Comparison of Comfort and Workability on board a Trimaran and a Monohull Yacht
|
|
|
- Della Johns
- 5 years ago
- Views:
Transcription
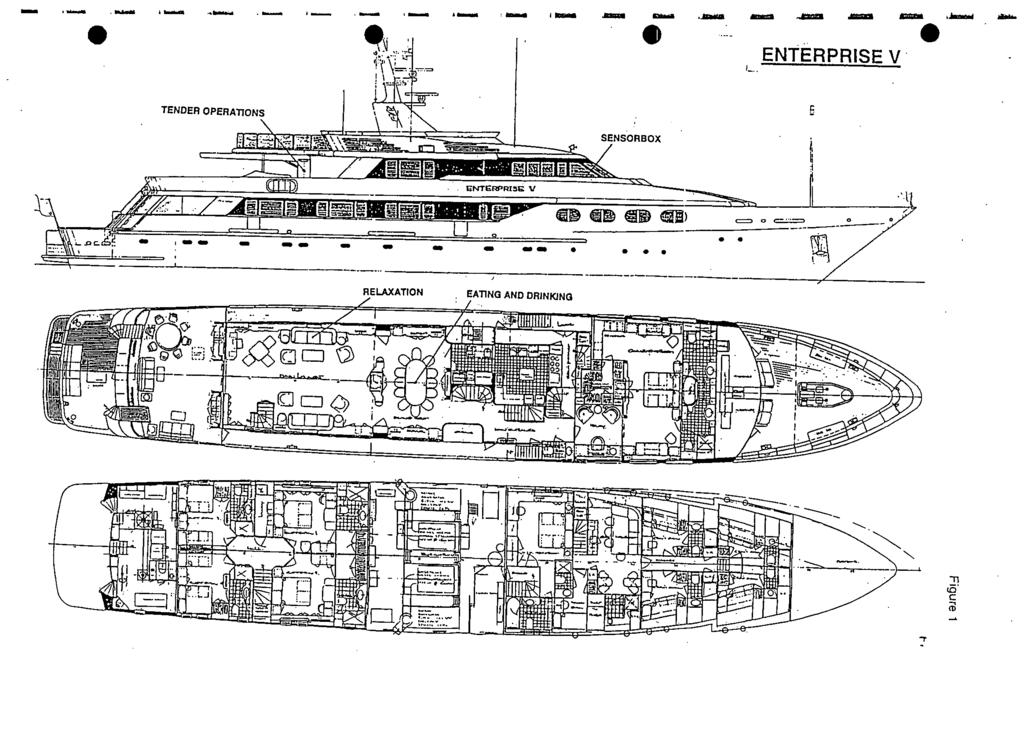
1 Comparison of Comfort and Workability on board a Trimaran and a Monohull Yacht H.R. Luth, Consultant Seakeeping Maritime Research Institute Netherlands (MARIN) Project 2000, November 2000, Amsterdam Abstract This paper discusses the possible merits and disadvantages of a trimaran over a monohull yacht. The powering performance and ship motion behaviour are evaluated for a modern 60 m monohull motor yacht and a trimaran with comparable displacement and installed power. Special emphasis is put on discomfort related to vertical and transverse accelerations. It is concluded that an increase in speed of 2 to 3 knots is possible for the trimaran. Comfort and workability on board a trimaran are superior over a monohull when sailing or at anchor in head seas. In quartering seas, the roll motions and transverse accelerations of this particular trimaran showed to be less tolerable than of the monohull. If these can be solved with special attention to the design of roll stabilising appendages, a trimaran can be a worthwhile option for owners who need a large deck area or who wish to stay onboard a longer than average period of the year. Introduction Over the years, more and more attention is being paid to the possible merits of trimaran huil forms. Up to now the focus has been on warships (for instance the TRITON demonstrator of the UK Navy) and fast transatlantic (container) transport ships (for instance the SeaLance project). The basic idea behind a trimaran is twofold: (1) the resistance of a long and narrow huil is lower than that of a short and beamy huil and (2) the wave induced vertical motions of a long huil are lower than of a short huil. The first will give a higher speed with the same propulsion plant; the latter will result in more comfort on board. Because the transverse stability of a long and narrow huil is significantly lower than of a short wide huil, two side hulls are required to keep the ship upright: the trimaran is born. Because of the large distance bet we en the side hulls and the main hult, the displacement of the side hulls can be relatively small to get the required stability. The side hulls should also be long and narrow to keep the resistance as low as possible. are addressed are the calm water trial and transit speed, workability in transit condition and comfort on board at low speeds and at anchor. Workability and comfort are investigated by evaluating commonly accepted criteria for roll angles, the levels of transverse and vertical accelerations and the effective gravity angles. Description of the monohull The monohull yacht that is used as reference is a modern 60 m de Voogt Ship Design motor yacht. A pair of roll stabilising fins and an anti-rolling tank are installed to reduce the roll motions at high and low speeds. An extensive investigation into the motions and measures to influence the motions and performance of a motor yacht is reported in [1]. Although the length of the present vessel is 20% larger than that used in this reference, the general statements still hold. Figure 1 shows a contour of the vessel. This paper discusses the possible merits of a trimaran huil for yachts from a hydrodynamic point of view by comparing a number of performance indicators of a (nonexisting) trimaran yacht and a typical conventional monohull yacht. Issues that Fig. 1: Contour monohull 1
2 Description of the trimaran To carry the same number of people and the same equipment, the trimaran yacht is designed to have the same displacement as the reference monohutl yacht. The width of the main huil is reduced to roughly 60% of that of the monohull. The total width of the ship (including side hulls) is almost twice that of the monohull. The length is increased by 50% to 90 m. The draft is comparable to that of the monohull. One set of active stabiliser fins is mounted to the inside of the outer hulls to reduce the roll motions of the vessel. Although not exactly the same as the ship used for the calculations, an example of how a trimaran yacht could look like is shown in figure 2, obtained from [2]. cabins and service rooms is also comparable to that of a monohull yacht. As the costs of a yacht depend heavily on the number of rooms and less on the overall length of the vessel alone, the costs for the trimaran are not necessary much higher than for a monohull. Maximum speed and transit speed Figure 3 provides the required and available power of both the monohull and the trimaran huil. These estimates are based on model test results of similar vessels. With the installed engine power the monohull will reach a maximum speed of 16 knots. To save fuel, the long duration transit speed will be somewhat lower. It is assumed that the transit power is in the order of 60% of the maximum power, leading to a transit speed of 14 knots Ship speed (kn) Fig. 3: Powering performance Fig. 2: Contour and front view trimaran Besides the main general improvements of a trimaran over a monohull described in the introduction, the differences for yacht applications are: larger decks accommodating more cabins with balconies, a larger open deck area aft that can be used for dining, recreational purposes or for a well accessible heli-deck and finally more space around the ship to launch and store small boats and accommodate diving facilities. Because the trimaran is designed to have the same number of people on board as the monohull, the number and size of As the resistance of the trimaran huil is lower, the maximum speed for the same installed power is 19 knots and the transit speed at reduced power is 16 knots. This shows one of the great advantages of the trimaran concept: the lower resistance leads to higher speeds at equal power levels; an increase of 2 to 3 knots is possible. This can also be inverted: smaller engines are possible to obtain the same speed as for a monohull; a reduction of 40% in power is possible. Smaller engines will lead to lower operational costs, a reduction in the weight of the ship and less environmental contamination.

3 The ship motion calculations were carried out for two speeds: at anchor (0 knots) and at cruise speed (16 knots for the trimaran and 14 knots for the monohull. Criteria, waves and operability To judge the performance of a vessel it is common practice to adopt criteria for certain motions and to determine up to what wave height these criteria are not exceeded. The total percentage of time of occurrence of waves that lead to motions below the criteria is called the operability, the percentage of time that the criteria is exceeded is called the downtime. Figure 4 (from [1]) shows this in a simplified way. The downtime is often expressed in 1/1000,h and sometimes in percentages. GHT=^> r WAVE HE SIGNIFICAN 1 MEAN PERIOD = > Fig. 4: Performance analysis NON-OPERATIONAL --- WAVE CONDITIONS CRITERION 1 CRITERION 2 OPERATIONAL WAVE CONDITIONS The location on the worid where the ships sails will have an influence on the operability of the ship. The North Sea is known to have a high percentage of occurrence of high waves, in the Caribbean the percentage of occurrence of high wave is lower. Consequently, the operability in the Caribbean will be higher than on the North Sea. For the present work it is assumed that the vessels sail in the Caribbean. A scatter diagram of the Caribbean as found in Global Wave Statistics [3] is given in figure 5. Vertical accelerations (originattng mainly from the heave and pitch motion) are the leading factor in degradation of workability and comfort on board. In other words, if the vertical accelerations are too high, people will not be able to perform their assigned tasks or they wül get seasick. Two criteria are adopted: one higher level for the crew (as they are used to ship motions) and one lower level for the owner and his guests. According to [4] a vertical acceleration Root Mean Square (RMS) level of 1 m/s z (or 0.1 g) is the long-term tolerable limit for crews. A RMS level of 0.2 m/s 2 (or 0.02 g) is adopted for the owner and his guests, as this is close to the lower threshold below which vomiting is unlikely to take place. f» 2 ^iy 3N. JS y Oecutmne» ot n n conhafl ricaribtaanint'ioooth ^ < ; 14 t / 35 <ï -^^r 10 SB 1» z 37 1Z *s 23 e Zaro-upacrotatno; partod T3 ( ) Fig. 5: Wave scatter diagram Transverse accelerations (originating from the combined roll, sway and yaw motion) lead to reduced mobility on board. In other words, if the transverse accelerations are too high, people will not be able to stand upright or walk around the ship without support. Again, different maximum tolerable levels are adopted for the crew and the owner: 0.5 m/s 2 (or 0.05 g) RMS for the crew who is used to walk around on a rolling ship and 0.3 m/s 2 (or 0.03 g) for the owner who is less accustomed to the ship motions. Finally, a criterion is adopted to describe the limit of the vessel itself: for shipping water over the bow a limit of 5% is adopted. This means that when more than one out of 20 waves result in shipping of green water over the bow the captain will decide to reduce the speed of the vessel or change its course. As this interferes with the schedule, it can be regarded as a reduction of workability. Assessment of ship motions The motions of the monohull and the trimaran were calculated using MARIN's linear strip-theory program SHIPMO (monohull) and TRIMO (trimaran). Linear strip-theory calculates the wave induced force and the reaction forces of the vessel separately. This separate calculation provides good insight in the nature of the motion characteristics. As the method only uses the underwater part of the ship up to
4 the calm water level, the effect of bow flare and shallow aftship sections that might emerge in a wave are not accounted for. Still, experience has shown that the calculations give reasonable answers in moderate wave conditions. The results are certainly reliable enough to compare the motion behaviour of two different concepts, as in this paper. Heave, pitch and vertical accelerations Vertical accelerations are a result of the combined heave and pitch motion of a ship. In head and quartering seas, the pitch motion dominates the vertical accelerations near the ends of the ship. In the midship area and in beam seas, vertical accelerations are dominated by heave. The length of a ship determines the pitch motions to a great extent: the longer the ship is, the sooner it can not follow the wave slope anymore. This can be seen in Figure 6 when the lines for the pitch motion are foliowed from left to right. First both ships follow the wave slope. The longer trimaran drops down first, the shorter monohull later. The heave motion shows the same trend: the trimaran starts to drop below a value of one earlier than the monohull. In beam waves it is just the opposite: as the monohull is wider than the main huil of the trimaran, the monohull heave motions in beam seas are the lowest. Bow and stern quartering seas show similar behaviour as head seas. As a consequence of the lower heave and pitch motions, the vertical acceleration level of the trimaran is lower that that of the monohull for all headings except pure beam seas. Figure 7 compares the vertical motions at zero speed at the forward part of the deckhouse of the vessels. This figure shows the amount of acceleration per meter wave height as a function of wave frequency and heading. Especially in head and following seas the vertical accelerations are significantly lower. Only very short beam waves (to the right hand side of the middle of the figure, the vertical accelerations of the trimaran are higher than of the monohull. Trimaran Ship motions at 0 knots in head seas 1 E heave pitch Wave frequency (rad/s) Trimaran Monohull wave slope Fig. 6: Heave and pitch motions Wave frequency (rad/s) Fig. 7: Transfer functions of vertical accelerations
5 Table 1 shows the downtime figures associated with the vertical motions on a number of locations on the ship. A downtime of 0% indicates that the adopted criterion is never exceeded. This table provides a quantitative comparison between the trimaran and the monohull. It confirms that the downtime of the trimaran is lower for all headings except pure beam seas. Where the owner can be in the lounge in the aft part of the superstructure up to Beaufort 4 on the monohull without getting seasick, he can withstand up to Beaufort 7 on the trimaran. The crew can work at this location up to Beaufort 6 on the monohull, the trimaran allows working even beyond Beaufort 9. Table 1: Downtime (trimaran/monohull) in % due to exceeedance of vertical acceleration criteria Headinq (deg) at anchor deckhouse fore deckhouse aft wheelhouse 78/88 52/73 0/0 96/93 94/90 17/5 69/88 26/67 0/0 43/86 7/43 0/0 at cruise speed deckhouse fore deckhouse aft wheelhouse 7/27 2/8 0/0 95/90 94/90 15/2 96/97 85/92 22/32 93/96 76/89 15/38 Figure 8 compares the vertical acceleration for the aft part of the superstructure in another way. It shows the acceleration level as a function of Beaufort number. Fig. 8: Vertical acceleration as a function of Beaufort number Figure 9 shows the distribution of the vertical acceleration over the length of the ships. SlripLrajÜj Fig. 9: Distribution of vertical accelerations over length in Beaufort 5 head seas 5
