Object Recognition. Selim Aksoy. Bilkent University
|
|
|
- Reynold Thomas
- 5 years ago
- Views:
Transcription
1 Image Classification and Object Recognition Selim Aksoy Department of Computer Engineering Bilkent University
2 Image classification Image (scene) classification is a fundamental problem in image understanding. Automatic techniques for associating scenes with semantic labels have a high potential for improving the performance of other computer vision applications such as browsing (natural grouping of images instead of clusters based only on low-level features), retrieval (filtering images in archives based on content), and object recognition (the probability of an unknown object/region that exhibits several local features of a ship actually being a ship can be increased if the scene context is known to be a coast with high confidence but can be decreased if no water related context is dominant in that scene). CS 484, Spring , Selim Aksoy 2
3 Image classification The image classification problem has two critical components: representing images and learning models for semantic categories using these representations. Early work used low-level global features extracted from the whole image or from a fixed spatial layout. More recent approaches exploit local statistics in images using patches extracted by interest point detectors. Other configurations that use regions and their spatial relationships are also proposed. CS 484, Spring , Selim Aksoy 3
 City Landscape Others Sunset Mountain/forest Mountain Forest")

4 Hierarchical image classification Images Others (Face/close-up) Indoor Outdoor Others (Face/close-up) City Landscape Others Sunset Mountain/forest Mountain Forest Hierarchy of 11 scene categories (Vailaya et al., Image classification for content-based indexing, IEEE Trans. Image Processing, 2001). CS 484, Spring , Selim Aksoy 4
5 Hierarchical image classification Image representation: Mean and std. dev. of LUV values in 10x10 blocks for indoor/outdoor classification. Edge direction histograms for city/landscape classification. Histograms of HSV and LUV values for sunset/mountain/forest classification. Classification: Class-conditional density estimation using vector quantization. Bayesian classification. CS 484, Spring , Selim Aksoy 5

6 Hierarchical image classification CS 484, Spring , Selim Aksoy 6

7 Hierarchical image classification CS 484, Spring , Selim Aksoy 7






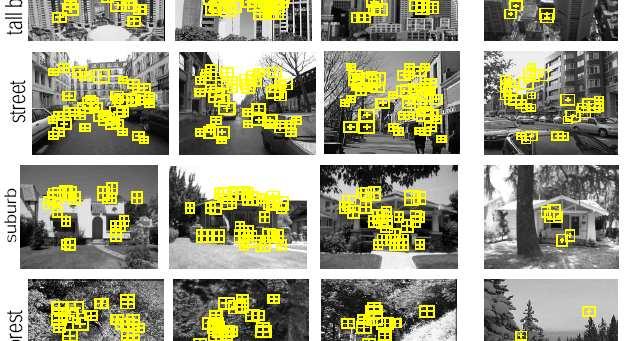
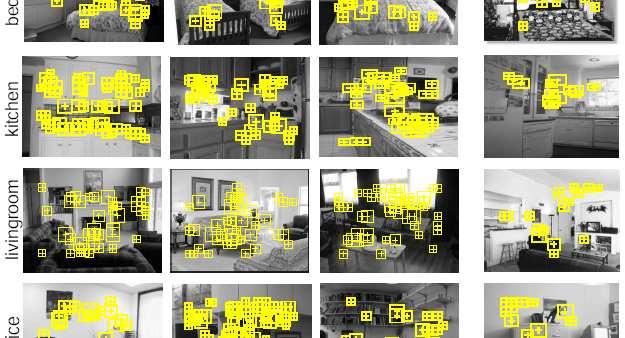
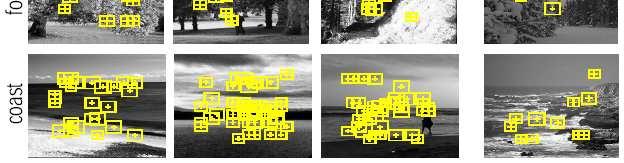
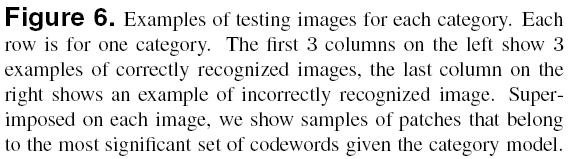
8 Image classification using bag-of-words Caltech data set: 13 natural scene categories. IDIAP data set (left to right): mountain, forest, indoor, city-panorama, city-street. CS 484, Spring , Selim Aksoy 8
9 Image classification using bag-of-words Flowchart from Fei-Fei Li, Pietro Perona, A Bayesian hierarchical model for learning natural scene categories, IEEE CVPR, CS 484, Spring , Selim Aksoy 9



10 Image classification using bag-of-words A codebook obtained from 650 training examples from 13 categories. Image patches are detected by a sliding grid and random sampling of scales. CS 484, Spring , Selim Aksoy 10


11 CS 484, Spring , Selim Aksoy 11


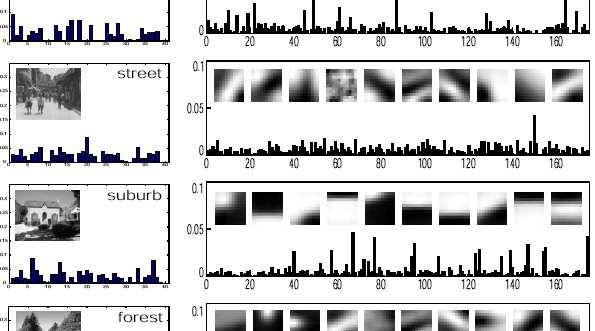
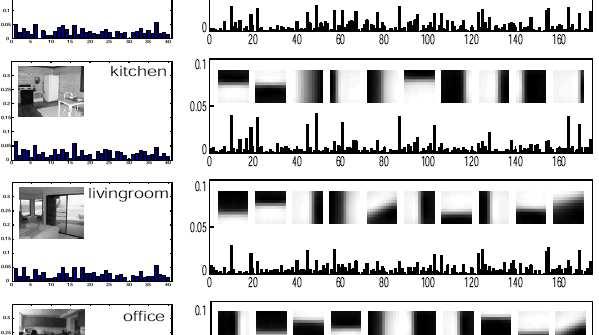
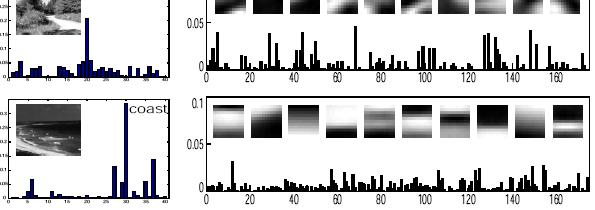
12 CS 484, Spring , Selim Aksoy 12


13 Image classification using bag-of-words CS 484, Spring , Selim Aksoy 13
 is used to learn aspect models to capture co-occurrences of visterms (visual terms).")
14 Image classification using bag-of-words Flowchart from Quelhas et al., A thousand words in a scene, IEEE Trans. PAMI, Probabilistic Latent Semantic Analysis (PLSA) is used to learn aspect models to capture co-occurrences of visterms (visual terms). Bag-of-visterms representation or the aspect parameters are given as input to Support Vector Machines for classification. CS 484, Spring , Selim Aksoy 14

15 Image classification using bag-of-words CS 484, Spring , Selim Aksoy 15


16 CS 484, Spring , Selim Aksoy 16
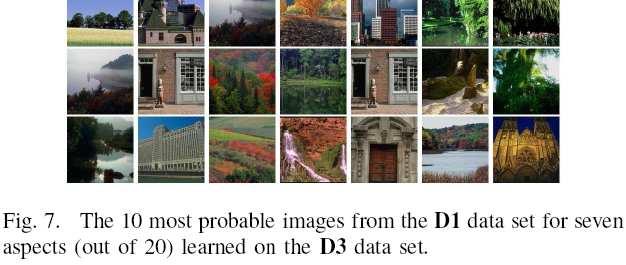
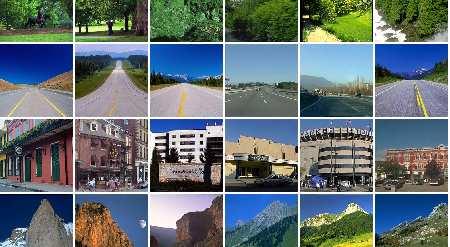
17 Image classification using bag-of-regions D. Gökalp, S. Aksoy, Scene classification using bag-of-regions representations, IEEE CVPR, Beyond Patches Workshop, Region segmentation Region clustering region codebook Above-below spatial relationships region pairs Statistical region selection: identify region types that are frequently found in a particular class of scenes but rarely exist in other classes, and consistently occur together in the same class of scenes. Bayesian scene classification using bag of individual regions, bag of region pairs. CS 484, Spring , Selim Aksoy 17

