FFI RAPPORT SENSITIVITY OF LYBINS TRANSMISSION LOSS DUE TO VARIATIONS IN SOUND SPEED. HJELMERVIK Karl Thomas FFI/RAPPORT-2006/01356
|
|
|
- Laurence Parker
- 5 years ago
- Views:
Transcription
1 FFI RAPPORT SENSITIVITY OF LYBINS TRANSMISSION LOSS DUE TO VARIATIONS IN SOUND SPEED HJELMERVIK Karl Thomas FFI/RAPPORT-2006/01356
2
3 SENSITIVITY OF LYBINS TRANSMISSION LOSS DUE TO VARIATIONS IN SOUND SPEED HJELMERVIK Karl Thomas FFI/RAPPORT-2006/01356 FORSVARETS FORSKNINGSINSTITUTT Norwegian Defence Research Establishment P O Box 25, NO-2027 Kjeller, Norway
4
5 3 FORSVARETS FORSKNINGSINSTITUTT (FFI) Norwegian Defence Research Establishment UNCLASSIFIED P O BOX 25 SECURITY CLASSIFICATION OF THIS PAGE N KJELLER, NORWAY (when data entered) REPORT DOCUMENTATION PAGE 1) PUBL/REPORT NUMBER 2) SECURITY CLASSIFICATION 3) NUMBER OF FFI/RAPPORT-2006/01356 UNCLASSIFIED PAGES 1a) PROJECT REFERENCE 2a) DECLASSIFICATION/DOWNGRADING SCHEDULE 41 FFI-IV/899/914-4) TITLE SENSITIVITY OF LYBINS TRANSMISSION LOSS DUE TO VARIATIONS IN SOUND SPEED 5) NAMES OF AUTHOR(S) IN FULL (surname first) HJELMERVIK Karl Thomas 6) DISTRIBUTION STATEMENT Approved for public release. Distribution unlimited. (Offentlig tilgjengelig) 7) INDEXING TERMS IN ENGLISH: IN NORWEGIAN: a) Raytrace a) Strålegang b) Sound speed b) Lydhastighet c) Sensitivity-analysis c) Følsomhetsstudie d) Measurements d) Målinger e) Acoustic modelling e) Akustisk modellering THESAURUS REFERENCE: 8) ABSTRACT This study is motivated by the Sea Acceptance Test 2 (SAT2) to be made sometime in The testing of the new Norwegian Frigates sonar system will involve use of the acoustic ray trace model, LYBIN. The study reveals that LYBIN is sensitive to certain types of errors in the sound speed, depending on the depth of the sonar. The modelling of the hull-mounted Spherion sonar is sensitive to changes in the surface sound speed, while the variable-depth CAPTAS sonar is more sensitive to sound speed changes at and close to the sonar depth. Suggested procedures regarding monitoring of the sound speed and the depth of the variable-depth sonar during the SAT2-tests are made. 9) DATE AUTHORIZED BY POSITION This page only Elling Tveit Director of Research ISBN UNCLASSIFIED SECURITY CLASSIFICATION OF THIS PAGE (when data entered)
6
7 5 CONTENTS Page 1 EXCECUTIVE SUMMARY 7 2 INTRODUCTION 8 3 METHODS AND CONCEPTS Ray concepts Methods of comparison 9 4 ENVIRONMENTS Artificial sound speed profiles Constant gradient Surface channel Deep sound channel Measured sound speed profiles Poseidon sea trial, September 2005, CTD-line RESULTS Artificial sound speed profiles Constant gradient Surface channel Deep sound channel Measured sound speed profiles 23 6 CONCLUSION 27 APPENDIX A COMPARISON PLOTS, POSEIDON CTD-LINE 1 29 A.1 Source at 5m depth 29 A.2 Source at 50m depth 33 A.3 Source at 100m depth 37 References 41
8 6
9 7 SENSITIVITY OF LYBINS TRANSMISSION LOSS DUE TO VARIATIONS IN SOUND SPEED 1 EXCECUTIVE SUMMARY The Norwegian Navy is procuring five modern frigates with helicopters. Anti-submarine warfare (ASW) in littoral waters is particularly demanding, - the Fridtjof Nansen-class sonar systems are high-end systems suitable for littoral waters. The Fridtjof Nansen-class frigates are equipped with two different sonars; a hull-mounted sonar and a towed array. During the SAT 2 tests (sea-acceptance tests) the entire frigate system as an ASW platform will be tested. The requirements on the system include minimum detection ranges of defined targets in different environments. The environments are typical for Norwegian waters and different sound speed profiles are used for each season of the year. An acoustical propagation model, LYBIN, is used for the analysis. The inclusion of an acoustic model is important because the specified environments are not easily staged in the real world. The model allows us to transform between the real-world detection range and the detection range in the specified environment. In order to make this transformation a detailed sampling of the real environment is necessary. One of the environmental parameters needed is the sound speed. The sound speed governs the acoustic propagation paths. This report suggests methods of improving the acoustic modelling required for the SAT 2 tests. The objective of this report is to map the effects errors in the measured sound speed has on the modelled sonar performance. The same acoustical propagation model that will be used during the SAT 2 analysis is also used in this study. The study reveals that LYBIN is sensitive to certain types of errors in the sound speed, depending on the depth of the sonar. Errors in the sound speed at the sonar depth reduce the quality of the modelled sonar performance most. A few suggestions on frequency of sound speed measurements and also depth of the variabledepth sonar (CAPTAS) are made for the SAT 2 test. In the case of the hull-mounted Spherion sonar, the near-surface sound speed should be monitored continuously. The variable-depth CAPTAS sonar should not be placed in a deep sound channel unless the channel is closely monitored by frequent sound speed measurements (at least every hour). In any circumstances sound speed measurements should be made regularly from the sonar vessel, at the target position and, if possible somewhere in between.
10 8 2 INTRODUCTION The acoustical ray trace model LYBIN is planned used for evaluation and verification of the sonar system onboard the new Norwegian frigates, during SAT2. The sonars must have a minimum sonar performance according to the specifications, ref (3). These specifications include an ideal environment, which includes an average sound speed profile for each season. However, such sound speed profiles are seldom encountered in real life. Modelling is therefore needed to transform from the real-life case to the ideal case, ref (2) and ref (4). The intent of this report is to study LYBIN s sensitivity to errors in the sound speed profile. Examples include LYBINs transmission loss estimations sensitivity to changes in surface temperature, or the degeneration of a deep sound channel. Such changes may occur either as spatial or temporal variations. Both artificial and real sound speed profiles are assessed. Procedures for monitoring the sound speed during the SAT2-tests are suggested. In ref (5) the sensitivity of the transmission loss due to variations in bottom type was studied. Ref (4) is similar to this work in that it proposes a set of rules for placement of the target according to modelling of the acoustic field using sound speed profiles from different seasons of the year. This report focuses on the sensitivity of the transmission loss due to oceanographic variations only, and therefore touches only parts of what is discussed in ref (4), but more thoroughly. This work is done within the project Nansen-class frigates, evaluation (899) part 1 work package 1 related to sonar performance. 3 METHODS AND CONCEPTS The general method used is running LYBIN with a true sound speed profile and with an errorinduced sound speed profile. The results from the two runs are then compared in plots of the transmission loss and transmission loss difference. 3.1 Ray concepts A few scientific terms used in the discussion are defined in this section. Figure 3.1 illustrates some of the concepts. Ray: A ray is defined as a line following a path perpendicular to the wave front of a wave. Formally, this wave is a particular solution of the Helmholtz-equation (time-independent wave equation) with a source present. Transmission loss: The transmission loss is the intensity of a single point relative that of a point one meter from the source:
 is the intensity at the desired position. Two-ray regions: Two-ray regions are areas where bundles of non-bottom-reflecting rays pass.")
11 9 TL(, r z, φ) 10log Irz (,, φ) = 10 I0 TL(, r z, φ ) is the transmission loss at the desired position. I 0 is the intensity one meter from the source. I (, rzφ, ) is the intensity at the desired position. Two-ray regions: Two-ray regions are areas where bundles of non-bottom-reflecting rays pass. They are typically high-intensity areas, often recognized in transmission loss plots as areas with low transmission loss. Convergence zones: Convergence zones are where bundles of rays in two-ray regions converge often forming a caustic (an area where two adjacent rays cross paths). Shadow zones: Shadow zones are areas where only bottom reflecting rays are present. They are typically recognized by an intricate interference pattern and high transmission loss. Note that since LYBIN is an incoherent model, the interference pattern is not accounted for. However, when modelling the propagation of a broadband signal, this interference pattern is smeared out, and an incoherent transmission loss is a reasonable approximation of the transmission loss. Figure 3.1: Raytrace plot illustrating shadow zones and two-ray regions. 3.2 Methods of comparison In most cases, LYBIN is run for three sonar depths; 5m, 50m and 100m. Two different sets of sonar settings are used. At 5m sonar depth, the settings for the hull-mounted sonar, Spherion
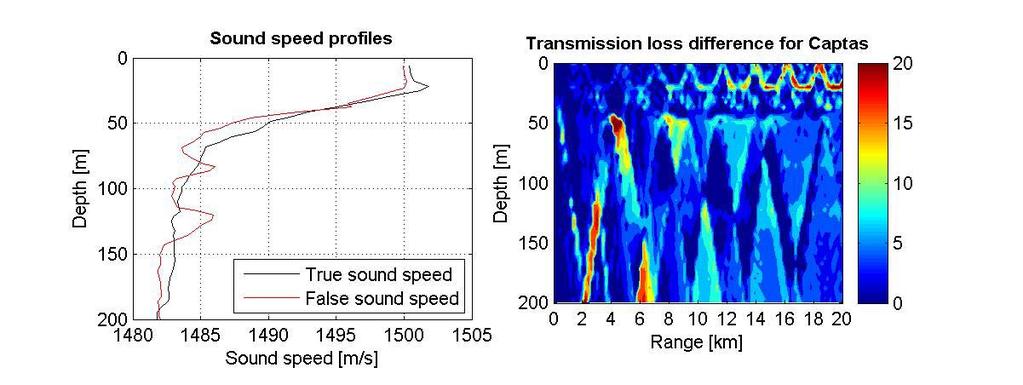
12 10 are used. At 50m and 100m sonar depths, the sonar settings for the CAPTAS variable-depth sonar are used. The one-way transmission loss is modelled, and plotted for two different sound speed profiles. These sound speed profiles are similar in shape and character, but small differences or errors are introduced. The intent is to observe the sensitivity of LYBIN to these changes. One of the sound speed profiles is defined as the true profile, while the other is defined as the false profile (or error-induced profile). The validity of the sound speed profiles is not discussed, just the sensitivity of LYBIN to changes in sound speed. In chapter 4 the sound speed profiles used are presented and discussed. Some of the sound speed profiles are artificial, while others are based on measurements. Figure 3.2 is an example of a figure used in the sensitivity analysis. In the upper left plot, the true and false sound speed profiles are plotted. In this sensitivity analysis we separate between a true sound speed profile, which is the current sound speed profile in the sea, and a false sound speed profile which is different from the current sound speed profile. The two lower plots show the modelled, one-way transmission losses when using the true (left) and false (right) sound speed profiles. The upper right plot is the absolute value of the difference in db of the two sets of modelled transmission losses. Red areas represent areas where the modelled transmission loss is sensitive to the difference in sound speed. The blue areas represent areas where the modelled transmission loss is not sensitive to changes. Figure 3.2: Example of figure used in the sensitivity study.
