Autonomous Marine Robots Assisting Divers
|
|
|
- Ethan Erik Arnold
- 5 years ago
- Views:
Transcription










1 LUST Overview UNIVERSITY OF ZAGREB Faculty of Electrical Engineering and Computing Department of Control & Computer Engineering Laboratory for Underwater Systems and technologies Autonomous Marine Robots Assisting Divers Zoran Vukić & Nikola Mišković Oceans-Challanges & Opportunities 14th 17th May 2013 Porto, Portugal
2 BREAKING THE SURFACE ( FP7 CURE (2009, 2010, 2011); ONRG (2012, 2013, 2014) A week long field training with four main disciplines underwater robotics, marine biology/ecology, underwater archaeology, maritime security Plenary lectures by leading experts in the field Tutorials for students and participants/experts Missions at sea on place of interest Echange of new ideas, new proposals, new cooperation, new developments. Social program galla dinner, trip Industrial participation: VideoRay (USA) OceanServer (USA) OceanScan (Portugal) Other disciplines are welcome: oceanography, geology, hydrography,.. ECTS points 2



3 Our mission sites Nature park Telaščica & National Park Kornati Croatia is one of the richiest country with endemic species Telaščica is the nature park with 13 islands, 25 bays and 69 km of well indented coastline and one lake with the sea water. National park Kornati has 89 islands of 152 islands in the close proximity
4 Outline 1. Autonomous robotics in MCM Motivation remove humans from the mine field 2. Autonomous robotics helping divers - CADDY 4. Conclusions 4

5 5





6 Unexploded ordnance (UXO) in the Adriatic Sea NC gun fuses Gun shells Torpedos Bombs

7 The method of cutting with explosive 7


8 German mine from the WWII. Type: Bottom laying mine LMB III. Filled with 750 kg TNT mixed with aliminum powder. 8

9 Cooperation with NATO Undersea Research Centre Autonomous Naval MCM Neutralization System Perform maritime mine neutralization more efficiently and cost-effectively using a system of cooperative autonomous vehicles The master/slave type of collaboration between the highly capable ASV or AUV and a low-cost, hence less capable, mine intervention vehicle

10 Vehicles 10
11 MCM mission scenario ASV AUV Multibeam sonar 11


12 MCM mission scenario Range Bearing Depth 12

13 MCM mission scenario 13
14 MCM mission scenario 14
15 MCM mission scenario 15

16 MCM mission scenario 16
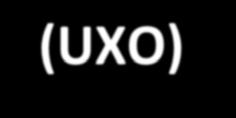
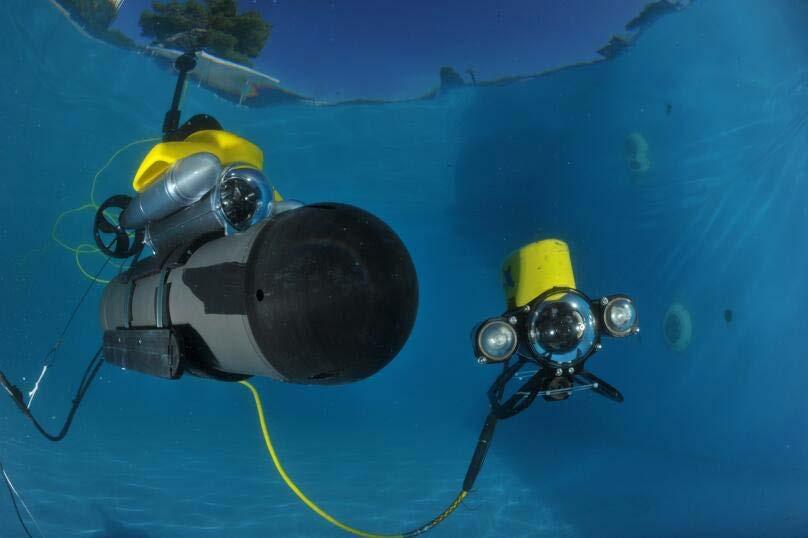
17 Cognitive autonomous diving buddy (CADDY) FP7 project in negotiation phase CADDY aims to establish an innovative set-up between a diver and companion autonomous marine robots (underwater and surface) that exhibit cognitive behaviour through learning, interpreting, and adapting to the diver s behaviour, physical state, and actions. Robotic system: Monitor the diver Understand the diver Cooperate with the diver 17




