TuA1.1P IEEE RO-MAN: The 22nd IEEE International Symposium on Robot and Human Interactive Communication Gyeongju, Korea, August 26-29, 2013
|
|
|
- Alexina Gray
- 5 years ago
- Views:
Transcription

1 2013 IEEE RO-MAN: The 22nd IEEE International Symposium on Robot and Human Interactive Communication Gyeongju, Korea, August 26-29, 2013 TuA1.1P /13/$ IEEE 220
![rates above 80% are achieved when identifying one out of 30-36 subjects [9,10,14,15].](/docs-images/85/92753570/images/2-0.jpg "Most approaches segment the continuous data into single strides, and calculate the similarity between the test sample and the training templates, assembled in the gait gallery.")
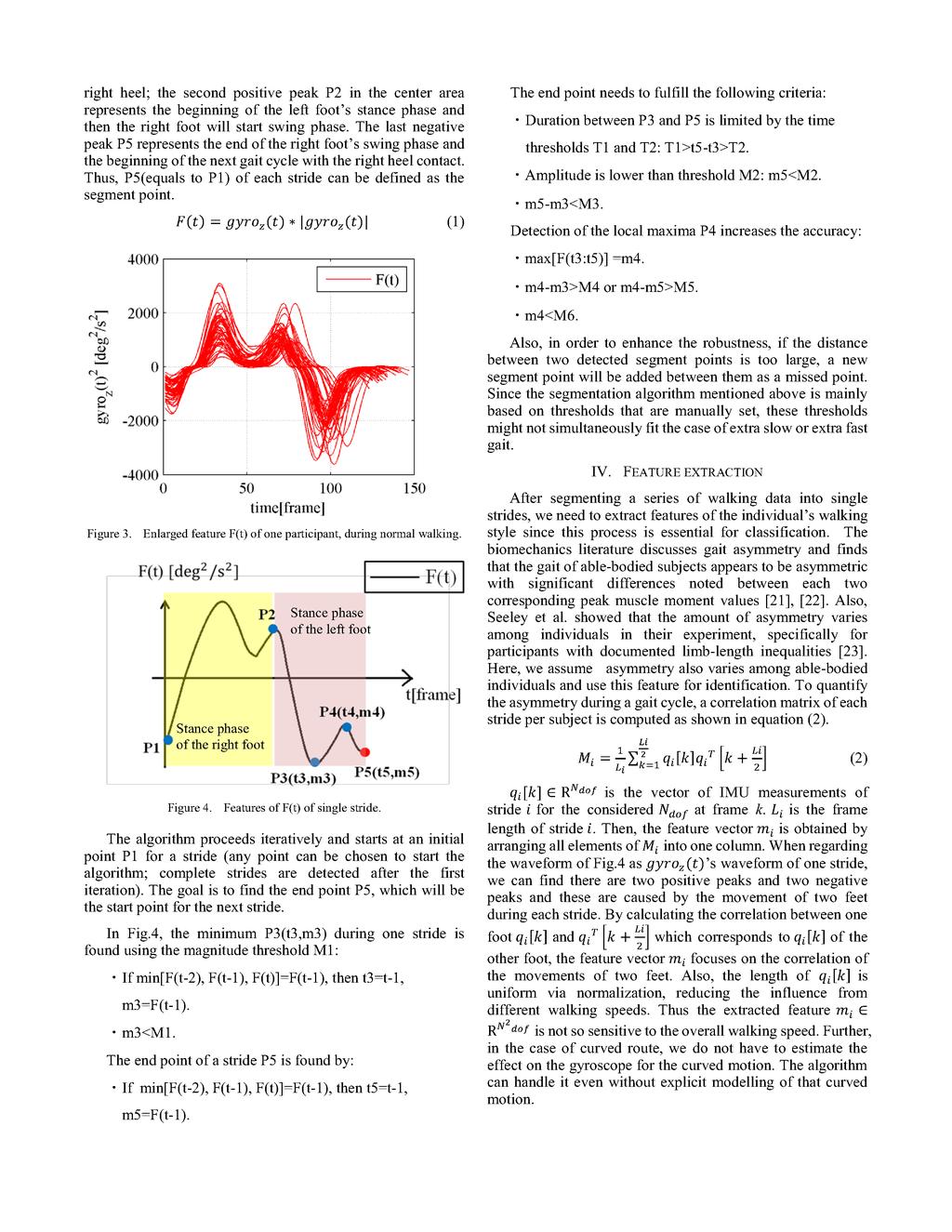
2 rates above 80% are achieved when identifying one out of subjects [9,10,14,15]. Most approaches segment the continuous data into single strides, and calculate the similarity between the test sample and the training templates, assembled in the gait gallery. Only a few approaches avoid segmentation into single strides, e.g., [9, 16]. The closest match between a test gait cycle and a template in the gait gallery is found by a similarity score applied to pre-processed measures of the IMU [4] or dynamic time warping [5,7]. Descriptive statistics of each gait cycle are calculated as features in [17] and a decision tree or neural network is used for classification. [10] calculates the correlation between the test cycle and the template separately for the left and the right step [10]. They segment the data into single steps, but do not recognize whether it is a left or right step. During classification, they correlate the templates of the left and the right step with both steps of the test cycle. The maximum correlation describes the closeness to a template of the gallery. However, they do not consider the correlation between the left step and the right step of the same stride. We investigate whether the asymmetry in walking can be used to identify a person. Therefore, we introduce a feature which correlates the measures of the left step with the measures of the right step of the same stride. Related work investigates the following conditions which may affect recognition accuracy: different footwear [30], walking over several days [5,15], and carrying a backpack [8]. Different sensor placement between the trials is included when recording over several days [5,11,15] or is considered explicitly for recording in one session [8]. This aspect is of importance because small variations in the position of the sensor on the body cannot be avoided. We also include slight variations of the sensor placement when recording our dataset. Furthermore, we investigate the robustness of identification against variations in speed. [11] includes slow, normal, and fast gait cycles into the gait gallery and report an equal error ratio of 7%. We further investigate the impact of speed when slow or fast walking is not included in the training data and how the symmetry-based approach is influenced by speed changes. Furthermore, walking on a curved route versus straight walking has not yet been considered when recording gait data with IMU. Walking on a curved route is a great challenge for computer vision, because the perspective changes. Considering this aspect, motion capture with IMUs is preferable. We investigate to what extent an identification approach developed for straight walking can be transferred to walking on a curved route without further modifying the method. III. SEGMENTATION In order to realize online recognition and increase the number of gait samples, an auto-segmentation process is necessary. Segmentation is the process of extracting the temporal extents of single strides from continuous time series data of gait. In this paper, we are aiming for a computationally light segmentation method to detect a single stride based only on the sensor at the belt. A. Significant dimension for segmentation First, we analyzed single stride hip movement waveforms of 20 subjects during normal gait and concluded that they share the same significant features. One participant VVLQJOH stride data of an IMU attached to the pelvis (forward centered) are extracted manually and spectral analysis results are shown in Fig.2 as an example. The z-axis is the axis of forward direction of movement and this direction can be automatically determined in the case of arbitrary sensor orientation. As can be seen in Fig. 2, the angular velocity about the z-axis, CUNK í :P; has less noise than the other components. Furthermore, CUNK í :P; has two principal frequencies which are shown as two positive peaks, the smaller one (around 1.5Hz) represents the frequency of a single stride and the larger one (around 3Hz) represents the frequency of single steps. We can observe that the waveform of a single stride of CUNK í :P; has more obvious features than other degrees of freedom, even after using a Butterworth low pass filter (3Hz). Therefore, the rotational speed CUNK í :P; from the sensor on the pelvis is chosen as the significant dimension for segmentation. Figure 2. Frequency analysis and waveform of single strides of a participant. B. Feature based segmentation To enlarge the feature of CUNK í :P; of pelvis, equation (1) is applied after CUNK í :P; is filtered. The results of this transformation for one participant are shown in Fig.3. Furthermore, to make the segment point easy to detect, we can approximately regard the waveform shown in Fig.4 as the feature (:P; of a single stride. One gait cycle begins with the heel contact with one foot and ends with the heel contract of the same foot. In this paper, we use the right foot. The gait cycle can also be divided into two phases, the stance phase and the swing phase. The cycle samples of the hip in Fig.3 are manually extracted based on the ground truth of the right heel contacting the ground. Thus in Fig.4, the first negative peak P1 represents the beginning of the stance phase of the right foot with the heel contact of the /13/$ IEEE 221
3 /13/$ IEEE 222
4 V. TRAINING AND CLASSIFICATION In order to test if the proposed asymmetry-based features work for human identification, a simple classifier is used. In this paper, a simple Bayes based Gaussian classifier is used for training and classification. Compared to using Hidden Markov Models for gait recognition, our approach is computionally lighter, hence, faster. To hold all features, all the componants of I Ü are used for computation without any dimensionality reduction. According to Bayes rule, the class Y to be identified from the maximum posterior probability of Y given by the test data X can be transformed from (3) to (4). Y(X)=argmaxP:;:; (3) Y(X)= argmax [P::;;P(;)] (4) To ensure that the prior probability is uniform, one sample is left out from every labeled class in the same order during leave-one-out cross validation. Therefore, (4) can be simplified to (5) and (6). (E =1~total number of classes). Y(X)= argmax [P::; Ü ;] (5) 2::; Ü ;L)=QOOE=J::áä Ü áê Ü ; (6) VI. EXPERIMENT To validate the proposed approach, a human gait database was collected. This experiment was conducted at the University of Waterloo. 