18 Image classification using bag-of-regions Examples for region clusters. Each row represents a different cluster. CS 484, Spring , Selim Aksoy 18

19 Image classification using bag-of-regions CS 484, Spring , Selim Aksoy 19



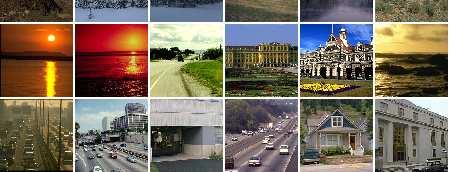

20 Image classification using bag-of-regions Examples for correctly classified scenes. Examples for wrongly classified scenes. CS 484, Spring , Selim Aksoy 20


21 Image classification using factor graphs Boutell et al., Scene Parsing Using Region-Based Generative Models, IEEE Trans. Multimedia, CS 484, Spring , Selim Aksoy 21

22 ICCV 2005 Beijing, Short Course, Oct 15 Recognizing and Learning Object Categories Li Fei-Fei, UIUC Rob Fergus, MIT Antonio Torralba, MIT

23 Agenda Introduction Bag of words models Part-based models Discriminative methods Segmentation and recognition Conclusions CS 484, Spring , Selim Aksoy 23
24 perceptible vision material thing CS 484, Spring , Selim Aksoy 24



25 How many object categories are there? Biederman 1987 CS 484, Spring , Selim Aksoy 25
26 So what does object recognition involve? CS 484, Spring , Selim Aksoy 26
27 Verification: is that a bus? CS 484, Spring , Selim Aksoy 27
28 Detection: are there cars? CS 484, Spring , Selim Aksoy 28
29 Identification: is that a picture of Mao? CS 484, Spring , Selim Aksoy 29
30 Object categorization sky building flag banner bus face street lamp bus wall cars CS 484, Spring , Selim Aksoy 30



31 Scene and context categorization outdoor city traffic CS 484, Spring , Selim Aksoy 31


32 Challenges 1: view point variation Michelangelo CS 484, Spring , Selim Aksoy 32





33 Challenges 2: illumination slide credit: S. Ullman CS 484, Spring , Selim Aksoy 33
34 Challenges 3: occlusion Magritte, 1957 CS 484, Spring , Selim Aksoy 34
35 Challenges 4: scale CS 484, Spring , Selim Aksoy 35
36 Challenges 5: deformation Xu, Beihong 1943 CS 484, Spring , Selim Aksoy 36



37 Challenges 6: background clutter Klimt, 1913 CS 484, Spring , Selim Aksoy 37




38 History: single object recognition CS 484, Spring , Selim Aksoy 38






39 Challenges 7: intra-class variation CS 484, Spring , Selim Aksoy 39
40 History: early object categorization CS 484, Spring , Selim Aksoy 40


41 CS 484, Spring , Selim Aksoy 41



42 ANIMALS PLANTS OBJECTS INANIMATE.. VERTEBRATE NATURAL MAN-MADE MAMMALS BIRDS TAPIR BOAR GROUSE CAMERA CS 484, Spring , Selim Aksoy 42



43 CS 484, Spring , Selim Aksoy 43
44 Scenes, Objects, and Parts Scene Objects Parts E. Sudderth, A. Torralba, W. Freeman, A. Willsky. ICCV Features CS 484, Spring , Selim Aksoy 44
45 Object categorization: the statistical viewpoint p( zebra image ) vs. p( no zebra image) Bayes rule: p ( zebra image ) p ( image zebra ) p ( zebra ) = p( no zebra image) p( image no zebra) p( no zebra) posterior ratio likelihood ratio prior ratio CS 484, Spring , Selim Aksoy 45
46 Object categorization: the statistical viewpoint p( zebra image) p( image zebra) p( zebra) = p( no zebra image) p( image no zebra) p( no zebra) posterior ratio likelihood ratio prior ratio Discriminative methods model posterior Generative methods model likelihood and prior CS 484, Spring , Selim Aksoy 46
47 Discriminative Direct modeling of p( zebra image) p( no zebra image) Decision boundary Zebra Non-zebra CS 484, Spring , Selim Aksoy 47
 p ( image zebra ) Low")

48 Generative Model p( image zebra) and p( image no zebra) p ( image zebra ) Low High p( image no zebra) Middle Middle Low CS 484, Spring , Selim Aksoy 48
49 Three main issues Representation How to represent an object category Learning How to form the classifier, given training data Recognition How the classifier is to be used on novel data CS 484, Spring , Selim Aksoy 49



50 Representation Generative / discriminative / hybrid CS 484, Spring , Selim Aksoy 50
51 Representation Generative / discriminative / hybrid Appearance only or location and appearance CS 484, Spring , Selim Aksoy 51
52 Representation Generative / discriminative / hybrid Appearance only or location and appearance Invariances View point Illumination Occlusion Scale Deformation Clutter etc. CS 484, Spring , Selim Aksoy 52
53 Representation Generative / discriminative / hybrid Appearance only or location and appearance invariances Part-based or global w/subwindow CS 484, Spring , Selim Aksoy 53
54 Representation Generative / discriminative / hybrid Appearance only or location and appearance invariances Parts or global w/subwindow Use set of features or each pixel in image CS 484, Spring , Selim Aksoy 54


55 Learning Unclear how to model categories, so we learn what distinguishes them rather than manually specify the difference -- hence current interest in machine learning CS 484, Spring , Selim Aksoy 55
56 Learning Unclear how to model categories, so we learn what distinguishes them rather than manually specify the difference -- hence current interest in machine learning) Methods of training: generative vs. discriminative class de ensities p(x C 1 ) p(x C 2 ) posterior pro obabilities p(c 1 x) p(c 2 x) x x CS 484, Spring , Selim Aksoy 56
57 Learning Unclear how to model categories, so we learn what distinguishes them rather than manually specify the difference -- hence current interest in machine learning) What are you maximizing? Likelihood (Gen.) or performances on train/validation set (Disc.) Level of supervision Manual segmentation; bounding box; image labels; noisy labels Contains a motorbike CS 484, Spring , Selim Aksoy 57
58 Learning Unclear how to model categories, so we learn what distinguishes them rather than manually specify the difference -- hence current interest in machine learning) What are you maximizing? Likelihood (Gen.) or performances on train/validation set (Disc.) Level of supervision Manual segmentation; bounding box; image labels; noisy labels Batch/incremental (on category and image level; user-feedback ) CS 484, Spring , Selim Aksoy 58
59 Learning Unclear how to model categories, so we learn what distinguishes them rather than manually specify the difference -- hence current interest in machine learning) What are you maximizing? Likelihood (Gen.) or performances on train/validation set (Disc.) Level of supervision Manual segmentation; bounding box; image labels; noisy labels Batch/incremental (on category and image level; user-feedback ) Training images: Issue of overfitting Negative images for discriminative methods CS 484, Spring , Selim Aksoy 59
60 Learning Unclear how to model categories, so we learn what distinguishes them rather than manually specify the difference -- hence current interest in machine learning) What are you maximizing? Likelihood (Gen.) or performances on train/validation set (Disc.) Level of supervision Manual segmentation; bounding box; image labels; noisy labels Batch/incremental (on category and image level; user-feedback ) Training images: Issue of overfitting Negative images for discriminative methods Priors CS 484, Spring , Selim Aksoy 60