18 Idea Unlimited area of diver operation by autonomous positioning of the platform Absolute navigation underwater Maintaining a vertical acoustic channel reliable UW comms 18







19 Technical description Acoustic modem GPS WiFi CPU compass 4 thrusters 19

![Height [m] 0.](/docs-images/95/124375806/images/20-12.jpg "35 Width [m] 0.")
![707 Length [m]](/docs-images/95/124375806/images/20-13.jpg "0.707 Mass")
20 Technical description Height [m] 0.35 Width [m] Length [m] Mass [kg] 25 20


21 Technical description 21


22 Add the AUV to monitor, cooperate and understand what the diver needs Can underwater robots replace diving buddies? 22


23 Gesture enabled communication How can natural diver-robot communication be accomplished? - what sensors to use for perceiving hand gestures, - how to construct a complex language for issuing mission commands to robots with a limited number of symbols used by divers, - how to provide feedback to the diver from the cognitive underwater robot 23

24 Cooperation How can underwater robots cooperate and interact with divers? Diver guide leads the diver through the underwater environment adapts to the diver motion Challenge: cooperative guidance algorithms where masterslave roles switch stochastically Diver slave performs tasks: mosaicing, illuminating, or bringing a specific tool Challenge: Online mission replanners Low level control tasks 24

