Microprocessor Technology in Ankle Prosthetics
|
|
|
- Beverly Ramsey
- 5 years ago
- Views:
Transcription
1 Microprocessor Technology in Ankle Prosthetics Arizona State University Dr. Thomas Sugar Former Students LTC Joseph Hitt, PhD Dr. Kevin Hollander Dr. Matthew Holgate Dr. Jeffrey Ward Mr. Alex Boehler Mr. Ryan Bellman
2 Human Machine Integration Laboratory Design Unique Compliant Actuators Developing Powered Prosthetic Ankles Developing Exoskeletons for Running



3 Robotic Tendon drives a powered AFO Translating a spring back and forth to achieve the desired position and forces
4 Agenda The Robotic Tendon (RT) Designing SPARKy (Spring Ankle with Regenerative Kinetics)
5 Our goal: SPARKy (Spring Ankle with Regenerative Kinetics) Develop a new generation of powered prosthetic devices based on lightweight, energy storing springs that will allow for more functional gait.


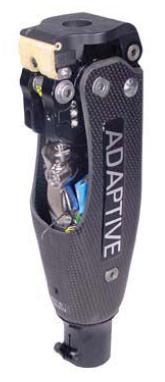


6 Microprocessor Controlled Prostheses The Endolite Adaptive Knee and the Otto Bock C-Leg Proprio Foot by Ossur PowerFoot by MIT and iwalk Robotic knee/ankle Goldfarb














7 Human Centric Approach to Wearable Robotics Human Centric Compliant Actuators Continuous Control System Efficiency

8 Robotic Tendon Based Ankle Powered Ankle Prosthetic Walking, Walk on inclines/declines, Walk backwards Ascend/Descend stairs, Jumping, Running

9 Robotic Tendon Based Ankle Powered Ankle Prosthetic Walking, Walk on inclines/declines, Walk backwards Ascend/Descend stairs, Jumping, Running

10 Studying Human Gait A single human walking gait cycle. Ankle angle and normalized moment data. The highlighted region is the push off phase of gait.
11 Passive Systems Passive and untunable. Provides minimal power generation (25% of AB) and ankle motion 15% of AB). No rotation at the ankle. No push-off at the ankle. Sagittal plane ankle angle, moment, and power for a male below the knee amputee using a SACH foot walking at 1.13 sec/step, solid line, versus that of an average able-bodied subject, dashed line.
12 Ankle Gait Analysis Dorsiflexion (Toes Up) Plantarflexion (Toes Down)
13 Ankle Gait Power Assumptions: 80 kg person, walking at 0.8 Hz (1.25 sec/cycle)
14 Robotic Tendon Concept Robot Tendon Concept x x F a K m g o Motor Power: P m F x g gait power F F K spring power
15


16 Robotic Tendon Actuator m Robotic Tendon
17 Why use springs? Springs are Powerful Springs are Efficient Springs are Lightweight Springs are Economical Springs are Compliant (308,000 W/kg) (0.999 for spring steel) ( 0.05 kg) (easily mass produced) (safety built-in )
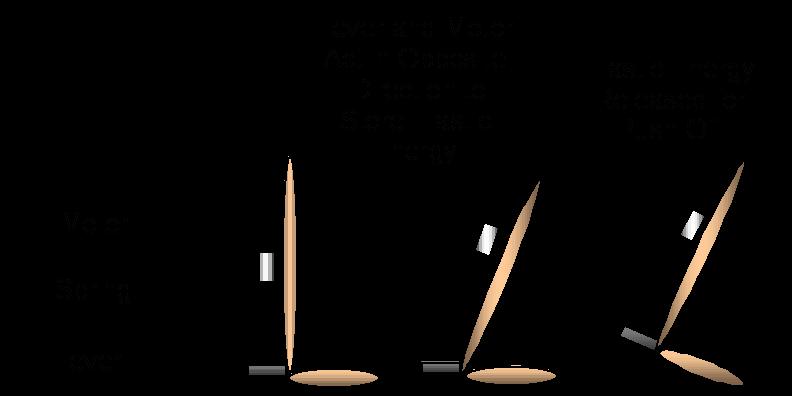
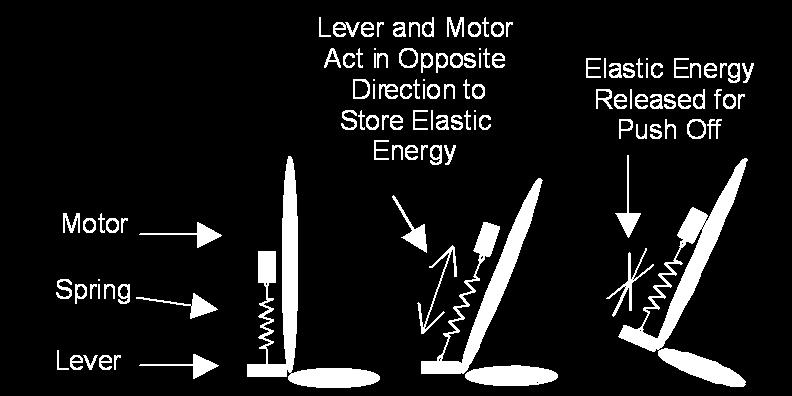
18 Power Decomposition The spring and motor power add to provide the desired output power required for gait. Notice that at 40% of gait, the spring and motor work in opposite direction to store elastic energy and at 50% gait, the spring provides majority of the output power.

19 Ankle Motion The subject walks on a treadmill at 2.2 mph. The ankle has 9 degrees of dorsiflexion and more importantly 23 degrees of plantarflexion. The user has complete control of the ankle motion because the output side of the spring is not controlled. The ankle motion fits the model extremely well.

20 Ankle Moment The ankle moment matches the model very well.
.")
