TEN YEARS IN LOCOMOTION CONTROL RESEARCH
|
|
|
- Herbert Martin
- 5 years ago
- Views:
Transcription
1 TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University
![[SIGGRAPH 2010] Lee et](/docs-images/91/106441023/images/2-0.jpg "al, Data-driven biped")
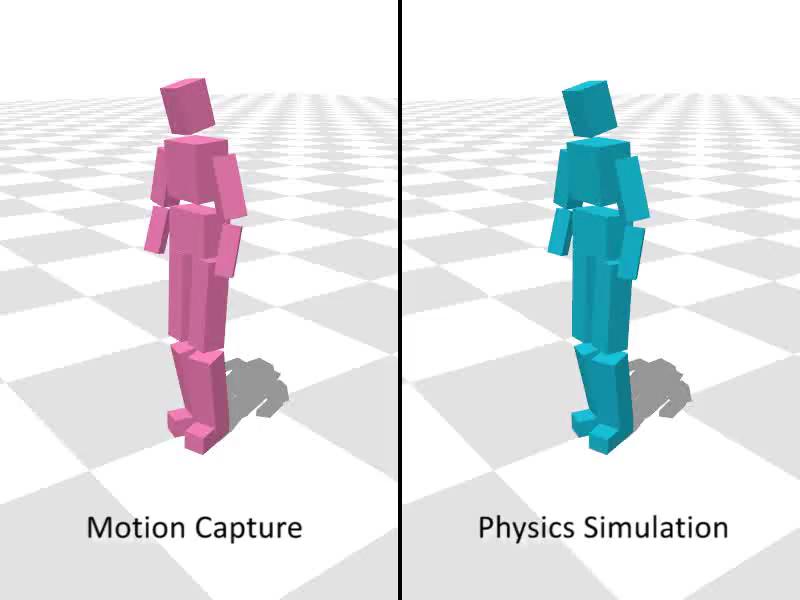
2 [SIGGRAPH 2010] Lee et al, Data-driven biped control
![[SIGGRAPH 2010] Lee et](/docs-images/91/106441023/images/3-0.jpg "al, Data-driven biped")
3 [SIGGRAPH 2010] Lee et al, Data-driven biped control
4 [SIGGRAPH 2010] Lee et al, Data-driven biped control

5 Hubo
6 Before 2007 After 2007 Simplified dynamics Model Fullbody dynamics Feedback only (stereotyped robotic walking) Feedback and feedforward (motion capture references) Analytic balance strategy Learning from experience Derivative-based optimization (conjugate-gradient, Newton, BFGS, ) Derivative-free optimization (CMA-ES)
7 Before 2007 After 2007 Simplified dynamics Model (inverted pendulum) Fullbody dynamics Feedback only (stereotyped robotic walking) Feedback and feedforward (motion capture references) Analytic balance strategy Computational model of balancing (regression, learning from experience, optimization at runtime) Derivative-based optimization (conjugate-gradient, Newton, BFGS, ) Derivative-free optimization (CMA-ES)
8 [SIGGRAPH 2007] Sok et al, Simulating Biped Behaviors from Human Motion Data
![[SIGGRAPH 2010] Lee et](/docs-images/91/106441023/images/9-0.jpg "al, Data-driven biped")
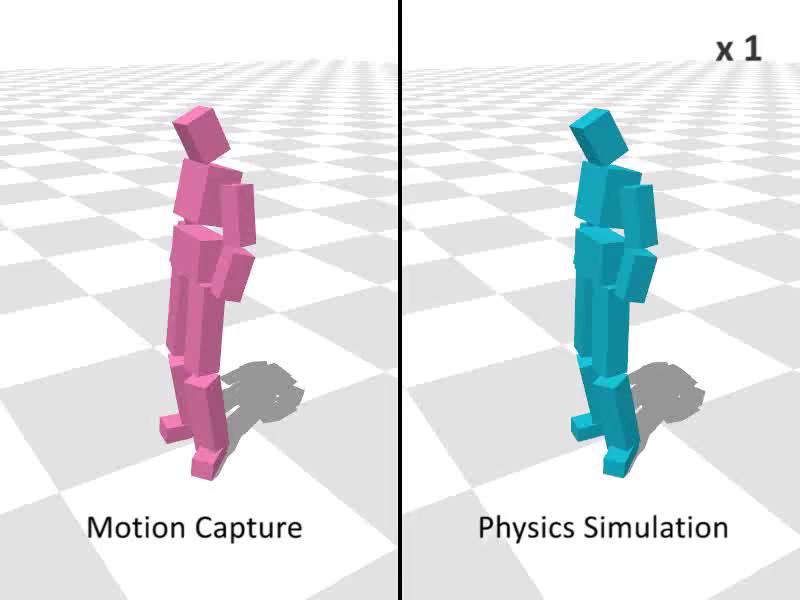
9 [SIGGRAPH 2010] Lee et al, Data-driven biped control
10
11
 Derivative-based optimization (conjugate-gradient, Newton, BFGS, ) Derivative-free")
12 Before 2007 After 2007 Simplified dynamics Model (inverted pendulum) Fullbody dynamics Feedback only (stereotyped robotic walking) Feedback and feedforward (motion capture references) Analytic balance strategy Computational model of balancing (regression, learning from experience, optimization at runtime) Derivative-based optimization (conjugate-gradient, Newton, BFGS, ) Derivative-free optimization (CMA-ES)
13 Plausibility of Simulation Physical Correctness The simulation is correct with respect to Newton s law of motion No fictional force applies to the body Admissible Control Control force/torques are valid within muscle capacity GRF (ground reaction force) consistent with control force/torque
14 Plausibility of Simulation Type I (Strongly admissible) Simulation is physically correct and control is admissible Type II (weakly admissible) Simulation is physically correct, but control may not be admissible ex) GRFs are computed as optimization parameters independent of joint torques Type III (Visually plausible) Physical correctness is not guaranteed ex) Fictional force may apply at contact points
