Robocup 2010 Version 1 Storyboard Prototype 13 th October 2009 Bernhard Hengst
|
|
|
- Basil Tyler
- 5 years ago
- Views:
Transcription

1 Robocup 2010 Version 1 Storyboard Prototype 13 th October 2009 Bernhard Hengst
2 Developmental Research Strategy! Fail-fast, fail cheap! We should accept poor performance but insist it is complete! Version 1 objective is to have a single Nao kick a ball into the goal! While we develop and test version 1, we store up ideas for version 2, 3, 4...


 State Es+ma+on Field- State +")

 Actua+on (head- movement,")
")
3 Game Controller Roles (Robot- behaviour, eg Goalie, Forward, Defender ) Skills (localise, posidon, find- ball, track- ball, get- behind- ball, kick- ball, getup) State Es+ma+on Field- State + Robot- State Sensing (cameras, IR, hall- effect, joint- angles, foot- sensors, IMU, bumpers, sonar, wireless) Actua+on (head- movement, leg/ arm- movement, camera- switching, speakers, LEDs, wireless) Environment (this robot, ball, other robots)
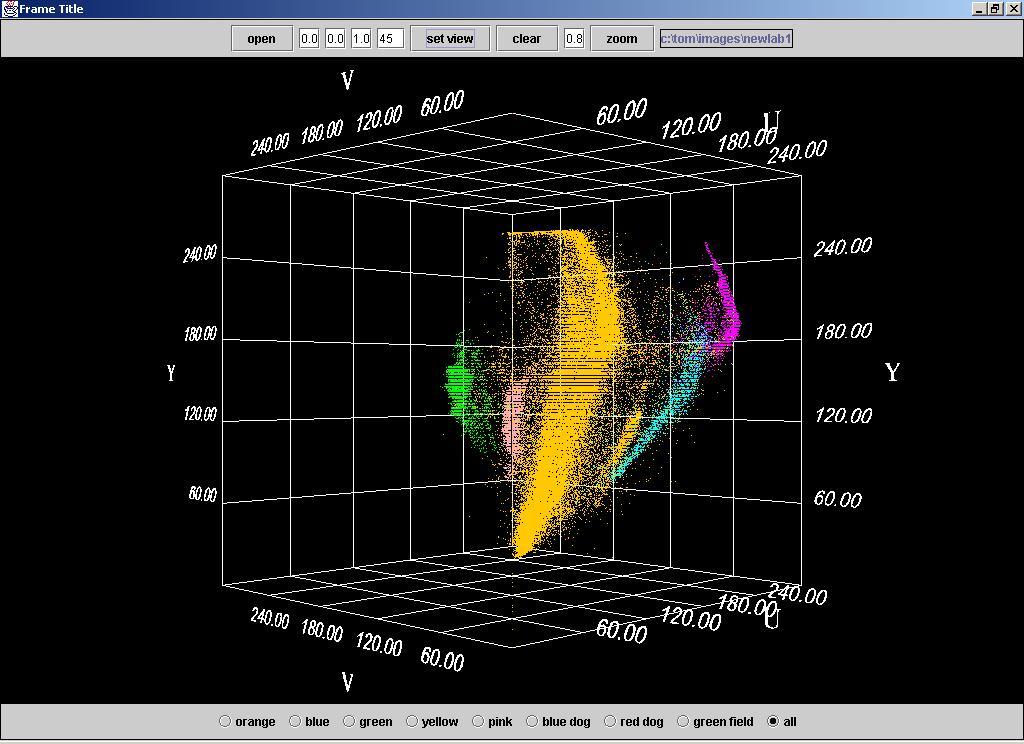
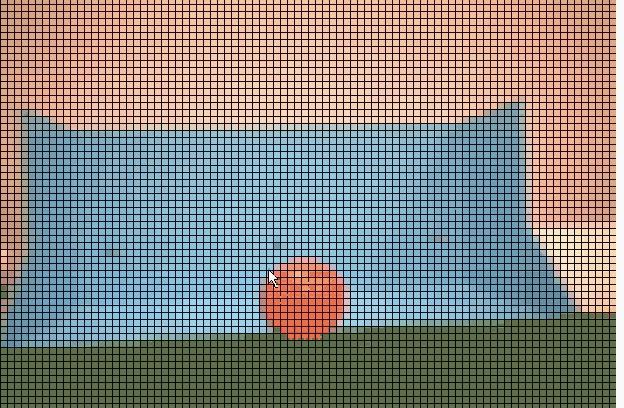
4 Colour Classification Off-Nao Demonstration
 pixel in the image, both vert. & horiz.")
5 Vision Saliency Preprocess! Subsample and classify 640 x 480 image down to 160 x 120 (80 x 60?)! By processing every 4 th (8 th?) pixel in the image, both vert. & horiz.! This gives us information about the field edge, ball and goal locations
6 Field-edge Location! Find green to non-green transition points! Find field-edge lines using RANSAC
7 ASIDE RANSAC! RANSAC is an abbreviation for "RANdom SAmple Consensus! It is an iterative method to estimate parameters of a mathematical model from a set of observed data which contains outliers.

