Bio-inspired Methodology for Sprawling Posture Robotic Foot Design. Semester project presentation. Laura Paez
|
|
|
- Conrad Tate
- 5 years ago
- Views:
Transcription


1 Bio-inspired Methodology for Sprawling Posture Robotic Foot Design Semester project presentation Laura Paez
2 Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions 2
3 Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions 3

4 Animal Aquatic Stepping

5 Pleurobot Aquatic Stepping
6 Hypothesis Fingers and the whole foot structure are important for walking gaits in sprawling posture robots, especially for aquatic stepping gaits, as some recent experiments using Pleurobot indicate a thrust generation due to the finger push off the ground. 6
7 Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions 7

8 Systematic selection of representative species (Sprawling posture, undulatory spine)
9 Clustering of species by biomechanic evaluation
10 Clustering of species by biomechanic evaluation
11 Clustering of species by biomechanic evaluation scratch-robot-design purposes The robot designers have already a robot (e.g. Pleurobot)
12 Foot design parameters
13 Foot design parameters
14 Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions
15 Animal species and features design selection Tiger salamander (Ambystoma tigrinum) Bone structure and bone dimensions Data related to the kinematics of the stride Measurements of ground reaction forces (GRF)



16 Technology Selection Hillberry Joint Pair of cylinders in rolling contact on each other Low friction Elastic ligaments Pisa/IIT SoftHand

17 Finger design
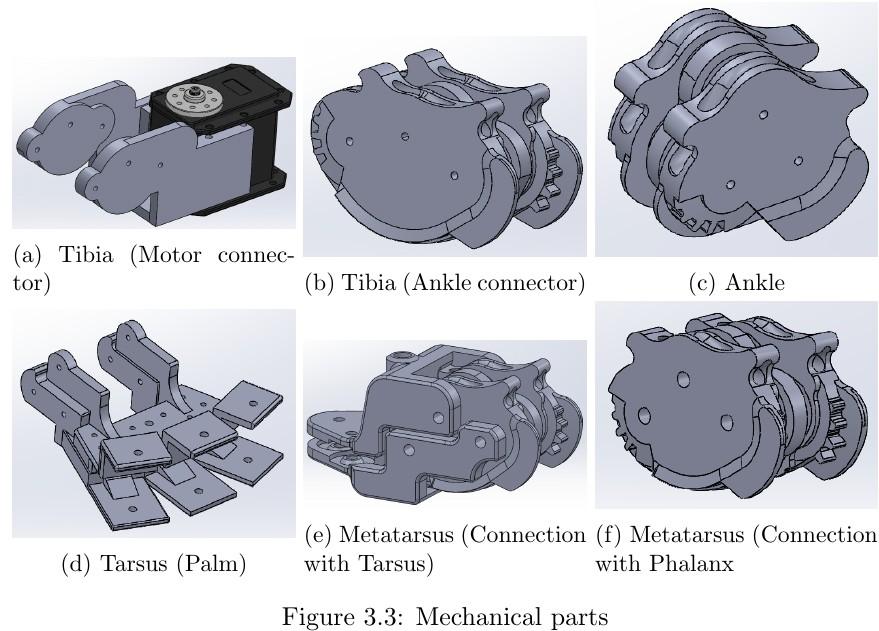
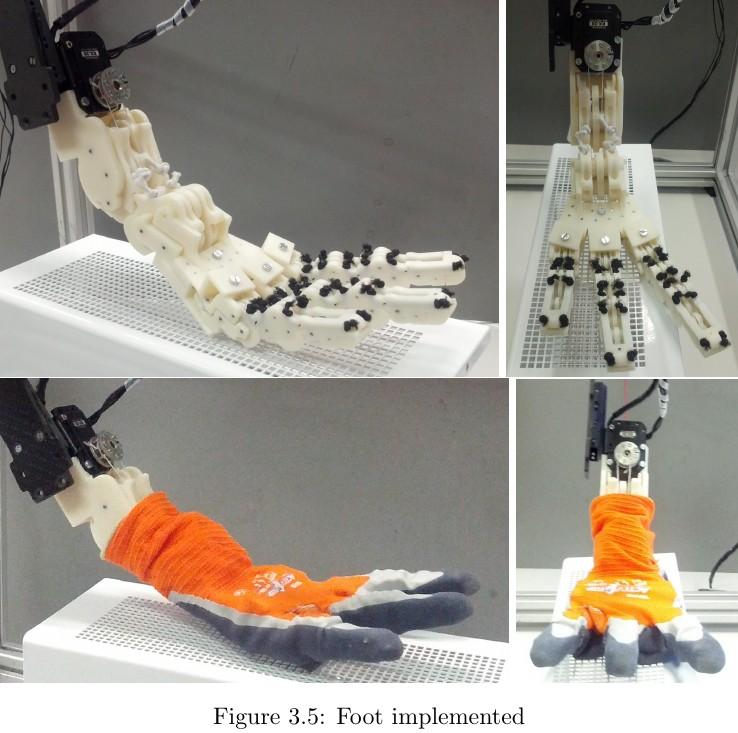
18 Mechanical integration

