Submitted to JNP. Locomotor Adaptation to a Soleus EMG Controlled Antagonistic. of Physical Medicine and Rehabilitation, University of Michigan.
|
|
|
- Miranda Mills
- 6 years ago
- Views:
Transcription
1 Articles in PresS. J Neurophysiol (January 9, 2013). doi: /jn Submitted to JNP 1 2 Locomotor Adaptation to a Soleus EMG Controlled Antagonistic Exoskeleton Keith E. Gordon 1,4,5, Catherine R. Kinnaird 1,5 1, 2, 3, Daniel P. Ferris 1 School of Kinesiology, 2 Department of Biomedical Engineering and 3 Department of Physical Medicine and Rehabilitation, University of Michigan. 4 Department of Physical Medicine and Rehabilitation, Northwestern University Feinberg School of Medicine. 5 Sensory Motor Performance Program, Rehabilitation Institute of Chicago Running Head: Locomotor Adaptation to an Antagonistic Exoskeleton Corresponding Author: Keith E. Gordon Sensory Motor Performance Program Rehabilitation Institute of Chicago 345 E. Superior, Suite 1406 Chicago, IL USA keith-gordon@northwestern.edu Telephone: FAX: Copyright 2013 by the American Physiological Society.
2 Abstract Locomotor adaptation in humans is not well understood. To provide insight into the neural reorganization that occurs following a significant disruption to one s learned neuromuscular map relating a given motor command to its resulting muscular action, we tied the mechanical action of a robotic exoskeleton to the EMG profile of the soleus muscle during walking. The powered exoskeleton produced an ankle dorsiflexion torque proportional to soleus muscle recruitment thus limiting the soleus plantar flexion torque capability. We hypothesized that neurologically intact subjects would alter muscle activation patterns in response to the antagonistic exoskeleton by decreasing soleus recruitment. Subjects practiced walking with the exoskeleton for two thirty-minute sessions. The initial response to the perturbation was to fight the resistive exoskeleton by increasing soleus activation. By the end of training, subjects had significantly reduced soleus recruitment resulting in a gait pattern with almost no ankle push-off. In addition, there was a trend for subjects to reduce gastrocnemius recruitment in proportion to the soleus even though only the soleus EMG was used to control the exoskeleton. The results from this study demonstrate the ability of the nervous system to recalibrate locomotor output in response to substantial changes in the mechanical output of the soleus muscle and associated sensory feedback. This study provides further evidence that the human locomotor system of intact individuals is highly flexible and able to adapt to achieve effective locomotion in response to a broad range of neuromuscular perturbations. 2
3 Keywords: biomechanics, motor adaptation, motor learning, gait, exoskeleton, orthosis 3
4 Introduction How does the human locomotor control system adapt to perturbations to its neuromuscular map. Acute changes in either the gain or connections relating a given motor command to a desired muscular action can challenge one s ability to effectively walk. Humans are adept at compensating for common gain perturbations such as muscular fatigue during gait (Nessler et al. 2011). In instances of significant gain change, including muscle impairment, upper limb research suggests that the nervous system does not optimally modulate muscle activation patterns (de Rugy et al. 2012). On rare occasions, the mechanical action of a specific muscle is altered as occurs with tendon transfer. Currently, there is no consensus on whether humans can effectively adapt their locomotor patterns to acute changes in the connections of the neuromuscular map. Comparisons of locomotor muscle activation patterns pre- and post- muscle transplantation surgery has found both relatively unchanged activations in children with cerebral palsy (Perry and Hoffer 1977; Waters et al. 1982) and substantial modifications in patients with poliomyelitis (Close and Todd 1959; Sutherland et al. 1960). Evidence from controlled animal studies found the original locomotor EMG patterns persisted following nerve crossing or muscle transpositions surgeries (Forssberg and Svartengren 1983; Sperry 1945). Cumulatively, this research suggests that there may be limitations of the motor system to adapt to either significant gain or connection changes in the neuromuscular map. 4
5 We have previously employed robotic exoskeletons to investigate human adaptation to acute disruptions of the neuromuscular map of two plantar flexor muscles; soleus and gastrocnemius (Cain et al. 2007; Gordon and Ferris 2007; Kao et al. 2010a; Kinnaird and Ferris 2009). These two muscles typically display similar activation profiles during gait (Arsenault et al. 1986). However, physiologic differences between these muscles result in divergent biomechanical contributions to gait. The gastrocnemius is biarticular and contributes primarily to body weight support and leg swing initiation. The soleus is uniarticular and contributes to body weight support and serves as a primary contributor to forward propulsion (McGowan et al. 2009; McGowan et al. 2008; Neptune et al. 2001). Individuals modulate the recruitment of each muscle independently in response to the specific mechanical demands imposed during walking (Courtine et al. 2006; Gordon and Ferris 2007; Gottschall and Kram 2003; McGowan et al. 2008). This last property makes these muscle groups desirable for studying locomotor adaptation. We found that humans significantly reduced soleus recruitment when walking with a powered exoskeleton that acutely increased the gain between either soleus (Gordon and Ferris 2007; Kao et al. 2010a) or gastrocnemius (Kinnaird and Ferris 2009) activation and the resulting plantar flexor torque. This resulted in total (human + exoskeleton) ankle moments that were comparable to unassisted walking (Kao et al. 2010a). Subjects made both rapid adaptations to maintain ankle joint moments (Kao et al. 2010b) and slower adaptations to minimize negative work produced by the exoskeleton (Gordon and Ferris 2007; 5
6 Kinnaird and Ferris 2009). This research provides evidence that the human nervous system is proficient at making meaningful and independent adjustments to soleus and gastrocnemius activation profiles during gait in response to perturbations that disrupt the gain between a given efferent command and the resulting muscular output. To further study the adaptability of the human locomotor system it would be interesting to use the powered exoskeleton to impose a connection change on the neuromuscular map by modifying the function of the soleus from a plantar flexor to a dorsiflexor. As the exoskeleton can only create torques that supplement the actual mechanical output of the subjects existing muscles, this is not entirely possible. However, the exoskeleton can create an antagonistic torque proportional to activation of the soleus that will effectively negate the ability of the soleus to produce a plantar flexion torque. Such a co-activation setup would simulate an acute mechanical impairment of the soleus muscle. In the current experiment, we investigated the ability of humans to reorganized locomotor patterns when faced with a mechanical impairment of a single plantar flexor muscle. The impairment was imposed using a myoelectrically controlled exoskeleton that resisted the mechanical action of the soleus (Figure 1). The exoskeleton provided a real-time dorsiflexion torque proportional to the user s soleus electromyography (EMG) amplitude. This setup created an antagonistic coactivation about the ankle joint (human soleus plantar flexor torque vs. exoskeleton dorsiflexor torque) any time the user recruited their soleus muscle. This setup exposed subjects to a novel and substantial 6
7 perturbation to their neuromuscular map (activation of the soleus muscle independently would no longer produce a net plantar flexion torque). We first hypothesized that subjects would decrease soleus recruitment to minimize the energetically-costly effects of fighting the antagonistic exoskeleton configuration. In past experiments, subjects decreased soleus recruitment when the exoskeleton effectively increased plantar flexor torque of the soleus. In the current experiment, we believe that subjects will decrease soleus recruit as well. In this case, we theorize that decreases in soleus recruitment will be to minimize energetic costs rather than to maintain plantar flexor torque. Second, we hypothesized that subjects would increase gastrocnemius recruitment in an effort to offset decrements in plantar flexor torque resulting from the selective soleus impairment. Although the gastrocnemius may not be able to fully offset the biomechanical impact of a soleus impairment, both muscles do contribute to body weight support during gait. We theorize that individuals will increase gastrocnemius recruitment with the goal of maintaining normal plantar flexor moments about the ankle joint Methods 10 able-bodies subjects, (five male, five female; mean ± standard deviation (SD): age 27 ± 2.5 years, body mass 69.2 ± 10.3 kg and height 1.70 ± 0.11 m) gave written informed consent and participated in the study. The University of Michigan Medical School Institutional Review Board approved the protocol. All subjects were considered to be nonpathologic ambulators in good 7
8 health. With the exception of the antagonistic setup, the testing procedures used during this experiment were identical to those described in an earlier study (Gordon and Ferris 2007). We constructed a custom fit exoskeleton for each subject s left lower limb (Figure 1). Design specifications and mechanical performance of earlier versions of the exoskeleton have been described in detail (Ferris et al. 2005; Ferris et al. 2006; Gordon and Ferris 2007; Gordon et al. 2006). The exoskeleton consisted of a carbon fiber shank section and a polypropylene foot section. A metal hinge joint between the shank and foot sections permitted free sagittal plane rotation about the ankle. An artificial pneumatic muscle fastened between two steel brackets affixed to the dorsum of the foot and on the upper most anterior surface of the exoskeleton produced a dorsiflexor torque when pressurized. The average weight of the exoskeletons was 1.07 ± 0.09 (mean ± SD) kg. The artificial pneumatic muscle had an average moment arm length of 10.8 ± 0.9 cm (mean ± SD) when the ankle joint was placed in the neutral position. Moment arm lengths were assumed to be constant during walking. These small differences in exoskeleton weight and moment arm length were a result of anthropometric differences between subjects. Four parallel proportional pressure regulators (MAC Valves, Inc., Wixom, MI) transmitted compressed air to the artificial pneumatic muscle via nylon tubing (0-6.2 bar). An analog-controlled, solenoid valve (MAC Valves, Inc., Wixom, MI) connected in parallel with the air supply tubing facilitated exhaust. We used a desktop computer and real-time control board (dspace, Inc., 8
9 Northville, MI) to implement proportional myoelectric control of the artificial pneumatic muscle. We wrote custom software in Simulink (The Mathworks, Inc., Natick, MA) and converted it to ControlDesk (dspace, Inc., Northville, MI). The software regulated a 0-10 V analog signal that was sent to four proportional pressure regulators and solenoid valves working in parallel to control activation and deactivation of the artificial pneumatic muscles. The air pressure sent to the artificial pneumatic muscle was proportional to processed soleus electromyography (EMG) amplitude. For use as a real-time control signal, soleus EMG signals were high-pass filtered with a second-order Butterworth filter (cutoff frequency 20 Hz) to remove movement artifact, full wave rectified, and low-pass filtered with a second order Butterworth filter (cutoff frequency 10 Hz) to smooth the signal. These filters were selected for the real-time controller with the goal of limiting the number of computations performed that could potentially increase processing time when working with noisy signals. We applied threshold cutoffs to eliminate background noise and adjustable gains to scale the control signals. Gains and thresholds were typically identical between testing sessions for a given subject. Gains and thresholds were set each testing day from the processed realtime soleus EMG control signals generated during the Baseline walking condition. An initial multiplier was set such that peak soleus EMG amplitude (calculated from ten consecutive strides) would send a 10 V (maximal activation) signal to the pressure regulators. The value of the multiplier was doubled and this value was used as the gain for the remainder of the testing period. This resulted 9
