abstract This
Design and Philosophy of the BiMASC, a Highly Dynamic Biped Jonathan W. Hurst, Joel E. Chestnutt, Alfred A. Rizzi Carnegie Mellon University The Robotics Institute Pittsburgh, Pennsylvania Abstract This
Bio-inspired Methodology for Sprawling Posture Robotic Foot Design. Semester project presentation. Laura Paez
 Bio-inspired Methodology for Sprawling Posture Robotic Foot Design Semester project presentation Laura Paez Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions
Bio-inspired Methodology for Sprawling Posture Robotic Foot Design Semester project presentation Laura Paez Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions
Concept Evaluation of a New Biologically Inspired Robot LittleApe
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Concept Evaluation of a New Biologically Inspired Robot LittleApe Daniel Kühn, Malte Römmermann,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Concept Evaluation of a New Biologically Inspired Robot LittleApe Daniel Kühn, Malte Römmermann,
Sample Solution for Problem 1.a
 Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Learning Energy Efficient Walking Based on Ballistics
 Learning Energy Efficient Walking Based on Ballistics Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center ogino@er.ams.eng.osaka-u.ac.jp,
Learning Energy Efficient Walking Based on Ballistics Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center ogino@er.ams.eng.osaka-u.ac.jp,
Preliminary Bounding Experiments in a Dynamic Hexapod
 Preliminary Bounding Experiments in a Dynamic Hexapod D. Campbell and M. Buehler Ambulatory Robotics Lab, Centre for Intelligent Machines, McGill University, 3480 University St., Montreal, Quebec, H3A
Preliminary Bounding Experiments in a Dynamic Hexapod D. Campbell and M. Buehler Ambulatory Robotics Lab, Centre for Intelligent Machines, McGill University, 3480 University St., Montreal, Quebec, H3A
Toward a Rapid and Robust Attachment Strategy for Vertical Climbing
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Toward a Rapid and Robust Attachment Strategy for Vertical Climbing Abstract
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Toward a Rapid and Robust Attachment Strategy for Vertical Climbing Abstract
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
DESIGN OF A CRAWLING GAIT FOR A MODULAR ROBOT. Carlos Santos Merino and Sabri Tosunoglu
 DESIGN OF A CRAWLING GAIT FOR A MODULAR ROBOT Carlos Santos Merino and Sabri Tosunoglu Florida International University Department of Mechanical Engineering 10555 West Flagler Street Miami, Florida 33174
DESIGN OF A CRAWLING GAIT FOR A MODULAR ROBOT Carlos Santos Merino and Sabri Tosunoglu Florida International University Department of Mechanical Engineering 10555 West Flagler Street Miami, Florida 33174
Subject: Progress Report CLIN 0001AB, SBIR Topic No. N Legged Vehicle for Underwater Mobile Operations
 FAX. 617-740-20C5 ptwx 710-348-6932 TEL. 617-749-4800 Massa Products Corporation' 280 Lincoln Street, Hingham. MA 02043-1796 VIA CERTIFIED MAIL RETURN RECEIPT REQUESTED, REPLY REFER TO September 15, 1994
FAX. 617-740-20C5 ptwx 710-348-6932 TEL. 617-749-4800 Massa Products Corporation' 280 Lincoln Street, Hingham. MA 02043-1796 VIA CERTIFIED MAIL RETURN RECEIPT REQUESTED, REPLY REFER TO September 15, 1994
Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring
 , March 16-18, 2016, Hong Kong Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring Takashige Yano, Jae Hoon Lee, Member, IAENG and Shingo Okamoto 1 Abstract The purpose
, March 16-18, 2016, Hong Kong Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring Takashige Yano, Jae Hoon Lee, Member, IAENG and Shingo Okamoto 1 Abstract The purpose
Walking Gait Generation with Foot Placement Control for the HOAP-3 Humanoid Robot
 Walking Gait Generation with Foot Placement Control for the HOAP-3 Humanoid Robot Yazhou Huang, Robert Backman and Marcelo Kallmann UCM School of Engineering Technical Report TR-2011-002 University of
Walking Gait Generation with Foot Placement Control for the HOAP-3 Humanoid Robot Yazhou Huang, Robert Backman and Marcelo Kallmann UCM School of Engineering Technical Report TR-2011-002 University of
ABSTRACT 1 INTRODUCTION
 Iterative Product Engineering: Evolutionary Robot Design Dominic. R. Frutiger 1, Josh C. Bongard 2, Fumiya Iida 2 1 Centre of Product Engineering, Swiss Federal Institute of Technology, Zürich, Switzerland
Iterative Product Engineering: Evolutionary Robot Design Dominic. R. Frutiger 1, Josh C. Bongard 2, Fumiya Iida 2 1 Centre of Product Engineering, Swiss Federal Institute of Technology, Zürich, Switzerland
A CPG-based Decentralized Control of a Quadruped Robot Inspired by True Slime Mold
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan A CPG-based Decentralized Control of a Quadruped Robot Inspired by True Slime Mold Takeshi
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan A CPG-based Decentralized Control of a Quadruped Robot Inspired by True Slime Mold Takeshi
A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking
 1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007.
 Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
isprawl: Autonomy, and the Effects of Power Transmission
 isprawl: Autonomy, and the Effects of Power Transmission Sangbae Kim, Jonathan E. Clark, and Mark R. Cutkosky Department of Mechanical Engineering Stanford University, Stanford, CA 935 cutkosky@stanford.edu
isprawl: Autonomy, and the Effects of Power Transmission Sangbae Kim, Jonathan E. Clark, and Mark R. Cutkosky Department of Mechanical Engineering Stanford University, Stanford, CA 935 cutkosky@stanford.edu
KOTARO SASAKI Curriculum Vitae
 KOTARO SASAKI Curriculum Vitae Department of Mechanical & Biomedical Engineering Boise State University 1910 University Dr. Boise ID 83725-2075 Phone: (208) 426-4027 Email: kosasaki@boisestate.edu EDUCATION
KOTARO SASAKI Curriculum Vitae Department of Mechanical & Biomedical Engineering Boise State University 1910 University Dr. Boise ID 83725-2075 Phone: (208) 426-4027 Email: kosasaki@boisestate.edu EDUCATION
RUNNING ON SOFT GROUND: SIMPLE, ENERGY-OPTIMAL DISTURBANCE REJECTION
 CLAWAR 2012 Proceedings of the Fifteenth International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Baltimore, MD, USA, 23 26 July 2012 543 RUNNING ON SOFT
CLAWAR 2012 Proceedings of the Fifteenth International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Baltimore, MD, USA, 23 26 July 2012 543 RUNNING ON SOFT
Body Stabilization of PDW toward Humanoid Walking
 Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
HUMANOID robots involve many technical issues to be
 IEEE TRANSACTIONS ON ROBOTICS, VOL. 21, NO. 5, OCTOBER 2005 977 Sensory Reflex Control for Humanoid Walking Qiang Huang and Yoshihiko Nakamura, Member, IEEE Abstract Since a biped humanoid inherently suffers
IEEE TRANSACTIONS ON ROBOTICS, VOL. 21, NO. 5, OCTOBER 2005 977 Sensory Reflex Control for Humanoid Walking Qiang Huang and Yoshihiko Nakamura, Member, IEEE Abstract Since a biped humanoid inherently suffers
Comparing the Locomotion Dynamics of the Cockroach and a Shape Deposition Manufactured Biomimetic Hexapod
 Comparing the Locomotion Dynamics of the Cockroach and a Shape Deposition Manufactured Biomimetic Hexapod Sean A. Bailey, Jorge G. Cham, Mark R. Cutkosky Center for Design Research Stanford University
Comparing the Locomotion Dynamics of the Cockroach and a Shape Deposition Manufactured Biomimetic Hexapod Sean A. Bailey, Jorge G. Cham, Mark R. Cutkosky Center for Design Research Stanford University
Optimizing Footfall Patterns for Gait Transitions
 Optimizing Footfall Patterns for Gait Transitions Shuang Su CMU-CS-17-111 May 2017 Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 Thesis Committee: Stelian Coros, Chair Nancy
Optimizing Footfall Patterns for Gait Transitions Shuang Su CMU-CS-17-111 May 2017 Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 Thesis Committee: Stelian Coros, Chair Nancy
Simulation Study on Acquisition Process of Locomotion by using an Infant Robot
 21 Simulation Study on Acquisition Process of Locomotion by using an Infant Robot Katsuyoshi Tsujita and Tatsuya Masuda Dept. of Electrical and Electronic Systems Engineering, Osaka Institute of Technology
21 Simulation Study on Acquisition Process of Locomotion by using an Infant Robot Katsuyoshi Tsujita and Tatsuya Masuda Dept. of Electrical and Electronic Systems Engineering, Osaka Institute of Technology
Gait Analysis of a Little Biped Robot. Received May 2015; accepted July 2015
 ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
Evolving Gaits for the Lynxmotion Hexapod II Robot
 Evolving Gaits for the Lynxmotion Hexapod II Robot DAVID TOTH Computer Science, Worcester Polytechnic Institute Worcester, MA 01609-2280, USA toth@cs.wpi.edu, http://www.cs.wpi.edu/~toth and GARY PARKER
Evolving Gaits for the Lynxmotion Hexapod II Robot DAVID TOTH Computer Science, Worcester Polytechnic Institute Worcester, MA 01609-2280, USA toth@cs.wpi.edu, http://www.cs.wpi.edu/~toth and GARY PARKER