61 Recognition Scale / orientation range to search over Speed CS 484, Spring , Selim Aksoy 61
62 Object recognition using context The relationships between objects and the scene setting can be characterized in five ways: Interposition: objects interrupt their background Support: objects tend to rest on surfaces Probability: objects tend to be found in some contexts but not others Position: given an object is probable in a scene, it is often found in some positions and not others Familiar size: objects have a limited set of size relations with other objects CS 484, Spring , Selim Aksoy 62


63 Object recognition using context An ideal setting where the objects are perfectly segmented, the regions are classified, and the objects labels are refined with respect to semantic context in the image. (Rabinovich et al. Objects in Context, ICCV, 2007) CS 484, Spring , Selim Aksoy 63



64 Object recognition using context First column: segmentation results; second column: classification without contextual constraints; third column: classification with co-occurrence contextual constraints implemented using a conditional random field model. (Rabinovich et al. Objects in Context, ICCV, 2007) CS 484, Spring , Selim Aksoy 64



65 Object recognition using context better Using above below inside around relationships as spatial constraints better better worse First column: input image; second column: classification with co-occurrence contextual constraints; third column: classification with spatial and co-occurrence contextual constraints. (Galleguillos et al. Object Categorization using Co-Occurrence, Location and Appearance, CVPR, 2008) CS 484, Spring , Selim Aksoy 65

66 Object recognition using context Geometric context: learn labeling of the image into geometric classes such as support/ground (green), vertical planar (green) and sky (blue). The arrows show the direction that the vertical planar surface is facing. (Hoiem et al., Geometric Context from a Single Image, ICCV, 2005) CS 484, Spring , Selim Aksoy 66
 and pedestrian (b) detection by using only local")

67 Object recognition using context (a) (b) (c) (d) Putting objects in perspective: Car (a) and pedestrian (b) detection by using only local information. Car (c) and pedestrian (d) detection by using context. (Hoiem et al. Putting Objects in Perspective, CVPR, 2006) CS 484, Spring , Selim Aksoy 67

.")