10 in EMG amplitudes greater than 50% of the peak soleus EMG amplitude during the Baseline to send a 10 V signal to the pressure regulators. EMG amplitudes less than this value sent a proportional voltage between 0 and 10 V to the regulator. This method of setting the gain was instituted based on pilot studies to create a substantial mechanical perturbation and has been used in our previous research (Gordon and Ferris 2007). Thresholds were selected to remove baseline noise considered to be the period during swing between soleus activations. The force produced by an artificial pneumatic muscle is attributed to multiple factors. In isometric conditions, increasing activation (air pressure sent to the artificial pneumatic muscle) will increase its force production (Chou and Hannaford 1996). During dynamic conditions, such as walking, force produced by the artificial pneumatic muscle will be attributed to three primary factors: activation, length and bandwidth (Gordon et al. 2006). As a result, there is no simple linear gain relating real-time EMG amplitude to artificial muscle force or exoskeleton torque. In this experiment, the amplitude of the processed real-time soleus EMG control signals were used to directly control activation (air pressure sent to the artificial muscle) and as such the recruitment of the user s soleus directly influenced the resulting force produced by the artificial pneumatic muscle. Subjects completed two identical days of treadmill training with the exoskeleton. During each training day, subjects initially walked for 10 minutes with the exoskeleton passive (Baseline). Then the exoskeleton was powered using the antagonistic exoskeleton setup (human soleus activation vs. 10
11 exoskeleton dorsiflexor torque) and subjects walked for another 30 minutes (Resistance). Transitions between the two conditions were performed as the subject walked without stopping. For safety reasons, the subjects received a verbal warning immediately prior to the device being powered. The second training session was completed 72 hours after the first session. A 72-hour rest period was selected to allow the subjects to recover from potential muscle soreness and to allow sufficient time for motor consolidation to occur (Krakauer and Shadmehr 2006). Subjects had no prior experience wearing the exoskeleton before participating in the study. Subjects were instructed to walk in the manner that they felt most comfortable and to let their arms swing freely without holding onto the treadmill for support. We did not explicitly explain to the subjects how the exoskeleton would be controlled. We limited the amount of instructions subjects received with the objective of not biasing subjects natural, self-selected, gait parameters. All treadmill walking was performed at 1.25 m/s which is close to the preferred walking speed for healthy adults (Ralston 1958). During each session we recorded kinematic, kinetic, and electromyography data during the first 10 seconds of every minute that subjects walked on the treadmill. We placed twenty-nine reflective markers on the subject s pelvis and lower limbs and used an 8-camera video system (120 Hz, Motion Analysis Corporation, Santa Rosa, CA) to record three-dimensional kinematics. We collected foot-ground contact data using footswitches (1200 Hz, B & L Engineering, Tustin, CA) placed in each shoe. We recorded surface EMG (1200 Hz, Konigsberg Instruments, Inc., Pasadena, CA) from the left soleus, 11
12 tibialis anterior, medial gastrocnemius, lateral gastrocnemius, vastus lateralis, vastus medialis, rectus femoris and medial hamstring muscles using bipolar surface electrodes. The EMG amplifier had a bandwidth of 1000 Hz. To minimize crosstalk, we visually inspected EMG signals during manual muscle tests prior to walking and repositioned electrodes as necessary. We marked the location of the electrodes on the subject s skin using permanent marker to ensure constant electrode placement between training sessions. Artificial pneumatic muscle force was recorded using a tension compression force transducer (1200 Hz, Omega Engineering, Stamford, CT) placed in series with the artificial muscle. Subjects returned for a third testing session during which we recorded data during normal over ground walking at 1.25 m/s without the subject wearing the exoskeleton. The purpose of this third session was to examine subjects normal gait kinetics in order make an estimate of the relative resistance the powered exoskeleton created during the treadmill walking sessions. Over ground walking was performed because an instrumented force treadmill was not available for this study. During over ground walking, we collected ground reaction force data from two force plates in addition to the kinematic data described earlier. A stopwatch connected to two light triggers was used to determine over ground walking speed. For each subject we recorded 10 trials in which over ground walking speed had a less than 5% difference from the target 1.25 m/s treadmill walking speed. For the treadmill walking conditions we calculated average step cycle profiles for EMG, kinematic and kinetic variables for each subject using data from 12
13 each minute of walking. Average step cycle profiles were computed from all complete step cycles occurring during the 10-second recording period for each minute of walking. To examine changes in EMG amplitude, peak EMG values occurring during every gait cycle were detected for each subject for each minute of walking. High pass filtered (high pass, fourth-order Butterworth filter, cutoff frequency 20 Hz) and rectified EMG data were used to detect peak EMG values. In addition, we created step cycle profiles for ankle, knee and hip joint angles (lowpass, fourth-order Butterworth filter, cutoff frequency 6 Hz). To examine changes in kinematics across time we found the peak ankle plantar flexion angle occurring between 50-75% of the gait cycle ), a period when the ankle actively plantar flexes (Perry 1992). We also found the peak knee and hip extension occurring between 12-62% of the gait cycle, a period when ankle plantar flexion moments assist in creating knee extension (Perry 1992). Finally, to examine changes in exoskeleton kinetics we calculated exoskeleton dorsiflexor torque and created average step cycle exoskeleton mechanical power profiles. From exoskeleton power we calculated average exoskeleton positive, negative and total absolute mechanical work ( positive work + negative work ) during the step cycle. From the over ground walking data we calculated net torque about the ankle joint using commercial software (Visual3D, C-Motion, Inc., Rockville, MD) combining kinematic marker and force platform data. Lower limb inertial properties were estimated based on anthropometric measurements of the subjects (Zatsiorsky 2002). While there are differences in gait kinetics during 13
14 treadmill and over ground walking there do not appear to be differences in ankle joint powers over the full gait cycle or in the ankle moments from 30-50% of the gait cycle (Lee and Hidler 2008) which were the variables of interest in this study. In addition, the over ground data was not used for any statistical purposes; it was used solely to get a relative measure of the magnitude of the dorsiflexor moments produced by the exoskeleton during treadmill walking. We tested for differences in exoskeleton produced kinetics, lower limb gait kinematics and EMG activity. We used a two-tailed, paired student t-test to look for differences in the magnitude of the exoskeleton dorsiflexor torque and total absolute exoskeleton work between subjects initial exposure to the powered exoskeleton, Day 1, Resistance Minute 1 (Initial Resistance) and subjects final minute of powered walking, Day 2, Resistance Minute 30 (Final Resistance). As the exoskeleton was not powered during Baseline, comparisons of the exoskeleton kinetics were only compared between Initial and Final Resistance. We used one-way repeated measures ANOVAs to compare peak ankle plantar flexion, knee extension and hip extension angles and peak EMG amplitudes between Baseline, Initial Resistance and Final Resistance time points. For all testing we set the significance level at p<0.05 and used Tukey Honestly Significant Difference (THSD) post hoc tests to make individual comparisons when necessary. Baseline data was taken from the final, 10 th, minute of Baseline walking on Day 1 as opposed to Day 2. Paired student t-tests confirmed that there was no difference in either kinematic or EMG data between days (p<0.05) for any of the Baseline variables examined. Finally, we calculated cross- 14
15 correlations on raw unrectified EMG during every step cycle recorded during Baseline between soleus - medial gastrocnemius and soleus - lateral gastrocnmemius to ensure that the soleus EMG signals used for controlling the exoskeleton were free from crosstalk (Wakeling 2009). We also performed crosscorrelations relating the change in peak EMG values from Baseline to Final Resistance for soleus - medial gastrocnemius and soleus - lateral gastrocnemius to assess the relationship in the direction that subjects modulated the recruitment of these two muscles. Results As designed, when powered, the exoskeleton produced a dorsiflexor torque about the ankle joint. During Initial Resistance, the exoskeleton produced a peak stance-phase dorsiflexor torque normalized to subjects bodyweight of 0.45 ± 0.17 Nm/kg. (Figure 2b) The magnitude of this dorsiflexor torque was ~ 32% of the peak stance-phase plantar flexor torque (1.42 ± 0.16 Nm/kg) subjects produced during over ground walking with no exoskeleton (Figure 2A). At Final Resistance, the magnitude of the peak exoskeleton dorsiflexor torque had been significantly reduced, 0.16 ± 0.11 Nm/kg (T-test: p = ) (Figure 2B). Accompanying these reductions in dorsiflexor torque the subjects also reduced both positive and negative power produced by the exoskeleton (Figure 2B). The total absolute work, calculated from the exoskeleton power profiles, produced during Initial Resistance was J/kg. At Final Resistance the total absolute work produced had been significantly reduced (T-test: p = ) by ~ 73% to J/kg. 15
16 During Baseline walking subjects displayed typical sagittal plane joint angle kinematic patterns with two periods of peak plantar flexion occurring during early stance phase and again during the period of pre-swing thru initial-swing, and peak knee and hip extension occurring during late stance (Figure 3). Subjects initial kinematic response to the robotic imposed resistance to soleus activation was both substantial and uniform. Subjects visually presented a limp on the resisted limb that remained through Final Resistance (Figure 3). At the ankle joint, subjects significantly reduced their peak plantar flexion angle occurring during pre-swing thru initial-swing (ANOVA: P < ) when comparing Baseline to both Initial Resistance and Final Resistance periods (THSD, P < 0.05) (Figure 4). At the knee joint there were significant differences in the maximum knee extension angle subjects achieved (ANOVA: P = ) across the testing period. Post hoc tests revealed that during Initial Resistance subjects significantly increased knee flexion compared to Baseline (THSD, P < 0.05) (Figure 4). During Final Resistance there were no significant differences in peak knee extension when compared to Baseline (THSD, P > 0.05). Statistical testing found difference in peak hip extension (ANOVA: P = ). However, effects test found differences only between subjects (p < ) and not between time periods (p = ) (Figure 4). Results from the cross-correlations performed on raw EMG signals during Baseline found minimal correlation between soleus and medial gastrocnemuis, R 2 = (mean + standard deviation), with the maximum value for all subjects being R 2 = Cross-correlations between soleus and lateral 16
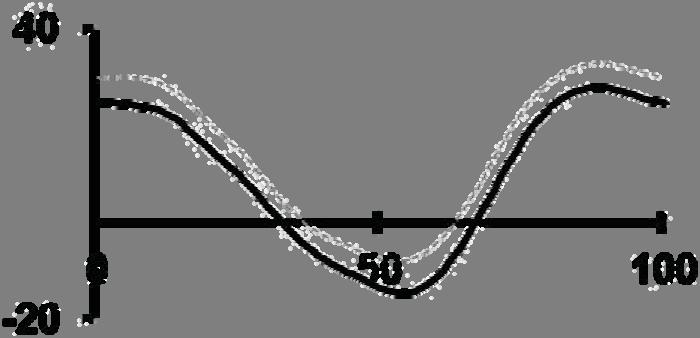
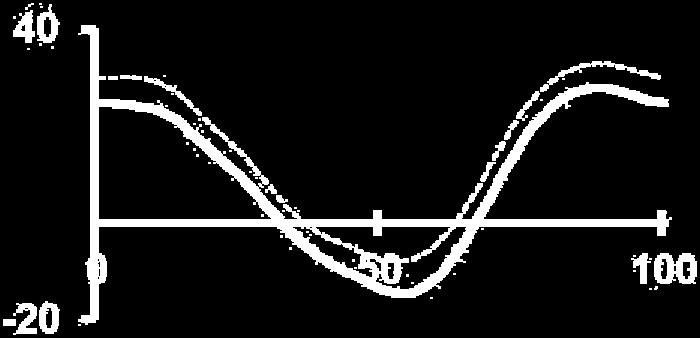
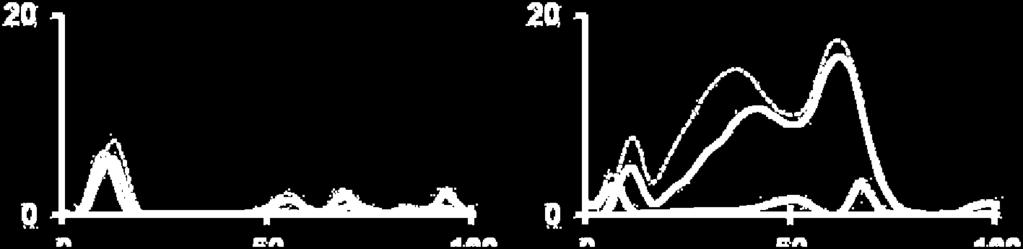
17 gastrocnemius similarly found minimal correlation, R 2 = , with the maximum value for all subjects being R 2 = These results suggest that there was minimal common signal recorded from the distinct muscles and that different populations of motor units were recorded (Wakeling 2009). During Baseline walking subjects displayed typical EMG patterns in the lower limb with soleus, medial gastrocnemius and lateral gastrocnemius all demonstrating primary activation during late stance and the tibialis anterior being active primarily during early stance and late swing (Figure 5). ANOVAs examing peak EMG amplitude found significant differences in lower limb muscle activity across the training period for both the soleus and lateral gastrocnemius (Table 1). The soleus significantly increased peak EMG values during Initial Resistance when compared to Baseline (THSD, P < 0.05). At Final Resistance the soleus had significantly decreased peak EMG values (THSD, P < 0.05) when compared to Baseline. There were significant differences in peak lateral gastrocnemius values between Initial Resistance and Final Resistance (THSD, P < 0.05) however, neither of these values was different from Baseline (THSD, P > 0.05). For the upper leg subjects also displayed typical EMG patterns during Baseline walking with the rectus femoris, vastus medialis and vastus lateralis all displaying primary bursts of activity during early stance phase. Rectus femoris also had a second burst of activity occurring during early swing. The medial hamstrings were active during Baseline primarily during late swing and early stance (Figure 6). ANOVAs examining the peak EMG amplitude of the upper leg 17