20 participants (12 males and 8 females) were asked to walk on a straight route and two different curved routes, while wearing IMUs. 3DUWLFLSDQWV demographic information is summarized in Table I. The experiment was approved by the University of Waterloo Research Ethics Board, and signed consent was obtained from all participants. TABLE I. PARTICIPANTS DEMOGRAPHIC INFORMATION. Age Height[cm] Weight[kg] Ä Ë The data collection was carried out with the Shimmer IMU, a small wearable wireless inertial measurement sensor device [24]. It collects linear acceleration and angular velocity and transmits this information via Bluetooth to a nearby computer. In this experiment, the sampling frequency was set to 128Hz. Three IMUs were used in this experiment. One is attached to the pelvis (forward centered); this sensor was used for both single stride segmentation and human identification, the second is attached to the right ankle and only used to provide the ground truth for the validation of single stride segmentation during walking, since the z-component of acceleration shows a spike due to impact when the right foot contacts the ground. The third sensor is attached to the thorax but it was not used in this paper. A. Straight route 10 rounds of walking on a straight route (approximately 12m distance) at different speeds were collected from each participant: normal, slow and fast. Participants were asked to walk in the order of normal, slow, fast in each round, wearing the 3 IMUs. Thus in total 30 trials were recorded from each participant. Considering the fact that walking speed is related to the personality of the individual, we did not give any H[SOLFLWJXLGHOLQHVRQKRZIDVWLVµIDVWDQGKRZVORZLVVORZ and thus the speed of the gait is based on the individual. Additionally, before each round the placement of the IMU on the trunk was altered by asking the participant to move the belt, in order to exclude the possibility that persons are identified based on the sensor placement. B. Curved route Candidates were asked to walk both clockwise and counter-clockwise on circles of two different sizes. One is a bigger circle (r=3.7m) and the other a smaller circle (r=1.7m). Thus in total 4 trials of curved route walking were recorded per candidate. In summary, there are 30 trials per subject under the condition of straight route walking and 4 trials per subject under the condition of curved route walking. 5 continuous single strides were extracted from the middle of each trial via the segmentation algorithm described in Section II; the number of samples that can be used for validation is shown in Table II. Since we only use the data recorded by the unit attached on the pelvis, 6-dimensional time series data consisting of the 3 dimensions of linear velocity and 3 dimensions of acceleration are contained in each sample. Hence, in equation (2), M Ü >G?Ð :. TABLE II. Route SUMMARY OF THE NUMBER OF SAMPLES PER SUBJECT. straight Condition normal slow fast Trial Stride Total 150 Route curved Small counter small counter small big big clockwise counter clockwise Trial Stride Total 20 VII. EXPERIMENTAL RESULTS AND VALIDATION When the feature based segmentation algorithm is applied to our database, the thresholds set in the feature-based segmentation algorithm are the same for every speed and participant. The feature based segmentation algorithm is applied to all trials collected in our experiment and the parameter values used are shown in Table III. The segmentation results from Participant 1 (P1) are shown in Fig.5 as an example. The red lines are the ground truth obtained from the unit attached at the ankle, and the black lines are the segment points obtained from the feature based algorithm described above. TABLE III. THRESHOLD USED IN SEGMETATION. Threshold T1 T2 T3 T4 M1 Value Threshold M2 M3 M4 M5 M6 Value /13/$ IEEE 223
5 /13/$ IEEE 224
6 x We find a significant dimension (CUNK í :P; in this paper) for feature-based segmentation. Identification is based on the observation of a single stride (one left and one right step) after segmentation. This makes it possible to identify people online by giving the identification result right after a single stride. In addition, a voting algorithm can be applied with our approach by identifying people from three or more strides instead of one stride to enhance the robustness. x Robustness of the approach is tested under different speed conditions and sensor placements. Additionally, we investigate whether walking in a curved line has an effect on the identification process. Future tasks include optimizing the thresholds in the segmentation algorithm automatically based on the walking speed and finding new features of gait that are robust to path curvature and comparing the proposed approach with other existing approaches. REFERENCES [1] '*DIXURY³$VXUYH\RIELRPHWULFJDLWUHFRJQLWLRQ$SSURDFKHV VHFXULW\ DQG FKDOOHQJHV LQ 3URFHHGLQJV of Annual Norwegian Computer Science Conference, [2] D. Gafurov, E. Snekkenes, and P. Bours. Spoof attacks on gait. IEEE Transactions on Information Forensics and Security,Special Issue on Human Detection and Recognition, [3] D. Gafurov. Security analysis of impostor attempts with respect to gender in gait biometrics. In Biometrics: Theory, Applications, and Systems, First IEEE International Conference on, [4] D. Gafurov and P. Bours. Improved hip based individual recognition using wearable motion recording sensor. In Security Technology, Disaster Recovery and Business Continuity, volume 122 of Communications in Computer and Information Science, pages 179±186. Springer Berlin Heidelberg, [5] M. O. Derawi, P. Bours, and K. Holien. Improved cycle detection for accelerometer based gait authentication. In Intelligent Information Hiding and Multimedia Signal Processing (IIH-MSP), Sixth International Conference on, [6] T. Kobayashi, K. Hasida, and N. Otsu. Rotation invariant feature extraction from 3-d acceleration signals. In International Conference on Acoustics, Speech, and Signal Processing, pages 3684±3687, [7] M. O. Derawi, C. Nickely, P. Bours, and C. Busch. Unobtrusive user-authentication on mobile phones using biometric gait recognition. In Intelligent Information Hiding and Multimedia Signal Processing (IIH-MSP), 2010 Sixth International Conference on, [8] D. Gafurov, E. Snekkenes, and P. Bours. Gait authentication and identification using wearable accelerometer sensor. In 5th IEEE Workshop on Automatic Identification Advanced Technologies, [9] J. R. Kwapisz, G. M. Weiss, and S. A. Moore. Cell phone based biometric identification. In IEEE Fourth International Conference on Biometrics: Theory, Applications and Systems, [10] H. J. Ailisto, M. Lindholm, J. Mantyjarvi, E. Vildjiounaite, and S. Makela. Identifying people from gait pattern with accelerometers. In Biometric Technology for Human Identification, SPIE, volume 5779, [11] J. Mantyjarvi, M. Lindholm, E. Vildjiounaite, S.-M. Makela, and H. Ailisto. Identifying users of portable devices from gait pattern with accelerometers. In Proc. of IEEE International Conference on Acoustics, Speech, and Signal Processing, [12] L. Rong, Z. Jianzhong, L. Ming, and H. Xiangfeng. A wearable acceleration sensor system for gait recognition. In 2nd IEEE Conference on Industrial Electronics and Applications, pages 2654± 2659, [13] N. Trung, Y. Makihara, H. Nagahara, R. Sagawa, Y. Mukaigawa, and Y. Yagi. Phase registration in a gallery improving gait authentication. In the International Joint Conference on Biometrics (IJCB2011). IEEE and IAPR, [14] E. Vildjiounaite, S.