68 Object recognition using context Contextual recognition by maximizing a scene probability function that incorporates outputs of individual object detectors (confidence values for assigned object labels) and pairwise interactions between objects (likelihood of pairwise spatial relationships). Left column: without using context; right column: with using context. (Firat Kalaycilar, An object recognition framework using contextual interactions among objects, M.S. Thesis, Bilkent University, 2009) CS 484, Spring , Selim Aksoy 68
INTRODUCTION TO PATTERN RECOGNITION
 INTRODUCTION TO PATTERN RECOGNITION 3 Introduction Our ability to recognize a face, to understand spoken words, to read handwritten characters all these abilities belong to the complex processes of pattern
INTRODUCTION TO PATTERN RECOGNITION 3 Introduction Our ability to recognize a face, to understand spoken words, to read handwritten characters all these abilities belong to the complex processes of pattern
Deakin Research Online
 Deakin Research Online This is the published version: Lazarescu, Mihai and Venkatesh, Svetha 2003, Using camera motion to identify different types of American football plays, in ICME 2003 : Proceedings
Deakin Research Online This is the published version: Lazarescu, Mihai and Venkatesh, Svetha 2003, Using camera motion to identify different types of American football plays, in ICME 2003 : Proceedings
Deformable Convolutional Networks
 Deformable Convolutional Networks -- MSRA COCO Detection & Segmentation Challenge 2017 Entry Jifeng Dai With Haozhi Qi*, Zheng Zhang, Bin Xiao, Han Hu, Bowen Cheng*, Yichen Wei Visual Computing Group Microsoft
Deformable Convolutional Networks -- MSRA COCO Detection & Segmentation Challenge 2017 Entry Jifeng Dai With Haozhi Qi*, Zheng Zhang, Bin Xiao, Han Hu, Bowen Cheng*, Yichen Wei Visual Computing Group Microsoft
Petacat: Applying ideas from Copycat to image understanding
 Petacat: Applying ideas from Copycat to image understanding How Streetscenes Works (Bileschi, 2006) 1. Densely tile the image with windows of different sizes. 2. HMAX C2 features are computed in each window.
Petacat: Applying ideas from Copycat to image understanding How Streetscenes Works (Bileschi, 2006) 1. Densely tile the image with windows of different sizes. 2. HMAX C2 features are computed in each window.
THe rip currents are very fast moving narrow channels,
 1 Rip Current Detection using Optical Flow Shweta Philip sphilip@ucsc.edu Abstract Rip currents are narrow currents of fast moving water that are strongest near the beach. These type of currents are dangerous
1 Rip Current Detection using Optical Flow Shweta Philip sphilip@ucsc.edu Abstract Rip currents are narrow currents of fast moving water that are strongest near the beach. These type of currents are dangerous
Introduction to Pattern Recognition
 Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 12 January 2009 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 12 January 2009 1 / 28 Pattern Recognition By Example Example:
Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 12 January 2009 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 12 January 2009 1 / 28 Pattern Recognition By Example Example:
Predicting Human Behavior from Public Cameras with Convolutional Neural Networks
 Comenius University in Bratislava Faculty of Mathematics, Physics and Informatics Predicting Human Behavior from Public Cameras with Convolutional Neural Networks Master thesis 2016 Ondrej Jariabka Comenius
Comenius University in Bratislava Faculty of Mathematics, Physics and Informatics Predicting Human Behavior from Public Cameras with Convolutional Neural Networks Master thesis 2016 Ondrej Jariabka Comenius
Recognition of Tennis Strokes using Key Postures
 ISSC 2010, UCC, Cork, June 23 24 Recognition of Tennis Strokes using Key Postures Damien Connaghan, Ciarán Ó Conaire, Philip Kelly, Noel E. O Connor CLARITY: Centre for Sensor Web Technologies Dublin City
ISSC 2010, UCC, Cork, June 23 24 Recognition of Tennis Strokes using Key Postures Damien Connaghan, Ciarán Ó Conaire, Philip Kelly, Noel E. O Connor CLARITY: Centre for Sensor Web Technologies Dublin City
Game, Shot and Match: Event-based Indexing of Tennis
 Game, Shot and Match: Event-based Indexing of Tennis Damien Connaghan, Philip Kelly and Noel E. O Connor CLARITY: Centre for Sensor Web Technologies Dublin City University Dublin 9, Ireland connagha@eeng.dcu.ie
Game, Shot and Match: Event-based Indexing of Tennis Damien Connaghan, Philip Kelly and Noel E. O Connor CLARITY: Centre for Sensor Web Technologies Dublin City University Dublin 9, Ireland connagha@eeng.dcu.ie
Pedestrian Protection System for ADAS using ARM 9
 Pedestrian Protection System for ADAS using ARM 9 Rajashri Sanatkumar Dixit S.T. Gandhe Pravin Dhulekar ABSTRACT We developed pedestrian protection system by using haar cascade algorithm with Friendly
Pedestrian Protection System for ADAS using ARM 9 Rajashri Sanatkumar Dixit S.T. Gandhe Pravin Dhulekar ABSTRACT We developed pedestrian protection system by using haar cascade algorithm with Friendly
Automated Proactive Road Safety Analysis
 Transportation Research At McGill Seminar Nicolas Saunier nicolas.saunier@polymtl.ca November 25 th 2010 Outline 1 2 for 3 using Video Data 4 Using Microscopic Data 5 A World Health Issue Over 1.2 million
Transportation Research At McGill Seminar Nicolas Saunier nicolas.saunier@polymtl.ca November 25 th 2010 Outline 1 2 for 3 using Video Data 4 Using Microscopic Data 5 A World Health Issue Over 1.2 million
1.1 The size of the search space Modeling the problem Change over time Constraints... 21
 Introduction : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1 I What Are the Ages of My Three Sons? : : : : : : : : : : : : : : : : : 9 1 Why Are Some Problems Dicult to Solve? : : :
Introduction : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1 I What Are the Ages of My Three Sons? : : : : : : : : : : : : : : : : : 9 1 Why Are Some Problems Dicult to Solve? : : :
Safety Assessment of Installing Traffic Signals at High-Speed Expressway Intersections
 Safety Assessment of Installing Traffic Signals at High-Speed Expressway Intersections Todd Knox Center for Transportation Research and Education Iowa State University 2901 South Loop Drive, Suite 3100
Safety Assessment of Installing Traffic Signals at High-Speed Expressway Intersections Todd Knox Center for Transportation Research and Education Iowa State University 2901 South Loop Drive, Suite 3100
Self-Driving Vehicles That (Fore) See
 See") Self-Driving Vehicles That (Fore) See Dariu M. Gavrila Intelligent Vehicles, TU Delft Berlin Tech.AD, March 5, 2018 Personal Introduction: Dariu M. Gavrila Born in Cluj (Romania) 1990 Doktoraal Degree
Self-Driving Vehicles That (Fore) See Dariu M. Gavrila Intelligent Vehicles, TU Delft Berlin Tech.AD, March 5, 2018 Personal Introduction: Dariu M. Gavrila Born in Cluj (Romania) 1990 Doktoraal Degree
Performance of Fully Automated 3D Cracking Survey with Pixel Accuracy based on Deep Learning
 Performance of Fully Automated 3D Cracking Survey with Pixel Accuracy based on Deep Learning Kelvin C.P. Wang Oklahoma State University and WayLink Systems Corp. 2017-10-19, Copenhagen, Denmark European
Performance of Fully Automated 3D Cracking Survey with Pixel Accuracy based on Deep Learning Kelvin C.P. Wang Oklahoma State University and WayLink Systems Corp. 2017-10-19, Copenhagen, Denmark European
Modelling Approaches and Results of the FHDO Biomedical Computer Science Group at ImageCLEF 2015 Medical Classification Task
 Modelling Approaches and Results of the FHDO Biomedical Computer Science Group at ImageCLEF 2015 Medical Classification Task Obioma Pelka Christoph M. Friedrich University of Applied Sciences and Arts
Modelling Approaches and Results of the FHDO Biomedical Computer Science Group at ImageCLEF 2015 Medical Classification Task Obioma Pelka Christoph M. Friedrich University of Applied Sciences and Arts
Published in: IEEE Conference on Advanced Video and Signal Based Surveillance, AVSS 2007
 Aalborg Universitet Classification of Gait Types Based on the Duty-factor Fihl, Preben; Moeslund, Thomas B. Published in: IEEE Conference on Advanced Video and Signal Based Surveillance, 2007. AVSS 2007
Aalborg Universitet Classification of Gait Types Based on the Duty-factor Fihl, Preben; Moeslund, Thomas B. Published in: IEEE Conference on Advanced Video and Signal Based Surveillance, 2007. AVSS 2007
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
D-Case Modeling Guide for Target System
 D-Case Modeling Guide for Target System 1/32 Table of Contents 1 Scope...4 2 Overview of D-Case and SysML Modeling Guide...4 2.1 Background and Purpose...4 2.2 Target System of Modeling Guide...5 2.3 Constitution
D-Case Modeling Guide for Target System 1/32 Table of Contents 1 Scope...4 2 Overview of D-Case and SysML Modeling Guide...4 2.1 Background and Purpose...4 2.2 Target System of Modeling Guide...5 2.3 Constitution
Cricket umpire assistance and ball tracking system using a single smartphone camera