13 11 4 ENVIRONMENTS Both real and artificial sound speed profiles have been used for this sensitivity analysis. The artificial profiles each reflect nuances of real sound speed profile. The intent is to study errors in each of these nuances by themselves rather than in combination, in order to assess the significance of each type of error. Examples of such nuances are: surface and deep sound channels, and refracting sound speed profiles. All of which are studied in this report. Examples of errors are: depths of sound channels, sound speed gradients of upward or downwards refracting profiles, sound speed minimum in sound channel etc. A selection of these errors is studied. The real sound speed profiles are sets of profiles measured almost simultaneously and in the vicinity of each other. LYBIN should be run with each of the profiles and the results compared in order to find discrepancies and to assess the sensitivity of LYBIN to changes in sound speed. 4.1 Artificial sound speed profiles Three different types of profiles have been constructed. The first is an upward-refracting, constant gradient sound speed profile. The second sound speed profile has a strong surface channel and otherwise an upward-refracting, constant gradient sound speed profile. And the last has a sound channel centred at 100m depth, and a strongly down-refracting upper layer and an upward-refracting lower layer (due to pressure-increase). The types of errors used are as follows: i. Constant shift in the sound speeds vertical gradient, at all depths. ii. Change in minimum sound speed in surface channel. iii. Removal of the deep sound channel (100m depth) Constant gradient Figure 4.1 shows the true and false sound speed profiles using constant gradient. The vertical gradient of the true sound speed profile is 0.015s -1. The false sound speed profile has a vertical gradient of 0.013s -1. This means that the true sound speed profile has a stronger upwardsrefracting effect on the acoustic propagation than the false one.
14 12 Figure 4.1: true and false sound speed profiles using constant gradients Surface channel Two sets of sound speed profiles are presented in this section. The two sets have identical sound speeds below 30m depth, but the surface sound speed and the sound speed gradient within the surface channel varies. In the first example the true surface sound speed is very low, and the false surface sound speed is slightly higher. In this example, the surface sound channel is present both in the true and false sound speed profiles. See Figure 4.2. In the second example the surface sound speed is higher, and the surface sound channel is present in the true sound speed only, not in the false sound speed. See Figure 4.3.
15 13 Figure 4.2: The first set of sound speed profiles with surface channels. Figure 4.3: The second set of sound speed profiles with surface channels.
16 Deep sound channel Figure 4.4shows the true and false sound speed profiles. The true sound speed profile has a significant sound channel centred at 100m depth, while the sound channel is removed in the false sound speed profile. The two sound speed profiles are otherwise identical. It is expected that sources far removed from the sound channel should not be influenced much by the sound channel, but sourced placed within or close to the sound channel will be influenced strongly. Figure 4.4: True and false sound speed profiles with deep sound channel. 4.2 Measured sound speed profiles A single set of measured sound speed profiles are studied. A similar study of a set of sound speed measurements made during the SAT2-tests should be made. Such a study would reveal to what extent spatial or temporal sound speed variation would influence the validity of the acoustic modelling made for the SAT2-tests Poseidon sea trial, September 2005, CTD-line 1 During a sea-trial conducted by the FFI project Poseidon, a series of sound speed profiles were measured along a straight line. Figure 4.5 shows a series of sound speed profiles measured during the trial along a 30km straight line over the course of five hours. The measurements were made at respectively: 02:36, 03:19, 03:57, 04:40, 05:18, 06:08, 06:50 and 07:30 hours. The red sound speed profile was measured at the start of the line. The profiles have all
17 15 the same characteristics; such as a surface channel above a strongly down refracting layer, and finally close to constant sound speed at large depths. In addition some of the profiles have weak deep sound channels at varying depth. Such sound channels are important only if the source or receiver is located within them. Figure 4.5: Measured sound speed profiles along a 30km line. The red sound speed profile was measured at the start of the line. 5 RESULTS In general throughout this chapter, LYBIN has been run with two different sound speed profiles, and the transmission loss results have been compared. The methods of comparison are explained in section 3.1. Generally, we assume that one of the profiles is correct or true, and we seek the error in the transmission loss when using a false sound speed profile. In the case of real measurements, we do not discuss the validity of the sound speed profile, we just define one of the profiles to be true and one to be false. 5.1 Artificial sound speed profiles A few artificial sound speed profiles have been used to illustrate potential errors on a simple level. The sound speed profiles are discussed in section 4.1.

18 Constant gradient Figure 5.1 to Figure 5.3 show the transmission loss and transmission loss difference plots for two LYBIN runs using constant but different sound speed gradients. A hull-mounted sonar at 5m depth is used in the first figure, while a variable-depth sonar at respectively 50m and 100m depth are used in the two subsequent figures. The main discrepancies are along the path of the strongest modes in areas where these modes dominate. Areas where several equally strong modes mix in complex patterns are not sensitive to errors in the sound speed gradient. No discrepancies are seen at short ranges either, since the paths of the propagation modes diverge with increasing range, but are very similar at short ranges regardless of which of the sound speed profiles is used. This is the case for all three source-depths. The long-range discrepancies are largest for deep sources. Figure 5.1: Transmission loss and transmission loss difference plots from LYBIN runs using sound speed profiles with constant but different gradients. Source depth is 5m.

19 17 Figure 5.2: Transmission loss and transmission loss difference plots from LYBIN runs using sound speed profiles with constant but different gradients. Source depth is 50m. Figure 5.3: Transmission loss and transmission loss difference plots from LYBIN runs using sound speed profiles with constant but different gradients. Source depth is 100m.
20 Surface channel Two sets of sound speed profiles are modelled for, presented and discussed. The first set contains a false and a true sound speed profile with different surface sound speeds and gradients but otherwise identical. Both the false and true sound speed profiles have surface channels. In the second example the true sound speed profile has a surface channel, while the false one has too high surface sound speed, and therefore no sound channel. Figure 5.4 and Figure 5.5 show the sound speed profiles, the transmission loss estimate and transmission loss difference for the true and false sound speed in the first example. Since the surface channel is retained, the differences in the transmission loss when using the true and false sound speed profiles are small. This applies both for a deep source (50m) and a shallow source (5m). The exception is that in the deep source case using the true sound speed profile, some rays are caught in the surface layer due to perturbation of ray-paths hitting the surface because of the surface roughness. This does not occur when the surface channel is weakened by the increase of surface sound speed in the false sound speed profile case, causing a discrepancy close to the surface. The effect of ray-angle perturbations in surface reflection is looked into in detail in ref (5). Note that deeper source-depths reduce the discrepancies further, thus deeper sources are less sensitive to changes in surface sound speed. Figure 5.4: Transmission loss and transmission loss difference plots from LYBIN runs using the first set of sound speed profiles with surface channels. Source depth is 5m.
21 19 Figure 5.5: Transmission loss and transmission loss difference plots from LYBIN runs using the first set of sound speed profiles with surface channels. Source depth is 50m. In the second example the surface channel is only present in the true sound speed profile. Figure 5.6 shows that for a shallow source (5m depth), the discrepancy in the transmission loss is significant, especially in the surface layer. When using the true sound speed profile, acoustic energy is caught inside the surface channel and propagates with small propagation loss compared to the bottom-propagating modes escaping the surface channel. The difference in transmission loss in the surface channel therefore increases steadily with range. When using the false sound speed profile, more energy propagates into the depths, resulting in a stronger acoustic field below the sound channel. By using a softer bottom with higher bottom loss, the differences in transmission loss below the surface layer would be less significant since all the modes propagating below the surface channel are bottom interacting. This is due to the high sound speed at the source position. The bottom type used is sand (LYBIN bottom type 2), which has low bottom loss. As expected, Figure 5.7 shows that a deep source is less sensitive to changes in surface sound speed, even if the change in surface sound speed results in the removal of the surface channel.

22 20 Figure 5.6: Transmission loss and transmission loss difference plots from LYBIN runs using the second set of sound speed profiles with surface channels. Source depth is 5m. Figure 5.7: Transmission loss and transmission loss difference plots from LYBIN runs using the second set of sound speed profiles with surface channels. Source depth is 50m.
23 21 All in all, a weakening or strengthening of the surface channel due to changes in the surface temperature, and therefore the surface sound speed, does not influence the predicted transmission loss much. However, if the surface channel vanishes, significant discrepancies are observed if using a hull-mounted sonar, especially in the surface layer. During the SAT2-tests, it is important to measure the surface sound speed continuously when testing the hull-mounted Spherion sonar. However, this is less important when testing the variable-depth CAPTAS sonar, unless the target is at the surface Deep sound channel In this study the true sound speed profile contains a sound channel at 100m depth which is not present in the false sound speed profile. This has little effect on hull-mounted sonars, so the depth-variable sonar, CAPTAS, is modelled for only. Both source depths of 50m and 100m are used. Figure 5.8 shows the transmission loss and transmission loss difference when using the false and true sound speed as shown in the upper right plot. The source is at 50m depth, 50m above the centre axis of the sound channel. For ranges greater than 6km, the difference in transmission loss is mostly insignificant. The exception is due to a change in propagation angle of a bundle of rays leaving the sound channel at approximately 10km range. The change in propagation angle upon leaving the sound channel results in a change in path and therefore a local difference in transmission loss along their path. This is, however not important unless the target happens to be somewhere along the path. This confirms that as long as the source and sonar are placed outside a sound channel, temporal and positional changes in the sound channel do not affect the validity of the transmission loss estimates. This is in accordance with the results in the last section when a surface channel was studied.

