Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site
|
|
|
- Katrina Preston
- 5 years ago
- Views:
Transcription
1 Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site Prof. Richard Voyles Guangying Jiang Purdue University Collaborative Robotics Lab Purdue Robotics Accelerator

2 U.S. DOE WIPP Site Nuclear waste storage facility in Carlsbad, New Mexico, USA, Deep geological repository licensed to permanently dispose of transuranic radioactive waste Radioactive waste packed in individual storage containers. Inside the WIPP storage facility at the transitional dressing area prior to the boundary between "clean" and "unclean" areas. Energetic incident occurred on Feb. 14, 2014.

3 WIPP: Structure Sub-surface storage facility in deep salt deposits approximately 660 meters (2150 feet) below the surface. Radioactive waste is packed in individual storage containers and lowered by elevator to "panels An improperly loaded container that caused one container to burst, spewing radioactive smoke through a large portion of the WIPP Spatial layout of the U.S. DOE WIPP site indicating surface buildings with four shafts connecting the main work surface 660 meters below ground. (reprinted from

4 Radiological Rollback 4
5 WIPP: Ventilation System Nearly all of the 200 mg of material has been recovered in the HEPA filters Possible trace amounts of americium left in the exhaust shaft The shaft is circular in cross section, 14 feet in diameter, and about 2150 feet long, with 60,000 cubic foot air per minute (CFM) flowing through it. WIPP ventilation system. (reprinted from
6 Challenge Challenge in the inspection and cleaning of the exhaust shaft: constrained environment Very high aspect ration (660 m x 4 m) Partially lined column Water intrusion sensing of americium Low energy Small quantities Requires physical sampling UAV solution of using fully-actuated Dexterous Hexrotor : precision flight in close proximity to the structure walls ability to maintain contact forces at swabbing sites





7 Quick Proof-of-Concept Ideas We settled on two basic approaches, based on existing capabilities: Rapelling CRAWLER robot Tethered robot for core-bored search and rescue Two-limb crawler, supported by environment Lower robot from top of shaft Dexterous Hexrotor UAV Fully-Actuated Aerial Mobile Manipulator Platform Force controllable in 6 DoF Lower half from bottom, Upper half from top

 Use limbs for crawling and sampling")
8 CRAWLER Concept Rapelling Robot to Sampling: Use Existing CRAWLER tethered robot Lower from top of Shaft Suction approach to stick to surface (Jizhong Xiao City Climber wall climbing technology) Use limbs for crawling and sampling discrete points


9 Phase I Discrete Sampling Method Semi-autonomous control Localized by laser and optical flow Sampling by a swab stick Phase I Dexterous Hexrotor Prototype Mock-up flight test in a grain silo Collaboration with CyPhy Works
10 Phase II description


11 Phase II Continuous Sampling Method fully-autonomous control Force control during contact Sampling by a reel to reel platform force measure reel reel to reel sampling Dexterous Hextotor reel sampling material A compression spring pushes sampling material against the shaft surface Measurement of the reaction force


12 Phase II Sampling End Effector Design Slide track hing e reel A front plate holding sampling material against the shaft surface A compression spring pushes the front plate Two slide tracks constraint the movement of front plate One reel driven by a low speed dc motor A hinge allows some tilt reel compression spring Front plate Force Measurement To measure the contact force, a load cell or a potentiometer is used. a a: load cell behind the spring b: potentiometer changed by the front plate b
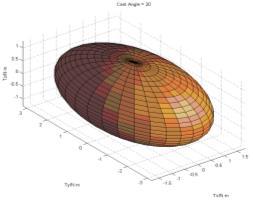
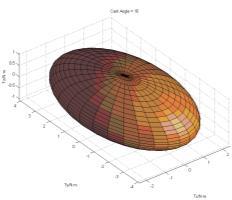
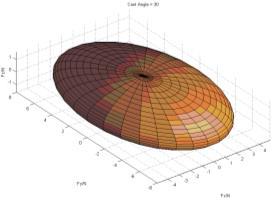
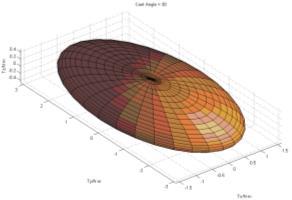
13 Phase II Autonomy Through Visual SLAM Definition of Frames Pilot gives targets coordinates in earth frame Transform targets coordinates to Cartesian coordinates in body frame * * * * * x * y * UAV always keeps its heading along shaft radius, toward shaft surface Simplified fit of LIDAR points to a circle on sample of data points Pressure fused with small number of vidual data points for altitude Earth Frame: Cylindrical coordinates Body Frame: Cartesian coordinates ( x, y ) Exhaust shaft

14 Experiment 2: Position Keeping with Wind Disturbance Flight Test Setup Recorded Position of Dexterous Hexrotor Standard deviation of position error and increased error under wind disturbances Thruster Type Parallel Nonparallel Free Hover 16.2 mm 14.3 mm Under Disturbance 32.1 mm 24.2 mm Increased Error 98.1 % 69.2 % A Nonparallel Hexrotor UAV with Faster Response to Disturbances for Precision Position Keeping SSRR 2014
15 Experiment 3: Low-Altitude Hover Precision Dexterous Hexrotor vs. Quadrotor Makes use of navigation controller Standard deviation of the UAV position Quadrotor Dexterous Hexrotor Normal Flight Low Altitude Flight Increased Errors 7.13 x 2.49 x 50 cm 5 cm A Nonparallel Hexrotor UAV with Faster Response to Disturbances for Precision Position Keeping SSRR 2014


16 Optimization w.r.t. Application Collaborative Robotics Lab 94% Efficient 85% Efficient


17 Static Peg-in-Hole Test Peg-in-hole setup Collaborative Robotics Lab, Purdue University
18 Static Peg-in-Hole Response Time <100 ms Dexterous Hexrotor Quadrotor 300 ms Collaborative Robotics Lab, Purdue University

 3.")
19 Phase I Autonomous Flight Test in Grain Silo Localization Data from take off to fly out of the silo Climb Speed Flight Performance Standard Deviation from Desired 0.5 (m/s) 3.72 (cm) Localization Data in 3D with silo shape indicated




")
")
20 Workshop on Robotic Handling of High- Consequence Materials What are High-Consequence Materials? Materials that require complex processing/investigation Materials that pose significant risk to human handlers and the general public Examples: Military and civilian nuclear waste Infectious biological pathogens with no known cure (BSL-4) Extra-planetary return mission samples (asteroid, comet, moon, planet, etc) What are common implications for a Science of Safety?