8 Field-edge display Off-Nao
9 ASIDE Field-edge Position Observations! Project vision field-edge into plan view! Find likely positions of robot! One line determines rectangle! Two lines determine 4 points
10 Goal-post Identification


11 Position Estimate from Goal Posts Width distance two posts height or bottom of post one post
12 ASIDE Position Estimate from Field-lines Matching Points

13 ASIDE Position Estimate from Field-lines Matching Lines

14 Robot Localisation Field-edge Goal-posts Field-lines Ball? Furniture? Local pillars?
15 Bayesian Filter Considerations! Kalman filter and variations. Fast, but poor approximation to multi-modal distributions generated by SPL observations! Particle filters. Represent multi-modal distributions directly, but suffer from heavy computational load with many particles! Variables to model ie robot-position, ball-position, other robots (own team, opposition team)! Could use multiple-model KF (Uther and Quinlan/ Middleton), possibly with less variables eg 3 for robot + 2 (or 4) for ball, or start with PF and switch to KF! But, for version 1, start with simpler heuristic
16 Localisation Heurisitc (Version 1)! Find closest distance ( x, y, ) from current position to observation.! Update robot position towards observed position based on relative confidence between current and observed! Off-Nao Deonstration

17 Ball Position (1)! In 160 x 120 saliency image look for likely ball places and size (eg max orange pixel tally both horizontally and vertically)! Ignore any positions above field-edge line in image
18 Ball Position (2)! Extract 160 x 120 sub-image (fovea) from 640 x 480 image to fit ball [or locate and track ball boundary directly Carl s idea]! Find ball-edge pixels ie orange to non-orange transitions! Use median for observation measure of center and hence radius.! Ref Alex North report