Locomotion Concepts. Autonomous Mobile Robots. Concepts Legged Locomotion Wheeled Locomotion. Autonomous Systems Lab. Zürich. Localization.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Homeostasis and Long-term Autonomy in Multi-Robot Systems
 Homeostasis and Long-term Autonomy in Multi-Robot Systems Lachlan Murray Intelligent Systems Group Department of Electronics University of York April 9, 2010 Lachlan Murray (UoY) April 9, 2010 1 / 13 Introduction
Homeostasis and Long-term Autonomy in Multi-Robot Systems Lachlan Murray Intelligent Systems Group Department of Electronics University of York April 9, 2010 Lachlan Murray (UoY) April 9, 2010 1 / 13 Introduction
H A E - W O N P A R K
 H A E - W O N P A R K Business Address Massachusetts Institute of Technology 5-017, 77 Massachusetts Avenue Cambridge, MA 02139-4307 (617) 715-4309; parkhw@mit.edu Home Address 2 Menlo Street Brighton,
H A E - W O N P A R K Business Address Massachusetts Institute of Technology 5-017, 77 Massachusetts Avenue Cambridge, MA 02139-4307 (617) 715-4309; parkhw@mit.edu Home Address 2 Menlo Street Brighton,
Today: the first activity system. Neural Control of Movement LOCOMOTION GAIT DESCRIPTIONS. Review: that amazing spinal cord! What we do: gait patterns
 Neural Control of Movement LOCOMOTION Today: the first activity system Review: that amazing spinal cord! What we do: gait patterns How we do it: neural circuitry and the role of sensory feedback and higher
Neural Control of Movement LOCOMOTION Today: the first activity system Review: that amazing spinal cord! What we do: gait patterns How we do it: neural circuitry and the role of sensory feedback and higher
This course will deal with Locomotion and Navigation that includes:
 1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
Introducing MantisBot: Hexapod Robot Controlled by a High- Fidelity, Real-Time Neural Simulation*
 Introducing MantisBot: Hexapod Robot Controlled by a High- Fidelity, Real-Time Neural Simulation* Nicholas S. Szczecinski, David M. Chrzanowski, David W. Cofer, Andrea S. Terrasi, David R. Moore, Joshua
Introducing MantisBot: Hexapod Robot Controlled by a High- Fidelity, Real-Time Neural Simulation* Nicholas S. Szczecinski, David M. Chrzanowski, David W. Cofer, Andrea S. Terrasi, David R. Moore, Joshua
Team FUB-KIT Introduction. 2 Hardware Description
 Team FUB-KIT 2014 Amir Ali Forough Nassiraei, Hamid Mobalegh, Remma Satoh, Takashi Sonoda, Kazuo Ishii, Raul Rojas nassiraei@brain.kyutech.ac.jp, moballegh@gmail.com, satoh-remma@edu.brain.kyutech.ac.jp,
Team FUB-KIT 2014 Amir Ali Forough Nassiraei, Hamid Mobalegh, Remma Satoh, Takashi Sonoda, Kazuo Ishii, Raul Rojas nassiraei@brain.kyutech.ac.jp, moballegh@gmail.com, satoh-remma@edu.brain.kyutech.ac.jp,
LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS
 LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS GARY B. PARKER and INGO CYLIAX Department of Computer Science, Indiana University, Bloomington, IN 47405 gaparker@cs.indiana.edu, cyliax@cs.indiana.edu
LOCOMOTION CONTROL CYCLES ADAPTED FOR DISABILITIES IN HEXAPOD ROBOTS GARY B. PARKER and INGO CYLIAX Department of Computer Science, Indiana University, Bloomington, IN 47405 gaparker@cs.indiana.edu, cyliax@cs.indiana.edu
Proof Copy. Controlling the Walking Period of a Pneumatic Muscle Walker. Takashi Takuma Koh Hosoda. Abstract. 1. Introduction
 Takashi Takuma Koh Hosoda Department of Adaptive Machine Systems Graduate School of Engineering, Osaka University Yamadaoka 2 1, Suita, Osaka 565 0871, Japan {takuma,hosoda}@ams.eng.osaka-u.ac.jp Controlling
Takashi Takuma Koh Hosoda Department of Adaptive Machine Systems Graduate School of Engineering, Osaka University Yamadaoka 2 1, Suita, Osaka 565 0871, Japan {takuma,hosoda}@ams.eng.osaka-u.ac.jp Controlling
Gait Regulation and Feedback on a Robotic Climbing Hexapod