25 Interpreting diver behaviour How can we interpret diver behaviour? Diver observer Challenge: 3D diver pose reconstruction using invasive and non-invasive sensors underwater, defining diver anthropological and physiological cues and determining sensors to measure them, and performing emotional analysis, i.e. correlating measurements to a set of diver behaviours. 25
26 CADDY consortium 1. UNIZG-FER, Zagreb, Croatia. N. Mišković 2. CNR-ISSIA, Genova, Italy. M. Caccia & M. Bibuli 3. IST-ISR, Lisbon, Portugal. A. Pascoal 4. JACOBS, Bremen, Germany. A. Birk 5. UNIVIE, Austria. K. Grammer 6. DAN Europe, Malta, C. Balestra 7. University of Newcastle (UNEW), UK. J. Neasham 26
27 Conclusion 1. Will underwater robots replace diving buddies? 2. How can natural diver-robot communication be accomplished? 3. How can underwater robots cooperate and interact with divers? 4. How can we interpret diver behaviour? 27
PROJECT PERIODIC REPORT
 PROJECT PERIODIC REPORT Grant Agreement number: 611373 Project acronym: CADDY Project title: Cognitive Autonomous Diving Buddy Funding Scheme: Collaborative project, Small or medium-scale focused research
PROJECT PERIODIC REPORT Grant Agreement number: 611373 Project acronym: CADDY Project title: Cognitive Autonomous Diving Buddy Funding Scheme: Collaborative project, Small or medium-scale focused research
Cooperative Control and Navigation in the Scope of the EC CADDY Project
 Cooperative Control and Navigation in the Scope of the EC CADDY Project Pedro Abreu, Mohammadreza Bayat, João Botelho, Pedro Góis, António Pascoal, Jorge Ribeiro, Miguel Ribeiro, Manuel Rufino, Luís Sebastião,
Cooperative Control and Navigation in the Scope of the EC CADDY Project Pedro Abreu, Mohammadreza Bayat, João Botelho, Pedro Góis, António Pascoal, Jorge Ribeiro, Miguel Ribeiro, Manuel Rufino, Luís Sebastião,
Monday, 1. October 2012
 Monday, 1. October 2012 8:30 9:15 OPENING SESSION Matko Barisic, University of Zagreb, Croatia Nikola Miskovic, University of Zagreb, Croatia 9:15 10:45 Equipment Presentation Session Antonio Vasilijevic,
Monday, 1. October 2012 8:30 9:15 OPENING SESSION Matko Barisic, University of Zagreb, Croatia Nikola Miskovic, University of Zagreb, Croatia 9:15 10:45 Equipment Presentation Session Antonio Vasilijevic,
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Dynamic positioning of a diver tracking surface platform
 Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Dynamic positioning of a diver tracking surface platform Nikola Mišković, Dula
Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Dynamic positioning of a diver tracking surface platform Nikola Mišković, Dula
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa
 Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
AN UNDERWATER AUGMENTED REALITY SYSTEM FOR COMMERCIAL DIVING OPERATIONS
 SYSTEM FOR COMMERCIAL DIVING OPERATIONS ROGELIO!MORALES-GARCÍA, PETER!KEITLER,!PATRICK!MAIER, GUDRUN!KLINKER! FACHGEBIET AUGMENTED (FAR) OCEANS '09 MTS/IEEE BILOXI "MARINE TECHNOLOGY FOR OUR FUTURE: GLOBAL
SYSTEM FOR COMMERCIAL DIVING OPERATIONS ROGELIO!MORALES-GARCÍA, PETER!KEITLER,!PATRICK!MAIER, GUDRUN!KLINKER! FACHGEBIET AUGMENTED (FAR) OCEANS '09 MTS/IEEE BILOXI "MARINE TECHNOLOGY FOR OUR FUTURE: GLOBAL
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Cooperative Autonomous Robotics at Sea
 Cooperative Robotics at Sea Andreas J. Häusler Laboratory of Robotics and Systems in Science and Engineering Instituto Superior Técnico Lisbon, Portugal MARUM, September 9, 2014 Introduction Cheira bem,
Cooperative Robotics at Sea Andreas J. Häusler Laboratory of Robotics and Systems in Science and Engineering Instituto Superior Técnico Lisbon, Portugal MARUM, September 9, 2014 Introduction Cheira bem,
Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001
 Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001 Anthony J. Healey David B. Marco Center for Autonomous Underwater Vehicle Research Naval Postgraduate School Monterey, CA phone: (831)-656-3462
Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001 Anthony J. Healey David B. Marco Center for Autonomous Underwater Vehicle Research Naval Postgraduate School Monterey, CA phone: (831)-656-3462
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
R3M: The 2.0 Ocean Observation Strategy for the Macaronesian region
 R3M: The 2.0 Ocean Observation Strategy for the Macaronesian region OUTLINE Where? Who? What? Why? What else? Where? Where? Where? European Station for Time-series in the OCean (ESTOC). Since 1992 60 Nm