19 Ball Position (3)! Ball distance from camera - radius d



20 Off-Nao Robot-position & Ball
21 Localise Skill! Localise first (before looking for ball)! Use robot position variance (confidence, uncertainty) as a threshold parameter! Look around for goals [later field-edges, field-lines, ball, natural landmarks]! Off-Nao Deonstration
22 Find-Ball Skill! Like a survivor search mission at sea! Need to determine a good search heuristics! Criteria - use any prior knowledge (ball location probability is not uniform)! Location on the field (can see more of the field in certain locations)! Search below field-edge! Minimise walking/head movements! Last known position of ball and which direction it was rolling! Minimise inadvertent ball pushing in wrong direction! Don t forget ball may be occluded! Hints from other robots... etc, etc.! Start with simple heuristic for Verison 1! Off-Nao Demonstration
23 Ball Tracking Skill! Software saccade to keep fovea on ball in 640 x 480 image, with ball centered in fovea! Move head smoothly (and switch cameras) to keep fovea in center of image! Off-Nao Demonstration
24 Walk-behind Ball Skill! Use Aldebran walk (V1) need to control movements! forward backward! left-right! turn CW and CCW! Walk to ball skill ie correct reactively! Plan shortest path to line up ball and target-goal Demonstration
25 Kick-Ball Skill! Walk into ball (V1)! Tap ball in direction of Goal! Sideways tap
26 Kick Goal Behaviour (V1)! Repeat until goal scored! if ( robot-position uncertain) Localise! else if ( relative ball-position uncertain) Find-Ball! else if (ball not lined-up) Track-Ball & Walk-behind Ball! else Kick-Ball! Note: Vision, Robot/Ball positioning and movement tasks are running in separate higher frequency threads
A new AI benchmark. Soccer without Reason Computer Vision and Control for Soccer Playing Robots. Dr. Raul Rojas
 Soccer without Reason Computer Vision and Control for Soccer Playing Robots Dr. Raul Rojas A new AI benchmark -computer vision in real time - embodied intelligence: mechanics - energy management - local
Soccer without Reason Computer Vision and Control for Soccer Playing Robots Dr. Raul Rojas A new AI benchmark -computer vision in real time - embodied intelligence: mechanics - energy management - local
Sony Four Legged Robot Football League Rule Book
 Sony Four Legged Robot Football League Rule Book RoboCup Technical Committee (As of June 9, 2003) 1 Rules are classified into several categories 1. Setup of the environment 2. Robot players 3. Game process
Sony Four Legged Robot Football League Rule Book RoboCup Technical Committee (As of June 9, 2003) 1 Rules are classified into several categories 1. Setup of the environment 2. Robot players 3. Game process
Standard League WRO Football Simple Simon EV3 Training Curriculum
 Standard League WRO Football Simple Simon EV3 Training Curriculum Brian Thomas **LEGO, EV3 Mindstorms and Robolab are Registered Trademarks of the LEGO Corporation RoboCup Junior Australia Inc Copyright
Standard League WRO Football Simple Simon EV3 Training Curriculum Brian Thomas **LEGO, EV3 Mindstorms and Robolab are Registered Trademarks of the LEGO Corporation RoboCup Junior Australia Inc Copyright
GEN II Robot Soccer EV3 Compass Training Curriculum Brian Thomas
 GEN II Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2015 1 GEN II EV3 Robot Soccer Training Overview Welcome! The aim of this curriculum is to guide
GEN II Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2015 1 GEN II EV3 Robot Soccer Training Overview Welcome! The aim of this curriculum is to guide
RoboCup SPL 2015 Champion Team Paper
 RoboCup SPL 2015 Champion Team Paper Brad Hall, Sean Harris, Bernhard Hengst, Roger Liu, Kenneth Ng, Maurice Pagnucco, Luke Pearson, Claude Sammut, and Peter Schmidt School of Computer Science and Engineering
RoboCup SPL 2015 Champion Team Paper Brad Hall, Sean Harris, Bernhard Hengst, Roger Liu, Kenneth Ng, Maurice Pagnucco, Luke Pearson, Claude Sammut, and Peter Schmidt School of Computer Science and Engineering
University of Amsterdam. Faculty of Science The Netherlands. Dutch Nao Team. Technical Report. October