 Robotics: Science and Systems 26 Philadelphia, PA, August 16-19, 26 Gait Regulation and Feedback on a Robotic Climbing Hexapod G. Clark Haynes and Alfred A. Rizzi The Robotics Institute Carnegie Mellon
Robotics: Science and Systems 26 Philadelphia, PA, August 16-19, 26 Gait Regulation and Feedback on a Robotic Climbing Hexapod G. Clark Haynes and Alfred A. Rizzi The Robotics Institute Carnegie Mellon
Walking Programming for a Low-Cost Easy-Operation Cassino Hexapod
 Walking Programming for a Low-Cost Easy-Operation Cassino Hexapod Aviral Shrot 1, Giuseppe Carbone 2, Marco Ceccarelli 3 * 1 Department of Mechanical Engineering, Indian Institute of Technology Madras,
Walking Programming for a Low-Cost Easy-Operation Cassino Hexapod Aviral Shrot 1, Giuseppe Carbone 2, Marco Ceccarelli 3 * 1 Department of Mechanical Engineering, Indian Institute of Technology Madras,
A hexapod walker using a heterarchical architecture for action selection
 COMPUTATIONAL NEUROSCIENCE ORIGINAL RESEARCH ARTICLE published: 17 September 2013 doi: 10.3389/fncom.2013.00126 A hexapod walker using a heterarchical architecture for action selection Malte Schilling
COMPUTATIONAL NEUROSCIENCE ORIGINAL RESEARCH ARTICLE published: 17 September 2013 doi: 10.3389/fncom.2013.00126 A hexapod walker using a heterarchical architecture for action selection Malte Schilling
Towards Pronking with a Hexapod Robot
 Towards Pronking with a Hexapod Robot D. McMordie and M. Buehler Ambulatory Robotics Lab, Centre for Intelligent Machines, McGill University {mcmordie, buehler} @cim.mcgill.ca Abstract This paper presents
Towards Pronking with a Hexapod Robot D. McMordie and M. Buehler Ambulatory Robotics Lab, Centre for Intelligent Machines, McGill University {mcmordie, buehler} @cim.mcgill.ca Abstract This paper presents
The Incremental Evolution of Gaits for Hexapod Robots
 The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
Six Legged Mobile Robot based on Tripod Gait
 Six Legged Mobile Robot based on Tripod Gait Victor Adîr, Tempea Iosif, George Adîr Theory of Mechanisms and Robots Dept., University Politehnica of Bucharest Spl. Independenţei no. 313, 77206, sector
Six Legged Mobile Robot based on Tripod Gait Victor Adîr, Tempea Iosif, George Adîr Theory of Mechanisms and Robots Dept., University Politehnica of Bucharest Spl. Independenţei no. 313, 77206, sector
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
Optimal limb length ratio of quadruped robot minimising joint torque on slopes
 Applied Bionics and Biomechanics Vol. 6, No. 3 4, September December 2009, 259 268 Optimal limb length ratio of quadruped robot minimising joint torque on slopes Tadayoshi Aoyama a, Kosuke Sekiyama b,
Applied Bionics and Biomechanics Vol. 6, No. 3 4, September December 2009, 259 268 Optimal limb length ratio of quadruped robot minimising joint torque on slopes Tadayoshi Aoyama a, Kosuke Sekiyama b,
Walking Robots and the Central and Peripheral Control of Locomotion in Insects
 Autonomous Robots 7, 259 270 (1999) c 1999 Kluwer Academic Publishers. Manufactured in The Netherlands. Walking Robots and the Central and Peripheral Control of Locomotion in Insects FRED DELCOMYN Department
Autonomous Robots 7, 259 270 (1999) c 1999 Kluwer Academic Publishers. Manufactured in The Netherlands. Walking Robots and the Central and Peripheral Control of Locomotion in Insects FRED DELCOMYN Department
BIOLOGICALLY INSPIRED LOCOMOTION CONTROL OF BIPEDAL ROBOT FENG KAI. (B.Eng., Harbin Inst. of Tech.)
") BIOLOGICALLY INSPIRED LOCOMOTION CONTROL OF BIPEDAL ROBOT FENG KAI (B.Eng., Harbin Inst. of Tech.) A THESIS SUBMITTED FOR THE DEGREE OF MASTER OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING NATIONAL
BIOLOGICALLY INSPIRED LOCOMOTION CONTROL OF BIPEDAL ROBOT FENG KAI (B.Eng., Harbin Inst. of Tech.) A THESIS SUBMITTED FOR THE DEGREE OF MASTER OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING NATIONAL