-M. Makela, M. Lindholm, R. Riihimaki, V. Kyllonen, J. Mantyjarvi, and H. Ailisto. Unobtrusive multimodal biometrics for ensuring privacy and information security with personal devices. In Pervasive Computing, 4th International Conference, PERVASIVE, pages 187±201, [15] L. Rong, D. Zhiguo, Z. Jianzhong, and L. Ming. Identification of individual walking patterns using gait acceleration.in The 1st International Conference on Bioinformatics and Biomedical Engineering, pages 543±546, [16] T. Zhang, G. Venture, Individual Recognition from Gait using Feature Value Method, Cybernectics and Information Technology, Vol. 12, No 3, pages 86-95, [17] B. Huang, M. Chen, P. Huang, and Y. Xu. Gait modeling for human identification. In IEEE International Conference on Robotics and Automation, [18] N. Trung, Y. Makihara, H. Nagahara, Y. Mukaigawa, and Y. Yagi. ³Performance Evaluation of Gait Recognition using the Largest Inertial Sensor-based Gait Database, Proc. of the 5th IAPR Int. Conf. on Biometrics, Paper ID 182, pp. 1-7, New Delhi, India, Mar., [19] M. Karg, K. Kühnlenz, M. Buss, Recognition of Affect Based on Gait Patterns, IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 40 (2010), no. 4, pages [20] B. Gelder.Towards the neurobiology of emotional body language. Journal of Nature reviews, Neuroscience, vol. 7, pages 242±249, March2006. [21] C.Roether, L.Omlor, A. Christensen, and M.Giese, ³&ULWLFDOIHDWXUHV for the perception of emotion from gait, Journal of Vision, vol.9.no.6, pages 1-32, [22] Sadeghi H. Local or global asymmetry in gait of people without impairments. Gait Posture 2003; 17(3): pages 197±204. [23] Seeley MK, Umberger BR, Clasey JL & Shapiro R. The relation between mild leg-length inequality and able-bodied gait asymmetry. Journal of Sports Science and Medicine 9, pages , [24] Kaufman, K.R., Miller, L.S. and Sutherland, D.H. Gait asymmetry in patients with limb-length inequality. Journal of Pediatric Orthopaedics, 16(2), pages , (1996) [25] $%XUQV%5*UHHQH0-0F*UDWK7-2 6KHD%.XULV60 Ayer, F. Stroiescu, and V. Cionca. Shimmer: A wireless sensor platform for noninvasive biomedical research. IEEE Sensors Journal, 10:1527±1534, [26] S. Sarkar, P. J. Phillips, Z, Liu, I. R. Vega, P. Grother, and K. W. Bowyer, " The HumanID Gait Challenge Problem: Data Sets, Performance, and Analysis." IEEE Trans. on Pattern Analysis and Machine Intelligence, pp , Vol.27, No.2, [27] 1 %RXOJRXULV ' +DW]LQDNRV DQG.1 3ODWDQLRWLV ³*DLW Recognition: A challenging signal processing technology for biometric LGHQWLILFDWLRQ IEEE Signal Processing Magazine, p.78-90, Vol, 22, No.6, [28] K. Frank, M. Nadales, P. Robertson and M. Angermann. "Reliable real-time recognition of motion related human activities using MEMS inertial sensors." Proc. of the 23rd Int. Technical Meeting of the Satellite Division of the Institute of Navigation, [29] C. Strohrmann,; H Harms, C. Setz, and G. 7U VWHU³Monitoring Kinematic Changes with Fatigue in Running Using Body-Worn Sensors IEEE Transactions on Information Technology in Biomedicine, IEEE, pp Vol. 16, [30] D. GafurovDQG(6QHNNHQHV³7RZDUGVXQGHUVWDQGLQJWKHXQLTXHQHVV RIJDLWELRPHWULF 8 th IEEE Int. Conf. on Automatic Face & Gesture Recognition,,pp. 1-8, /13/$ IEEE 225
Gait Recognition Using Encodings With Flexible Similarity Measures
 Gait Recognition Using Encodings With Flexible Similarity Measures Michael B. Crouse Kevin Chen H. T. Kung School of Engineering and Applied Sciences Harvard University Abstract Gait signals detectable
Gait Recognition Using Encodings With Flexible Similarity Measures Michael B. Crouse Kevin Chen H. T. Kung School of Engineering and Applied Sciences Harvard University Abstract Gait signals detectable
Gait Based Personal Identification System Using Rotation Sensor
 Gait Based Personal Identification System Using Rotation Sensor Soumik Mondal, Anup Nandy, Pavan Chakraborty, G. C. Nandi Robotics & AI Lab, Indian Institute of Information Technology Allahabad, India
Gait Based Personal Identification System Using Rotation Sensor Soumik Mondal, Anup Nandy, Pavan Chakraborty, G. C. Nandi Robotics & AI Lab, Indian Institute of Information Technology Allahabad, India
Arm Swing as a Weak Biometric for Unobtrusive User Authentication
 International Conference on Intelligent Information Hiding and Multimedia Signal Processing Arm Swing as a Weak Biometric for Unobtrusive User Authentication Davrondzhon Gafurov and Einar Snekkenes Norwegian
International Conference on Intelligent Information Hiding and Multimedia Signal Processing Arm Swing as a Weak Biometric for Unobtrusive User Authentication Davrondzhon Gafurov and Einar Snekkenes Norwegian
Gait Recognition. Yu Liu and Abhishek Verma CONTENTS 16.1 DATASETS Datasets Conclusion 342 References 343
 Chapter 16 Gait Recognition Yu Liu and Abhishek Verma CONTENTS 16.1 Datasets 337 16.2 Conclusion 342 References 343 16.1 DATASETS Gait analysis databases are used in a myriad of fields that include human
Chapter 16 Gait Recognition Yu Liu and Abhishek Verma CONTENTS 16.1 Datasets 337 16.2 Conclusion 342 References 343 16.1 DATASETS Gait analysis databases are used in a myriad of fields that include human
A Bag-of-Gait Model for Gait Recognition
 A Bag-of-Gait Model for Gait Recognition Jianzhao Qin, T. Luo, W. Shao, R. H. Y. Chung and K. P. Chow The Department of Computer Science, The University of Hong Kong, Hong Kong, China Abstract In this
A Bag-of-Gait Model for Gait Recognition Jianzhao Qin, T. Luo, W. Shao, R. H. Y. Chung and K. P. Chow The Department of Computer Science, The University of Hong Kong, Hong Kong, China Abstract In this
User Activity Related Data Sets for Context Recognition
 User Activity Related Data Sets for Context Recognition Holger Junker 1, Paul Lukowicz 1,2, Gerhard Tröster 1 1 Wearable Computing Lab, ETH Zurich, Switzerland 2 Institute for Computer Systems and Networks,
User Activity Related Data Sets for Context Recognition Holger Junker 1, Paul Lukowicz 1,2, Gerhard Tröster 1 1 Wearable Computing Lab, ETH Zurich, Switzerland 2 Institute for Computer Systems and Networks,
A Survey of Biometric Gait Recognition: Approaches, Security and Challenges. Davrondzhon Gafurov Gjøvik University College
 A Survey of Biometric Gait Recognition: Approaches, Security and Challenges Davrondzhon Gafurov Gjøvik University College davrondzhon.gafurov@hig.no Abstract Biometric systems are becoming increasingly
A Survey of Biometric Gait Recognition: Approaches, Security and Challenges Davrondzhon Gafurov Gjøvik University College davrondzhon.gafurov@hig.no Abstract Biometric systems are becoming increasingly
Use of On-Body Sensors to Support Elite Sprint Coaching
 Use of On-Body Sensors to Support Elite Sprint Coaching Kuntze, G. 1, Pias, M.R. 2, Bezodis, I.N. 1, Kerwin, D.G. 1, Coulouris, G. 2 and Irwin, G. 1 Cardiff School of Sport, University of Wales Institute,
Use of On-Body Sensors to Support Elite Sprint Coaching Kuntze, G. 1, Pias, M.R. 2, Bezodis, I.N. 1, Kerwin, D.G. 1, Coulouris, G. 2 and Irwin, G. 1 Cardiff School of Sport, University of Wales Institute,
Development of Wearable Sensor Combinations for Human Lower Extremity Motion Analysis
 Proceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 2006 Development of Wearable Sensor Combinations for Human Lower Extremity Motion Analysis Tao Liu,
Proceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 2006 Development of Wearable Sensor Combinations for Human Lower Extremity Motion Analysis Tao Liu,
Reliable Real-Time Recognition of Motion Related Human Activities using MEMS Inertial Sensors
 Reliable Real-Time Recognition of Motion Related Human Activities using MEMS Inertial Sensors K. Frank,, y; M.J. Vera-Nadales, University of Malaga, Spain; P. Robertson, M. Angermann, v36 Motivation 2
Reliable Real-Time Recognition of Motion Related Human Activities using MEMS Inertial Sensors K. Frank,, y; M.J. Vera-Nadales, University of Malaga, Spain; P. Robertson, M. Angermann, v36 Motivation 2
Gait Analysis of Gender and Age Using a Large-Scale Multi-View Gait Database
 Gait Analysis of Gender and Age Using a Large-Scale Multi-View Gait Database Yasushi Makihara, Hidetoshi Mannami, and Yasushi Yagi Osaka University, 8-1 Mihogaoka, Ibaraki, Osaka, 567-0047, Japan Abstract.