19 Final Foot Design.
20
21 Animal vs Robotic Foot
22 Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions

23 Set up
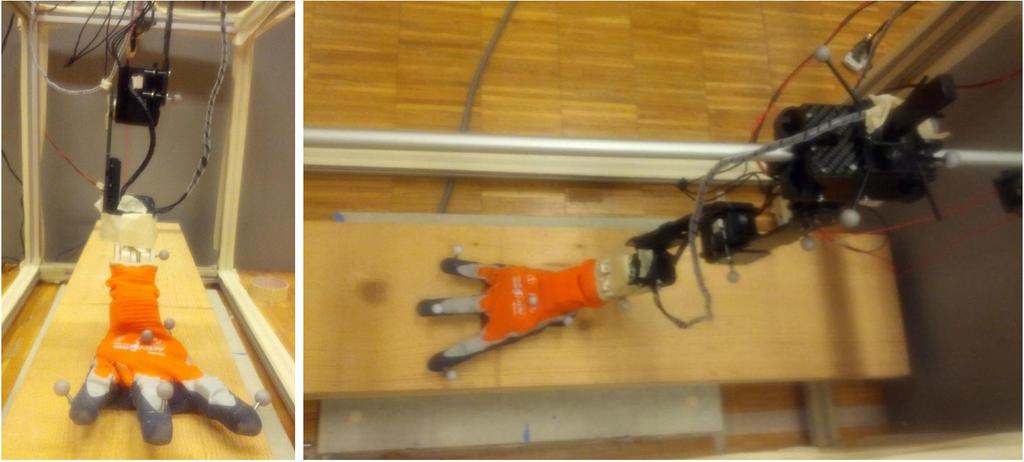
24 Experiment
25 Ground Reaction Forces

26 Kinematic data synchronization: MoCap and Force Plates

27 Final Sequence

28 Extra features
29 Outline Motivation Design methodology Implementation Experimental results Conclusions & Questions
30 Conclusion Fingers and the whole foot structure are important for walking gaits in sprawling posture robots, especially for aquatic stepping gaits, as some recent experiments using Pleurobot indicate a thrust generation due to the.finger push off the ground Experiments carried out with the proposed foot robot mechanism were sufficient to describe when and how each of the fingers action during the whole stride impact on the GRFs. Enough experimental evidence to keep working on the hypothesis above. Going deeper in this study using such a mechanical foot implementation.
31 Conclusion The foot design, provides richer understanding of locomotion schemes featuring robust ground placement. Making robots like Pleurobot. by being more accurate w.r.t. biology. A great consequence of the technology used for the implementation is the terrain adaptability and simultaneous high resilience to hit obstacles while in operation. This provides a high potential in the use of such mechanisms for real field tasks in search and rescue.
32 Conclusion All these presented features related to the final implementation of the robotic foot mechanism, came from a systematic design methodology which is bio-inspired.. Classification of morphologies and the extraction of simple parameters allow the design of different feet for different sprawling animals in a generic way. The top-down approach in animal taxonomy allows the user of the methodology to simply locate the biological characteristics like sprawling posture and undulatory spine design its own food/robot. Beyond this design still remain interesting open questions like how to program the adequate foot actuation according to the motion of the whole leg and even more, according to the terrain.
33 References 1. Reilly, S. M. and J. A. Elias Locomotion in Alligator mississippiensis: kinematic effects of speed and posture and their relevance to the sprawling-to-erect paradigm. Journal of Experimental Biology 201: Irschick DJ, Jayne BC Comparative three-dimensional kinematics of the hindlimb for high-speed bipedal and quadrupedal locomotion of lizards. Journal of Experimental Biology. 202: C. L. Fieler and B. C. Jayne, Effects of speed on the hindlimb kinematics of the lizard Dipsosaurus dorsalis, Journal of Experimental Biology, vol. 201, no. 4, pp , Clemente, C. J., Withers, P. C. & Thompson, G. G. Optimal body size with respect to maximal speed for the yellow-spotted monitor lizard (Varanus panoptes; Varanidae). Physiol. Biochem. Zool. 85, (2012). 6. Ahn, Anna N., E. Furrow, and Andrew A. Biewener. Walking and running in the redlegged running frog, Kassina maculata. Journal of Experimental Biology (2004):
34 References ASHLEY-ROSS,M. A. (1994a). Hindlimb kinematics during terrestriallocomotion in a salamander (Dicamptodon tenebrosus). J. exp.biol.193, ASHLEY-ROSS, M. A. (1994b). Metamorphic and speed effects on hindlimb kinematics during terrestrial locomotion in the salamander Dicamptodon tenebrosus. J.exp. Biol. 193, Chevallier, S., M. Landry, F. Nagy and J.M. Cabelguen, Recovery of bimodal locomotion in the spinal-transected salamander, Pleurodeles waltlii. Eur. J. Neurosci., 20: DOI: /j x 11. Sheffield KM, Blob RW. Loading mechanics of the femur in tiger salamanders (Ambystoma tigrinum) during terrestrial locomotion. J Exp Biol 2011;214: Catalano, M. G., Grioli, G., Farnioli, E., Serio, A., Piazza, C., & Bicchi, A. (2014). Adaptive synergies for the design and control of the Pisa/IIT SoftHand. The International Journal of Robotics Research, 33(5),
35 Questions?
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud. Hydraulically Actuated Hexapod Robots. Design, Implementation. and Control.
 Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
Kenzo Nonami Ranjit Kumar Barai Addie Irawan Mohd Razali Daud Hydraulically Actuated Hexapod Robots Design, Implementation and Control 4^ Springer 1 Introduction 1 1.1 Introduction 1 1.2 Walking "Machines"
1/10/2013. Musculoskeletal Integration. What forces is a body subjected to on land? What forces is a body subjected to on land?