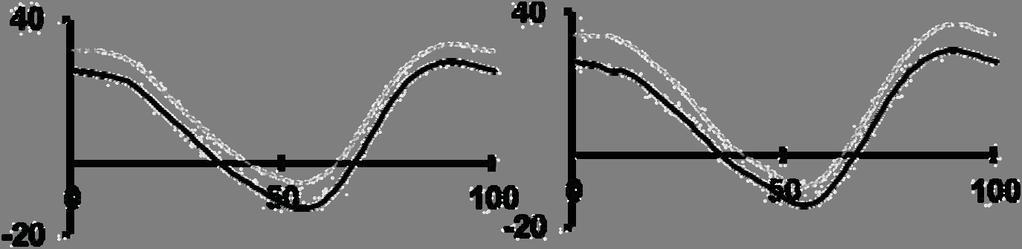
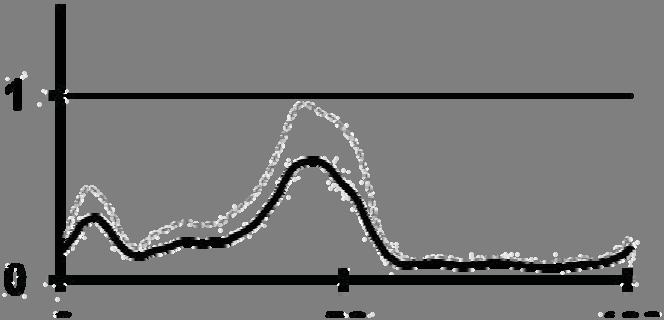
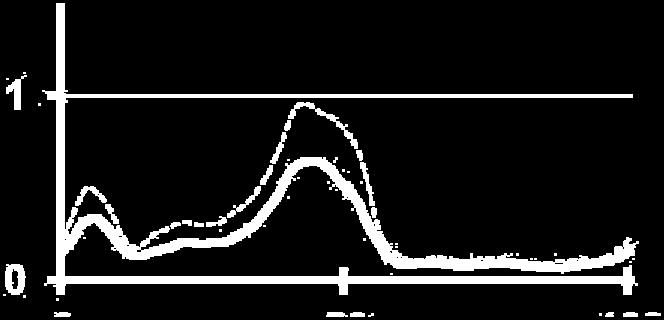
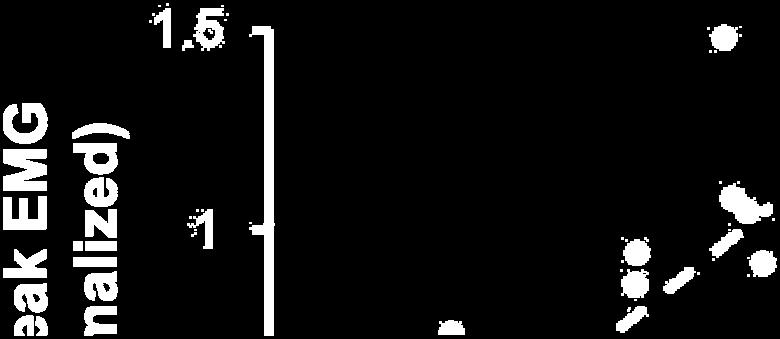
18 muscles across time found no significant differences in any of the muscles examined (Table 1). A closer examination of individual muscle activation patterns over the 60 minutes of resisted walking found between subjects variations in how the subjects modulated soleus and gastrocnemius recruitment. At the two extremes, some subjects adapted to the antagonistic robotic perturbation by minimizing all plantar flexor muscle activity (Figure 7A), while other subjects selected to maintain their baseline muscle activation patterns (Figure 7b). As observed in the individual data (Figure 7 A & B) there was a trend for subjects to modulate both soleus and the gastrocnemius muscles in a similar direction during the testing period, meaning that if subjects decreased soleus activation they likely decreased gastrocnemius activity as well. Figure 8 shows linear regressions of the magnitude of change from Baseline to Final Resistance in the peak EMG values for the soleus and medial / lateral gastrocnemius. The changes in soleus medial gastrocnemius and soleus lateral gastrocnemius magnitude had a correlation coefficients of r = 0.64 and r = 0.63 respectively. This relationship indicates that the muscles were being modulated in the same direction Discussion In response to perturbations, people adapt their motor control strategies to achieve purposeful locomotion. In the current study, subjects were challenged with a very difficult task; to walk while wearing a powered exoskeleton that directly counteracted the mechanical action of their soleus. In response to this 18
19 perturbation subjects adapted their locomotor control patterns by making significant reductions in soleus recruitment. Although kinematic patterns also changed significantly in response to the exoskeleton resistance, subjects were able to maintain forward progression at the target speed. Also, over the course of the training period, subjects were able to significantly reduce the antagonistic effects of the exoskeleton. The results from this study provide insight into how the central nervous system regulates control of the major plantar flexor muscle groups during human walking. The powered exoskeleton in this experiment was intended to create a substantial perturbation to the user s ability to control locomotion by producing a resistive torque offsetting the mechanical action of the soleus. Because the resistive dorsiflexor torque created by the exoskeleton was considerable and was tied directly to the user s soleus recruitment, this setup resulted in a substantial reduction in the metabolic efficiency (mechanical power output / metabolic power) of the soleus muscle. Given the strong evidence that humans will select gait patterns that minimize metabolic costs (Alexander 2002; Bertram and Ruina 2001; Cavagna and Franzetti 1986; Donelan et al. 2001; 2002; Minetti et al. 2003), we hypothesized that individuals would significantly reduce soleus recruitment. Within this experimental setup, maintaining normal soleus activation profiles would be both metabolically costly and mechanically ineffective. As predicted, by the Final Resistance period subjects made significant reductions in peak soleus activation. It is worth noting that while the average reduction in peak soleus activation was ~29%, the amount of reduction was distributed over a wide 19
20 range from no change up to a 65% reduction. There was no clear indication from the data we collected to explain why we saw this spread. We speculated that some subjects were more willing to explore alternative walking strategies than others, but further examinations of stride-to-stride EMG and joint kinematic variability provided no support for this theory. Decreasing soleus amplitude directly reduced the antagonistic effects (dorsiflexor torque and total absolute work) produced by the exoskeleton during walking. However, the reduction in soleus recruitment also resulted in a significant reduction in the peak ankle plantar flexion angle during late stance. It has been proposed that a strong, well timed ankle push-off occurring just prior to initial contact of the contralateral limb, can significantly reduce the energy required for step-to-step transition costs (Kuo and Donelan 2010). Loss of this push-off can be compensated for by performing work at other joints, but doing so may be up to 4 times more energetically costly (Kuo 2002). Thus, by choosing to decrease the recruitment of their soleus, which reduced the metabolic cost associated with producing force in that muscle, subjects accepted a locomotor strategy that was likely less metabolically efficient than normal walking because they would have to compensate for the loss of ankle push-off by performing more work at other joints. This strategy was implemented over the course of the training period as subjects initial response to the antagonistic exoskeleton was to increase soleus recruitment and attempt presumably (although unsuccessfully), to maintain normal ankle joint moments as has been indicated in previous studies (Kao et al. 2010a). These results suggest that the human locomotor control 20
21 system may tune both individual muscle activation profiles and gross locomotor patterns (joint torque and kinematics) to minimize metabolic energy costs. The soleus is a primary contributor to forward trunk propulsion and body weight support during gait (McGowan et al. 2009; McGowan et al. 2008; Neptune et al. 2001). To maintain locomotor function, individuals in the current study had to compensate for the reduced biomechanical contributions of the soleus. As such, we hypothesized that subjects would increase gastrocnemius recruitment based on a computer modeling study suggesting that isolated decreases in soleus strength could be offset primarily by increases in gastrocnemius work combined with secondary increases in work performed by the vasti, rectus femoris and gluteus maximus (Goldberg and Neptune 2007). Subjects did not increase gastrocnemius activity in response to the soleus-controlled antagonistic exoskeleton. In fact, there was a moderate trend for subjects to decrease both gastrocnemius and soleus. Gait analysis of individuals with stroke has found that reduced forward propulsion created by deficits of soleus and other muscles on the paretic limb is compensated for by the non-paretic limb (Hall et al. 2011). As we did not observe significant changes in any muscle other than the soleus on the resisted limb, it is quite possible that subjects also compensated for the mechanically reduced soleus output by making locomotor changes to the contralateral limb. Future research examining the contributions of the contralateral limb may be helpful for understanding how individuals may compensate for the exoskeleton perturbations. 21
22 There are two primary explanations why individuals would not increase gastrocnemius activity to offset decreases in soleus mechanical output. First, it is possible that the two plantar flexor muscles perform a diverse set of biomechanical functions during gait meaning that the gastrocnemius may not be able to directly compensate for soleus impairments. The gastrocnemius has been suggested to contribute to body weight support and the initiation of leg swing (McGowan et al. 2009; McGowan et al. 2008; Neptune et al. 2001) which do not overlap the role of the soleus as the primary contributor to forward propulsion. In addition, simulations have suggested that modifying soleus output is the primary mechanism by which the mechanical output of the leg is regulated in response to changes in demand for body weight support and forward propulsion (McGowan et al. 2009). Thus, the gastrocnemius may not be able to replace the biomechanical actions of the soleus during gait. Recent simulations finding a limited ability of the leg to compensate for individual muscle loss lend further support to this perspective (Kutch and Valero-Cuevas 2011). Second, the nervous system may simplify the complex task of controlling walking by forming combinations of activation patterns that cross multiple muscles known as synergies (Lacquaniti et al. 2012; Ting and McKay 2007; Tresch and Jarc 2009). It has been shown that the EMG of the leg and trunk during human walking can be represented by the linear combination of four or five of these basic activation patterns (Clark et al. 2010; Ivanenko et al. 2004). The soleus and gastrocnemius have been identified as belonging to the same muscle synergy during human walking (Clark et al. 2010; Lacquaniti et al. 2012; 22
23 McGowan et al. 2010). If the activation of the soleus and gastrocnemius are indeed controlled as a unit, the nervous system may not have the flexibility to both reduce the drive to the soleus while at the same time increasing activation of the gastrocnemius. Our observation that there was a trend to reduce the activation of both the soleus and gastrocnemius, even though only the soleus was perturbed, supports the idea that the nervous system controls groups of muscles rather than individual muscles. McGowan et al. found that flexible weighting of gastrocnemius and soleus activity were required to respond to substantial changes in imposed mechanical demands during walking (McGowan et al. 2010). The flexible plantar flexor module they propose allowing the relative activations of muscles within the module to change, could account for the data we observed. One of the challenges subjects may have had in proficiently adapting to the exoskeleton resistance was that the sensory feedback received by the subjects in response to activation of the soleus was likely inconsistent with their forward model. The forward model predicts the sensory feedback that will be received based on the state of the limb and the current motor command (Wolpert et al. 1995). Typically during walking, activation of the soleus will result in an angular acceleration of the ankle joint into plantar flexion. In predictable environments, the movement related parameters created by activation of the soleus will result in corresponding sensory feedback that when compared to the individuals forward model allow the central nervous system to rapidly detect movement errors and to appropriately respond to these errors using an established inverse model. During 23
24 human walking external perturbations that increase or decrease the anticipated load on the triceps surae muscles result in rapid within step modifications to EMG amplitude (Gordon et al. 2009; Gordon et al. 2010; Sinkjaer et al. 2000). In the current experiment, when the soleus was activated the resulting angular acceleration of the ankle joint was less than the individual would predict during normal gait. One might theorize that the initial response to this feedback would be to increase activation of the soleus to correct the perceived underperformance. In the current study, we observed exactly this, subjects made an initial significant increase in soleus activation when walking with the antagonistic exoskeleton. However, the problem with this response is that it is based on an incorrect internal model (composed of both incorrect forward and inverse models). Increasing soleus activation in this situation does not reduce the subject s movement errors. Franklin et al. has proposed a simple learning algorithm suggesting that in response to unpredictable environments individuals will create a general initial co-contraction about their joint. The drive to both agonist and antagonist groups will then be gradually decreased over multiple iterations of a movement provided movement error remains small without the requirement that the nervous system has first developed an appropriate inverse dynamic model (Franklin et al. 2008). We have applied this model to explain the locomotor adaptations observed when individuals walk with an exoskeleton configured to increase soleus mechanical output (Reinkensmeyer et al. 2009). This model could also be used to explain the generalized locomotor adaptation 24