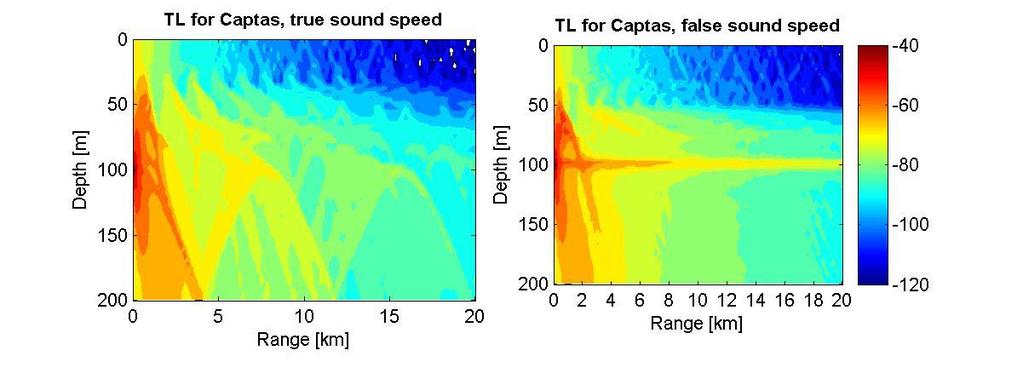
24 22 Figure 5.8: Transmission loss and transmission loss difference plots from LYBIN runs using the artificial sound speed profile with a deep sound channel. Source depth is 50m. Figure 5.9 is identical to Figure 5.8, except that the sonar depth is now 100m, at the centre of the sound channel. It is easily seen that the transmission loss patterns as shown in the two lower plots, are widely different in the two cases. When using the true sound speed profile with a sound channel at 100m depth, a large amount of energy is contained within the sound channel. This is obviously not so when using the false sound speed profile. Furthermore, bundles of rays escaping the sound channel have different propagation angles upon leaving the channel when comparing the two modelling results. This results in local differences in transmission loss, but along many ray paths. The sum of all these differences is significant as can be seen in the upper right plot.

25 23 Figure 5.9: Transmission loss and transmission loss difference plots from LYBIN runs using the artificial sound speed profile with a deep sound channel. Source depth is 100m. 5.2 Measured sound speed profiles The sound speed profiles used in this subsection were obtained during a Poseidon sea-trial in September The series of sound speed measurements made is here called CTD-line 1. More information on the sound speed profiles can be found in section We have defined the first sound speed profile along the line as the true sound speed profile, and all the other sound speed profiles have been compared to the first. The resulting plots can be found in appendix A. A few plots are also presented and discussed in this section. Figure 5.10 shows the one-way, modelled transmission loss using the first and second sound speed profile from CTD-line 1. The source is at 50m depth. The two sound speed profiles are very similar in nature; see the upper left plot in the figure. The measurements were made 43 minutes apart. Both have surface channels down to 20m depth, a strong downward refracting profile between 20m and 80m depth and near constant sound speed at greater depths. Consequently the transmission losses are very similar, see the two lower plots in the figure. However, even though the sound speed profiles are similar, there are locally large discrepancies in the results, as seen in the upper right plot. Especially two particular modes of acoustic propagation give rise to discrepancy. The first mode is caught within the surface

26 24 channel. The second is a bottom-reflecting mode. The discrepancies are due to different gradients in the sound speed. Take for instance the bottom-reflecting mode. The true sound speed profile results in a bottom-reflection every 3.5km, while the other sound speed profile results in approximately 4km between each bottom reflection. Since the modes are displaced, large differences in transmission loss appears along both modes, see the upper right plot. The same applies for the mode caught in the surface channel. It is interesting that there is a propagating mode within the surface channel at all, considering that the source is below the surface channel. According to standard ray theory, the source must be placed within a sound channel in order for the sound channel to trap rays. However, LYBIN includes a randomscattering effect at the surface. This effect may perturb the reflection angle of a ray sufficiently to trap it within the surface channel. This effect is discussed in detail in ref (5). Figure 5.10: Transmission loss and transmission loss difference plots from LYBIN runs using the first (true) and second (false) sound speed profile from CTD-line 1 in the Poseidon sea trial. The source is at 50m depth. Figure 5.11 shows the modelled transmission loss along a horizontal line at 50m depth. The upper turning point of the strong bottom interacting mode is at 50m depth. At the turning point rays converge causing a local minimum in transmission loss, and therefore maximum in acoustic energy. Now consider the SAT2 tests, where a single target is used. The resulting measured echo level is then compared to the modelled echo level as based on e g the false
27 25 sound speed profile here. If the target was placed at 50m depth and 14km range, then the error in the modelled one-way transmission loss approaches 20dB. This underlines the importance of: i) Frequent sound speed measurements both at the sonar vessel, between the sonar vessel and target and at the target position. ii) Varying the range between the sonar vessel and the target in order to measure the transmission loss as a function of range. The idea is to confirm whether the target is within a two-ray region, a shadow zone or in the transition zone in between. Figure 5.11: The modelled transmission loss along a horizontal line at 50m depth for both the true and false sound speed profiles. In the second example the source is at 100m depth. The first measured sound speed profile from CTD-line 1 is still used as the true sound speed profile, while the fourth measured sound speed profile is used as the false one. The sound speed profiles are plotted in the upper right plot in Figure The measurements were made 2h and 4 minutes apart. Notice that the false sound speed profile has a sound channel centred at about 100m depth; the source depth. The transmission loss plot to the lower right shows that a large part of the acoustic energy is contained within the sound channel. This as opposed to the true sound speed where there is no

 and fourth (false) sound speed profile from CTD-line 1 in the Poseidon sea trial.")
28 sound channel at this depth. The error, as shown in the upper right plot, is great within the sound channel and also along the path of a bottom interacting mode present when using the true sound speed profile, but absent when using the false sound speed profile. 26 Figure 5.12: Transmission loss and transmission loss difference plots from LYBIN runs using the first (true) and fourth (false) sound speed profile from CTD-line 1 in the Poseidon sea trial. The source is at 100m depth. Figure 5.13 shows the modelled transmission loss along a horizontal line at 100m depth. The transmission loss when using the false sound speed profile is slowly varying due to the concentrated acoustic energy within the sound channel. The most important propagation modes in the modelling using the true sound speed profile are bottom-reflecting modes. These modes lose more energy with range due to bottom loss, and they also converge at 100m depth, resulting in local maxima every 7km. The differences in transmission loss are large. Remember also that this is one-way transmission loss, two-way transmission obviously doubles the difference. This shows that sound speed profiles with strong sound channels at the source depth should be handled with care. If long-distance propagation is modelled, then perhaps the sound speed profile should be averaged in order to reduce the effect of temporal or local sound channels.
29 27 Figure 5.13: The modelled transmission loss along a horizontal line at 50m depth for both the true and false sound speed profiles. 6 CONCLUSION The LYBIN estimated transmission loss s sensitivity to changes in sound speed has been studied. Three types of artificial sound speed profiles have been analysed; constant gradient profile, surface channel profile and deep channel profile. In addition a few measured sound speed profiles have been analysed. The intent of the study is to give advice on procedures during the SAT2-tests, in order to avoid problems regarding time- or spatial-varying sound speeds. A potential problem in acoustic modelling is failing to predict the transition zones between two-ray regions and shadow-zones. Two-ray regions are areas where there is a large concentration of rays, while shadow-zones are populated by bottom-reflected rays. One should generally avoid placing the target in such a transition zone. This is also according to the advice given in chapter 3 in ref (4). Obviously, shadow zones should also be avoided.
30 28 Even if the modelled transmission loss states that the target is within an area of stable transmission loss, measures should be taken to confirm this using recorded data. When using a single target of insignificant length, no range-variations are recorded in the echo level (and therefore the transmission loss). If the range is varied, a range variable echo level is recorded, and by assessing the variations in echo level one should be able to determine when the target is within a region of stable transmission loss. According to ref (2), the sonar platform should circle around the stationary target in order to accumulate sufficient statistics on the sonars performance. In most cases, if the target is in the transition zone between a shadow zone and two-ray region, the target should drop in and out of the two-ray region even if the range is held constant. This is due to oceanographic variations. This might enable one to identify whether the target is within the shadow zone, two-ray region or in between. Even so, it is recommended that the sonar platform should follow a straight path while pinging before entering and after leaving the circular path around the stationary target. The measured variations in the measured transmission loss at the target should reveal if the target was within a transition zone during the circular path. If the sonar is placed at a depth susceptible to changes in temperature, either due to changing surface-temperature or currents, then frequent bathy-drops should be made, so as to closely monitor the changes in sound speed at relevant depths. This is especially important when testing the hull-mounted Spherion sonar, though monitoring the surface temperature should be sufficient in that case, since the modelled transmission loss for shallow-depth sonars is not sensitive to changes in deep-water sound speed. The temperature should be monitored from the sonar vessel, at the target position, and if possible at a position between the sonar vessel and the target. If a sound speed measurement reveals the presence of a weak and deep sound channel, one should avoid placing the sonar and target at that depth. Such sound channels are prone to vanish after a time or at a distance. They may be temporal due to deep-water currents or similar. If the sonar is placed in such a sound channel anyways, make sure that frequent bathydrops are made, both from the sonar vessel and at the target position. Such a procedure makes it possible to track the changes in the sound channel. Ref (6) contains a sensitivity analysis of the modelled signal excess varying sound speed profiles as well as wind speed and bottom type. It concludes what depths and ranges the test object should be located to avoid the most sensitive areas.