15 Dynamics Energertic Stability Balance Agility Low-energy Muscle Skin Tendon Modeling Pertubation Static Skeleton Applications Gait Analysis Humanoid Robot Robustness Video Games Biological Motion Simulation Social Group Quadruped Biped Emotion Fatigue Aging Adapation High-Level Behavior Interaction Flying Type
16 Dynamics Energertic Stability Balance Agility Low-energy Muscle Skin Tendon Modeling Pertubation Static Skeleton Applications Gait Analysis Humanoid Robot Robustness Video Games Biological Motion Simulation Social Group Quadruped Biped Emotion Fatigue Aging Adapation High-Level Behavior Interaction Flying Type
 [SIGGRAPH Asia 2014] Lee et al, Many-Muscle")
17 L Gait2562 (25 DOFs, 62 muscles) Gait2592 (25 DOFs, 92 muscles) Fullbody (39 DOFs, 120 muscles) [SIGGRAPH Asia 2014] Lee et al, Many-Muscle Humanoids
![[SIGGRAPH Asia 2014] Lee et](/docs-images/91/106441023/images/18-0.jpg "al, Many-Muscle Humanoids")
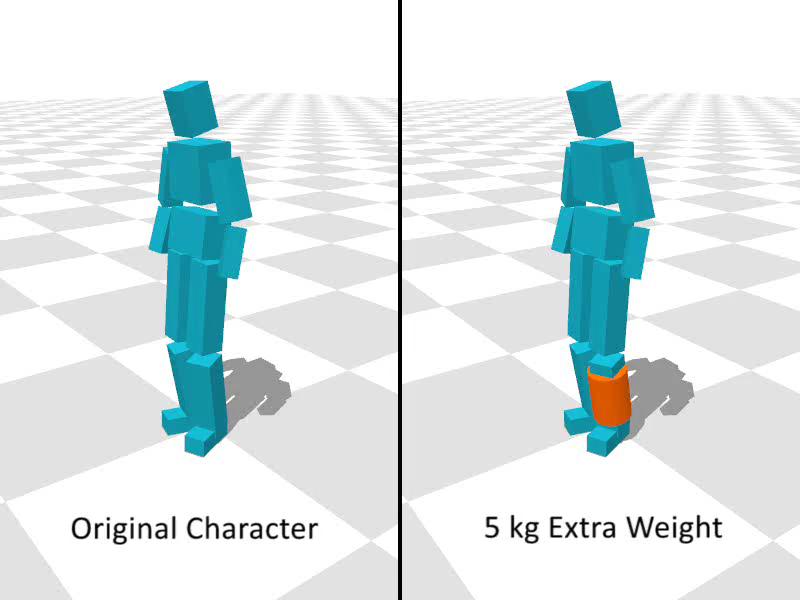
18 [SIGGRAPH Asia 2014] Lee et al, Many-Muscle Humanoids 18
19 Dynamics Energertic Stability Balance Agility Low-energy Muscle Skin Tendon Modeling Pertubation Static Skeleton Applications Gait Analysis Humanoid Robot Robustness Video Games Biological Motion Simulation Social Group Quadruped Biped Emotion Fatigue Aging Adapation High-Level Behavior Interaction Flying Type
20
21 Unilateral Painful Ankle Plantar Flexor Patients tend to reduce the use of the ankle plantar flexors
22
23 Painful Joints on Unilateral Limb Patients tend to reduce contact force
24
25 Painful Left Ankle Plantar Flexor Painful Joints on Left Leg
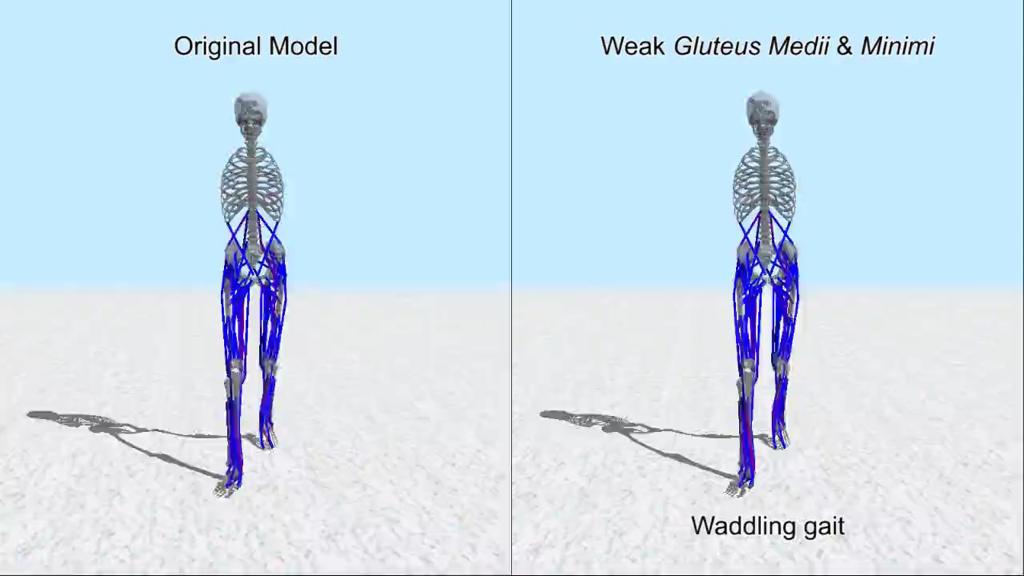
26 Waddling Gait Bilateral Gluteus Medius & Minimus Weakness Upper body swing laterally
27
28 Trendelenburg Gait Unilateral Gluteus Medius & Minimus Weakness
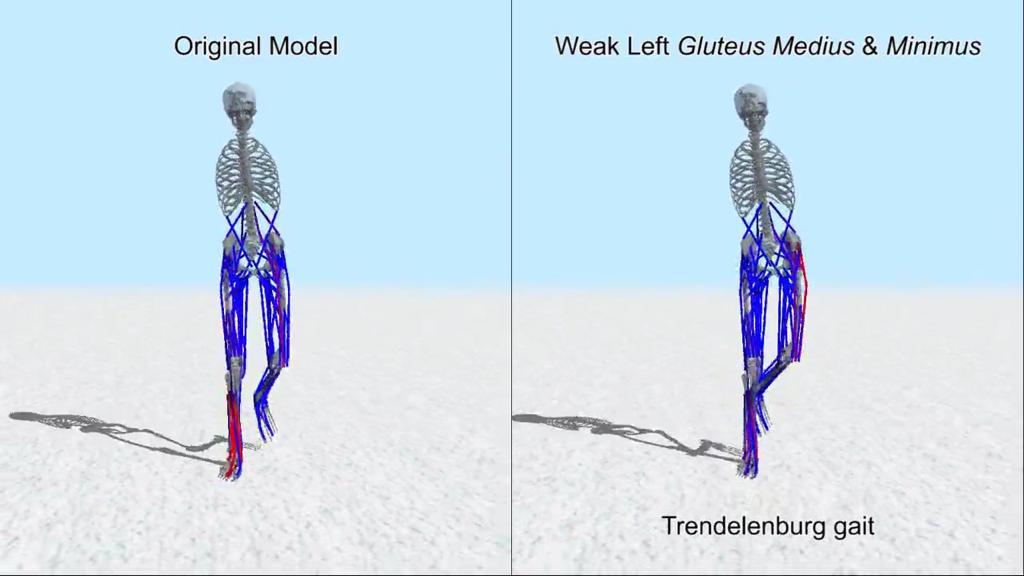
29
30 Dynamics Energertic Stability Balance Agility Low-energy Muscle Skin Tendon Modeling Pertubation Static Skeleton Applications Gait Analysis Humanoid Robot Robustness Video Games Biological Motion Simulation Social Group Quadruped Biped Emotion Fatigue Aging Adapation High-Level Behavior Interaction Flying Type
31 Balance and Stability Under what conditions is human gait more stable? What factors affect the level of stability? Are simulated walking as stable as human walking? Do the factors that affect human gait also influence controller stability?