 Topic : Support & Locomotion on Land What forces is the body subjected to on land? Balance Posture Gait How is the vertebral column involved in locomotion? Support Movement How are the limbs involved in
Topic : Support & Locomotion on Land What forces is the body subjected to on land? Balance Posture Gait How is the vertebral column involved in locomotion? Support Movement How are the limbs involved in
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Running on water: Three-dimensional force generation by basilisk lizards
 Running on water: Three-dimensional force generation by basilisk lizards S. Tonia Hsieh* and George V. Lauder Department of Organismic and Evolutionary Biology, Harvard University, 26 Oxford Street, Cambridge,
Running on water: Three-dimensional force generation by basilisk lizards S. Tonia Hsieh* and George V. Lauder Department of Organismic and Evolutionary Biology, Harvard University, 26 Oxford Street, Cambridge,
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
EFFECTS OF INCLINE AND SPEED ON THE THREE-DIMENSIONAL HINDLIMB KINEMATICS OF A GENERALIZED IGUANIAN LIZARD (DIPSOSAURUS DORSALIS)
") The Journal of Experimental Biology 22, 143 159 (1999) Printed in Great Britain The Company of Biologists Limited 1998 JEB172 143 EFFECTS OF INCLINE AND SPEED ON THE THREE-DIMENSIONAL HINDLIMB KINEMATICS
The Journal of Experimental Biology 22, 143 159 (1999) Printed in Great Britain The Company of Biologists Limited 1998 JEB172 143 EFFECTS OF INCLINE AND SPEED ON THE THREE-DIMENSIONAL HINDLIMB KINEMATICS
A 3D musculo-mechanical model of the salamander for the study of different gaits and modes of locomotion
 NEUROROBOTICS Methods Article published: 16 December 2010 doi: 10.3389/fnbot.2010.00112 A 3D musculo-mechanical model of the salamander for the study of different gaits and modes of locomotion Nalin Harischandra
NEUROROBOTICS Methods Article published: 16 December 2010 doi: 10.3389/fnbot.2010.00112 A 3D musculo-mechanical model of the salamander for the study of different gaits and modes of locomotion Nalin Harischandra
Sample Solution for Problem 1.a
 Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
THE OHIO JOURNAL OF SCIENCE
 THE OHIO JOURNAL OF SCIENCE Vol. 72 JULY, 1972 No. 4 BODY FORM AND GAIT IN TERRESTRIAL VERTEBRATES 1 WARREN F. WALKER, JR. Department of Biology, Oberlin College, Oberlin, Ohio 44074 One appeal of pure
THE OHIO JOURNAL OF SCIENCE Vol. 72 JULY, 1972 No. 4 BODY FORM AND GAIT IN TERRESTRIAL VERTEBRATES 1 WARREN F. WALKER, JR. Department of Biology, Oberlin College, Oberlin, Ohio 44074 One appeal of pure
Using sensory feedback to improve locomotion performance of the salamander robot in different environments
 Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices
 A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
Supplementary Information
 Supplementary Information Novel robotic interface to evaluate, enable, and train locomotion and balance after neuromotor disorders Nadia Dominici, Urs Keller, Heike Vallery, Lucia Friedli, Rubia van den
Supplementary Information Novel robotic interface to evaluate, enable, and train locomotion and balance after neuromotor disorders Nadia Dominici, Urs Keller, Heike Vallery, Lucia Friedli, Rubia van den
Skippy: Reaching for the Performance Envelope
 Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL
 1 INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern Kaiserslautern, Germany E-mail: luksch@informatik.uni-kl.de
1 INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern Kaiserslautern, Germany E-mail: luksch@informatik.uni-kl.de
MECHANICS OF LOCOMOTION IN LIZARDS
 The Journal of Experimental Biology 2, 2177 2188 (1997) Printed in Great Britain The Company of Biologists Limited 1997 JEB769 2177 MECHANICS OF LOCOMOTION IN LIZARDS CLAIRE T. FARLEY* AND T. CHRISTINE
The Journal of Experimental Biology 2, 2177 2188 (1997) Printed in Great Britain The Company of Biologists Limited 1997 JEB769 2177 MECHANICS OF LOCOMOTION IN LIZARDS CLAIRE T. FARLEY* AND T. CHRISTINE
Differential leg function in a sprawled-posture quadrupedal trotter
 249 The Journal of Experimental Biology 29, 249-259 Published by The Company of Biologists 26 doi:1.1242/jeb.1979 Differential leg function in a sprawled-posture quadrupedal trotter J. J. Chen 1, A. M.
249 The Journal of Experimental Biology 29, 249-259 Published by The Company of Biologists 26 doi:1.1242/jeb.1979 Differential leg function in a sprawled-posture quadrupedal trotter J. J. Chen 1, A. M.
Proposed Paralympic Classification System for Va a Information for National federations and National Paralympic Committees
 Proposed Paralympic Classification System for Va a Information for National federations and National Paralympic Committees Prepared by the research team Johanna Rosén, MSc, PhD student, member Paracanoe
Proposed Paralympic Classification System for Va a Information for National federations and National Paralympic Committees Prepared by the research team Johanna Rosén, MSc, PhD student, member Paracanoe
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Walking and running in the red-legged running frog, Kassina maculata
 The Journal of Experimental Biology 27, 399-41 Published by The Company of Biologists 24 doi:1.1242/jeb.761 399 Walking and running in the red-legged running frog, Kassina maculata A. N. Ahn*, E. Furrow
The Journal of Experimental Biology 27, 399-41 Published by The Company of Biologists 24 doi:1.1242/jeb.761 399 Walking and running in the red-legged running frog, Kassina maculata A. N. Ahn*, E. Furrow
Gait transition from swimming to walking: investigation of salamander locomotion control using nonlinear oscillators
 Gait transition from swimming to walking: investigation of salamander locomotion control using nonlinear oscillators Auke Jan Ijspeert and Jean-Marie Cabelguen Swiss Federal Institute of Technology, Lausanne
Gait transition from swimming to walking: investigation of salamander locomotion control using nonlinear oscillators Auke Jan Ijspeert and Jean-Marie Cabelguen Swiss Federal Institute of Technology, Lausanne
Passive compliant quadruped robot using central pattern generators for locomotion control
 Passive compliant quadruped robot using central pattern generators for locomotion control Simon Rutishauser, Alexander Spröwitz, Ludovic Righetti and Auke Jan Ijspeert Biologically Inspired Robotics Group,
Passive compliant quadruped robot using central pattern generators for locomotion control Simon Rutishauser, Alexander Spröwitz, Ludovic Righetti and Auke Jan Ijspeert Biologically Inspired Robotics Group,
Gait analysis for the development of the biped robot foot structure
 Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Motor control of locomotor hindlimb posture in the American alligator (Alligator mississippiensis)
") The Journal of Experimental Biology 206, 4327-4340 2003 The Company of Biologists Ltd doi:10.1242/jeb.00688 4327 Motor control of locomotor hindlimb posture in the American alligator (Alligator mississippiensis)
The Journal of Experimental Biology 206, 4327-4340 2003 The Company of Biologists Ltd doi:10.1242/jeb.00688 4327 Motor control of locomotor hindlimb posture in the American alligator (Alligator mississippiensis)
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a)
") Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a) Side and ventral images of adult female flies used to calculate the sizes of body and leg segments. Scale bar is 0.3 mm. Green,
Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a) Side and ventral images of adult female flies used to calculate the sizes of body and leg segments. Scale bar is 0.3 mm. Green,
Efficient Gait Generation using Reinforcement Learning
 Efficient Gait Generation using Reinforcement Learning Josep M Porta and Enric Celaya Institut de Robòtica i Informàtica Industrial, UPC-CSIC, Barcelona, Spain. SYNOPSIS The use of a free gait becomes
Efficient Gait Generation using Reinforcement Learning Josep M Porta and Enric Celaya Institut de Robòtica i Informàtica Industrial, UPC-CSIC, Barcelona, Spain. SYNOPSIS The use of a free gait becomes
Keywords--Bio-Robots, Walking Robots, Locomotion and Stability Controlled Gait.