25 response (initial increases in muscle activation that decay overtime with practice) observed in the current experiment Conclusion Performing tractable studies on human locomotor motor adaptation in response to internal perturbations that disrupt one s neuromuscular mapping is challenging. Myoelectrically controlled, powered exoskeletons have the potential to serve as a tool to investigate this motor adaptation process. In the current study, subjects significantly reduced soleus recruitment in response to a powered exoskeleton that counteracted the mechanical output of the muscle. The reduction of soleus activation likely decreased the metabolic energy cost of walking with the antagonistic exoskeleton but resulted in significant kinematic changes. The results from this study demonstrate the ability of the nervous system to recalibrate locomotor output in response to substantial changes in the mechanical output of the soleus muscle and associated sensory feedback. This study provides further evidence that the human locomotor system of intact individuals is highly flexible and able to adapt to achieve effective although kinematically altered locomotion in response significant perturbations of the neuromuscular map Acknowledgements The authors would like to thank Ammanath Peethambaran, C.O., and the staff of the University of Michigan Orthotics and Prosthetics Center for help with 25
26 designing and fabricating parts of the exoskeleton. We also thank members of the Human Neuromechanics Laboratory for assistance in collecting and analyzing data. This project was funded by NIH R01NS References Alexander RM. Energetics and optimization of human walking and running: The 2000 Raymond Pearl Memorial Lecture. Am J Hum Biol 14: , Arsenault AB, Winter DA, and Marteniuk RG. Is there a 'normal' profile of EMG activity in gait? Med Biol Eng Comput 24: , Bertram JE, and Ruina A. Multiple walking speed-frequency relations are predicted by constrained optimization. J Theor Biol 209: , Cain SM, Gordon KE, and Ferris DP. Locomotor adaptation to a powered ankle-foot orthosis depends on control method. J Neuroeng Rehabil 4: 48, Cavagna GA, and Franzetti P. The determinants of the step frequency in walking in humans. J Physiol (Lond) 373: , Chou CP, and Hannaford B. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Trans Robot Automat 12: , Clark DJ, Ting LH, Zajac FE, Neptune RR, and Kautz SA. Merging of healthy motor modules predicts reduced locomotor performance and muscle coordination complexity post-stroke. J Neurophysiol 103: , Close JR, and Todd FN. The phasic activity of the muscles of the lower extremity and the effect of tendon transfer. J Bone Jt Surg 41: , Courtine G, Papaxanthis C, and Schieppati M. Coordinated modulation of locomotor muscle synergies constructs straight-ahead and curvilinear walking in humans. Exp Brain Res 170: , de Rugy A, Loeb GE, and Carroll TJ. Muscle coordination is habitual rather than optimal. J Neurosci 32: , Donelan JM, Kram R, and Kuo AD. Mechanical and metabolic determinants of the preferred step width in human walking. Proc R Soc Lond Ser B-Biol Sci 268: , Donelan JM, Kram R, and Kuo AD. Mechanical work for step-to-step transitions is a major determinant of the metabolic cost of human walking. J Exp Biol 205: ,
27 Ferris DP, Czerniecki JM, and Hannaford B. An ankle-foot orthosis powered by artificial pneumatic muscles. J Appl Biomech 21: , Ferris DP, Gordon KE, Sawicki GS, and Peethambaran A. An improved powered ankle-foot orthosis using proportional myoelectric control. Gait Posture 23: , Forssberg H, and Svartengren G. Hardwired locomotor network in cat revealed by a retained motor pattern to gastrocnemius after muscle transposition. Neurosci Lett 41: , Franklin DW, Burdet E, Tee KP, Osu R, Chew CM, Milner TE, and Kawato M. CNS learns stable, accurate, and efficient movements using a simple algorithm. J Neurosci 28: , Goldberg EJ, and Neptune RR. Compensatory strategies during normal walking in response to muscle weakness and increased hip joint stiffness. Gait Posture 25: , Gordon KE, and Ferris DP. Learning to walk with a robotic ankle exoskeleton. J Biomech 40: , Gordon KE, Sawicki GS, and Ferris DP. Mechanical performance of artificial pneumatic muscles to power an ankle-foot orthosis. J Biomech 39: , Gordon KE, Wu M, Kahn JH, Dhaher YY, and Schmit BD. Ankle Load Modulates Hip Kinetics and EMG during Human Locomotion. J Neurophysiol 101: , Gordon KE, Wu M, Kahn JH, and Schmit BD. Feedback and feedforward locomotor adaptations to ankle-foot load in people with incomplete spinal cord injury. J Neurophysiol 104: , Gottschall JS, and Kram R. Energy cost and muscular activity required for propulsion during walking. J Appl Physiol 94: , Hall AL, Peterson CL, Kautz SA, and Neptune RR. Relationships between muscle contributions to walking subtasks and functional walking status in persons with post-stroke hemiparesis. Clin Biomech (Bristol, Avon) 26: , Ivanenko YP, Poppele RE, and Lacquaniti F. Five basic muscle activation patterns account for muscle activity during human locomotion. J Physiol (Lond) 556: , Kao PC, Lewis CL, and Ferris DP. Invariant ankle moment patterns when walking with and without a robotic ankle exoskeleton. J Biomech 43: , 2010a. Kao PC, Lewis CL, and Ferris DP. Joint kinetic response during unexpectedly reduced plantar flexor torque provided by a robotic ankle exoskeleton during walking. J Biomech 43: , 2010b. Kinnaird CR, and Ferris DP. Medial gastrocnemius myoelectric control of a robotic ankle exoskeleton. IEEE Trans Neural Syst Rehabil Eng 17: 31-37, Krakauer JW, and Shadmehr R. Consolidation of motor memory. Trends Neurosci 29: 58-64, Kuo AD. Energetics of actively powered locomotion using the simplest walking model. J Biomech Eng 124: ,
28 Kuo AD, and Donelan JM. Dynamic principles of gait and their clinical implications. Phys Ther 90: , Kutch JJ, and Valero-Cuevas FJ. Muscle redundancy does not imply robustness to muscle dysfunction. J Biomech 44: , Lacquaniti F, Ivanenko YP, and Zago M. Patterned control of human locomotion. J Physiol 590: , Lee SJ, and Hidler J. Biomechanics of overground vs. treadmill walking in healthy individuals. J Appl Physiol 104: , McGowan CP, Kram R, and Neptune RR. Modulation of leg muscle function in response to altered demand for body support and forward propulsion during walking. J Biomech 42: , McGowan CP, Neptune RR, Clark DJ, and Kautz SA. Modular control of human walking: Adaptations to altered mechanical demands. J Biomech 43: , McGowan CP, Neptune RR, and Kram R. Independent effects of weight and mass on plantar flexor activity during walking: implications for their contributions to body support and forward propulsion. J Appl Physiol 105: , Minetti AE, Boldrini L, Brusamolin L, Zamparo P, and McKee T. A feedbackcontrolled treadmill (treadmill-on-demand) and the spontaneous speed of walking and running in humans. J Appl Physiol 95: , Neptune RR, Kautz SA, and Zajac FE. Contributions of the individual ankle plantar flexors to support, forward progression and swing initiation during walking. J Biomech 34: , Nessler JA, Huynh H, and McDougal M. A single bout of resistance exercise does not affect nonlinear dynamics of lower extremity kinematics during treadmill walking. Gait Posture 34: , Perry J. Gait Analysis of Normal and Pathological Function. Thorofare, NJ: Slack Incorporated, Perry J, and Hoffer MM. Preoperative and postoperative dynamic electromyography as an aid in planning tendon transfers in children with cerebral palsy. J Bone Jt Surg [Am] 59: , Ralston HJ. Energy-speed relation and optimal speed during level walking. Int Z Angew Physiol 17: , Reinkensmeyer DJ, Akoner O, Ferris DP, and Gordon KE. Slacking by the human motor system: Computational models and implications for robotic orthoses. Conf Proc IEEE Eng Med Biol Soc 1: , Sinkjaer T, Andersen JB, Ladouceur M, Christensen LO, and Nielsen JB. Major role for sensory feedback in soleus EMG activity in the stance phase of walking in man. J Physiol 523: , Sperry RW. The problem of central nervous reorganization after nerve regeneration and muscle transposition. Quart Rev Biol 20: , Sutherland DH, Bost FC, and Schottstaedt ER. Electromyographic study of transplanted muscles about the knee in poliomyelitic patients. J Bone Jt Surg 42: , Ting LH, and McKay JL. Neuromechanics of muscle synergies for posture and movement. Curr Opin Neurobiol 17: ,
29 Tresch MC, and Jarc A. The case for and against muscle synergies. Curr Opin Neurobiol 19: , Wakeling JM. The recruitment of different compartments within a muscle depends on the mechanics of the movement. Biol Lett 5: 30-34, Waters RL, Frazier J, Garland DE, Jordan C, and Perry J. Electromyographic gait analysis before and after operative treatment for hemiplegic equinus and equinovarus deformity. J Bone Jt Surg [Am] 64: , Wolpert DM, Ghahramani Z, and Jordan MI. An internal model for sensorimotor integration. Science 269: , Zatsiorsky VM. Kinetics of Human Motion. Champaign, IL: Human Kinetics, Figure Legends Figure 1. Electrodes placed on the skin of the subject s leg recorded electromyographic signals (EMG) from the soleus muscle, a plantar flexor. A computer processed the soleus EMG to control air pressure sent to an artificial pneumatic muscle so that there was a proportional relationship between EMG amplitude and air pressure. As air pressure increased, it caused the artificial muscle to develop tension by shortening in length. The exoskeleton effectively created a co-contraction about the ankle joint proportional to soleus muscle activation. White arrows about the ankle joint show the direction of torque created by the exoskeleton and user s soleus muscle. Thus, when the soleus muscle was activated the exoskeleton produced a dorsiflexor torque limiting the soleus ability to produce plantar flexor torque. Figure 2. A) Mean and standard deviation of step cycle torque profiles calculated from all 10 subjects. Data for Net Ankle Over ground is the net ankle torque subjects created during over ground walking without the exoskeleton. B) Data for the two powered exoskeleton (EXO) conditions including the dorsiflexion 29
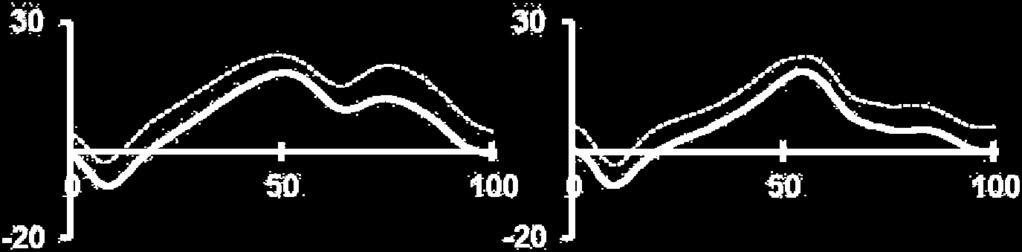
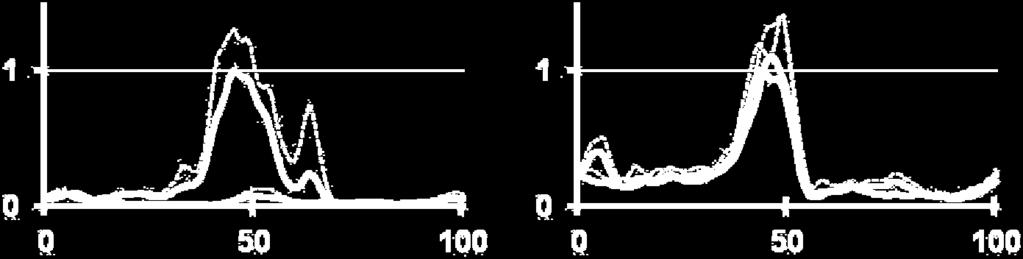
30 torque and power produced solely by the exoskeleton during treadmill walking. The exoskeleton is only able to actively produce dorsiflexion torques. When the power created by the exoskeleton is positive it indicates the exoskeleton is generating energy occurring during periods when the artificial pneumatic muscle is both shortening (during ankle joint dorsiflexion) and producing torque. Negative values indicate the exoskeleton is absorbing energy, which occur when the artificial pneumatic muscle is both lengthening (during ankle joint plantar flexion) and producing torque. Vertical dashed lines indicate stance to swing transitions. Figure 3. Mean and standard deviation of step cycle kinematic profiles for the ankle, knee and hip joint angles calculated from all 10 subjects during Baseline, Initial Resistance and Final Resistance time periods. Vertical dashed lines indicate stance to swing transitions. Figure 4. Mean and standard deviation of maximum ankle plantar flexion, maximum knee extension and maximum hip extension occurring at specific phases of the gait cycle during the Baseline, Initial Resistance and Final Resistance time periods. Data were calculated from all 10 subjects. * Indicates that a value is significantly different from Baseline. Figure 5. Mean and standard deviation of step cycle EMG profiles calculated from all 10 subjects for the soleus (SOL), medial gastrocnemius (MG), lateral gastrocnemius (LG) and tibialis anterior (TA) during the Baseline, Initial Resistance and Final Resistance time periods. EMG values were normalized to the peak value occurring during Baseline. Vertical dashed lines indicate stance to swing transitions. 30
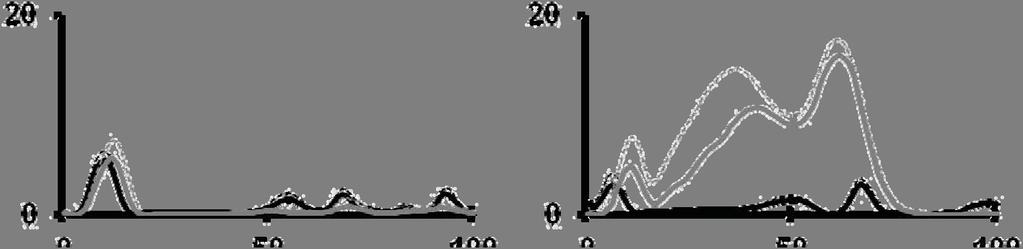
31 Figure 6. Mean and standard deviation of step cycle EMG profiles calculated from all 10 subjects for the rectus femoris (RF), vastus medialis (VM), vastus lateralis (VL), and medial hamstring (MH) during the Baseline, Initial Resistance and Final Resistance time periods. EMG values were normalized to the peak value occuring during Baseline. Vertical dashed lines indicate stance to swing transitions. Figure 7. Mean and standard deviation of step cycle profiles from individual subjects showing data of the soleus (SOL), medial gastrocnemius (MG), lateral gastrocnemius (LG), ankle angle and exoskeleton dorsiflexor torque at the Baseline and Final Resistance time periods. A) Subject #1 selected to minimize plantar flexor activity in response to the exoskeleton resistance and B) Subject #4 selected to maintain muscle activity at levels similar to Baseline in response to the exoskeleton resistance. Vertical dashed lines indicate stance to swing transitions. Figure 8. Linear regressions showing the relationship between the changes in peak EMG values calculated from soleus-medial gastrocnemius and soleus-lateral gastrocnemius during the Final Resistive time period. RMS EMG values have been normalized to Baseline. Table 1. Mean and standard deviation of peak EMG values normalized to Baseline. Shaded values indicate that post hoc testing found that the values are significantly different from Baseline. Note ANOVA s compare non-normalized EMG values between all three time points (Baseline, Initial Resistance and Final Resistance). 31




32 Figure 1. Air Compressor Control Signal Soleus Computer Interface Exoskeleton Soleus EMG
 Torque ( Nm/kg)")
")
 % Gait Cycle Exo.")