21 USAMRIID and Hanford with NASA


22 DOE Sites Dec 7-10, 2015 WIPP, Carlsbad, NM Savannah River, SC Hanford, WA
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances
 First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
Robotic On-Orbit Satellite Servicing: One Size Does Not Fit All
 Robotic On-Orbit Satellite Servicing: One Size Does Not Fit All Dr. David L. Akin Dr. Craig R. Carignan Space Systems Laboratory On-Orbit Servicing Demand by Types Reboost Inspection Dexterous Servicing
Robotic On-Orbit Satellite Servicing: One Size Does Not Fit All Dr. David L. Akin Dr. Craig R. Carignan Space Systems Laboratory On-Orbit Servicing Demand by Types Reboost Inspection Dexterous Servicing
Location: Barkley Canyon Date: September 9, 2013 Constraints: none
 Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
ALFA Task 2 Deliverable M2.2.1: Underwater Vehicle Station Keeping Results
 ALFA Task Deliverable M..: Underwater Vehicle Station Keeping Results Geoffrey Hollinger Oregon State University Phone: 5-737-59 geoff.hollinger@oregonstate.edu September, Introduction This document presents
ALFA Task Deliverable M..: Underwater Vehicle Station Keeping Results Geoffrey Hollinger Oregon State University Phone: 5-737-59 geoff.hollinger@oregonstate.edu September, Introduction This document presents
Design of a double quadruped for the Tech United soccer robot
 Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL
 ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
Locomotion Concepts. Autonomous Mobile Robots. Concepts Legged Locomotion Wheeled Locomotion. Autonomous Systems Lab. Zürich. Localization.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
FixedWingLib CGF. Realistic CGF Aircraft Entities ware-in-the-loop Simulations
 FixedWingLib CGF FixedWingLib CGF offers high-fidelity maneuvers for air combat, close air support and other real-world military and civil manned and unmanned fixed wing operations. Developers can use
FixedWingLib CGF FixedWingLib CGF offers high-fidelity maneuvers for air combat, close air support and other real-world military and civil manned and unmanned fixed wing operations. Developers can use
2011 KIPR Autonomous Arial Vehicle Contest
 2011 KIPR Autonomous Arial Vehicle Contest Version 1.0 10/26/11 Table of Contents Notes... 3 Sponsors... 4 Goals of the 2011 KIPR Autonomous Aerial Vehicle Contest:... 5 This Year s Challenge... 5 Time
2011 KIPR Autonomous Arial Vehicle Contest Version 1.0 10/26/11 Table of Contents Notes... 3 Sponsors... 4 Goals of the 2011 KIPR Autonomous Aerial Vehicle Contest:... 5 This Year s Challenge... 5 Time
This course will deal with Locomotion and Navigation that includes:
 1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
In this course you will learn the following
 Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
IAC-04-IAA DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER
 IAC-04-IAA-3.8.2 DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER Bas Lansdorp, MSc Delft University of Technology, The Netherlands bas.lansdorp@lr.tudelft.nl Prof. ir. H.M.J.R. Soemers
IAC-04-IAA-3.8.2 DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER Bas Lansdorp, MSc Delft University of Technology, The Netherlands bas.lansdorp@lr.tudelft.nl Prof. ir. H.M.J.R. Soemers
DIVE PLAN Leg 1 Dive 11 Recover Wally 1
 DIVE PLAN Leg 1 Dive 11 Recover Wally 1 Page 1 of 6 Location: Barkley Canyon Date: 9 May, 2014 14:00 Constraints: Weather, Sufficient deck space ROV Dive # OE 114 Objectives Prepare Wally I cable for recovery
DIVE PLAN Leg 1 Dive 11 Recover Wally 1 Page 1 of 6 Location: Barkley Canyon Date: 9 May, 2014 14:00 Constraints: Weather, Sufficient deck space ROV Dive # OE 114 Objectives Prepare Wally I cable for recovery
SPH 4C Unit 4 Hydraulics and Pneumatic Systems
 SPH 4C Unit 4 Hydraulics and Pneumatic Systems Properties of Fluids and Pressure Learning Goal: I can explain the properties of fluids and identify associated units. Definitions: Fluid: A substance that
SPH 4C Unit 4 Hydraulics and Pneumatic Systems Properties of Fluids and Pressure Learning Goal: I can explain the properties of fluids and identify associated units. Definitions: Fluid: A substance that
Emergency Procedures
 Emergency Procedures This is a stand alone version from The Manual All licensees must develop an emergency procedures document. This document covers response procedures for incidents of a missing, stolen
Emergency Procedures This is a stand alone version from The Manual All licensees must develop an emergency procedures document. This document covers response procedures for incidents of a missing, stolen
JSETEC2010. Japan Space Elevator Technology and Engineering Competition
 JSETEC2010 Japan Space Elevator Technology and Engineering Competition Japan Space Elevator Association Executive / Technical / Safety management committee JSEA Japan Space Elevator Association (incorporated
JSETEC2010 Japan Space Elevator Technology and Engineering Competition Japan Space Elevator Association Executive / Technical / Safety management committee JSEA Japan Space Elevator Association (incorporated
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane
 Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
5. A bead slides on a curved wire, starting from rest at point A in the figure below. If the wire is frictionless, find each of the following.