31 29 APPENDIX A COMPARISON PLOTS, POSEIDON CTD-LINE 1 The following sub-appendices contain comparison plots of the modelled transmission loss using the true and false sound speed profiles obtained from CTD-line 1 in the Poseidon trial, see A.1 Source at 5m depth Transmission loss and transmission loss difference plots from LYBIN runs using the first (true) and N th (false) sound speed profile from CTD-line 1 in the Poseidon sea trial. N runs from two to eight in increasing succession for the seven following figures. The source is at 5m depth.
32 30
33 31
34 32
35 33 A.2 Source at 50m depth Transmission loss and transmission loss difference plots from LYBIN runs using the first (true) and N th (false) sound speed profile from CTD-line 1 in the Poseidon sea trial. N runs from two to eight in increasing succession for the seven following figures. The source is at 50m depth.
36 34
37 35
38 36
39 37 A.3 Source at 100m depth Transmission loss and transmission loss difference plots from LYBIN runs using the first (true) and N th (false) sound speed profile from CTD-line 1 in the Poseidon sea trial. N runs from two to eight in increasing succession for the seven following figures. The source is at 100m depth.
40 38
41 39
42 40
43 41 References (1) Såstad Tale S, Hjelmervik Karl Thomas (2005): LYBIN bottom type analysis, 2005, Restricted (2) Dombestein, Elin M (2004): Summary report of the work done in project 795 New Frigates - work package 1.1 Sonar Performance, 2004/03540, Restricted (3) PPG07 Project 6088 New Frigates (2000): SYSTEM SPESIFICATION FOR THE INTEGRATED WEAPON SYSTEM OF THE NEW FRIGATE (NF), NAVMATCOMNOR, P6088-ABD-SS01202 (4) Knudsen Tor, Dombestein Elin M (2004): SAT 2 test object, required target strengths and source levels, 2004/00250, Restricted (5) Tale S Såstad (2004): The effect of surface roughness in LYBIN simulations, 2004/01269, Restricted (6) Hjelmervik Karl Thomas (2006): SAT2 - LYBINs sensitivity to variations in environmental parameters
In ocean evaluation of low frequency active sonar systems
 Acoustics 8 Paris In ocean evaluation of low frequency active sonar systems K.T. Hjelmervik and G.H. Sandsmark FFI, Postboks 5, 39 Horten, Norway kth@ffi.no 2839 Acoustics 8 Paris Sonar performance measurements
Acoustics 8 Paris In ocean evaluation of low frequency active sonar systems K.T. Hjelmervik and G.H. Sandsmark FFI, Postboks 5, 39 Horten, Norway kth@ffi.no 2839 Acoustics 8 Paris Sonar performance measurements
CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY
 CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY JON WEGGE Norwegian Defence Research Establishment (FFI), PO Box 115, NO-3191 Horten, Norway E-mail: jon.wegge@ffi.no False alarms resulting from
CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY JON WEGGE Norwegian Defence Research Establishment (FFI), PO Box 115, NO-3191 Horten, Norway E-mail: jon.wegge@ffi.no False alarms resulting from
Transmission loss (TL) can be predicted, to a very rough degree, solely on the basis of a few factors. These factors are range, and frequency.
 can be predicted, to a very rough degree, solely on the basis of a few factors. These factors are range, and frequency.") Sonar Propagation By virtue of the fact that the speed that acoustic waves travel at depends on the properties of the medium (i.e. sea water), the propagation of sonar will be complicated. So complicated
Sonar Propagation By virtue of the fact that the speed that acoustic waves travel at depends on the properties of the medium (i.e. sea water), the propagation of sonar will be complicated. So complicated
Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling
 Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
Measured broadband reverberation characteristics in Deep Ocean. [E.Mail: ]
![Measured broadband reverberation characteristics in Deep Ocean. [E.Mail: ]](/thumbs/90/101823179.jpg "Measured broadband reverberation characteristics in Deep Ocean. [E.Mail: ]") Measured broadband reverberation characteristics in Deep Ocean Baiju M Nair, M Padmanabham and M P Ajaikumar Naval Physical and Oceanographic Laboratory, Kochi-682 021, India [E.Mail: ] Received ; revised
Measured broadband reverberation characteristics in Deep Ocean Baiju M Nair, M Padmanabham and M P Ajaikumar Naval Physical and Oceanographic Laboratory, Kochi-682 021, India [E.Mail: ] Received ; revised
High-Frequency Scattering from the Sea Surface and Multiple Scattering from Bubbles
 High-Frequency Scattering from the Sea Surface and Multiple Scattering from Bubbles Peter H. Dahl Applied Physics Laboratory College of Ocean and Fisheries Sciences University of Washington Seattle, Washington
High-Frequency Scattering from the Sea Surface and Multiple Scattering from Bubbles Peter H. Dahl Applied Physics Laboratory College of Ocean and Fisheries Sciences University of Washington Seattle, Washington
FFI RAPPORT BROADBAND INVERSION AND SOURCE LOCALIZATION OF VERTICAL ARRAY DATA FROM THE L-ANTENNA EXPERIMENT IN EIDEM Ellen Johanne
 FFI RAPPORT BROADBAND INVERSION AND SOURCE LOCALIZATION OF VERTICAL ARRAY DATA FROM THE L-ANTENNA EXPERIMENT IN 1999 EIDEM Ellen Johanne FFI/RAPPORT-2002/02565 FFIBM/786/115 Approved Horten 28. June 2002
FFI RAPPORT BROADBAND INVERSION AND SOURCE LOCALIZATION OF VERTICAL ARRAY DATA FROM THE L-ANTENNA EXPERIMENT IN 1999 EIDEM Ellen Johanne FFI/RAPPORT-2002/02565 FFIBM/786/115 Approved Horten 28. June 2002
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
EFFECTS OF OCEAN THERMAL STUCTURE ON FISH FINDING WITH SONAR
 FiskDir. Skr. Ser. HavUnders., 15: 202-209. EFFECTS OF OCEAN THERMAL STUCTURE ON FISH FINDING WITH SONAR BY TAIVO LAEVASTU Fleet Numerical Weather Central, Monterey, California THE ACTIVE SONAR FORMULA
FiskDir. Skr. Ser. HavUnders., 15: 202-209. EFFECTS OF OCEAN THERMAL STUCTURE ON FISH FINDING WITH SONAR BY TAIVO LAEVASTU Fleet Numerical Weather Central, Monterey, California THE ACTIVE SONAR FORMULA
TRIAXYS Acoustic Doppler Current Profiler Comparison Study
 TRIAXYS Acoustic Doppler Current Profiler Comparison Study By Randolph Kashino, Axys Technologies Inc. Tony Ethier, Axys Technologies Inc. Reo Phillips, Axys Technologies Inc. February 2 Figure 1. Nortek
TRIAXYS Acoustic Doppler Current Profiler Comparison Study By Randolph Kashino, Axys Technologies Inc. Tony Ethier, Axys Technologies Inc. Reo Phillips, Axys Technologies Inc. February 2 Figure 1. Nortek
WOODFIBRE LNG VESSEL WAKE ASSESSMENT
 Woodfibre LNG Limited WOODFIBRE LNG VESSEL WAKE ASSESSMENT Introduction Woodfibre LNG Limited (WLNG) intends to build a new LNG export terminal at Woodfibre, Howe Sound, British Columbia. WLNG has engaged
Woodfibre LNG Limited WOODFIBRE LNG VESSEL WAKE ASSESSMENT Introduction Woodfibre LNG Limited (WLNG) intends to build a new LNG export terminal at Woodfibre, Howe Sound, British Columbia. WLNG has engaged
APPENDIX 3E HYDROACOUSTIC ANALYSIS OF FISH POPULATIONS IN COPCO AND IRON GATE RESERVOIRS, CALIFORNIA NOVEMBER
 APPENDIX 3E HYDROACOUSTIC ANALYSIS OF FISH POPULATIONS IN COPCO AND IRON GATE RESERVOIRS, CALIFORNIA NOVEMBER 23 February 24 PacifiCorp Fish Resources FTR Appendix 3E.doc Hydroacoustic Analysis of Fish
APPENDIX 3E HYDROACOUSTIC ANALYSIS OF FISH POPULATIONS IN COPCO AND IRON GATE RESERVOIRS, CALIFORNIA NOVEMBER 23 February 24 PacifiCorp Fish Resources FTR Appendix 3E.doc Hydroacoustic Analysis of Fish
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
Currents measurements in the coast of Montevideo, Uruguay
 Currents measurements in the coast of Montevideo, Uruguay M. Fossati, D. Bellón, E. Lorenzo & I. Piedra-Cueva Fluid Mechanics and Environmental Engineering Institute (IMFIA), School of Engineering, Research
Currents measurements in the coast of Montevideo, Uruguay M. Fossati, D. Bellón, E. Lorenzo & I. Piedra-Cueva Fluid Mechanics and Environmental Engineering Institute (IMFIA), School of Engineering, Research
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
DP Ice Model Test of Arctic Drillship
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 211 ICE TESTING SESSION DP Ice Model Test of Arctic Drillship Torbjørn Hals Kongsberg Maritime, Kongsberg, Norway Fredrik
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 211 ICE TESTING SESSION DP Ice Model Test of Arctic Drillship Torbjørn Hals Kongsberg Maritime, Kongsberg, Norway Fredrik
An experimental study of internal wave generation through evanescent regions
 An experimental study of internal wave generation through evanescent regions Allison Lee, Julie Crockett Department of Mechanical Engineering Brigham Young University Abstract Internal waves are a complex
An experimental study of internal wave generation through evanescent regions Allison Lee, Julie Crockett Department of Mechanical Engineering Brigham Young University Abstract Internal waves are a complex
Atmospheric Waves James Cayer, Wesley Rondinelli, Kayla Schuster. Abstract
 Atmospheric Waves James Cayer, Wesley Rondinelli, Kayla Schuster Abstract It is important for meteorologists to have an understanding of the synoptic scale waves that propagate thorough the atmosphere