 University of Amsterdam Faculty of Science The Netherlands Dutch Nao Team Technical Report Authors: Caitlin Lagrand Michiel van der Meer Jonathan Gerbscheid Thomas Groot Sébastien Negrijn Patrick de Kok
University of Amsterdam Faculty of Science The Netherlands Dutch Nao Team Technical Report Authors: Caitlin Lagrand Michiel van der Meer Jonathan Gerbscheid Thomas Groot Sébastien Negrijn Patrick de Kok
Line Following with RobotC Page 1
 Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
Line Following with RobotC Page 1 Line Following with By Michael David Lawton Introduction Line following is perhaps the best way available to VEX Robotics teams to quickly and reliably get to a certain
BURST Team Report RoboCup 2009 SPL
 BURST Team Report RoboCup 2009 SPL Eran Polosetski 1, Vladimir (Vova) Sadov 1, Alon Levy 1, Asaf Shilony 1, Anat Sevet 1, Elad Alon 1, Meytal Traub 1, Gal Kaminka 1, and Eli Kolberg 2 1 Computer Science
BURST Team Report RoboCup 2009 SPL Eran Polosetski 1, Vladimir (Vova) Sadov 1, Alon Levy 1, Asaf Shilony 1, Anat Sevet 1, Elad Alon 1, Meytal Traub 1, Gal Kaminka 1, and Eli Kolberg 2 1 Computer Science
Humanoid Omni-directional Locomotion. Thesis B Report
 Humanoid Omni-directional Locomotion Thesis B Report Brock White October 10, 2011 School of Computer Science & Engineering University of New South Wales Sydney 2052, Australia Supervisors and Assessors
Humanoid Omni-directional Locomotion Thesis B Report Brock White October 10, 2011 School of Computer Science & Engineering University of New South Wales Sydney 2052, Australia Supervisors and Assessors
Cyclists gaze behavior in urban space: an eye-tracking experiment on bicycle facilities.
 Scientific Seminar SIDT 2015 Torino 15.09.2015 Cyclists gaze behavior in urban space: an eye-tracking experiment on bicycle facilities. Alessandra Mantuano, Silvia Bernardi, Federico Rupi DICAM Department
Scientific Seminar SIDT 2015 Torino 15.09.2015 Cyclists gaze behavior in urban space: an eye-tracking experiment on bicycle facilities. Alessandra Mantuano, Silvia Bernardi, Federico Rupi DICAM Department
Season: Spring 2016 Age Group: U8 Week: 1
 Season: Spring 2016 Age Group: U8 Week: 1 Stage 4 Surfaces: (8 Minutes) Activity Description In a 15Wx20L grid. Each player has a ball. Have the players try to use the 4 surfaces of the foot in 1 fluid
Season: Spring 2016 Age Group: U8 Week: 1 Stage 4 Surfaces: (8 Minutes) Activity Description In a 15Wx20L grid. Each player has a ball. Have the players try to use the 4 surfaces of the foot in 1 fluid
SHOT ON GOAL. Name: Football scoring a goal and trigonometry Ian Edwards Luther College Teachers Teaching with Technology
 SHOT ON GOAL Name: Football scoring a goal and trigonometry 2006 Ian Edwards Luther College Teachers Teaching with Technology Shot on Goal Trigonometry page 2 THE TASKS You are an assistant coach with
SHOT ON GOAL Name: Football scoring a goal and trigonometry 2006 Ian Edwards Luther College Teachers Teaching with Technology Shot on Goal Trigonometry page 2 THE TASKS You are an assistant coach with
FIRA ROBOT SOCCER COMPETITION. Robot Soccer Competition Singapore Robotic Games 2012 INTRODUCTION
 INTRODUCTION ROBOT SOCCER COMPETITION The objective of the robot soccer is to build a team of robots to play 5-a-side football against an opponent robot team. Each robot soccer team shall setup a global
INTRODUCTION ROBOT SOCCER COMPETITION The objective of the robot soccer is to build a team of robots to play 5-a-side football against an opponent robot team. Each robot soccer team shall setup a global
Taking Your Class for a Walk, Randomly
 Taking Your Class for a Walk, Randomly Daniel Kaplan Macalester College Oct. 27, 2009 Overview of the Activity You are going to turn your students into an ensemble of random walkers. They will start at
Taking Your Class for a Walk, Randomly Daniel Kaplan Macalester College Oct. 27, 2009 Overview of the Activity You are going to turn your students into an ensemble of random walkers. They will start at
/435 Artificial Intelligence Fall 2015
 Final Exam 600.335/435 Artificial Intelligence Fall 2015 Name: Section (335/435): Instructions Please be sure to write both your name and section in the space above! Some questions will be exclusive to