 Name: Work and Energy Problems Date: 1. A 2150 kg car moves down a level highway under the actions of two forces: a 1010 N forward force exerted on the drive wheels by the road and a 960 N resistive force.
Name: Work and Energy Problems Date: 1. A 2150 kg car moves down a level highway under the actions of two forces: a 1010 N forward force exerted on the drive wheels by the road and a 960 N resistive force.
SNAKY SPRING WAVE DEMONSTRATION ITEM # ENERGY - MOTION
 T E A C H E G U I R D S E SNAKY SPRING WAVE DEMONSTRATION ITEM # 3640-00 ENERGY - MOTION Waves are all around us. From sound waves, to electromagnetic waves, to seismic waves, we experience wave motion
T E A C H E G U I R D S E SNAKY SPRING WAVE DEMONSTRATION ITEM # 3640-00 ENERGY - MOTION Waves are all around us. From sound waves, to electromagnetic waves, to seismic waves, we experience wave motion
Ballistics and Trajectory
 Ballistics and Trajectory Objective: Students will define the three types of ballistics phases and discuss the effects of ballistics on the round. Ballistics Ballistics is the science of the processes
Ballistics and Trajectory Objective: Students will define the three types of ballistics phases and discuss the effects of ballistics on the round. Ballistics Ballistics is the science of the processes
Circular Motion - Horizontal
 Circular Motion - Horizontal Outcome(s): explain and apply the concepts of centripetal acceleration and centripetal force, as applied to uniform horizontal circular motion. A bucket being swung around
Circular Motion - Horizontal Outcome(s): explain and apply the concepts of centripetal acceleration and centripetal force, as applied to uniform horizontal circular motion. A bucket being swung around
S.C.R.A.T. EXPERIMENT: A STUDENT EXPERIENCE
 CISAS G. Colombo, University of PADOVA, Via Venezia 15, 35131 Padova (ITALY) S.C.R.A.T. EXPERIMENT: A STUDENT EXPERIENCE 1st Symposium on Space Educational Activities Padova, 10th December 2015 Matteo
CISAS G. Colombo, University of PADOVA, Via Venezia 15, 35131 Padova (ITALY) S.C.R.A.T. EXPERIMENT: A STUDENT EXPERIENCE 1st Symposium on Space Educational Activities Padova, 10th December 2015 Matteo
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
High-Velocity Fragment Impact Testing
 High-Velocity Fragment Impact Testing P J Haskins, M D Cook, J Stubberfield, M Sharp and P J Cheese A presentation to: The 2007 Insensitive Munitions & Energetic Materials Technology Symposium 16.10.2007
High-Velocity Fragment Impact Testing P J Haskins, M D Cook, J Stubberfield, M Sharp and P J Cheese A presentation to: The 2007 Insensitive Munitions & Energetic Materials Technology Symposium 16.10.2007
eurathlon 2015 Challenge air+land+sea scenarios
 eurathlon 2015 Challenge air+land+sea scenarios 27 July 2015 Version 3.0 This document is subject to change, refinement and development. Please visit www.eurathlon.eu for the current version. This project
eurathlon 2015 Challenge air+land+sea scenarios 27 July 2015 Version 3.0 This document is subject to change, refinement and development. Please visit www.eurathlon.eu for the current version. This project
Engineering Design Challenge 3. Mars Colonization. Rules & Game Description
 3 Mars Colonization Rules & Game Description Congratulations! Your job application to Lebanese Rocket Society Mars Division has been accepted! As head of the Robotics team, you are in charge of building
3 Mars Colonization Rules & Game Description Congratulations! Your job application to Lebanese Rocket Society Mars Division has been accepted! As head of the Robotics team, you are in charge of building
Re: ENSC 440 Functional Specification for the Wall Climbing Robot. Dear Mr. Leung,
 Patrick Leung School of Engineering Science Simon Fraser University 8888 University Drive Burnaby, BC. V5A 1S6 Date 2/18/08 Re: ENSC 440 Functional Specification for the Wall Climbing Robot Dear Mr. Leung,
Patrick Leung School of Engineering Science Simon Fraser University 8888 University Drive Burnaby, BC. V5A 1S6 Date 2/18/08 Re: ENSC 440 Functional Specification for the Wall Climbing Robot Dear Mr. Leung,
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Ocean Structures and Material Prof. Dr. Srinivasan Chandrasekaran Department of Ocean Engineering Indian Institute of Technology, Madras
 Ocean Structures and Material Prof. Dr. Srinivasan Chandrasekaran Department of Ocean Engineering Indian Institute of Technology, Madras Module - 2 Lecture - 5 Dredging II In the fifth lecture we discussed
Ocean Structures and Material Prof. Dr. Srinivasan Chandrasekaran Department of Ocean Engineering Indian Institute of Technology, Madras Module - 2 Lecture - 5 Dredging II In the fifth lecture we discussed
Fluid Mechanics. Liquids and gases have the ability to flow They are called fluids There are a variety of LAWS that fluids obey
 Fluid Mechanics Fluid Mechanics Liquids and gases have the ability to flow They are called fluids There are a variety of LAWS that fluids obey Density Regardless of form (solid, liquid, gas) we can define
Fluid Mechanics Fluid Mechanics Liquids and gases have the ability to flow They are called fluids There are a variety of LAWS that fluids obey Density Regardless of form (solid, liquid, gas) we can define
ACCESS the BLUE ECONOMY ALL OCEANS Engineering Ltd
 Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Phuel Modular Control Units
 Phuel Modular Phuel Modular, like our market leading Modular BOPs, provide an efficient flexible solution to suit any customer s needs. Each unit is constructed from the best of materials and supportable,