R3M: The 2.0 Ocean Observation Strategy for the Macaronesian region OUTLINE Where? Who? What? Why? What else? Where? Where? Where? European Station for Time-series in the OCean (ESTOC). Since 1992 60 Nm
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
SAUC-E Mission & Rules 1 (Version 01 November 2013)
") SAUC-E Mission & Rules 1 (Version 01 November 2013) Competition date: September 20- September 26 2014 Competition venue: Centre for Maritime Research and Experimentation (CMRE), Viale San Bartolomeo 400
SAUC-E Mission & Rules 1 (Version 01 November 2013) Competition date: September 20- September 26 2014 Competition venue: Centre for Maritime Research and Experimentation (CMRE), Viale San Bartolomeo 400
SAUC-E 2016 Mission & Rules 1 (Version May 2016)
") SAUC-E 2016 Mission & Rules 1 (Version 1.2 3 May 2016) Competition date: July 3- July 8 2016 Competition venue: Centre for Maritime Research and Experimentation (CMRE), Viale San Bartolomeo 400 19126,
SAUC-E 2016 Mission & Rules 1 (Version 1.2 3 May 2016) Competition date: July 3- July 8 2016 Competition venue: Centre for Maritime Research and Experimentation (CMRE), Viale San Bartolomeo 400 19126,
UXO Below: Mitigating Marine UXO Risk
 RPS Energy Ltd Explosives Engineering Services UXO Below: Mitigating Marine UXO Risk Presented by Victoria Phillips 1 Aim To deliver an overview of Unexploded Ordnance (UXO) in the marine environment,
RPS Energy Ltd Explosives Engineering Services UXO Below: Mitigating Marine UXO Risk Presented by Victoria Phillips 1 Aim To deliver an overview of Unexploded Ordnance (UXO) in the marine environment,
CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE
 PRESENTATION HYDRO 17 15/11/2017 CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE Jana De Cuyper - MSc Geology Conor Davidge - BSc Ocean Exploration
PRESENTATION HYDRO 17 15/11/2017 CHALLENGES IN UXO-DETECTION: COMBINING DIFFERENT GEOPHYSICAL TECHNIQUES WITHIN UXO INVESTIGATION & CLEARANCE Jana De Cuyper - MSc Geology Conor Davidge - BSc Ocean Exploration
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL
 ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
Nemo Link s puxo campaign
 BLOCK 3 BLOCK 2 U e c n France 400000 570000 KP 0 KP 10 KP 20 KP 30 a r F 565000 BLOCK 1 450000 Belgique 0 5 ONGOING 10 15 20 km N 565000 t i n g n i K Nearshore BE Fra m o d ed KP 50 KP 60 KP 70 KP 80
BLOCK 3 BLOCK 2 U e c n France 400000 570000 KP 0 KP 10 KP 20 KP 30 a r F 565000 BLOCK 1 450000 Belgique 0 5 ONGOING 10 15 20 km N 565000 t i n g n i K Nearshore BE Fra m o d ed KP 50 KP 60 KP 70 KP 80
Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists
 Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists What is VENTURER? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate
Trial 3: Interactions Between Autonomous Vehicles and Pedestrians and Cyclists What is VENTURER? VENTURER is a 5m research and development project funded by government and industry and delivered by Innovate
RDT&E BUDGET ITEM JUSTIFICATION SHEET (R-2 Exhibit) JUNE 2001 APPROPRIATION/BUDGET ACTIVITY RDT&E, Defense Wide/BA 3
 JUNE 2001 APPROPRIATION/BUDGET ACTIVITY RDT&E, Defense Wide/BA 3") COST (In Millions) FY2000 FY2001 FY2002 Total Program Element (PE) Cost Explosive Ordnance Disposal/Low Intensity Conflict/P206 Special Operations/Low Intensity Conflict (SO/LIC)/P205 Alternatives to Antipersonnel
COST (In Millions) FY2000 FY2001 FY2002 Total Program Element (PE) Cost Explosive Ordnance Disposal/Low Intensity Conflict/P206 Special Operations/Low Intensity Conflict (SO/LIC)/P205 Alternatives to Antipersonnel
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities
 Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
A Distributed Control System using CAN bus for an AUV
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results
 Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results J. Vaganay, M. Elkins, D. Esposito, W. O Halloran (1) F. Hover, M. Kokko (2) Bluefin Robotics Corporation (1) Massachusetts Institute
Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results J. Vaganay, M. Elkins, D. Esposito, W. O Halloran (1) F. Hover, M. Kokko (2) Bluefin Robotics Corporation (1) Massachusetts Institute
NavyFIELD. - Submarine Manual -
 NavyFIELD - Submarine Manual - Index 1. How to get Submarine... P 2 2. Armaments of Submarine I. Weapon. P 3 II. Engine (Power Plant).... P 4 III. FCS (Fire Control System) P 4 IV. Torpedo and other Armaments..
NavyFIELD - Submarine Manual - Index 1. How to get Submarine... P 2 2. Armaments of Submarine I. Weapon. P 3 II. Engine (Power Plant).... P 4 III. FCS (Fire Control System) P 4 IV. Torpedo and other Armaments..