21 Ankle Power The subject walks at 2.2 mph. Measured power out, Po, and power at the nut, Pm, for the test series with a 36KN/m spring and a 9 cm lever at 1 m/s (2.2 mph). The device achieves a very high level of power amplification of 3.7. This is the unique advantage of a Robotic Tendon.
22 Key Accomplishments User has full range of sagittal ankle motion comparable to able-bodied gait. (23 degrees of plantar-flexion, 7 degrees of dorsiflexion.) User has 100% of the required power for gait delivered at the correct time and magnitude. The peak output power is 3-4 times larger than the peak motor power allowing a reduction in motor size and weight. Allows a highly active amputee to regain high functionality and gait symmetry.

23 Design and Build SPARKy 2 Actuation: A Maxon RE40, 150 Watt motor, roller screw and helical spring assembly. Sensors: motor encoder, and ankle encoder, rate gyro FS 3000 Keel from Freedom Innovations. Robotic Tendon FS 3000 Keel Spring Ankle Joint Roller screw Lever arm RE 40 Motor

24 Electronic System Control Platform: Matlab, Simulink, Real Time Workshop Toolbox.
25 Electronic System Design Code using a Graphical Interface in Simulink/Matlab Use Specific Toolboxes for Device Hardware We use the Kerheul Toolbox for Microchip dspic processors Matlab Real Time Workshop generates C-Code automatically Download code using MPLAB
26 Solution A Robotic Tendon stores and releases energy during the gait cycle A tuned spring for a given individual reduces peak motor power and energy as compared to a traditional motor/gearbox system The proximal side of the spring uses robust position control
27 Vision Compliant Actuators: Study the kinematics and kinetics to use springs that are tuned to the body s movement Energy storage Reduce power/energy requirements Microprocessors: Easier to program and develop high-level control Very cost-effective Future BeagleBoards, Rasberry Pi.
TITLE: Spring Ankle with Regenerative Kinetics to build a new generation of transtibial prostheses
 AD Award Number: W81XWH-07-1-0193 TITLE: Spring Ankle with Regenerative Kinetics to build a new generation of transtibial prostheses PRINCIPAL INVESTIGATOR: Thomas G. Sugar, Ph.D. CONTRACTING ORGANIZATION:
AD Award Number: W81XWH-07-1-0193 TITLE: Spring Ankle with Regenerative Kinetics to build a new generation of transtibial prostheses PRINCIPAL INVESTIGATOR: Thomas G. Sugar, Ph.D. CONTRACTING ORGANIZATION:
The Starting Point. Prosthetic Alignment in the Transtibial Amputee. Outline. COM Motion in the Coronal Plane
 Prosthetic Alignment in the Transtibial Amputee The Starting Point David C. Morgenroth, MD, Department of Rehabilitation Medicine University of Washington VAPSHCS Outline COM Motion in the Coronal Plane
Prosthetic Alignment in the Transtibial Amputee The Starting Point David C. Morgenroth, MD, Department of Rehabilitation Medicine University of Washington VAPSHCS Outline COM Motion in the Coronal Plane
EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT
 EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT PROJECT REFERENCE NO. : 37S0925 COLLEGE : NEW HORIZON COLLEGE OF ENGINEERING, BANGALORE BRANCH : MECHANICAL ENGINEERING GUIDES : DR GANESHA PRASAD
EXPERIMENTAL STUDY OF EXOSKELETON FOR ANKLE AND KNEE JOINT PROJECT REFERENCE NO. : 37S0925 COLLEGE : NEW HORIZON COLLEGE OF ENGINEERING, BANGALORE BRANCH : MECHANICAL ENGINEERING GUIDES : DR GANESHA PRASAD
Life Without Limitations
 Mobility Grades Product Selection Life Without Limitations Presenter: Matt Henderson Ossur Asia Pacific Agenda What is missing? K Level Review Required features for given K Levels A Look at Specific Products
Mobility Grades Product Selection Life Without Limitations Presenter: Matt Henderson Ossur Asia Pacific Agenda What is missing? K Level Review Required features for given K Levels A Look at Specific Products
Power Assessment of the Human Ankle during the Stance Phase of Walking for Designing a Safe Active Prosthesis in Below-Knee Amputees
 Applied and Computational Mathematics 2015; 4(2-1): 7-11 Published online February 27, 2015 (http://www.sciencepublishinggroup.com/j/acm) doi: 10.11648/j.acm.s.2015040201.12 ISSN: 2328-5605 (Print); ISSN:
Applied and Computational Mathematics 2015; 4(2-1): 7-11 Published online February 27, 2015 (http://www.sciencepublishinggroup.com/j/acm) doi: 10.11648/j.acm.s.2015040201.12 ISSN: 2328-5605 (Print); ISSN:
Conceptual Design of an Energy Efficient Transfemoral Prosthesis
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Conceptual Design of an Energy Efficient Transfemoral Prosthesis R. Unal, R. Carloni, E.E.G.
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Conceptual Design of an Energy Efficient Transfemoral Prosthesis R. Unal, R. Carloni, E.E.G.
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
SYMBIONIC LEG 3 INTRODUCTION KEY FEATURES ÖSSUR DYNAMIC SOLUTIONS
 INTRODUCTION Featuring the latest advances in Bionic Technology by Össur, SYMBIONIC LEG 3 is the next generation of integrated prosthetic devices that combines a microprocessor knee and powered microprocessor
INTRODUCTION Featuring the latest advances in Bionic Technology by Össur, SYMBIONIC LEG 3 is the next generation of integrated prosthetic devices that combines a microprocessor knee and powered microprocessor
Active Orthosis for Ankle Articulation Pathologies
 Active Orthosis for Ankle Articulation Pathologies Carlos André Freitas Vasconcelos IST, Universidade Técnica de Lisboa Av. Rovisco Pais, 1049-001 Lisboa, Portugal Email: cafv@mail.com Abstract This work
Active Orthosis for Ankle Articulation Pathologies Carlos André Freitas Vasconcelos IST, Universidade Técnica de Lisboa Av. Rovisco Pais, 1049-001 Lisboa, Portugal Email: cafv@mail.com Abstract This work
-Elastic strain energy (duty factor decreases at higher speeds). Higher forces act on feet. More tendon stretch. More energy stored in tendon.