Atmospheric Waves James Cayer, Wesley Rondinelli, Kayla Schuster Abstract It is important for meteorologists to have an understanding of the synoptic scale waves that propagate thorough the atmosphere
Super-parameterization of boundary layer roll vortices in tropical cyclone models
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Super-parameterization of boundary layer roll vortices in tropical cyclone models PI Isaac Ginis Graduate School of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Super-parameterization of boundary layer roll vortices in tropical cyclone models PI Isaac Ginis Graduate School of Oceanography
E. Agu, M. Kasperski Ruhr-University Bochum Department of Civil and Environmental Engineering Sciences
 EACWE 5 Florence, Italy 19 th 23 rd July 29 Flying Sphere image Museo Ideale L. Da Vinci Chasing gust fronts - wind measurements at the airport Munich, Germany E. Agu, M. Kasperski Ruhr-University Bochum
EACWE 5 Florence, Italy 19 th 23 rd July 29 Flying Sphere image Museo Ideale L. Da Vinci Chasing gust fronts - wind measurements at the airport Munich, Germany E. Agu, M. Kasperski Ruhr-University Bochum
ENVIRONMENTALLY ADAPTIVE SONAR
 ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
Numerical and Experimental Investigation of the Possibility of Forming the Wake Flow of Large Ships by Using the Vortex Generators
 Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 Numerical and Experimental Investigation of the Possibility of Forming the Wake Flow of Large Ships by Using the
Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 Numerical and Experimental Investigation of the Possibility of Forming the Wake Flow of Large Ships by Using the
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
Sea and Land Breezes METR 4433, Mesoscale Meteorology Spring 2006 (some of the material in this section came from ZMAG)
") Sea and Land Breezes METR 4433, Mesoscale Meteorology Spring 2006 (some of the material in this section came from ZMAG) 1 Definitions: The sea breeze is a local, thermally direct circulation arising from
Sea and Land Breezes METR 4433, Mesoscale Meteorology Spring 2006 (some of the material in this section came from ZMAG) 1 Definitions: The sea breeze is a local, thermally direct circulation arising from
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
Gravity waves in stable atmospheric boundary layers
 Gravity waves in stable atmospheric boundary layers Carmen J. Nappo CJN Research Meteorology Knoxville, Tennessee 37919, USA Abstract Gravity waves permeate the stable atmospheric planetary boundary layer,
Gravity waves in stable atmospheric boundary layers Carmen J. Nappo CJN Research Meteorology Knoxville, Tennessee 37919, USA Abstract Gravity waves permeate the stable atmospheric planetary boundary layer,
Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution Joseph D. Warren School of Marine and Atmospheric
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution Joseph D. Warren School of Marine and Atmospheric
Observing the behavioral response of herring exposed to mid-frequency sonar signals
 Observing the behavioral response of herring exposed to mid-frequency sonar signals Handegard 1, Nils Olav and Doksaeter 1, Lise and Godoe 1, Olav Rune and Kvadsheim 2, Petter H. 1 Institute of Marine
Observing the behavioral response of herring exposed to mid-frequency sonar signals Handegard 1, Nils Olav and Doksaeter 1, Lise and Godoe 1, Olav Rune and Kvadsheim 2, Petter H. 1 Institute of Marine
Lecture 8. Sound Waves Superposition and Standing Waves
 Lecture 8 Sound Waves Superposition and Standing Waves Sound Waves Speed of Sound Waves Intensity of Periodic Sound Waves The Doppler Effect Sound Waves are the most common example of longitudinal waves.
Lecture 8 Sound Waves Superposition and Standing Waves Sound Waves Speed of Sound Waves Intensity of Periodic Sound Waves The Doppler Effect Sound Waves are the most common example of longitudinal waves.
Chapter 2. Turbulence and the Planetary Boundary Layer
 Chapter 2. Turbulence and the Planetary Boundary Layer In the chapter we will first have a qualitative overview of the PBL then learn the concept of Reynolds averaging and derive the Reynolds averaged
Chapter 2. Turbulence and the Planetary Boundary Layer In the chapter we will first have a qualitative overview of the PBL then learn the concept of Reynolds averaging and derive the Reynolds averaged
Acoustic Focusing in Shallow Water and Bubble Radiation Effects
 Acoustic Focusing in Shallow Water and Bubble Radiation Effects Grant B. Deane Marine Physical Laboratory, Scripps Institution of Oceanography UCSD, La Jolla, CA 92093-0238 Phone: (858) 534-0536 fax: (858)
Acoustic Focusing in Shallow Water and Bubble Radiation Effects Grant B. Deane Marine Physical Laboratory, Scripps Institution of Oceanography UCSD, La Jolla, CA 92093-0238 Phone: (858) 534-0536 fax: (858)
Lab # 03: Visualization of Shock Waves by using Schlieren Technique
 AerE545 Lab # 03: Visualization of Shock Waves by using Schlieren Technique Objectives: 1. To get hands-on experiences about Schlieren technique for flow visualization. 2. To learn how to do the optics
AerE545 Lab # 03: Visualization of Shock Waves by using Schlieren Technique Objectives: 1. To get hands-on experiences about Schlieren technique for flow visualization. 2. To learn how to do the optics
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS
 INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
Exemplar for Internal Assessment Resource Geography Level 3. Resource title: The Coastal Environment Kaikoura
 Exemplar for internal assessment resource Geography 3.5A for Achievement Standard 91430 Exemplar for Internal Assessment Resource Geography Level 3 Resource title: The Coastal Environment Kaikoura This
Exemplar for internal assessment resource Geography 3.5A for Achievement Standard 91430 Exemplar for Internal Assessment Resource Geography Level 3 Resource title: The Coastal Environment Kaikoura This
Chapter 2 Hydrostatics and Control
 Chapter 2 Hydrostatics and Control Abstract A submarine must conform to Archimedes Principle, which states that a body immersed in a fluid has an upward force on it (buoyancy) equal to the weight of the
Chapter 2 Hydrostatics and Control Abstract A submarine must conform to Archimedes Principle, which states that a body immersed in a fluid has an upward force on it (buoyancy) equal to the weight of the
Unit 7: Waves and Sound
 Objectives Unit 7: Waves and Sound Identify the crest, trough, wavelength, and amplitude of any wave, and distinguish transverse and longitudinal wages. Given two of the following quantities of a wave,
Objectives Unit 7: Waves and Sound Identify the crest, trough, wavelength, and amplitude of any wave, and distinguish transverse and longitudinal wages. Given two of the following quantities of a wave,
Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters Vitalii A. Sheremet, Principal Investigator
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters Vitalii A. Sheremet, Principal Investigator
BLOCKAGE LOCATION THE PULSE METHOD
 BLOCKAGE LOCATION THE PULSE METHOD Presented by John Pitchford Pitchford In-Line Author James Pitchford ABSTRACT Pipeline blockages can result from a number of different mechanisms: wax or solid hydrates
BLOCKAGE LOCATION THE PULSE METHOD Presented by John Pitchford Pitchford In-Line Author James Pitchford ABSTRACT Pipeline blockages can result from a number of different mechanisms: wax or solid hydrates
EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY
 18 th World Conference on Non destructive Testing, 16-20 April 2012, Durban, South Africa EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY Arno VOLKER 1 and Hendrik VOS 1 TNO, Stieltjesweg 1,
18 th World Conference on Non destructive Testing, 16-20 April 2012, Durban, South Africa EXPERIMENTAL RESULTS OF GUIDED WAVE TRAVEL TIME TOMOGRAPHY Arno VOLKER 1 and Hendrik VOS 1 TNO, Stieltjesweg 1,
The Evolution of Vertical Spatial Coherence with Range from Source
 The Evolution of Vertical Spatial Coherence with Range from Source Peter H. Dahl Applied Physics Laboratory and Mechanical Engineering Dept. University of Washington Research sponsored by U.S. Office of
The Evolution of Vertical Spatial Coherence with Range from Source Peter H. Dahl Applied Physics Laboratory and Mechanical Engineering Dept. University of Washington Research sponsored by U.S. Office of
Waves. harmonic wave wave equation one dimensional wave equation principle of wave fronts plane waves law of reflection
 Waves Vocabulary mechanical wave pulse continuous periodic wave amplitude wavelength period frequency wave velocity phase transverse wave longitudinal wave intensity displacement wave number phase velocity
Waves Vocabulary mechanical wave pulse continuous periodic wave amplitude wavelength period frequency wave velocity phase transverse wave longitudinal wave intensity displacement wave number phase velocity
Section 6. The Surface Circulation of the Ocean. What Do You See? Think About It. Investigate. Learning Outcomes
 Chapter 5 Winds, Oceans, Weather, and Climate Section 6 The Surface Circulation of the Ocean What Do You See? Learning Outcomes In this section, you will Understand the general paths of surface ocean currents.