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
Ocean Observing Systems Summer Teacher Institute August 10 August 14, 2009
 OOS? What s that?? COSEE-West 2008 Ocean Observing Systems Summer Teacher Institute Resources/Lesson Plans http://www.usc.edu/org/cosee-west/resources.html#aug08 Teacher created lesson plans from 2008
OOS? What s that?? COSEE-West 2008 Ocean Observing Systems Summer Teacher Institute Resources/Lesson Plans http://www.usc.edu/org/cosee-west/resources.html#aug08 Teacher created lesson plans from 2008
Review and Classification of The Modern ROV
 Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Review and Classification of The Modern ROV Overview Chengxi Wu The National University of Shipbuilding named after Admiral Makarov With unmanned ground chariot, unmanned aircraft and unmanned ships gradually
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Testing and Evaluation of REMUS Vehicle Systems
 Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface in Waves
 Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface
Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface
Background Paper: Surveys. Nord Stream 2 AG Sep-17
 Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles
 Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS?
 www.cns-international.com CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS? EMRA 14 Workshop CNR, Rome June, 09 th 10 th 2014 CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY
www.cns-international.com CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY ROOM FOR ROBOTICS? EMRA 14 Workshop CNR, Rome June, 09 th 10 th 2014 CURRENT TRENDS IN PROFESSIONAL DIVING EQUIPMENT: ANY
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
ALFA Task 2 Deliverable M2.2.1: Underwater Vehicle Station Keeping Results
 ALFA Task Deliverable M..: Underwater Vehicle Station Keeping Results Geoffrey Hollinger Oregon State University Phone: 5-737-59 geoff.hollinger@oregonstate.edu September, Introduction This document presents
ALFA Task Deliverable M..: Underwater Vehicle Station Keeping Results Geoffrey Hollinger Oregon State University Phone: 5-737-59 geoff.hollinger@oregonstate.edu September, Introduction This document presents
eurathlon 2014 Missions & Rules 1 (Version 02 September 2014)
") eurathlon 2014 Missions & Rules 1 (Version 02 September 2014) Competition date: September 29- October 3, 2014 Competition venue: Centre for Maritime Research and Experimentation (CMRE), Viale San Bartolomeo
eurathlon 2014 Missions & Rules 1 (Version 02 September 2014) Competition date: September 29- October 3, 2014 Competition venue: Centre for Maritime Research and Experimentation (CMRE), Viale San Bartolomeo
CS 341 Computer Architecture and Organization. Lecturer: Bob Wilson Cell Phone: or
 CS 341 Computer Architecture and Organization Lecturer: Bob Wilson Cell Phone: 508-577-9895 Email: robert.wilson@umb.edu or bobw@cs.umb.edu 1 Welcome to CS341 This course teaches computer architecture
CS 341 Computer Architecture and Organization Lecturer: Bob Wilson Cell Phone: 508-577-9895 Email: robert.wilson@umb.edu or bobw@cs.umb.edu 1 Welcome to CS341 This course teaches computer architecture
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
UNEXPLODED ORDNANCE (SEPARATING FACT FROM FICTION)
") UNEXPLODED ORDNANCE (SEPARATING FACT FROM FICTION) Mike Sainsbury, Managing Director 21 June 2017 1 ZETICA WHO ARE WE? Who are Zetica Mapping hazards UXO Risk assessment/desk studies Detection Investigation
UNEXPLODED ORDNANCE (SEPARATING FACT FROM FICTION) Mike Sainsbury, Managing Director 21 June 2017 1 ZETICA WHO ARE WE? Who are Zetica Mapping hazards UXO Risk assessment/desk studies Detection Investigation
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
SEAHORSES and SUBMARINES Testing transformational capabilities with modern UUVs at NAVOCEANO by Craig A. Peterson and Martha E. M.
 SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
AUSTRALIA S FUTURE SEA MINE COUNTERMEASURES
 APDR June 2018» FEATURES» AUSTRALIA S FUTURE SEA MINE COUNTERMEASURES AUSTRALIA S FUTURE SEA MINE COUNTERMEASURES GEOFF SLOCOMBE // VICTORIA Sea mines are a very cost-effective weapon for asymmetric warfare
APDR June 2018» FEATURES» AUSTRALIA S FUTURE SEA MINE COUNTERMEASURES AUSTRALIA S FUTURE SEA MINE COUNTERMEASURES GEOFF SLOCOMBE // VICTORIA Sea mines are a very cost-effective weapon for asymmetric warfare
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads
 Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads Carrick Detweiler, Stefan Sosnowski, Iuliu Vasilescu, and Daniela Rus Computer Science and Artificial Intelligence