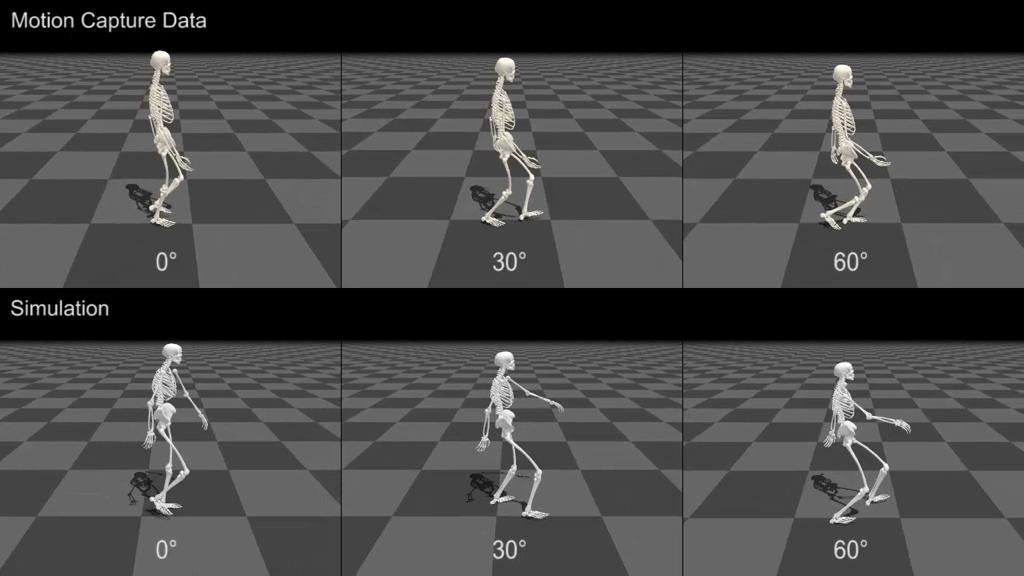
![[SIGGRAPH Asia 2015] Lee et](/docs-images/91/106441023/images/32-0.jpg "al, Push-Recovery Stability")
32 [SIGGRAPH Asia 2015] Lee et al, Push-Recovery Stability
33
34 Four factors that affect gait stability Level of crouch Walking speed Magnitude of push Timing of push Crouch Gait is more stable than Normal Gait It detours less if it walks faster, push is weaker, and push happens later in the swing phase Similar trends for humans and simulation
35 Applications in Clinical Gait Analysis Surgery improves cerebral palsy gait by lengthening tight muscles/tendons and fixing bone deformity Predictive simulation of post-operative gaits from pre-operative motion capture and surgery planning
36 Dynamics Energertic Stability Balance Agility Low-energy Muscle Skin Tendon Modeling Pertubation Static Skeleton Applications Gait Analysis Humanoid Robot Robustness Video Games Biological Motion Simulation Social Group Quadruped Biped Emotion Fatigue Aging Adapation High-Level Behavior Interaction Flying Type

37 Papers & Videos are available at
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Spasticity in gait. Wessex ACPIN Spasticity Presentation Alison Clarke
 Spasticity in gait Clinicians recognise spasticity but the elements of spasticity contributing to gait patterns are often difficult to identify: Variability of muscle tone Observation/recording General
Spasticity in gait Clinicians recognise spasticity but the elements of spasticity contributing to gait patterns are often difficult to identify: Variability of muscle tone Observation/recording General
Mobile Robots (Legged) (Take class notes)
 (Take class notes)") Mobile Robots (Legged) (Take class notes) Legged mobile robots Mobile robots are robots which can move There are two types of mobile robots - Legged two, four, six and eight legs - Wheeled one, two, three
Mobile Robots (Legged) (Take class notes) Legged mobile robots Mobile robots are robots which can move There are two types of mobile robots - Legged two, four, six and eight legs - Wheeled one, two, three
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL
 1 INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern Kaiserslautern, Germany E-mail: luksch@informatik.uni-kl.de
1 INITIATING NORMAL WALKING OF A DYNAMIC BIPED WITH A BIOLOGICALLY MOTIVATED CONTROL T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern Kaiserslautern, Germany E-mail: luksch@informatik.uni-kl.de
Normal and Abnormal Gait
 Normal and Abnormal Gait Adrielle Fry, MD EvergreenHealth, Division of Sport and Spine University of Washington Board Review Course March 6, 2017 What are we going to cover? Definitions and key concepts
Normal and Abnormal Gait Adrielle Fry, MD EvergreenHealth, Division of Sport and Spine University of Washington Board Review Course March 6, 2017 What are we going to cover? Definitions and key concepts
Gait. Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa
 Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Normal and Pathological Gait
 Normal and Pathological Gait Introduction Human gait locomotion Bipedal, biphasic forward propulsion of centre of gravity of the human body, in which there are alternate sinuous movements of different
Normal and Pathological Gait Introduction Human gait locomotion Bipedal, biphasic forward propulsion of centre of gravity of the human body, in which there are alternate sinuous movements of different
Sample Solution for Problem 1.a
 Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Modeling Human Movement
 CS 4732: Computer Animation Modeling Human Movement Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Modeling Human Movement: It s Hard!
CS 4732: Computer Animation Modeling Human Movement Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Modeling Human Movement: It s Hard!