Chapter 5 Winds, Oceans, Weather, and Climate Section 6 The Surface Circulation of the Ocean What Do You See? Learning Outcomes In this section, you will Understand the general paths of surface ocean currents.
from ocean to cloud PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM
 PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
PARAMETRIC SUB-BOTTOM PROFILER, A NEW APPROACH FOR AN OLD PROBLEM Geoff Holland, Alcatel-Lucent Submarine Networks Geoff.holland@alcatel-lucent.com Alcatel-Lucent Submarine Networks Ltd, Christchurch Way,
SCIENTIFIC COMMITTEE SEVENTH REGULAR SESSION August 2011 Pohnpei, Federated States of Micronesia
 SCIENTIFIC COMMITTEE SEVENTH REGULAR SESSION 9-17 August 2011 Pohnpei, Federated States of Micronesia CPUE of skipjack for the Japanese offshore pole and line using GPS and catch data WCPFC-SC7-2011/SA-WP-09
SCIENTIFIC COMMITTEE SEVENTH REGULAR SESSION 9-17 August 2011 Pohnpei, Federated States of Micronesia CPUE of skipjack for the Japanese offshore pole and line using GPS and catch data WCPFC-SC7-2011/SA-WP-09
Wave Motion. interference destructive interferecne constructive interference in phase. out of phase standing wave antinodes resonant frequencies
 Wave Motion Vocabulary mechanical waves pulse continuous periodic wave amplitude period wavelength period wave velocity phase transverse wave longitudinal wave intensity displacement amplitude phase velocity
Wave Motion Vocabulary mechanical waves pulse continuous periodic wave amplitude period wavelength period wave velocity phase transverse wave longitudinal wave intensity displacement amplitude phase velocity
Study of Passing Ship Effects along a Bank by Delft3D-FLOW and XBeach1
 Study of Passing Ship Effects along a Bank by Delft3D-FLOW and XBeach1 Minggui Zhou 1, Dano Roelvink 2,4, Henk Verheij 3,4 and Han Ligteringen 2,3 1 School of Naval Architecture, Ocean and Civil Engineering,
Study of Passing Ship Effects along a Bank by Delft3D-FLOW and XBeach1 Minggui Zhou 1, Dano Roelvink 2,4, Henk Verheij 3,4 and Han Ligteringen 2,3 1 School of Naval Architecture, Ocean and Civil Engineering,
Drift Characteristics of Paroscientific pressure sensors
 Drift Characteristics of Paroscientific pressure sensors by Randolph Watts, Maureen Kennelly, Karen Tracey, and Kathleen Donohue (University of Rhode Island) PIES + current meter & CPIES arrays Paroscientific
Drift Characteristics of Paroscientific pressure sensors by Randolph Watts, Maureen Kennelly, Karen Tracey, and Kathleen Donohue (University of Rhode Island) PIES + current meter & CPIES arrays Paroscientific
The Coriolis force, geostrophy, Rossby waves and the westward intensification
 Chapter 3 The Coriolis force, geostrophy, Rossby waves and the westward intensification The oceanic circulation is the result of a certain balance of forces. Geophysical Fluid Dynamics shows that a very
Chapter 3 The Coriolis force, geostrophy, Rossby waves and the westward intensification The oceanic circulation is the result of a certain balance of forces. Geophysical Fluid Dynamics shows that a very
FFI RAPPORT. THE POTENTIAL IMPACT OF 1-8 khz ACTIVE SONAR ON STOCKS OF JUVENILE FISH DURING SONAR EXERCISES. KVADSHEIM, Petter H, SEVALDSEN, Erik M
 FFI RAPPORT THE POTENTIAL IMPACT OF 1-8 khz ACTIVE SONAR ON STOCKS OF JUVENILE FISH DURING SONAR EXERCISES KVADSHEIM, Petter H, SEVALDSEN, Erik M FFI/RAPPORT-2005/01027 THE POTENTIAL IMPACT OF 1-8 khz
FFI RAPPORT THE POTENTIAL IMPACT OF 1-8 khz ACTIVE SONAR ON STOCKS OF JUVENILE FISH DURING SONAR EXERCISES KVADSHEIM, Petter H, SEVALDSEN, Erik M FFI/RAPPORT-2005/01027 THE POTENTIAL IMPACT OF 1-8 khz
Cost-Effectiveness of CC&D Measures and their Interaction
 Cost-Effectiveness of CC&D Measures and their Interaction Eivind Strømman Forsvarets forskningsinstitutt (Norwegian Defence Research Establishment) PO Box 25, NO-27 Kjeller Norway eivind.stromman@ffi.no
Cost-Effectiveness of CC&D Measures and their Interaction Eivind Strømman Forsvarets forskningsinstitutt (Norwegian Defence Research Establishment) PO Box 25, NO-27 Kjeller Norway eivind.stromman@ffi.no
Seismic Survey Designs for Converted Waves
 Seismic Survey Designs for Converted Waves James A. Musser* GMG/AXIS Inc., Denver, CO 1720 Red Cloud Road, Longmont, CO, 80501, USA jmusser@gmg.com ABSTRACT Designing converted wave 3D surveys is considerably
Seismic Survey Designs for Converted Waves James A. Musser* GMG/AXIS Inc., Denver, CO 1720 Red Cloud Road, Longmont, CO, 80501, USA jmusser@gmg.com ABSTRACT Designing converted wave 3D surveys is considerably
Waves, Bubbles, Noise and Underwater Communications
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Waves, Bubbles, Noise and Underwater Communications Grant B. Deane Marine Physical Laboratory Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Waves, Bubbles, Noise and Underwater Communications Grant B. Deane Marine Physical Laboratory Scripps Institution of Oceanography
Understanding How the Appearance of Optical Fiber Splices Relates to Splice Quality
 Understanding How the Appearance of Optical Fiber Splices Relates to Splice Quality Douglas Duke & David Mansperger Fusion Splicing Systems, AFL, Duncan, SC Doug.Duke@AFLglobal.com David.Mansperger@AFLglobal.com
Understanding How the Appearance of Optical Fiber Splices Relates to Splice Quality Douglas Duke & David Mansperger Fusion Splicing Systems, AFL, Duncan, SC Doug.Duke@AFLglobal.com David.Mansperger@AFLglobal.com
.y..o ~ - \ o ~ ~~~I bl:..ill & ~j.a,_,.,ui J-1 ~4 b~
 Qatar Univ. Sci. J. (1993), 13(2.): 353-357 SEASONAL VARIATIONS OF ACOUSTIC PROPERTIES IN ROPME SEA AREA By A. A. H. EL-GINDY* *Department of Marine Sciences, Faculty of Science, University of Qatar, Doha,
Qatar Univ. Sci. J. (1993), 13(2.): 353-357 SEASONAL VARIATIONS OF ACOUSTIC PROPERTIES IN ROPME SEA AREA By A. A. H. EL-GINDY* *Department of Marine Sciences, Faculty of Science, University of Qatar, Doha,
SAMPLE MAT Proceedings of the 10th International Conference on Stability of Ships
 and Ocean Vehicles 1 Application of Dynamic V-Lines to Naval Vessels Matthew Heywood, BMT Defence Services Ltd, mheywood@bm tdsl.co.uk David Smith, UK Ministry of Defence, DESSESea-ShipStab1@mod.uk ABSTRACT
and Ocean Vehicles 1 Application of Dynamic V-Lines to Naval Vessels Matthew Heywood, BMT Defence Services Ltd, mheywood@bm tdsl.co.uk David Smith, UK Ministry of Defence, DESSESea-ShipStab1@mod.uk ABSTRACT
Planning Daily Work Trip under Congested Abuja Keffi Road Corridor
 ISBN 978-93-84468-19-4 Proceedings of International Conference on Transportation and Civil Engineering (ICTCE'15) London, March 21-22, 2015, pp. 43-47 Planning Daily Work Trip under Congested Abuja Keffi
ISBN 978-93-84468-19-4 Proceedings of International Conference on Transportation and Civil Engineering (ICTCE'15) London, March 21-22, 2015, pp. 43-47 Planning Daily Work Trip under Congested Abuja Keffi
EXPLORING MOTIVATION AND TOURIST TYPOLOGY: THE CASE OF KOREAN GOLF TOURISTS TRAVELLING IN THE ASIA PACIFIC. Jae Hak Kim
 EXPLORING MOTIVATION AND TOURIST TYPOLOGY: THE CASE OF KOREAN GOLF TOURISTS TRAVELLING IN THE ASIA PACIFIC Jae Hak Kim Thesis submitted for the degree of Doctor of Philosophy at the University of Canberra
EXPLORING MOTIVATION AND TOURIST TYPOLOGY: THE CASE OF KOREAN GOLF TOURISTS TRAVELLING IN THE ASIA PACIFIC Jae Hak Kim Thesis submitted for the degree of Doctor of Philosophy at the University of Canberra
Strand E. Waves. Unit 1. Measuring Waves. Text. Types of Wave 2 Measuring Waves 6 Phase 10
 Strand E. Waves Unit 1. Measuring Waves Contents Page Types of Wave 2 Measuring Waves 6 Phase 10 E.1.1 Types of Wave Ripples on a pond, sunlight, musical sounds and earthquakes are all wave phenomena.
Strand E. Waves Unit 1. Measuring Waves Contents Page Types of Wave 2 Measuring Waves 6 Phase 10 E.1.1 Types of Wave Ripples on a pond, sunlight, musical sounds and earthquakes are all wave phenomena.
The below identified patent application is available for licensing. Requests for information should be addressed to:
 DEPARTMENT OF THE NAVY OFFICE OF COUNSEL NAVAL UNDERSEA WARFARE CENTER DIVISION 1176 HOWELL STREET NEWPORT Rl 02841-1708 IN REPLY REFER TO Attorney Docket No. 300170 20 March 2018 The below identified
DEPARTMENT OF THE NAVY OFFICE OF COUNSEL NAVAL UNDERSEA WARFARE CENTER DIVISION 1176 HOWELL STREET NEWPORT Rl 02841-1708 IN REPLY REFER TO Attorney Docket No. 300170 20 March 2018 The below identified
Sound scattering by hydrodynamic wakes of sea animals
 ICES Journal of Marine Science, 53: 377 381. 1996 Sound scattering by hydrodynamic wakes of sea animals Dmitry A. Selivanovsky and Alexander B. Ezersky Selivanovsky, D. A. and Ezersky, A. B. 1996. Sound
ICES Journal of Marine Science, 53: 377 381. 1996 Sound scattering by hydrodynamic wakes of sea animals Dmitry A. Selivanovsky and Alexander B. Ezersky Selivanovsky, D. A. and Ezersky, A. B. 1996. Sound
Air-Sea Interaction Spar Buoy Systems
 DISTRIBUTION STATEMENT A: Distribution approved for public release; distribution is unlimited Air-Sea Interaction Spar Buoy Systems Hans C. Graber CSTARS - University of Miami 11811 SW 168 th Street, Miami,
DISTRIBUTION STATEMENT A: Distribution approved for public release; distribution is unlimited Air-Sea Interaction Spar Buoy Systems Hans C. Graber CSTARS - University of Miami 11811 SW 168 th Street, Miami,
Traveling Waves vs. Standing Waves
 The Physics Classroom» Physics Tutorial» Waves» Traveling Waves vs. Standing Waves Waves - Lesson 4 - Standing Waves Traveling Waves vs. Standing Waves Traveling Waves vs. Standing Waves Formation of Standing
The Physics Classroom» Physics Tutorial» Waves» Traveling Waves vs. Standing Waves Waves - Lesson 4 - Standing Waves Traveling Waves vs. Standing Waves Traveling Waves vs. Standing Waves Formation of Standing
Section 1 Types of Waves. Distinguish between mechanical waves and electromagnetic waves.