Phuel Modular Phuel Modular, like our market leading Modular BOPs, provide an efficient flexible solution to suit any customer s needs. Each unit is constructed from the best of materials and supportable,
Draganflyer Trainer FLIGHT TRAINING
 Draganflyer Trainer FLIGHT TRAINING 1 of 7 New Operator Flight Training For customers of the Draganflyer X4P, X8, X6, and X4 UAV who are new to the operation of multirotor aircraft, we would like to introduce
Draganflyer Trainer FLIGHT TRAINING 1 of 7 New Operator Flight Training For customers of the Draganflyer X4P, X8, X6, and X4 UAV who are new to the operation of multirotor aircraft, we would like to introduce
2 Available: 1390/08/02 Date of returning: 1390/08/17 1. A suction cup is used to support a plate of weight as shown in below Figure. For the conditio
 1. A suction cup is used to support a plate of weight as shown in below Figure. For the conditions shown, determine. 2. A tanker truck carries water, and the cross section of the truck s tank is shown
1. A suction cup is used to support a plate of weight as shown in below Figure. For the conditions shown, determine. 2. A tanker truck carries water, and the cross section of the truck s tank is shown
Best Practices Pneumatics Machine & Design. Written by Richard F. Bullers, CFPPS as published in Fluid Power Journal, July/August 2016
 Pneumatics Machine & Design Written by Richard F. Bullers, CFPPS as published in Fluid Power Journal, July/August 2016 Contents at Atmospheric Air The air at a compressor s intake contains about 78% nitrogen,
Pneumatics Machine & Design Written by Richard F. Bullers, CFPPS as published in Fluid Power Journal, July/August 2016 Contents at Atmospheric Air The air at a compressor s intake contains about 78% nitrogen,
SHELL FLAGS INSPECTION CASE STUDY
 SHELL FLAGS INSPECTION CASE STUDY J. Nonemaker, Solution Engineer, ROSEN T. Steinvoorte, Business Development, ROSEN R. Subramanian, Pipelines & Subsea Technical Support Engineer, Shell U.K. Limited Introduction
SHELL FLAGS INSPECTION CASE STUDY J. Nonemaker, Solution Engineer, ROSEN T. Steinvoorte, Business Development, ROSEN R. Subramanian, Pipelines & Subsea Technical Support Engineer, Shell U.K. Limited Introduction
Withstanding High Wind Impacts on Biocontainment Facilities
 Withstanding High Wind Impacts on Biocontainment Facilities ABSA International 59 th Annual Biological Safety Conference October 5, 2016 Eugene Cole Program Technical Director NBAF Program Executive Office
Withstanding High Wind Impacts on Biocontainment Facilities ABSA International 59 th Annual Biological Safety Conference October 5, 2016 Eugene Cole Program Technical Director NBAF Program Executive Office
Lesson: Airspeed Control
 11/20/2018 Airspeed Control Page 1 Lesson: Airspeed Control Objectives: o Knowledge o An understanding of the aerodynamics related to airspeed control o Skill o The ability to establish and maintain a
11/20/2018 Airspeed Control Page 1 Lesson: Airspeed Control Objectives: o Knowledge o An understanding of the aerodynamics related to airspeed control o Skill o The ability to establish and maintain a
Helideck Limitations List (HLL)
") HELIDECK LIMITATIONS LIST PART A 1) INTRODUCTION Under the Air Navigation Order (ANO) UK helicopter operators are responsible for ensuring that helidecks to which they fly are fit for purpose. Installation
HELIDECK LIMITATIONS LIST PART A 1) INTRODUCTION Under the Air Navigation Order (ANO) UK helicopter operators are responsible for ensuring that helidecks to which they fly are fit for purpose. Installation
PHYS 101 Previous Exam Problems
 PHYS 101 Previous Exam Problems CHAPTER 14 Fluids Fluids at rest pressure vs. depth Pascal s principle Archimedes s principle Buoynat forces Fluids in motion: Continuity & Bernoulli equations 1. How deep
PHYS 101 Previous Exam Problems CHAPTER 14 Fluids Fluids at rest pressure vs. depth Pascal s principle Archimedes s principle Buoynat forces Fluids in motion: Continuity & Bernoulli equations 1. How deep
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS
 SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
UvA-DARE (Digital Academic Repository) Intelligent Robotics Lab Verschoor, C.R.; de Kok, P.M.; Visser, A. Link to publication
 Intelligent Robotics Lab Verschoor, C.R.; de Kok, P.M.; Visser, A. Link to publication") UvA-DARE (Digital Academic Repository) Intelligent Robotics Lab Verschoor, C.R.; de Kok, P.M.; Visser, A. Link to publication Citation for published version (APA): Verschoor, C. R., de Kok, P. M., & Visser,
UvA-DARE (Digital Academic Repository) Intelligent Robotics Lab Verschoor, C.R.; de Kok, P.M.; Visser, A. Link to publication Citation for published version (APA): Verschoor, C. R., de Kok, P. M., & Visser,
Radio Control Scale Helicopters 2018
 Radio Control Scale Helicopters 2018 RULES GOVERNING MODEL AVIATION COMPETITION IN THE UNITED STATES Amendment Listing Amendment Topic Publication Date Description Original Issue 1/1/2017 Publication of
Radio Control Scale Helicopters 2018 RULES GOVERNING MODEL AVIATION COMPETITION IN THE UNITED STATES Amendment Listing Amendment Topic Publication Date Description Original Issue 1/1/2017 Publication of
Gears Ratios and Speed / Problem Solving