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots
 ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
Walking and Running BACKGROUND REVIEW. Planar Pendulum. BIO-39 October 30, From Oct. 25, Equation of motion (for small θ) Solution is
 Solution is") Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF
 Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF George Chen May 17, 2002 Stanford Neuromuscular Biomechanics Lab Group Muscle contribution
Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF George Chen May 17, 2002 Stanford Neuromuscular Biomechanics Lab Group Muscle contribution
Brian Snyder MD/PhD Children s Hospital Harvard Medical School
 Brian Snyder MD/PhD Children s Hospital Harvard Medical School Observe patient s gait pattern as walk into room Systematic musculoskeletal exam (range of motion, joint alignment while standing) Neurologic
Brian Snyder MD/PhD Children s Hospital Harvard Medical School Observe patient s gait pattern as walk into room Systematic musculoskeletal exam (range of motion, joint alignment while standing) Neurologic
Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking with Flat Feet
 2 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July, 2 Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking
2 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July, 2 Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking
Robots With Legs. Helge Wrede
 Robots With Legs Helge Wrede 27.11.2017 Outline Motivation Overview Properties Number of legs Balance Walking Basic Bipedal Implementation Dynamic Balancing Concepts 3D-LIPM 2 Motivation Figure: Side view
Robots With Legs Helge Wrede 27.11.2017 Outline Motivation Overview Properties Number of legs Balance Walking Basic Bipedal Implementation Dynamic Balancing Concepts 3D-LIPM 2 Motivation Figure: Side view
Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
A bit of background. Session Schedule 3:00-3:10: Introduction & session overview. Overarching research theme: CPTA
 A Cognitive-Biomechanical Perspective for the Management of Common Chronic Musculoskeletal Conditions Skulpan Asavasopon, PT, PhD Loma Linda University Christopher M. Powers, PT, PhD, FAPTA University
A Cognitive-Biomechanical Perspective for the Management of Common Chronic Musculoskeletal Conditions Skulpan Asavasopon, PT, PhD Loma Linda University Christopher M. Powers, PT, PhD, FAPTA University
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Gait analysis for the development of the biped robot foot structure
 Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Positive running posture sums up the right technique for top speed
 Positive running, a model for high speed running Frans Bosch positive running posture sums up the right technique for top speed building blocks in running: Pelvic rotation for- and backward and hamstring
Positive running, a model for high speed running Frans Bosch positive running posture sums up the right technique for top speed building blocks in running: Pelvic rotation for- and backward and hamstring
Posture influences ground reaction force: implications for crouch gait
 University of Tennessee, Knoxville From the SelectedWorks of Jeffrey A. Reinbolt July 14, 2010 Posture influences ground reaction force: implications for crouch gait H. X. Hoang Jeffrey A. Reinbolt, University
University of Tennessee, Knoxville From the SelectedWorks of Jeffrey A. Reinbolt July 14, 2010 Posture influences ground reaction force: implications for crouch gait H. X. Hoang Jeffrey A. Reinbolt, University
Data Driven Computational Model for Bipedal Walking and Push Recovery
 Data Driven Computational Model for Bipedal Walking and Push Recovery A thesis Submitted In Partial Fulfillment of the Requirements for the Degree of Philosophy Vijay Bhaskar Semwal RS139 Under the supervision
Data Driven Computational Model for Bipedal Walking and Push Recovery A thesis Submitted In Partial Fulfillment of the Requirements for the Degree of Philosophy Vijay Bhaskar Semwal RS139 Under the supervision
Journal of Chemical and Pharmaceutical Research, 2016, 8(6): Research Article. Walking Robot Stability Based on Inverted Pendulum Model
: Research Article. Walking Robot Stability Based on Inverted Pendulum Model") Available online www.jocpr.com Journal of Chemical and Pharmaceutical Research, 2016, 8(6):463-467 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Walking Robot Stability Based on Inverted Pendulum
Available online www.jocpr.com Journal of Chemical and Pharmaceutical Research, 2016, 8(6):463-467 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Walking Robot Stability Based on Inverted Pendulum
Spider Robot for Motion with Quasistatic. Force Constraints
 Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
Running Injuries in Adolescents Jeffrey Shilt, M.D. Part 1 Page 1
 Running Injuries in Adolescents Jeffrey Shilt, M.D. Chief Surgical Officer, The Woodlands, Texas Children's Hospital Associate Professor, Orthopedic and Scoliosis Surgery, Baylor College of Medicine Part
Running Injuries in Adolescents Jeffrey Shilt, M.D. Chief Surgical Officer, The Woodlands, Texas Children's Hospital Associate Professor, Orthopedic and Scoliosis Surgery, Baylor College of Medicine Part
Locomotion Concepts. Autonomous Mobile Robots. Concepts Legged Locomotion Wheeled Locomotion. Autonomous Systems Lab. Zürich. Localization.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
10/24/2016. The Puzzle of Pain NMT and the Dynamic Foot Judith DeLany, LMT. Judith DeLany, LMT. NMTCenter.com. NMTCenter.com
 The Puzzle of Pain NMT and the Dynamic Foot Judith DeLany, LMT NMTCenter.com Judith DeLany, LMT NMTCenter.com Define gait cycle and its periods Consider key elements in gait Discuss foot design Consequences
The Puzzle of Pain NMT and the Dynamic Foot Judith DeLany, LMT NMTCenter.com Judith DeLany, LMT NMTCenter.com Define gait cycle and its periods Consider key elements in gait Discuss foot design Consequences
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Trajectory Planning and Motion Simulation for a Hydraulic Actuated Biped Robot
 Research Journal of Applied Sciences, Engineering and Technology 5(0): 3004-3009, 203 ISSN: 2040-7459; e-issn: 2040-7467 Maxwell Scientific Organization, 203 Submitted: September 6, 202 Accepted: November
Research Journal of Applied Sciences, Engineering and Technology 5(0): 3004-3009, 203 ISSN: 2040-7459; e-issn: 2040-7467 Maxwell Scientific Organization, 203 Submitted: September 6, 202 Accepted: November
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Assessments SIMPLY GAIT. Posture and Gait. Observing Posture and Gait. Postural Assessment. Postural Assessment 6/28/2016
 Assessments 2 SIMPLY GAIT Understanding movement Evaluations of factors that help therapist form professional judgments Include health, palpatory, range of motion, postural, and gait assessments Assessments
Assessments 2 SIMPLY GAIT Understanding movement Evaluations of factors that help therapist form professional judgments Include health, palpatory, range of motion, postural, and gait assessments Assessments
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg. Abstract
 Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Gait Analysis at Your Fingertips:
 Gait Analysis at Your Fingertips: Enhancing Observational Gait Analysis Using Mobile Device Technology and the Edinburgh Visual Gait Scale Jon R. Davids, MD; Shriners Hospitals for Children Northern California;
Gait Analysis at Your Fingertips: Enhancing Observational Gait Analysis Using Mobile Device Technology and the Edinburgh Visual Gait Scale Jon R. Davids, MD; Shriners Hospitals for Children Northern California;
Using sensory feedback to improve locomotion performance of the salamander robot in different environments
 Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING
 OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
Human Pose Tracking III: Dynamics. David Fleet University of Toronto
 Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
-Elastic strain energy (duty factor decreases at higher speeds). Higher forces act on feet. More tendon stretch. More energy stored in tendon.