. Higher forces act on feet. More tendon stretch. More energy stored in tendon.") As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
1B1 Meridium. Reclaim your way. Information for practitioners. Meridium Ottobock 1
 1B1 Meridium Reclaim your way. Information for practitioners Meridium Ottobock 1 Reclaim your way. With the development of the individualized Meridium prosthetic foot, Ottobock has incorporated the latest
1B1 Meridium Reclaim your way. Information for practitioners Meridium Ottobock 1 Reclaim your way. With the development of the individualized Meridium prosthetic foot, Ottobock has incorporated the latest
3 people 3 unique lifestyles 3 advanced foot solutions
 3 people 3 unique lifestyles 3 advanced foot solutions Reclaim your life Information for practitioners Shelby Hans Intelligent feet are made for more than just walking Today s advanced microprocessor controlled
3 people 3 unique lifestyles 3 advanced foot solutions Reclaim your life Information for practitioners Shelby Hans Intelligent feet are made for more than just walking Today s advanced microprocessor controlled
Mechanical Knee Prescription Guide
 Mechanical Knee Prescription Guide CONTENTS K1 LOCKING KNEE 1 K1 - K2 BALANCE KNEE OFM1 2 BALANCE KNEE OFM2 3 K2 BALANCE KNEE OM8 4 TOTAL KNEE 1900 5 K2 - K3 OP2 KNEE 6 OP4 KNEE 7 OP5 KNEE 8 OHP3 KNEE
Mechanical Knee Prescription Guide CONTENTS K1 LOCKING KNEE 1 K1 - K2 BALANCE KNEE OFM1 2 BALANCE KNEE OFM2 3 K2 BALANCE KNEE OM8 4 TOTAL KNEE 1900 5 K2 - K3 OP2 KNEE 6 OP4 KNEE 7 OP5 KNEE 8 OHP3 KNEE
Serve the only stroke in which the player has full control over its outcome. Bahamonde (2000) The higher the velocity, the smaller the margin of
 The higher the velocity, the smaller the margin of") Lower Extremity Performance of Tennis Serve Reporter: Chin-Fu Hsu Adviser: Lin-Hwa Wang OUTLINE Introduction Kinetic Chain Serve Types Lower Extremity Movement Summary Future Work INTRODUCTION Serve the
Lower Extremity Performance of Tennis Serve Reporter: Chin-Fu Hsu Adviser: Lin-Hwa Wang OUTLINE Introduction Kinetic Chain Serve Types Lower Extremity Movement Summary Future Work INTRODUCTION Serve the
PROPRIO FOOT INTRODUCTION KEY FEATURES ÖSSUR DYNAMIC SOLUTIONS
 INTRODUCTION PROPRIO FOOT is an adaptive prosthetic device for low to moderately active below-knee amputees that mimics natural foot motion. Motor-powered ankle motion increases ground clearance and reduces
INTRODUCTION PROPRIO FOOT is an adaptive prosthetic device for low to moderately active below-knee amputees that mimics natural foot motion. Motor-powered ankle motion increases ground clearance and reduces
empower Reclaim your power. Information for technicians empower Ottobock 1
 empower Reclaim your power. Information for technicians empower Ottobock 1 empower Powered propulsion for more freedom in life The empower Ankle is an innovation in the field of prosthetic feet. It is
empower Reclaim your power. Information for technicians empower Ottobock 1 empower Powered propulsion for more freedom in life The empower Ankle is an innovation in the field of prosthetic feet. It is
Increasing ankle push-off work with a powered prosthesis does not necessarily reduce metabolic rate for transtibial amputees
 Supplementary Materials Increasing ankle push-off work with a powered prosthesis does not necessarily reduce metabolic rate for transtibial amputees Roberto E. Quesada, Joshua M. Caputo,, and Steven H.
Supplementary Materials Increasing ankle push-off work with a powered prosthesis does not necessarily reduce metabolic rate for transtibial amputees Roberto E. Quesada, Joshua M. Caputo,, and Steven H.
Empower. Reclaim your power. Information for technicians. Empower Ottobock 1
 Empower Reclaim your power. Information for technicians Empower Ottobock 1 Empower Powered propulsion for more freedom in life The Empower is an innovation in the field of prosthetic feet. It is equipped
Empower Reclaim your power. Information for technicians Empower Ottobock 1 Empower Powered propulsion for more freedom in life The Empower is an innovation in the field of prosthetic feet. It is equipped
Palacký Univerzity in Olomouc Faculty of Physical Culture
 Project: Sophisticated biomechanic diagnostics of human movement Registration number: CZ.1.07/2.3.00/09.0209 Palacký Univerzity in Olomouc Faculty of Physical Culture Tento projekt je spolufinancován Evropským
Project: Sophisticated biomechanic diagnostics of human movement Registration number: CZ.1.07/2.3.00/09.0209 Palacký Univerzity in Olomouc Faculty of Physical Culture Tento projekt je spolufinancován Evropským
X-ible Flexure joints. SNAPstop Plantar flexion stop. Information for practitioners
 X-ible Flexure joints SNAPstop Plantar flexion stop Information for practitioners The 17AF10 X-ible joint is a self-aligning, flexible joint featuring a free-motion or dorsal-assist function. By offering
X-ible Flexure joints SNAPstop Plantar flexion stop Information for practitioners The 17AF10 X-ible joint is a self-aligning, flexible joint featuring a free-motion or dorsal-assist function. By offering
@ Massachusetts Institute of Technology All rights reserved.