Gait Analysis of Gender and Age Using a Large-Scale Multi-View Gait Database Yasushi Makihara, Hidetoshi Mannami, and Yasushi Yagi Osaka University, 8-1 Mihogaoka, Ibaraki, Osaka, 567-0047, Japan Abstract.
Ambulatory monitoring of gait quality with wearable inertial sensors
 Ambulatory monitoring of gait quality with wearable inertial sensors Dr. Philippe Terrier, PhD June 2016 Summary 1. Why? Reasons for measuring gait in real life conditions 2. What? Real-life assessment
Ambulatory monitoring of gait quality with wearable inertial sensors Dr. Philippe Terrier, PhD June 2016 Summary 1. Why? Reasons for measuring gait in real life conditions 2. What? Real-life assessment
Movement-Type Classification Using Acceleration Sensor
 Movement-Type Classification Using Acceleration Sensor Chu-Hui Lee and Jyun-Han Liou Abstract The most common moving processes include walking, running, going up stairs, and going down stairs. People distinguish
Movement-Type Classification Using Acceleration Sensor Chu-Hui Lee and Jyun-Han Liou Abstract The most common moving processes include walking, running, going up stairs, and going down stairs. People distinguish
Posture influences ground reaction force: implications for crouch gait
 University of Tennessee, Knoxville From the SelectedWorks of Jeffrey A. Reinbolt July 14, 2010 Posture influences ground reaction force: implications for crouch gait H. X. Hoang Jeffrey A. Reinbolt, University
University of Tennessee, Knoxville From the SelectedWorks of Jeffrey A. Reinbolt July 14, 2010 Posture influences ground reaction force: implications for crouch gait H. X. Hoang Jeffrey A. Reinbolt, University
Bicycle Safety Map System Based on Smartphone Aided Sensor Network
 , pp.38-43 http://dx.doi.org/10.14257/astl.2013.42.09 Bicycle Safety Map System Based on Smartphone Aided Sensor Network Dongwook Lee 1, Minsoo Hahn 1 1 Digital Media Lab., Korea Advanced Institute of
, pp.38-43 http://dx.doi.org/10.14257/astl.2013.42.09 Bicycle Safety Map System Based on Smartphone Aided Sensor Network Dongwook Lee 1, Minsoo Hahn 1 1 Digital Media Lab., Korea Advanced Institute of
Mobility Lab provides sensitive, valid and reliable outcome measures.
 Mobility Lab provides sensitive, valid and reliable outcome measures. ith hundreds of universities and hospitals using this system worldwide, Mobility Lab is the most trusted wearable gait and balance
Mobility Lab provides sensitive, valid and reliable outcome measures. ith hundreds of universities and hospitals using this system worldwide, Mobility Lab is the most trusted wearable gait and balance
Gjøvik University College
 Gjøvik University College HiGIA the open research archive for Gjøvik University College Authors: Davrondzhon Gafurov, Einar Snekkenes Title: Gait Recognition Using Wearable Motion Recording Sensors Journal:
Gjøvik University College HiGIA the open research archive for Gjøvik University College Authors: Davrondzhon Gafurov, Einar Snekkenes Title: Gait Recognition Using Wearable Motion Recording Sensors Journal:
Jogging and Walking Analysis Using Wearable Sensors *
 Engineering, 2013, 5, 20-24 doi:10.4236/eng.2013.55b005 Published Online May 2013 (http://www.scirp.org/journal/eng) Jogging and Walking Analysis Using Wearable Sensors * Ching ee ong, Rubita Sudirman,
Engineering, 2013, 5, 20-24 doi:10.4236/eng.2013.55b005 Published Online May 2013 (http://www.scirp.org/journal/eng) Jogging and Walking Analysis Using Wearable Sensors * Ching ee ong, Rubita Sudirman,
Geometric moments for gait description
 Geometric moments for gait description C. Toxqui-Quitl, V. Morales-Batalla, A. Padilla-Vivanco, and C. Camacho-Bello. Universidad Politécnica de Tulancingo, Ingenierías 100, 43629 Hidalgo, México. ctoxqui@upt.edu.mx
Geometric moments for gait description C. Toxqui-Quitl, V. Morales-Batalla, A. Padilla-Vivanco, and C. Camacho-Bello. Universidad Politécnica de Tulancingo, Ingenierías 100, 43629 Hidalgo, México. ctoxqui@upt.edu.mx
Coaching the Triple Jump Boo Schexnayder
 I. Understanding the Event A. The Run and Its Purpose B. Hip Undulation and the Phases C. Making the Connection II. III. IV. The Approach Run A. Phases B. Technical Features 1. Posture 2. Progressive Body
I. Understanding the Event A. The Run and Its Purpose B. Hip Undulation and the Phases C. Making the Connection II. III. IV. The Approach Run A. Phases B. Technical Features 1. Posture 2. Progressive Body
Novel Technique for Gait Analysis Using Two Waist Mounted Gyroscopes
 Old Dominion University ODU Digital Commons Computer Science Theses & Dissertations Computer Science Summer 2018 Novel Technique for Gait Analysis Using Two Waist Mounted Gyroscopes Ahmed Nasr Old Dominion
Old Dominion University ODU Digital Commons Computer Science Theses & Dissertations Computer Science Summer 2018 Novel Technique for Gait Analysis Using Two Waist Mounted Gyroscopes Ahmed Nasr Old Dominion
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system
 An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
Walk the Walk: Attacking Gait Biometrics by Imitation
 Walk the Walk: Attacking Gait Biometrics by Imitation Bendik B. Mjaaland 1, Patrick Bours 2, and Danilo Gligoroski 3 1 Accenture Technology Consulting - Security, Norway, bendik.mjaaland@accenture.com,
Walk the Walk: Attacking Gait Biometrics by Imitation Bendik B. Mjaaland 1, Patrick Bours 2, and Danilo Gligoroski 3 1 Accenture Technology Consulting - Security, Norway, bendik.mjaaland@accenture.com,
Fall Prevention Midterm Report. Akram Alsamarae Lindsay Petku 03/09/2014 Dr. Mansoor Nasir
 Fall Prevention Midterm Report Akram Alsamarae Lindsay Petku 03/09/2014 Dr. Mansoor Nasir Updates to timeline Last semester we created a timeline that included important milestones. We have narrowed down
Fall Prevention Midterm Report Akram Alsamarae Lindsay Petku 03/09/2014 Dr. Mansoor Nasir Updates to timeline Last semester we created a timeline that included important milestones. We have narrowed down
Ecole doctorale SMAER Sciences Mécaniques, Acoustique, Electronique, Robotique
 Thesis subject 2017 Laboratory : Institut des Systèmes Intelligents et de Robotiques (ISIR) CNRS UMR 7222 University: Université Pierre et Marie Curie Title of the thesis: Development of a Body-Machine-Interface
Thesis subject 2017 Laboratory : Institut des Systèmes Intelligents et de Robotiques (ISIR) CNRS UMR 7222 University: Université Pierre et Marie Curie Title of the thesis: Development of a Body-Machine-Interface
Heart Rate Prediction Based on Cycling Cadence Using Feedforward Neural Network
 Heart Rate Prediction Based on Cycling Cadence Using Feedforward Neural Network Kusprasapta Mutijarsa School of Electrical Engineering and Information Technology Bandung Institute of Technology Bandung,
Heart Rate Prediction Based on Cycling Cadence Using Feedforward Neural Network Kusprasapta Mutijarsa School of Electrical Engineering and Information Technology Bandung Institute of Technology Bandung,
Introduction to Pattern Recognition
 Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 12 January 2009 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 12 January 2009 1 / 28 Pattern Recognition By Example Example:
Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 12 January 2009 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 12 January 2009 1 / 28 Pattern Recognition By Example Example:
Step Detection Algorithm For Accurate Distance Estimation Using Dynamic Step Length
 Step Detection Algorithm For Accurate Distance Estimation Using Dynamic Step Length Ahmad Abadleh ahmad_a@mutah.edu.jo Eshraq Al-Hawari eshraqh@mutah.edu.jo Esra'a Alkafaween Esra_ok@mutah.edu.jo Hamad