 Six Legged Locomotion on Uneven Terrain Kale Aparna S., Salunke Geeta D. kaleaparna5@gmail.com, geetasalunke@gmail.com Abstract -In this paper current state of many walking robots are compared and advantages
Six Legged Locomotion on Uneven Terrain Kale Aparna S., Salunke Geeta D. kaleaparna5@gmail.com, geetasalunke@gmail.com Abstract -In this paper current state of many walking robots are compared and advantages
Improvement of the Cheetah Locomotion Control
 Improvement of the Cheetah Locomotion Control Master Project - Midterm Presentation 3 rd November 2009 Student : Supervisor : Alexander Sproewitz Professor : Auke Jan Ijspeert Presentation of the Cheetah
Improvement of the Cheetah Locomotion Control Master Project - Midterm Presentation 3 rd November 2009 Student : Supervisor : Alexander Sproewitz Professor : Auke Jan Ijspeert Presentation of the Cheetah
TEN YEARS IN LOCOMOTION CONTROL RESEARCH
 TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
LOCOMOTION IN ALLIGATOR MISSISSIPPIENSIS: KINEMATIC EFFECTS OF SPEED AND POSTURE AND THEIR RELEVANCE TO THE SPRAWLING-TO-ERECT PARADIGM
 The Journal of Experimental Biology 201, 2559 2574 (1998) Printed in Great Britain The Company of Biologists Limited 1998 JEB1464 2559 LOCOMOTION IN ALLIGATOR MISSISSIPPIENSIS: KINEMATIC EFFECTS OF SPEED
The Journal of Experimental Biology 201, 2559 2574 (1998) Printed in Great Britain The Company of Biologists Limited 1998 JEB1464 2559 LOCOMOTION IN ALLIGATOR MISSISSIPPIENSIS: KINEMATIC EFFECTS OF SPEED
Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking with Flat Feet
 2 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July, 2 Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking
2 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July, 2 Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance
 Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking
 1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
3D Limit Cycle Walking of Musculoskeletal Humanoid Robot with Flat Feet
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA 3D Limit Cycle Walking of Musculoskeletal Humanoid Robot with Flat Feet Kenichi Narioka,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA 3D Limit Cycle Walking of Musculoskeletal Humanoid Robot with Flat Feet Kenichi Narioka,
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Toward a human-like biped robot with compliant legs
 Robotics and Autonomous Systems ( ) www.elsevier.com/locate/robot Toward a human-like biped robot with compliant legs Fumiya Iida a,b,c,, Yohei Minekawa a, Jürgen Rummel a, André Seyfarth a a Locomotion
Robotics and Autonomous Systems ( ) www.elsevier.com/locate/robot Toward a human-like biped robot with compliant legs Fumiya Iida a,b,c,, Yohei Minekawa a, Jürgen Rummel a, André Seyfarth a a Locomotion
PERCEPTIVE ROBOT MOVING IN 3D WORLD. D.E- Okhotsimsky, A.K. Platonov USSR
 PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
The Kinematics of Salamander Underwater Walking on Smooth and Rough Substrate
 The University of Akron IdeaExchange@UAkron Honors Research Projects The Dr. Gary B. and Pamela S. Williams Honors College Spring 2018 The Kinematics of Salamander Underwater Walking on Smooth and Rough
The University of Akron IdeaExchange@UAkron Honors Research Projects The Dr. Gary B. and Pamela S. Williams Honors College Spring 2018 The Kinematics of Salamander Underwater Walking on Smooth and Rough
Rotation Centers of the Equine Digit and their Use in Quantifying Conformation
 Presented at the Roth Kinematics Symposium, Stanford University, June 21, 2003. Rotation Centers of the Equine Digit and their Use in Quantifying Conformation John J. Craig, Phd ; Monique F. Craig, BSCE;
Presented at the Roth Kinematics Symposium, Stanford University, June 21, 2003. Rotation Centers of the Equine Digit and their Use in Quantifying Conformation John J. Craig, Phd ; Monique F. Craig, BSCE;
INSTANTANEOUS ON-LINE MODIFICATION OF BIPED WALK COMPOSED FROM RECONFIGURABLE ADAPTIVE MOTION PRIMITIVES
 THERMAL SCIENCE: Year 26, Vol. 2, Suppl. 2, pp. S53-S523 S53 INSTANTANEOUS ON-LINE MODIFICATION OF BIPED WALK COMPOSED FROM RECONFIGURABLE ADAPTIVE MOTION PRIMITIVES Introduction by Branislav A. BOROVAC
THERMAL SCIENCE: Year 26, Vol. 2, Suppl. 2, pp. S53-S523 S53 INSTANTANEOUS ON-LINE MODIFICATION OF BIPED WALK COMPOSED FROM RECONFIGURABLE ADAPTIVE MOTION PRIMITIVES Introduction by Branislav A. BOROVAC
Truba college of Engineering & Technology, Indore, India. Truba college of Engineering & Technology, Indore, India.
 IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY DESIGN AND DEVELOPMENT OF WALKING BIPEDAL ROBOT WITH THE HELP OF ARDUINO CONTROLLER Deepti Malviya*, Suman Sharma * Truba college
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY DESIGN AND DEVELOPMENT OF WALKING BIPEDAL ROBOT WITH THE HELP OF ARDUINO CONTROLLER Deepti Malviya*, Suman Sharma * Truba college
Locomotion Concepts. Autonomous Mobile Robots. Concepts Legged Locomotion Wheeled Locomotion. Autonomous Systems Lab. Zürich. Localization.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
The Effect of Von Karman Vortex Street on Building Ventilation
 The Effect of Von Karman Vortex Street on Building Ventilation P.Praveen Kumar Abstract This paper deals with the utilisation of the von Karman vortex street principle to maximise air flow into buildings.
The Effect of Von Karman Vortex Street on Building Ventilation P.Praveen Kumar Abstract This paper deals with the utilisation of the von Karman vortex street principle to maximise air flow into buildings.
Stable Upright Walking and Running using a simple Pendulum based Control Scheme
 1 Stable Upright Walking and Running using a simple Pendulum based Control Scheme H.-M. MAUS, J. RUMMEL and A. SEYFARTH Lauflabor Locomotion Laboratory, University of Jena, Germany E-mail: moritz.maus@uni-jena.de
1 Stable Upright Walking and Running using a simple Pendulum based Control Scheme H.-M. MAUS, J. RUMMEL and A. SEYFARTH Lauflabor Locomotion Laboratory, University of Jena, Germany E-mail: moritz.maus@uni-jena.de
RUNNING SPRINGS: SPEED AND ANIMAL SIZE
 J. exp. Biol. 185, 71 86 (1993) Printed in Great Britain The Company of Biologists Limited 1993 71 RUNNING SPRINGS: SPEED AND ANIMAL SIZE CLAIRE T. FARLEY 1, *, JAMES GLASHEEN 2 AND THOMAS A. MCMAHON 3
J. exp. Biol. 185, 71 86 (1993) Printed in Great Britain The Company of Biologists Limited 1993 71 RUNNING SPRINGS: SPEED AND ANIMAL SIZE CLAIRE T. FARLEY 1, *, JAMES GLASHEEN 2 AND THOMAS A. MCMAHON 3
Locomotion of lizards on inclines and perches: hindlimb kinematics of an arboreal specialist and a terrestrial generalist
 The Journal of Experimental iology 7, 33-8 Published by The Company of iologists doi:1.1/jeb.763 33 Locomotion of lizards on inclines and perches: hindlimb kinematics of an arboreal specialist and a terrestrial
The Journal of Experimental iology 7, 33-8 Published by The Company of iologists doi:1.1/jeb.763 33 Locomotion of lizards on inclines and perches: hindlimb kinematics of an arboreal specialist and a terrestrial
Walking and Running BACKGROUND REVIEW. Planar Pendulum. BIO-39 October 30, From Oct. 25, Equation of motion (for small θ) Solution is
 Solution is") Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
KOTARO SASAKI Curriculum Vitae
 KOTARO SASAKI Curriculum Vitae Department of Mechanical & Biomedical Engineering Boise State University 1910 University Dr. Boise ID 83725-2075 Phone: (208) 426-4027 Email: kosasaki@boisestate.edu EDUCATION
KOTARO SASAKI Curriculum Vitae Department of Mechanical & Biomedical Engineering Boise State University 1910 University Dr. Boise ID 83725-2075 Phone: (208) 426-4027 Email: kosasaki@boisestate.edu EDUCATION
Proof Copy. Controlling the Walking Period of a Pneumatic Muscle Walker. Takashi Takuma Koh Hosoda. Abstract. 1. Introduction
 Takashi Takuma Koh Hosoda Department of Adaptive Machine Systems Graduate School of Engineering, Osaka University Yamadaoka 2 1, Suita, Osaka 565 0871, Japan {takuma,hosoda}@ams.eng.osaka-u.ac.jp Controlling
Takashi Takuma Koh Hosoda Department of Adaptive Machine Systems Graduate School of Engineering, Osaka University Yamadaoka 2 1, Suita, Osaka 565 0871, Japan {takuma,hosoda}@ams.eng.osaka-u.ac.jp Controlling
Development of Fish type Robot based on the Analysis of Swimming Motion of Bluefin Tuna Comparison between Tuna-type Fin and Rectangular Fin -
 Development of Fish type Robot based on the Analysis of Swimming Motion of Bluefin Tuna Comparison between Tuna-type Fin and Rectangular Fin - Katsuya KUGAI* Abstract The swimming motion of Tuna type fishes
Development of Fish type Robot based on the Analysis of Swimming Motion of Bluefin Tuna Comparison between Tuna-type Fin and Rectangular Fin - Katsuya KUGAI* Abstract The swimming motion of Tuna type fishes
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING
 OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
SHUFFLE TURN OF HUMANOID ROBOT SIMULATION BASED ON EMG MEASUREMENT
 SHUFFLE TURN OF HUMANOID ROBOT SIMULATION BASED ON EMG MEASUREMENT MASANAO KOEDA, TAKAYUKI SERIZAWA, AND YUTA MATSUI Osaka Electro-Communication University, Faculty of Information Science and Arts, Department
SHUFFLE TURN OF HUMANOID ROBOT SIMULATION BASED ON EMG MEASUREMENT MASANAO KOEDA, TAKAYUKI SERIZAWA, AND YUTA MATSUI Osaka Electro-Communication University, Faculty of Information Science and Arts, Department
Design and Modeling of a Mobile Robot
 Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Human Pose Tracking III: Dynamics. David Fleet University of Toronto
 Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
Energetics Study of Mechanically Coupled Human Walking. Honors Undergraduate Thesis. the Undergraduate School of The Ohio State University