 oskeleton")
33 Figure 2. A.) Torque ( Nm/kg) Net Ankle Overground (+) dorsiflexion B.) % Gait Cycle Exo. Only Initial Resistance Exo. Only Final Resistance Ex Exos skeleton Ankl e Power (W) oskeleton Torque (Nm/kg) % Gait Cycle % Gait Cycle Mean SD

")
")
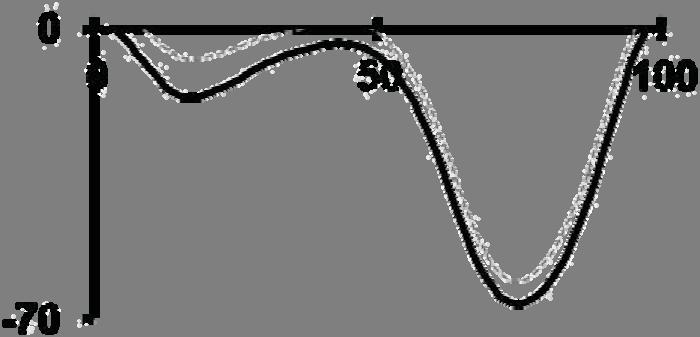
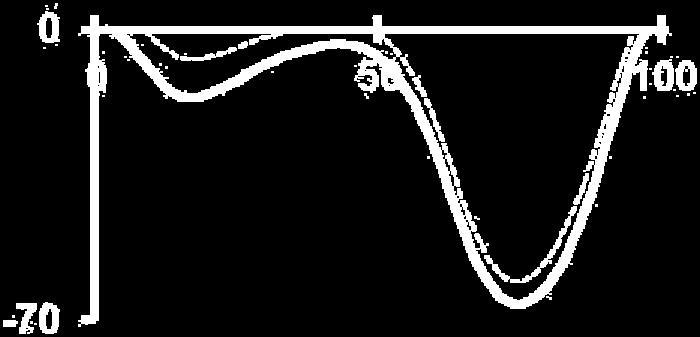
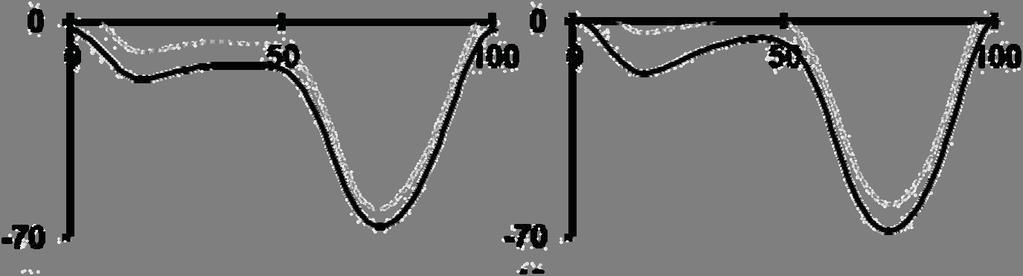
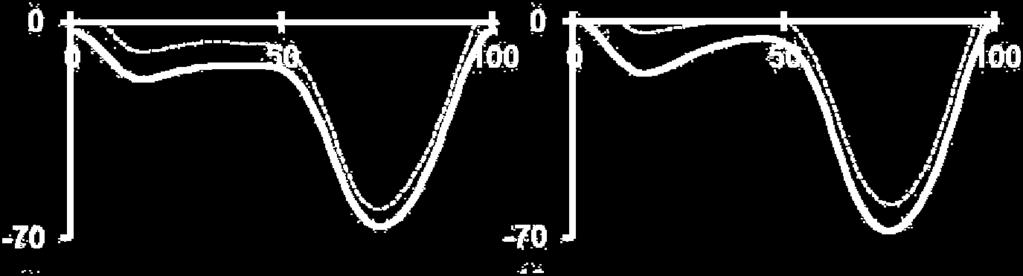
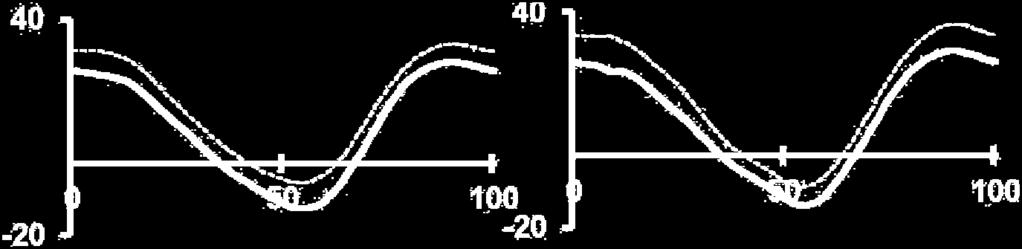
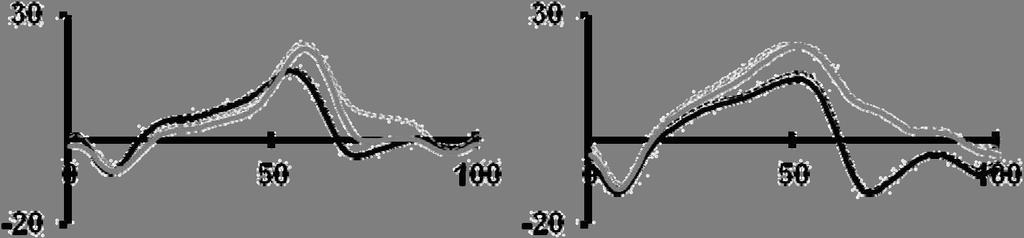
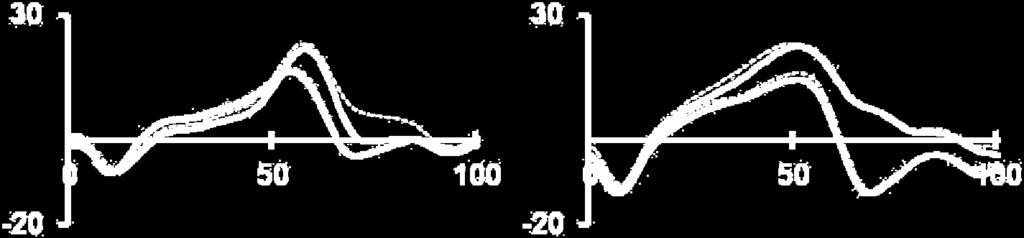
34 Figure3. Ankle Angle (Degrees) Baseline (+) dorsiflexion Initial Resistance Final Resistance Knee Angle (Degrees) (-) flexion Hip Angle (Degrees) (+) flexion %GaitCycle %GaitCycle %GaitCycle Mean SD

 Pe")
 dorsi")





35 Figure 4. ak Ankle Plantar Flexion Angle (Degrees) Pe 50-75% Gait Cycle (+) dorsi * * 12-62% Gait Cycle Peak Knee Extensi ion Angle (Deg grees) (-) flex * 12-62% Gait Cycle gle ) Peak Hip Extension An (Degrees) (+) flex Baseline Initial Final Resist. Resist.

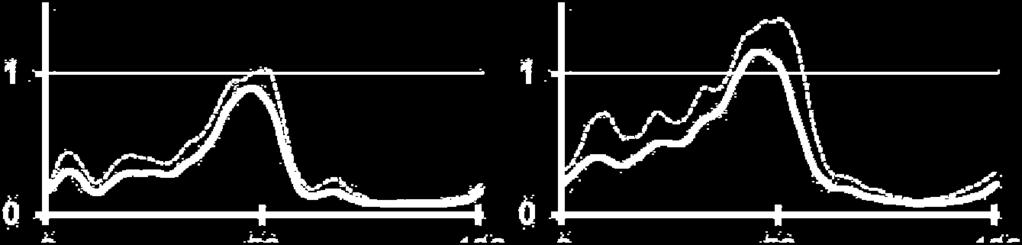






36 Figure 5. Baseline Initial Resistance Final Resistance TA (Norm.) LG (Norm.) MG (Norm.) SOL (Norm.) % Gait Cycle % Gait Cycle % Gait Cycle Mean SD








37 Figure 6. Baseline Initial Resistance Final Resistance MH (Norm.) VL (Norm.) VM (Norm.) RF (Norm.) % Gait Cycle % Gait Cycle % Gait Cycle Mean SD
 B.")



")
38 Figure 7. A.) B.) Subject 1 Subject 4 Exo. Torque (Nm) Ankle Angle (Degrees) LG EMG (Normalized) MG EMG (Normalized) SOL EMG (Normalized) % Gait Cycle % Gait Cycle Baseline mean SD FINAL resistance SD







39 Figure 8. FINAL Resistive R 2 = 0.41 R 2 = 0.39 Soleus Peak EMG (Normalized) Soleus Peak EMG (Normalized)
Mechanics and energetics of level walking with powered ankle exoskeletons
 142 The Journal of Experimental Biology 211, 142-1413 Published by The Company of Biologists 28 doi:1.1242/jeb.9241 Mechanics and energetics of level walking with ed ankle exoskeletons Gregory S. Sawicki
142 The Journal of Experimental Biology 211, 142-1413 Published by The Company of Biologists 28 doi:1.1242/jeb.9241 Mechanics and energetics of level walking with ed ankle exoskeletons Gregory S. Sawicki
Gait & Posture 33 (2011) Contents lists available at ScienceDirect. Gait & Posture. journal homepage:
 Contents lists available at ScienceDirect. Gait & Posture. journal homepage:") Gait & Posture 33 (2011) 562 567 Contents lists available at ScienceDirect Gait & Posture journal homepage: www.elsevier.com/locate/gaitpost Braking and propulsive impulses increase with speed during accelerated
Gait & Posture 33 (2011) 562 567 Contents lists available at ScienceDirect Gait & Posture journal homepage: www.elsevier.com/locate/gaitpost Braking and propulsive impulses increase with speed during accelerated
Transformation of nonfunctional spinal circuits into functional states after the loss of brain input
 Transformation of nonfunctional spinal circuits into functional states after the loss of brain input G. Courtine, Y. P. Gerasimenko, R. van den Brand, A. Yew, P. Musienko, H. Zhong, B. Song, Y. Ao, R.
Transformation of nonfunctional spinal circuits into functional states after the loss of brain input G. Courtine, Y. P. Gerasimenko, R. van den Brand, A. Yew, P. Musienko, H. Zhong, B. Song, Y. Ao, R.