Step Detection Algorithm For Accurate Distance Estimation Using Dynamic Step Length Ahmad Abadleh ahmad_a@mutah.edu.jo Eshraq Al-Hawari eshraqh@mutah.edu.jo Esra'a Alkafaween Esra_ok@mutah.edu.jo Hamad
Brief Biomechanical Analysis on the Walking of Spinal Cord Injury Patients with a Lower Limb Exoskeleton Robot
 13 IEEE International Conference on Rehabilitation Robotics June 24-26, 13 Seattle, Washington USA Brief Biomechanical Analysis on the Walking of Spinal Cord Injury Patients with a Lower Limb Exoskeleton
13 IEEE International Conference on Rehabilitation Robotics June 24-26, 13 Seattle, Washington USA Brief Biomechanical Analysis on the Walking of Spinal Cord Injury Patients with a Lower Limb Exoskeleton
Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThC9.3 Emergent walking stop using 3-D ZMP modification criteria map for humanoid robot Tomohito Takubo, Takeshi
J. Electrical Systems 11-2 (2015): Regular paper. Abnormal gait detection using Hexagonal method on Model based Front view model
: Regular paper. Abnormal gait detection using Hexagonal method on Model based Front view model") Ahmad Puad Ismail 1,*, Nooritawati Md.Tahir 2, Regular paper Abnormal gait detection using Hexagonal method on Model based Front view model JES Journal of Electrical Systems Gait abnormality recognition
Ahmad Puad Ismail 1,*, Nooritawati Md.Tahir 2, Regular paper Abnormal gait detection using Hexagonal method on Model based Front view model JES Journal of Electrical Systems Gait abnormality recognition
Gait Analysis of a Little Biped Robot. Received May 2015; accepted July 2015
 ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance
 Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
Gait analysis for human identification
 Gait analysis for human identification A. Kale, N. Cuntoor, B. Yegnanarayana, A.N Rajagopalan, and R. Chellappa Center for Automation Research, University of Maryland, College Park, MD 20742 kale, cuntoor,
Gait analysis for human identification A. Kale, N. Cuntoor, B. Yegnanarayana, A.N Rajagopalan, and R. Chellappa Center for Automation Research, University of Maryland, College Park, MD 20742 kale, cuntoor,
Cricket umpire assistance and ball tracking system using a single smartphone camera
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 Cricket umpire assistance and ball tracking system using a single smartphone camera Udit Arora
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 Cricket umpire assistance and ball tracking system using a single smartphone camera Udit Arora
SPRINTING CHARACTERISTICS OF WOMEN S 100 METER FINALS AT THE IAAF WORLD CHAMPIONSHOPS DAEGU 2011
 9:30-9:45 am Sang-Kyoon Park. Sprinting characteristics of women's 100 meter finals at the IAAF world championships Daegu 2011. (228) SPRINTING CHARACTERISTICS OF WOMEN S 100 METER FINALS AT THE IAAF WORLD
9:30-9:45 am Sang-Kyoon Park. Sprinting characteristics of women's 100 meter finals at the IAAF world championships Daegu 2011. (228) SPRINTING CHARACTERISTICS OF WOMEN S 100 METER FINALS AT THE IAAF WORLD
Gait Analysis at Your Fingertips:
 Gait Analysis at Your Fingertips: Enhancing Observational Gait Analysis Using Mobile Device Technology and the Edinburgh Visual Gait Scale Jon R. Davids, MD; Shriners Hospitals for Children Northern California;
Gait Analysis at Your Fingertips: Enhancing Observational Gait Analysis Using Mobile Device Technology and the Edinburgh Visual Gait Scale Jon R. Davids, MD; Shriners Hospitals for Children Northern California;
Accelerometers: An Underutilized Resource in Sports Monitoring
 Accelerometers: An Underutilized Resource in Sports Monitoring Author Neville, Jono, Wixted, Andrew, Rowlands, David, James, Daniel Published 2010 Conference Title Proceedings of the 2010 Sixth International
Accelerometers: An Underutilized Resource in Sports Monitoring Author Neville, Jono, Wixted, Andrew, Rowlands, David, James, Daniel Published 2010 Conference Title Proceedings of the 2010 Sixth International
Bayesian Optimized Random Forest for Movement Classification with Smartphones
 Bayesian Optimized Random Forest for Movement Classification with Smartphones 1 2 3 4 Anonymous Author(s) Affiliation Address email 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
Bayesian Optimized Random Forest for Movement Classification with Smartphones 1 2 3 4 Anonymous Author(s) Affiliation Address email 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
Video Based Accurate Step Counting for Treadmills
 Proceedings Video Based Accurate Step Counting for Treadmills Qingkai Zhen, Yongqing Liu, Qi Hu and Qi Chen * Sport Engineering Center, China Institute of Sport Science, Beijing 100061, China; zhenqingkai@ciss.cn
Proceedings Video Based Accurate Step Counting for Treadmills Qingkai Zhen, Yongqing Liu, Qi Hu and Qi Chen * Sport Engineering Center, China Institute of Sport Science, Beijing 100061, China; zhenqingkai@ciss.cn
Performance of Fully Automated 3D Cracking Survey with Pixel Accuracy based on Deep Learning
 Performance of Fully Automated 3D Cracking Survey with Pixel Accuracy based on Deep Learning Kelvin C.P. Wang Oklahoma State University and WayLink Systems Corp. 2017-10-19, Copenhagen, Denmark European
Performance of Fully Automated 3D Cracking Survey with Pixel Accuracy based on Deep Learning Kelvin C.P. Wang Oklahoma State University and WayLink Systems Corp. 2017-10-19, Copenhagen, Denmark European
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Performance and Security Analysis of Gait-based User Authentication
 Performance and Security Analysis of Gait-based User Authentication Doctoral Dissertation by Davrondzhon Gafurov Submitted to the Faculty of Mathematics and Natural Sciences at the University of Oslo in
Performance and Security Analysis of Gait-based User Authentication Doctoral Dissertation by Davrondzhon Gafurov Submitted to the Faculty of Mathematics and Natural Sciences at the University of Oslo in
Prediction of Crossing Driveways of a Distracted Pedestrian from Walking Characteristics
 International Journal of Internet of Things 2018, 7(1): 1-9 DOI: 10.5923/j.ijit.20180701.01 Prediction of Crossing Driveways of a Distracted Pedestrian from Walking Characteristics Hiroki Kitamura 1,*,
International Journal of Internet of Things 2018, 7(1): 1-9 DOI: 10.5923/j.ijit.20180701.01 Prediction of Crossing Driveways of a Distracted Pedestrian from Walking Characteristics Hiroki Kitamura 1,*,
PERCEPTIVE ROBOT MOVING IN 3D WORLD. D.E- Okhotsimsky, A.K. Platonov USSR
 PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
Shoe-shaped Interface for Inducing a Walking Cycle
 Shoe-shaped Interface for Inducing a Walking Cycle Junji Watanabe*, Hideyuki Ando**, Taro Maeda** * Graduate School of Information Science and Technology, The University of Tokyo 7-3-1, Hongo, Bunkyo-ku,
Shoe-shaped Interface for Inducing a Walking Cycle Junji Watanabe*, Hideyuki Ando**, Taro Maeda** * Graduate School of Information Science and Technology, The University of Tokyo 7-3-1, Hongo, Bunkyo-ku,
EXSC 408L Fall '03 Problem Set #2 Linear Motion. Linear Motion
 Problems: 1. Once you have recorded the calibration frame for a data collection, why is it important to make sure the camera does not shut off? hat happens if the camera automatically shuts off after being
Problems: 1. Once you have recorded the calibration frame for a data collection, why is it important to make sure the camera does not shut off? hat happens if the camera automatically shuts off after being
Thursday, Nov 20, pm 2pm EB 3546 DIET MONITORING THROUGH BREATHING SIGNAL ANALYSIS USING WEARABLE SENSORS. Bo Dong. Advisor: Dr.