 Variable Damping Controller for a Prosthetic Knee during Swing Extension by Luke Matthewson Mooney Submitted to the Department of Mechanical Engineering ARCHIVES in partial fulfillment of the requirements
Variable Damping Controller for a Prosthetic Knee during Swing Extension by Luke Matthewson Mooney Submitted to the Department of Mechanical Engineering ARCHIVES in partial fulfillment of the requirements
Robotic Augmentation. Of Human Locomotion. For High Speed Running. Jason Kerestes
 Robotic Augmentation Of Human Locomotion For High Speed Running by Jason Kerestes A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science Approved November 2014 by
Robotic Augmentation Of Human Locomotion For High Speed Running by Jason Kerestes A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science Approved November 2014 by
Skippy: Reaching for the Performance Envelope
 Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
G-EOL. Discover the simplicity of gait therapy intended for daily use
 G-EOL Discover the simplicity of gait therapy intended for daily use Reha Technology a passion for robotic-assisted gait therapy For over 10 years, Reha Technology has been successfully developing innovative,
G-EOL Discover the simplicity of gait therapy intended for daily use Reha Technology a passion for robotic-assisted gait therapy For over 10 years, Reha Technology has been successfully developing innovative,
Meridium. Reclaim your way. Information for clinicians
 Meridium Reclaim your way. Information for clinicians Reclaim your way. With the development of the individualised Meridium prosthetic foot, Ottobock has incorporated the latest technology to achieve a
Meridium Reclaim your way. Information for clinicians Reclaim your way. With the development of the individualised Meridium prosthetic foot, Ottobock has incorporated the latest technology to achieve a
1C11 Terion K2. Confidence with every step. Information for Practitioners
 1C11 Terion K2 Confidence with every step Information for Practitioners Confidence with every step For prosthesis users who need a high level of stability With the 1C11 Terion K2, Ottobock has developed
1C11 Terion K2 Confidence with every step Information for Practitioners Confidence with every step For prosthesis users who need a high level of stability With the 1C11 Terion K2, Ottobock has developed
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53. The design of exoskeleton lower limbs rehabilitation robot
 Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
SCHEINWORKS Measuring and Analysis Systems by
 Pressure Measurement Systems for standing and walking analysis Germany since 1879 Pressure Measurement Systems for standing and walking analysis Documentation of Gait image Stance Symmetry of all parameters
Pressure Measurement Systems for standing and walking analysis Germany since 1879 Pressure Measurement Systems for standing and walking analysis Documentation of Gait image Stance Symmetry of all parameters
ASSESMENT Introduction REPORTS Running Reports Walking Reports Written Report
 ASSESMENT REPORTS Introduction Left panel Avatar Playback Right Panel Patient Gait Parameters Report Tab Click on parameter to view avatar at that point in time 2 Introduction Software will compare gait
ASSESMENT REPORTS Introduction Left panel Avatar Playback Right Panel Patient Gait Parameters Report Tab Click on parameter to view avatar at that point in time 2 Introduction Software will compare gait
Adaptation to Knee Flexion Torque Assistance in Double Support Phase
 Adaptation to Knee Flexion Torque Assistance in Double Support Phase James S. Sulzer, Keith E. Gordon, T. George Hornby, Michael A. Peshkin and James L. Patton Abstract Studies have shown locomotor adaptation
Adaptation to Knee Flexion Torque Assistance in Double Support Phase James S. Sulzer, Keith E. Gordon, T. George Hornby, Michael A. Peshkin and James L. Patton Abstract Studies have shown locomotor adaptation
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system
 An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
An investigation of kinematic and kinetic variables for the description of prosthetic gait using the ENOCH system K. OBERG and H. LANSHAMMAR* Amputee Training and Research Unit, University Hospital, Fack,
GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF
 GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF Sara Gharabaghli, Rebecca Krogstad, Sara Lynch, Sofia Saavedra, and Tamara Wright California State University, San Marcos, San Marcos,
GROUND REACTION FORCE DOMINANT VERSUS NON-DOMINANT SINGLE LEG STEP OFF Sara Gharabaghli, Rebecca Krogstad, Sara Lynch, Sofia Saavedra, and Tamara Wright California State University, San Marcos, San Marcos,
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Design and Evaluation of a Variable Resistance Orthotic Knee Joint
 Design and Evaluation of a Variable Resistance Orthotic Knee Joint Andrew Herbert-Copley Thesis submitted to the faculty of graduate and postdoctoral studies in partial fulfillment of the requirements
Design and Evaluation of a Variable Resistance Orthotic Knee Joint Andrew Herbert-Copley Thesis submitted to the faculty of graduate and postdoctoral studies in partial fulfillment of the requirements
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices
 A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
A Neuromuscular Model of Human Locomotion and its Applications to Robotic Devices The 10th Workshop on Humanoid Soccer Robots at 15th IEEE-RAS International Conference on Humanoid Robots Nov 3, 2015 Seungmoon
Normal and Abnormal Gait
 Normal and Abnormal Gait Adrielle Fry, MD EvergreenHealth, Division of Sport and Spine University of Washington Board Review Course March 6, 2017 What are we going to cover? Definitions and key concepts