 Section 1 Types of Waves Objectives Recognize that waves transfer energy. Distinguish between mechanical waves and electromagnetic waves. Explain the relationship between particle vibration and wave motion.
Section 1 Types of Waves Objectives Recognize that waves transfer energy. Distinguish between mechanical waves and electromagnetic waves. Explain the relationship between particle vibration and wave motion.
Gravity wave effects on the calibration uncertainty of hydrometric current meters
 Gravity wave effects on the calibration uncertainty of hydrometric current meters Marc de Huu and Beat Wüthrich Federal Office of Metrology METAS, Switzerland E-mail: marc.dehuu@metas.ch Abstract Hydrometric
Gravity wave effects on the calibration uncertainty of hydrometric current meters Marc de Huu and Beat Wüthrich Federal Office of Metrology METAS, Switzerland E-mail: marc.dehuu@metas.ch Abstract Hydrometric
ESCI 343 Atmospheric Dynamics II Lesson 10 - Topographic Waves
 ESCI 343 Atmospheric Dynamics II Lesson 10 - Topographic Waves Reference: An Introduction to Dynamic Meteorology (3 rd edition), J.R. Holton Reading: Holton, Section 7.4. STATIONARY WAVES Waves will appear
ESCI 343 Atmospheric Dynamics II Lesson 10 - Topographic Waves Reference: An Introduction to Dynamic Meteorology (3 rd edition), J.R. Holton Reading: Holton, Section 7.4. STATIONARY WAVES Waves will appear
13. TIDES Tidal waters
 Water levels vary in tidal and non-tidal waters: sailors should be aware that the depths shown on the charts do not always represent the actual amount of water under the boat. 13.1 Tidal waters In tidal
Water levels vary in tidal and non-tidal waters: sailors should be aware that the depths shown on the charts do not always represent the actual amount of water under the boat. 13.1 Tidal waters In tidal
Comparative temperature measurements in an experimental borehole heat exchanger. Vincent Badoux 1, Rita Kobler 2
 European Geothermal Congress 2016 Strasbourg, France, 19-24 Sept 2016 Comparative temperature measurements in an experimental borehole heat exchanger Vincent Badoux 1, Rita Kobler 2 1 GEOTEST AG, Bernstrasse
European Geothermal Congress 2016 Strasbourg, France, 19-24 Sept 2016 Comparative temperature measurements in an experimental borehole heat exchanger Vincent Badoux 1, Rita Kobler 2 1 GEOTEST AG, Bernstrasse
The dryline is a mesoscale phenomena whose development and evaluation is strongly linked to the PBL.
 2.2. Development and Evolution of Drylines The dryline is a mesoscale phenomena whose development and evaluation is strongly linked to the PBL. Text books containing sections on dryline: The Dry Line.
2.2. Development and Evolution of Drylines The dryline is a mesoscale phenomena whose development and evaluation is strongly linked to the PBL. Text books containing sections on dryline: The Dry Line.
APPLICATION OF SOUND PROPAGATION (IN THE PERSIAN GULF AND OMAN SEA)
") APPLICATION OF SOUND PROPAGATION (IN THE PERSIAN GULF AND OMAN SEA) Seyed Majid Mosaddad Department of Physics, Shoushtar Branch, Islamic Azad University, Shoushtar, Iran Email: mosaddad5@gmail.com Abstract
APPLICATION OF SOUND PROPAGATION (IN THE PERSIAN GULF AND OMAN SEA) Seyed Majid Mosaddad Department of Physics, Shoushtar Branch, Islamic Azad University, Shoushtar, Iran Email: mosaddad5@gmail.com Abstract
Unmanned Aerial Vehicle Failure Modes Algorithm Modeling
 IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 04, Issue 07 (July. 2014), V2 PP 55-59 www.iosrjen.org Unmanned Aerial Vehicle Failure Modes Algorithm Modeling P. Getsov,
IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 04, Issue 07 (July. 2014), V2 PP 55-59 www.iosrjen.org Unmanned Aerial Vehicle Failure Modes Algorithm Modeling P. Getsov,
FFI RAPPORT TESTING OF GUN BARREL EROSION BY EROSION BOMB. NEVSTAD Gunnar Ove FFI/RAPPORT-2003/00345
 FFI RAPPORT TESTING OF GUN BARREL EROSION BY EROSION BOMB NEVSTAD Gunnar Ove FFI/RAPPORT-2003/00345 FFIBM/760/130 Approved Kjeller 25. September 2003 Bjarne Haugstad Director of Research TESTING OF GUN
FFI RAPPORT TESTING OF GUN BARREL EROSION BY EROSION BOMB NEVSTAD Gunnar Ove FFI/RAPPORT-2003/00345 FFIBM/760/130 Approved Kjeller 25. September 2003 Bjarne Haugstad Director of Research TESTING OF GUN
DEPARTMENT OF THE NAVY DIVISION NEWPORT OFFICE OF COUNSEL PHONE: FAX: DSN:
 IMAVSBA WARFARE CENTERS NEWPORT DEPARTMENT OF THE NAVY NAVAL UNDERSEA WARFARE CENTER DIVISION NEWPORT OFFICE OF COUNSEL PHONE: 401 832-3653 FAX: 401 832-4432 DSN: 432-3653 Attorney Docket No. 85031 Date:
IMAVSBA WARFARE CENTERS NEWPORT DEPARTMENT OF THE NAVY NAVAL UNDERSEA WARFARE CENTER DIVISION NEWPORT OFFICE OF COUNSEL PHONE: 401 832-3653 FAX: 401 832-4432 DSN: 432-3653 Attorney Docket No. 85031 Date:
Undertow - Zonation of Flow in Broken Wave Bores
 Nearshore Circulation Undertow and Rip Cells Undertow - Zonation of Flow in Broken Wave Bores In the wave breaking process, the landward transfer of water, associated with bore and surface roller decay
Nearshore Circulation Undertow and Rip Cells Undertow - Zonation of Flow in Broken Wave Bores In the wave breaking process, the landward transfer of water, associated with bore and surface roller decay
Figure 2: Principle of GPVS and ILIDS.
 Summary Bubbly flows appear in many industrial applications. In electrochemistry, bubbles emerge on the electrodes in e.g. hydrolysis of water, the production of chloride and as a side-reaction in metal
Summary Bubbly flows appear in many industrial applications. In electrochemistry, bubbles emerge on the electrodes in e.g. hydrolysis of water, the production of chloride and as a side-reaction in metal
SINGULAR WAVES, PROPAGATION AND PROGNOSIS. H. Günther, W. Rosenthal
 SINGULAR WAVES, PROPAGATION AND PROGNOSIS H. Günther, W. Rosenthal GKSS Research Center Geesthacht Institute for Coastal Research Geesthacht, Germany Within the last years a high number of large ships
SINGULAR WAVES, PROPAGATION AND PROGNOSIS H. Günther, W. Rosenthal GKSS Research Center Geesthacht Institute for Coastal Research Geesthacht, Germany Within the last years a high number of large ships
Minimal influence of wind and tidal height on underwater noise in Haro Strait
 Minimal influence of wind and tidal height on underwater noise in Haro Strait Introduction Scott Veirs, Beam Reach Val Veirs, Colorado College December 2, 2007 Assessing the effect of wind and currents
Minimal influence of wind and tidal height on underwater noise in Haro Strait Introduction Scott Veirs, Beam Reach Val Veirs, Colorado College December 2, 2007 Assessing the effect of wind and currents
7 YEARS METEOMAST AMRUMBANK WEST
 7 YEARS METEOMAST AMRUMBANK WEST Joerg Bendfeld(1), Jens Krieger(2) (1) University of Paderborn, Kompetenzzentrum für nachhaltige Energietechnik KET, Pohlweg 55, 33098 Paderborn, Germany, (2) airwerk GmbH,
7 YEARS METEOMAST AMRUMBANK WEST Joerg Bendfeld(1), Jens Krieger(2) (1) University of Paderborn, Kompetenzzentrum für nachhaltige Energietechnik KET, Pohlweg 55, 33098 Paderborn, Germany, (2) airwerk GmbH,
Parts of Longitudinal Waves A compression
 1 Waves All substantive material is from Wave Motion and Sound by James Dann. http://www.ck12.org/flexr/ unless otherwise noted. Illustrations are copyright free. Objects in motion that return to the same
1 Waves All substantive material is from Wave Motion and Sound by James Dann. http://www.ck12.org/flexr/ unless otherwise noted. Illustrations are copyright free. Objects in motion that return to the same
Chapter 11 Waves. Waves transport energy without transporting matter. The intensity is the average power per unit area. It is measured in W/m 2.
 Energy can be transported by particles or waves: Chapter 11 Waves A wave is characterized as some sort of disturbance that travels away from a source. The key difference between particles and waves is
Energy can be transported by particles or waves: Chapter 11 Waves A wave is characterized as some sort of disturbance that travels away from a source. The key difference between particles and waves is
Effect of Suspended Sediment on Acoustic Detection Using Reverberation
 TECHNICAL NOTE Effect of Suspended Sediment on Acoustic Detection Using Reverberation AUTHORS Peter C. Chu Michael Cornelius Naval Ocean Analysis and Prediction Laboratory Department of Oceanography Naval
TECHNICAL NOTE Effect of Suspended Sediment on Acoustic Detection Using Reverberation AUTHORS Peter C. Chu Michael Cornelius Naval Ocean Analysis and Prediction Laboratory Department of Oceanography Naval
AIS data analysis for vessel behavior during strong currents and during encounters in the Botlek area in the Port of Rotterdam
 International Workshop on Next Generation Nautical Traffic Models 2013, Delft, The Netherlands AIS data analysis for vessel behavior during strong currents and during encounters in the Botlek area in the
International Workshop on Next Generation Nautical Traffic Models 2013, Delft, The Netherlands AIS data analysis for vessel behavior during strong currents and during encounters in the Botlek area in the
Wake effects at Horns Rev and their influence on energy production. Kraftværksvej 53 Frederiksborgvej 399. Ph.: Ph.