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 Cricket umpire assistance and ball tracking system using a single smartphone camera Udit Arora
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 Cricket umpire assistance and ball tracking system using a single smartphone camera Udit Arora
JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts
 JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts Jan Kodovský, Jessica Fridrich May 16, 2012 / IH Conference 1 / 19 What is JPEG-compatibility steganalysis? Detects embedding
JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts Jan Kodovský, Jessica Fridrich May 16, 2012 / IH Conference 1 / 19 What is JPEG-compatibility steganalysis? Detects embedding
Visual Traffic Jam Analysis Based on Trajectory Data
 Visual Traffic Jam Analysis Based on Trajectory Data Zuchao Wang, Min Lu, Xiaoru Yuan, Peking University Junping Zhang, Fudan University Huub van de Wetering, Technische Universiteit Eindhoven Introduction
Visual Traffic Jam Analysis Based on Trajectory Data Zuchao Wang, Min Lu, Xiaoru Yuan, Peking University Junping Zhang, Fudan University Huub van de Wetering, Technische Universiteit Eindhoven Introduction
Chapter 5 DATA COLLECTION FOR TRANSPORTATION SAFETY STUDIES
 Chapter 5 DATA COLLECTION FOR TRANSPORTATION SAFETY STUDIES 5.1 PURPOSE (1) The purpose of the Traffic Safety Studies chapter is to provide guidance on the data collection requirements for conducting a
Chapter 5 DATA COLLECTION FOR TRANSPORTATION SAFETY STUDIES 5.1 PURPOSE (1) The purpose of the Traffic Safety Studies chapter is to provide guidance on the data collection requirements for conducting a
SIDRA INTERSECTION 6.1 UPDATE HISTORY
 Akcelik & Associates Pty Ltd PO Box 1075G, Greythorn, Vic 3104 AUSTRALIA ABN 79 088 889 687 For all technical support, sales support and general enquiries: support.sidrasolutions.com SIDRA INTERSECTION
Akcelik & Associates Pty Ltd PO Box 1075G, Greythorn, Vic 3104 AUSTRALIA ABN 79 088 889 687 For all technical support, sales support and general enquiries: support.sidrasolutions.com SIDRA INTERSECTION
HIGH RESOLUTION DEPTH IMAGE RECOVERY ALGORITHM USING GRAYSCALE IMAGE.
 HIGH RESOLUTION DEPTH IMAGE RECOVERY ALGORITHM USING GRAYSCALE IMAGE Kazunori Uruma 1, Katsumi Konishi 2, Tomohiro Takahashi 1 and Toshihiro Furukawa 1 1 Graduate School of Engineering, Tokyo University
HIGH RESOLUTION DEPTH IMAGE RECOVERY ALGORITHM USING GRAYSCALE IMAGE Kazunori Uruma 1, Katsumi Konishi 2, Tomohiro Takahashi 1 and Toshihiro Furukawa 1 1 Graduate School of Engineering, Tokyo University
4. Learning Pedestrian Models
 Learning Pedestrian Models for Silhouette Refinement L. Lee G. Dalley K. Tieu Massachusettes Institute of Technology Artificial Intelligence Laboratory {llee, dalleyg, tieu}@ai.mit.edu Abstract We present
Learning Pedestrian Models for Silhouette Refinement L. Lee G. Dalley K. Tieu Massachusettes Institute of Technology Artificial Intelligence Laboratory {llee, dalleyg, tieu}@ai.mit.edu Abstract We present
FACE DETECTION. Lab on Project Based Learning May Xin Huang, Mark Ison, Daniel Martínez Visual Perception
 FACE DETECTION Lab on Project Based Learning May 2011 Xin Huang, Mark Ison, Daniel Martínez Visual Perception Contents Introduction Exploration into local invariant features The final method Results Conclusions
FACE DETECTION Lab on Project Based Learning May 2011 Xin Huang, Mark Ison, Daniel Martínez Visual Perception Contents Introduction Exploration into local invariant features The final method Results Conclusions
knn & Naïve Bayes Hongning Wang
 knn & Naïve Bayes Hongning Wang CS@UVa Today s lecture Instance-based classifiers k nearest neighbors Non-parametric learning algorithm Model-based classifiers Naïve Bayes classifier A generative model
knn & Naïve Bayes Hongning Wang CS@UVa Today s lecture Instance-based classifiers k nearest neighbors Non-parametric learning algorithm Model-based classifiers Naïve Bayes classifier A generative model
Introduction to Pattern Recognition
 Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 19 January 2011 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 19 January 2011 1 / 32 Examples of Pattern Recognition in
Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 19 January 2011 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 19 January 2011 1 / 32 Examples of Pattern Recognition in
Capacity and Level of Service LOS
 Chapter 21 Capacity and Level of Service LOS 21.1 Introduction Often it is required to ascertain how much a transport facility can accommodate. Such information is useful in the design of traffic facility.
Chapter 21 Capacity and Level of Service LOS 21.1 Introduction Often it is required to ascertain how much a transport facility can accommodate. Such information is useful in the design of traffic facility.
Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs
 Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs Jehyun Cho a, Ghang Lee a, Jongsung Won a and Eunseo Ryu a a Dept. of Architectural Engineering, University of Yonsei,
Application of Dijkstra s Algorithm in the Evacuation System Utilizing Exit Signs Jehyun Cho a, Ghang Lee a, Jongsung Won a and Eunseo Ryu a a Dept. of Architectural Engineering, University of Yonsei,
LABORATORY EXERCISE 1 CONTROL VALVE CHARACTERISTICS
 Date: Name: LABORATORY EXERCISE 1 CONTROL VALVE CHARACTERISTICS OBJECTIVE: To demonstrate the relation between valve stem position and the fluid flow through a control valve, for both linear and equal
Date: Name: LABORATORY EXERCISE 1 CONTROL VALVE CHARACTERISTICS OBJECTIVE: To demonstrate the relation between valve stem position and the fluid flow through a control valve, for both linear and equal
Title: 4-Way-Stop Wait-Time Prediction Group members (1): David Held
: David Held") Title: 4-Way-Stop Wait-Time Prediction Group members (1): David Held As part of my research in Sebastian Thrun's autonomous driving team, my goal is to predict the wait-time for a car at a 4-way intersection.
Title: 4-Way-Stop Wait-Time Prediction Group members (1): David Held As part of my research in Sebastian Thrun's autonomous driving team, my goal is to predict the wait-time for a car at a 4-way intersection.
View-invariant Estimation of Height and Stride for Gait Recognition
 View-invariant Estimation of Height and Stride for Gait Recognition Chiraz BenAbdelkaderÝ, Ross CutlerÞ, and Larry DavisÝ Ý University of Maryland, College Park chiraz,lsd@umiacs.umd.edu ÞMicrosoft Research
View-invariant Estimation of Height and Stride for Gait Recognition Chiraz BenAbdelkaderÝ, Ross CutlerÞ, and Larry DavisÝ Ý University of Maryland, College Park chiraz,lsd@umiacs.umd.edu ÞMicrosoft Research
Universal Style Transfer via Feature Transforms
 Universal Style Transfer via Feature Transforms Yijun Li, Chen Fang, Jimei Yang, Zhaowen Wang, Xin Lu, Ming-Hsuan Yang UC Merced, Adobe Research, NVIDIA Research Presented: Dong Wang (Refer to slides by
Universal Style Transfer via Feature Transforms Yijun Li, Chen Fang, Jimei Yang, Zhaowen Wang, Xin Lu, Ming-Hsuan Yang UC Merced, Adobe Research, NVIDIA Research Presented: Dong Wang (Refer to slides by
Vision Zero High Injury Network Methodology
 Vision Zero High Injury Network Methodology DATA SETS USED: 1. Reportable crashes in Philadelphia from 2012-2016, available as open data through PennDOT 2. Street Centerline geographic layer, maintained
Vision Zero High Injury Network Methodology DATA SETS USED: 1. Reportable crashes in Philadelphia from 2012-2016, available as open data through PennDOT 2. Street Centerline geographic layer, maintained
Generation of See-Through Baseball Movie from Multi-Camera Views
 Generation of See-Through Baseball Movie from Multi-Camera Views Takanori Hashimoto #1, Yuko Uematsu #2, Hideo Saito #3 # Keio University 3-14-1 Hiyoshi, Kohoku-ku, Yokohama, 223-8522 Japan 1 takanori@hvrl.ics.keio.ac.jp
Generation of See-Through Baseball Movie from Multi-Camera Views Takanori Hashimoto #1, Yuko Uematsu #2, Hideo Saito #3 # Keio University 3-14-1 Hiyoshi, Kohoku-ku, Yokohama, 223-8522 Japan 1 takanori@hvrl.ics.keio.ac.jp
FEATURES. Features. UCI Machine Learning Repository. Admin 9/23/13
 Admin Assignment 2 This class will make you a better programmer! How did it go? How much time did you spend? FEATURES David Kauchak CS 451 Fall 2013 Assignment 3 out Implement perceptron variants See how
Admin Assignment 2 This class will make you a better programmer! How did it go? How much time did you spend? FEATURES David Kauchak CS 451 Fall 2013 Assignment 3 out Implement perceptron variants See how
Supplementary Material for Bayes Merging of Multiple Vocabularies for Scalable Image Retrieval
 Supplementary Material for Bayes Merging of Multiple Vocabularies for Scalable Image Retrieval 1. Overview This document includes supplementary material to Bayes Merging of Multiple Vocabularies for Scalable
Supplementary Material for Bayes Merging of Multiple Vocabularies for Scalable Image Retrieval 1. Overview This document includes supplementary material to Bayes Merging of Multiple Vocabularies for Scalable
A New Benchmark for Vison-Based Cyclist Detection
 2016 IEEE Intelligent Vehicles Symposium (IV) Gothenburg, Sweden, June 19-22, 2016 A New Benchmark for Vison-Based Cyclist Detection Xiaofei Li 1, Fabian Flohr 2,3, Yue Yang 4, Hui Xiong 5,1, Markus Braun
2016 IEEE Intelligent Vehicles Symposium (IV) Gothenburg, Sweden, June 19-22, 2016 A New Benchmark for Vison-Based Cyclist Detection Xiaofei Li 1, Fabian Flohr 2,3, Yue Yang 4, Hui Xiong 5,1, Markus Braun
A computer program that improves its performance at some task through experience.
 1 A computer program that improves its performance at some task through experience. 2 Example: Learn to Diagnose Patients T: Diagnose tumors from images P: Percent of patients correctly diagnosed E: Pre
1 A computer program that improves its performance at some task through experience. 2 Example: Learn to Diagnose Patients T: Diagnose tumors from images P: Percent of patients correctly diagnosed E: Pre
CS145: INTRODUCTION TO DATA MINING
 CS145: INTRODUCTION TO DATA MINING 3: Vector Data: Logistic Regression Instructor: Yizhou Sun yzsun@cs.ucla.edu October 9, 2017 Methods to Learn Vector Data Set Data Sequence Data Text Data Classification
CS145: INTRODUCTION TO DATA MINING 3: Vector Data: Logistic Regression Instructor: Yizhou Sun yzsun@cs.ucla.edu October 9, 2017 Methods to Learn Vector Data Set Data Sequence Data Text Data Classification
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Commonsense Knowledge Acquisition and Applications
 Commonsense Knowledge Acquisition and Applications Towards Commonsense Enriched Machines Niket Tandon Ph.D. Supervisor: Gerhard Weikum Max Planck Institute for Informatics 2 Hard Rock property brown Hand,
Commonsense Knowledge Acquisition and Applications Towards Commonsense Enriched Machines Niket Tandon Ph.D. Supervisor: Gerhard Weikum Max Planck Institute for Informatics 2 Hard Rock property brown Hand,
Beach Cities Living Streets Design Manual and Aviation Boulevard Multimodal Corridor Plan
 Beach Cities Living Streets Design Manual and Aviation Boulevard Multimodal Corridor Plan AGENDA 1 Introductions & Project Scope 2 Public Outreach Recap 3 Living Streets Design Manual 4 Aviation Boulevard
Beach Cities Living Streets Design Manual and Aviation Boulevard Multimodal Corridor Plan AGENDA 1 Introductions & Project Scope 2 Public Outreach Recap 3 Living Streets Design Manual 4 Aviation Boulevard
Design of a Pedestrian Detection System Based on OpenCV. Ning Xu and Yong Ren*
 International Conference on Education, Management, Commerce and Society (EMCS 2015) Design of a Pedestrian Detection System Based on OpenCV Ning Xu and Yong Ren* Applied Technology College of Soochow University
International Conference on Education, Management, Commerce and Society (EMCS 2015) Design of a Pedestrian Detection System Based on OpenCV Ning Xu and Yong Ren* Applied Technology College of Soochow University
Analysis of Variance. Copyright 2014 Pearson Education, Inc.
 Analysis of Variance 12-1 Learning Outcomes Outcome 1. Understand the basic logic of analysis of variance. Outcome 2. Perform a hypothesis test for a single-factor design using analysis of variance manually
Analysis of Variance 12-1 Learning Outcomes Outcome 1. Understand the basic logic of analysis of variance. Outcome 2. Perform a hypothesis test for a single-factor design using analysis of variance manually
Open Research Online The Open University s repository of research publications and other research outputs
 Open Research Online The Open University s repository of research publications and other research outputs Developing an intelligent table tennis umpiring system Conference or Workshop Item How to cite:
Open Research Online The Open University s repository of research publications and other research outputs Developing an intelligent table tennis umpiring system Conference or Workshop Item How to cite:
Fine-grained Walking Activity Recognition via Driving Recorder Dataset
 Fine-grained Walking Activity Recognition via Driving Recorder Dataset Hirokatsu Kataoka (AIST), Yoshimitsu Aoki (Keio Univ.), Yutaka Satoh (AIST) Shoko Oikawa (NTSEL), Yasuhiro Matsui (NTSEL) Email: hirokatsu.kataoka@aist.go.jp
Fine-grained Walking Activity Recognition via Driving Recorder Dataset Hirokatsu Kataoka (AIST), Yoshimitsu Aoki (Keio Univ.), Yutaka Satoh (AIST) Shoko Oikawa (NTSEL), Yasuhiro Matsui (NTSEL) Email: hirokatsu.kataoka@aist.go.jp
A Bag-of-Gait Model for Gait Recognition
 A Bag-of-Gait Model for Gait Recognition Jianzhao Qin, T. Luo, W. Shao, R. H. Y. Chung and K. P. Chow The Department of Computer Science, The University of Hong Kong, Hong Kong, China Abstract In this
A Bag-of-Gait Model for Gait Recognition Jianzhao Qin, T. Luo, W. Shao, R. H. Y. Chung and K. P. Chow The Department of Computer Science, The University of Hong Kong, Hong Kong, China Abstract In this
Fine-Grain Annotation of Cricket Videos
 Fine-Grain Annotation of Cricket Videos Rahul Anand Sharma CVIT, IIIT-Hyderabad Hyderabad, India rahul.anand@research.iiit.ac.in Pramod Sankar K. Xerox Research Center India Bengaluru, India pramod.kompalli@xerox.com
Fine-Grain Annotation of Cricket Videos Rahul Anand Sharma CVIT, IIIT-Hyderabad Hyderabad, India rahul.anand@research.iiit.ac.in Pramod Sankar K. Xerox Research Center India Bengaluru, India pramod.kompalli@xerox.com
Recognizing Human Gait Types 183
 Recognizing Human Gait Types 183 11 X Recognizing Human Gait Types Preben Fihl and Thomas B. Moeslund Aalborg University Denmark 1. Introduction Everyday people will observe, analyze, and interpret the
Recognizing Human Gait Types 183 11 X Recognizing Human Gait Types Preben Fihl and Thomas B. Moeslund Aalborg University Denmark 1. Introduction Everyday people will observe, analyze, and interpret the
Assistive guidance system for the visually impaired Rohit Takhar 1, Tushar Sharma 1, Udit Arora 1, Sohit Verma 1 1
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 Assistive guidance system for the visually impaired Rohit Takhar 1, Tushar
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 Assistive guidance system for the visually impaired Rohit Takhar 1, Tushar
#19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS
 #19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS Final Research Report Luis E. Navarro-Serment, Ph.D. The Robotics Institute Carnegie Mellon University November 25, 2018. Disclaimer
#19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS Final Research Report Luis E. Navarro-Serment, Ph.D. The Robotics Institute Carnegie Mellon University November 25, 2018. Disclaimer
Using Perceptual Context to Ground Language
 Using Perceptual Context to Ground Language David Chen Joint work with Joohyun Kim, Raymond Mooney Department of Computer Sciences, University of Texas at Austin 2009 IBM Statistical Machine Learning and
Using Perceptual Context to Ground Language David Chen Joint work with Joohyun Kim, Raymond Mooney Department of Computer Sciences, University of Texas at Austin 2009 IBM Statistical Machine Learning and
Active Pedestrian Safety: from Research to Reality
 Active Pedestrian Safety: from Research to Reality Dariu M. Gavrila Environment Perception Research and Development Oxford University, 04-10-2013 We originally thought Machine Intelligence would look like
Active Pedestrian Safety: from Research to Reality Dariu M. Gavrila Environment Perception Research and Development Oxford University, 04-10-2013 We originally thought Machine Intelligence would look like
Deconstructing Data Science
 Deconstructing Data Science David Bamman, UC Berkele Info 29 Lecture 4: Regression overview Jan 26, 217 Regression A mapping from input data (drawn from instance space ) to a point in R (R = the set of
Deconstructing Data Science David Bamman, UC Berkele Info 29 Lecture 4: Regression overview Jan 26, 217 Regression A mapping from input data (drawn from instance space ) to a point in R (R = the set of
Rural Highway Overtaking Lanes
 Rural Highway Overtaking Lanes Kah Wai Ng School of Civil and Resource Engineering, University of Western Australia Song Wang School of Mathematics and Statistics, University of Western Australia Doina
Rural Highway Overtaking Lanes Kah Wai Ng School of Civil and Resource Engineering, University of Western Australia Song Wang School of Mathematics and Statistics, University of Western Australia Doina
FAULT DIAGNOSIS IN DEAERATOR USING FUZZY LOGIC
 Fault diagnosis in deaerator using fuzzy logic 19 FAULT DIAGNOSIS IN DEAERATOR USING FUZZY LOGIC S.Srinivasan 1), P.Kanagasabapathy 1), N.Selvaganesan 2) 1) Department of Instrumentation Engineering, MIT
Fault diagnosis in deaerator using fuzzy logic 19 FAULT DIAGNOSIS IN DEAERATOR USING FUZZY LOGIC S.Srinivasan 1), P.Kanagasabapathy 1), N.Selvaganesan 2) 1) Department of Instrumentation Engineering, MIT
NBA Plays. Mitchell Kates. at the. September 2014
 Player Motion Analysis: Automatically Classifying NBA Plays by Mitchell Kates Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the
Player Motion Analysis: Automatically Classifying NBA Plays by Mitchell Kates Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the
At each type of conflict location, the risk is affected by certain parameters:
 TN001 April 2016 The separated cycleway options tool (SCOT) was developed to partially address some of the gaps identified in Stage 1 of the Cycling Network Guidance project relating to separated cycleways.
TN001 April 2016 The separated cycleway options tool (SCOT) was developed to partially address some of the gaps identified in Stage 1 of the Cycling Network Guidance project relating to separated cycleways.
Predicting Horse Racing Results with Machine Learning
 Predicting Horse Racing Results with Machine Learning LYU 1703 LIU YIDE 1155062194 Supervisor: Professor Michael R. Lyu Outline Recap of last semester Object of this semester Data Preparation Set to sequence
Predicting Horse Racing Results with Machine Learning LYU 1703 LIU YIDE 1155062194 Supervisor: Professor Michael R. Lyu Outline Recap of last semester Object of this semester Data Preparation Set to sequence
Gait Analysis for Recognition and Classification
 Gait Analysis for Recognition and Classification L. Lee W. E. L. Grimson MIT Artificial Intelligence Lab Cambridge, MA 0239 Abstract This paper describes a representation of gait appearance for the purpose
Gait Analysis for Recognition and Classification L. Lee W. E. L. Grimson MIT Artificial Intelligence Lab Cambridge, MA 0239 Abstract This paper describes a representation of gait appearance for the purpose
The Application of Pedestrian Microscopic Simulation Technology in Researching the Influenced Realm around Urban Rail Transit Station
 Journal of Traffic and Transportation Engineering 4 (2016) 242-246 doi: 10.17265/2328-2142/2016.05.002 D DAVID PUBLISHING The Application of Pedestrian Microscopic Simulation Technology in Researching
Journal of Traffic and Transportation Engineering 4 (2016) 242-246 doi: 10.17265/2328-2142/2016.05.002 D DAVID PUBLISHING The Application of Pedestrian Microscopic Simulation Technology in Researching
Chapter 6. Analysis of the framework with FARS Dataset
 Chapter 6 Analysis of the framework with FARS Dataset. Having represented each phase of the structure with the aid of different data sets at each stage, to support the efficacy of the proposed framework
Chapter 6 Analysis of the framework with FARS Dataset. Having represented each phase of the structure with the aid of different data sets at each stage, to support the efficacy of the proposed framework
Finding your feet: modelling the batting abilities of cricketers using Gaussian processes
 Finding your feet: modelling the batting abilities of cricketers using Gaussian processes Oliver Stevenson & Brendon Brewer PhD candidate, Department of Statistics, University of Auckland o.stevenson@auckland.ac.nz
Finding your feet: modelling the batting abilities of cricketers using Gaussian processes Oliver Stevenson & Brendon Brewer PhD candidate, Department of Statistics, University of Auckland o.stevenson@auckland.ac.nz
Naïve Bayes. Robot Image Credit: Viktoriya Sukhanova 123RF.com
 Naïve Bayes These slides were assembled by Eric Eaton, with grateful acknowledgement of the many others who made their course materials freely available online. Feel free to reuse or adapt these slides
Naïve Bayes These slides were assembled by Eric Eaton, with grateful acknowledgement of the many others who made their course materials freely available online. Feel free to reuse or adapt these slides
Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings
 Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings Objectives The goal of this study is to advance the state of the art in understanding
Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings Objectives The goal of this study is to advance the state of the art in understanding
Queue analysis for the toll station of the Öresund fixed link. Pontus Matstoms *
 Queue analysis for the toll station of the Öresund fixed link Pontus Matstoms * Abstract A new simulation model for queue and capacity analysis of a toll station is presented. The model and its software
Queue analysis for the toll station of the Öresund fixed link Pontus Matstoms * Abstract A new simulation model for queue and capacity analysis of a toll station is presented. The model and its software
Human Pose Tracking III: Dynamics. David Fleet University of Toronto
 Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
EEC 686/785 Modeling & Performance Evaluation of Computer Systems. Lecture 6. Wenbing Zhao. Department of Electrical and Computer Engineering
 EEC 686/785 Modeling & Performance Evaluation of Computer Systems Lecture 6 Department of Electrical and Computer Engineering Cleveland State University wenbing@ieee.org Outline 2 Review of lecture 5 The
EEC 686/785 Modeling & Performance Evaluation of Computer Systems Lecture 6 Department of Electrical and Computer Engineering Cleveland State University wenbing@ieee.org Outline 2 Review of lecture 5 The
Software Reliability 1
 Software Reliability 1 Software Reliability What is software reliability? the probability of failure-free software operation for a specified period of time in a specified environment input sw output We
Software Reliability 1 Software Reliability What is software reliability? the probability of failure-free software operation for a specified period of time in a specified environment input sw output We
Bayesian Optimized Random Forest for Movement Classification with Smartphones
 Bayesian Optimized Random Forest for Movement Classification with Smartphones 1 2 3 4 Anonymous Author(s) Affiliation Address email 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
Bayesian Optimized Random Forest for Movement Classification with Smartphones 1 2 3 4 Anonymous Author(s) Affiliation Address email 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
Currents measurements in the coast of Montevideo, Uruguay
 Currents measurements in the coast of Montevideo, Uruguay M. Fossati, D. Bellón, E. Lorenzo & I. Piedra-Cueva Fluid Mechanics and Environmental Engineering Institute (IMFIA), School of Engineering, Research
Currents measurements in the coast of Montevideo, Uruguay M. Fossati, D. Bellón, E. Lorenzo & I. Piedra-Cueva Fluid Mechanics and Environmental Engineering Institute (IMFIA), School of Engineering, Research
Introduction to topological data analysis
 Introduction to topological data analysis Ippei Obayashi Adavnced Institute for Materials Research, Tohoku University Jan. 12, 2018 I. Obayashi (AIMR (Tohoku U.)) Introduction to TDA Jan. 12, 2018 1 /
Introduction to topological data analysis Ippei Obayashi Adavnced Institute for Materials Research, Tohoku University Jan. 12, 2018 I. Obayashi (AIMR (Tohoku U.)) Introduction to TDA Jan. 12, 2018 1 /
Outline. Terminology. EEC 686/785 Modeling & Performance Evaluation of Computer Systems. Lecture 6. Steps in Capacity Planning and Management
 EEC 686/785 Modeling & Performance Evaluation of Computer Systems Lecture 6 Department of Electrical and Computer Engineering Cleveland State University wenbing@ieee.org Outline Review of lecture 5 The
EEC 686/785 Modeling & Performance Evaluation of Computer Systems Lecture 6 Department of Electrical and Computer Engineering Cleveland State University wenbing@ieee.org Outline Review of lecture 5 The
Introduction to Highway Safety Course
 Introduction to Highway Safety Course Introduction to Crash Analysis Prepared by Robert K. Seyfried, PE, PTOE Northwestern University Center for Public Safety Introduction to Highway Safety Series Course
Introduction to Highway Safety Course Introduction to Crash Analysis Prepared by Robert K. Seyfried, PE, PTOE Northwestern University Center for Public Safety Introduction to Highway Safety Series Course
Transformer fault diagnosis using Dissolved Gas Analysis technology and Bayesian networks
 Proceedings of the 4th International Conference on Systems and Control, Sousse, Tunisia, April 28-30, 2015 TuCA.2 Transformer fault diagnosis using Dissolved Gas Analysis technology and Bayesian networks
Proceedings of the 4th International Conference on Systems and Control, Sousse, Tunisia, April 28-30, 2015 TuCA.2 Transformer fault diagnosis using Dissolved Gas Analysis technology and Bayesian networks
PREDICTING the outcomes of sporting events
 CS 229 FINAL PROJECT, AUTUMN 2014 1 Predicting National Basketball Association Winners Jasper Lin, Logan Short, and Vishnu Sundaresan Abstract We used National Basketball Associations box scores from 1991-1998
CS 229 FINAL PROJECT, AUTUMN 2014 1 Predicting National Basketball Association Winners Jasper Lin, Logan Short, and Vishnu Sundaresan Abstract We used National Basketball Associations box scores from 1991-1998
Pedestrian traffic flow operations on a platform: observations and comparison with simulation tool SimPed
 Pedestrian traffic flow operations on a platform: observations and comparison with simulation tool SimPed W. Daamen & S. P. Hoogendoorn Department Transport & Planning, Delft University of Technology,
Pedestrian traffic flow operations on a platform: observations and comparison with simulation tool SimPed W. Daamen & S. P. Hoogendoorn Department Transport & Planning, Delft University of Technology,
Reliability of Safety-Critical Systems Chapter 3. Failures and Failure Analysis
 Reliability of Safety-Critical Systems Chapter 3. Failures and Failure Analysis Mary Ann Lundteigen and Marvin Rausand mary.a.lundteigen@ntnu.no RAMS Group Department of Production and Quality Engineering
Reliability of Safety-Critical Systems Chapter 3. Failures and Failure Analysis Mary Ann Lundteigen and Marvin Rausand mary.a.lundteigen@ntnu.no RAMS Group Department of Production and Quality Engineering
Naïve Bayes. Robot Image Credit: Viktoriya Sukhanova 123RF.com
 Naïve Bayes These slides were assembled by Byron Boots, with only minor modifications from Eric Eaton s slides and grateful acknowledgement to the many others who made their course materials freely available
Naïve Bayes These slides were assembled by Byron Boots, with only minor modifications from Eric Eaton s slides and grateful acknowledgement to the many others who made their course materials freely available
NEIGHBORHOOD TRAFFIC CALMING POLICY
 NEIGHBORHOOD TRAFFIC CALMING POLICY I. PURPOSE The City of Kent continually strives to strengthen and protect its neighborhoods by improving the quality of life in residential areas. Traffic conditions
NEIGHBORHOOD TRAFFIC CALMING POLICY I. PURPOSE The City of Kent continually strives to strengthen and protect its neighborhoods by improving the quality of life in residential areas. Traffic conditions
A Trajectory-Based Analysis of Coordinated Team Activity in Basketball Game
 A Trajectory-Based Analysis of Coordinated Team Activity in Basketball Game Matej Perše, Matej Kristan, Stanislav Kovačič, Janez Perš Faculty of Electrical Engineering, University of Ljubljana, Tržaška
A Trajectory-Based Analysis of Coordinated Team Activity in Basketball Game Matej Perše, Matej Kristan, Stanislav Kovačič, Janez Perš Faculty of Electrical Engineering, University of Ljubljana, Tržaška
A SYSTEM FOR THE AUTOMATIC ANNOTATION OF TENNIS MATCHES. W.J. Christmas, A. Kostin, F. Yan, I. Kolonias and J. Kittler
 A SYSTEM FOR THE AUTOMATIC ANNOTATION OF TENNIS MATCHES W.J. Christmas, A. Kostin, F. Yan, I. Kolonias and J. Kittler Centre for Vision, Speech and Signal Processing University of Surrey, Guildford, GU2
A SYSTEM FOR THE AUTOMATIC ANNOTATION OF TENNIS MATCHES W.J. Christmas, A. Kostin, F. Yan, I. Kolonias and J. Kittler Centre for Vision, Speech and Signal Processing University of Surrey, Guildford, GU2
Obtain a Simulation Model of a Pedestrian Collision Imminent Braking System Based on the Vehicle Testing Data
 Obtain a Simulation Model of a Pedestrian Collision Imminent Braking System Based on the Vehicle Testing Data Bo Tang, Stanley Chien, and Yaobin Chen Transportation Active Safety Institute Indiana University-Purdue
Obtain a Simulation Model of a Pedestrian Collision Imminent Braking System Based on the Vehicle Testing Data Bo Tang, Stanley Chien, and Yaobin Chen Transportation Active Safety Institute Indiana University-Purdue
Application of Bayesian Networks to Shopping Assistance
 Application of Bayesian Networks to Shopping Assistance Yang Xiang, Chenwen Ye, and Deborah Ann Stacey University of Guelph, CANADA Abstract. We develop an on-line shopping assistant that can help a e-shopper
Application of Bayesian Networks to Shopping Assistance Yang Xiang, Chenwen Ye, and Deborah Ann Stacey University of Guelph, CANADA Abstract. We develop an on-line shopping assistant that can help a e-shopper
Questions & Answers About the Operate within Operate within IROLs Standard
 Index: Introduction to Standard...3 Expansion on Definitions...5 Questions and Answers...9 Who needs to comply with this standard?...9 When does compliance with this standard start?...10 For a System Operator
Index: Introduction to Standard...3 Expansion on Definitions...5 Questions and Answers...9 Who needs to comply with this standard?...9 When does compliance with this standard start?...10 For a System Operator
A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data
 A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data Ting Fu Supervisor: Luis Miranda-Moreno, Nicolas Saunier Ting FU Outline 1. Motivation & Literature Review
A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data Ting Fu Supervisor: Luis Miranda-Moreno, Nicolas Saunier Ting FU Outline 1. Motivation & Literature Review
5.1 Introduction. Learning Objectives
 Learning Objectives 5.1 Introduction Statistical Process Control (SPC): SPC is a powerful collection of problem-solving tools useful in achieving process stability and improving capability through the
Learning Objectives 5.1 Introduction Statistical Process Control (SPC): SPC is a powerful collection of problem-solving tools useful in achieving process stability and improving capability through the
Visual Background Recommendation for Dance Performances Using Dancer-Shared Images
 2016 IEEE International Conference on Internet of Things (ithings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData)
2016 IEEE International Conference on Internet of Things (ithings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData)
Chapter 5: Methods and Philosophy of Statistical Process Control
 Chapter 5: Methods and Philosophy of Statistical Process Control Learning Outcomes After careful study of this chapter You should be able to: Understand chance and assignable causes of variation, Explain
Chapter 5: Methods and Philosophy of Statistical Process Control Learning Outcomes After careful study of this chapter You should be able to: Understand chance and assignable causes of variation, Explain
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Uncovering Anomalous Usage of Medical Records via Social Network Analysis
 TRUST Autumn 2011 Conference Uncovering of Medical Records via Social Network Analysis You Chen, Ph.D. Biomedical Informatics Dept., School of Medicine EECS Dept., School of Engineering November 2, 2011
TRUST Autumn 2011 Conference Uncovering of Medical Records via Social Network Analysis You Chen, Ph.D. Biomedical Informatics Dept., School of Medicine EECS Dept., School of Engineering November 2, 2011
Fun Neural Net Demo Site. CS 188: Artificial Intelligence. N-Layer Neural Network. Multi-class Softmax Σ >0? Deep Learning II
 Fun Neural Net Demo Site CS 188: Artificial Intelligence Demo-site: http://playground.tensorflow.org/ Deep Learning II Instructors: Pieter Abbeel & Anca Dragan --- University of California, Berkeley [These
Fun Neural Net Demo Site CS 188: Artificial Intelligence Demo-site: http://playground.tensorflow.org/ Deep Learning II Instructors: Pieter Abbeel & Anca Dragan --- University of California, Berkeley [These
Impact of new imaging modalities on video surveillance and invasion of privacy
 Impact of new imaging modalities on video surveillance and invasion of privacy Pavel Korshunov 25/11/14 VideoSense Winter School 2014 1 The reality today 25/11/14 - VideoSense Winter School 2014 2 Motivation
Impact of new imaging modalities on video surveillance and invasion of privacy Pavel Korshunov 25/11/14 VideoSense Winter School 2014 1 The reality today 25/11/14 - VideoSense Winter School 2014 2 Motivation
Early Skip Decision based on Merge Index of SKIP for HEVC Encoding
 , pp.287-292 http://dx.doi.org/10.14257/astl.2016.139.60 Early Skip Decision based on Merge Index of SKIP for HEVC Encoding Jinwoo Jeong, Sungjei Kim, and Yong-Hwan Kim, Intelligent Image Processing Research
, pp.287-292 http://dx.doi.org/10.14257/astl.2016.139.60 Early Skip Decision based on Merge Index of SKIP for HEVC Encoding Jinwoo Jeong, Sungjei Kim, and Yong-Hwan Kim, Intelligent Image Processing Research
Course 495: Advanced Statistical Machine Learning/Pattern Recognition
 Course 495: Advanced Statistical Machine Learning/Pattern Recognition Lectures: Stefanos Zafeiriou Goal (Lectures): To present modern statistical machine learning/pattern recognition algorithms. The course
Course 495: Advanced Statistical Machine Learning/Pattern Recognition Lectures: Stefanos Zafeiriou Goal (Lectures): To present modern statistical machine learning/pattern recognition algorithms. The course
Calculation of Trail Usage from Counter Data
 1. Introduction 1 Calculation of Trail Usage from Counter Data 1/17/17 Stephen Martin, Ph.D. Automatic counters are used on trails to measure how many people are using the trail. A fundamental question
1. Introduction 1 Calculation of Trail Usage from Counter Data 1/17/17 Stephen Martin, Ph.D. Automatic counters are used on trails to measure how many people are using the trail. A fundamental question
Purpose. Scope. Process flow OPERATING PROCEDURE 07: HAZARD LOG MANAGEMENT
 SYDNEY TRAINS SAFETY MANAGEMENT SYSTEM OPERATING PROCEDURE 07: HAZARD LOG MANAGEMENT Purpose Scope Process flow This operating procedure supports SMS-07-SP-3067 Manage Safety Change and establishes the
SYDNEY TRAINS SAFETY MANAGEMENT SYSTEM OPERATING PROCEDURE 07: HAZARD LOG MANAGEMENT Purpose Scope Process flow This operating procedure supports SMS-07-SP-3067 Manage Safety Change and establishes the