Normal and Abnormal Gait Adrielle Fry, MD EvergreenHealth, Division of Sport and Spine University of Washington Board Review Course March 6, 2017 What are we going to cover? Definitions and key concepts
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Functional Outcomes of a Custom, Energy Harvesting "Bullfrog" AFO
 Functional Outcomes of a Custom, Energy Harvesting "Bullfrog" AFO Principal Investigator Géza F. Kogler, Ph.D., C.O. Co-Principal Investigator Young-Hui Chang, Ph.D. Co-Investigators Hosna Sharafi, BME
Functional Outcomes of a Custom, Energy Harvesting "Bullfrog" AFO Principal Investigator Géza F. Kogler, Ph.D., C.O. Co-Principal Investigator Young-Hui Chang, Ph.D. Co-Investigators Hosna Sharafi, BME
Positive running posture sums up the right technique for top speed
 Positive running, a model for high speed running Frans Bosch positive running posture sums up the right technique for top speed building blocks in running: Pelvic rotation for- and backward and hamstring
Positive running, a model for high speed running Frans Bosch positive running posture sums up the right technique for top speed building blocks in running: Pelvic rotation for- and backward and hamstring
C-Brace Orthotronic Mobility System
 C-Brace Orthotronic Mobility System You ll always remember your first step Information for practitioners C-Brace Orthotics reinvented Until now, you and your patients with conditions like incomplete spinal
C-Brace Orthotronic Mobility System You ll always remember your first step Information for practitioners C-Brace Orthotics reinvented Until now, you and your patients with conditions like incomplete spinal
PRO-FLEX. Less load, more dynamics
 PRO-FLEX Less load, more dynamics CARBON Unique Pivot Technology and ankle torque deliver 27º ankle motion with progressive stiffness for a more physiological gait. Immediate adaptation to ramps, stairs
PRO-FLEX Less load, more dynamics CARBON Unique Pivot Technology and ankle torque deliver 27º ankle motion with progressive stiffness for a more physiological gait. Immediate adaptation to ramps, stairs
Aeris Performance 2. Product Manual
 Aeris Performance 2 Product Manual Instructions The Aeris Performance 2 is designed to be maintenance free. The foot is water resistant; however, if the foot is submerged in water, the foot and foot shell
Aeris Performance 2 Product Manual Instructions The Aeris Performance 2 is designed to be maintenance free. The foot is water resistant; however, if the foot is submerged in water, the foot and foot shell
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Continuous-Phase Control of a Powered Knee-Ankle Prosthesis: Amputee Experiments Across Speeds and Inclines
 Continuous-Phase Control of a Powered Knee-Ankle Prosthesis: Amputee Experiments Across Speeds and Inclines David Quintero 1,2, Student Member, IEEE, Dario J. Villarreal 3, Student Member, IEEE, Daniel
Continuous-Phase Control of a Powered Knee-Ankle Prosthesis: Amputee Experiments Across Speeds and Inclines David Quintero 1,2, Student Member, IEEE, Dario J. Villarreal 3, Student Member, IEEE, Daniel
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis.
 Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis. D.Moser, N.Stech, J.McCarthy, G.Harris, S.Zahedi, A.McDougall Summary This study reports
Analysis of ankle kinetics and energy consumption with an advanced microprocessor controlled ankle foot prosthesis. D.Moser, N.Stech, J.McCarthy, G.Harris, S.Zahedi, A.McDougall Summary This study reports
Normal Gait and Dynamic Function purpose of the foot in ambulation. Normal Gait and Dynamic Function purpose of the foot in ambulation
 Normal Gait and Dynamic Function purpose of the foot in ambulation Edward P. Mulligan, PT, DPT, OCS, SCS, ATC Assistant Professor; Residency Chair UT Southwestern School of Health Professions Department
Normal Gait and Dynamic Function purpose of the foot in ambulation Edward P. Mulligan, PT, DPT, OCS, SCS, ATC Assistant Professor; Residency Chair UT Southwestern School of Health Professions Department
Lab 7 Rotational Equilibrium - Torques
 Lab 7 Rotational Equilibrium - Torques Objective: < To test the hypothesis that a body in rotational equilibrium is subject to a net zero torque and to determine the typical tension force that the biceps
Lab 7 Rotational Equilibrium - Torques Objective: < To test the hypothesis that a body in rotational equilibrium is subject to a net zero torque and to determine the typical tension force that the biceps
In this course you will learn the following
 Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
Module 11 : Example study of robots Lecture 40 : NATARAJ a case study of a 6-legged robot Objectives In this course you will learn the following Mobile Robots Legged Robots Nataraj Robot Nataraj Development
An Ankle-Foot Prosthesis Emulator with Control of Plantarflexion and Inversion-Eversion Torques
 An Ankle-Foot Prosthesis Emulator with Control of Plantarflexion and Inversion-Eversion Torques Steven H. Collins,1,2,, Myunghee Kim,1, Tianjian Chen 1, and Tianyao Chen 3 Abstract Ankle inversion-eversion
An Ankle-Foot Prosthesis Emulator with Control of Plantarflexion and Inversion-Eversion Torques Steven H. Collins,1,2,, Myunghee Kim,1, Tianjian Chen 1, and Tianyao Chen 3 Abstract Ankle inversion-eversion
MOTION FOOT MX. Manual
 MOTION FOOT MX Manual Real Technology - Real People CONTENTS Intruduction....4 Patient Selection....4 Foot Components....4 Special Precautions....5 Set-Up....6 Change Heel Height & Dorsi Flexion Range....
MOTION FOOT MX Manual Real Technology - Real People CONTENTS Intruduction....4 Patient Selection....4 Foot Components....4 Special Precautions....5 Set-Up....6 Change Heel Height & Dorsi Flexion Range....