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads Carrick Detweiler, Stefan Sosnowski, Iuliu Vasilescu, and Daniela Rus Computer Science and Artificial Intelligence
Oceanographic Research With The LiquID Station
 Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
History/Explorers/Expeditions/Technology Webquest!
 Name Block History/Explorers/Expeditions/Technology Webquest! http://www.divediscover.whoi.edu/history-ocean/21st.html Click on: History of Oceanography (on the left side of the page) 1. Oceanography may
Name Block History/Explorers/Expeditions/Technology Webquest! http://www.divediscover.whoi.edu/history-ocean/21st.html Click on: History of Oceanography (on the left side of the page) 1. Oceanography may
Fault Diagnosis based on Particle Filter - with applications to marine crafts
 1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
Country fact sheet South Korea
 ESRA results Country fact sheet South Korea The ESRA project is a joint initiative of research institutes in 25 countries aiming at collecting comparable national data on road users opinions, attitudes
ESRA results Country fact sheet South Korea The ESRA project is a joint initiative of research institutes in 25 countries aiming at collecting comparable national data on road users opinions, attitudes
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
Overview: Underwater sensing
 Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
Overview: Underwater sensing Vasilescu, I., Kotay, K., Rus, D., Dunbabin, M., and Corke, P. Data collection, storage, and retrieval with an underwater sensor network. In SenSys '05 Experimental results
Hydrodynamic analysis of submersible robot
 International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 1; Issue 9; September 2016; Page No. 20-24 Hydrodynamic analysis of submersible
International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 1; Issue 9; September 2016; Page No. 20-24 Hydrodynamic analysis of submersible
Manufacturers of Quality Diving Equipment
 Manufacturers of Quality Diving Equipment STEALTH Closed Circuit Mixed Gas Underwater Breathing Apparatus State of the art military electronic underwater life support system 120msw using Heliox or Trimix
Manufacturers of Quality Diving Equipment STEALTH Closed Circuit Mixed Gas Underwater Breathing Apparatus State of the art military electronic underwater life support system 120msw using Heliox or Trimix
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks
 In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
Sensors and Platforms for Autonomous Undersea Systems
 Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Copicut Reservoir Sidescan Sonar. Fall River, MA May 7, 2013
 Copicut Reservoir Sidescan Sonar Fall River, MA May 7, 2013 1 Table of Contents Section 1: Mission Overview... 3 Background... 3 Vehicle General Information... 3 Vehicle Mission Details... 4 Area of Operation...
Copicut Reservoir Sidescan Sonar Fall River, MA May 7, 2013 1 Table of Contents Section 1: Mission Overview... 3 Background... 3 Vehicle General Information... 3 Vehicle Mission Details... 4 Area of Operation...
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
ATON System Workshop
 ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
Robo-Nemo. Educating youth about ocean research! sponsored by the. National Science Foundation
 Robo-Nemo Educating youth about ocean research! sponsored by the National Science Foundation created by Monique Chyba and Ryan N. Smith University of Hawaii at Manoa Department of Mathematics in conjunction
Robo-Nemo Educating youth about ocean research! sponsored by the National Science Foundation created by Monique Chyba and Ryan N. Smith University of Hawaii at Manoa Department of Mathematics in conjunction
The MARES AUV, a Modular Autonomous Robot for Environment Sampling
 The MARES AUV, a Modular Autonomous Robot for Environment Sampling Nuno A. Cruz and Aníbal C. Matos Faculdade de Engenharia da Universidade do Porto Rua Dr. Roberto Frias, 4200-465, Porto, Portugal Email:
The MARES AUV, a Modular Autonomous Robot for Environment Sampling Nuno A. Cruz and Aníbal C. Matos Faculdade de Engenharia da Universidade do Porto Rua Dr. Roberto Frias, 4200-465, Porto, Portugal Email:
AUVs for oceanographic science at IFREMER, project progress and operational feedback
 AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
Wave-Phase-Resolved Air-Sea Interaction
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
Collaborative Autonomous Vehicles