. Higher forces act on feet. More tendon stretch. More energy stored in tendon.") As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
Supplementary Figure S1
 Supplementary Figure S1: Anterior and posterior views of the marker set used in the running gait trials. Forty-six markers were attached to the subject (15 markers on each leg, 4 markers on each arm, and
Supplementary Figure S1: Anterior and posterior views of the marker set used in the running gait trials. Forty-six markers were attached to the subject (15 markers on each leg, 4 markers on each arm, and
INTRODUCTION TO GAIT ANALYSIS DATA
 INTRODUCTION TO GAIT ANALYSIS DATA 1. Phases of gait a. Stance (% gc) i. Loading response (10%) ii. Mid- and terminal stance (%) iii. Pre-swing (10%) b. Swing (% gc) i. Initial swing ii. Mid-swing iii.
INTRODUCTION TO GAIT ANALYSIS DATA 1. Phases of gait a. Stance (% gc) i. Loading response (10%) ii. Mid- and terminal stance (%) iii. Pre-swing (10%) b. Swing (% gc) i. Initial swing ii. Mid-swing iii.
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Stable Upright Walking and Running using a simple Pendulum based Control Scheme
 1 Stable Upright Walking and Running using a simple Pendulum based Control Scheme H.-M. MAUS, J. RUMMEL and A. SEYFARTH Lauflabor Locomotion Laboratory, University of Jena, Germany E-mail: moritz.maus@uni-jena.de
1 Stable Upright Walking and Running using a simple Pendulum based Control Scheme H.-M. MAUS, J. RUMMEL and A. SEYFARTH Lauflabor Locomotion Laboratory, University of Jena, Germany E-mail: moritz.maus@uni-jena.de
Gait Analysis of a Little Biped Robot. Received May 2015; accepted July 2015
 ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
Generalized Biped Walking Control
 Generalized Biped Walking Control Stelian Coros Philippe Beaudoin Michiel van de Panne University of British Columbia Figure 1: Real-time physics-based simulation of walking. The method provides robust
Generalized Biped Walking Control Stelian Coros Philippe Beaudoin Michiel van de Panne University of British Columbia Figure 1: Real-time physics-based simulation of walking. The method provides robust
Rugby Strength Coach. Speed development guide
 Rugby Strength Coach Speed development guide Outline Why do Newton's laws of motion matter? What is speed? The technique and physical demands of speed Speed training parameters Rugby specific speed training
Rugby Strength Coach Speed development guide Outline Why do Newton's laws of motion matter? What is speed? The technique and physical demands of speed Speed training parameters Rugby specific speed training
3D Limit Cycle Walking of Musculoskeletal Humanoid Robot with Flat Feet
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA 3D Limit Cycle Walking of Musculoskeletal Humanoid Robot with Flat Feet Kenichi Narioka,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA 3D Limit Cycle Walking of Musculoskeletal Humanoid Robot with Flat Feet Kenichi Narioka,
Robot Walking with Genetic Algorithms
 Robot Walking with Genetic Algorithms Bente Reichardt 14. December 2015 Bente Reichardt 1/52 Outline Introduction Genetic algorithms Quadruped Robot Hexapod Robot Biped Robot Evaluation Bente Reichardt
Robot Walking with Genetic Algorithms Bente Reichardt 14. December 2015 Bente Reichardt 1/52 Outline Introduction Genetic algorithms Quadruped Robot Hexapod Robot Biped Robot Evaluation Bente Reichardt
WalkOn product range. Dynamic Ankle-Foot Orthoses. Information for specialist dealers
 WalkOn product range Dynamic Ankle-Foot Orthoses Information for specialist dealers WalkOn Flex WalkOn WalkOn Trimable WalkOn Reaction WalkOn Reaction plus One range Many different applications The WalkOn
WalkOn product range Dynamic Ankle-Foot Orthoses Information for specialist dealers WalkOn Flex WalkOn WalkOn Trimable WalkOn Reaction WalkOn Reaction plus One range Many different applications The WalkOn
Human Gait. 1 Exceptions include frogs and toads, who have biped gait, though it is unlike human gait
 Human Gait Kinesiology, as well as motion picture photography of human subjects at rest and in motion, is required for a detailed study and application of the knowledge of human gait. For an average clinician
Human Gait Kinesiology, as well as motion picture photography of human subjects at rest and in motion, is required for a detailed study and application of the knowledge of human gait. For an average clinician
Stabilization of a Three-Dimensional Limit Cycle Walking Model through Step-to-Step Ankle Control
 2013 IEEE International Conference on Rehabilitation Robotics June 24-26, 2013 Seattle, Washington USA Stabilization of a Three-Dimensional Limit Cycle Walking Model through Step-to-Step Ankle Control
2013 IEEE International Conference on Rehabilitation Robotics June 24-26, 2013 Seattle, Washington USA Stabilization of a Three-Dimensional Limit Cycle Walking Model through Step-to-Step Ankle Control
Principles of energetics and stability in human locomotion
 Principles of energetics and stability in human locomotion Jeremy D Wong 1, J Maxwell Donelan 1 People are skilled walkers and runners. We move with economy, agility and speed, and can do so even while
Principles of energetics and stability in human locomotion Jeremy D Wong 1, J Maxwell Donelan 1 People are skilled walkers and runners. We move with economy, agility and speed, and can do so even while
Design Of A Running Robot And The Effects Of Foot Placement In The Transverse Plane
 Purdue University Purdue e-pubs Open Access Theses Theses and Dissertations 2013 Design Of A Running Robot And The Effects Of Foot Placement In The Transverse Plane Timothy James Sullivan Purdue University,
Purdue University Purdue e-pubs Open Access Theses Theses and Dissertations 2013 Design Of A Running Robot And The Effects Of Foot Placement In The Transverse Plane Timothy James Sullivan Purdue University,
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2
 Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Compliance Control for Biped Walking on Rough Terrain
 Compliance Control for Biped Walking on Rough Terrain Masaki Ogino 1,2, Hiroyuki Toyama 2 Sawa Fuke 1,2, Norbert Michael Mayer 1,2, Ayako Watanabe 2, and Minoru Asada 1,2 1 JST ERATO Asada Project, Yamada-oka
Compliance Control for Biped Walking on Rough Terrain Masaki Ogino 1,2, Hiroyuki Toyama 2 Sawa Fuke 1,2, Norbert Michael Mayer 1,2, Ayako Watanabe 2, and Minoru Asada 1,2 1 JST ERATO Asada Project, Yamada-oka
Jurassic Chicken: An Avian Bipedal Robot 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, FAMU-FSU College of Engineering
 Jurassic Chicken: An Avian Bipedal Robot 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, FAMU-FSU College of Engineering Megan Grimm Machine Intelligence Lab (MIL) Email: megan@mil.ufl.edu
Jurassic Chicken: An Avian Bipedal Robot 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, FAMU-FSU College of Engineering Megan Grimm Machine Intelligence Lab (MIL) Email: megan@mil.ufl.edu
Normal Gait. Definitions. Definitions Analysis of Stance Phase Analysis of Swing Phase Additional Determinants of Gait Abnormal Gait.