Adaptation to Knee Flexion Torque Assistance in Double Support Phase
 Adaptation to Knee Flexion Torque Assistance in Double Support Phase James S. Sulzer, Keith E. Gordon, T. George Hornby, Michael A. Peshkin and James L. Patton Abstract Studies have shown locomotor adaptation
Adaptation to Knee Flexion Torque Assistance in Double Support Phase James S. Sulzer, Keith E. Gordon, T. George Hornby, Michael A. Peshkin and James L. Patton Abstract Studies have shown locomotor adaptation
Neurorehabil Neural Repair Oct 23. [Epub ahead of print]
![Neurorehabil Neural Repair Oct 23. [Epub ahead of print]](/thumbs/86/94477916.jpg "Neurorehabil Neural Repair Oct 23. [Epub ahead of print]") APPENDICE Neurorehabil Neural Repair. 2009 Oct 23. [Epub ahead of print] Segmental Muscle Vibration Improves Walking in Chronic Stroke Patients With Foot Drop: A Randomized Controlled Trial. Paoloni M,
APPENDICE Neurorehabil Neural Repair. 2009 Oct 23. [Epub ahead of print] Segmental Muscle Vibration Improves Walking in Chronic Stroke Patients With Foot Drop: A Randomized Controlled Trial. Paoloni M,
Supplementary Figure S1
 Supplementary Figure S1: Anterior and posterior views of the marker set used in the running gait trials. Forty-six markers were attached to the subject (15 markers on each leg, 4 markers on each arm, and
Supplementary Figure S1: Anterior and posterior views of the marker set used in the running gait trials. Forty-six markers were attached to the subject (15 markers on each leg, 4 markers on each arm, and
C. P. McGowan, 1 R. R. Neptune, 1 and R. Kram 2 1
 J Appl Physiol 105: 486 494, 2008. First published June 12, 2008; doi:10.1152/japplphysiol.90448.2008. Independent effects of weight and mass on plantar flexor activity during walking: implications for
J Appl Physiol 105: 486 494, 2008. First published June 12, 2008; doi:10.1152/japplphysiol.90448.2008. Independent effects of weight and mass on plantar flexor activity during walking: implications for
Does Ski Width Influence Muscle Action in an Elite Skier? A Case Study. Montana State University Movement Science Laboratory Bozeman, MT 59717
 Does Ski Width Influence Muscle Action in an Elite Skier? A Case Study John G. Seifert 1, Heidi Nunnikhoven 1, Cory Snyder 1, Ronald Kipp 2 1 Montana State University Movement Science Laboratory Bozeman,
Does Ski Width Influence Muscle Action in an Elite Skier? A Case Study John G. Seifert 1, Heidi Nunnikhoven 1, Cory Snyder 1, Ronald Kipp 2 1 Montana State University Movement Science Laboratory Bozeman,
INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING
 INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING Joseph P. Hunter 1, Robert N. Marshall 1,, and Peter J. McNair 3 1 Department of Sport and Exercise Science, The University of Auckland, Auckland,
INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING Joseph P. Hunter 1, Robert N. Marshall 1,, and Peter J. McNair 3 1 Department of Sport and Exercise Science, The University of Auckland, Auckland,
25 Lower-Limb Muscle Function in Human Running
 25 Lower-Limb Muscle Function in Human Running Anthony G. Schache, Tim W. Dorn, and Marcus G. Pandy * Abstract. This paper provides a brief summary of work completed to date in our research laboratory
25 Lower-Limb Muscle Function in Human Running Anthony G. Schache, Tim W. Dorn, and Marcus G. Pandy * Abstract. This paper provides a brief summary of work completed to date in our research laboratory
The overarching aim of the work presented in this thesis was to assess and
 CHAPTER 7 EPILOGUE Chapter 7 The overarching aim of the work presented in this thesis was to assess and understand the effort for balance control in terms of the metabolic cost of walking in able-bodied
CHAPTER 7 EPILOGUE Chapter 7 The overarching aim of the work presented in this thesis was to assess and understand the effort for balance control in terms of the metabolic cost of walking in able-bodied
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
ARTICLE IN PRESS. Journal of Biomechanics
 Journal of Biomechanics 42 (2009) 1282 1287 Contents lists available at ScienceDirect Journal of Biomechanics journal homepage: www.elsevier.com/locate/jbiomech www.jbiomech.com Modular control of human
Journal of Biomechanics 42 (2009) 1282 1287 Contents lists available at ScienceDirect Journal of Biomechanics journal homepage: www.elsevier.com/locate/jbiomech www.jbiomech.com Modular control of human
A Pilot Study on Electromyographic Analysis of Single and Double Revolution Jumps in Figure Skating
 Journal of Exercise Science and Physiotherapy, Vol. 5, No. 1: 14-19, 2009 A Pilot Study on Electromyographic Analysis of Single and Double Revolution Jumps in Figure Skating Taylor¹, C. L. and Psycharakis²,
Journal of Exercise Science and Physiotherapy, Vol. 5, No. 1: 14-19, 2009 A Pilot Study on Electromyographic Analysis of Single and Double Revolution Jumps in Figure Skating Taylor¹, C. L. and Psycharakis²,
Posture influences ground reaction force: implications for crouch gait
 University of Tennessee, Knoxville From the SelectedWorks of Jeffrey A. Reinbolt July 14, 2010 Posture influences ground reaction force: implications for crouch gait H. X. Hoang Jeffrey A. Reinbolt, University
University of Tennessee, Knoxville From the SelectedWorks of Jeffrey A. Reinbolt July 14, 2010 Posture influences ground reaction force: implications for crouch gait H. X. Hoang Jeffrey A. Reinbolt, University
Artifacts Due to Filtering Mismatch in Drop Landing Moment Data
 Camenga et al. UW-L Journal of Undergraduate Research XVI (213) Artifacts Due to Filtering Mismatch in Drop Landing Moment Data Elizabeth T. Camenga, Casey J. Rutten, Brendan D. Gould, Jillian T. Asmus,
Camenga et al. UW-L Journal of Undergraduate Research XVI (213) Artifacts Due to Filtering Mismatch in Drop Landing Moment Data Elizabeth T. Camenga, Casey J. Rutten, Brendan D. Gould, Jillian T. Asmus,
Gait. Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa
 Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Simulation-based design to reduce metabolic cost
 Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
video Purpose Pathological Gait Objectives: Primary, Secondary and Compensatory Gait Deviations in CP AACPDM IC #3 1
 s in CP Disclosure Information AACPDM 71st Annual Meeting September 13-16, 2017 Speaker Names: Sylvia Ounpuu, MSc and Kristan Pierz, MD Differentiating Between, Secondary and Compensatory Mechanisms in
s in CP Disclosure Information AACPDM 71st Annual Meeting September 13-16, 2017 Speaker Names: Sylvia Ounpuu, MSc and Kristan Pierz, MD Differentiating Between, Secondary and Compensatory Mechanisms in
Modular organization across changing task demands in healthy and poststroke gait
 ORIGINAL RESEARCH Physiological Reports ISSN 2051-817X Modular organization across changing task demands in healthy and poststroke gait Rebecca L. Routson 1, Steven A. Kautz 2,3 & Richard R. Neptune 1
ORIGINAL RESEARCH Physiological Reports ISSN 2051-817X Modular organization across changing task demands in healthy and poststroke gait Rebecca L. Routson 1, Steven A. Kautz 2,3 & Richard R. Neptune 1
GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF
 GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF Sara Gharabaghli, Rebecca Krogstad, Sara Lynch, Sofia Saavedra, and Tamara Wright California State University, San Marcos, San Marcos,
GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF Sara Gharabaghli, Rebecca Krogstad, Sara Lynch, Sofia Saavedra, and Tamara Wright California State University, San Marcos, San Marcos,
Muscular activity characteristics associated with preparation for gait transition
 Available online at www.sciencedirect.com Journal of Sport and Health Science 1 (2012) 27e35 Original article Muscular activity characteristics associated with preparation for gait transition Li Li*, Lorna
Available online at www.sciencedirect.com Journal of Sport and Health Science 1 (2012) 27e35 Original article Muscular activity characteristics associated with preparation for gait transition Li Li*, Lorna
Megan E. Krause, BSBSE, Young Hui Chang, Ph.D. Comparative Neuromechanics Laboratory. Georgia Institute of Technology
 Megan E. Krause, BSBSE, Young Hui Chang, Ph.D. Comparative Neuromechanics Laboratory Sh School of Applied Physiology Georgia Institute of Technology 1 Variety of ankle constraints during locomotion: Fashion
Megan E. Krause, BSBSE, Young Hui Chang, Ph.D. Comparative Neuromechanics Laboratory Sh School of Applied Physiology Georgia Institute of Technology 1 Variety of ankle constraints during locomotion: Fashion
Comparison of Kinematics and Kinetics During Drop and Drop Jump Performance
 schouweiler, hess UW-L Journal of Undergraduate Research XIII (21) Comparison of Kinematics and Kinetics During Drop and Drop Jump Performance Ryan Schouweiler, Karina Hess Faculty Sponsor: Thomas Kernozek,
schouweiler, hess UW-L Journal of Undergraduate Research XIII (21) Comparison of Kinematics and Kinetics During Drop and Drop Jump Performance Ryan Schouweiler, Karina Hess Faculty Sponsor: Thomas Kernozek,
ASSISTED AND RESISTED METHODS FOR SPEED DEVELOPMENT (PART 1)
") ASSISTED AND RESISTED METHODS FOR SPEED DEVELOPMENT (PART 1) By Adrian Faccioni Adrian Faccioni, a lecturer at the Centre of Sports Studies, University of Canberra, Australia, presents a detailed evaluation
ASSISTED AND RESISTED METHODS FOR SPEED DEVELOPMENT (PART 1) By Adrian Faccioni Adrian Faccioni, a lecturer at the Centre of Sports Studies, University of Canberra, Australia, presents a detailed evaluation
Center of Mass Acceleration as a Surrogate for Force Production After Spinal Cord Injury Effects of Inclined Treadmill Walking
 Center of Mass Acceleration as a Surrogate for Force Production After Spinal Cord Injury Effects of Inclined Treadmill Walking Mark G. Bowden, PhD, PT Research Health Scientist, Ralph H. Johnson VA Medical
Center of Mass Acceleration as a Surrogate for Force Production After Spinal Cord Injury Effects of Inclined Treadmill Walking Mark G. Bowden, PhD, PT Research Health Scientist, Ralph H. Johnson VA Medical
WalkOn product range. Dynamic Ankle-Foot Orthoses. Information for specialist dealers
 WalkOn product range Dynamic Ankle-Foot Orthoses Information for specialist dealers WalkOn Flex WalkOn WalkOn Trimable WalkOn Reaction WalkOn Reaction plus One range Many different applications The WalkOn
WalkOn product range Dynamic Ankle-Foot Orthoses Information for specialist dealers WalkOn Flex WalkOn WalkOn Trimable WalkOn Reaction WalkOn Reaction plus One range Many different applications The WalkOn
Normal and Abnormal Gait
 Normal and Abnormal Gait Adrielle Fry, MD EvergreenHealth, Division of Sport and Spine University of Washington Board Review Course March 6, 2017 What are we going to cover? Definitions and key concepts
Normal and Abnormal Gait Adrielle Fry, MD EvergreenHealth, Division of Sport and Spine University of Washington Board Review Course March 6, 2017 What are we going to cover? Definitions and key concepts
PURPOSE. METHODS Design
 7 Murrary, M.P.; Sepic, S.B.; Gardner, G.M.; and Mollinger, L.A., "Gait patterns of above-knee amputees using constant-friction knee components," Bull Prosthet Res, 17(2):35-45, 1980. 8 Godfrey, C.M.;
7 Murrary, M.P.; Sepic, S.B.; Gardner, G.M.; and Mollinger, L.A., "Gait patterns of above-knee amputees using constant-friction knee components," Bull Prosthet Res, 17(2):35-45, 1980. 8 Godfrey, C.M.;
Feedback and Feedforward Locomotor Adaptations to Ankle-Foot Load in People With Incomplete Spinal Cord Injury
 J Neurophysiol 104: 1325 1338, 2010. First published June 23, 2010; doi:10.1152/jn.00604.2009. Feedback and Feedforward Locomotor Adaptations to Ankle-Foot Load in People With Incomplete Spinal Cord Injury
J Neurophysiol 104: 1325 1338, 2010. First published June 23, 2010; doi:10.1152/jn.00604.2009. Feedback and Feedforward Locomotor Adaptations to Ankle-Foot Load in People With Incomplete Spinal Cord Injury
RUNNING SHOE STIFFNESS: THE EFFECT ON WALKING GAIT
 RUNNING SHOE STIFFNESS: THE EFFECT ON WALKING GAIT Stephen N Stanley, Peter J M c Nair, Angela G Walker, & Robert N Marshall Auckland Institute of Technology, Auckland, New Zealand University of Auckland,
RUNNING SHOE STIFFNESS: THE EFFECT ON WALKING GAIT Stephen N Stanley, Peter J M c Nair, Angela G Walker, & Robert N Marshall Auckland Institute of Technology, Auckland, New Zealand University of Auckland,
Available online at Prediction of energy efficient pedal forces in cycling using musculoskeletal simulation models
 Available online at www.sciencedirect.com Engineering 2 00 (2010) (2009) 3211 3215 000 000 Engineering www.elsevier.com/locate/procedia 8 th Conference of the International Sports Engineering Association
Available online at www.sciencedirect.com Engineering 2 00 (2010) (2009) 3211 3215 000 000 Engineering www.elsevier.com/locate/procedia 8 th Conference of the International Sports Engineering Association
Increasing ankle push-off work with a powered prosthesis does not necessarily reduce metabolic rate for transtibial amputees
 Supplementary Materials Increasing ankle push-off work with a powered prosthesis does not necessarily reduce metabolic rate for transtibial amputees Roberto E. Quesada, Joshua M. Caputo,, and Steven H.
Supplementary Materials Increasing ankle push-off work with a powered prosthesis does not necessarily reduce metabolic rate for transtibial amputees Roberto E. Quesada, Joshua M. Caputo,, and Steven H.
A bit of background. Session Schedule 3:00-3:10: Introduction & session overview. Overarching research theme: CPTA
 A Cognitive-Biomechanical Perspective for the Management of Common Chronic Musculoskeletal Conditions Skulpan Asavasopon, PT, PhD Loma Linda University Christopher M. Powers, PT, PhD, FAPTA University
A Cognitive-Biomechanical Perspective for the Management of Common Chronic Musculoskeletal Conditions Skulpan Asavasopon, PT, PhD Loma Linda University Christopher M. Powers, PT, PhD, FAPTA University
Motion Analysis on Backward Walking: Kinetics, Kinematics, and Electromyography
 Motion Analysis on Backward Walking: Kinetics, Kinematics, and Electromyography Min Hyeon Lee The Graduate School Yonsei University Department of Biomedical Engineering Motion Analysis on Backward Walking:
Motion Analysis on Backward Walking: Kinetics, Kinematics, and Electromyography Min Hyeon Lee The Graduate School Yonsei University Department of Biomedical Engineering Motion Analysis on Backward Walking:
video Outline Pre-requisites of Typical Gait Case Studies Case 1 L5 Myelomeningocele Case 1 L5 Myelomeningocele
 Outline Evaluation of Orthosis Function in Children with Neuromuscular Disorders Using Motion Analysis Outcomes Terminology Methods Typically developing Case examples variety of pathologies Sylvia Õunpuu,
Outline Evaluation of Orthosis Function in Children with Neuromuscular Disorders Using Motion Analysis Outcomes Terminology Methods Typically developing Case examples variety of pathologies Sylvia Õunpuu,
Stride Time Calculation from EMG and Foot Switch Data and Finding Corelation between Them for Prosthetic Control
 2012 International Conference on Environment Science and Engieering IPCBEE vol.3 2(2012) (2012)IACSIT Press, Singapoore Stride Time Calculation from EMG and Foot Switch Data and Finding Corelation between
2012 International Conference on Environment Science and Engieering IPCBEE vol.3 2(2012) (2012)IACSIT Press, Singapoore Stride Time Calculation from EMG and Foot Switch Data and Finding Corelation between
Muscles that support the body also modulate forward progression during walking
 ARTICLE IN PRESS Journal of Biomechanics 39 (6) 63 63 www.elsevier.com/locate/jbiomech www.jbiomech.com Muscles that support the body also modulate forward progression during walking May Q. Liu a,b, Frank
ARTICLE IN PRESS Journal of Biomechanics 39 (6) 63 63 www.elsevier.com/locate/jbiomech www.jbiomech.com Muscles that support the body also modulate forward progression during walking May Q. Liu a,b, Frank
Accepted Manuscript. Muscle recruitment and coordination with an ankle exoskeleton
 Accepted Manuscript Muscle recruitment and coordination with an ankle exoskeleton Katherine M. Steele, Rachel W. Jackson, Benjamin Shuman, Steven H. Collins PII: S001-990(17)306- DOI: http://dx.doi.org/10.1016/j.jbiomech.017.05.010
Accepted Manuscript Muscle recruitment and coordination with an ankle exoskeleton Katherine M. Steele, Rachel W. Jackson, Benjamin Shuman, Steven H. Collins PII: S001-990(17)306- DOI: http://dx.doi.org/10.1016/j.jbiomech.017.05.010
The Starting Point. Prosthetic Alignment in the Transtibial Amputee. Outline. COM Motion in the Coronal Plane
 Prosthetic Alignment in the Transtibial Amputee The Starting Point David C. Morgenroth, MD, Department of Rehabilitation Medicine University of Washington VAPSHCS Outline COM Motion in the Coronal Plane
Prosthetic Alignment in the Transtibial Amputee The Starting Point David C. Morgenroth, MD, Department of Rehabilitation Medicine University of Washington VAPSHCS Outline COM Motion in the Coronal Plane
Effects of Mass and Momentum of Inertia Alternation on Individual Muscle Forces During Swing Phase of Transtibial Amputee Gait
 Kobe J. Med. Sci., Vol. 56, No. 3, pp. E92-E97, 21 Effects of Mass and Momentum of Inertia Alternation on Individual Muscle Forces During Swing Phase of Transtibial Amputee Gait YAGHOUB DABIRI 1, SIAMAK
Kobe J. Med. Sci., Vol. 56, No. 3, pp. E92-E97, 21 Effects of Mass and Momentum of Inertia Alternation on Individual Muscle Forces During Swing Phase of Transtibial Amputee Gait YAGHOUB DABIRI 1, SIAMAK
INTRODUCTION TO GAIT ANALYSIS DATA
 INTRODUCTION TO GAIT ANALYSIS DATA 1. Phases of gait a. Stance (% gc) i. Loading response (10%) ii. Mid- and terminal stance (%) iii. Pre-swing (10%) b. Swing (% gc) i. Initial swing ii. Mid-swing iii.