 Thursday, Nov 20, 2014 12 pm 2pm EB 3546 DIET MONITORING THROUGH BREATHING SIGNAL ANALYSIS USING WEARABLE SENSORS Bo Dong Advisor: Dr. Subir Biswas ABSTRACT This dissertation presents a framework of wearable
Thursday, Nov 20, 2014 12 pm 2pm EB 3546 DIET MONITORING THROUGH BREATHING SIGNAL ANALYSIS USING WEARABLE SENSORS Bo Dong Advisor: Dr. Subir Biswas ABSTRACT This dissertation presents a framework of wearable
Evaluation of Gait Recognition. Synonyms. Definition. A Panoramic View of Performance. Introduction
 Comp. by: BVijayalakshmi Stage: Galleys ChapterID: 0000883562 Date:27/1/09 Time:17:57:10 E Au1 Evaluation of Gait Recognition SUDEEP SARKAR 1,ZONGYI LIU 2 1 Computer Science and Engineering, University
Comp. by: BVijayalakshmi Stage: Galleys ChapterID: 0000883562 Date:27/1/09 Time:17:57:10 E Au1 Evaluation of Gait Recognition SUDEEP SARKAR 1,ZONGYI LIU 2 1 Computer Science and Engineering, University
1. Task Definition. Automated Human Gait Recognition Ifueko Igbinedion, Ysis Tarter CS 229, Fall 2013
 Automated Human Gait Recognition Ifueko Igbinedion, Ysis Tarter CS 229, Fall 2013 1. Task Definition Motivation A reliable way of human identification is in high demand in today s society. There has been
Automated Human Gait Recognition Ifueko Igbinedion, Ysis Tarter CS 229, Fall 2013 1. Task Definition Motivation A reliable way of human identification is in high demand in today s society. There has been
Mutual and asynchronous anticipation and action in sports as globally competitive
 1 Supplementary Materials Mutual and asynchronous anticipation and action in sports as globally competitive and locally coordinative dynamics Keisuke Fujii, Tadao Isaka, Motoki Kouzaki and Yuji Yamamoto.
1 Supplementary Materials Mutual and asynchronous anticipation and action in sports as globally competitive and locally coordinative dynamics Keisuke Fujii, Tadao Isaka, Motoki Kouzaki and Yuji Yamamoto.
An Indoor Positioning Method with MEMS Inertial Sensors
 Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com An Indoor Positioning Method with MEMS Inertial Sensors u LIU, Wen-Ji XIOG Institute of Optical Communication Technology, Chongqing University
Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com An Indoor Positioning Method with MEMS Inertial Sensors u LIU, Wen-Ji XIOG Institute of Optical Communication Technology, Chongqing University
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots
 ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
Person Identification Using Gait
 Person Identification Using Gait A. Hayder, J. Dargham, A. Chekima, and G. M. Ervin Abstract in this paper, Principal Component Analysis (PCA) with and without Radon Transform (RT) are applied for gait
Person Identification Using Gait A. Hayder, J. Dargham, A. Chekima, and G. M. Ervin Abstract in this paper, Principal Component Analysis (PCA) with and without Radon Transform (RT) are applied for gait
Denny Wells, Jacqueline Alderson, Kane Middleton and Cyril Donnelly
 11:45 am-12:00 pm Denny Wells. Assessing the accuracy of inverse kinematics in OpenSim to estimate elbow flexionextension during cricket bowling: Maintaining the rigid linked assumption. (201) ASSESSING
11:45 am-12:00 pm Denny Wells. Assessing the accuracy of inverse kinematics in OpenSim to estimate elbow flexionextension during cricket bowling: Maintaining the rigid linked assumption. (201) ASSESSING
Decentralized Autonomous Control of a Myriapod Locomotion Robot
 Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS
 APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS INTRODUCTION Ken'ichi Egawa, T. Tsuboi, T. Satoh, and M. Miyazaki Graduate School of Human Sciences, Waseda University Three dimensional
APPLICATION OF THREE DIMENSIONAL ACCELEROMETRY TO HUMAN MOTION ANALYSIS INTRODUCTION Ken'ichi Egawa, T. Tsuboi, T. Satoh, and M. Miyazaki Graduate School of Human Sciences, Waseda University Three dimensional
Body Stabilization of PDW toward Humanoid Walking
 Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Using Ground Reaction Forces from Gait Analysis: Body Mass as a Weak Biometric
 Using Ground Reaction Forces from Gait Analysis: Body Mass as a Weak Biometric Jam Jenkins 1, Carla Ellis 2 1 Western Carolina University Department of Math and Computer Science Cullowhee, NC 28723 USA
Using Ground Reaction Forces from Gait Analysis: Body Mass as a Weak Biometric Jam Jenkins 1, Carla Ellis 2 1 Western Carolina University Department of Math and Computer Science Cullowhee, NC 28723 USA
Generation of Robot Motion Based on Measurement of Human Movement. Susumu Sakano 1, Satoru Shoji 1
 Generation of Robot Motion Based on Measurement of Human Movement Susumu Sakano 1, Satoru Shoji 1 1College of Engineering, Nihon University 1 Nakagawara Tokusada Tamura-machi Koriyama 963-8642 Japan Tel;
Generation of Robot Motion Based on Measurement of Human Movement Susumu Sakano 1, Satoru Shoji 1 1College of Engineering, Nihon University 1 Nakagawara Tokusada Tamura-machi Koriyama 963-8642 Japan Tel;
Gait Analyser. Description of Walking Performance
 Gait Analyser Description of Walking Performance This brochure will help you to understand clearly the parameters described in the report of the Gait Analyser, provide you with tips to implement the walking
Gait Analyser Description of Walking Performance This brochure will help you to understand clearly the parameters described in the report of the Gait Analyser, provide you with tips to implement the walking
KINEMATIC ANALYSIS OF SHOT PUT IN ELITE ATHLETES A CASE STUDY
 KINEMATIC ANALYSIS OF SHOT PUT IN ELITE ATHLETES A CASE STUDY Weimin Liu and Mingxuan Wang Jiangsu Research Institute of Sports Science, Nanjing, People's Republic of China This paper presented the application
KINEMATIC ANALYSIS OF SHOT PUT IN ELITE ATHLETES A CASE STUDY Weimin Liu and Mingxuan Wang Jiangsu Research Institute of Sports Science, Nanjing, People's Republic of China This paper presented the application
Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal
 Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal Sérgio Tosi Rodrigues 1, Valéria Duarte Garcia 1,2, Arturo Forner- Cordero
Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal Sérgio Tosi Rodrigues 1, Valéria Duarte Garcia 1,2, Arturo Forner- Cordero
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Expert Systems with Applications
 Expert Systems with Applications 38 (2011) 14550 14554 Contents lists available at ScienceDirect Expert Systems with Applications journal homepage: www.elsevier.com/locate/eswa Gait verification using
Expert Systems with Applications 38 (2011) 14550 14554 Contents lists available at ScienceDirect Expert Systems with Applications journal homepage: www.elsevier.com/locate/eswa Gait verification using