 Normal Gait Definitions Analysis of Stance Phase Analysis of Swing Phase Additional Determinants of Gait Abnormal Gait Muscular Weakness/Paralysis Joint/Muscle ROM Limitation Neurologic Involvement Pain
Normal Gait Definitions Analysis of Stance Phase Analysis of Swing Phase Additional Determinants of Gait Abnormal Gait Muscular Weakness/Paralysis Joint/Muscle ROM Limitation Neurologic Involvement Pain
PURPOSE. METHODS Design
 7 Murrary, M.P.; Sepic, S.B.; Gardner, G.M.; and Mollinger, L.A., "Gait patterns of above-knee amputees using constant-friction knee components," Bull Prosthet Res, 17(2):35-45, 1980. 8 Godfrey, C.M.;
7 Murrary, M.P.; Sepic, S.B.; Gardner, G.M.; and Mollinger, L.A., "Gait patterns of above-knee amputees using constant-friction knee components," Bull Prosthet Res, 17(2):35-45, 1980. 8 Godfrey, C.M.;
Modifying the MIT Sensorimotor Control Lab model of human balance and gait control for the addition of running. Ellen Cappo
 Modifying the MIT Sensorimotor Control Lab model of human balance and gait control for the addition of running by Ellen Cappo SUBMITTED TO THE DEPARTMENT OF MECHANICAL ENGINEERING IN PARTIAL FULFILLMENT
Modifying the MIT Sensorimotor Control Lab model of human balance and gait control for the addition of running by Ellen Cappo SUBMITTED TO THE DEPARTMENT OF MECHANICAL ENGINEERING IN PARTIAL FULFILLMENT
Proof Copy. Controlling the Walking Period of a Pneumatic Muscle Walker. Takashi Takuma Koh Hosoda. Abstract. 1. Introduction
 Takashi Takuma Koh Hosoda Department of Adaptive Machine Systems Graduate School of Engineering, Osaka University Yamadaoka 2 1, Suita, Osaka 565 0871, Japan {takuma,hosoda}@ams.eng.osaka-u.ac.jp Controlling
Takashi Takuma Koh Hosoda Department of Adaptive Machine Systems Graduate School of Engineering, Osaka University Yamadaoka 2 1, Suita, Osaka 565 0871, Japan {takuma,hosoda}@ams.eng.osaka-u.ac.jp Controlling
EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT
 EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT PROJECT REFERENCE NO. : 37S0925 COLLEGE : NEW HORIZON COLLEGE OF ENGINEERING, BANGALORE BRANCH : MECHANICAL ENGINEERING GUIDES : DR GANESHA PRASAD
EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT PROJECT REFERENCE NO. : 37S0925 COLLEGE : NEW HORIZON COLLEGE OF ENGINEERING, BANGALORE BRANCH : MECHANICAL ENGINEERING GUIDES : DR GANESHA PRASAD
Gait Pattern Generation and Stabilization for Humanoid Robot Based on Coupled Oscillators
 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Gait Pattern Generation and Stabilization for Humanoid Robot Based on Coupled Oscillators
2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Gait Pattern Generation and Stabilization for Humanoid Robot Based on Coupled Oscillators
G-EOL. Discover the simplicity of gait therapy intended for daily use
 G-EOL Discover the simplicity of gait therapy intended for daily use Reha Technology a passion for robotic-assisted gait therapy For over 10 years, Reha Technology has been successfully developing innovative,
G-EOL Discover the simplicity of gait therapy intended for daily use Reha Technology a passion for robotic-assisted gait therapy For over 10 years, Reha Technology has been successfully developing innovative,
Online Learning of Low Dimensional Strategies for High-Level Push Recovery in Bipedal Humanoid Robots
 2013 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-10, 2013 Online Learning of Low Dimensional Strategies for High-Level Push Recovery in Bipedal Humanoid Robots
2013 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-10, 2013 Online Learning of Low Dimensional Strategies for High-Level Push Recovery in Bipedal Humanoid Robots
CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT
 39 CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT 4.1 Modeling in Biomechanics The human body, apart of all its other functions is a mechanical mechanism and a structure,
39 CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT 4.1 Modeling in Biomechanics The human body, apart of all its other functions is a mechanical mechanism and a structure,
Ankle biomechanics demonstrates excessive and prolonged time to peak rearfoot eversion (see Foot Complex graph). We would not necessarily expect
. We would not necessarily expect") Case Study #1 The first case study is a runner presenting with bilateral shin splints with pain and tenderness along the medial aspect of the tibia. The symptoms have increased significantly over the last
Case Study #1 The first case study is a runner presenting with bilateral shin splints with pain and tenderness along the medial aspect of the tibia. The symptoms have increased significantly over the last
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices
 A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
@ Chee-Meng Chew, MM. All rights reserved.
 LIBRARIES Dynamic Bipedal Walking Assisted by Learning by Chee-Meng Chew B.Eng., Mechanical Engineering National University of Singapore, 1991 S.M., Mechanical Engineering Massachusetts Institute of Technology,
LIBRARIES Dynamic Bipedal Walking Assisted by Learning by Chee-Meng Chew B.Eng., Mechanical Engineering National University of Singapore, 1991 S.M., Mechanical Engineering Massachusetts Institute of Technology,
It has been observed that 20-30% of children never form the arches or curves in both the feet or in just one foot.