C-Brace Reimbursement Guide
 Reimbursement Guide Information for practitioners and payers Product Information Effective September 24, 2018 The The is the first microprocessor stance and swing phase controlled orthosis (SSCO ). This
Reimbursement Guide Information for practitioners and payers Product Information Effective September 24, 2018 The The is the first microprocessor stance and swing phase controlled orthosis (SSCO ). This
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Ideal Heel Promotes proper alignment and reduces lever arms
 IDEAL Technologies Ideal Heel Promotes proper alignment and reduces lever arms The Ideal Heel is an innovation that shifts the ground contact point forward. The runner lands with more ground clearance
IDEAL Technologies Ideal Heel Promotes proper alignment and reduces lever arms The Ideal Heel is an innovation that shifts the ground contact point forward. The runner lands with more ground clearance
Simulation-based design to reduce metabolic cost
 Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
Simulation-based design to reduce metabolic cost Overview: Lecture + Hands On Exercise 1. Generating and evaluating a muscledriven simulation of walking 2. Metabolics 101 3. Designing and evaluating devices
An autonomous, underactuated exoskeleton for loadcarrying augmentation
 Proceedings of the 26 IEEE/RSJ International Conference on Intelligent Robots and Systems October 9-15, 26, Beijing, China An autonomous, underactuated exoskeleton for loadcarrying augmentation Conor James
Proceedings of the 26 IEEE/RSJ International Conference on Intelligent Robots and Systems October 9-15, 26, Beijing, China An autonomous, underactuated exoskeleton for loadcarrying augmentation Conor James
Finite-State Control of Powered Below-Knee Prosthesis with Ankle and Toe
 Finite-State Control of Powered Below-Knee Prosthesis with Ankle and Toe Kebin Yuan, Jinying Zhu, Qining Wang, Long Wang Intelligent Control Laboratory, College of Engineering, Peking University, Beijing
Finite-State Control of Powered Below-Knee Prosthesis with Ankle and Toe Kebin Yuan, Jinying Zhu, Qining Wang, Long Wang Intelligent Control Laboratory, College of Engineering, Peking University, Beijing
Problem 5: Platform Diving
 Problem 5: Platform Diving In the 22 World Cup Trials, Kyle Prandi set up a diving record with a back 3 ½ somersault pike from the 1 m board. He pushed off from the board at an angle of θ = 46 with an
Problem 5: Platform Diving In the 22 World Cup Trials, Kyle Prandi set up a diving record with a back 3 ½ somersault pike from the 1 m board. He pushed off from the board at an angle of θ = 46 with an
A CONTINOUS ROTARY ACTUATION MECHANISM FOR A POWERED HIP EXOSKELETON
 University of Massachusetts Amherst ScholarWorks@UMass Amherst Masters Theses Dissertations and Theses 2015 A CONTINOUS ROTARY ACTUATION MECHANISM FOR A POWERED HIP EXOSKELETON Matthew C. Ryder University
University of Massachusetts Amherst ScholarWorks@UMass Amherst Masters Theses Dissertations and Theses 2015 A CONTINOUS ROTARY ACTUATION MECHANISM FOR A POWERED HIP EXOSKELETON Matthew C. Ryder University
Design of Variable-Damping Control for Prosthetic Knee based on a Simulated Biped
 Design of Variable-Damping Control for Prosthetic Knee based on a Simulated Biped Jie Zhao, Karsten Berns, Roberto de Souza Baptista, Antônio Padilha L. Bó Robotics Research Lab, Department of Computer
Design of Variable-Damping Control for Prosthetic Knee based on a Simulated Biped Jie Zhao, Karsten Berns, Roberto de Souza Baptista, Antônio Padilha L. Bó Robotics Research Lab, Department of Computer
Gait analysis for the development of the biped robot foot structure
 Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Dynamic Warm up. the age of the athlete current physical condition and prior exercise experience
 Dynamic Warm up 10-20 minutes May be dependent on: the age of the athlete current physical condition and prior exercise experience Prepares the body for the demands of a work out or practice Increases
Dynamic Warm up 10-20 minutes May be dependent on: the age of the athlete current physical condition and prior exercise experience Prepares the body for the demands of a work out or practice Increases
Element DS. Product Manual
 Element DS Product Manual Instructions The Element DS is designed to be maintenance free. The foot is water resistant; however, if the foot is submerged in water, the foot and foot shell should be rinsed
Element DS Product Manual Instructions The Element DS is designed to be maintenance free. The foot is water resistant; however, if the foot is submerged in water, the foot and foot shell should be rinsed
DYNAMIC. Make your move SOLUTIONS. Stable enough for Mike. Dynamic enough for Nuria.
 DYNAMIC SOLUTIONS Make your move Stable enough for Mike. Dynamic enough for Nuria. ÖSSUR DYNAMIC SOLUTIONS Reassuring stability for Mike empowering dynamics for Nuria Not everyone s priorities are the
DYNAMIC SOLUTIONS Make your move Stable enough for Mike. Dynamic enough for Nuria. ÖSSUR DYNAMIC SOLUTIONS Reassuring stability for Mike empowering dynamics for Nuria Not everyone s priorities are the
Purpose. Outline. Angle definition. Objectives:
 Disclosure Information AACPDM 69 th Annual Meeting October 21-24, 2015 Speaker Names: Sylvia Õunpuu, MSc and Kristan Pierz, MD Gait Analysis Data Interpretation: Understanding Kinematic Relationships Within
Disclosure Information AACPDM 69 th Annual Meeting October 21-24, 2015 Speaker Names: Sylvia Õunpuu, MSc and Kristan Pierz, MD Gait Analysis Data Interpretation: Understanding Kinematic Relationships Within
A Biomechanical Approach to Javelin. Blake Vajgrt. Concordia University. December 5 th, 2012
 A Biomechanical Approach to Javelin Blake Vajgrt Concordia University December 5 th, 2012 The Biomechanical Approach to Javelin 2 The Biomechanical Approach to Javelin Javelin is one of the four throwing
A Biomechanical Approach to Javelin Blake Vajgrt Concordia University December 5 th, 2012 The Biomechanical Approach to Javelin 2 The Biomechanical Approach to Javelin Javelin is one of the four throwing
From early rehab to full recovery RHEO KNEE XC. go anywhere