Takashi Watanabe, Hiroki Saito, Eri Koike, and Kazuki Nitta. 1. Introduction
 Computational Intelligence and Neuroscience Volume 211, Article ID 975193, 12 pages doi:1.1155/211/975193 Research Article A Preliminary Test of Measurement of Joint Angles and Stride Length with Wireless
Computational Intelligence and Neuroscience Volume 211, Article ID 975193, 12 pages doi:1.1155/211/975193 Research Article A Preliminary Test of Measurement of Joint Angles and Stride Length with Wireless
The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women
 The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women *Guha Thakurta A, Iqbal R and De A National Institute of Industrial Engineering, Powai, Vihar Lake, Mumbai-400087, India,
The Influence of Load Carrying Modes on Gait variables of Healthy Indian Women *Guha Thakurta A, Iqbal R and De A National Institute of Industrial Engineering, Powai, Vihar Lake, Mumbai-400087, India,
Proposed Paralympic Classification System for Va a Information for National federations and National Paralympic Committees
 Proposed Paralympic Classification System for Va a Information for National federations and National Paralympic Committees Prepared by the research team Johanna Rosén, MSc, PhD student, member Paracanoe
Proposed Paralympic Classification System for Va a Information for National federations and National Paralympic Committees Prepared by the research team Johanna Rosén, MSc, PhD student, member Paracanoe
Disability assessment using visual gait analysis
 Disability assessment using visual gait analysis Sherif El-Sayed Hussein Computer and Systems Department, Mansoura University, Mansoura, Egypt Tel: +2 0122205369 Fax: +2 0502244690 E-mail: sherif_hussein@mans.edu.eg
Disability assessment using visual gait analysis Sherif El-Sayed Hussein Computer and Systems Department, Mansoura University, Mansoura, Egypt Tel: +2 0122205369 Fax: +2 0502244690 E-mail: sherif_hussein@mans.edu.eg
REPRESENTATION OF HUMAN GAIT TRAJECTORY THROUGH TEMPOROSPATIAL IMAGE MODELLING
 REPRESENTATION OF HUMAN GAIT TRAJECTORY THROUGH TEMPOROSPATIAL IMAGE MODELLING Md. Akhtaruzzaman, Amir A. Shafie and Md. Raisuddin Khan Department of Mechatronics Engineering, Kulliyyah of Engineering,
REPRESENTATION OF HUMAN GAIT TRAJECTORY THROUGH TEMPOROSPATIAL IMAGE MODELLING Md. Akhtaruzzaman, Amir A. Shafie and Md. Raisuddin Khan Department of Mechatronics Engineering, Kulliyyah of Engineering,
TEMPORAL ANALYSIS OF THE JAVELIN THROW
 TEMPORAL ANALYSIS OF THE JAVELIN THROW Derek M. Helenbergerl, Michael T. Sanders 2, and Lawrence D. Abraha~n',~ Biomedical Engineering, Intercollegiate Athletics for Men, Kinesiology & Health Education
TEMPORAL ANALYSIS OF THE JAVELIN THROW Derek M. Helenbergerl, Michael T. Sanders 2, and Lawrence D. Abraha~n',~ Biomedical Engineering, Intercollegiate Athletics for Men, Kinesiology & Health Education
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Introduction to Pattern Recognition
 Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 19 January 2011 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 19 January 2011 1 / 32 Examples of Pattern Recognition in
Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 19 January 2011 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 19 January 2011 1 / 32 Examples of Pattern Recognition in
NIH Public Access Author Manuscript Gait Posture. Author manuscript; available in PMC 2009 May 1.
 NIH Public Access Author Manuscript Published in final edited form as: Gait Posture. 2008 May ; 27(4): 710 714. Two simple methods for determining gait events during treadmill and overground walking using
NIH Public Access Author Manuscript Published in final edited form as: Gait Posture. 2008 May ; 27(4): 710 714. Two simple methods for determining gait events during treadmill and overground walking using
In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007.
 Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
Dynamic analysis and motion measurement of ski turns using inertial and force sensors
 Available online at www.sciencedirect.com Procedia Engineering 6 ( 213 ) 355 36 6th Asia-Pacific Conference on Sports Technology Dynamic analysis and motion measurement of ski turns using inertial and
Available online at www.sciencedirect.com Procedia Engineering 6 ( 213 ) 355 36 6th Asia-Pacific Conference on Sports Technology Dynamic analysis and motion measurement of ski turns using inertial and
Acoustic Gait-based Person Identification using Hidden Markov Models
 Acoustic Gait-based Person Identification using Hidden Markov Models Jürgen T. Geiger, Maximilian Kneißl, Björn Schuller 1 and Gerhard Rigoll Institute for Human-Machine Communication, Technische Universität
Acoustic Gait-based Person Identification using Hidden Markov Models Jürgen T. Geiger, Maximilian Kneißl, Björn Schuller 1 and Gerhard Rigoll Institute for Human-Machine Communication, Technische Universität
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Figure 1 betois (bending torsion insole system) system with five measuring points and A/D- converter.
 system with five measuring points and A/D- converter.") Bending and Torsional Moments - A new measuring system for gait analysis Nora Dawin & Annette Kerkhoff & Klaus Peikenkamp, University of Applied Sciences Münster, Germany Abstract The Laboratory of Biomechanics
Bending and Torsional Moments - A new measuring system for gait analysis Nora Dawin & Annette Kerkhoff & Klaus Peikenkamp, University of Applied Sciences Münster, Germany Abstract The Laboratory of Biomechanics
A Three-Dimensional Motion Anlaysis of Horse Rider in Wireless Sensor Network Environments
 A Three-Dimensional Motion Anlaysis of Horse Rider in Wireless Sensor Network Environments Jae-Neung Lee Dept. of Control and Instrumentation Engineering, Chosun University, 375 Seosuk-dong Gwangju, Korea
A Three-Dimensional Motion Anlaysis of Horse Rider in Wireless Sensor Network Environments Jae-Neung Lee Dept. of Control and Instrumentation Engineering, Chosun University, 375 Seosuk-dong Gwangju, Korea
DIFFERENCE BETWEEN TAEKWONDO ROUNDHOUSE KICK EXECUTED BY THE FRONT AND BACK LEG - A BIOMECHANICAL STUDY
 268 Isas 2000! Hong Kong DIFFERENCE BETWEEN TAEKWONDO ROUNDHOUSE KICK EXECUTED BY THE FRONT AND BACK LEG - A BIOMECHANICAL STUDY Pui-Wah Kong, Tze-Chung Luk and Youlian Hong The Chinese University of Hong
268 Isas 2000! Hong Kong DIFFERENCE BETWEEN TAEKWONDO ROUNDHOUSE KICK EXECUTED BY THE FRONT AND BACK LEG - A BIOMECHANICAL STUDY Pui-Wah Kong, Tze-Chung Luk and Youlian Hong The Chinese University of Hong
In addition to reading this assignment, also read Appendices A and B.