 Energetics Study of Mechanically Coupled Human Walking Honors Undergraduate Thesis Presented in partial fulfillment of the requirements for the degree Bachelor of Science in the Undergraduate School of
Energetics Study of Mechanically Coupled Human Walking Honors Undergraduate Thesis Presented in partial fulfillment of the requirements for the degree Bachelor of Science in the Undergraduate School of
Studying morphosis with a simulated model of the long-tailed lizard Takydromus sexlineatus: tail amputation
 Studying morphosis with a simulated model of the long-tailed lizard Takydromus sexlineatus: tail amputation Konstantinos Karakasiliotis Abstract Morphology is an important factor in locomotion. It may
Studying morphosis with a simulated model of the long-tailed lizard Takydromus sexlineatus: tail amputation Konstantinos Karakasiliotis Abstract Morphology is an important factor in locomotion. It may
DOWNLOAD OR READ : COMPARING LIMB STRUCTURE AND FUNCTION ANSWERS PDF EBOOK EPUB MOBI
 DOWNLOAD OR READ : COMPARING LIMB STRUCTURE AND FUNCTION ANSWERS PDF EBOOK EPUB MOBI Page 1 Page 2 comparing limb structure and function answers comparing limb structure and pdf comparing limb structure
DOWNLOAD OR READ : COMPARING LIMB STRUCTURE AND FUNCTION ANSWERS PDF EBOOK EPUB MOBI Page 1 Page 2 comparing limb structure and function answers comparing limb structure and pdf comparing limb structure
Designing Diving Beetle Inspired Underwater Robot(D.BeeBot)
") Designing Diving Beetle Inspired Underwater Robot(D.BeeBot) Hee Joong Kim Department of mechatronics engineering Chungnam National University Daejeon, Korea mainkhj@naver.com Jihong Lee Department of mechatronics
Designing Diving Beetle Inspired Underwater Robot(D.BeeBot) Hee Joong Kim Department of mechatronics engineering Chungnam National University Daejeon, Korea mainkhj@naver.com Jihong Lee Department of mechatronics
The Application of Human Body Models in SIMPACK
 The Application of Human Body Models in SIMPACK Dr. Valentin Keppler, Biomotion Solutions www.biomotion-solutions.com keppler@biomotion-solutions.com 4/15/2011 SIMPACK Usermeeting 2011 1 The Human Factor
The Application of Human Body Models in SIMPACK Dr. Valentin Keppler, Biomotion Solutions www.biomotion-solutions.com keppler@biomotion-solutions.com 4/15/2011 SIMPACK Usermeeting 2011 1 The Human Factor
Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis.
 Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis. D.Moser, N.Stech, J.McCarthy, G.Harris, S.Zahedi, A.McDougall Summary This study reports
Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis. D.Moser, N.Stech, J.McCarthy, G.Harris, S.Zahedi, A.McDougall Summary This study reports
Geometric Mechanics Applied to Tetrapod Locomotion on Granular Media
 Geometric Mechanics Applied to Tetrapod Locomotion on Granular Media Yasemin Ozkan Aydin 1(B), Baxi Chong 4, Chaohui Gong 4, Jennifer M. Rieser 1, Jeffery W. Rankin 2, Krijn Michel 2, Alfredo G. Nicieza
Geometric Mechanics Applied to Tetrapod Locomotion on Granular Media Yasemin Ozkan Aydin 1(B), Baxi Chong 4, Chaohui Gong 4, Jennifer M. Rieser 1, Jeffery W. Rankin 2, Krijn Michel 2, Alfredo G. Nicieza
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg. Abstract
 Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Body Stabilization of PDW toward Humanoid Walking
 Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Fish Biorobotics. Fishes as model systems for understanding aquatic propulsion. George V. Lauder Harvard University
 Fish Biorobotics Fishes as model systems for understanding aquatic propulsion 28,000 species of fishes Half of all vertebrates are fishes Fishes are 550 million years old Tremendous opportunity for selection
Fish Biorobotics Fishes as model systems for understanding aquatic propulsion 28,000 species of fishes Half of all vertebrates are fishes Fishes are 550 million years old Tremendous opportunity for selection
The importance of physical activity throughout an individual's life is indisputable. As healthcare
 What to Expect When They re Expecting: A Look at Biomechanical Changes in Walking/Running During Pregnancy Jennifer Bruer-Vandeweert, Megan Hotchkiss, Jamie Kronenberg, Kristin Olson Dr. Rumit Singh Kakar,
What to Expect When They re Expecting: A Look at Biomechanical Changes in Walking/Running During Pregnancy Jennifer Bruer-Vandeweert, Megan Hotchkiss, Jamie Kronenberg, Kristin Olson Dr. Rumit Singh Kakar,
MAXIMUM SPEED AND MECHANICAL POWER OUTPUT IN LIZARDS
 The Journal of Experimental Biology 2, 2189 2195 (1997) Printed in Great Britain The Company of Biologists Limited 1997 JEB77 2189 MAXIMUM SPEED AND MECHANICAL POWER OUTPUT IN LIZARDS CLAIRE T. FARLEY*
The Journal of Experimental Biology 2, 2189 2195 (1997) Printed in Great Britain The Company of Biologists Limited 1997 JEB77 2189 MAXIMUM SPEED AND MECHANICAL POWER OUTPUT IN LIZARDS CLAIRE T. FARLEY*
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots
 ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
H A E - W O N P A R K
 H A E - W O N P A R K Business Address Massachusetts Institute of Technology 5-017, 77 Massachusetts Avenue Cambridge, MA 02139-4307 (617) 715-4309; parkhw@mit.edu Home Address 2 Menlo Street Brighton,