 Introduction Flat feet, also known as Pes Planus or fallen arches, are a medical condition in which the arch of the foot is prone to suboptimal development. Normally, in this condition, the bottom of the
Introduction Flat feet, also known as Pes Planus or fallen arches, are a medical condition in which the arch of the foot is prone to suboptimal development. Normally, in this condition, the bottom of the
Adaptive Motor Patterns and Reflexes for Bipedal Locomotion on Rough Terrain*
 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 28 - Oct 2, 2015. Hamburg, Germany Adaptive Motor Patterns and Reflexes for Bipedal Locomotion
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 28 - Oct 2, 2015. Hamburg, Germany Adaptive Motor Patterns and Reflexes for Bipedal Locomotion
Gait Instructions. Total Hip Joint Replacement. David F. Scott, MD
 785 E. Holland Spokane, WA 99218 (877) 464-1829 (509) 466-6393 Fax (509) 466-3072 Total Hip Joint Replacement Walking Recommendations Use your walker or cane as needed for assistance during the first 6-weeks
785 E. Holland Spokane, WA 99218 (877) 464-1829 (509) 466-6393 Fax (509) 466-3072 Total Hip Joint Replacement Walking Recommendations Use your walker or cane as needed for assistance during the first 6-weeks
Normal Gait Smooth, rhythmic, efficient Gait cycle consists of one stride by each leg In normal walking, one foot is always on ground
 Normal Gait Smooth, rhythmic, efficient Gait cycle consists of one stride by each leg In normal walking, one foot is always on ground (running both feet leave ground) Gait Cycle Maturation of Gait Small
Normal Gait Smooth, rhythmic, efficient Gait cycle consists of one stride by each leg In normal walking, one foot is always on ground (running both feet leave ground) Gait Cycle Maturation of Gait Small
Improvement of the Cheetah Locomotion Control
 Improvement of the Cheetah Locomotion Control Master Project - Midterm Presentation 3 rd November 2009 Student : Supervisor : Alexander Sproewitz Professor : Auke Jan Ijspeert Presentation of the Cheetah
Improvement of the Cheetah Locomotion Control Master Project - Midterm Presentation 3 rd November 2009 Student : Supervisor : Alexander Sproewitz Professor : Auke Jan Ijspeert Presentation of the Cheetah
The Application of Human Body Models in SIMPACK
 The Application of Human Body Models in SIMPACK Dr. Valentin Keppler, Biomotion Solutions www.biomotion-solutions.com keppler@biomotion-solutions.com 4/15/2011 SIMPACK Usermeeting 2011 1 The Human Factor
The Application of Human Body Models in SIMPACK Dr. Valentin Keppler, Biomotion Solutions www.biomotion-solutions.com keppler@biomotion-solutions.com 4/15/2011 SIMPACK Usermeeting 2011 1 The Human Factor
Programming Self-Recovery in the humanoid Leong Ti Xean 1 Yap Kian Tiong 2
 Programming Self-Recovery in the humanoid Leong Ti Xean 1 Yap Kian Tiong 2 1. INTRODUCTION 1.1 Background In October 2000, Honda announced the ASIMO humanoid robot, capable of interpreting the postures
Programming Self-Recovery in the humanoid Leong Ti Xean 1 Yap Kian Tiong 2 1. INTRODUCTION 1.1 Background In October 2000, Honda announced the ASIMO humanoid robot, capable of interpreting the postures
Dynamic/Static Foot. Tissues. Static Foot. Dynamic Foot
 Dynamic/Static Tissues Static Plantar fascia biomechanical windlass mechanism intrinsic muscles stabilize metatarsophalangeal (MP) toe joints Weight on whole foot - MP toe joints straight Plantar fascia
Dynamic/Static Tissues Static Plantar fascia biomechanical windlass mechanism intrinsic muscles stabilize metatarsophalangeal (MP) toe joints Weight on whole foot - MP toe joints straight Plantar fascia
video Outline Pre-requisites of Typical Gait Case Studies Case 1 L5 Myelomeningocele Case 1 L5 Myelomeningocele
 Outline Evaluation of Orthosis Function in Children with Neuromuscular Disorders Using Motion Analysis Outcomes Terminology Methods Typically developing Case examples variety of pathologies Sylvia Õunpuu,
Outline Evaluation of Orthosis Function in Children with Neuromuscular Disorders Using Motion Analysis Outcomes Terminology Methods Typically developing Case examples variety of pathologies Sylvia Õunpuu,
WALKING AIDS AND GAIT TRAINING
 WALKING AIDS AND GAIT TRAINING By:Dr. Chaman Lal B.S.PT, DPT, Dip. in sports Injuries, MPPS(PAK), PG in Clinical Electroneurophysiology (AKUH), Registered.EEGT (USA), Member of ABRET, AANEM & ASET (USA).
WALKING AIDS AND GAIT TRAINING By:Dr. Chaman Lal B.S.PT, DPT, Dip. in sports Injuries, MPPS(PAK), PG in Clinical Electroneurophysiology (AKUH), Registered.EEGT (USA), Member of ABRET, AANEM & ASET (USA).