 1 Kinematics I Introduction In addition to reading this assignment, also read Appendices A and B. We will be using a motion detector to track the positions of objects with time in several lab exercises
1 Kinematics I Introduction In addition to reading this assignment, also read Appendices A and B. We will be using a motion detector to track the positions of objects with time in several lab exercises
A COMPARISON OF SELECTED BIOMECHANICAL PARAMETERS OF FRONT ROW SPIKE BETWEEN SHORT SET AND HIGH SET BALL
 A COMPARISON OF SELECTED BIOMECHANICAL PARAMETERS OF FRONT ROW SPIKE BETWEEN SHORT SET AND HIGH SET BALL PAPAN MONDAL a AND SUDARSAN BHOWMICK b,* a Assistant Professor, Department of Physical Education,
A COMPARISON OF SELECTED BIOMECHANICAL PARAMETERS OF FRONT ROW SPIKE BETWEEN SHORT SET AND HIGH SET BALL PAPAN MONDAL a AND SUDARSAN BHOWMICK b,* a Assistant Professor, Department of Physical Education,
Journal of Chemical and Pharmaceutical Research, 2016, 8(6): Research Article. Walking Robot Stability Based on Inverted Pendulum Model
: Research Article. Walking Robot Stability Based on Inverted Pendulum Model") Available online www.jocpr.com Journal of Chemical and Pharmaceutical Research, 2016, 8(6):463-467 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Walking Robot Stability Based on Inverted Pendulum
Available online www.jocpr.com Journal of Chemical and Pharmaceutical Research, 2016, 8(6):463-467 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Walking Robot Stability Based on Inverted Pendulum
A New Approach to Modeling Vertical Stiffness in Heel-Toe Distance Runners
 Brigham Young University BYU ScholarsArchive All Faculty Publications 2003-12-01 A New Approach to Modeling Vertical Stiffness in Heel-Toe Distance Runners Iain Hunter iain_hunter@byu.edu Follow this and
Brigham Young University BYU ScholarsArchive All Faculty Publications 2003-12-01 A New Approach to Modeling Vertical Stiffness in Heel-Toe Distance Runners Iain Hunter iain_hunter@byu.edu Follow this and
Artifacts Due to Filtering Mismatch in Drop Landing Moment Data
 Camenga et al. UW-L Journal of Undergraduate Research XVI (213) Artifacts Due to Filtering Mismatch in Drop Landing Moment Data Elizabeth T. Camenga, Casey J. Rutten, Brendan D. Gould, Jillian T. Asmus,
Camenga et al. UW-L Journal of Undergraduate Research XVI (213) Artifacts Due to Filtering Mismatch in Drop Landing Moment Data Elizabeth T. Camenga, Casey J. Rutten, Brendan D. Gould, Jillian T. Asmus,
Influence of Walking Surfaces and Speeds on Accelerometer-Based Gait Recognition
 Influence of Walking Surfaces and Speeds on Accelerometer-Based Gait Recognition Muhammad Muaaz Master s Thesis Degree Project 30 HE Credits Master of Science in Information and Communication Systems Security
Influence of Walking Surfaces and Speeds on Accelerometer-Based Gait Recognition Muhammad Muaaz Master s Thesis Degree Project 30 HE Credits Master of Science in Information and Communication Systems Security
WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS
 WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS Teruaki Ito Institute of Technology and Science University of Tokushima Tokushima, Japan e-mail: ito@me.tokushima-u.ac.jp Abstract Human walking
WALKING MOTION ANALYSIS USING SMALL ACCELERATION SENSORS Teruaki Ito Institute of Technology and Science University of Tokushima Tokushima, Japan e-mail: ito@me.tokushima-u.ac.jp Abstract Human walking
Foot side detection from lower lumbar spine acceleration
 This is an Author's Original Manuscript of an article published by Elsevier in Gait and Posture Published online 6 June 2015 and available at: doi:10.1016/j.gaitpost.2015.05.021 Foot side detection from
This is an Author's Original Manuscript of an article published by Elsevier in Gait and Posture Published online 6 June 2015 and available at: doi:10.1016/j.gaitpost.2015.05.021 Foot side detection from
The Effect of Time on the Performance of Gait Biometrics
 F The Effect of Time on the Performance of Gait Biometrics Darko S. Matovski, Mark S. Nixon, Sasan Mahmoodi, John N. Carter Abstract Many studies have shown that it is possible to recognize people by the
F The Effect of Time on the Performance of Gait Biometrics Darko S. Matovski, Mark S. Nixon, Sasan Mahmoodi, John N. Carter Abstract Many studies have shown that it is possible to recognize people by the
Gait Recognition with Fuzzy Classification Using Shoulder Body Joint
 Gait Recognition with Fuzzy Classification Using Shoulder Body Joint Jyoti Bharti and M. K. Gupta Abstract In this paper, the adopted methodology based on intersection with fuzzy classification. Consider
Gait Recognition with Fuzzy Classification Using Shoulder Body Joint Jyoti Bharti and M. K. Gupta Abstract In this paper, the adopted methodology based on intersection with fuzzy classification. Consider
Simulation analysis of the influence of breathing on the performance in breaststroke
 Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 736 741 9 th Conference of the International Sports Engineering Association (ISEA) Simulation analysis of the influence of breathing
Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 736 741 9 th Conference of the International Sports Engineering Association (ISEA) Simulation analysis of the influence of breathing
Automated analysis of microscopic images of cellular tissues
 Automated analysis of microscopic images of cellular tissues Rutger Slooter December 8, 2017 Master Thesis Applied Mathematics 1 Overview The problem Master Thesis Applied Mathematics 2 Overview The problem
Automated analysis of microscopic images of cellular tissues Rutger Slooter December 8, 2017 Master Thesis Applied Mathematics 1 Overview The problem Master Thesis Applied Mathematics 2 Overview The problem
ASSESMENT Introduction REPORTS Running Reports Walking Reports Written Report
 ASSESMENT REPORTS Introduction Left panel Avatar Playback Right Panel Patient Gait Parameters Report Tab Click on parameter to view avatar at that point in time 2 Introduction Software will compare gait
ASSESMENT REPORTS Introduction Left panel Avatar Playback Right Panel Patient Gait Parameters Report Tab Click on parameter to view avatar at that point in time 2 Introduction Software will compare gait
Human Gait Model for Automatic Extraction and Description for Gait Recognition
 Human Gait Model for Automatic Extraction and Description for Gait Recognition ABSTRACT Ashish Bhangale 1, Navneet Manjhi 2 and Jyoti Bharti 3 1 Research Scholar, CSE Dept. MANIT-Bhopal, India ashishbhangale.info@yahoo.com
Human Gait Model for Automatic Extraction and Description for Gait Recognition ABSTRACT Ashish Bhangale 1, Navneet Manjhi 2 and Jyoti Bharti 3 1 Research Scholar, CSE Dept. MANIT-Bhopal, India ashishbhangale.info@yahoo.com
Designing Diving Beetle Inspired Underwater Robot(D.BeeBot)
") Designing Diving Beetle Inspired Underwater Robot(D.BeeBot) Hee Joong Kim Department of mechatronics engineering Chungnam National University Daejeon, Korea mainkhj@naver.com Jihong Lee Department of mechatronics
Designing Diving Beetle Inspired Underwater Robot(D.BeeBot) Hee Joong Kim Department of mechatronics engineering Chungnam National University Daejeon, Korea mainkhj@naver.com Jihong Lee Department of mechatronics
Improving pedestrian dynamics modelling using fuzzy logic
 Improving pedestrian dynamics modelling using fuzzy logic Phillip Tomé 1, François Bonzon 1, Bertrand Merminod 1, and Kamiar Aminian 2 1 EPFL Geodetic Engineering Lab (TOPO) Station 18 1015 Lausanne Switzerland
Improving pedestrian dynamics modelling using fuzzy logic Phillip Tomé 1, François Bonzon 1, Bertrand Merminod 1, and Kamiar Aminian 2 1 EPFL Geodetic Engineering Lab (TOPO) Station 18 1015 Lausanne Switzerland
Smart shoe-based evaluation of gait phase detection accuracy using body-worn accelerometers
 Paper draft - please export an up-to-date reference from http://www.iet.unipi.it/m.cimino/pub Smart shoe-based evaluation of gait phase detection accuracy using body-worn accelerometers Marco Avvenuti
Paper draft - please export an up-to-date reference from http://www.iet.unipi.it/m.cimino/pub Smart shoe-based evaluation of gait phase detection accuracy using body-worn accelerometers Marco Avvenuti
Stride October 20, 2017
 Preliminary Design Review Stride October 20, 2017 Advisor: ProfessorTessier Hollot 1 Advisor : Professor Group Members Richie Hartnett CSE Jarred Penney EE Advisor Prof. Tessier Joe Menzie CSE Jack Higgins
Preliminary Design Review Stride October 20, 2017 Advisor: ProfessorTessier Hollot 1 Advisor : Professor Group Members Richie Hartnett CSE Jarred Penney EE Advisor Prof. Tessier Joe Menzie CSE Jack Higgins
Smart-Walk: An Intelligent Physiological Monitoring System for Smart Families
 Smart-Walk: An Intelligent Physiological Monitoring System for Smart Families P. Sundaravadivel 1, S. P. Mohanty 2, E. Kougianos 3, V. P. Yanambaka 4, and M. K. Ganapathiraju 5 University of North Texas,
Smart-Walk: An Intelligent Physiological Monitoring System for Smart Families P. Sundaravadivel 1, S. P. Mohanty 2, E. Kougianos 3, V. P. Yanambaka 4, and M. K. Ganapathiraju 5 University of North Texas,