 Wake effects at Horns Rev and their influence on energy production Martin Méchali (1)(*), Rebecca Barthelmie (2), Sten Frandsen (2), Leo Jensen (1), Pierre-Elouan Réthoré (2) (1) Elsam Engineering (EE)
Wake effects at Horns Rev and their influence on energy production Martin Méchali (1)(*), Rebecca Barthelmie (2), Sten Frandsen (2), Leo Jensen (1), Pierre-Elouan Réthoré (2) (1) Elsam Engineering (EE)
ISOLATION OF NON-HYDROSTATIC REGIONS WITHIN A BASIN
 ISOLATION OF NON-HYDROSTATIC REGIONS WITHIN A BASIN Bridget M. Wadzuk 1 (Member, ASCE) and Ben R. Hodges 2 (Member, ASCE) ABSTRACT Modeling of dynamic pressure appears necessary to achieve a more robust
ISOLATION OF NON-HYDROSTATIC REGIONS WITHIN A BASIN Bridget M. Wadzuk 1 (Member, ASCE) and Ben R. Hodges 2 (Member, ASCE) ABSTRACT Modeling of dynamic pressure appears necessary to achieve a more robust
Wave-Current Interaction in Coastal Inlets and River Mouths
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Current Interaction in Coastal Inlets and River Mouths Tim T. Janssen Department of Geosciences, San Francisco State
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Current Interaction in Coastal Inlets and River Mouths Tim T. Janssen Department of Geosciences, San Francisco State
Characterizing The Surf Zone With Ambient Noise Measurements
 Characterizing The Surf Zone With Ambient Noise Measurements LONG-TERM GOAL Grant Deane Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 93093-0213 phone: (619) 534-0536 fax:
Characterizing The Surf Zone With Ambient Noise Measurements LONG-TERM GOAL Grant Deane Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 93093-0213 phone: (619) 534-0536 fax:
Computational Ocean Acoustics
 Computational Ocean Acoustics Ray Tracing Wavenumber Integration Normal Modes Parabolic Equation Normal Modes Modes for Range-Dependent Envir. Coupled Modes (5.9) One-way Coupled Modes Adiabatic Modes
Computational Ocean Acoustics Ray Tracing Wavenumber Integration Normal Modes Parabolic Equation Normal Modes Modes for Range-Dependent Envir. Coupled Modes (5.9) One-way Coupled Modes Adiabatic Modes
Underwater noise and offshore windfarms
 Underwater noise and offshore windfarms Dr Jeremy Nedwell, Mr John Langworthy and Mr Daren Howell BWEA Conference 4/3/04 Subacoustech reference: 544R0503, COWRIE Copyright. Aim of study To evaluate the
Underwater noise and offshore windfarms Dr Jeremy Nedwell, Mr John Langworthy and Mr Daren Howell BWEA Conference 4/3/04 Subacoustech reference: 544R0503, COWRIE Copyright. Aim of study To evaluate the
Prologue. TSUNAMI - To Survive from Tsunami World Scientific Publishing Co. Pte. Ltd.
 Prologue The Indian Ocean tsunami which occurred on December 26, 2004 caused unprecedented disaster and claimed the priceless lives of more than 300,000 persons worldwide. Among the conditions which contributed
Prologue The Indian Ocean tsunami which occurred on December 26, 2004 caused unprecedented disaster and claimed the priceless lives of more than 300,000 persons worldwide. Among the conditions which contributed
Walk - Run Activity --An S and P Wave Travel Time Simulation ( S minus P Earthquake Location Method)
") Walk - Run Activity --An S and P Wave Travel Time Simulation ( S minus P Earthquake Location Method) L. W. Braile and S. J. Braile (June, 2000) braile@purdue.edu http://web.ics.purdue.edu/~braile Walk
Walk - Run Activity --An S and P Wave Travel Time Simulation ( S minus P Earthquake Location Method) L. W. Braile and S. J. Braile (June, 2000) braile@purdue.edu http://web.ics.purdue.edu/~braile Walk
Appendix 5: Currents in Minas Basin. (Oceans Ltd. 2009)
") Appendix 5: Currents in Minas Basin (Oceans Ltd. 29) Current in Minas Basin May 1, 28 March 29, 29 Submitted To: Minas Basin Pulp and Power P.O. Box 41 53 Prince Street Hansport, NS, BP 1P by 22, Purdy
Appendix 5: Currents in Minas Basin (Oceans Ltd. 29) Current in Minas Basin May 1, 28 March 29, 29 Submitted To: Minas Basin Pulp and Power P.O. Box 41 53 Prince Street Hansport, NS, BP 1P by 22, Purdy
3.6 Magnetic surveys. Sampling Time variations Gradiometers Processing. Sampling
 3.6 Magnetic surveys Sampling Time variations Gradiometers Processing Sampling Magnetic surveys can be taken along profiles or, more often, on a grid. The data for a grid is usually taken with fairly frequent
3.6 Magnetic surveys Sampling Time variations Gradiometers Processing Sampling Magnetic surveys can be taken along profiles or, more often, on a grid. The data for a grid is usually taken with fairly frequent
Inlet Management Study for Pass-A-Grille and Bunces Pass, Pinellas County, Florida
 Inlet Management Study for Pass-A-Grille and Bunces Pass, Pinellas County, Florida Final Report Submitted By Ping Wang, Ph.D., Jun Cheng Ph.D., Zachary Westfall, and Mathieu Vallee Coastal Research Laboratory
Inlet Management Study for Pass-A-Grille and Bunces Pass, Pinellas County, Florida Final Report Submitted By Ping Wang, Ph.D., Jun Cheng Ph.D., Zachary Westfall, and Mathieu Vallee Coastal Research Laboratory
Lesson: Ocean Circulation
 Lesson: Ocean Circulation By Keith Meldahl Corresponding to Chapter 9: Ocean Circulation As this figure shows, there is a connection between the prevailing easterly and westerly winds (discussed in Chapter
Lesson: Ocean Circulation By Keith Meldahl Corresponding to Chapter 9: Ocean Circulation As this figure shows, there is a connection between the prevailing easterly and westerly winds (discussed in Chapter
Outline Chapter 7 Waves
 Outline Chapter 7 Waves 7-1. Water Waves 7-2. Transverse and Longitudinal Waves 7-3. Describing Waves 7-4. Standing Waves 7-5. Sound 7-6. Doppler Effect 7-7. Musical Sounds 7-8. Electromagnetic Waves 7-9.
Outline Chapter 7 Waves 7-1. Water Waves 7-2. Transverse and Longitudinal Waves 7-3. Describing Waves 7-4. Standing Waves 7-5. Sound 7-6. Doppler Effect 7-7. Musical Sounds 7-8. Electromagnetic Waves 7-9.
Appendix A COMPARISON OF DRAINAGE ALGORITHMS UNDER GRAVITY- DRIVEN FLOW DURING GAS INJECTION
 ppendix COMPRISON OF DRINGE LGORITHMS UNDER GRVITY- DRIVEN FLOW DURING GS INJECTION.1 Introduction ll the simulations of gas injection discussed in this thesis were performed using a modified invasion
ppendix COMPRISON OF DRINGE LGORITHMS UNDER GRVITY- DRIVEN FLOW DURING GS INJECTION.1 Introduction ll the simulations of gas injection discussed in this thesis were performed using a modified invasion
Physics 11. Unit 7 (Part 1) Wave Motion
 Wave Motion") Physics 11 Unit 7 (Part 1) Wave Motion 1. Introduction to wave Wave motion is a popular phenomenon that we observe often in our daily lives. For example, light waves, sound waves, radio waves, water waves,
Physics 11 Unit 7 (Part 1) Wave Motion 1. Introduction to wave Wave motion is a popular phenomenon that we observe often in our daily lives. For example, light waves, sound waves, radio waves, water waves,
DUXBURY WAVE MODELING STUDY
 DUXBURY WAVE MODELING STUDY 2008 Status Report Duncan M. FitzGerald Peter S. Rosen Boston University Northeaster University Boston, MA 02215 Boston, MA 02115 Submitted to: DUXBURY BEACH RESERVATION November
DUXBURY WAVE MODELING STUDY 2008 Status Report Duncan M. FitzGerald Peter S. Rosen Boston University Northeaster University Boston, MA 02215 Boston, MA 02115 Submitted to: DUXBURY BEACH RESERVATION November
Chapter 22, Section 1 - Ocean Currents. Section Objectives
 Chapter 22, Section 1 - Ocean Currents Section Objectives Intro Surface Currents Factors Affecting Ocean Currents Global Wind Belts (you should draw and label a diagram of the global wind belts) The Coriolis
Chapter 22, Section 1 - Ocean Currents Section Objectives Intro Surface Currents Factors Affecting Ocean Currents Global Wind Belts (you should draw and label a diagram of the global wind belts) The Coriolis
Full STEAM Ahead: Waves. Version 1 25 April 2018
 Full STEAM Ahead: Waves Version 1 25 April 2018 Full STEAM Ahead! Welcome to Full STEAM Ahead! Today you will be experimenting with the physics of waves. This is a directed and self-directed, self-paced
Full STEAM Ahead: Waves Version 1 25 April 2018 Full STEAM Ahead! Welcome to Full STEAM Ahead! Today you will be experimenting with the physics of waves. This is a directed and self-directed, self-paced
4.4 WAVE CHARACTERISTICS 4.5 WAVE PROPERTIES Student Notes
 4.4 WAVE CHARACTERISTICS 4.5 WAVE PROPERTIES Student Notes I. DIFFERENT TYPES OF WAVES A. TRANSVERSE AND LONGITUDINAL WAVES B. WAVE PULSES AND TRAVELLING WAVES C. SOUND AND WATER WAVES II. DEFINING TERMS
4.4 WAVE CHARACTERISTICS 4.5 WAVE PROPERTIES Student Notes I. DIFFERENT TYPES OF WAVES A. TRANSVERSE AND LONGITUDINAL WAVES B. WAVE PULSES AND TRAVELLING WAVES C. SOUND AND WATER WAVES II. DEFINING TERMS