INTRODUCTION TO GAIT ANALYSIS DATA 1. Phases of gait a. Stance (% gc) i. Loading response (10%) ii. Mid- and terminal stance (%) iii. Pre-swing (10%) b. Swing (% gc) i. Initial swing ii. Mid-swing iii.
Inertial compensation for belt acceleration in an instrumented treadmill
 Inertial compensation for belt acceleration in an instrumented treadmill Sandra K. Hnat, Antonie J. van den Bogert Department of Mechanical Engineering, Cleveland State University Cleveland, OH 44115,
Inertial compensation for belt acceleration in an instrumented treadmill Sandra K. Hnat, Antonie J. van den Bogert Department of Mechanical Engineering, Cleveland State University Cleveland, OH 44115,
Journal of Biomechanics
 Journal of Biomechanics 45 (2012) 2157 2163 Contents lists available at SciVerse ScienceDirect Journal of Biomechanics journal homepage: www.elsevier.com/locate/jbiomech www.jbiomech.com Three-dimensional
Journal of Biomechanics 45 (2012) 2157 2163 Contents lists available at SciVerse ScienceDirect Journal of Biomechanics journal homepage: www.elsevier.com/locate/jbiomech www.jbiomech.com Three-dimensional
Assessments SIMPLY GAIT. Posture and Gait. Observing Posture and Gait. Postural Assessment. Postural Assessment 6/28/2016
 Assessments 2 SIMPLY GAIT Understanding movement Evaluations of factors that help therapist form professional judgments Include health, palpatory, range of motion, postural, and gait assessments Assessments
Assessments 2 SIMPLY GAIT Understanding movement Evaluations of factors that help therapist form professional judgments Include health, palpatory, range of motion, postural, and gait assessments Assessments
Running injuries - what are the most important factors
 Created as a free resource by Clinical Edge Based on Physio Edge podcast 59 with Greg Lehman, Tom Goom and Dr Christian Barton Get your free trial of online Physio education at Why do runners get injured?
Created as a free resource by Clinical Edge Based on Physio Edge podcast 59 with Greg Lehman, Tom Goom and Dr Christian Barton Get your free trial of online Physio education at Why do runners get injured?
G-EOL. Discover the simplicity of gait therapy intended for daily use
 G-EOL Discover the simplicity of gait therapy intended for daily use Reha Technology a passion for robotic-assisted gait therapy For over 10 years, Reha Technology has been successfully developing innovative,
G-EOL Discover the simplicity of gait therapy intended for daily use Reha Technology a passion for robotic-assisted gait therapy For over 10 years, Reha Technology has been successfully developing innovative,
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Developing ankle exoskeleton assistance strategies by leveraging the mechanisms involved in human locomotion
 Developing ankle exoskeleton assistance strategies by leveraging the mechanisms involved in human locomotion Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
Developing ankle exoskeleton assistance strategies by leveraging the mechanisms involved in human locomotion Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system
 An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
Kinematic and kinetic factors that correlate with improved knee flexion following treatment for stiff-knee gait
 ARTICLE IN PRESS Journal of Biomechanics 39 (2006) 689 698 www.elsevier.com/locate/jbiomech www.jbiomech.com Kinematic and kinetic factors that correlate with improved knee flexion following treatment
ARTICLE IN PRESS Journal of Biomechanics 39 (2006) 689 698 www.elsevier.com/locate/jbiomech www.jbiomech.com Kinematic and kinetic factors that correlate with improved knee flexion following treatment
-Elastic strain energy (duty factor decreases at higher speeds). Higher forces act on feet. More tendon stretch. More energy stored in tendon.
. Higher forces act on feet. More tendon stretch. More energy stored in tendon.") As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
Myths and Science in Cycling
 Myths and Science in Cycling John McDaniel, PhD Kent State University Jim Martin, PhD - U of Utah Steve Elmer, PhD- Michigan Tech Who am I PhD in Exercise Physiology under Dr. Jim Martin at the University
Myths and Science in Cycling John McDaniel, PhD Kent State University Jim Martin, PhD - U of Utah Steve Elmer, PhD- Michigan Tech Who am I PhD in Exercise Physiology under Dr. Jim Martin at the University
Muscle force redistributes segmental power for body progression during walking
 Gait and Posture 19 (2004) 194 205 Muscle force redistributes segmental power for body progression during walking R.R. Neptune a,b,, F.E. Zajac b,c,d, S.A. Kautz b,e,f,g a Department of Mechanical Engineering,
Gait and Posture 19 (2004) 194 205 Muscle force redistributes segmental power for body progression during walking R.R. Neptune a,b,, F.E. Zajac b,c,d, S.A. Kautz b,e,f,g a Department of Mechanical Engineering,
KOTARO SASAKI Curriculum Vitae
 KOTARO SASAKI Curriculum Vitae Department of Mechanical & Biomedical Engineering Boise State University 1910 University Dr. Boise ID 83725-2075 Phone: (208) 426-4027 Email: kosasaki@boisestate.edu EDUCATION
KOTARO SASAKI Curriculum Vitae Department of Mechanical & Biomedical Engineering Boise State University 1910 University Dr. Boise ID 83725-2075 Phone: (208) 426-4027 Email: kosasaki@boisestate.edu EDUCATION
empower Reclaim your power. Information for technicians empower Ottobock 1
 empower Reclaim your power. Information for technicians empower Ottobock 1 empower Powered propulsion for more freedom in life The empower Ankle is an innovation in the field of prosthetic feet. It is
empower Reclaim your power. Information for technicians empower Ottobock 1 empower Powered propulsion for more freedom in life The empower Ankle is an innovation in the field of prosthetic feet. It is
Gait Analysis at Your Fingertips:
 Gait Analysis at Your Fingertips: Enhancing Observational Gait Analysis Using Mobile Device Technology and the Edinburgh Visual Gait Scale Jon R. Davids, MD; Shriners Hospitals for Children Northern California;
Gait Analysis at Your Fingertips: Enhancing Observational Gait Analysis Using Mobile Device Technology and the Edinburgh Visual Gait Scale Jon R. Davids, MD; Shriners Hospitals for Children Northern California;
DIFFERENCE BETWEEN TAEKWONDO ROUNDHOUSE KICK EXECUTED BY THE FRONT AND BACK LEG - A BIOMECHANICAL STUDY
 268 Isas 2000! Hong Kong DIFFERENCE BETWEEN TAEKWONDO ROUNDHOUSE KICK EXECUTED BY THE FRONT AND BACK LEG - A BIOMECHANICAL STUDY Pui-Wah Kong, Tze-Chung Luk and Youlian Hong The Chinese University of Hong
268 Isas 2000! Hong Kong DIFFERENCE BETWEEN TAEKWONDO ROUNDHOUSE KICK EXECUTED BY THE FRONT AND BACK LEG - A BIOMECHANICAL STUDY Pui-Wah Kong, Tze-Chung Luk and Youlian Hong The Chinese University of Hong
Changes in the activation and function of the ankle plantar flexor muscles due to gait retraining in chronic stroke survivors
 Knarr et al. Journal of NeuroEngineering and Rehabilitation 2013, 10:12 JOURNAL OF NEUROENGINEERING JNERAND REHABILITATION RESEARCH Open Access Changes in the activation and function of the ankle plantar
Knarr et al. Journal of NeuroEngineering and Rehabilitation 2013, 10:12 JOURNAL OF NEUROENGINEERING JNERAND REHABILITATION RESEARCH Open Access Changes in the activation and function of the ankle plantar
Empower. Reclaim your power. Information for technicians. Empower Ottobock 1
 Empower Reclaim your power. Information for technicians Empower Ottobock 1 Empower Powered propulsion for more freedom in life The Empower is an innovation in the field of prosthetic feet. It is equipped
Empower Reclaim your power. Information for technicians Empower Ottobock 1 Empower Powered propulsion for more freedom in life The Empower is an innovation in the field of prosthetic feet. It is equipped
NIH Public Access Author Manuscript Gait Posture. Author manuscript; available in PMC 2009 May 1.
 NIH Public Access Author Manuscript Published in final edited form as: Gait Posture. 2008 May ; 27(4): 710 714. Two simple methods for determining gait events during treadmill and overground walking using
NIH Public Access Author Manuscript Published in final edited form as: Gait Posture. 2008 May ; 27(4): 710 714. Two simple methods for determining gait events during treadmill and overground walking using
An investigation of lower-extremity functional asymmetry for nonpreferred able-bodied walking speeds
 Original Research An investigation of lower-extremity functional asymmetry for nonpreferred able-bodied walking speeds JOHN RICE* and MATTHEW K. SEELEY Department of Exercise Sciences; 106 SFH; Brigham
Original Research An investigation of lower-extremity functional asymmetry for nonpreferred able-bodied walking speeds JOHN RICE* and MATTHEW K. SEELEY Department of Exercise Sciences; 106 SFH; Brigham
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
Passive Swing Assistive Exoskeletons for Motor-Incomplete Spinal Cord Injury Patients
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 FrB8.4 Passive Swing Assistive Exoskeletons for Motor-Incomplete Spinal Cord Injury Patients Kalyan K Mankala,
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 FrB8.4 Passive Swing Assistive Exoskeletons for Motor-Incomplete Spinal Cord Injury Patients Kalyan K Mankala,
A New Approach to Modeling Vertical Stiffness in Heel-Toe Distance Runners
 Brigham Young University BYU ScholarsArchive All Faculty Publications 2003-12-01 A New Approach to Modeling Vertical Stiffness in Heel-Toe Distance Runners Iain Hunter iain_hunter@byu.edu Follow this and
Brigham Young University BYU ScholarsArchive All Faculty Publications 2003-12-01 A New Approach to Modeling Vertical Stiffness in Heel-Toe Distance Runners Iain Hunter iain_hunter@byu.edu Follow this and
Contributions of muscle forces and toe-off kinematics to peak knee flexion during the swing phase of normal gait: an induced position analysis
 Journal of Biomechanics 37 (2004) 731 737 Contributions of muscle forces and toe-off kinematics to peak knee flexion during the swing phase of normal gait: an induced position analysis Frank C. Anderson
Journal of Biomechanics 37 (2004) 731 737 Contributions of muscle forces and toe-off kinematics to peak knee flexion during the swing phase of normal gait: an induced position analysis Frank C. Anderson
Below-knee amputation: a comparison of the effect of the SACH foot and single axis foot on electromyographic patterns during locomotion
 Prosthetics and Orthotics International, 1986, 10, 15-22 Below-knee amputation: a comparison of the effect of the SACH foot and single axis foot on electromyographic patterns during locomotion E. G. CULHAM,
Prosthetics and Orthotics International, 1986, 10, 15-22 Below-knee amputation: a comparison of the effect of the SACH foot and single axis foot on electromyographic patterns during locomotion E. G. CULHAM,
CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT
 39 CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT 4.1 Modeling in Biomechanics The human body, apart of all its other functions is a mechanical mechanism and a structure,
39 CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT 4.1 Modeling in Biomechanics The human body, apart of all its other functions is a mechanical mechanism and a structure,
TEN YEARS IN LOCOMOTION CONTROL RESEARCH
 TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
TEN YEARS IN LOCOMOTION CONTROL RESEARCH Jehee Lee Seoul National University [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee et al, Data-driven biped control [SIGGRAPH 2010] Lee
The Influence of High Heeled Shoes on Kinematics, Kinetics, and Muscle EMG of Normal Female Gait
 JOURNAL OF APPLIED BIOMECHANICS, 2000, 16, 309-319 2000 by Human Kinetics Publishers, Inc. The Influence of High Heeled Shoes on Kinematics, Kinetics, and Muscle EMG of Normal Female Gait Darren J. Stefanyshyn,
JOURNAL OF APPLIED BIOMECHANICS, 2000, 16, 309-319 2000 by Human Kinetics Publishers, Inc. The Influence of High Heeled Shoes on Kinematics, Kinetics, and Muscle EMG of Normal Female Gait Darren J. Stefanyshyn,
The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women
 The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women *Guha Thakurta A, Iqbal R and De A National Institute of Industrial Engineering, Powai, Vihar Lake, Mumbai-400087, India,
The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women *Guha Thakurta A, Iqbal R and De A National Institute of Industrial Engineering, Powai, Vihar Lake, Mumbai-400087, India,
Brief Biomechanical Analysis on the Walking of Spinal Cord Injury Patients with a Lower Limb Exoskeleton Robot
 13 IEEE International Conference on Rehabilitation Robotics June 24-26, 13 Seattle, Washington USA Brief Biomechanical Analysis on the Walking of Spinal Cord Injury Patients with a Lower Limb Exoskeleton
13 IEEE International Conference on Rehabilitation Robotics June 24-26, 13 Seattle, Washington USA Brief Biomechanical Analysis on the Walking of Spinal Cord Injury Patients with a Lower Limb Exoskeleton
Muscle force distribution during forward and backward locomotion
 Acta of Bioengineering and Biomechanics Vol. 15, No. 3, 2013 Original paper DOI: 10.5277/abb130301 First award of Morecki & Fidelus Scientific Awards Muscle force distribution during forward and backward
Acta of Bioengineering and Biomechanics Vol. 15, No. 3, 2013 Original paper DOI: 10.5277/abb130301 First award of Morecki & Fidelus Scientific Awards Muscle force distribution during forward and backward
C-Brace Orthotronic Mobility System
 C-Brace Orthotronic Mobility System You ll always remember your first step Information for practitioners C-Brace Orthotics reinvented Until now, you and your patients with conditions like incomplete spinal
C-Brace Orthotronic Mobility System You ll always remember your first step Information for practitioners C-Brace Orthotics reinvented Until now, you and your patients with conditions like incomplete spinal
Does isolated hip abductor fatigue lead to biomechanical changes of trunk, pelvis and lower leg during single-leg landing?