 Bao Nguyen and Alex Bourque Defence R&D Canada Centre for Operational Research and Analysis 3701 Carling Avenue, Ottawa, Ontario, Canada K1A 0Z4 Nguyen.bao2@forces.gc.ca/Bourque.alex2@forces.gc.ca ABSTRACT
Bao Nguyen and Alex Bourque Defence R&D Canada Centre for Operational Research and Analysis 3701 Carling Avenue, Ottawa, Ontario, Canada K1A 0Z4 Nguyen.bao2@forces.gc.ca/Bourque.alex2@forces.gc.ca ABSTRACT
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
 1 CHAPTER 1 INTRODUCTION 1.1 Simulation of Motion of an Underwater Vehicle One of the safest ways to explore the underwater is using small unmanned vehicles to carry out various missions and measurements,
1 CHAPTER 1 INTRODUCTION 1.1 Simulation of Motion of an Underwater Vehicle One of the safest ways to explore the underwater is using small unmanned vehicles to carry out various missions and measurements,
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs
 Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Computer Simulation Programms in Mine Rescue Education and Training, on the Example of Student Mine Rescue Teams
 Computer Simulation Programms in Mine Rescue Education and Training, on the Example of Student Mine Rescue Teams Prof. Dr.-Ing. Helmut Mischo 1, Prof Dr.-Ing. Jürgen Brune 2 1 Technische Universität Bergakademie
Computer Simulation Programms in Mine Rescue Education and Training, on the Example of Student Mine Rescue Teams Prof. Dr.-Ing. Helmut Mischo 1, Prof Dr.-Ing. Jürgen Brune 2 1 Technische Universität Bergakademie
Tifft Water Supply Symposium
 Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
Tifft Water Supply Symposium SEPTEMBER 21-22, 2016 BUFFALO, NEW YORK Impossible Journey: Underwater Inspection of Large Diameter Water Transmission Tunnel Kristin Wheaton, PE Jim Clark Bob Clarke, P.Eng,
MISSION PLANNING AND DATA ACQUISITION SOFTWARE
 MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
UNDERWATER DRONES CONTROL TOWER UNDERWATER DRONES CONTROL TOWER
 UNDERWATER DRONES CONTROL TOWER UNDERWATER DRONES CONTROL TOWER Adnan Tahirovic - Kemal Delic ARCHITECTURE, DESIGN, ENGINEERING Talk outline - why and how uwr is important? Underwater World Explained Technology
UNDERWATER DRONES CONTROL TOWER UNDERWATER DRONES CONTROL TOWER Adnan Tahirovic - Kemal Delic ARCHITECTURE, DESIGN, ENGINEERING Talk outline - why and how uwr is important? Underwater World Explained Technology
"Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider"
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
SeaFox IQ/SeaWolf - new mini and midi AUVs for security and inspection
 SeaFox IQ/SeaWolf - new mini and midi AUVs for security and inspection WILLI HORNFELD ATLAS ELEKTRONIK GmbH Sebaldsbrücker Heerstraße 235 FRG-28309 Bremen Tel: xx49-421-4571952 Email: willi.hornfeld@atlas-elektronik.com
SeaFox IQ/SeaWolf - new mini and midi AUVs for security and inspection WILLI HORNFELD ATLAS ELEKTRONIK GmbH Sebaldsbrücker Heerstraße 235 FRG-28309 Bremen Tel: xx49-421-4571952 Email: willi.hornfeld@atlas-elektronik.com
Autonomous Underwater Vehicles Explorer Class
 Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement
 SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
Autonomous Environmental Profiling Moorings for Coastal Monitoring
 Autonomous Environmental Profiling Moorings for Coastal Monitoring Jeffrey W. Book Naval Research Laboratory, Stennis Space Center, MS Introduction There are many reasons to monitor coastal environments
Autonomous Environmental Profiling Moorings for Coastal Monitoring Jeffrey W. Book Naval Research Laboratory, Stennis Space Center, MS Introduction There are many reasons to monitor coastal environments
The World Robotic Sailing Championship, a competition to stimulate the development of autonomous sailboats
 The World Robotic Sailing Championship, a competition to stimulate the development of autonomous sailboats Fabrice Le Bars and Luc Jaulin STIC/OSM, Lab-STICC/CID/IHSEV ENSTA Bretagne Brest, France {fabrice.le_bars,
The World Robotic Sailing Championship, a competition to stimulate the development of autonomous sailboats Fabrice Le Bars and Luc Jaulin STIC/OSM, Lab-STICC/CID/IHSEV ENSTA Bretagne Brest, France {fabrice.le_bars,
George Mason University College of Education and Human Development Physical Activity for Lifetime Wellness
 George Mason University College of Education and Human Development Physical Activity for Lifetime Wellness RECR 161 (001): INTS 195 (001) - Basic Scuba Diving 2 Credits, Spring 2017 Wed 7:20-10:00 PM Aquatic
George Mason University College of Education and Human Development Physical Activity for Lifetime Wellness RECR 161 (001): INTS 195 (001) - Basic Scuba Diving 2 Credits, Spring 2017 Wed 7:20-10:00 PM Aquatic