 From early rehab to full recovery RHEO KNEE XC go anywhere FROM EARLY REHAB TO FULL RECOVERY, GO ANYWHERE The capabilities that make RHEO KNEE XC dynamic for work and home also make it safe and effective
From early rehab to full recovery RHEO KNEE XC go anywhere FROM EARLY REHAB TO FULL RECOVERY, GO ANYWHERE The capabilities that make RHEO KNEE XC dynamic for work and home also make it safe and effective
KICKBIKE Your key to optimum sports performance
 KICKBIKE Your key to optimum sports performance Efficient Running is essential to optimum performance of most sports we play. Whether we want to maximize our speed, maximize our endurance, or both, an
KICKBIKE Your key to optimum sports performance Efficient Running is essential to optimum performance of most sports we play. Whether we want to maximize our speed, maximize our endurance, or both, an
RUNNING SHOE STIFFNESS: THE EFFECT ON WALKING GAIT
 RUNNING SHOE STIFFNESS: THE EFFECT ON WALKING GAIT Stephen N Stanley, Peter J M c Nair, Angela G Walker, & Robert N Marshall Auckland Institute of Technology, Auckland, New Zealand University of Auckland,
RUNNING SHOE STIFFNESS: THE EFFECT ON WALKING GAIT Stephen N Stanley, Peter J M c Nair, Angela G Walker, & Robert N Marshall Auckland Institute of Technology, Auckland, New Zealand University of Auckland,
Steffen Willwacher, Katina Fischer, Gert Peter Brüggemann Institute of Biomechanics and Orthopaedics, German Sport University, Cologne, Germany
 P01-3 ID126 SURFACE STIFFNESS AFFECTS JOINT LOADING IN RUNNING Steffen Willwacher, Katina Fischer, Gert Peter Brüggemann Institute of Biomechanics and Orthopaedics, German Sport University, Cologne, Germany
P01-3 ID126 SURFACE STIFFNESS AFFECTS JOINT LOADING IN RUNNING Steffen Willwacher, Katina Fischer, Gert Peter Brüggemann Institute of Biomechanics and Orthopaedics, German Sport University, Cologne, Germany
Kintrol Instructions for Use Product Number: VS4
 Kintrol Instructions for Use Product Number: VS4 Introduction The Kintrol foot/ankle combines hydraulics and fiberglass to provide K2 ambulators an exceptionally normal walking gait regardless of surface
Kintrol Instructions for Use Product Number: VS4 Introduction The Kintrol foot/ankle combines hydraulics and fiberglass to provide K2 ambulators an exceptionally normal walking gait regardless of surface
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg. Abstract
 Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Design and control of Ranger: an energy-efficient, dynamic walking robot
 1 Design and control of Ranger: an energy-efficient, dynamic walking robot Pranav A. Bhounsule, Jason Cortell and Andy Ruina Biorobotics and Locomotion Laboratory, 306 Kimball Hall, Cornell University,
1 Design and control of Ranger: an energy-efficient, dynamic walking robot Pranav A. Bhounsule, Jason Cortell and Andy Ruina Biorobotics and Locomotion Laboratory, 306 Kimball Hall, Cornell University,
Coaching the Triple Jump Boo Schexnayder
 I. Understanding the Event A. The Run and Its Purpose B. Hip Undulation and the Phases C. Making the Connection II. III. IV. The Approach Run A. Phases B. Technical Features 1. Posture 2. Progressive Body
I. Understanding the Event A. The Run and Its Purpose B. Hip Undulation and the Phases C. Making the Connection II. III. IV. The Approach Run A. Phases B. Technical Features 1. Posture 2. Progressive Body
Written Report of Robot Design
 Written Report of Robot Design Name: Robot Name: Course: Shaojie Ge Four Leg Walking Robot EEL 4665/5666 Intelligent Machines Design Laboratory Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs:
Written Report of Robot Design Name: Robot Name: Course: Shaojie Ge Four Leg Walking Robot EEL 4665/5666 Intelligent Machines Design Laboratory Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs:
BIOMECHANICAL EFFECTS OF A ROBOTIC KNEE EXOSKELETON DURING SLOPE WALKING
 BIOMECHANICAL EFFECTS OF A ROBOTIC KNEE EXOSKELETON DURING SLOPE WALKING A Dissertation Presented to The Academic Faculty by Dawit Lee In Partial Fulfillment of the Requirements for the Degree Master of
BIOMECHANICAL EFFECTS OF A ROBOTIC KNEE EXOSKELETON DURING SLOPE WALKING A Dissertation Presented to The Academic Faculty by Dawit Lee In Partial Fulfillment of the Requirements for the Degree Master of
Prosthetic Solutions for Active Amputees. Andreas Kannenberg, MD, PhD Executive Medical Director North America, Austin, TX, USA
 Prosthetic Solutions for Active Amputees Andreas Kannenberg, MD, PhD Executive Medical Director North America, Austin, TX, USA Technology is progressing faster than ever before Phone and audio 25 years
Prosthetic Solutions for Active Amputees Andreas Kannenberg, MD, PhD Executive Medical Director North America, Austin, TX, USA Technology is progressing faster than ever before Phone and audio 25 years
Fuel Efficiency of a Portable Powered Ankle-Foot Orthosis
 2013 IEEE International Conference on Rehabilitation Robotics June 24-26, 2013 Seattle, Washington USA Fuel Efficiency of a Portable Powered Ankle-Foot Orthosis Morgan K. Boes Bioengineering Department
2013 IEEE International Conference on Rehabilitation Robotics June 24-26, 2013 Seattle, Washington USA Fuel Efficiency of a Portable Powered Ankle-Foot Orthosis Morgan K. Boes Bioengineering Department
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
C-Brace Reimbursement Guide
 C-Brace Reimbursement Guide Information for practitioners and payers Product Information The C-Brace The C-Brace is the first microprocessor stance and swing phase controlled orthosis (SSCO). This highly
C-Brace Reimbursement Guide Information for practitioners and payers Product Information The C-Brace The C-Brace is the first microprocessor stance and swing phase controlled orthosis (SSCO). This highly
Available online at Prediction of energy efficient pedal forces in cycling using musculoskeletal simulation models
 Available online at www.sciencedirect.com Engineering 2 00 (2010) (2009) 3211 3215 000 000 Engineering www.elsevier.com/locate/procedia 8 th Conference of the International Sports Engineering Association
Available online at www.sciencedirect.com Engineering 2 00 (2010) (2009) 3211 3215 000 000 Engineering www.elsevier.com/locate/procedia 8 th Conference of the International Sports Engineering Association