 Does isolated hip abductor fatigue lead to biomechanical changes of trunk, pelvis and lower leg during single-leg landing? Yu Iwama 1, Kengo Harato 1, Satoshi Imai 2, Aiko Sakurai 1, Yutaro Morishige 1,
Does isolated hip abductor fatigue lead to biomechanical changes of trunk, pelvis and lower leg during single-leg landing? Yu Iwama 1, Kengo Harato 1, Satoshi Imai 2, Aiko Sakurai 1, Yutaro Morishige 1,
Gait Analyser. Description of Walking Performance
 Gait Analyser Description of Walking Performance This brochure will help you to understand clearly the parameters described in the report of the Gait Analyser, provide you with tips to implement the walking
Gait Analyser Description of Walking Performance This brochure will help you to understand clearly the parameters described in the report of the Gait Analyser, provide you with tips to implement the walking
Mechanical energy fluctuations during hill walking: the effects of slope on inverted pendulum exchange
 4895 The Journal of Experimental Biology 209, 4895-4900 Published by The Company of Biologists 2006 doi:10.1242/jeb.02584 Mechanical energy fluctuations during hill walking: the effects of slope on inverted
4895 The Journal of Experimental Biology 209, 4895-4900 Published by The Company of Biologists 2006 doi:10.1242/jeb.02584 Mechanical energy fluctuations during hill walking: the effects of slope on inverted
Relationship between Ground Reaction Force and Stability Level of the Lower Extremity in Runners Background: Objective: Design and Setting:
 Relationship between Ground Reaction Force and Stability Level of the Lower Extremity in Runners Kimitake Sato, Monique Butcher-Mokha Barry University Miami Shores, FL Background: Neuromuscular control
Relationship between Ground Reaction Force and Stability Level of the Lower Extremity in Runners Kimitake Sato, Monique Butcher-Mokha Barry University Miami Shores, FL Background: Neuromuscular control
Biomechanical Analysis of Race Walking Compared to Normal Walking and Running Gait
 University of Kentucky UKnowledge Theses and Dissertations--Kinesiology and Health Promotion Kinesiology and Health Promotion 2015 Biomechanical Analysis of Race Walking Compared to Normal Walking and
University of Kentucky UKnowledge Theses and Dissertations--Kinesiology and Health Promotion Kinesiology and Health Promotion 2015 Biomechanical Analysis of Race Walking Compared to Normal Walking and
The importance of swing-phase initial conditions in stiff-knee gait
 ARTICLE IN PRESS Journal of Biomechanics 36 (2003) 1111 1116 The importance of swing-phase initial conditions in stiff-knee gait Saryn R. Goldberg a, Sylvia *Ounpuu b, Scott L. Delp a, * a Mechanical Engineering
ARTICLE IN PRESS Journal of Biomechanics 36 (2003) 1111 1116 The importance of swing-phase initial conditions in stiff-knee gait Saryn R. Goldberg a, Sylvia *Ounpuu b, Scott L. Delp a, * a Mechanical Engineering
Positive running posture sums up the right technique for top speed
 Positive running, a model for high speed running Frans Bosch positive running posture sums up the right technique for top speed building blocks in running: Pelvic rotation for- and backward and hamstring
Positive running, a model for high speed running Frans Bosch positive running posture sums up the right technique for top speed building blocks in running: Pelvic rotation for- and backward and hamstring
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance
 Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
Biomechanics analysis of human walking with load carriage
 Technology and Health Care 23 (2015) S567 S575 DOI 10.3233/THC-150995 IOS Press S567 Biomechanics analysis of human walking with load carriage Xiuxia Yang, Guorong Zhao, Di Liu, Weiei Zhou and Hewei Zhao
Technology and Health Care 23 (2015) S567 S575 DOI 10.3233/THC-150995 IOS Press S567 Biomechanics analysis of human walking with load carriage Xiuxia Yang, Guorong Zhao, Di Liu, Weiei Zhou and Hewei Zhao
SPRINTING CHARACTERISTICS OF WOMEN S 100 METER FINALS AT THE IAAF WORLD CHAMPIONSHOPS DAEGU 2011
 9:30-9:45 am Sang-Kyoon Park. Sprinting characteristics of women's 100 meter finals at the IAAF world championships Daegu 2011. (228) SPRINTING CHARACTERISTICS OF WOMEN S 100 METER FINALS AT THE IAAF WORLD
9:30-9:45 am Sang-Kyoon Park. Sprinting characteristics of women's 100 meter finals at the IAAF world championships Daegu 2011. (228) SPRINTING CHARACTERISTICS OF WOMEN S 100 METER FINALS AT THE IAAF WORLD
Ankle plantar flexor force production is an important determinant of the preferred walk-to-run transition speed
 The Journal of Experimental Biology 28, 799-88 Published by The Company of Biologists 25 doi:.242/jeb.435 799 Ankle plantar flexor force production is an important determinant of the preferred walk-to-run
The Journal of Experimental Biology 28, 799-88 Published by The Company of Biologists 25 doi:.242/jeb.435 799 Ankle plantar flexor force production is an important determinant of the preferred walk-to-run
Neuromuscular changes for hopping on a range of damped surfaces
 J Appl Physiol 96: 1996 2004, 2004. First published December 19, 2003; 10.1152/japplphysiol.00983.2003. HIGHLIGHTED TOPIC Neural Control of Movement Neuromuscular changes for hopping on a range of damped
J Appl Physiol 96: 1996 2004, 2004. First published December 19, 2003; 10.1152/japplphysiol.00983.2003. HIGHLIGHTED TOPIC Neural Control of Movement Neuromuscular changes for hopping on a range of damped
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
Steffen Willwacher, Katina Fischer, Gert Peter Brüggemann Institute of Biomechanics and Orthopaedics, German Sport University, Cologne, Germany
 P01-3 ID126 SURFACE STIFFNESS AFFECTS JOINT LOADING IN RUNNING Steffen Willwacher, Katina Fischer, Gert Peter Brüggemann Institute of Biomechanics and Orthopaedics, German Sport University, Cologne, Germany
P01-3 ID126 SURFACE STIFFNESS AFFECTS JOINT LOADING IN RUNNING Steffen Willwacher, Katina Fischer, Gert Peter Brüggemann Institute of Biomechanics and Orthopaedics, German Sport University, Cologne, Germany
DEVELOPMENT OF REAL-TIME EMG SONIFICATION SYSTEM FOR GAIT
 The 24 th International Conference on Auditory Display (ICAD 218) June 1-15, 218, Michigan Technological University DEVELOPMENT OF REAL-TIME EMG SONIFICATION SYSTEM FOR GAIT ABSTRACT We developed a system
The 24 th International Conference on Auditory Display (ICAD 218) June 1-15, 218, Michigan Technological University DEVELOPMENT OF REAL-TIME EMG SONIFICATION SYSTEM FOR GAIT ABSTRACT We developed a system
THE ANKLE-HIP TRANSVERSE PLANE COUPLING DURING THE STANCE PHASE OF NORMAL WALKING
 THE ANKLE-HIP TRANSVERSE PLANE COUPLING DURING THE STANCE PHASE OF NORMAL WALKING Thales R. Souza, Rafael Z. Pinto, Renato G. Trede, Nadja C. Pereira, Renata N. Kirkwood and Sérgio T. Fonseca. Movement
THE ANKLE-HIP TRANSVERSE PLANE COUPLING DURING THE STANCE PHASE OF NORMAL WALKING Thales R. Souza, Rafael Z. Pinto, Renato G. Trede, Nadja C. Pereira, Renata N. Kirkwood and Sérgio T. Fonseca. Movement
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal
 Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal Sérgio Tosi Rodrigues 1, Valéria Duarte Garcia 1,2, Arturo Forner- Cordero
Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal Sérgio Tosi Rodrigues 1, Valéria Duarte Garcia 1,2, Arturo Forner- Cordero
GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE. by Mehmet Temel
 GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE by Mehmet Temel A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the
GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE by Mehmet Temel A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the
Gait & Posture 31 (2010) Contents lists available at ScienceDirect. Gait & Posture. journal homepage:
 Contents lists available at ScienceDirect. Gait & Posture. journal homepage:") Gait & Posture 31 (2010) 311 316 Contents lists available at ScienceDirect Gait & Posture journal homepage: www.elsevier.com/locate/gaitpost Differences in self-selected and fastest-comfortable walking
Gait & Posture 31 (2010) 311 316 Contents lists available at ScienceDirect Gait & Posture journal homepage: www.elsevier.com/locate/gaitpost Differences in self-selected and fastest-comfortable walking
RESEARCH ARTICLE Biomechanics and energetics of walking on uneven terrain
 3963 The Journal of Experimental Biology 26, 3963-397 23. Published by The Company of Biologists Ltd doi:.242/jeb.87 RESEARCH ARTICLE Biomechanics and energetics of walking on uneven terrain Alexandra
3963 The Journal of Experimental Biology 26, 3963-397 23. Published by The Company of Biologists Ltd doi:.242/jeb.87 RESEARCH ARTICLE Biomechanics and energetics of walking on uneven terrain Alexandra
The effect of walking speed on muscle function and mechanical energetics
 Available online at www.sciencedirect.com Gait & Posture 28 (2008) 135 143 www.elsevier.com/locate/gaitpost The effect of walking speed on muscle function and mechanical energetics Richard R. Neptune a,
Available online at www.sciencedirect.com Gait & Posture 28 (2008) 135 143 www.elsevier.com/locate/gaitpost The effect of walking speed on muscle function and mechanical energetics Richard R. Neptune a,
NIH Public Access Author Manuscript J Biomech. Author manuscript; available in PMC 2011 August 10.
 NIH Public Access Author Manuscript Published in final edited form as: J Biomech. 2010 August 10; 43(11): 2099 2105. doi:10.1016/j.jbiomech.2010.04.003. Muscle contributions to support and progression
NIH Public Access Author Manuscript Published in final edited form as: J Biomech. 2010 August 10; 43(11): 2099 2105. doi:10.1016/j.jbiomech.2010.04.003. Muscle contributions to support and progression
EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT
 EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT PROJECT REFERENCE NO. : 37S0925 COLLEGE : NEW HORIZON COLLEGE OF ENGINEERING, BANGALORE BRANCH : MECHANICAL ENGINEERING GUIDES : DR GANESHA PRASAD
EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT PROJECT REFERENCE NO. : 37S0925 COLLEGE : NEW HORIZON COLLEGE OF ENGINEERING, BANGALORE BRANCH : MECHANICAL ENGINEERING GUIDES : DR GANESHA PRASAD
CHAPTER 3 POSTURAL THREAT
 CHAPTER 3 POSTURAL THREAT Postural threat during walking: effects on energy cost and accompanying gait changes IJmker T, Lamoth CJ, Houdijk H, Van der Woude LH, Beek PJ. Journal of Neuroengineering and
CHAPTER 3 POSTURAL THREAT Postural threat during walking: effects on energy cost and accompanying gait changes IJmker T, Lamoth CJ, Houdijk H, Van der Woude LH, Beek PJ. Journal of Neuroengineering and
The effects of a suspended-load backpack on gait
 Industrial and Manufacturing Systems Engineering Publications Industrial and Manufacturing Systems Engineering 2009 The effects of a suspended-load backpack on gait Xu Xu North Carolina State University
Industrial and Manufacturing Systems Engineering Publications Industrial and Manufacturing Systems Engineering 2009 The effects of a suspended-load backpack on gait Xu Xu North Carolina State University