H A E - W O N P A R K Business Address Massachusetts Institute of Technology 5-017, 77 Massachusetts Avenue Cambridge, MA 02139-4307 (617) 715-4309; parkhw@mit.edu Home Address 2 Menlo Street Brighton,
PROPER PITCHING MECHANICS
 PROPER PITCHING MECHANICS While each pitcher is a different person and can display some individuality in his mechanics, everyone has similar anatomy (the same muscles, bones and ligaments in the same locations)
PROPER PITCHING MECHANICS While each pitcher is a different person and can display some individuality in his mechanics, everyone has similar anatomy (the same muscles, bones and ligaments in the same locations)
GaitAnalysisofEightLegedRobot
 GaitAnalysisofEightLegedRobot Mohammad Imtiyaz Ahmad 1, Dilip Kumar Biswas 2 & S. S ROY 3 1&2 Department of Mechanical Engineering, National Institute of Technology, Durgapur 2 Technology Innovation Centre,
GaitAnalysisofEightLegedRobot Mohammad Imtiyaz Ahmad 1, Dilip Kumar Biswas 2 & S. S ROY 3 1&2 Department of Mechanical Engineering, National Institute of Technology, Durgapur 2 Technology Innovation Centre,
Megan E. Krause, BSBSE, Young Hui Chang, Ph.D. Comparative Neuromechanics Laboratory. Georgia Institute of Technology
 Megan E. Krause, BSBSE, Young Hui Chang, Ph.D. Comparative Neuromechanics Laboratory Sh School of Applied Physiology Georgia Institute of Technology 1 Variety of ankle constraints during locomotion: Fashion
Megan E. Krause, BSBSE, Young Hui Chang, Ph.D. Comparative Neuromechanics Laboratory Sh School of Applied Physiology Georgia Institute of Technology 1 Variety of ankle constraints during locomotion: Fashion
Neural Control and Learning for Versatile, Adaptive, Autonomous Behavior of Walking Machines
 Neural Control and Learning for Versatile, Adaptive, Autonomous Behavior of Walking Machines Poramate Manoonpong 1 and Florentin Wörgötter 2 Bernstein Center for Computational Neuroscience (BCCN), University
Neural Control and Learning for Versatile, Adaptive, Autonomous Behavior of Walking Machines Poramate Manoonpong 1 and Florentin Wörgötter 2 Bernstein Center for Computational Neuroscience (BCCN), University
Compliance for a cross four-bar knee joint
 Compliance for a cross four-bar knee joint Arnaud Hamon, Yannick Aoustin To cite this version: Arnaud Hamon, Yannick Aoustin. Compliance for a cross four-bar knee joint. The 14th International Conference
Compliance for a cross four-bar knee joint Arnaud Hamon, Yannick Aoustin To cite this version: Arnaud Hamon, Yannick Aoustin. Compliance for a cross four-bar knee joint. The 14th International Conference
Helping athletes with amputations reach their potential as they run the curves on the track: a Critically Appraised Topic review
 INTRODUCTION Clinical Question: Do athletes with unilateral right transtibial amputations have advantages resulting in faster race times compared to left transtibial amputations in competitive sprinting
INTRODUCTION Clinical Question: Do athletes with unilateral right transtibial amputations have advantages resulting in faster race times compared to left transtibial amputations in competitive sprinting
EVOLVING HEXAPOD GAITS USING A CYCLIC GENETIC ALGORITHM
 Evolving Hexapod Gaits Using a Cyclic Genetic Algorithm Page 1 of 7 EVOLVING HEXAPOD GAITS USING A CYCLIC GENETIC ALGORITHM GARY B. PARKER, DAVID W. BRAUN, AND INGO CYLIAX Department of Computer Science
Evolving Hexapod Gaits Using a Cyclic Genetic Algorithm Page 1 of 7 EVOLVING HEXAPOD GAITS USING A CYCLIC GENETIC ALGORITHM GARY B. PARKER, DAVID W. BRAUN, AND INGO CYLIAX Department of Computer Science
Where are we in understanding salamander locomotion: biological and robotic perspectives on kinematics
 DOI 10.1007/s00422-012-0540-4 REVIEW Where are we in understanding salamander locomotion: biological and robotic perspectives on kinematics Konstantinos Karakasiliotis Nadja Schilling Jean-Marie Cabelguen
DOI 10.1007/s00422-012-0540-4 REVIEW Where are we in understanding salamander locomotion: biological and robotic perspectives on kinematics Konstantinos Karakasiliotis Nadja Schilling Jean-Marie Cabelguen
The tale of the tail: limb function and locomotor mechanics in Alligator mississippiensis
 The Journal of Experimental Biology 27, 553-563 Published by The Company of Biologists 24 doi:1.1242/jeb.774 553 The tale of the tail: limb function and locomotor mechanics in Alligator mississippiensis
The Journal of Experimental Biology 27, 553-563 Published by The Company of Biologists 24 doi:1.1242/jeb.774 553 The tale of the tail: limb function and locomotor mechanics in Alligator mississippiensis
Exploring the Role of the Tail in Bipedal Hopping through Computational Evolution
 Exploring the Role of the Tail in Bipedal Hopping through Computational Evolution Jared M. Moore 1, Anne K. Gutmann 2, Craig P. McGowan 2, and Philip K. McKinley 1 1 Dept. Computer Science and Engineering,
Exploring the Role of the Tail in Bipedal Hopping through Computational Evolution Jared M. Moore 1, Anne K. Gutmann 2, Craig P. McGowan 2, and Philip K. McKinley 1 1 Dept. Computer Science and Engineering,
Comparing the Locomotion Dynamics of the Cockroach and a Shape Deposition Manufactured Biomimetic Hexapod