Continuous sweep versus discrete step protocols for studying effects of wearable robot assistance magnitude
 Malcolm et al. Journal of NeuroEngineering and Rehabilitation (2017) 14:72 DOI 10.1186/s12984-017-0278-2 RESEARCH Continuous sweep versus discrete step protocols for studying effects of wearable robot
Malcolm et al. Journal of NeuroEngineering and Rehabilitation (2017) 14:72 DOI 10.1186/s12984-017-0278-2 RESEARCH Continuous sweep versus discrete step protocols for studying effects of wearable robot
Body Stabilization of PDW toward Humanoid Walking
 Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Biomechanics and the Rules of Race Walking. Brian Hanley
 Biomechanics and the Rules of Race Walking Brian Hanley Biomechanics and the Rules of Race Walking Brian Hanley b.hanley@leedsmet.ac.uk www.evaa.ch The rules and judging Judging is probably the most contentious
Biomechanics and the Rules of Race Walking Brian Hanley Biomechanics and the Rules of Race Walking Brian Hanley b.hanley@leedsmet.ac.uk www.evaa.ch The rules and judging Judging is probably the most contentious
Once-per-step control of ankle-foot prosthesis push-off work reduces effort associated with balance during walking
 Kim et al. Journal of NeuroEngineering and Rehabilitation (2015) 12:43 DOI 10.1186/s12984-015-0027-3 JOURNAL OF NEUROENGINEERING JNERAND REHABILITATION RESEARCH Open Access Once-per-step control of ankle-foot
Kim et al. Journal of NeuroEngineering and Rehabilitation (2015) 12:43 DOI 10.1186/s12984-015-0027-3 JOURNAL OF NEUROENGINEERING JNERAND REHABILITATION RESEARCH Open Access Once-per-step control of ankle-foot
07/08/2017. Goalkeepers (GK) in soccer. Goal kicking of soccer? Previous study. The goal kicking of professional GK. Introduction
 in soccer. Goal kicking of soccer? Previous study. The goal kicking of professional GK. Introduction") ICCE Global Coach Conference 2017 31th July 2017, Liverpool (GK) in soccer Introduction INDIVIDUAL KICKING TECHNIQUES ASSOCIATED WITH IMPROVED KICKING DISTANCE IN ELITE YOUTH SOCCER GOAL KEEPERS Catching
ICCE Global Coach Conference 2017 31th July 2017, Liverpool (GK) in soccer Introduction INDIVIDUAL KICKING TECHNIQUES ASSOCIATED WITH IMPROVED KICKING DISTANCE IN ELITE YOUTH SOCCER GOAL KEEPERS Catching
Kinterra Instructions for Use Product Number: ROM-00-XXXXX-XX
 Kinterra Instructions for Use Product Number: ROM-00-XXXXX-XX Introduction Patient Selection Assembly Alignment The Kinterra foot/ankle system combines hydraulics and carbon fiber, to provide low to moderate
Kinterra Instructions for Use Product Number: ROM-00-XXXXX-XX Introduction Patient Selection Assembly Alignment The Kinterra foot/ankle system combines hydraulics and carbon fiber, to provide low to moderate
Gait. Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa
 Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Development of an end-effector to simulate the foot to ball interaction of an instep kick in soccer
 Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 284 289 9 th Conference of the International Sports Engineering Association (ISEA) Development of an end-effector to simulate the
Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 284 289 9 th Conference of the International Sports Engineering Association (ISEA) Development of an end-effector to simulate the
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2
 Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
+ t1 t2 moment-time curves
 Part 6 - Angular Kinematics / Angular Impulse 1. While jumping over a hurdle, an athlete s hip angle was measured to be 2.41 radians. Within 0.15 seconds, the hurdler s hip angle changed to be 3.29 radians.
Part 6 - Angular Kinematics / Angular Impulse 1. While jumping over a hurdle, an athlete s hip angle was measured to be 2.41 radians. Within 0.15 seconds, the hurdler s hip angle changed to be 3.29 radians.
A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking
 1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE. by Mehmet Temel
 GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE by Mehmet Temel A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the
GAIT RECOVERY IN HEALTHY SUBJECTS: PERTURBATIONS TO THE KNEE MOTION WITH A SMART KNEE BRACE by Mehmet Temel A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the
video Outline Pre-requisites of Typical Gait Case Studies Case 1 L5 Myelomeningocele Case 1 L5 Myelomeningocele
 Outline Evaluation of Orthosis Function in Children with Neuromuscular Disorders Using Motion Analysis Outcomes Terminology Methods Typically developing Case examples variety of pathologies Sylvia Õunpuu,
Outline Evaluation of Orthosis Function in Children with Neuromuscular Disorders Using Motion Analysis Outcomes Terminology Methods Typically developing Case examples variety of pathologies Sylvia Õunpuu,
Hydro. Tab Marine Engineering. Interceptor Trim Tabs. Born to live in the sea. 2017ver.1
 Hydro Tab Interceptor Trim Tabs Born to live in the sea 2017ver.1 Designed to operate... Developed under NMEA 2000 protocol Compatible with NMEA 018 Hydrotab is an innovative patented trim system designed
Hydro Tab Interceptor Trim Tabs Born to live in the sea 2017ver.1 Designed to operate... Developed under NMEA 2000 protocol Compatible with NMEA 018 Hydrotab is an innovative patented trim system designed
VALIDATION OF THE MINISUN IDEEA DATA RECORDER FOR THE ANALYSIS OF WALKING ON UNEVEN GROUND. Thesis. Submitted to. The School of Engineering of the
 VALIDATION OF THE MINISUN IDEEA DATA RECORDER FOR THE ANALYSIS OF WALKING ON UNEVEN GROUND Thesis Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements
VALIDATION OF THE MINISUN IDEEA DATA RECORDER FOR THE ANALYSIS OF WALKING ON UNEVEN GROUND Thesis Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements
HPW Biomechanics
 HPW Biomechanics hpw@mail.com www.hpwbiomechanics.com ~ via e-mail ~ January 31, 213 To: Attn: From: Subject: I-Roc Debbie Chapman Janet S. Dufek, Ph.D. Research Scientist Additional Footwear Evaluation
HPW Biomechanics hpw@mail.com www.hpwbiomechanics.com ~ via e-mail ~ January 31, 213 To: Attn: From: Subject: I-Roc Debbie Chapman Janet S. Dufek, Ph.D. Research Scientist Additional Footwear Evaluation