 Teacher Mechanics Note to the teacher On this page, students will learn about the relationship between gear ratio, gear rotational speed, wheel radius, diameter, circumference, revolutions and distance.
Teacher Mechanics Note to the teacher On this page, students will learn about the relationship between gear ratio, gear rotational speed, wheel radius, diameter, circumference, revolutions and distance.
DEPARTMENT SCHOOLS OF HEALTH. respiratory protection. Proper adherence to bloodborne pathogen handling protocols.
 ANIMAL WORK: Work in laboratories, procedure rooms, surgery rooms and animal housing facilities containing animals. Refer to specific Animal Care Protocols. All lab workers who work in a lab conducting
ANIMAL WORK: Work in laboratories, procedure rooms, surgery rooms and animal housing facilities containing animals. Refer to specific Animal Care Protocols. All lab workers who work in a lab conducting
TECHNICAL REPORT A-061/2003 DATA SUMMARY
 TECHNICAL REPORT A-061/2003 DATA SUMMARY LOCATION Date and time Site Wednesday, 24th Sept. 2003; 13:20 h local time 1 NM to the south of Porto Petro (Balearic Islands) AIRCRAFT Registration Type and model
TECHNICAL REPORT A-061/2003 DATA SUMMARY LOCATION Date and time Site Wednesday, 24th Sept. 2003; 13:20 h local time 1 NM to the south of Porto Petro (Balearic Islands) AIRCRAFT Registration Type and model
Fuel for the Fire. Name Student Activity. Open the TI-Nspire document Fuel for the Fire.tns.
 Open the TI-Nspire document Fuel for the Fire.tns. You ve probably heard about Neil Armstrong and his first footstep on the moon but have you ever considered the fuel it took to get there? Fueling NASA
Open the TI-Nspire document Fuel for the Fire.tns. You ve probably heard about Neil Armstrong and his first footstep on the moon but have you ever considered the fuel it took to get there? Fueling NASA
Spider Robot for Motion with Quasistatic. Force Constraints
 Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
FAI Sporting Code. UAV Class U. Section 12 Unmanned Aerial Vehicles Edition. Effective 1st January 2018
 FAI Sporting Code Section 12 Unmanned Aerial Vehicles UAV Class U 2018 Edition Effective 1st January 2018 Section 12 and General Section combined make up the complete Sporting Code for UAV FEDERATION AERONAUTIQUE
FAI Sporting Code Section 12 Unmanned Aerial Vehicles UAV Class U 2018 Edition Effective 1st January 2018 Section 12 and General Section combined make up the complete Sporting Code for UAV FEDERATION AERONAUTIQUE
UNPIGGABLE NO MORE! PRACTICAL SOLUTIONS FOR CHALLENGING PIPELINES
 UNPIGGABLE NO MORE! PRACTICAL SOLUTIONS FOR CHALLENGING PIPELINES Markus Ginten, Thomas Beuker, Tom Steinvoorte PPSA Seminar Aberdeen, 20 th November 2013 CONTENT 1. Evolutional Process 2. Managing Complexity
UNPIGGABLE NO MORE! PRACTICAL SOLUTIONS FOR CHALLENGING PIPELINES Markus Ginten, Thomas Beuker, Tom Steinvoorte PPSA Seminar Aberdeen, 20 th November 2013 CONTENT 1. Evolutional Process 2. Managing Complexity
LONG METAL SPRING ITEM # ENERGY - MOTION
 T E A C H E G U I R D S E LONG METAL SPRING ITEM # 3638-01 ENERGY - MOTION Waves are all around us. From sound waves, to electromagnetic waves, to seismic waves, we experience wave motion on a daily basis.
T E A C H E G U I R D S E LONG METAL SPRING ITEM # 3638-01 ENERGY - MOTION Waves are all around us. From sound waves, to electromagnetic waves, to seismic waves, we experience wave motion on a daily basis.
DEPARTMENT SCHOOLS OF HEALTH
 PATIENT LIFTING: Work with patients/human subjects may involve lifting and moving of patients. Exposure to physical injury from lifting and moving of patients/human subjects. Avoid unnecessary exposures.
PATIENT LIFTING: Work with patients/human subjects may involve lifting and moving of patients. Exposure to physical injury from lifting and moving of patients/human subjects. Avoid unnecessary exposures.
Conceptual Design and Passive Stability of Tethered Platforms
 Conceptual Design and Passive Stability of Tethered Platforms Sara Smoot Advised by Ilan Kroo 1 Towed Bodies Definition: Two or more tethered objects immersed in a moving fluid. Aerostats Underwater towed
Conceptual Design and Passive Stability of Tethered Platforms Sara Smoot Advised by Ilan Kroo 1 Towed Bodies Definition: Two or more tethered objects immersed in a moving fluid. Aerostats Underwater towed
Impact of Prior Flight Experience on Learning Predator UAV Operator Skills
 Impact of Prior Flight Experience on Learning Predator UAV Operator Skills Human Factors of UAVs Workshop May 24-25, 2004 Dr. Elizabeth Martin, AFRL/HEA Brian Schreiber, Lockheed Martin Dr. Don Lyon, L3COM
Impact of Prior Flight Experience on Learning Predator UAV Operator Skills Human Factors of UAVs Workshop May 24-25, 2004 Dr. Elizabeth Martin, AFRL/HEA Brian Schreiber, Lockheed Martin Dr. Don Lyon, L3COM
Pneumatics for Newbies Designing a Pneumatic Solution
 Pneumatics for Newbies Designing a Pneumatic Solution FIRST Robotics Team 358, Hauppauge, NY Introduction Pneumatics is using air to push/pull things. The pistons and tubing are light and powerful, lighter
Pneumatics for Newbies Designing a Pneumatic Solution FIRST Robotics Team 358, Hauppauge, NY Introduction Pneumatics is using air to push/pull things. The pistons and tubing are light and powerful, lighter
Finding Surface Areas and Volumes of Cylinders
 Finding Surface Areas and Volumes of Cylinders Cylinder - A three-dimensional figure with two parallel circular bases and a curved lateral surface that connects the bases. Base of a Cylinder - One of the
Finding Surface Areas and Volumes of Cylinders Cylinder - A three-dimensional figure with two parallel circular bases and a curved lateral surface that connects the bases. Base of a Cylinder - One of the
Control of Nuclear Gloveboxes and Enclosures Using the No- Moving-Part Vortex Amplifier (VXA)
") Control of Nuclear Gloveboxes and Enclosures Using the No- Moving-Part Vortex Amplifier (VXA) ABSTRACT M.J. Crossley AEA Technology ES. Inc. 1100 Jadwin Ave, Richland, WA 99352, USA This paper describes
Control of Nuclear Gloveboxes and Enclosures Using the No- Moving-Part Vortex Amplifier (VXA) ABSTRACT M.J. Crossley AEA Technology ES. Inc. 1100 Jadwin Ave, Richland, WA 99352, USA This paper describes
Airborne Activity Sampling and Monitoring at Hinkley Point A Site. David Williams, Hinkley Point A Site
 Airborne Activity Sampling and Monitoring at Hinkley Point A Site David Williams, Hinkley Point A Site Presentation objectives Ventilation controls in use at Hinkley Point A Site The air sampling and monitoring
Airborne Activity Sampling and Monitoring at Hinkley Point A Site David Williams, Hinkley Point A Site Presentation objectives Ventilation controls in use at Hinkley Point A Site The air sampling and monitoring
The Usage of Propeller Tunnels For Higher Efficiency and Lower Vibration. M. Burak Şamşul
 The Usage of Propeller Tunnels For Higher Efficiency and Lower Vibration M. Burak Şamşul ITU AYOC 2014 - Milper Pervane Teknolojileri Company Profile MILPER is established in 2011 as a Research and Development
The Usage of Propeller Tunnels For Higher Efficiency and Lower Vibration M. Burak Şamşul ITU AYOC 2014 - Milper Pervane Teknolojileri Company Profile MILPER is established in 2011 as a Research and Development
ATTACHMENT O WIPP MINE VENTILATION RATE MONITORING PLAN
 ATTACHMENT O WIPP MINE VENTILATION RATE MONITORING PLAN (This page intentionally blank) ATTACHMENT O WIPP MINE VENTILATION RATE MONITORING PLAN TABLE OF CONTENTS O- Definitions... O- Objective... O- Design
ATTACHMENT O WIPP MINE VENTILATION RATE MONITORING PLAN (This page intentionally blank) ATTACHMENT O WIPP MINE VENTILATION RATE MONITORING PLAN TABLE OF CONTENTS O- Definitions... O- Objective... O- Design
Assignment 1 Unit 3 Work, Power, Efficiency, and Potential Energy Name: Multiple Choice. Show workings where necessary.
 Assignment 1 Unit 3 Work, Power, Efficiency, and Potential Energy Name: Multiple Choice. Show workings where necessary. 1. In which situation is work not done? A) a frozen turkey is carried upstairs B)
Assignment 1 Unit 3 Work, Power, Efficiency, and Potential Energy Name: Multiple Choice. Show workings where necessary. 1. In which situation is work not done? A) a frozen turkey is carried upstairs B)
Avionics System Project. Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili
 Avionics System Project Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili Link Budgets for Communication Communication needs during the mission are divided into distinct phases,
Avionics System Project Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili Link Budgets for Communication Communication needs during the mission are divided into distinct phases,
One of the most important gauges on the panel is
 stick & rudder flight advisor Is Your Airspeed Indicator Honest? An accuracy how-to H.C. SKIP SMITH One of the most important gauges on the panel is the airspeed indicator. This is particularly true if
stick & rudder flight advisor Is Your Airspeed Indicator Honest? An accuracy how-to H.C. SKIP SMITH One of the most important gauges on the panel is the airspeed indicator. This is particularly true if
Legislation, Interim Storage, and Alternatives to Yucca Mountain
 Legislation, Interim Storage, and Alternatives to Yucca Mountain Robert Halstead Nevada Agency for Nuclear Projects Sierra Nevada Forum October 10, 2017 Carson City, Nevada Documentation at http://www.state.nv.us/nucwaste/
Legislation, Interim Storage, and Alternatives to Yucca Mountain Robert Halstead Nevada Agency for Nuclear Projects Sierra Nevada Forum October 10, 2017 Carson City, Nevada Documentation at http://www.state.nv.us/nucwaste/
Maneuver Descriptions
 2017-2018 Senior Pattern Association Section III Maneuver Descriptions NOTE: MANEUVER DESCRIPTIONS THAT FOLLOW ARE TAKEN VERBATIM FROM THE APPROPRIATE AMA RULE BOOKS FROM WHICH THE MANEUVERS WERE TAKEN.
2017-2018 Senior Pattern Association Section III Maneuver Descriptions NOTE: MANEUVER DESCRIPTIONS THAT FOLLOW ARE TAKEN VERBATIM FROM THE APPROPRIATE AMA RULE BOOKS FROM WHICH THE MANEUVERS WERE TAKEN.
Cased-Hole Logging Environment
 Cased-Hole Logging Environment 2 Planning a Production Logging Job Planning is an important part of a production logging job. Frequently these jobs can only be done in safety during daylight. Thus, the
Cased-Hole Logging Environment 2 Planning a Production Logging Job Planning is an important part of a production logging job. Frequently these jobs can only be done in safety during daylight. Thus, the
Introduction to Robotics for 3D Additive Construction
 Introduction to Robotics for 3D Additive Construction Brian Wilcox, Manager, Space Robotics Technology Jet Propulsion Laboratory, California Institute of Technology 24 Aug 20105 Robotics for 3D Additive
Introduction to Robotics for 3D Additive Construction Brian Wilcox, Manager, Space Robotics Technology Jet Propulsion Laboratory, California Institute of Technology 24 Aug 20105 Robotics for 3D Additive
Launch Vehicle Performance Estimation:
 Launch Vehicle Performance Estimation: John Schilling john.schilling@alumni.usc.edu (661) 718-0955 3 December 2009 Precise determination of launch vehicle performance typically requires the use of three-
Launch Vehicle Performance Estimation: John Schilling john.schilling@alumni.usc.edu (661) 718-0955 3 December 2009 Precise determination of launch vehicle performance typically requires the use of three-
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Front Cover Picture Mark Rasmussen - Fotolia.com
 Flight Maneuvers And Stick and Rudder Skills A complete learn to fly handbook by one of aviation s most knowledgeable and experienced flight instructors Front Cover Picture Mark Rasmussen - Fotolia.com
Flight Maneuvers And Stick and Rudder Skills A complete learn to fly handbook by one of aviation s most knowledgeable and experienced flight instructors Front Cover Picture Mark Rasmussen - Fotolia.com
Line Following with RobotC Page 1
 Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
Welcome to Aerospace Engineering
 Welcome to Aerospace Engineering DESIGN-CENTERED INTRODUCTION TO AEROSPACE ENGINEERING Notes 4 Topics 1. Course Organization 2. Today's Dreams in Various Speed Ranges 3. Designing a Flight Vehicle: Route
Welcome to Aerospace Engineering DESIGN-CENTERED INTRODUCTION TO AEROSPACE ENGINEERING Notes 4 Topics 1. Course Organization 2. Today's Dreams in Various Speed Ranges 3. Designing a Flight Vehicle: Route
Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016
 Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016 Peter Yu, Fangzhou Xia, Ryan Fish, Kamal Youcef-Toumi, and Alberto Rodriguez 2016-11-29 Note 1. Website
Pokemon Robotics Challenge: Gotta Catch em All 2.12: Introduction to Robotics Project Rules Fall 2016 Peter Yu, Fangzhou Xia, Ryan Fish, Kamal Youcef-Toumi, and Alberto Rodriguez 2016-11-29 Note 1. Website
Liquids and Gases. 2/26/2012 Physics 214 Fall
 Liquids and Gases The unit of volume is the meter cubed, m 3, which is a very large volume. Very often we use cm 3 = cc. Other everyday units are gallons, quarts, pints As we know liquids and gases act
Liquids and Gases The unit of volume is the meter cubed, m 3, which is a very large volume. Very often we use cm 3 = cc. Other everyday units are gallons, quarts, pints As we know liquids and gases act
Morgan DeLuca 11/2/2012
 Morgan DeLuca 11/2/2012 Telescoping Bicycle Rack for Transit Buses MSDI: TBD Project Description: The goal of this project is to modify the current transit racks to allow for additional bicycles. This
Morgan DeLuca 11/2/2012 Telescoping Bicycle Rack for Transit Buses MSDI: TBD Project Description: The goal of this project is to modify the current transit racks to allow for additional bicycles. This
Example A: A 400-N force is applied to a tabletop over a square area with side-length L = 20-cm.
 Physics 17 Part H Fluids and Pressure Uni-Directional Pressure The pressure that is applied over an area is the force applied, divided by the area. A 400-N force is applied to a tabletop over a square
Physics 17 Part H Fluids and Pressure Uni-Directional Pressure The pressure that is applied over an area is the force applied, divided by the area. A 400-N force is applied to a tabletop over a square
In-Service Inspection of Ammonia Storage Tanks
 White Paper In-Service Inspection of Ammonia Storage Tanks By: Ole Noerrekaer Mortensen, Business Manager, Advanced NDT Global at FORCE Technology Personnel ready for mounting the Inspection System in
White Paper In-Service Inspection of Ammonia Storage Tanks By: Ole Noerrekaer Mortensen, Business Manager, Advanced NDT Global at FORCE Technology Personnel ready for mounting the Inspection System in
Pressure is defined as force per unit area. Any fluid can exert a force
 Physics Notes Chapter 9 Fluid Mechanics Fluids Fluids are materials that flow, which include both liquids and gases. Liquids have a definite volume but gases do not. In our analysis of fluids it is necessary
Physics Notes Chapter 9 Fluid Mechanics Fluids Fluids are materials that flow, which include both liquids and gases. Liquids have a definite volume but gases do not. In our analysis of fluids it is necessary
Model Aeronautics Association of Canada. Wings Program
 Model Aeronautics Association of Canada Wings Program Table of Contents Purpose of the Program... 1 Flying Proficiency Levels.....1 General Rules and Conditions... 1 "A" Level Control.....2 "B" Level Control...
Model Aeronautics Association of Canada Wings Program Table of Contents Purpose of the Program... 1 Flying Proficiency Levels.....1 General Rules and Conditions... 1 "A" Level Control.....2 "B" Level Control...
BOREWELL RESCUE ROBOT
 BOREWELL RESCUE ROBOT 1 Rajarathnam D.R.P, 2 Lakshmi Raj Thilak R, 2 Rithvik K, 2 Vignesh G, 2 Mohamed Marsook Hameed SH 1 AssociateProfessor, Department of Mechatronics Engineering, Paavai Engineering
BOREWELL RESCUE ROBOT 1 Rajarathnam D.R.P, 2 Lakshmi Raj Thilak R, 2 Rithvik K, 2 Vignesh G, 2 Mohamed Marsook Hameed SH 1 AssociateProfessor, Department of Mechatronics Engineering, Paavai Engineering
MANUFACTURE OF SUBSTRUCTURE BY AUTOMATED FIBER PLACEMENT
 MANUFACTURE OF SUBSTRUCTURE BY AUTOMATED FIBER PLACEMENT Trevor S. Angell Spirit AeroSystems 3365 S. Oliver St. Wichita, KS 67278 Todd Rudberg Electroimpact 4413 Chennault Beach Rd. Mukilteo, WA 98275
MANUFACTURE OF SUBSTRUCTURE BY AUTOMATED FIBER PLACEMENT Trevor S. Angell Spirit AeroSystems 3365 S. Oliver St. Wichita, KS 67278 Todd Rudberg Electroimpact 4413 Chennault Beach Rd. Mukilteo, WA 98275
Development of an end-effector to simulate the foot to ball interaction of an instep kick in soccer
 Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 284 289 9 th Conference of the International Sports Engineering Association (ISEA) Development of an end-effector to simulate the
Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 284 289 9 th Conference of the International Sports Engineering Association (ISEA) Development of an end-effector to simulate the
Locomotion Configuration of a Robust Rappelling Robot
 Locomotion Configuration of a Robust Rappelling Robot Dimitrios Apostolopoulos The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213-3891 USA John Bares Abstract Robotic rappelling is
Locomotion Configuration of a Robust Rappelling Robot Dimitrios Apostolopoulos The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213-3891 USA John Bares Abstract Robotic rappelling is
ZIN Technologies PHi Engineering Support. PHi-RPT CFD Analysis of Large Bubble Mixing. June 26, 2006
 ZIN Technologies PHi Engineering Support PHi-RPT-0002 CFD Analysis of Large Bubble Mixing Proprietary ZIN Technologies, Inc. For nearly five decades, ZIN Technologies has provided integrated products and
ZIN Technologies PHi Engineering Support PHi-RPT-0002 CFD Analysis of Large Bubble Mixing Proprietary ZIN Technologies, Inc. For nearly five decades, ZIN Technologies has provided integrated products and
E Lightband Compression Tool Operating Procedure
 2002159E Lightband Compression Tool Operating Procedure Organization Name MLB Diameter MLB Assembly Number MLB Assembly Revision MLB Serial Number Instructions: IF LCTS ARE NOT YET INSTALLED ON LIGHTBAND:
2002159E Lightband Compression Tool Operating Procedure Organization Name MLB Diameter MLB Assembly Number MLB Assembly Revision MLB Serial Number Instructions: IF LCTS ARE NOT YET INSTALLED ON LIGHTBAND:
Flex-Kleen CT Series Pulse-Jet Dust Collectors For high pressure/high vacuum applications
 Bulletin CT Flex-Kleen CT Series Pulse-Jet Dust Collectors For high pressure/high vacuum applications CT (Circular Tank) COLLECTORS... especially effective for dusting problems in drying, grinding and
Bulletin CT Flex-Kleen CT Series Pulse-Jet Dust Collectors For high pressure/high vacuum applications CT (Circular Tank) COLLECTORS... especially effective for dusting problems in drying, grinding and
Autonomous blimp control with reinforcement learning
 University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2009 Autonomous blimp control with reinforcement learning Yiwei
University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2009 Autonomous blimp control with reinforcement learning Yiwei
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test
 NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
Wave-Phase-Resolved Air-Sea Interaction
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
Grade 6 Lesson 1. Lesson Plan Page 2. Student Activity Handout Page 5
 Grade 6 Lesson 1 Item Page Lesson Plan Page 2 Student Activity Handout Page 5 Marlins Think Tank: Sixth Grade Science Lesson Plan #1 VISION-SETTING OBJECTIVE. What is your objective? SC.6.E.7.3 - Describe
Grade 6 Lesson 1 Item Page Lesson Plan Page 2 Student Activity Handout Page 5 Marlins Think Tank: Sixth Grade Science Lesson Plan #1 VISION-SETTING OBJECTIVE. What is your objective? SC.6.E.7.3 - Describe
Worksheet 1.1 Kinematics in 1D
 Worksheet 1.1 Kinematics in 1D Solve all problems on your own paper showing all work! 1. A tourist averaged 82 km/h for a 6.5 h trip in her Volkswagen. How far did she go? 2. Change these speeds so that
Worksheet 1.1 Kinematics in 1D Solve all problems on your own paper showing all work! 1. A tourist averaged 82 km/h for a 6.5 h trip in her Volkswagen. How far did she go? 2. Change these speeds so that
Idea Bank. Electric Motor. Pulley. Reciprocating Rod. Inflated Arm Segment
 Idea Bank Use these ideas as suggestions for additional testing and measurement apparatus and for techniques that could be employed for constructing suit parts. 1. Suit Arm and Leg Bending Tester Electric
Idea Bank Use these ideas as suggestions for additional testing and measurement apparatus and for techniques that could be employed for constructing suit parts. 1. Suit Arm and Leg Bending Tester Electric
14 The Divine Art of Hovering
 14 The Divine Art of Hovering INTRODUCTION Having learned the fundamentals of controlling the helicopter in forward flight, the next step is hovering. To the Hover! In many schools, hovering is one of
14 The Divine Art of Hovering INTRODUCTION Having learned the fundamentals of controlling the helicopter in forward flight, the next step is hovering. To the Hover! In many schools, hovering is one of
The Athlete. The 100m Hurdles. Athletic Ability. Internal Drive. Stick-to-it-ness
 The 100m Hurdles The Athlete Athletic Ability Internal Drive Stick-to-it-ness Try everyone and don t count anyone out you might miss out on an athlete as they develop. Average to better than average speed
The 100m Hurdles The Athlete Athletic Ability Internal Drive Stick-to-it-ness Try everyone and don t count anyone out you might miss out on an athlete as they develop. Average to better than average speed