 Comparing the Locomotion Dynamics of the Cockroach and a Shape Deposition Manufactured Biomimetic Hexapod Sean A. Bailey, Jorge G. Cham, Mark R. Cutkosky Center for Design Research Stanford University
Comparing the Locomotion Dynamics of the Cockroach and a Shape Deposition Manufactured Biomimetic Hexapod Sean A. Bailey, Jorge G. Cham, Mark R. Cutkosky Center for Design Research Stanford University
Chimpanzee locomotor energetics and the origin of human bipedalism
 Chimpanzee locomotor energetics and the origin of human bipedalism Michael D. Sockol*, David A. Raichlen, and Herman Pontzer *Department of Anthropology, University of California, Davis, CA 95616; Department
Chimpanzee locomotor energetics and the origin of human bipedalism Michael D. Sockol*, David A. Raichlen, and Herman Pontzer *Department of Anthropology, University of California, Davis, CA 95616; Department
DETC DESIGN OPTIMIZATION OF A NOVEL TRIPEDAL LOCOMOTION ROBOT THROUGH SIMULATION AND EXPERIMENTS FOR A SINGLE STEP DYNAMIC GAIT
 Proceedings of the ASME 27 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 27 September 4-7, 27, Las Vegas, Nevada, USA DETC27-34472
Proceedings of the ASME 27 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 27 September 4-7, 27, Las Vegas, Nevada, USA DETC27-34472
Equine Trust Summer Scholarship
 Development of 3D gait model Student: Nicola Wichtel Supervisor: Dr Robert Colborne Equine Trust Summer Scholarship In 2015, The Equine Trust funded the purchase of a 6-camera infrared kinematic system
Development of 3D gait model Student: Nicola Wichtel Supervisor: Dr Robert Colborne Equine Trust Summer Scholarship In 2015, The Equine Trust funded the purchase of a 6-camera infrared kinematic system
WHATCOM COUNTY AMPHIBIAN MONITORING PROJECT AMPHIBIAN GUIDE PART 2: SALAMANDERS
 WHATCOM COUNTY AMPHIBIAN MONITORING PROJECT AMPHIBIAN GUIDE PART 2: SALAMANDERS Four families of salamanders (Caudata) are found in western Washington, with the following six species occurring in Whatcom
WHATCOM COUNTY AMPHIBIAN MONITORING PROJECT AMPHIBIAN GUIDE PART 2: SALAMANDERS Four families of salamanders (Caudata) are found in western Washington, with the following six species occurring in Whatcom
Data-Informed Modeling of Milligram-Scale Quadrupedal Robot Locomotion
 Data-Informed Modeling of Milligram-Scale Quadrupedal Robot Locomotion Walker Gosrich, Ryan St. Pierre, and Sarah Bergbreiter Abstract This work uses the microquad, a quadrupedal, magnetically actuated
Data-Informed Modeling of Milligram-Scale Quadrupedal Robot Locomotion Walker Gosrich, Ryan St. Pierre, and Sarah Bergbreiter Abstract This work uses the microquad, a quadrupedal, magnetically actuated
Design Solutions for Human Legs Motion Assistance Exoskeletons
 Proceedings of the World Congress on Engineering 28 Vol II WCE 28, July -, 28, London, U.K. Design Solutions for Human Legs Motion Assistance Exoskeletons Ionut Daniel Geonea, Nicolae Dumitru, Paul Rinderu
Proceedings of the World Congress on Engineering 28 Vol II WCE 28, July -, 28, London, U.K. Design Solutions for Human Legs Motion Assistance Exoskeletons Ionut Daniel Geonea, Nicolae Dumitru, Paul Rinderu
Biomimetic Design and Optimal Swing of a Hexapod Robot Leg
 Journal of Bionic Engineering 11 (2014) 26 35 Biomimetic Design and Optimal Swing of a Hexapod Robot Leg Jie Chen, Yubin Liu, Jie Zhao, He Zhang, Hongzhe Jin State Key Laboratory of Robotics and System,
Journal of Bionic Engineering 11 (2014) 26 35 Biomimetic Design and Optimal Swing of a Hexapod Robot Leg Jie Chen, Yubin Liu, Jie Zhao, He Zhang, Hongzhe Jin State Key Laboratory of Robotics and System,
LEG DESIGN IN HEXAPEDAL RUNNERS
 J. exp. Biol. 158, 369-390 (1991) 369 Primed in Great Britain The Company of Biologists Limited 1991 LEG DESIGN IN HEXAPEDAL RUNNERS BY R. J. FULL 1, R. BLICKHAN 2 AND L. H. TING 1 1 Department of Integrative
J. exp. Biol. 158, 369-390 (1991) 369 Primed in Great Britain The Company of Biologists Limited 1991 LEG DESIGN IN HEXAPEDAL RUNNERS BY R. J. FULL 1, R. BLICKHAN 2 AND L. H. TING 1 1 Department of Integrative
GAIT PARAMETER ADAPTATION TO ENVIRONMENTAL PERTURBATIONS IN QUADRUPEDAL ROBOTS
 May 25, 27 13:6 WSPC - Proceeings Trim Size: 9in x 6in clawar7 1 GAIT PARAMETER ADAPTATION TO ENVIRONMENTAL PERTURBATIONS IN QUADRUPEDAL ROBOTS E. GARCIA, J. ESTREMERA, P. GONZALEZ DE SANTOS an M. ARMADA
May 25, 27 13:6 WSPC - Proceeings Trim Size: 9in x 6in clawar7 1 GAIT PARAMETER ADAPTATION TO ENVIRONMENTAL PERTURBATIONS IN QUADRUPEDAL ROBOTS E. GARCIA, J. ESTREMERA, P. GONZALEZ DE SANTOS an M. ARMADA
A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY
 Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Journal of Sound and Vibration (1998) 17(1), 17 31 Article No. sv981733 A NEW GOLF-SWING ROBOT MODEL UTILIZING SHAFT ELASTICITY S. SUZUKI Department of Mechanical System Engineering, Kitami Institute of
Learning Energy Efficient Walking Based on Ballistics
 Learning Energy Efficient Walking Based on Ballistics Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center ogino@er.ams.eng.osaka-u.ac.jp,
Learning Energy Efficient Walking Based on Ballistics Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center ogino@er.ams.eng.osaka-u.ac.jp,
Simulation-based design to reduce metabolic cost
 Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices