SOAR Range Validation Test: Autonomous Buoyancy- Driven Gliders, Autonomous Surface Vehicles, and Autonomous Profiling Floats
|
|
|
- Gladys Wilkinson
- 6 years ago
- Views:
Transcription
1 Office of Naval Research Passive Autonomous Acoustic Monitoring of Marine Mammals Dr. Michael W e i s e ONR Program Manager Marine Mammals & Biological Oceanography (Code 322) SOAR Range Validation Test: Autonomous Buoyancy- Driven Gliders, Autonomous Surface Vehicles, and Autonomous Profiling Floats 3-9 January, 2011 Neil M. Bogue Applied Physics Laboratory, University of Washington Gerald D Spain Marine Physical Lab, Scripps Institution of Oceanography David Fratantoni Woods Hole Oceanographic Institution John Hildebrand Marine Physical Laboratory, Scripps Institution of Oceanography Haru Matsumoto Cooperative Institute for Marine Resources Studies, Oregon State University National Oceanic and Atmospheric Administration David Moretti Naval Undersea Warfare Center, Newport, RI
2 Objective The objective of this exercise is to analyze the performance of near-real-time passive acoustic detection, classification, and localization systems integrated onto a set of autonomous platforms, including buoyancy-driven underwater gliders, autonomous surface platforms, and profiling floats, to monitor marine mammal calling activity. The performance analysis will be based on inter-comparisons of the outputs of the various autonomous platform systems and on comparison with the detections made on the SOAR range hydrophones. The results of this test will be used to evaluate the readiness of the participating technologies for a fleet demonstration test. Background In April 2005, D. Moretti, N. DiMarzio, and others from NUWC Newport demonstrated the ability to detect and localize the vocalizations of Blainville's beaked whales (Mesoplodon densirostris) on the AUTEC fixed hydrophone range [Moretti, 2006]. Detections were verified by visual observations. This ability has been demonstrated many times since ([DiMarzio, 2008; Ward, 2008]), and has been extended to other odontocetes [Morrissey, 2006], to other marine mammal species, and to other Navy ranges. In 2007, ONR started the Passive Acoustic Autonomous Monitoring (PAAM) of Marine Mammals program to develop near-real-time monitoring systems on autonomous underwater vehicles. The program is focused on passive acoustic systems for autonomous detection, classification, localization, and tracking of marine mammals on Navy exercise areas for periods of nine weeks. This exercise will use the transient waveform detection and localization capabilities of the SOAR range hydrophones developed by Dave Moretti and others as the ground-truth for verification of the near-real-time results from the autonomous ocean platforms. Six types of PAAM systems will be evaluated in this test, including three types of buoyancy-driven underwater gliders, an autonomous surface platform, and two types of freely drifting profiling floats. The list of the types of platforms, and the numbers of each are listed below. 1. Buoyancy-Driven Underwater Gliders: (1) Marine Physical Laboratory, Scripps Institution of Oceanography (MPL/SIO) and Applied Physics Laboratory, University of Washington (APL/UW) flying wing underwater glider, ZRay, equipped with three types of passive acoustic monitoring systems: 1) a 27-element hydrophone array all along the leading edge of the glider wing whose outputs are connected to a real-time detection/localization and recording system, 2) a WHOI 2-channel (LF and MF) DMON detection/classification and recording system, and 3) a
3 single, very-wide-band hydrophone, detection/classification, and recording system (mini-harp). (2) APL/ UW Seagliders, an underwater glider equipped with a single omnidirectional hydrophone and internal recorder-detector electronics designed for beaked whales. (1) Webb Research Slocum glider operated by Woods Hole Oceanographic Institution (WHOI) equipped with a 2-channel (LF and MF) WHOI-developed Digital MONitoring (DMON) detection/classification and recording system. 2. Autonomous Surface Platform: (2) Liquid Robotics Wavegliders equipped with a single 100-kHz wide hydrophone ( HARP ) and odontocete detector-classifier system. 3. Freely-Drifting Profiling Floats: (2) Cooperative Institute for Marine Resources Studies-Oregon State University (CIMRS/OSU) QUEphones, an APEX float equipped with a single omni-directional hydrophone and internal recorder-detector electronics. (2) WHOI profiling floats equipped with a 2-chan (LF and MF) DMON detection/classification system. Details on these systems are given in the Instrumentation section below. List of Acronyms APL/UW- Applied Physics Laboratory, University of Washington AUTEC Atlantic Undersea Test and Evaluation Center CIMRS/OSU) - Cooperative Institute for Marine Resources Studies, Oregon State University DMON Digital Monitor autonomous detection classification system from WHOI HARP High (actually wide) Frequency Acoustic Recording Package MPL/SIO Marine Physical Laboratory, Scripps Institution of Oceanography NOAA National Oceanographic and Atmospheric Administration NASNI Naval Air Station North Island NUWC Naval Undersea Warfare Center PAAM Passive Autonomous Acoustic Monitoring program ROC Range Operations Center at North Island SOAR Southern California Anti-Submarine Warfare Range SCORE Southern California Offshore Range SPAWAR SSC Pacific Space and Naval Warfare Systems Center Pacific WHOI Woods Hole Oceanographic Institution
4 Schedule, Range Validation Test Date Activity Notes Fri, 17 DEC APL/UW Seagliders and gear arrive Marine Physical Lab, Pt. Loma for check-out. Load AUV van and LARS on R/V Sproul. WHOI shipment Weeks of 20 DEC & 27 DEC Sat, 1 JAN Sun, 2 JAN Mon, 3 JAN Tue, 4 JAN WHOI and NOAA/OSU instrumentation arrives at MPL Pt. Loma. Load ZRay. Evaluate SoCal weather forecast. Dave F. and Haru M. arrive at MPL Bldg 4 for checkout. Finish loading Sproul, including SCORE range radios and pod. Depart 7-8 pm PST for SCORE. NUWC arrives at ROC. Arrive at 1 st light on SCORE. Establish contact with ROC. Check out & deploy gliders. Check out & deploy floats. Shipping address: Gerald D Spain Marine Physical Lab, Bldg Rosecrans St. San Diego, CA Please provide tracking info so equipment can be rec d and stored in Bldg. 4. Coordinate with team through . Please provide approx. arrival times. Follow Sproul loading and space allocation plan. Personnel on board 1 hour prior to departure. Deploy gliders first to measure currents. Seaglider launch procedure 1 hour each. QUEphone ½- hour each. Flying wing glider program paying for Sproul time. Wed, 5 JAN Finish equipment deployment. Begin ZRay ops. Thu-Sat, 6-8 JAN Continue ZRay ops. Monitor all platforms. Recover floats that drift off SOAR range. Sat, 8 JAN Start recovery of gliders & floats. Use RHIB, weather permitting. Sun, 9 JAN Finish recovery & RTP. Stay on range until all equipment on board. Mon, 10 JAN Offload Sproul. Tue morning contingency.
5 Personnel R/V Sproul Gerald D Spain (MPL/SIO) - chief scientist, ZRay ops, John Hildebrand (MPL/SIO) co-chief scientist, Waveglider ops, 2 MPL/SIO people for Waveglider ops, Wayne Husband or Mark Stevenson (SPAWAR SSC Pac), Waveglider ops, Neil Bogue (APL/UW), Seaglider ops, Trina Litchendorf (APL/UW), Seaglider ops, Dave Fratantoni (WHOI), Slocum glider ops, profiling float ops, Pete Brodsky (APL/UW), ZRay ops, Seaglider ops, Dennis Rimington (MPL/SIO), ZRay ops, Dave Price (MPL/SIO), ZRay ops, Resident Technician (SIO), help with all operations. Range Operations Center (ROC) at NAS/NI Dave Moretti (NUWC), 2-9 JAN, 1 data analyst, Elena McCarthy (NUWC), 2-9 JAN. Shore Support at MPL/SIO Haru Matsumoto (NOAA/OSU), at MPL/SIO 2-3 JAN, Richard Zimmerman (MPL/SIO), Scott Jenkins (MPL/SIO), Tyler Helble (MPL/SIO, SPAWAR SSC Pacific), Mariah Lovejoy (MPL/SIO).
: The ZRay/Liberdade flying wing glider, a buoyancy-driven, 20-ft wing span, autonomous underwater platform. Figure 1 shows a photograph of this new glider.")
6 Instrumentation The following equipment is planned for deployment on this test. ZRay Flying Wing Underwater Glider (1): The ZRay/Liberdade flying wing glider, a buoyancy-driven, 20-ft wing span, autonomous underwater platform. Figure 1 shows a photograph of this new glider. The flying wing glider project is a joint effort between MPL/SIO and APL/UW. The outer shape of this glider is based on a flying wing design in order to optimize horizontal transport efficiency, i.e., minimize propulsion energy consumption traveling in the horizontal. The outer shroud is made of ABS plastic and is mounted to a titanium inner strength structure. All subsystems (also mounted to the titanium structure) are identical, or nearly so, to those in XRay, our first flying wing glider fully tested at sea during three field seasons. The glider has a maximum design depth of 300 m and weighs nearly 1500 lb in air. Figure 1. Photograph of ZRay, suspended from its three lift points in the laboratory, without its 3-ft antenna mast or wing tips installed. During the Range Validation Test, ZRay will carry a variety of passive acoustic sensor systems along with associated real-time detection, classification, and localization hardware and software to perform real-time monitoring across a wide range of marine mammal species. The CAD/CAM drawing of ZRay in Fig. 2 shows the locations of these passive acoustic sensor systems in the glider. Inside a sonar dome all along the wing s leading edge is a 27-channel hydrophone array with 10 khz per channel bandwidth. A low-power single board computer running a real-time localization, detection, and
 hydrophone and associated real-time processing designed for odontocete detection and classification, is being")
7 classification algorithm string designed for humpback whales has been connected to the output from this hydrophone array. A self-contained mini-harp system, with a single, extremely wide band (10 Hz to 100 khz) hydrophone and associated real-time processing designed for odontocete detection and classification, is being installed in Zray. In addition, a 2-channel (low and mid-frequency) Digital Monitoring (DMON) system with integrated detection/classification software has been acquired from Woods Hole Oceanographic Institution and has been integrated in a stand-alone mode in the nose of the wing. Figure 2. CAD/CAM drawing of ZRay with the starboard hatch covers removed and with labels illustrating the locations of the glider s real-time passive acoustic monitoring systems. The pre-launch sequence for ZRay requires about an hour. The glider s launch-andrecovery system, installed on the fantail of the R/V Sproul, allows the glider to be deployed and retrieved without the use of a small boat. Over a hundred launch-andrecovery sequences have been performed in sea states up to sea state 5 without incident.

8 Seagliders (2): S/N 178 and 179, equipped with single omni-directional hydrophones and PAAM electronics (detector-recorder). Seagliders are buoyancy-driven underwater gliders, rated to 1000 m depth, piloted remotely, with data telemetry and command and control via Iridium satellite telephone. Seaglider's in-air weight in deployment configuration is about 115 lbs (52 kg); they are about 7-feet long (2.2 m), with antenna. See Fig. 3. Figure 3. APL/UW Seaglider in handling cradle (people included for scale). The pre-launch check-out and launch sequence usually takes about an hour per Seaglider. They can be prepared in parallel. Seagliders are typically launched either directly from a RHIB or other small boat, or by a sling using a shipboard winch or crane. An example of a sling launch is shown in Fig. 4.
 using a crane or winch from the deck of a")
9 Figure 4. Seaglider sling launch from crane off R/V MELVILLE. Seagliders are recovered either directly into a RHIB or other small boat, or by bridle (or lasso) using a crane or winch from the deck of a larger vessel. A bridle recovery from a TAGS-60 class ship is shown in Fig. 5.

10 Figure 5. Seaglider recovery using bridle off TAGS-60 class vessel. The Seagliders will be piloted from a command center at APL/UW in Seattle. Only one Seaglider technician, with help from the ship s Resident Technician and others on board, is required for check-out, deployment, and recovery.

 recording capability. Figure 6. Three Slocum gliders resting in their transport dollys on the dock. Figure 7. A Slocum glider on the surface.")
11 Slocum Glider (1): The Slocum glider (re Figs. 6 and 7), manufactured by Webb Research, also is a buoyancy-driven autonomous underwater glider. It is designed to go to a maximum depth of 300 m. During the Range Validation Test, the Slocum glider will be outfitted with a 2-chan DMON digital monitoring system with low- (LF) and midfrequency (MF) recording capability. Figure 6. Three Slocum gliders resting in their transport dollys on the dock. Figure 7. A Slocum glider on the surface. The upward-looking ADCP mounted on the top of the glider will not be used in the Range Validation Test.


12 Wavegliders (2): The Waveglider, an autonomous surface vehicle (ASV) manufactured by Liquid Robotics. The Waveglider propels itself forward using the differential wave motion of a float at the ocean surface and a glider at depth. The operation of this USV is described in Fig. 8 below. Figure 8. Description of the Waveglider commercialized by Liquid Robotics. As shown in the left-hand plot of Fig. 8, water particles move in approximately circular orbits of decreasing diameter as depth increases. The float pulls the glider upward with a rising wave crest, but the water around the glider remains relatively stationary. This action provides the necessary energy for forward propulsion of the glider/float assembly. The basic Waveglider components are labeled and described in the right-hand plot in Fig. 8. Massive components are positioned in the submerged glider where they are protected from the winds and sea surface action. The surface float is light, low drag, and rugged. The tether connecting the glider and surface float typically is 5-15 m in length. During the Range Validation Test, each of two Wavegliders will be equipped with a single hydrophone towed behind the glider along with a data acquisition system. One ASV also will contain a mini-harp real-time odontocete detection/classification unit. The communication systems attached to its surface float allow it to be operated continuously under human control.
, park there for a specified time, then profile during the ascent to the surface for data telemetry.")
13 QUEphones (2): QUEphones are specially modified APEX profiling floats, equipped with single omni-directional hydrophone and internal recorder-detector electronics. They are designed to be neutrally-buoyant at a specified depth (density surface), park there for a specified time, then profile during the ascent to the surface for data telemetry. A QUEphone is shown in Fig. 9. Figure 9. QUEphone (on acoustic test barge) lifted by a bridle attached to the collar. QUEphones are typically deployed by sling or slip-line from the deck of a ship. The inair weight is about 125 lbs (56kg) and they are about 5 feet (1.5m) tall. They are recovered via RHIB or other small boat, or if it is extremely calm, by use of a recovery bridle or lasso from the deck of a shallow draft vessel. Figure 10 shows a QUEphone in the water.
 and at")

14 Figure 10. QUEphone diving in water (L) and at surface (R). The pictures show the antenna, omnidirectional hydrophone (on top), and lifting bridle.

15 WHOI Profiling Floats (2): The WHOI profiling floats, shown in Fig. 11 below. The operation of the profiling floats from WHOI is similar to that of the QUEphone floats. These two WHOI floats will profile to 800 m and remain at that depth for about 6 hours, and then profile back to the surface. This pattern will be repeated, with a surfacing once every 12 hours, throughout the duration of the sea test. The floats will be equipped with the same 2-chan DMON system as used on the Slocum glider. Figure 11. The WHOI profiling float. Note that the float will not have VCM vanes attached for the Range Validation Test on the SOAR range.

16 Operations Plan The SOAR operation areas of greatest marine mammal abundance are T2 and T4, at the western and southern parts of the range, respectively. Highlighted in yellow on the map in Fig. 12 is the approximate area coverage of this instrumented part of the range. The R/V Sproul will position itself near the southern edge of the SOAR range by first light on the first morning of the first day. A detailed map showing the recommended glider tracks with respect to the range hydrophone locations is distributed under separate cover. Figure 12. The outline of the locations of the SOAR range hydrophones (in yellow) west of San Clemente Island. Start of the Exercise: Shortly after first light on first day on the range, the two Seagliders and the Slocum glider will be checked out and deployed. Deployment of the Wavegliders will follow. By deploying the gliders first, they can be used to assess the prevailing ocean currents prior to deployment of the freely drifting profiling floats. The hull-mounted ADCP on the Sproul also will be useful for this purpose. The gliders and Wavegliders will begin their surveys following a track along the western edge of the SOAR range, heading to the northwest (details on the recommended tracks is distributed under separate cover). Just to the southeast of the western extent of the SOAR range, the gliders will turn to the northeast and then to the southeast on the return leg. These recommended survey patterns will continue to be traversed as marine mammal detection results are available from the NUWC personnel at the SOAR Range Operations Center (ROC).
17 Starting on the morning of Mon, 3 Jan, the SOAR range operations center (ROC) at NASNI will be manned by personnel from NUWC Division Newport. They will monitor the SOAR range hydrophones for the presence of marine mammal calling activity and will communicate this information by satellite phone and range radio to the R/V Sproul. These results then can be used to possibly modify the glider survey patterns, as well as guide the deployment locations of the profiling floats. Once these platforms are deployed, their operations will be monitored remotely. Any freely drifting floats that drift off the instrumented (SOAR) part of the SCORE range will be recovered and secured for the remainder of the sea trip. The recording duration for the two QUEphones is about 4 days and 6-7 days for the WHOI profiling floats. ZRay Flying Wing Underwater Glider: The ZRay flying wing glider deployments will commence on the morning of the second day on the range (Wed, 5 Jan). The glider will go in the water shortly after breakfast, remain in the water all day, and be recovered on board shortly before sunset each day Wed thru Fri, 5-7 Jan, and possibly Sat, 8 Jan. After each surfacing, the data collected onboard the glider will be zipped and uploaded to the Sproul through RF modem and immediately ed to Richard Zimmerman, Scott Jenkins, and Mariah Lovejoy providing shore support. Once the glider descends on its next dive, in-depth analyses will be conducted by ZRay personnel both on the Sproul and on shore to adjust the flight parameters on the subsequent dive. While at depth, ZRay will become neutrally buoyant, freely drifting for periods of min in order to passively listen for marine mammal calls. By using this approach, the engineering testing goals as well as those for demonstrating a real-time marine mammal monitoring capability with ZRay can be achieved. Seagliders: Once trim dives are complete, the Seagliders will be commanded to perform 1000 m dives, with the autonomous detection system turned on below a given depth, typically between 100 m and 500 m. These 1000-m dives will generally take around five hours, although they can be sped up to about three hours, or slowed down to almost nine hours, if needed. At each surfacing, the Seagliders will upload their data, including standard CTD profiles, acoustic detection statistics, and optionally, acoustic time-series snippets and spectra. The Seagliders also download revisions to commands, waypoints, or sampling and detection parameters sent by the glider command center. Seagliders carry an acoustic transponder for ranging in case of an emergency recovery. The transponder operates in the 9-14 khz band. Seagliders can generally travel about 12 nm (20 km) through the water in 24 hours, but can also hold station to within a radius of about 1.5 times the dive depth, or 1.5 km on
18 1000-m dives. Seaglider can stem depth-averaged currents of up to 40 cm/sec (0.8 kts). Such currents are unlikely on the range (re Environmental Conditions below), assuming 1000-m dives, so the gliders should not have problems maintaining track and station control. Upon recovery, the Seagliders are commanded to stay at the surface and report their position at regular intervals. QUEphone Profiling Floats: Since the QUEphones are passive, they drift with the prevailing ocean current at their neutrally-buoyant depth. The ocean currents will be determined prior to deployment, as described at the beginning of this section. This determination will be critical to picking the launch position in order to keep the QUEphones within the assigned water-space. Previous measurements on the SCORE range (re Environmental Conditions) suggest that the general direction of the current will be to the north and northwest. Therefore, the initial plan is to deploy the two QUEphones at the southern end of the SOAR range area. The instrument s neutrally-buoyant depth will be set to about 1000 m. They will stay at this depth for about 16 hours/day and drift with the current. Each QUEphone will be programmed to surface once a day at a specific time, one at about 0900 and the other at about 1500 (local time). Each will report the status to the NOAA-Pacific Marine Environmental Laboratory Iridium Rudics web site. Access to that web site should be available from the Sproul. Their progress will be monitored 24/7 through this web site. The ocean currents will be monitored throughout the exercise, and the QUEphones, and PAAM instrumentation in general, will be repositioned or recovered if necessary. Note that if the current at the neutrally-buoyant depth is 10 cm/sec, a QUEphone drifts 35 km in 4 days. SOAR Range Operations Center at NASNI: NUWC personnel in the ROC will continue to operate the M3R system and report marine mammal calling activity until the Sproul begins platform recovery on Sat afternoon, 8 Jan. M3R data recording in the ROC will continue until the Sproul returns to port at the end of the day on Sun, 9 Jan. Certain periods of time may be selected for recording of the raw range hydrophone outputs. The SOAR range operations center does NOT control the water space on the north, south, west, or east of the SOAR range. Rather, all water space outside SOAR below a depth of 90 ft (30 m) is managed by SUBPAC (SUBPAC does not manage the water space within 90 ft of the surface). Therefore, either: a) gliders and profilers at depths in excess of 90 ft must be retrieved if they move off range, b) permission must be obtained from SUBPAC beforehand, or c) gliders and profilers that move off the SOAR range must be programmed to stay within 90 ft of the surface. In cases b) or c), longer ship transits to recovery would be required at the end of the test.
19 Environmental Conditions at SOAR During the ASWEET exercise the last week of September and first week of October, 2010, the APL/UW team determined from Seaglider flights that the ocean currents near the surface were typically about 20 cm/s ( kt) to the NNW. Typical depthaveraged current estimates were as follows: m 12 cm/s 348 deg T m 4 cm/s 335 deg T Figure 13 shows the temperature-salinity (T-S) profile from a 1000 m dive of one of the Seagliders on the SCORE range on 5 OCT, 2010, at 32/44.07N, 118/55.73W. Figure 13. Temperature and Salinity profiles to 1000 m collected by one of the APL/UW Seagliders on the SCORE range (32/44.07N, 118/55.73W) during the ASWEET exercise on 5 Oct, 2010.
20 For comparison, Fig. 14 shows a T-S profile from a 200 m dive by the same Seaglider in a Southern California deployment, on 17 NOV, 2007, at 32/45.97N, 117/46.83W. Although this location is east of San Clemente Island, it is closer in time to the time period of the Range Validation Test. Figure 14. A T-S profile to 200 m collected by the same Seaglider as in Fig. 13. These data were collected on 17 Nov, 2007, to the east of San Clemente Island, at 32/45.97N, 117/46.83W. Communications during the Test Ship-to-SOAR Operations: The SOAR range operations people would prefer to communicate, in descending order of priority, via: 1. Satellite phone (ROC main line: ) 2. Nextel cell phones (Nextel cell phone tower on San Clemente Island) 3. channel 82A VHF marine band radio The R/V Sproul also will be equipped with range radios.
21 The main phone number for the SOAR range at the Range Operations Center at Naval Air Station, North Island is The SOAR range has no requirement for range transponders or range radios. However, Dave Moretti has arranged for the R/V Sproul to be equipped with range radios and a range tracking pod installation on Mon, 3 Jan. Navigation Requirements for Off-Board Platforms during the Test The SOAR range operations center does NOT control the water space on the north, south, west, or east of the SOAR range. Rather, all water space outside SOAR below a depth of 90 ft (30 m) is managed by SUBPAC (SUBPAC does not manage the water space within 90 ft of the surface). Therefore, either: a) gliders and profilers at depths in excess of 90 ft must be retrieved if they move off range, b) permission must be obtained from SUBPAC beforehand, or c) gliders and profilers that move off the SOAR range must be programmed to stay within 90 ft of the surface. The SOAR range does NOT require tracking pingers on the platforms for sub-surface tracking on the range. Technical and Logistic Support Requests 1. Request from SUBPAC for instrumentation off the SOAR range to be below 90 ft during the 4-10 Jan period. 2. Submit Notice to Mariners and notification to other local Navy activities. 3. Phone numbers for NUWC personnel in the ROC and the satellite phone on R/V Sproul. 4. Vessel capable of emergency recovery or repositioning, if needed (e.g., Vessel Assist). 5. SOAR range fixed hydrophone transient detection and localization data, including start and stop times of detections on each hydrophone for period of 3-9 Jan. 6. Visits to the SOAR ROC during the 3-7 Jan period require a visit request to be on file. the request to Ms. Roxanne Jones (rjones@score.com) with copy to Robert Tahimic (bobt@score.com). The required information is: a. Visitor's full name (Last, First, Middle Initial), b. Company or Organization Name - complete address, phone number, fax number & CAGE code, c. Visitor's Social Security Number - this information is protected by the Privacy Act of 1974, d. Visitor's Date of Birth and Place of Birth (city/state),
22 e. Citizenship, f. Individual's Level of Clearance Access - this information is verified using JPAS, g. Specific Date(s) of Visit (include the year), h. Technical Point of Contact (POC) - Robert Tahimic , i. Specific Purpose of Visit (include classification of visit) - M3R monitoring of beaked whales during glider test: UNCLASS, j. Contract number - for non-governmental activities, k. Name, Title, and Signature of authorizing company official (may NOT be one of the listed visitors). Information on Ships R/V Sproul - To be used during deployment leg, and preferably during recovery leg. Vessel Assist San Diego , (619) P.O. Box 6778 San Diego, CA Merlin ($6K/day plus fuel) Neil had positive experience using it for SCORE range recovery after ASWEET. The Truth ft dive boat with good davit, out of Santa Barbara. Pacific Venture - Capt. Chuck White, charter service out of Oceanside Harbor, around $2.5K/day - 5-hr trip from Oceanside to SCORE, Recommended by Todd Pickering at SPAWAR SSD. SPAWAR SSD San Diego's Steve Whiteside's 11-m RHIBs $3-4K per day with techs, day-time use only in/out of Wilson's Cove - SPAWAR Dive locker. USNS ships Sioux - in middle of maintenance period, ending 03 Dec, 2010, Salvor - already committed and won't be in San Diego until around 30 Nov.
23 Questions and List of Tasks 1. Who will develop a loading plan and space allocation for R/V Sproul? 2. What is required to get SUBPAC permission for equipment to be off the SOAR range and below 90 ft? 3. Contingency plan for equipment recovery at end of test in case the weather is rough. 4. How will information from the M3R at the ROC get distributed to all shipboard participants and to glider command centers (satellite phone call from ROC to one shipboard participant may not be sufficient)? References [DiMarzio, 2008] DiMarzio, N., Moretti, D., Ward, J., Morrissey, R., Jarvis, S., Izzi, A. M., Johnson, M., Tyack, P., Hansen, A., Passive acoustic measurement of dive vocal behavior and group size of Blainville's beaked whale (Mesoplodon densirostris) in the Tongue of the Ocean (TOTO), Canadian Acoustics, 36(1), pp , [Moretti, 2006] Moretti, D., DiMarzio, N., Morrissey, R., and Jarvis, S., Estimating the density of Blainville's beaked whale (Mesoplodon densirostris) in the Tongue of the Ocean (TOTO) using passive acoustics, Proc. MTS/IEEE OCEANS Boston, [Morrissey, 2006] Morrissey, R. P., Ward, J., DiMarzio, N., Jarvis, S., Moretti, D.J., Passive acoustic detection and localization of sperm whales (Physeter macrocephalus) in the Tongue of the Ocean, Applied Acoustics, 67, pp , [SCORE, 2007] Southern California Offshore Range (SCORE) Development History ( ), 26 pgs. [Ward, 2008] Ward, J., Morrissey, R., Moretti, D., DiMarzio, N., Jarvis, S., Johnson, M., Tyack, P., and White, C., Passive acoustic detection and localization of Mesoplodon densirostris (Blainville s beaked whale) vocalizations using distributed bottom-mounted hydrophones in conjunction with a Digital Tag (DTag) recording, Canadian Acoustics, 36(1), pp60-66, Contact Information Neil M. Bogue <bogue@u.washington.edu> (wk), (cell) Gerald D Spain gdspain@ucsd.edu (wk), (fax) Marine Physical Laboratory 291 Rosecrans St. San Diego, CA 92106
24 David Fratantoni (wk), (cell), (fax) Autonomous Systems Laboratory Department of Physical Oceanography, MS#30 Woods Hole Oceanographic Institution Woods Hole, MA USA John Hildebrand (wk) Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA Haru Matsumoto (wk), (fax) CIMRS/NOAA, Oregon State Univ SE OSU Dr. Newport, OR "Moretti, David J CIV NUWC NWPT" <david.moretti@navy.mil>, morettidj@hotmail.com Weise, Michael michael.j.weise@navy.mil (wk) Dr. Michael J. Weise Marine Mammals & Biological Oceanography Program (322 MMB) Office of Naval Research - Code 32 One Liberty Center - Rm N. Randolph St. Arlington, VA office fax michael.j.weise@navy.mil Programs/Atmosphere-Research-322/Marine-Mammals-Biology.aspx SCORE Range Range Operations Center main number: Robert Tahimic, bobt@score.com, Heidi Nevitt, heidi@score.com, Dorothy ( DJ ) Pascua
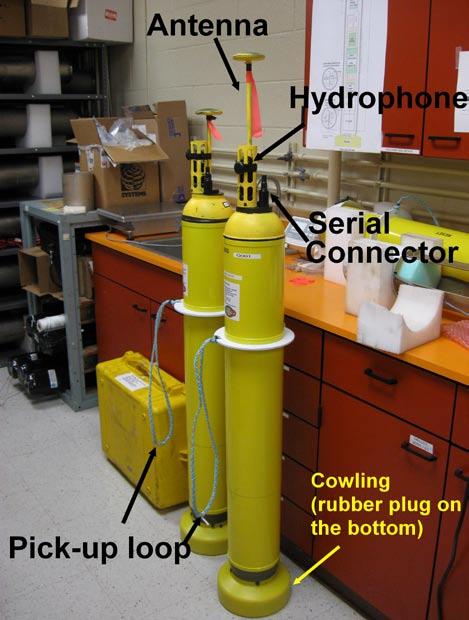
25 APPENDIX 1 - QUEPhone Deployment Manual Deployment At the site 10 minutes before deployment Open serial communication program (9600, N, 8, 1) and connect SAIL com. (SAIL needs ext power!). Connect the 6-pin Impulse connector. Hit return (this wakes up the QUEphone). Make sure there is no file. Type e to execute. Put the dummy plug back. Move the QUEphone to a place with clear sky view (for Iridium com) Ready to deploy You have about 30 minutes to deploy. It transmits brief data file twice approximately at 15-min interval, then dive begins. To deploy from the ship, use a polypro line loop to lower it in water. Recovery To pick it up, grab by the polypro loop (not by antenna or hydrophone). Preferably to be picked up by RHIB if weather permits. If it is from a low draft boat, a10-ft pole with a hook (with rope on one end) would do. We will ship the telescoping pole with a hook line. Move the QUEphone where clear view of sky. Open Motocross com software. Connect the serial cable. Hit return (sometimes it does not respond because it is busy with TX/RX with Iridium. Let it finish.). Type k to kill. Make sure DSP is not ON. i*k to kill the power of DSP. Move the piston to 110 for shipping (ig 110). Moving the piston to 110 takes time (about 15 min). When the motor stops, type q to quite. This make the float low-power hibernate mode. Clean with fresh water. Remove the rubber plug on the bottom. Wash well inside cowling. Wash inside the pressure sensor. Dry it for shipping.
26
Pacific Missile Range Facility (PMRF) Species Verification and Satellite Tagging Test: January Post-Test Report
 Species Verification and Satellite Tagging Test: January Post-Test Report") Pacific Missile Range Facility (PMRF) Species Verification and Satellite Tagging Test: January 2012 Post-Test Report POC: David J. Moretti Naval Undersea Warfare Center Division Newport: Marine Mammal
Pacific Missile Range Facility (PMRF) Species Verification and Satellite Tagging Test: January 2012 Post-Test Report POC: David J. Moretti Naval Undersea Warfare Center Division Newport: Marine Mammal
XRAY GLIDER Underwater Video Cruise Plan May 21, 22, 23, 2007 R. G. Sproul
 XRAY GLIDER Underwater Video Cruise Plan May 21, 22, 23, 2007 R. G. Sproul Purpose The ONR program manager for the XRAY/Liberdade underwater flying wing glider has requested that an underwater video of
XRAY GLIDER Underwater Video Cruise Plan May 21, 22, 23, 2007 R. G. Sproul Purpose The ONR program manager for the XRAY/Liberdade underwater flying wing glider has requested that an underwater video of
Acoustic Float for Marine Mammal Monitoring
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Float for Marine Mammal Monitoring Christopher Jones Applied Physics Laboratory University of Washington 1013
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Float for Marine Mammal Monitoring Christopher Jones Applied Physics Laboratory University of Washington 1013
Acoustic Seaglider for Beaked Whale Detection
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale ion Neil M. Bogue and Jim Luby Applied Physics Laboratory University of Washington
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale ion Neil M. Bogue and Jim Luby Applied Physics Laboratory University of Washington
Marine Mammal Acoustic Tracking from Adapting HARP Technologies
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Marine Mammal Acoustic Tracking from Adapting HARP Technologies Sean M. Wiggins and John A. Hildebrand Marine Physical
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Marine Mammal Acoustic Tracking from Adapting HARP Technologies Sean M. Wiggins and John A. Hildebrand Marine Physical
Acoustic Seaglider for Beaked Whale Detection
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale ion Neil M. Bogue and Jim Luby Applied Physics Laboratory University of Washington
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale ion Neil M. Bogue and Jim Luby Applied Physics Laboratory University of Washington
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010)
") RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
Acoustic Seaglider for Beaked Whale Detection
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale Detection Neil M. Bogue Applied Physics Laboratory University of Washington Box 355640
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale Detection Neil M. Bogue Applied Physics Laboratory University of Washington Box 355640
Noise Experiment #2. Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA February 22 February 2010
 Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
Wave Glider: Liege Colloquium. Colloquium April 27
 The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
The below identified patent application is available for licensing. Requests for information should be addressed to:
 DEPARTMENT OF THE NAVY NAVAL UNDERSEA WARFARE CENTER DIVISION NEWPORT OFFICE OF COUNSEL PHONE: (401) 832-3653 FAX: (401) 832-4432 NEWPORT DSN: 432-3653 Attorney Docket No. 96811 Date: 14 May 2008 The below
DEPARTMENT OF THE NAVY NAVAL UNDERSEA WARFARE CENTER DIVISION NEWPORT OFFICE OF COUNSEL PHONE: (401) 832-3653 FAX: (401) 832-4432 NEWPORT DSN: 432-3653 Attorney Docket No. 96811 Date: 14 May 2008 The below
Remote Monitoring of Dolphins and Whales in the High Naval Activity Areas in Hawaiian Waters
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Remote Monitoring of Dolphins and Whales in the High Naval Activity Areas in Hawaiian Waters Whitlow W. L. Au and Marc
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Remote Monitoring of Dolphins and Whales in the High Naval Activity Areas in Hawaiian Waters Whitlow W. L. Au and Marc
Biological & Behavioral Response Studies of. Marine Mammals in Southern California, BRS.org. Photos taken under NMFS permit #
 Biological & Behavioral Response Studies of Marine Mammals in Southern California, 2015 ( SOCAL- 15) www.socal- BRS.org Photos taken under NMFS permit #14534-2 1 SOCAL- 15 OVERVIEW SOCAL- 15 continues
Biological & Behavioral Response Studies of Marine Mammals in Southern California, 2015 ( SOCAL- 15) www.socal- BRS.org Photos taken under NMFS permit #14534-2 1 SOCAL- 15 OVERVIEW SOCAL- 15 continues
"Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider"
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
Beaked whale foraging behavior before, during, and after sonar exposure on a Navy test range
 Beaked whale foraging behavior before, during, and after sonar exposure on a Navy test range Stephanie Watwood, Elena McCarthy, Nancy DiMarzio, Ron Morrissey, Susan Jarvis, and David Moretti Marine Mammal
Beaked whale foraging behavior before, during, and after sonar exposure on a Navy test range Stephanie Watwood, Elena McCarthy, Nancy DiMarzio, Ron Morrissey, Susan Jarvis, and David Moretti Marine Mammal
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science
 Moorings: New Capabilities for Seagoing Science") Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey
 The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader Community
 Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
WEBB RESEARCH CORPORATION
 Use spacebar or arrow keys to advance slide show WEBB RESEARCH CORPORATION Falmouth, MA APEX Profiler SLOCUM Glider Rev: 06/22/08 WEBB RESEARCH CORPORATION Specialists in neutrally buoyant drifters and
Use spacebar or arrow keys to advance slide show WEBB RESEARCH CORPORATION Falmouth, MA APEX Profiler SLOCUM Glider Rev: 06/22/08 WEBB RESEARCH CORPORATION Specialists in neutrally buoyant drifters and
Final Report Alaska Department of Fish and Game State Wildlife Grant T July 1, 2003 June 30, 2006:
 Final Report Alaska Department of Fish and Game State Wildlife Grant T-1-6-4 July 1, 2003 June 30, 2006: Acoustic Monitoring for Killer Whales in the Bering Sea John Hildebrand and Erin Oleson Marine Physical
Final Report Alaska Department of Fish and Game State Wildlife Grant T-1-6-4 July 1, 2003 June 30, 2006: Acoustic Monitoring for Killer Whales in the Bering Sea John Hildebrand and Erin Oleson Marine Physical
Fine-scale Focal DTAG Behavioral Study in the Gulf of Maine
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Fine-scale Focal DTAG Behavioral Study in the Gulf of Maine Alessandro Bocconcelli Woods Hole Oceanographic Institution
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Fine-scale Focal DTAG Behavioral Study in the Gulf of Maine Alessandro Bocconcelli Woods Hole Oceanographic Institution
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System
 Light Fiber Tether System") Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
MAPCO2 Buoy Metadata Report Project Title:
 MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
~ A Behavioral Response Study in 2007 &2008 (BRS 07/08) was conducted in the Bahamas to
 was conducted in the Bahamas to") Biological and Behavioral Response Studies in the Bahamas in 27 28 (BRS 7/8) ~ Project Summary ~ ~ A Behavioral Response Study in 27 &28 (BRS 7/8) was conducted in the Bahamas to study diving behavior
Biological and Behavioral Response Studies in the Bahamas in 27 28 (BRS 7/8) ~ Project Summary ~ ~ A Behavioral Response Study in 27 &28 (BRS 7/8) was conducted in the Bahamas to study diving behavior
Oceanographic Research With The LiquID Station
 Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Passive Autonomous Acoustic Monitoring of Marine Mammals: System Development Using Seaglider. Final Report
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Passive Autonomous Acoustic Monitoring of Marine Mammals: System Development Using Seaglider Final Report 30 January 2015
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Passive Autonomous Acoustic Monitoring of Marine Mammals: System Development Using Seaglider Final Report 30 January 2015
The Wave Glider: A Persistent Platform for Ocean Science
 The Wave Glider: A Persistent Platform for Ocean Science Justin Manley and Scott Willcox Liquid Robotics - Sunnyvale, CA justin.manley@liquidr.com, http://www.liquidr.com Abstract The Wave Glider is an
The Wave Glider: A Persistent Platform for Ocean Science Justin Manley and Scott Willcox Liquid Robotics - Sunnyvale, CA justin.manley@liquidr.com, http://www.liquidr.com Abstract The Wave Glider is an
Understanding the Dynamics of Shallow-Water Oceanographic Moorings
 Understanding the Dynamics of Shallow-Water Oceanographic Moorings Mark A. Grosenbaugh Department of Applied Ocean Physics & Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543 phone:
Understanding the Dynamics of Shallow-Water Oceanographic Moorings Mark A. Grosenbaugh Department of Applied Ocean Physics & Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543 phone:
Fine-scale Focal Dtag Behavioral Study of Diel Trends in Activity Budgets and Sound Production of Endangered Baleen Whales in the Gulf of Maine
 Fine-scale Focal Dtag Behavioral Study of Diel Trends in Activity Budgets and Sound Production of Endangered Baleen Whales in the Gulf of Maine Susan E. Parks The Pennsylvania State University, Applied
Fine-scale Focal Dtag Behavioral Study of Diel Trends in Activity Budgets and Sound Production of Endangered Baleen Whales in the Gulf of Maine Susan E. Parks The Pennsylvania State University, Applied
Deep SOLO. Nathalie Zilberman, Dean Roemmich, and SIO float lab. 1. Deep SOLO float characteristics. 2. Deep SOLO float Deployment
 Deep SOLO Nathalie Zilberman, Dean Roemmich, and SIO float lab 1. Deep SOLO float characteristics 2. Deep SOLO float Deployment 3. Deep SOLO temperature and salinity Deep SOLO Float deployment, R/V Tangaroa
Deep SOLO Nathalie Zilberman, Dean Roemmich, and SIO float lab 1. Deep SOLO float characteristics 2. Deep SOLO float Deployment 3. Deep SOLO temperature and salinity Deep SOLO Float deployment, R/V Tangaroa
Update on Canadian Research Vessels Ship Procurement Projects
 Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
CMORE HOE DYLAN October 2012 Draft cruise plan
 CMORE HOE DYLAN 11 1 4 October 2012 Draft cruise plan Cruise ID: KM12-21 Vessel: R/V KILO MOANA University of Hawaii Master of the Vessel: Captain Gray Drewry Chief Scientist: Tara Clemente (UH) OTG Marine
CMORE HOE DYLAN 11 1 4 October 2012 Draft cruise plan Cruise ID: KM12-21 Vessel: R/V KILO MOANA University of Hawaii Master of the Vessel: Captain Gray Drewry Chief Scientist: Tara Clemente (UH) OTG Marine
Wave-Phase-Resolved Air-Sea Interaction
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
Sensors and Platforms for Autonomous Undersea Systems
 Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Fine Scale Baleen Whale Behavior Observed Via Tagging Over Daily Time Scales
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine Scale Baleen Whale Behavior Observed Via Tagging Over Daily Time Scales Mark Baumgartner Woods Hole Oceanographic
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine Scale Baleen Whale Behavior Observed Via Tagging Over Daily Time Scales Mark Baumgartner Woods Hole Oceanographic
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions
 Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Acoustic and Visual Survey of Cetaceans at Palmyra Atoll
 Acoustic and Visual Survey of Cetaceans at Palmyra Atoll Trip report 08/2010 Palmyra, August 18 September 9, 2010 Jason P Larese Mark Deakos Contact: sbaumann@ucsd.edu, jhildebrand@ucsd.edu Scripps Institution
Acoustic and Visual Survey of Cetaceans at Palmyra Atoll Trip report 08/2010 Palmyra, August 18 September 9, 2010 Jason P Larese Mark Deakos Contact: sbaumann@ucsd.edu, jhildebrand@ucsd.edu Scripps Institution
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004
 Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Final Cruise Report Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, April, 2011
 213 APPENDIX I. Cruise Report, Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, August 12, 2011 Final Cruise Report Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, 26-27 April,
213 APPENDIX I. Cruise Report, Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, August 12, 2011 Final Cruise Report Marine Mammal Observer UNDET Monitoring Hawaii Range Complex, 26-27 April,
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
Tagging and Playback Studies to Toothed Whales
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited Tagging and Playback Studies to Toothed Whales Peter L. Tyack Biology Department Woods Hole Oceanographic Institution Woods
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited Tagging and Playback Studies to Toothed Whales Peter L. Tyack Biology Department Woods Hole Oceanographic Institution Woods
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys
 MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
Activity Title: Exploring the Ocean with Robots
 BEST OF COSEE HANDS-ON ACTIVITIES Activity Title: Exploring the Ocean with Robots Learning Objectives This lesson will introduce students to robotic submarines, called gliders, including basic properties
BEST OF COSEE HANDS-ON ACTIVITIES Activity Title: Exploring the Ocean with Robots Learning Objectives This lesson will introduce students to robotic submarines, called gliders, including basic properties
voyageplan SS Itinerary Principal Investigator(s) RV Southern Surveyor program
 RV Southern Surveyor program") 2008 RV Southern Surveyor program voyageplan SS04-2008 RESEARCH CHARTER Deep-Ocean Tsunami Detection Buoy (DART) Scheduled Maintenance Replacement for the Australian Tsunami Warning System (ATWS) Itinerary
2008 RV Southern Surveyor program voyageplan SS04-2008 RESEARCH CHARTER Deep-Ocean Tsunami Detection Buoy (DART) Scheduled Maintenance Replacement for the Australian Tsunami Warning System (ATWS) Itinerary
Rope-less Fishing: A vision for how it can work
 Rope-less Fishing: A vision for how it can work Mark Baumgartner (WHOI), Tim Werner (NEAq), Amy Knowlton (NEAq), Michael Moore (WHOI), and Scott Kraus (NEAq) The need The latest assessment of the North
Rope-less Fishing: A vision for how it can work Mark Baumgartner (WHOI), Tim Werner (NEAq), Amy Knowlton (NEAq), Michael Moore (WHOI), and Scott Kraus (NEAq) The need The latest assessment of the North
NOAA/NWFSC Southern California Shelf Rockfish Hook and Line Survey
 NOAA/NWFSC Southern California Shelf Rockfish Hook and Line Survey NOAA Fisheries, Northwest Fisheries Science Center 2725 Montlake Blvd. E, Seattle, WA 98112 John Harms, NOAA/NWFSC Jim Benante, PSMFC/NWFSC
NOAA/NWFSC Southern California Shelf Rockfish Hook and Line Survey NOAA Fisheries, Northwest Fisheries Science Center 2725 Montlake Blvd. E, Seattle, WA 98112 John Harms, NOAA/NWFSC Jim Benante, PSMFC/NWFSC
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Isis Deployment. TMS and Live Boating. Inmartech08. Dave Turner Operations Co-ordinator.
 Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
ATON System Workshop
 ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
A Wind Profiling Platform for Offshore Wind Measurements and Assessment. Presenter: Mark Blaseckie AXYS Technologies Inc.
 A Wind Profiling Platform for Offshore Wind Measurements and Assessment Presenter: Mark Blaseckie AXYS Technologies Inc. Any Sensor, Any Telemetry, Any Environment Founded in 1974 Part of the AXYS Group
A Wind Profiling Platform for Offshore Wind Measurements and Assessment Presenter: Mark Blaseckie AXYS Technologies Inc. Any Sensor, Any Telemetry, Any Environment Founded in 1974 Part of the AXYS Group
Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution Joseph D. Warren School of Marine and Atmospheric
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution Joseph D. Warren School of Marine and Atmospheric
1 Module A (uniform topography) survey lines Module B (topographic wake) survey lines Module C (submesoscale soup) survey lines...
 survey lines Module B (topographic wake) survey lines Module C (submesoscale soup) survey lines...") ..................................................................................... point Sal Coastal circulation Experiment (SCoNE) / SP1723 CRUISE PLAN ANDRÉ PALÓCZY R/V Robert Gordon Sproul, September/10
..................................................................................... point Sal Coastal circulation Experiment (SCoNE) / SP1723 CRUISE PLAN ANDRÉ PALÓCZY R/V Robert Gordon Sproul, September/10
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System
 Light Fiber Tether System") Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Admiralty Inlet Pilot Tidal Project FERC No Appendix C. Derelict Gear Monitoring Plan
 Appendix C Derelict Gear Monitoring Plan ADMIRALTY INLET PILOT TIDAL PROJECT FERC PROJECT NO. 12690 DERELICT GEAR MONITORING PLAN (submitted with the Final Application for a New Pilot Project License)
Appendix C Derelict Gear Monitoring Plan ADMIRALTY INLET PILOT TIDAL PROJECT FERC PROJECT NO. 12690 DERELICT GEAR MONITORING PLAN (submitted with the Final Application for a New Pilot Project License)
Application for Consent to Conduct Marine Scientific Research in Japan. Date: 18 December 2009 Revised 1/7/ General Information
 Application for Consent to Conduct Marine Scientific Research in Japan Date: 18 December 2009 Revised 1/7/10 1. General Information 1.1 Project name and/or #: Impact of Typhoons on the Pacific: Glider
Application for Consent to Conduct Marine Scientific Research in Japan Date: 18 December 2009 Revised 1/7/10 1. General Information 1.1 Project name and/or #: Impact of Typhoons on the Pacific: Glider
Chapter 9: Sea operations
 Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Characterizing The Surf Zone With Ambient Noise Measurements
 Characterizing The Surf Zone With Ambient Noise Measurements LONG-TERM GOAL Grant Deane Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 93093-0213 phone: (619) 534-0536 fax:
Characterizing The Surf Zone With Ambient Noise Measurements LONG-TERM GOAL Grant Deane Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 93093-0213 phone: (619) 534-0536 fax:
Sensor Platform Project Marine Trials Bidders Conference. Fundy Ocean Research Center for Energy fundyforce.ca
 Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology
 How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
Long-Term Autonomous Measurement of Ocean Dissipation with EPS-MAPPER
 Long-Term Autonomous Measurement of Ocean Dissipation with EPS-MAPPER Neil S. Oakey Bedford Institute of Oceanography Dartmouth, Nova Scotia Canada B2Y 4A2 phone: (902) 426-3147 fax: (902) 426-7827 e-mail:
Long-Term Autonomous Measurement of Ocean Dissipation with EPS-MAPPER Neil S. Oakey Bedford Institute of Oceanography Dartmouth, Nova Scotia Canada B2Y 4A2 phone: (902) 426-3147 fax: (902) 426-7827 e-mail:
DEPARTMENT OF THE NAVY DIVISION NEWPORT OFFICE OF COUNSEL PHONE: FAX: DSN:
 IMAVSBA WARFARE CENTERS NEWPORT DEPARTMENT OF THE NAVY NAVAL UNDERSEA WARFARE CENTER DIVISION NEWPORT OFFICE OF COUNSEL PHONE: 401 832-3653 FAX: 401 832-4432 DSN: 432-3653 Attorney Docket No. 85031 Date:
IMAVSBA WARFARE CENTERS NEWPORT DEPARTMENT OF THE NAVY NAVAL UNDERSEA WARFARE CENTER DIVISION NEWPORT OFFICE OF COUNSEL PHONE: 401 832-3653 FAX: 401 832-4432 DSN: 432-3653 Attorney Docket No. 85031 Date:
NOTICE. The above identified patent application is available for licensing. Requests for information should be addressed to:
 Serial Number 09/113.010 Filing Date 26 June 1998 Inventor Daniel M. Glenning Michael Visich NOTICE The above identified patent application is available for licensing. Requests for information should be
Serial Number 09/113.010 Filing Date 26 June 1998 Inventor Daniel M. Glenning Michael Visich NOTICE The above identified patent application is available for licensing. Requests for information should be
Right Whale Diving and Foraging Behavior in the Southwestern Gulf of Maine
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Right Whale Diving and Foraging Behavior in the Southwestern Gulf of Maine Mark Baumgartner Woods Hole Oceanographic Institution
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Right Whale Diving and Foraging Behavior in the Southwestern Gulf of Maine Mark Baumgartner Woods Hole Oceanographic Institution
Cruise Plan for QPE (R/V Revelle Sept/ 12-16, 2009)
") Cruise Plan for QPE (R/V Revelle Sept/ 12-16, 2009) Objectives In this cruise we will recover six subsurface ADCP/TC moorings (Lien), five restrained ADCP (Centurioni), and perform shipboard ADCP, Revelle
Cruise Plan for QPE (R/V Revelle Sept/ 12-16, 2009) Objectives In this cruise we will recover six subsurface ADCP/TC moorings (Lien), five restrained ADCP (Centurioni), and perform shipboard ADCP, Revelle
STOPPING THE UNDERWATER DIVER THREAT
 STOPPING THE UNDERWATER DIVER THREAT Dr. Robert F. De La Croix and Mr. Juergen G. Keil A non-lethal, scalable deterrent solution Updated from original article published in Maritime Technology Reporter,
STOPPING THE UNDERWATER DIVER THREAT Dr. Robert F. De La Croix and Mr. Juergen G. Keil A non-lethal, scalable deterrent solution Updated from original article published in Maritime Technology Reporter,
Location: Barkley Canyon Date: September 9, 2013 Constraints: none
 Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
The Next Generation Easy-to-Deploy (ETD) Tsunami Assessment Buoy
 Tsunami Assessment Buoy") The Next Generation Easy-to-Deploy (ETD) Tsunami Assessment Buoy R.A. Lawson and D. Graham Science Applications International Corporation 4025 Hancock Street San Diego, CA 92110 USA S. Stalin, C. Meinig,
The Next Generation Easy-to-Deploy (ETD) Tsunami Assessment Buoy R.A. Lawson and D. Graham Science Applications International Corporation 4025 Hancock Street San Diego, CA 92110 USA S. Stalin, C. Meinig,
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited.
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. The Effects of Behavioral Change in Response to Acoustic Disturbance on the Health of the Population of Blainville s Beaked
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. The Effects of Behavioral Change in Response to Acoustic Disturbance on the Health of the Population of Blainville s Beaked
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE.
 EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
EXPEDITION ADVENTURE PART 2: HIGHER RESOLUTION RANGE SEISMIC IMAGING TO LOCATE A SUNKEN PIRATE SHIP OFF ILE ST MARIE. Jakob B.U. Haldorsen, and Douglas E. Miller, Schlumberger-Doll Research, Ridgefield,
SEAHORSES and SUBMARINES Testing transformational capabilities with modern UUVs at NAVOCEANO by Craig A. Peterson and Martha E. M.
 SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters Vitalii A. Sheremet, Principal Investigator
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters Vitalii A. Sheremet, Principal Investigator
Draft of OKMC Cruise Plan (R/V Revelle June 1-14, 2012 RR1205)
") Draft of OKMC Cruise Plan (R/V Revelle June 1-14, 2012 RR1205) Ren-Chieh Lien and Thomas B Sanford 1. Objectives In the RR1205 cruise, we will deploy five subsurface moorings, one surface mooring (TBD),
Draft of OKMC Cruise Plan (R/V Revelle June 1-14, 2012 RR1205) Ren-Chieh Lien and Thomas B Sanford 1. Objectives In the RR1205 cruise, we will deploy five subsurface moorings, one surface mooring (TBD),
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling
 Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
Naval Research Laboratory Stennis Space Center, MS 39529-5004 NRL/MR/7182--08-9100 Examples of Carter Corrected DBDB-V Applied to Acoustic Propagation Modeling J. Paquin Fabre Acoustic Simulation, Measurements,
Cruise Report Marine Mammal and Sea Turtle Observer UNDET Monitoring Hawaii Range Complex: 3 April 2014
 January 15, 2015 Cruise Report Marine Mammal and Sea Turtle Observer UNDET Monitoring Hawaii Range Complex: 3 April 2014 Prepared for: Commander, U.S. Pacific Fleet Prepared by: Naval Facilities Engineering
January 15, 2015 Cruise Report Marine Mammal and Sea Turtle Observer UNDET Monitoring Hawaii Range Complex: 3 April 2014 Prepared for: Commander, U.S. Pacific Fleet Prepared by: Naval Facilities Engineering
Marine Mammal Mitigation Systems
 Marine Mammal Mitigation Systems Seiche Measurements Limited (Seiche) designs and manufactures underwater sound measurement and marine mammal monitoring equipment for the oil and gas and renewables sectors.
Marine Mammal Mitigation Systems Seiche Measurements Limited (Seiche) designs and manufactures underwater sound measurement and marine mammal monitoring equipment for the oil and gas and renewables sectors.
Original URI Scanfish MKII
 Scanfish MKII URI s Scanfish MKII Sensors include CTD, Fluorometer, Dissolved Oxygen and Seabird Fast Temperature and Conductivity Sensors logging at 400 Hz and sending 50 Hz data via 9600 Baud uplink
Scanfish MKII URI s Scanfish MKII Sensors include CTD, Fluorometer, Dissolved Oxygen and Seabird Fast Temperature and Conductivity Sensors logging at 400 Hz and sending 50 Hz data via 9600 Baud uplink
Providing Field Support for the Behavior Response Study (BRS-07)
") Providing Field Support for the Behavior Response Study (BRS-07) Diane Claridge Bahamas Marine Mammal Research Organization P.O. Box AB-20714, Marsh Harbour Abaco, Bahamas phone: (242) 366-4155 fax: (242)
Providing Field Support for the Behavior Response Study (BRS-07) Diane Claridge Bahamas Marine Mammal Research Organization P.O. Box AB-20714, Marsh Harbour Abaco, Bahamas phone: (242) 366-4155 fax: (242)
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited.
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Off-Range Beaked Whale Studies (ORBS): Baseline Data and Tagging Development for Northern Bottlenose Whales (Hyperoodon
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Off-Range Beaked Whale Studies (ORBS): Baseline Data and Tagging Development for Northern Bottlenose Whales (Hyperoodon
RV Southern Surveyor program
 2011 RV Southern Surveyor program voyageplan SS2011_c01 Tsunami Detection Buoy Maintenance for Australian Tsunami Warning System (ATWS) Itinerary Mobilise 0700 Sydney, Tuesday 5 April 2011 Depart Sydney
2011 RV Southern Surveyor program voyageplan SS2011_c01 Tsunami Detection Buoy Maintenance for Australian Tsunami Warning System (ATWS) Itinerary Mobilise 0700 Sydney, Tuesday 5 April 2011 Depart Sydney
South Bay Coastal Ocean Observing System California Clean Beaches Initiative
 South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report September 2003 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of
South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report September 2003 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of
Hydrographic Surveying Methods, Applications and Uses
 Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Delivery and Deployment of the U.S. Navy s Submarine Rescue System
 Delivery and Deployment of the U.S. Navy s Submarine Rescue System Andrew DeSpirito Advanced Undersea Systems Program Office (PMS394) Naval Sea Systems Command Agenda Submarine Rescue Diving and Recompression
Delivery and Deployment of the U.S. Navy s Submarine Rescue System Andrew DeSpirito Advanced Undersea Systems Program Office (PMS394) Naval Sea Systems Command Agenda Submarine Rescue Diving and Recompression
RESULTS FROM PARACHUTE SEA ANCHOR DRAG TESTS FOR A SPACE CAPSULE, Jan. 10, 2013
 FIORENTINO Technical Report FPA-152 Report Prepared for: America s next generation of spacecraft A spacecraft can be a diameter of 16.5-foot and weigh 18,000 lbs. at splashdown. When the parachute sea
FIORENTINO Technical Report FPA-152 Report Prepared for: America s next generation of spacecraft A spacecraft can be a diameter of 16.5-foot and weigh 18,000 lbs. at splashdown. When the parachute sea
NWEI. Fred.Olsen. Columbia Power
 U.S. Marine Corps Base Hawaii, Kaneohe 30m, 60m, 80m berths in place, grid-connected First device deployed, second Jan 2016, third Sep 2016 HNEI role Funded by DOE, US Navy, ONR, State of Hawaii Acoustic,
U.S. Marine Corps Base Hawaii, Kaneohe 30m, 60m, 80m berths in place, grid-connected First device deployed, second Jan 2016, third Sep 2016 HNEI role Funded by DOE, US Navy, ONR, State of Hawaii Acoustic,
Near-Field Sturgeon Monitoring for the New NY Bridge at Tappan Zee. Quarterly Report July 1 September 30, 2014
 Near-Field Sturgeon Monitoring for the New NY Bridge at Tappan Zee Quarterly Report July 1 September 30, 2014 Prepared by AKRF, Inc. 7250 Parkway Drive, Suite 210 Hanover, MD 21076 for New York State Thruway
Near-Field Sturgeon Monitoring for the New NY Bridge at Tappan Zee Quarterly Report July 1 September 30, 2014 Prepared by AKRF, Inc. 7250 Parkway Drive, Suite 210 Hanover, MD 21076 for New York State Thruway
Cruise Plan Seafloor Geodesy, Southern Juan de Fuca plate Sept 4-22, 2003
 Cruise Plan Seafloor Geodesy, Southern Juan de Fuca plate Sept 4-22, 2003 We will use the R.V. Roger Revelle to [1] deploy a direct- path transponder array across the ~1-km-wide axial valley of the south
Cruise Plan Seafloor Geodesy, Southern Juan de Fuca plate Sept 4-22, 2003 We will use the R.V. Roger Revelle to [1] deploy a direct- path transponder array across the ~1-km-wide axial valley of the south
Beaked Whale Group Deep Dive Behavior from Passive Acoustic Monitoring
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Beaked Whale Group Deep Dive Behavior from Passive Acoustic Monitoring Len Thomas, Tiago Marques Centre for Research into
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Beaked Whale Group Deep Dive Behavior from Passive Acoustic Monitoring Len Thomas, Tiago Marques Centre for Research into
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Troubleshooting Basics: Profiling CTDs
 Technical Note Troubleshooting Basics: Profiling CTDs Methods for Diagnosing Erratic and Unreasonable Data Greg Ikeda, October 2018 Introduction Any CTD or sensor may eventually exhibit data spikes and
Technical Note Troubleshooting Basics: Profiling CTDs Methods for Diagnosing Erratic and Unreasonable Data Greg Ikeda, October 2018 Introduction Any CTD or sensor may eventually exhibit data spikes and
Design and Development of an Autonomous Surface Watercraft
 Design and Development of an Autonomous Surface Watercraft Sponsor: Dr. D. Dunlap Advisor: Dr. J. Clark Instructors: Dr. N. Gupta, Dr. C. Shih Team 18: Kyle Ladyko, Donald Gahres, Samuel Nauditt, Teresa
Design and Development of an Autonomous Surface Watercraft Sponsor: Dr. D. Dunlap Advisor: Dr. J. Clark Instructors: Dr. N. Gupta, Dr. C. Shih Team 18: Kyle Ladyko, Donald Gahres, Samuel Nauditt, Teresa