6 When applying the criteria mentioned in the precious section, a usable length can be defined. The usable length is defined as the length of the ship where the vertical accelerations are lower than the criterion. At zero speed, the monohull shows a usable length of only 10 m while the trimaran shows a usable length equat to the whole length of the superstructure. This means that while at anchor in Beaufort 5 the owner feels comfortable around the midship on his monohull only (he may get seasick when he walks toward the forward or aft end of the deckhouse), he can freely use the whole deckhouse length on the trimaran. At forward speed the difference is smaller. In this case it is still very welcome for the crew. Trimaran Because the main huil is narrower than that of the monohull, the crew space is distributed over a longer length and thus closer to the more uncomfortable ends of the ship. With the better motion characteristics this has no negative effect on the ability of the crew to work on board. From Figure 8 can be seen that the advantage of the trimaran for the crew is found above mainly Beaufort 5 Roll motion and trans verse accelerations Transfer functions of the roll motions at zero speed and at cruise speed are given in Figure 10. At zero speed, the monohull shows the classic doublé peaked shape over the frequency that is due to the presence of the anti-rolling tank. Monohull W*Vt 1-WOJtNCY natt WAVI HttQUENCÏ Fig. 10: Transfer functions of roll

7 The trimaran shows a single peak over the frequency, with a higher maximum value than for the monohull, and, more parttcular, a doublé peak over the heading. This means that at zero speed the trimaran will roll more in quartering seas than in beam seas. Obviously, this is caused by the side hulls of the trimaran. At cruise speed both ships show only one peak in stern quartering seas; the trimaran having a peak value twice that of the monohull. The reason for the higher roll angles of the trimaran was implicitly mentioned before: due to the large distance from the centre line, the side hulls provide a high restoring roll moment at low roll angles. This leads to an excellent increase of stability in calm water, but at the same time to a high roll excitation moment when a wave passes the ship. Figure 11 shows that the trimaran wave excitation moment around the natural roll frequency in beam seas is roughly twice that of the monohull. Combined with a similar level of damping this leads to roughly twice the roll angles of a monohull when the wave encounter frequency matches the natural frequency of roll. The very high peak value found for _the trimaran is confirmed by seakeeping model tests carried out for another trimaran project at MARIN. Without stabiliser fins even higher roll angles we re found: at the worst heading a 20 degree roll amplitude was measured in a 1 m wave. Roll excitation in beam seas at zero speed Range of natural rolt frequencies of yachts accelerations in the order of twice that of the monohull. At forward speed, the sway and yaw motion have a larger influence. The highest peak value for the monohull is even found in bow quartering seas. The trimaran shows comparable acceleration levels in bow quartering seas, but significantly higher levels in stern quartering seas. Figure 12 compares the transverse accelerations in the aft part of the superstructure for the worst heading: stern quartering waves S Transverse accelerations In aft part of superstructure in stem quartering seas zero speed Trimaran Beaufort nr. Monohull Fig. 12: Transverse acceleration function of Beaufort number While the acceleration levels on monohull are acceptable for the owner up to Beaufort 7, the trimaran is not acceptable even in Beaufort 3. The presented stern quartering sea case is the worst case that can be found. However, as can be seen in Table 2, other headings show similar trends. as Wave frequency (rad/s) -Trimaran Fig. 11: Wave excitation forces Ktonohul At zero speed, the transverse acceleration is entirely dominated by the roll motion. Consequently, the trimaran shows the highest values in bow and stern quartering seas, with maximum 1.2 Table 2: Downtime (trimaran/monohull) in % due to exceedance of roll and transverse acceleration criteria Heading (deg) at anchor Roll Deckhouse fore Deckhouse aft Wheelhouse 79/49 90/79 92/88 87/61 51/41 93/91 92/90 88/81 74/41 88/81 90/86 83/63 at cruise speed Roll Deckhouse fore Deckhouse aft Wheelhouse 51/6 79/9 75/7 49/0 0/0 86/75 82/69 62/38 0/0 40/57 63/48 18/17 7

8 The presented trimaran is certainly not designed to show minimum roll motions. By changing the longitudinal location and, possibly more important, reducing the volume and waterplane area of the side hulls the excitation can be reduced. Increasing the activity of the roll stabilising fins, installing larger fins, or even two pairs of fins at each side will reduce the roll motion at forward speed even more. A suitable solution for the zero speed case stil has to be developed. The results indicate clearly that sufficiënt measures should be taken to reduce roll motions when designing a trimaran. Shipping of water Figure 13 shows that the percentage of time that green water is shipped over the bow when the monohull sails a whole year at cruise speed in head seas in the Caribbean is 4.2%. downtime asfunction of bow height (all year, single heading, cruise speed ) \ Head seas Bow quartering seas % \ \ \ ^_ Msnohuü f leve) -** trimaran bow height /monohull bow height Fig. 13: Downtime as a function of bow height The all year value for bow quartering seas is 0.7%. These numbers are lower in reality because waves come from other directions also, the ship is not always sailing at cruise speed and most important, it is not sailing 365 days per year. However, it is a good measure to compare the performance of the trimaran to that of the monohull. The figure shows that the bow height of the trimaran has to be in the order of 15% to 30% higher than that of a monohull to have the same probability of shipping water over the bow. Obviously, the combined vertical water and ship motions are higher near the bow of the trimaran than they are for the monohull. A consequence of the last conclusion is that the relative vertical water velocity at the bow of the trimaran is higher also. As this vertical water velocity is considered to be the driving force behind bow flare slamming, bow flare angles (the angle between the horizontal and the bow) of the trimaran should be higher than is common practise for existing monohulls. Conclusions A trimaran yacht with the same displacement as a monohull yacht offers larger decks accommodating more cabins with balconies, a larger open deck area aft to be used for dintng, recreational purposes or for a wel) accessible heli-deck and finally more space around the ship to launch and store small boats and accommodate diving facilities. The calm water speed of a trimaran will be in the order of 2 to 3 knots higher than a monohull with the same displacement. When the same speed is required, the in stal led propulsion power can be reduced by some 40%, leading to lower operational costs, a reduction in weight and less environmental contamination. If the heading of the ship can be adjusted such that the bow of the ship points towards the waves, comfort at anchor and workability at cruise speed onboard a trimaran, expressed in the vertical accelerations and transverse accelerations, is significantly higher than onboard a monohull. However, when the waves arrive at the ship under an angle with the bow, and especially in stern quartering seas, rolling and transverse accelerations will be higher onboard a trimaran. Therefore special attention should be paid to the design of the side hulls and the roll stabilising appendages of a trimaran. More than the conventional pair of stabiliser fins is required to match the performance of the trimaran in stern quartering seas with that of the monohull. Zero speed solutions still need to be developed The design of the bow of a trimaran, both in terms of bow height and flare angle,
9 should be different from that of a conventional monohull. Larger freeboard and higher flare angles are required to obtain the same comfort and workability reduction due to slamming and shipping of green water. The combined features of a trimaran yacht offer excellent possibilities for two specific groups of yacht owners: (1) those who require a wide range of activities and related equipment onboard will profit from the larger deck area and (2) those who want to stay onboard more time and sail longer distances will profit from the higher speed or lower fuel consumption and of the large deck area providing a well accessible helicopter landing platform. Ref eren ces [1] "Passenger Comfort on Board Motor Yachts". Dallinga, R.P. and van Wieringen, H.M..HISWA1997 [2] The Feadship Story", TRP Magazines Ltd, London, ISBN [3] PC Global Wave Statistics, BMT, London, 1987 [4] NORDFORSK, Assessment of ship performance in a seaway ISBN ,1987 9
10 RESULTS OF THE ON-BOARD MEASUREMENTS Data The records cover in total two three-month periods on board the two yachts. Figure 3 shows a sample time history of the data statistics. From each "reported" comfort rating (Figure 4) statistics are available of the roll response and the vertical and transverse accelerations at key locations. The volume of the data in the various categories is indicated in Figure 5. Figure 6 indicates the correlation between the recorded roll motion and the recorded transverse acceleration. A very good coherence is obtained; indicating that roll is a prime factor in the transverse accelerations. The lower values in the cloud correspond closely with the inevitable gravity component along the deck. The dominance of the roll suggests that sway and yaw contributions are relatively small; this implies that by reducing the roll response the acceleration levels can be reduced as well. Figures 7 and 8 indicate the trend of the vertical and transverse accelerations with the comfort ratings. It shows that in the case of the vertical accelerations there is no clear relation between the comfort rating and the mean or median acceleration level. In the case of the transverse acceleration and the roll motion a very clear and similar trend is obtained. These values are summarised in the following table. Failed Very bad Bad Good Very good Rms Tr.Acc. m/s" 1 Mean Median Rins Roll deg Mean Median Taking the median value as the most robust estimate the transition between bad and good is around 0.08 m/s 2. A value, which is quite close to the 0.1 m/s 2 suggested by the motion simulator trials. The value for very bad (0.19 m/s 2 rms) is close to the 0.14 nyvsuggested by the coffee-break and lunch trials on board the motion simulator. One obvious characteristic of the present data is that the rms values can not take negative values. The fact that the Rayleigh distibution reflects this characteristic and the reasonable fit with the measured data motivated its use to predict 10% and 90% exceedance values. Rating level Very Bad & Failed Bad Good Very Good Rms Tr. Ace. m/s' i 10% % % Rms Roll deg 10% % % Comparing the median values from the fitted Rayleigh distribution with the median valuefromthe data a reasonable agreement is obtained. DISCOMFORT CRTTER1A AND DESIGN 1MPL1CAT10NS Discomfort criteria The reported comfort ratings correspond with a volume of accelerations statistics. These statistics show a considerable scatter, which indicates that the issue of discomfort is only partly understood. Despite the scatter, the correlation between the median values and the comfort ratings suggest strongly that the transverse accelerations are a prime indicator for passenger discomfort. These median values, which correspond with a 50% score, suggest that an rms transverse acceleration around 0.1 m/s 2 is the level in which in 50% of the reported cases the motions are characterised as "bad". It is encouraging to note that the on board measurements and the Motion Simulator Trials in schematised conditions yield very similar levels.
11 The results of the on-board measurements as well as the Motion Simulator Trials agree also on the result that the vertical accelerations are only of minor influence (within the range of the present data set). Design implications From literature the following five 'human factors engineering principles' to optimise human performance in ship operations and design are suggested: locate critica! stations near the ship's effective centre of rotation minimize head movements align an operator with the principal axis of the ship's huil avoid combining provocative sources provide an external frame of reference In the light of the present results the remark on combined sources in terms of combined motions bay be less relevant. The same is true for the longitudinal location on board the ship; since vertical accelerations are less important the locations w.r.t. to the pitch centre is also less important. The present results do suggest that the emphasis on reducing roll is important to improve yacht design. As outlined in earlier work on behalf of Feadship measures to increase the roll damping are quite effective. On-board recognition of the actual wave conditon (wind sea, swell) and direction by means of ship radar and subsequent evaluation of the optimum heading on basis of the known motion characteristics seem feasible with contemporary radar and computer technology. By means of a stem thruster or increasing the wind-vaning tendency of the vessel it might be easier to maintain the optimum heading. CONCLUSIONS In the course of 1997 and 1998 the motions of two motor yachts were continuously recorded. The results of measurements were related to questionaire based comfort ratings. The results were given an interpretation in the light of dedicated Motion Simulator Trials by TNO and existing literature on human factors. Based on the results it seems justified to conclude that: 1. The retumed comfort rating shows considerable scatter which suggests that the rating is both rather subjective and situational. 2. Both the on-board measurements as well as the simulator trials suggest that the transverse accelerations are a relevant measure for discomfort 3. Both data sets also suggest that within the present data sets the vertical accelerations are less important than the transverse accelerations. 4. The data suggest that an rmstransverse acceleration of 0.1 m/s 2 will be rated as 'bad' by 50% of the passengere. This value is considerable lower than suggested by the existing literature. Based on these findings it seems right to conclude that the ongoing efforts to reduce the roll motions Of the present class of ships is very relevant to design more comfortable motor yachts. Suggestions for improvements in yacht operations were made.
12 izzz^ifisiê

13 TENDER OPERATIONS CARMACVII I f Cfr- SZX+^Z Hl 'i Eigei-;^ i Pi; se B?3S^ Tl to' c (B ro
14 Carmac VII: July 1997 Day Accy Std Accy Min Accy Max X Accy Marker
15 Figure 4 M.Y. Respondent Date Posiüon or location Number of guests ^ADSHIP Captain's Questionnaire 'Comfort at Anchof i^; Local time: \2ca Greenwich Mean Time: 2S0O Number of sick guests: NIU. The relevant event was: El Q Q Q tender operations & water sports, eating & drinking; galley, sleeping & relaxation, other, namely: My judgement on that. event is: ^ Q fafled Q n verybad O bad Q good Q verygood Comments ^w/s.m-.htt.<&irjc* TTw&tf f%ss Local time: / 3 3 ö. Greenwich Mean Time: The relevant event was: Q Q Q tender operations & water sports, eating & drinking; galley, sleeping & relaxation, other, namely: My judgement on that event is: Q failed Q verybad Comments 232C. Number of sick guests: J 0 bad Q good Q verygood Local time: /*/ oo Greenwich Mean Time: ac? o<r> The relevant event was: U Q Q tender operations & water sports, eating & drinking; gajiey, sleeping & relaxation, other, namely: Number of sick guests: f My judgement on that event is: El failed Q ven verybad Q bad Q good Q verygood Comments 'T. A> t I r-. LJH* t- f <j My overall judgement of the day Q very bad Comments / bad Q good Q very good

16 No Data Entries II Enterprise BCarmac D Total failed very bad bad good yery good Comfort Rating

17 jjjiaa JMSfl jtua rfoaa tst^ia rtijé*üi CEUfiOI Relation between Roll and Transverse Acceleratlons E o < ^ u rms Roll [deg]

18 O ^MfiA ogtttb tmsba f Comfort Rating & Vertical Accelerations av mean av mëdian failed very bad good very bad good Comfort Rating co' c -*j

19 Figure 8 c c.2 03 "O CD CD e E co co w c o co jy ü < CD W CD > CO c oö c w t: o E o o LO O LO O LD O co CM CM v- O O o O O O o O O ms Tr. Accel. i_ FT W >* 'S i- O 0) o > CD "O o O) ö) c -*-J co "O Q co XI t o <+- E "O o co ^ <D > "O CD CO o
Roll Stabilisation at Anchor: Hydrodynamic Aspects of the Comparison of Anti-Roll Tanks and Fins
 Roll Stabilisation at Anchor: Hydrodynamic Aspects of the Comparison of Anti-Roll Tanks and Fins R.P. Dallinga, Manager Seakeeping Department Maritime Research Institute Netherlands (MARIN) Project 2002,
Roll Stabilisation at Anchor: Hydrodynamic Aspects of the Comparison of Anti-Roll Tanks and Fins R.P. Dallinga, Manager Seakeeping Department Maritime Research Institute Netherlands (MARIN) Project 2002,
Comparison of Motion Sickness Incidence (MSI) of three Crew Transfer Vessels with different hull forms. Héloïse Vignal
 of three Crew Transfer Vessels with different hull forms. Héloïse Vignal") Comparison of Motion Sickness Incidence (MSI) of three Crew Transfer Vessels with different hull forms Héloïse Vignal University Supervisors : Prof. Zbigniew Sekulski, ZUT Prof. Florin Pacuraru, UGAL Industrial
Comparison of Motion Sickness Incidence (MSI) of three Crew Transfer Vessels with different hull forms Héloïse Vignal University Supervisors : Prof. Zbigniew Sekulski, ZUT Prof. Florin Pacuraru, UGAL Industrial
Comfort onboard yachts in anchored conditions
 Comfort onboard yachts in anchored conditions G. Gaillarde, R.P. Dallinga, G. Loeff, H. Luisman, MARIN 1 1. Introduction By limiting comfort and on-board activities poor seakeeping affects the sheer enjoyment
Comfort onboard yachts in anchored conditions G. Gaillarde, R.P. Dallinga, G. Loeff, H. Luisman, MARIN 1 1. Introduction By limiting comfort and on-board activities poor seakeeping affects the sheer enjoyment
CRITERIA OF BOW-DIVING PHENOMENA FOR PLANING CRAFT
 531 CRITERIA OF BOW-DIVING PHENOMENA FOR PLANING CRAFT Toru KATAYAMA, Graduate School of Engineering, Osaka Prefecture University (Japan) Kentarou TAMURA, Universal Shipbuilding Corporation (Japan) Yoshiho
531 CRITERIA OF BOW-DIVING PHENOMENA FOR PLANING CRAFT Toru KATAYAMA, Graduate School of Engineering, Osaka Prefecture University (Japan) Kentarou TAMURA, Universal Shipbuilding Corporation (Japan) Yoshiho
An Investigation into the Capsizing Accident of a Pusher Tug Boat
 An Investigation into the Capsizing Accident of a Pusher Tug Boat Harukuni Taguchi, National Maritime Research Institute (NMRI) taguchi@nmri.go.jp Tomihiro Haraguchi, National Maritime Research Institute
An Investigation into the Capsizing Accident of a Pusher Tug Boat Harukuni Taguchi, National Maritime Research Institute (NMRI) taguchi@nmri.go.jp Tomihiro Haraguchi, National Maritime Research Institute
for Naval Aircraft Operations
 Seakeeping Assessment of Large Seakeeping Assessment of Large Trimaran Trimaran for Naval Aircraft Operations for Naval Aircraft Operations Presented by Mr. Boyden Williams, Mr. Lars Henriksen (Viking
Seakeeping Assessment of Large Seakeeping Assessment of Large Trimaran Trimaran for Naval Aircraft Operations for Naval Aircraft Operations Presented by Mr. Boyden Williams, Mr. Lars Henriksen (Viking
STABILITY OF MULTIHULLS Author: Jean Sans
 STABILITY OF MULTIHULLS Author: Jean Sans (Translation of a paper dated 10/05/2006 by Simon Forbes) Introduction: The capsize of Multihulls requires a more exhaustive analysis than monohulls, even those
STABILITY OF MULTIHULLS Author: Jean Sans (Translation of a paper dated 10/05/2006 by Simon Forbes) Introduction: The capsize of Multihulls requires a more exhaustive analysis than monohulls, even those
THE EFFECTS OF THE HULL VANE ON SHIP MOTIONS OF FERRIES AND ROPAX VESSELS
 THE EFFECTS OF THE HULL VANE ON SHIP MOTIONS OF FERRIES AND ROPAX VESSELS K Uithof, B Bouckaert, P G van Oossanen, and N Moerke, Hull Vane B.V., van Oossanen Naval Architecture, and van Oossanen Fluid
THE EFFECTS OF THE HULL VANE ON SHIP MOTIONS OF FERRIES AND ROPAX VESSELS K Uithof, B Bouckaert, P G van Oossanen, and N Moerke, Hull Vane B.V., van Oossanen Naval Architecture, and van Oossanen Fluid
IMO REVISION OF THE INTACT STABILITY CODE. Proposal of methodology of direct assessment for stability under dead ship condition. Submitted by Japan
 INTERNATIONAL MARITIME ORGANIZATION E IMO SUB-COMMITTEE ON STABILITY AND LOAD LINES AND ON FISHING VESSELS SAFETY 49th session Agenda item 5 SLF 49/5/5 19 May 2006 Original: ENGLISH REVISION OF THE INTACT
INTERNATIONAL MARITIME ORGANIZATION E IMO SUB-COMMITTEE ON STABILITY AND LOAD LINES AND ON FISHING VESSELS SAFETY 49th session Agenda item 5 SLF 49/5/5 19 May 2006 Original: ENGLISH REVISION OF THE INTACT
ITTC Recommended Procedures and Guidelines
 Page 1 of 6 Table of Contents 1. PURPOSE...2 2. PARAMETERS...2 2.1 General Considerations...2 3 DESCRIPTION OF PROCEDURE...2 3.1 Model Design and Construction...2 3.2 Measurements...3 3.5 Execution of
Page 1 of 6 Table of Contents 1. PURPOSE...2 2. PARAMETERS...2 2.1 General Considerations...2 3 DESCRIPTION OF PROCEDURE...2 3.1 Model Design and Construction...2 3.2 Measurements...3 3.5 Execution of
AUSTAL WIND EXPRESS SERIES
 WIND EXPRESS SERIES ABOUT AUSTAL AUSTAL WIND EXPRESS SERIES Austal is the world s leading designer and builder of customised, high performance aluminium vessels for both commercial and defence applications
WIND EXPRESS SERIES ABOUT AUSTAL AUSTAL WIND EXPRESS SERIES Austal is the world s leading designer and builder of customised, high performance aluminium vessels for both commercial and defence applications
FAST SUPPLY INTERVENTION and CREW TRANSFER VESSEL M P 6 2 5
 FAST SUPPLY INTERVENTION and CREW TRANSFER VESSEL M P 6 2 5 MAIN PARTICULARS LENGTH OVER ALL 60.68 m LENGTH WATER LINE 59.35 m BREADTH MAX 20.80 m DRAUGHT MAX 3.10 m DEPTH 6.70 m MAX SPEED 37.0 knots @
FAST SUPPLY INTERVENTION and CREW TRANSFER VESSEL M P 6 2 5 MAIN PARTICULARS LENGTH OVER ALL 60.68 m LENGTH WATER LINE 59.35 m BREADTH MAX 20.80 m DRAUGHT MAX 3.10 m DEPTH 6.70 m MAX SPEED 37.0 knots @
THE USE OF A VERTICAL BOW FIN FOR THE COMBINED ROLL AND YAW STABILIZATION OF A FAST PATROL BOAT
 THE USE OF A VERTICAL BOW FIN FOR THE COMBINED ROLL AND YAW STABILIZATION OF A FAST PATROL BOAT J Alexander Keuning, Shiphydromechanics Department, Delft University of Technology, Netherlands Guido L Visch,
THE USE OF A VERTICAL BOW FIN FOR THE COMBINED ROLL AND YAW STABILIZATION OF A FAST PATROL BOAT J Alexander Keuning, Shiphydromechanics Department, Delft University of Technology, Netherlands Guido L Visch,
Development of TEU Type Mega Container Carrier
 Development of 8 700 TEU Type Mega Container Carrier SAKAGUCHI Katsunori : P. E. Jp, Manager, Ship & Offshore Basic Design Department, IHI Marine United Inc. TOYODA Masanobu : P. E, Jp, Ship & Offshore
Development of 8 700 TEU Type Mega Container Carrier SAKAGUCHI Katsunori : P. E. Jp, Manager, Ship & Offshore Basic Design Department, IHI Marine United Inc. TOYODA Masanobu : P. E, Jp, Ship & Offshore
A Study on Roll Damping of Bilge Keels for New Non-Ballast Ship with Rounder Cross Section
 International Ship Stability Workshop 2013 1 A Study on Roll Damping of Bilge Keels for New Non-Ballast Ship with Rounder Cross Section Tatsuya Miyake and Yoshiho Ikeda Department of Marine System Engineering,
International Ship Stability Workshop 2013 1 A Study on Roll Damping of Bilge Keels for New Non-Ballast Ship with Rounder Cross Section Tatsuya Miyake and Yoshiho Ikeda Department of Marine System Engineering,
ITTC - Recommended Procedures and Guidelines
 7.5 Page 1 of 5 Table of Contents 1. PURPOSE OF PROCEDURE... 2 2. DESCRIPTION OF PROCEDURE... 2 4. DOCUMENTATION... 4 5. REFERENCES... 4 3. PARAMETERS... 4 Updated by Approved Manoeuvring Committee of
7.5 Page 1 of 5 Table of Contents 1. PURPOSE OF PROCEDURE... 2 2. DESCRIPTION OF PROCEDURE... 2 4. DOCUMENTATION... 4 5. REFERENCES... 4 3. PARAMETERS... 4 Updated by Approved Manoeuvring Committee of
Wind Turbine Shuttle. Ferdinand van Heerd
 Wind Turbine Shuttle Ferdinand van Heerd Contents Introduction Concept Resistance Seakeeping Vessel motion compensation system Hoisting motion compensation system Landing the wind turbine Workability Efficiency
Wind Turbine Shuttle Ferdinand van Heerd Contents Introduction Concept Resistance Seakeeping Vessel motion compensation system Hoisting motion compensation system Landing the wind turbine Workability Efficiency
RESOLUTION MSC.141(76) (adopted on 5 December 2002) REVISED MODEL TEST METHOD UNDER RESOLUTION 14 OF THE 1995 SOLAS CONFERENCE
 (adopted on 5 December 2002) REVISED MODEL TEST METHOD UNDER RESOLUTION 14 OF THE 1995 SOLAS CONFERENCE") MSC 76/23/Add.1 RESOLUTION MSC.141(76) THE MARITIME SAFETY COMMITTEE, RECALLING Article 38(c) of the Convention on the International Maritime Organization concerning the functions of the Committee, RECALLING
MSC 76/23/Add.1 RESOLUTION MSC.141(76) THE MARITIME SAFETY COMMITTEE, RECALLING Article 38(c) of the Convention on the International Maritime Organization concerning the functions of the Committee, RECALLING
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES
 ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
Interceptors in theory and practice
 Interceptors in theory and practice An interceptor is a small vertical plate, usually located at the trailing edge on the pressure side of a foil. The effect is a completely different pressure distribution
Interceptors in theory and practice An interceptor is a small vertical plate, usually located at the trailing edge on the pressure side of a foil. The effect is a completely different pressure distribution
Marine Kit 4 Marine Kit 4 Sail Smooth, Sail Safe
 Marine Kit 4 Marine Kit 4 Sail Smooth, Sail Safe Includes Basic ship Terminologies and Investigation Check list Index 1. Ship Terminology 03 2. Motions of a Floating Body...09 3. Ship Stability.10 4. Free
Marine Kit 4 Marine Kit 4 Sail Smooth, Sail Safe Includes Basic ship Terminologies and Investigation Check list Index 1. Ship Terminology 03 2. Motions of a Floating Body...09 3. Ship Stability.10 4. Free
ITTC Recommended Procedures Testing and Extrapolation Methods Loads and Responses, Seakeeping Experiments on Rarely Occurring Events
 Loads and Responses, Seakeeping Page 1 of 5 CONTENTS 1. PURPOSE OF PROCEDURE 2. STANDARDS FOR EXPERIMENTS ON RARELY OCCURRING EVENTS 2.1 Previous Recommendations of ITTC 2.2 Model Design and Construction
Loads and Responses, Seakeeping Page 1 of 5 CONTENTS 1. PURPOSE OF PROCEDURE 2. STANDARDS FOR EXPERIMENTS ON RARELY OCCURRING EVENTS 2.1 Previous Recommendations of ITTC 2.2 Model Design and Construction
MASTER THESIS PRESENTATION. Comparison Of Seakeeping Performance Of The Two Super Yachts Of 53 And 46 m In Length
 MASTER THESIS PRESENTATION Comparison Of Seakeeping Performance Of The Two Super Yachts Of 53 And 46 m In Length Muhammad Asim Saleem Supervisor : Prof. Dario Boote, Universita degli studi di Genova, Italy
MASTER THESIS PRESENTATION Comparison Of Seakeeping Performance Of The Two Super Yachts Of 53 And 46 m In Length Muhammad Asim Saleem Supervisor : Prof. Dario Boote, Universita degli studi di Genova, Italy
Stan Patrol Executive Summary. The Development of the Damen Interceptor 1102
 Executive Summary The Development of the Damen Interceptor 1102 Contents Contents Introduction Typical patrol boat requirements Proven design Hull form Sea Axe Crew ergonomics Navigation & communication
Executive Summary The Development of the Damen Interceptor 1102 Contents Contents Introduction Typical patrol boat requirements Proven design Hull form Sea Axe Crew ergonomics Navigation & communication
Ocean Transits in a 50m, 45 knot Catamaran The Minimisation of Motions and Speed Loss
 Ocean Transits in a 50m, 45 knot Catamaran The Minimisation of Motions and Speed Loss Edward Dudson, Ship Design Director, Nigel Gee and Associates Ltd, UK James Roy, Senior Naval Architect, Nigel Gee
Ocean Transits in a 50m, 45 knot Catamaran The Minimisation of Motions and Speed Loss Edward Dudson, Ship Design Director, Nigel Gee and Associates Ltd, UK James Roy, Senior Naval Architect, Nigel Gee
Voith Water Tractor Improved Manoeuvrability and Seakeeping Behaviour
 Amsterdam, The Netherlands Organised by the ABR Company Ltd Day Paper No. 2 9 Voith Water Tractor Improved Manoeuvrability and Seakeeping Behaviour Dr Dirk Jürgens and Michael Palm, Voith Turbo Schneider
Amsterdam, The Netherlands Organised by the ABR Company Ltd Day Paper No. 2 9 Voith Water Tractor Improved Manoeuvrability and Seakeeping Behaviour Dr Dirk Jürgens and Michael Palm, Voith Turbo Schneider
Comparative Stability Analysis of a Frigate According to the Different Navy Rules in Waves
 Comparative Stability Analysis of a Frigate According to the Different Navy Rules in Waves ABSTRACT Emre Kahramano lu, Technical University, emrek@yildiz.edu.tr Hüseyin Y lmaz,, hyilmaz@yildiz.edu.tr Burak
Comparative Stability Analysis of a Frigate According to the Different Navy Rules in Waves ABSTRACT Emre Kahramano lu, Technical University, emrek@yildiz.edu.tr Hüseyin Y lmaz,, hyilmaz@yildiz.edu.tr Burak
WATER-FREE IOM MEASUREMENT IOMICA, 2005 March 4
 WATER-FREE IOM MEASUREMENT IOMICA, 2005 March 4 The IOM has grown to become the most broadly accepted radio sailing class worldwide. To a large degree that success can be attributed to a strong set of
WATER-FREE IOM MEASUREMENT IOMICA, 2005 March 4 The IOM has grown to become the most broadly accepted radio sailing class worldwide. To a large degree that success can be attributed to a strong set of
DAMAGE STABILITY TESTS OF MODELS REPRESENTING RO-RC) FERRIES PERFORMED AT DMI
 FERRIES PERFORMED AT DMI") TECHNISCHE UNIVERSITET laboratoriurn vow Scheepshydromechareba slechlef Meketweg 2, 2628 CD. Delft Tel.: 015-788873 - Fax 015-781838 DAMAGE STABILITY TESTS OF MODELS REPRESENTING RO-RC) FERRIES PERFORMED
TECHNISCHE UNIVERSITET laboratoriurn vow Scheepshydromechareba slechlef Meketweg 2, 2628 CD. Delft Tel.: 015-788873 - Fax 015-781838 DAMAGE STABILITY TESTS OF MODELS REPRESENTING RO-RC) FERRIES PERFORMED
Selecting Monohull, Catamaran and Trimaran as Suitable Passenger Vessels Based on Stability and Seakeeping Criteria
 Selecting Monohull, Catamaran and Trimaran as Suitable Passenger Vessels Based on Stability and Seakeeping Criteria Richard B Luhulima 1, D Setyawan 2, and I K A P Utama 3 1. PhD Student Dept. of Naval
Selecting Monohull, Catamaran and Trimaran as Suitable Passenger Vessels Based on Stability and Seakeeping Criteria Richard B Luhulima 1, D Setyawan 2, and I K A P Utama 3 1. PhD Student Dept. of Naval
The influence of the bow shape on the operability of a fast ship in a seaway
 The influence of the bow shape on the operability of a fast ship in a seaway by J.A.Keuning, Shiphydromechanics Laboratory Delft University of Technology, j.a.keuning@tudelft.nl Summary J.L.Gelling, Damen
The influence of the bow shape on the operability of a fast ship in a seaway by J.A.Keuning, Shiphydromechanics Laboratory Delft University of Technology, j.a.keuning@tudelft.nl Summary J.L.Gelling, Damen
Study of Passing Ship Effects along a Bank by Delft3D-FLOW and XBeach1
 Study of Passing Ship Effects along a Bank by Delft3D-FLOW and XBeach1 Minggui Zhou 1, Dano Roelvink 2,4, Henk Verheij 3,4 and Han Ligteringen 2,3 1 School of Naval Architecture, Ocean and Civil Engineering,
Study of Passing Ship Effects along a Bank by Delft3D-FLOW and XBeach1 Minggui Zhou 1, Dano Roelvink 2,4, Henk Verheij 3,4 and Han Ligteringen 2,3 1 School of Naval Architecture, Ocean and Civil Engineering,
roaming rates Designers push the envelope to save fuel on long-range motor yachts.
 Reduced roaming rates Designers push the envelope to save fuel on long-range motor yachts. Steven Davis The wise-guy answer to the question, How do you save fuel on a motor yacht? is: You pull back the
Reduced roaming rates Designers push the envelope to save fuel on long-range motor yachts. Steven Davis The wise-guy answer to the question, How do you save fuel on a motor yacht? is: You pull back the
CERTIFICATES OF COMPETENCY IN THE MERCHANT NAVY MARINE ENGINEER OFFICER
 CERTIFICATES OF COMPETENCY IN THE MERCHANT NAVY MARINE ENGINEER OFFICER EXAMINATIONS ADMINISTERED BY THE SCOTTISH QUALIFICATIONS AUTHORITY ON BEHALF OF THE MARITIME AND COASTGUARD AGENCY STCW 95 CHIEF
CERTIFICATES OF COMPETENCY IN THE MERCHANT NAVY MARINE ENGINEER OFFICER EXAMINATIONS ADMINISTERED BY THE SCOTTISH QUALIFICATIONS AUTHORITY ON BEHALF OF THE MARITIME AND COASTGUARD AGENCY STCW 95 CHIEF
A New Approach to the Derivation of V-Line Criteria for a Range of Naval Vessels
 A New Approach to the Derivation of V-Line Criteria for a Range of Naval Vessels Andrew Peters 1, Rick Goddard 2 and Nick Dawson 1 1. QinetiQ, Haslar Marine Technology Park (UK) 2. Steller Systems Ltd.,
A New Approach to the Derivation of V-Line Criteria for a Range of Naval Vessels Andrew Peters 1, Rick Goddard 2 and Nick Dawson 1 1. QinetiQ, Haslar Marine Technology Park (UK) 2. Steller Systems Ltd.,
SAMPLE MAT Proceedings of the 10th International Conference on Stability of Ships
 and Ocean Vehicles 1 Application of Dynamic V-Lines to Naval Vessels Matthew Heywood, BMT Defence Services Ltd, mheywood@bm tdsl.co.uk David Smith, UK Ministry of Defence, DESSESea-ShipStab1@mod.uk ABSTRACT
and Ocean Vehicles 1 Application of Dynamic V-Lines to Naval Vessels Matthew Heywood, BMT Defence Services Ltd, mheywood@bm tdsl.co.uk David Smith, UK Ministry of Defence, DESSESea-ShipStab1@mod.uk ABSTRACT
A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL
 A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL L Boddy and T Clarke, Austal Ships, Australia SUMMARY CFD analysis has been conducted on a 100m catamaran hull
A STUDY OF THE LOSSES AND INTERACTIONS BETWEEN ONE OR MORE BOW THRUSTERS AND A CATAMARAN HULL L Boddy and T Clarke, Austal Ships, Australia SUMMARY CFD analysis has been conducted on a 100m catamaran hull
INCREASE OPERATING DAYS ENHANCE DECK SAFETY AND SPEED MINIMIZE SEA SICKNESS HEAVY DUTY GYROSTABILIZERS FOR COMMERCIAL & DEFENCE APPLICATIONS
 LESS MOTION MORE OCEAN HEAVY DUTY GYROSTABILIZERS FOR COMMERCIAL & DEFENCE APPLICATIONS INCREASE OPERATING DAYS ENHANCE DECK SAFETY AND SPEED MINIMIZE SEA SICKNESS 2 VEEM Gyro DEFENCE Image courtesy of
LESS MOTION MORE OCEAN HEAVY DUTY GYROSTABILIZERS FOR COMMERCIAL & DEFENCE APPLICATIONS INCREASE OPERATING DAYS ENHANCE DECK SAFETY AND SPEED MINIMIZE SEA SICKNESS 2 VEEM Gyro DEFENCE Image courtesy of
Experimental Study on the Large Roll Motion of a ROPAX Ship in the Following and Quartering Waves
 Experimental Study on the Large Roll Motion of a ROPAX Ship in the Following and Quartering Waves Sun Young Kim, Nam Sun Son, Hyeon Kyu Yoon Maritime & Ocean Engineering Research Institute, KORDI ABSTRACT
Experimental Study on the Large Roll Motion of a ROPAX Ship in the Following and Quartering Waves Sun Young Kim, Nam Sun Son, Hyeon Kyu Yoon Maritime & Ocean Engineering Research Institute, KORDI ABSTRACT
Ship Stability. Ch. 8 Curves of Stability and Stability Criteria. Spring Myung-Il Roh
 Lecture Note of Naval Architectural Calculation Ship Stability Ch. 8 Curves of Stability and Stability Criteria Spring 2016 Myung-Il Roh Department of Naval Architecture and Ocean Engineering Seoul National
Lecture Note of Naval Architectural Calculation Ship Stability Ch. 8 Curves of Stability and Stability Criteria Spring 2016 Myung-Il Roh Department of Naval Architecture and Ocean Engineering Seoul National
MOTION CONTROL IN WAVES OF A 140M SES
 OS5-2 Proceedings of the 7th JFPS International Symposium on Fluid Power, TOYAMA 2008 September 15-18, 2008 MOTION CONTROL IN WAVES OF A 140M SES Naoki OHBA*, Taketsune MATSUMURA*, Akihiko IMAKITA* * Basic
OS5-2 Proceedings of the 7th JFPS International Symposium on Fluid Power, TOYAMA 2008 September 15-18, 2008 MOTION CONTROL IN WAVES OF A 140M SES Naoki OHBA*, Taketsune MATSUMURA*, Akihiko IMAKITA* * Basic
WAVE IMPACTS DUE TO STEEP FRONTED WAVES
 WAVE IMPACTS DUE TO STEEP FRONTED WAVES Bas Buchner and Arjan Voogt Maritime Research Institute Netherlands (MARIN) b.buchner@marin.nl, a.j.voogt@marin.nl INTRODUCTION It is the question whether Rogue
WAVE IMPACTS DUE TO STEEP FRONTED WAVES Bas Buchner and Arjan Voogt Maritime Research Institute Netherlands (MARIN) b.buchner@marin.nl, a.j.voogt@marin.nl INTRODUCTION It is the question whether Rogue
FORECASTING OF ROLLING MOTION OF SMALL FISHING VESSELS UNDER FISHING OPERATION APPLYING A NON-DETERMINISTIC METHOD
 8 th International Conference on 633 FORECASTING OF ROLLING MOTION OF SMALL FISHING VESSELS UNDER FISHING OPERATION APPLYING A NON-DETERMINISTIC METHOD Nobuo Kimura, Kiyoshi Amagai Graduate School of Fisheries
8 th International Conference on 633 FORECASTING OF ROLLING MOTION OF SMALL FISHING VESSELS UNDER FISHING OPERATION APPLYING A NON-DETERMINISTIC METHOD Nobuo Kimura, Kiyoshi Amagai Graduate School of Fisheries
New Vessel Fuel Efficient Design and Construction Considerations Medium and Long-Term Options
 New Vessel Fuel Efficient Design and Construction Considerations Medium and Long-Term Options By Dag Friis Christian Knapp Bob McGrath Ocean Engineering Research Centre MUN Engineering Overview : Introduction
New Vessel Fuel Efficient Design and Construction Considerations Medium and Long-Term Options By Dag Friis Christian Knapp Bob McGrath Ocean Engineering Research Centre MUN Engineering Overview : Introduction
Vessel Modification and Hull Maintenance Considerations Options & Pay Back Period or Return On Investments
 Vessel Modification and Hull Maintenance Considerations Options & Pay Back Period or Return On Investments By Dag Friis Christian Knapp Bob McGrath Ocean Engineering Research Centre MUN Engineering 1 Overview:
Vessel Modification and Hull Maintenance Considerations Options & Pay Back Period or Return On Investments By Dag Friis Christian Knapp Bob McGrath Ocean Engineering Research Centre MUN Engineering 1 Overview:
The Physics of Water Ballast
 The Physics of Water Ballast Nick Newland recently wrote an informative article on water ballast for Water Craft magazine (Newland 2015). Following a discussion on the Swallow Boats Association Forum,
The Physics of Water Ballast Nick Newland recently wrote an informative article on water ballast for Water Craft magazine (Newland 2015). Following a discussion on the Swallow Boats Association Forum,
A Feasibility Study on a New Trimaran PCC in Medium Speed
 The 6 th International Workshop on Ship ydrodynamics, IWS 010 January 9-1, 010, arbin, China Feasibility Study on a ew Trimaran PCC in Medium Speed Tatsuhiro Mizobe 1*, Yasunori ihei 1 and Yoshiho Ikeda
The 6 th International Workshop on Ship ydrodynamics, IWS 010 January 9-1, 010, arbin, China Feasibility Study on a ew Trimaran PCC in Medium Speed Tatsuhiro Mizobe 1*, Yasunori ihei 1 and Yoshiho Ikeda
Crew Transfer Vessel (CTV) Performance Benchmarking. Presented by Stephen Phillips of Seaspeed Marine Consulting Ltd
 Performance Benchmarking. Presented by Stephen Phillips of Seaspeed Marine Consulting Ltd") Crew Transfer Vessel (CTV) Performance Benchmarking Presented by Stephen Phillips of Seaspeed Marine Consulting Ltd BACKGROUND - CT OWA : The Carbon Trust Offshore Wind Accelerator (OWA) brings together
Crew Transfer Vessel (CTV) Performance Benchmarking Presented by Stephen Phillips of Seaspeed Marine Consulting Ltd BACKGROUND - CT OWA : The Carbon Trust Offshore Wind Accelerator (OWA) brings together
MISSION BASED HYDRODYNAMIC DESIGN OF A HYDROGRAPHIC SURVEY VESSEL
 MISSION BASED HYDRODYNAMIC DESIGN OF A HYDROGRAPHIC SURVEY VESSEL S.L. Toxopeus 1, P.F. van Terwisga 2 and C.H. Thill 1 1 Maritime Research Institute Netherlands (MARIN) Haagsteeg 2, Wageningen, NL 2 Royal
MISSION BASED HYDRODYNAMIC DESIGN OF A HYDROGRAPHIC SURVEY VESSEL S.L. Toxopeus 1, P.F. van Terwisga 2 and C.H. Thill 1 1 Maritime Research Institute Netherlands (MARIN) Haagsteeg 2, Wageningen, NL 2 Royal
Background material and considerations of sea-state limitations for helicopter landing and take-off on passenger ships and ferries are undertaken.
 1 Annex 7 Weather Conditions and Helicopter Landing Background material and considerations of sea-state limitations for helicopter landing and take-off on passenger ships and ferries are undertaken. 1
1 Annex 7 Weather Conditions and Helicopter Landing Background material and considerations of sea-state limitations for helicopter landing and take-off on passenger ships and ferries are undertaken. 1
Chapter 2 Hydrostatics and Control
 Chapter 2 Hydrostatics and Control Abstract A submarine must conform to Archimedes Principle, which states that a body immersed in a fluid has an upward force on it (buoyancy) equal to the weight of the
Chapter 2 Hydrostatics and Control Abstract A submarine must conform to Archimedes Principle, which states that a body immersed in a fluid has an upward force on it (buoyancy) equal to the weight of the
Seakeeping Tests (with ships) Experimental Methods in Marine Hydrodynamics Lecture in week 43
 Experimental Methods in Marine Hydrodynamics Lecture in week 43") Seakeeping Tests (with ships) Experimental Methods in Marine Hydrodynamics Lecture in week 43 1 Topics Why do seakeeping tests? What to do? Activities Details of model test set-up and instrumentation Waves
Seakeeping Tests (with ships) Experimental Methods in Marine Hydrodynamics Lecture in week 43 1 Topics Why do seakeeping tests? What to do? Activities Details of model test set-up and instrumentation Waves
IACS URS11 defines the dimensioning wave load for ship design, but what does it mean from a statistical point of view?
 IACS URS11 defines the dimensioning wave load for ship design, but what does it mean from a statistical point of view? Seamocs meeting in Malta Gaute Storhaug, DNV Maritime 19th of March 2009 Overview
IACS URS11 defines the dimensioning wave load for ship design, but what does it mean from a statistical point of view? Seamocs meeting in Malta Gaute Storhaug, DNV Maritime 19th of March 2009 Overview
DP Ice Model Test of Arctic Drillship
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 211 ICE TESTING SESSION DP Ice Model Test of Arctic Drillship Torbjørn Hals Kongsberg Maritime, Kongsberg, Norway Fredrik
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 211 ICE TESTING SESSION DP Ice Model Test of Arctic Drillship Torbjørn Hals Kongsberg Maritime, Kongsberg, Norway Fredrik
THE BEHAVIOUR OF TUGS IN WAVES ASSISTING LNG CARRIERS DURING BERTHING ALONG OFFSHORE LNG TERMINALS
 Proceedings of OMAE 5 4 th International Conference on Offshore Mechanics and Arctic Engineering -7 June 5 Halkidiki, Greece THE BEHAVIOUR OF TUGS IN WAVES ASSISTING LNG CARRIERS DURING BERTHING ALONG
Proceedings of OMAE 5 4 th International Conference on Offshore Mechanics and Arctic Engineering -7 June 5 Halkidiki, Greece THE BEHAVIOUR OF TUGS IN WAVES ASSISTING LNG CARRIERS DURING BERTHING ALONG
A COST-BENEFIT ANALYSIS OF HULL VANE APPLICATION ON MOTOR YACHTS K
 SUMMARY A COST-BENEFIT ANALYSIS OF HULL VANE APPLICATION ON MOTOR YACHTS K Uithof, MSc., Hull Vane b.v., Netherlands B Bouckaert, MSc., Hull Vane b.v., Netherlands P G van Oossanen, B.Eng., Van Oossanen
SUMMARY A COST-BENEFIT ANALYSIS OF HULL VANE APPLICATION ON MOTOR YACHTS K Uithof, MSc., Hull Vane b.v., Netherlands B Bouckaert, MSc., Hull Vane b.v., Netherlands P G van Oossanen, B.Eng., Van Oossanen
An Investigation of a Safety Level in Terms of. Excessive Acceleration in Rough Seas
 Proceedings of the h International Conference on the Stability of Ships and Ocean Vehicles, 4-9 June 5, Glasgow, UK. An Investigation of a Safety Level in Terms of Excessive Acceleration in Rough Seas
Proceedings of the h International Conference on the Stability of Ships and Ocean Vehicles, 4-9 June 5, Glasgow, UK. An Investigation of a Safety Level in Terms of Excessive Acceleration in Rough Seas
The salient features of the 27m Ocean Shuttle Catamaran Hull Designs
 The salient features of the 27m Ocean Shuttle Catamaran Hull Designs The hull form is a semi-planing type catamaran. It employs a combination of symmetrical and asymmetrical sponson shapes, thereby combining
The salient features of the 27m Ocean Shuttle Catamaran Hull Designs The hull form is a semi-planing type catamaran. It employs a combination of symmetrical and asymmetrical sponson shapes, thereby combining
Performance of SSTH-70 after Delivery and Future of SSTH Masahiro Itabashi, Ryoji Michida Ishikawajima-Harima Heavy Industries Co.,Ltd.
 Performance of SSTH-70 after Delivery and Future of SSTH Masahiro Itabashi, Ryoji Michida Ishikawajima-Harima Heavy Industries Co.,Ltd. ABSTRUCT The SSTH-70 Ocean Arrow designed under the concept of the
Performance of SSTH-70 after Delivery and Future of SSTH Masahiro Itabashi, Ryoji Michida Ishikawajima-Harima Heavy Industries Co.,Ltd. ABSTRUCT The SSTH-70 Ocean Arrow designed under the concept of the
Dynamic Stability of Ships in Waves
 Gourlay, T.P. & Lilienthal, T. 2002 Dynamic stability of ships in waves. Proc. Pacific 2002 International Maritime Conference, Sydney, Jan 2002. ABSTRACT Dynamic Stability of Ships in Waves Tim Gourlay
Gourlay, T.P. & Lilienthal, T. 2002 Dynamic stability of ships in waves. Proc. Pacific 2002 International Maritime Conference, Sydney, Jan 2002. ABSTRACT Dynamic Stability of Ships in Waves Tim Gourlay
UNIFIED INTERPRETATION OF PROVISIONS OF IMO SAFETY, SECURITY AND ENVIRONMENT-RELATED CONVENTIONS
 E SUB-COMMITTEE ON CARRIAGE OF CARGOES AND CONTAINERS 3rd session Agenda item 10 CCC 3/10/4 30 June 2016 Original: ENGLISH UNIFIED INTERPRETATION OF PROVISIONS OF IMO SAFETY, SECURITY AND ENVIRONMENT-RELATED
E SUB-COMMITTEE ON CARRIAGE OF CARGOES AND CONTAINERS 3rd session Agenda item 10 CCC 3/10/4 30 June 2016 Original: ENGLISH UNIFIED INTERPRETATION OF PROVISIONS OF IMO SAFETY, SECURITY AND ENVIRONMENT-RELATED
AN UPDATE ON THE DEVELOPMENT OF THE HULL VANE
 AN UPDATE ON THE DEVELOPMENT OF THE HULL VANE K. Uithof 1, P. van Oossanen 1,2, N. Moerke 1,2, P.G. van Oossanen 1,2, and K.S. Zaaijer 2 1 Hull Vane B.V., Costerweg 1b, 6702 AA, Wageningen, Netherlands
AN UPDATE ON THE DEVELOPMENT OF THE HULL VANE K. Uithof 1, P. van Oossanen 1,2, N. Moerke 1,2, P.G. van Oossanen 1,2, and K.S. Zaaijer 2 1 Hull Vane B.V., Costerweg 1b, 6702 AA, Wageningen, Netherlands
THEYACHT. report. The leading magazine for the design, construction, management, ownership & operation of luxury yachts. Issue 114 June 2010
 THEYACHT The leading magazine for the design, construction, management, ownership & operation of luxury yachts report Issue 114 June 2010 Catamaran or Monohull? Two are better than one... Whether that
THEYACHT The leading magazine for the design, construction, management, ownership & operation of luxury yachts report Issue 114 June 2010 Catamaran or Monohull? Two are better than one... Whether that
Investigation of the Intact Stability Accident of the Multipurpose Vessel MS ROSEBURG
 Proceedings of the 12th International Conference on the Stability of Investigation of the Intact Stability Accident of the Multipurpose Vessel MS ROSEBURG Adele Lübcke, Institute of Ship Design and Ship
Proceedings of the 12th International Conference on the Stability of Investigation of the Intact Stability Accident of the Multipurpose Vessel MS ROSEBURG Adele Lübcke, Institute of Ship Design and Ship
Study on Resistance of Stepped Hull Fitted With Interceptor Plate
 39 Study on Resistance of Stepped Hull Fitted With Interceptor Plate Muhamad Asyraf bin Abdul Malek, a, and J.Koto, a,b,* a) Department of Aeronautic, Automotive and Ocean Engineering, Faculty of Mechanical
39 Study on Resistance of Stepped Hull Fitted With Interceptor Plate Muhamad Asyraf bin Abdul Malek, a, and J.Koto, a,b,* a) Department of Aeronautic, Automotive and Ocean Engineering, Faculty of Mechanical
Abstract. 1 Introduction
 A computational method for calculatingthe instantaneous restoring coefficients for a ship moving in waves N. El-Simillawy College of Engineering and Technology, Arab Academyfor Science and Technology,
A computational method for calculatingthe instantaneous restoring coefficients for a ship moving in waves N. El-Simillawy College of Engineering and Technology, Arab Academyfor Science and Technology,
Figure 1: The squat effect. (Top) Ship at rest. (Bottom) Ship under way.
 Ship at rest. (Bottom) Ship under way.") Under-Keel Clearance of Frigates and Destroyers in Shallow Water Tim Gourlay, Centre for Marine Science and Technology, Curtin University CMST Research Report 013-53 Abstract For RAN ships operating in
Under-Keel Clearance of Frigates and Destroyers in Shallow Water Tim Gourlay, Centre for Marine Science and Technology, Curtin University CMST Research Report 013-53 Abstract For RAN ships operating in
Ship Resistance and Propulsion Prof. Dr. P. Krishnankutty Ocean Department Indian Institute of Technology, Madras
 Ship Resistance and Propulsion Prof. Dr. P. Krishnankutty Ocean Department Indian Institute of Technology, Madras Lecture - 7 Air and Wind Resistance Dimensional Analysis I Coming back to the class, we
Ship Resistance and Propulsion Prof. Dr. P. Krishnankutty Ocean Department Indian Institute of Technology, Madras Lecture - 7 Air and Wind Resistance Dimensional Analysis I Coming back to the class, we
Three New Concepts of Multi-Hulls
 Three New Concepts of Multi-Hulls Victor A. Dubrovsky Independent designer, Russian Federation 114-71 Budapeshtskaja Str, St.Petersburg, 192283, Russian Federation Multi-hulls@yandex.ru Abstract Many multi-hull
Three New Concepts of Multi-Hulls Victor A. Dubrovsky Independent designer, Russian Federation 114-71 Budapeshtskaja Str, St.Petersburg, 192283, Russian Federation Multi-hulls@yandex.ru Abstract Many multi-hull
Crew Transfer Vessel (CTV) Performance Plot (P-Plot) Development
 Performance Plot (P-Plot) Development") Research Project Summary June 2017 Crew Transfer Vessel (CTV) Performance Plot (P-Plot) Development Notice to the Offshore Wind Energy Sector SUMMARY This R&D Summary describes the results of research
Research Project Summary June 2017 Crew Transfer Vessel (CTV) Performance Plot (P-Plot) Development Notice to the Offshore Wind Energy Sector SUMMARY This R&D Summary describes the results of research
SECOND ENGINEER REG III/2 NAVAL ARCHITECTURE
 SECOND ENGINEER REG III/2 NAVAL ARCHITECTURE LIST OF TOPICS A B C D E F G H I J Hydrostatics Simpson's Rule Ship Stability Ship Resistance Admiralty Coefficients Fuel Consumption Ship Terminology Ship
SECOND ENGINEER REG III/2 NAVAL ARCHITECTURE LIST OF TOPICS A B C D E F G H I J Hydrostatics Simpson's Rule Ship Stability Ship Resistance Admiralty Coefficients Fuel Consumption Ship Terminology Ship
OPERATIONS SEAFARER CERTIFICATION GUIDANCE NOTE SA MARITIME QUALIFICATIONS CODE
 Page 1 of 8 Compiled by Chief Examiner Approved by Qualifications Committee: 27 September 2013 OPERATIONS SEAFARER CERTIFICATION GUIDANCE NOTE SA MARITIME QUALIFICATIONS CODE Page 2 of 8 KNOWLEDGE, UNDERSTANDING
Page 1 of 8 Compiled by Chief Examiner Approved by Qualifications Committee: 27 September 2013 OPERATIONS SEAFARER CERTIFICATION GUIDANCE NOTE SA MARITIME QUALIFICATIONS CODE Page 2 of 8 KNOWLEDGE, UNDERSTANDING
Subj: Explanation of Upper Level Capacity and Stability Characteristics for Rolling Boat, Inc. Vessels.
 23 Apr, 2009 From: Tullio Celano III P.E. To: Underwriters of Rolling Boat, Inc. Via: Phil Kazmierowicz, President, Rolling Boat, Inc. Subj: Explanation of Upper Level Capacity and Stability Characteristics
23 Apr, 2009 From: Tullio Celano III P.E. To: Underwriters of Rolling Boat, Inc. Via: Phil Kazmierowicz, President, Rolling Boat, Inc. Subj: Explanation of Upper Level Capacity and Stability Characteristics
Experience and Future Potential of the Oblique Icebreaker
 SHIP Design & Engineering CONSULTING & Project Development ICE MODEL & Full Scale Testing OFFSHORE Development Experience and Future Potential of the Oblique Icebreaker Mika Hovilainen Project Manager
SHIP Design & Engineering CONSULTING & Project Development ICE MODEL & Full Scale Testing OFFSHORE Development Experience and Future Potential of the Oblique Icebreaker Mika Hovilainen Project Manager
A STUDY ON FACTORS RELATED TO THE CAPSIZING ACCIDENT OF A FISHING VESSEL RYUHO MARU No.5
 8 th International Conference on 49 A STUDY ON FACTORS RELATED TO THE CAPSIZING ACCIDENT OF A FISHING VESSEL RYUHO MARU No.5 Harukuni Taguchi, Shigesuke Ishida, Iwao Watanabe, Hiroshi Sawada, Masaru Tsujimoto,
8 th International Conference on 49 A STUDY ON FACTORS RELATED TO THE CAPSIZING ACCIDENT OF A FISHING VESSEL RYUHO MARU No.5 Harukuni Taguchi, Shigesuke Ishida, Iwao Watanabe, Hiroshi Sawada, Masaru Tsujimoto,
At 60 metres and crowned by ten square-rigged sails Stavros S Niarchos cuts an impressive sight whether heeling under the wind or cruising the calms
 STAVROS S NIARCHOS At 60 metres and crowned by ten square-rigged sails Stavros S Niarchos cuts an impressive sight whether heeling under the wind or cruising the calms of distant shores. Currently used
STAVROS S NIARCHOS At 60 metres and crowned by ten square-rigged sails Stavros S Niarchos cuts an impressive sight whether heeling under the wind or cruising the calms of distant shores. Currently used
Application and Development of Multi-Hulls
 April 20, 204 Application and Development of Multi-Hulls a) Balt Techno Prom, St.Petersburg, Russia Victor A. Dubrovsky, a,* *Corresponding author: multi-hulls@yandex.ru Paper History Received: 8-January-204
April 20, 204 Application and Development of Multi-Hulls a) Balt Techno Prom, St.Petersburg, Russia Victor A. Dubrovsky, a,* *Corresponding author: multi-hulls@yandex.ru Paper History Received: 8-January-204
Part 5: Mooring forces and vessel behaviour in locks Experience in Belgium. Mooring forces and vessel behaviour in locks:
 PIANC Workshop 13-14th 14th September 211 Part 5: Mooring forces and vessel behaviour in locks Experience in Belgium By T. DE MULDER & M. VANTORRE BELGIUM Mooring forces and vessel behaviour in locks:
PIANC Workshop 13-14th 14th September 211 Part 5: Mooring forces and vessel behaviour in locks Experience in Belgium By T. DE MULDER & M. VANTORRE BELGIUM Mooring forces and vessel behaviour in locks:
Dynamic Positioning Control Augmentation for Jack-up Vessels
 DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
Note to Shipbuilders, shipowners, ship Managers and Masters. Summary
 MARINE GUIDANCE NOTE MGN 301 (M+F) Manoeuvring Information on Board Ships Note to Shipbuilders, shipowners, ship Managers and Masters This note supersedes Marine Guidance Note MGN 201 (M+F) Summary The
MARINE GUIDANCE NOTE MGN 301 (M+F) Manoeuvring Information on Board Ships Note to Shipbuilders, shipowners, ship Managers and Masters This note supersedes Marine Guidance Note MGN 201 (M+F) Summary The
SAFETY. Facile et confortable
 SAFETY The width of NEEL trimaransis an important factor for safety on the high seas because it is a guarantee of stability On a catamaran the maximum righting moment occurs at 12 heeling, as shown on
SAFETY The width of NEEL trimaransis an important factor for safety on the high seas because it is a guarantee of stability On a catamaran the maximum righting moment occurs at 12 heeling, as shown on
ANCHORING REQUIREMENTS FOR LARGE CONTAINER SHIPS
 ANCHORING REQUIREMENTS FOR LARGE CONTAINER SHIPS 1 INTRODUCTION 1.1 Background Some modern container ships are larger than most of the existing fleet, whose experience has been used as the basis of classification
ANCHORING REQUIREMENTS FOR LARGE CONTAINER SHIPS 1 INTRODUCTION 1.1 Background Some modern container ships are larger than most of the existing fleet, whose experience has been used as the basis of classification
Heavy duty gyro stabilizers for commercial & Defence applications
 Increase operating days Enhance deck safety & speed Minimise sea sickness Heavy duty gyro stabilizers for commercial & Defence applications LESS MOTION MORE OCEAN The latest technology in stabilization
Increase operating days Enhance deck safety & speed Minimise sea sickness Heavy duty gyro stabilizers for commercial & Defence applications LESS MOTION MORE OCEAN The latest technology in stabilization
Sample Application of Second Generation IMO Intact Stability Vulnerability Criteria as Updated during SLF 55
 1 Sample Application of Second Generation IMO Intact Stability Vulnerability Criteria as Updated during SLF 55 Clève Wandji, Bureau Veritas Philippe Corrignan, Bureau Veritas ABSTRACT A second generation
1 Sample Application of Second Generation IMO Intact Stability Vulnerability Criteria as Updated during SLF 55 Clève Wandji, Bureau Veritas Philippe Corrignan, Bureau Veritas ABSTRACT A second generation
ITTC Recommended Procedures and Guidelines
 Page 1 of 7 Table of Contents 2 1. PURPOSE... 2 2. PARAMETERS... 2 2.2. General Considerations... 2 2.3. Special Requirements for Ro-Ro Ferries... 3 3.3. Instrumentation... 4 3.4. Preparation... 5 3.5.