A Walking Pattern Generation Method for Humanoid robots using Least square method and Quartic polynomial
 7 A Walking Pattern Generation Method for Humanoid robots using Least square method and Quartic polynomial Seokmin Hong *,,Yonghwan Oh Young-Hwan Chang and Bum-Jae You * University of Science and Technology(UST),
7 A Walking Pattern Generation Method for Humanoid robots using Least square method and Quartic polynomial Seokmin Hong *,,Yonghwan Oh Young-Hwan Chang and Bum-Jae You * University of Science and Technology(UST),
RUNNING ON SOFT GROUND: SIMPLE, ENERGY-OPTIMAL DISTURBANCE REJECTION
 CLAWAR 2012 Proceedings of the Fifteenth International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Baltimore, MD, USA, 23 26 July 2012 543 RUNNING ON SOFT
CLAWAR 2012 Proceedings of the Fifteenth International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Baltimore, MD, USA, 23 26 July 2012 543 RUNNING ON SOFT
1. Hip flexion Muscles: Iliopsoas (psoas major + iliacus)
") Chap. 5 Testing the muscles of the Lower Extremity Part I. Manual Muscle Testing of the hip joint muscles 1. Hip flexion Muscles: Iliopsoas (psoas major + iliacus) Rectus femoris Sartorius Tensor fascia
Chap. 5 Testing the muscles of the Lower Extremity Part I. Manual Muscle Testing of the hip joint muscles 1. Hip flexion Muscles: Iliopsoas (psoas major + iliacus) Rectus femoris Sartorius Tensor fascia
This course will deal with Locomotion and Navigation that includes:
 1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
Trajectory Planning for Smooth Transition of a Biped Robot
 Proceedings of the 003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 003 Trajectory Planning for Smooth Transition of a Biped Robot Zhe Tang 1,, Changjiu Zhou,
Proceedings of the 003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 003 Trajectory Planning for Smooth Transition of a Biped Robot Zhe Tang 1,, Changjiu Zhou,
Push-Recovery Stability of Biped Locomotion
 Push-Recovery Stability of Biped Locomotion Yoonsang Lee1 1 Kyungho Lee2 Samsung Electronics 2 Soon-Sun Kwon3 Seoul National University 3 Jiwon Jeong1 Ajou University 4 Carol O Sullivan4 Disney Research
Push-Recovery Stability of Biped Locomotion Yoonsang Lee1 1 Kyungho Lee2 Samsung Electronics 2 Soon-Sun Kwon3 Seoul National University 3 Jiwon Jeong1 Ajou University 4 Carol O Sullivan4 Disney Research
Injury Mechanism of Bi-articular Muscle Hamstring during Sprint Running. Yu Liu School of Kinesiology, Shanghai University of Sport, China
 Injury Mechanism of Bi-articular Muscle Hamstring during Sprint Running Yu Liu School of Kinesiology, Shanghai University of Sport, China Many mechanisms and risk factors of hamstring injury were implicated.
Injury Mechanism of Bi-articular Muscle Hamstring during Sprint Running Yu Liu School of Kinesiology, Shanghai University of Sport, China Many mechanisms and risk factors of hamstring injury were implicated.
Faster and Smoother Walking of Humanoid HRP-2 with Passive Toe Joints *
 Faster and Smoother Walking of Humanoid HRP-2 with Passive Toe Joints * Ramzi Sellaouti *1, Olivier Stasse *2, Shuuji Kajita *3, Kazuhito Yokoi *1 and Abderrahmane Kheddar *2 *1 JRL, AIST *2 JRL, CNRS
Faster and Smoother Walking of Humanoid HRP-2 with Passive Toe Joints * Ramzi Sellaouti *1, Olivier Stasse *2, Shuuji Kajita *3, Kazuhito Yokoi *1 and Abderrahmane Kheddar *2 *1 JRL, AIST *2 JRL, CNRS
IAV PREPRINTS 5th IFAC/EURON Symposium on Intelligent Autonomous Vehicles Instituto Superior Técnico, Lisboa, Portugal July 5-7, 2004
 IAV24 - PREPRINTS 5th IFAC/EURON Symposium on Intelligent Autonomous Vehicles Instituto Superior Técnico, Lisboa, Portugal July 5-7, 24 MODELLING AND CONTROL OF A BIPED ROBOT N.F. Gonçalves 1 P.M. Silva
IAV24 - PREPRINTS 5th IFAC/EURON Symposium on Intelligent Autonomous Vehicles Instituto Superior Técnico, Lisboa, Portugal July 5-7, 24 MODELLING AND CONTROL OF A BIPED ROBOT N.F. Gonçalves 1 P.M. Silva
Sample Biomechanical Report
 Sample Biomechanical Report To identify the root cause of an injury, and thus determine the optimal treatment for that injury, many pieces of your injury puzzle must be considered. At the Running Injury
Sample Biomechanical Report To identify the root cause of an injury, and thus determine the optimal treatment for that injury, many pieces of your injury puzzle must be considered. At the Running Injury
Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring
 , March 16-18, 2016, Hong Kong Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring Takashige Yano, Jae Hoon Lee, Member, IAENG and Shingo Okamoto 1 Abstract The purpose
, March 16-18, 2016, Hong Kong Walking Experiment of Biped Robot with Antagonistic Actuation Using Non-Linear Spring Takashige Yano, Jae Hoon Lee, Member, IAENG and Shingo Okamoto 1 Abstract The purpose
video Purpose Pathological Gait Objectives: Primary, Secondary and Compensatory Gait Deviations in CP AACPDM IC #3 1
 s in CP Disclosure Information AACPDM 71st Annual Meeting September 13-16, 2017 Speaker Names: Sylvia Ounpuu, MSc and Kristan Pierz, MD Differentiating Between, Secondary and Compensatory Mechanisms in
s in CP Disclosure Information AACPDM 71st Annual Meeting September 13-16, 2017 Speaker Names: Sylvia Ounpuu, MSc and Kristan Pierz, MD Differentiating Between, Secondary and Compensatory Mechanisms in
Truba college of Engineering & Technology, Indore, India. Truba college of Engineering & Technology, Indore, India.
 IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY DESIGN AND DEVELOPMENT OF WALKING BIPEDAL ROBOT WITH THE HELP OF ARDUINO CONTROLLER Deepti Malviya*, Suman Sharma * Truba college
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY DESIGN AND DEVELOPMENT OF WALKING BIPEDAL ROBOT WITH THE HELP OF ARDUINO CONTROLLER Deepti Malviya*, Suman Sharma * Truba college
Walking Control Algorithm of Biped Humanoid Robot on Uneven and Inclined Floor
 J Intell Robot Syst (27) 48:457 484 DOI 1.17/s1846-6-917-8 Walking Control Algorithm of Biped Humanoid Robot on Uneven and Inclined Floor Jung-Yup Kim & Ill-Woo Park & Jun-Ho Oh Received: 31 July 26 /
J Intell Robot Syst (27) 48:457 484 DOI 1.17/s1846-6-917-8 Walking Control Algorithm of Biped Humanoid Robot on Uneven and Inclined Floor Jung-Yup Kim & Ill-Woo Park & Jun-Ho Oh Received: 31 July 26 /
The Starting Point. Prosthetic Alignment in the Transtibial Amputee. Outline. COM Motion in the Coronal Plane
 Prosthetic Alignment in the Transtibial Amputee The Starting Point David C. Morgenroth, MD, Department of Rehabilitation Medicine University of Washington VAPSHCS Outline COM Motion in the Coronal Plane
Prosthetic Alignment in the Transtibial Amputee The Starting Point David C. Morgenroth, MD, Department of Rehabilitation Medicine University of Washington VAPSHCS Outline COM Motion in the Coronal Plane