The development of the modular Hard- and Software Architecture of the Autonomous Underwater Vehicle MONSUN
 The development of the modular Hard- and Software Architecture of the Autonomous Underwater Vehicle MONSUN Benjamin Meyer, Kristian Ehlers, Cedric Isokeit and Erik Maehle University of Lübeck, Institute
The development of the modular Hard- and Software Architecture of the Autonomous Underwater Vehicle MONSUN Benjamin Meyer, Kristian Ehlers, Cedric Isokeit and Erik Maehle University of Lübeck, Institute
Ser 01/ Mar 94. Waehington, DC are forwarded. Subj:
 USS DEFENDER (MCM-2) FPO AA 34090-1 922 5750 Ser 01/ 62 23 Mar 94 From: Commanding Officer, USS DEFENDER (Ma 2) To: Director of Naval Bistory (NOgBB), Washington Navy Yard, Waehington, DC 20374-0571 Subj:
USS DEFENDER (MCM-2) FPO AA 34090-1 922 5750 Ser 01/ 62 23 Mar 94 From: Commanding Officer, USS DEFENDER (Ma 2) To: Director of Naval Bistory (NOgBB), Washington Navy Yard, Waehington, DC 20374-0571 Subj:
Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem.
 Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem. S. Afzulpurkar, P. Maurya, G. Navelkar, E. Desa, A. Mascarenhas, N. Dabholkar, R. Madhan 1, S.
Acoustic communication for Maya Autonomous Underwater Vehicle - performance evaluation of acoustic modem. S. Afzulpurkar, P. Maurya, G. Navelkar, E. Desa, A. Mascarenhas, N. Dabholkar, R. Madhan 1, S.
Information Alkmaar Class Mine Hunters
 Information Alkmaar Class Mine Hunters 1. General information All four available ships have been built by: Van der Giessen-de Noord, Alblasserdam, The Netherlands. Haarlem commissioned 12 Jan 1984 decommissioned
Information Alkmaar Class Mine Hunters 1. General information All four available ships have been built by: Van der Giessen-de Noord, Alblasserdam, The Netherlands. Haarlem commissioned 12 Jan 1984 decommissioned
SUPER YACHT SUB SERIES
 SUPER YACHT SUB SERIES THE ULTIMATE LUXURY SUBMERSIBLE 3 OCCUPANTS 100M 500M The Ultimate in Superyacht Luxury Compact and luxurious private submarines especially designed to fit aboard superyachts, the
SUPER YACHT SUB SERIES THE ULTIMATE LUXURY SUBMERSIBLE 3 OCCUPANTS 100M 500M The Ultimate in Superyacht Luxury Compact and luxurious private submarines especially designed to fit aboard superyachts, the
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Failure Detection in an Autonomous Underwater Vehicle
 Failure Detection in an Autonomous Underwater Vehicle Alec Orrick, Make McDermott, Department of Mechanical Engineering David M. Barnett, Eric L. Nelson, Glen N. Williams, Department of Computer Science
Failure Detection in an Autonomous Underwater Vehicle Alec Orrick, Make McDermott, Department of Mechanical Engineering David M. Barnett, Eric L. Nelson, Glen N. Williams, Department of Computer Science
Doug Chapman SUMMARY PROFILE
 Doug Chapman Orlando, Florida Citizenship: USA Email: chapman@marinetechresources.com SUMMARY PROFILE Technical leader, engineer and scientist with over forty years experience with the US Department of
Doug Chapman Orlando, Florida Citizenship: USA Email: chapman@marinetechresources.com SUMMARY PROFILE Technical leader, engineer and scientist with over forty years experience with the US Department of
Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic
 Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic R. Tonnessen* (Petroleum Geo-Services) & T. Skadberg (Petroleum Geo- Services) SUMMARY
Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic R. Tonnessen* (Petroleum Geo-Services) & T. Skadberg (Petroleum Geo- Services) SUMMARY
Magnetic Sensors Project
 Magnetic Sensors Project Dr. Ted R. Clem Code R22, Coastal Systems Station (CSS), Dahlgren Division, Naval Surface Warfare Center, Panama City, FL 32407-7001 Phone: (850) 234-4670 Fax: (850) 235-5462 Email:
Magnetic Sensors Project Dr. Ted R. Clem Code R22, Coastal Systems Station (CSS), Dahlgren Division, Naval Surface Warfare Center, Panama City, FL 32407-7001 Phone: (850) 234-4670 Fax: (850) 235-5462 Email:
~ A Behavioral Response Study in 2007 &2008 (BRS 07/08) was conducted in the Bahamas to
 was conducted in the Bahamas to") Biological and Behavioral Response Studies in the Bahamas in 27 28 (BRS 7/8) ~ Project Summary ~ ~ A Behavioral Response Study in 27 &28 (BRS 7/8) was conducted in the Bahamas to study diving behavior
Biological and Behavioral Response Studies in the Bahamas in 27 28 (BRS 7/8) ~ Project Summary ~ ~ A Behavioral Response Study in 27 &28 (BRS 7/8) was conducted in the Bahamas to study diving behavior