Page 1 of 7 Table of Contents 2 1. PURPOSE... 2 2. PARAMETERS... 2 2.2. General Considerations... 2 2.3. Special Requirements for Ro-Ro Ferries... 3 3.3. Instrumentation... 4 3.4. Preparation... 5 3.5.
The below identified patent application is available for licensing. Requests for information should be addressed to:
 DEPARTMENT OF THE NAVY OFFICE OF COUNSEL NAVAL UNDERSEA WARFARE CENTER DIVISION 1176 HOWELL STREET NEWPORT Rl 02841-1708 IN REPLY REFER TO Attorney Docket No. 300170 20 March 2018 The below identified
DEPARTMENT OF THE NAVY OFFICE OF COUNSEL NAVAL UNDERSEA WARFARE CENTER DIVISION 1176 HOWELL STREET NEWPORT Rl 02841-1708 IN REPLY REFER TO Attorney Docket No. 300170 20 March 2018 The below identified
DESIGN COMMENTS #35-95 Submarine support ocean passagemaker
 w: www.bury.com.au e: info@bury.com.au PO Box 17 Metung VIC 3904 Australia t: +61 (0) 3 9005 6301 : +61 (0) 3 8648 6891 Project: Design 35 95 submarine support Task: Preliminary design comments By: pb
w: www.bury.com.au e: info@bury.com.au PO Box 17 Metung VIC 3904 Australia t: +61 (0) 3 9005 6301 : +61 (0) 3 8648 6891 Project: Design 35 95 submarine support Task: Preliminary design comments By: pb
Long and flat or beamy and deep V-bottom An effective alternative to deep V-bottom
 Boat dual chines and a narrow planing bottom with low deadrise Long and flat or beamy and deep V-bottom An effective alternative to deep V-bottom Here is a ground-breaking powerboat concept with high efficiency
Boat dual chines and a narrow planing bottom with low deadrise Long and flat or beamy and deep V-bottom An effective alternative to deep V-bottom Here is a ground-breaking powerboat concept with high efficiency
Experimental Results of Motion Responses of High Speed Marine Crafts. Magnús Þór Jónsson
 Experimental Results of Motion Responses of High Speed Marine Crafts Magnús Þór Jónsson March 2016 Content 1. Introduction... 3 2. Evaluation criteria... 5 3. Instrumentation and measurements... 6 4. Results...
Experimental Results of Motion Responses of High Speed Marine Crafts Magnús Þór Jónsson March 2016 Content 1. Introduction... 3 2. Evaluation criteria... 5 3. Instrumentation and measurements... 6 4. Results...
1. A tendency to roll or heel when turning (a known and typically constant disturbance) 2. Motion induced by surface waves of certain frequencies.
 2. Motion induced by surface waves of certain frequencies.") Department of Mechanical Engineering Massachusetts Institute of Technology 2.14 Analysis and Design of Feedback Control Systems Fall 2004 October 21, 2004 Case Study on Ship Roll Control Problem Statement:
Department of Mechanical Engineering Massachusetts Institute of Technology 2.14 Analysis and Design of Feedback Control Systems Fall 2004 October 21, 2004 Case Study on Ship Roll Control Problem Statement:
On the Challenges of Analysis and Design of Turret-Moored FPSOs in Squalls
 On the Challenges of Analysis and Design of Turret-Moored FPSOs in Squalls Arun Duggal Amir Izadparast Yu Ding 19th SNAME Offshore Symposium 6 February 2014 Overview Squalls, History & Current Practice
On the Challenges of Analysis and Design of Turret-Moored FPSOs in Squalls Arun Duggal Amir Izadparast Yu Ding 19th SNAME Offshore Symposium 6 February 2014 Overview Squalls, History & Current Practice
Sea State Estimation from an Advancing Ship
 Sea State Estimation from an Advancing Ship The wave buoy analogy Ulrik Dam Nielsen and Ingrid Marie Vincent Andersen Technical University of Denmark Presentation at Skibsteknisk Selskab March 5 th, 2012,
Sea State Estimation from an Advancing Ship The wave buoy analogy Ulrik Dam Nielsen and Ingrid Marie Vincent Andersen Technical University of Denmark Presentation at Skibsteknisk Selskab March 5 th, 2012,
WIND TURBINE SHUTTLE HUISMAN PRODUCT BROCHURE
 WIND TURBINE SHUTTLE HUISMAN PRODUCT BROCHURE WIND TURBINE HUTTLE TABLE OF CONTENTS 01 DESCRIPTION 03 1.1 Vessel General 03 1. Purpose of the Vessel 0 1.3 High Workability 0 1. Installation Scenarios 05
WIND TURBINE SHUTTLE HUISMAN PRODUCT BROCHURE WIND TURBINE HUTTLE TABLE OF CONTENTS 01 DESCRIPTION 03 1.1 Vessel General 03 1. Purpose of the Vessel 0 1.3 High Workability 0 1. Installation Scenarios 05
APARTMENT BARGES A COMFORT AND SAFETY ANALYSIS
 Master Thesis 0304 ISSN 1651-7660 Skrift 003-7 APARTMENT BARGES A COMFORT AND SAFETY ANALYSIS M Sc Thesis by Sebastian Brunes Stockholm 003 Aeronautical and Vehicle Engineering Division of Naval Systems
Master Thesis 0304 ISSN 1651-7660 Skrift 003-7 APARTMENT BARGES A COMFORT AND SAFETY ANALYSIS M Sc Thesis by Sebastian Brunes Stockholm 003 Aeronautical and Vehicle Engineering Division of Naval Systems
Ship Resistance and Propulsion Prof. Dr. P. Krishnankutty Ocean Department Indian Institute of Technology, Madras
 Ship Resistance and Propulsion Prof. Dr. P. Krishnankutty Ocean Department Indian Institute of Technology, Madras Lecture - 6 Bulbous Bow on Ship Resistance Welcome back to the class we have been discussing
Ship Resistance and Propulsion Prof. Dr. P. Krishnankutty Ocean Department Indian Institute of Technology, Madras Lecture - 6 Bulbous Bow on Ship Resistance Welcome back to the class we have been discussing
EVOLUTION PACKAGE. Set your destination, sit back, relax and let your Aquanima take you there with a complete peace of mind!
 AQUANIMA CONCEPT Solar electric yachts form a new class of their own. They offer an unprecedented sailing experience in perfect symbiosis with the ocean. They combine the silence of sails with the convenience
AQUANIMA CONCEPT Solar electric yachts form a new class of their own. They offer an unprecedented sailing experience in perfect symbiosis with the ocean. They combine the silence of sails with the convenience
NEW CLASSIC YACHTS - SY KEALOHA
 NEW CLASSIC YACHTS - CLAASEN SHIPYARDS NEW CLASSIC YACHTS - Classic Yachts with a modern twist The Dutch are known for their straightforward approach to life and business, and this is also reflected in
NEW CLASSIC YACHTS - CLAASEN SHIPYARDS NEW CLASSIC YACHTS - Classic Yachts with a modern twist The Dutch are known for their straightforward approach to life and business, and this is also reflected in
Engineering Practice on Ice Propeller Strength Assessment Based on IACS Polar Ice Rule URI3
 10th International Symposium on Practical Design of Ships and Other Floating Structures Houston, Texas, United States of America 2007 American Bureau of Shipping Engineering Practice on Ice Propeller Strength
10th International Symposium on Practical Design of Ships and Other Floating Structures Houston, Texas, United States of America 2007 American Bureau of Shipping Engineering Practice on Ice Propeller Strength
World Marine Offshore Torskekaj Esbjerg, Denmark
 WS30 WORLD BORA Vessel Specification MULTIPURPOSE OFFSHORE SUPPORT Suitable for transfer of crew and cargo to wind industry, crew change vessel, survey, ROV, standby, rescue and guard duties. The vessel
WS30 WORLD BORA Vessel Specification MULTIPURPOSE OFFSHORE SUPPORT Suitable for transfer of crew and cargo to wind industry, crew change vessel, survey, ROV, standby, rescue and guard duties. The vessel
Operability Study for DP Vessel Operations at a Deep water Spar-A Decision Support Tool
 Operability Study for DP Vessel Operations at a Deep water Spar-A Decision Support Tool Xiaobing Shi, American Global Maritime Torbjørn Hals, Kongsberg Maritime AS Suman Muddusetti, Shell Oct. 11, 2011
Operability Study for DP Vessel Operations at a Deep water Spar-A Decision Support Tool Xiaobing Shi, American Global Maritime Torbjørn Hals, Kongsberg Maritime AS Suman Muddusetti, Shell Oct. 11, 2011