Final Exam 600.335/435 Artificial Intelligence Fall 2015 Name: Section (335/435): Instructions Please be sure to write both your name and section in the space above! Some questions will be exclusive to
Pose Estimation for Robotic Soccer Players
 J. Hartfill Pose estimation 1 / 21 MIN Faculty Department of Informatics Pose Estimation for Robotic Soccer Players in the Context of RoboCup Judith Hartfill University of Hamburg Faculty of Mathematics,
J. Hartfill Pose estimation 1 / 21 MIN Faculty Department of Informatics Pose Estimation for Robotic Soccer Players in the Context of RoboCup Judith Hartfill University of Hamburg Faculty of Mathematics,
RoboCup Humanoid League 2003 Rules
 1 of 11 04.09.2007 08:07 RoboCup Humanoid League 2003 Rules Last Updated: June 25, 2003. first draft as of: June 12, 2003. The main body of this draft is from the www.robocup.org homepage last updated
1 of 11 04.09.2007 08:07 RoboCup Humanoid League 2003 Rules Last Updated: June 25, 2003. first draft as of: June 12, 2003. The main body of this draft is from the www.robocup.org homepage last updated
Dynamic Omnidirectional Kicks on Humanoid Robots
 THE UNIVERSITY OF NEW SOUTH WALES THE SCHOOL OF COMPUTER SCIENCE AND ENGINEERING Dynamic Omnidirectional Kicks on Humanoid Robots By: Belinda Teh tehbelinda@cse.unsw.edu.au A Thesis submitted for the degree
THE UNIVERSITY OF NEW SOUTH WALES THE SCHOOL OF COMPUTER SCIENCE AND ENGINEERING Dynamic Omnidirectional Kicks on Humanoid Robots By: Belinda Teh tehbelinda@cse.unsw.edu.au A Thesis submitted for the degree
Fault Diagnosis based on Particle Filter - with applications to marine crafts
 1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology 2 Faults Danger and harm Pollution
(10, 11 and Some 12 Year Olds)
") 2v2 +2 Activity Description Coaching Objective Coach sets up a 20x20 yard grid. Movement with and Two teams look to play the soccer ball to a target player on opposite sides of the grid. without the ball
2v2 +2 Activity Description Coaching Objective Coach sets up a 20x20 yard grid. Movement with and Two teams look to play the soccer ball to a target player on opposite sides of the grid. without the ball
Ball Modelling and its Applications in Robot Goalie Behaviours
 THE UNIVERSITY OF NEW SOUTH WALES THE SCHOOL OF COMPUTER SCIENCE AND ENGINEERING Ball Modelling and its Applications in Robot Goalie Behaviours By: Belinda Teh tehbelinda@cse.unsw.edu.au A Special Project
THE UNIVERSITY OF NEW SOUTH WALES THE SCHOOL OF COMPUTER SCIENCE AND ENGINEERING Ball Modelling and its Applications in Robot Goalie Behaviours By: Belinda Teh tehbelinda@cse.unsw.edu.au A Special Project
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
EFFORTLESS SWIMMING. Mastering Freestyle Technique: How to swim faster, longer and easier (and look good doing it)
") Mastering Freestyle Technique: How to swim faster, longer and easier (and look good doing it) Dear Fellow Swimmer, Thank you very much for investing your money, confidence and time into this course. We've
Mastering Freestyle Technique: How to swim faster, longer and easier (and look good doing it) Dear Fellow Swimmer, Thank you very much for investing your money, confidence and time into this course. We've
beestanbul RoboCup 3D Simulation League Team Description Paper 2012
 beestanbul RoboCup 3D Simulation League Team Description Paper 2012 Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek, and Sanem Sariel-Talay Artificial Intelligence
beestanbul RoboCup 3D Simulation League Team Description Paper 2012 Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek, and Sanem Sariel-Talay Artificial Intelligence
This is your guide to practical training sessions and warm up exercises for Match Officials in Ontario.
 This is your guide to practical training sessions and warm up exercises for Match Officials in Ontario. These sessions have been carefully selected for maximum impact. You may add degrees of difficulty
This is your guide to practical training sessions and warm up exercises for Match Officials in Ontario. These sessions have been carefully selected for maximum impact. You may add degrees of difficulty
Better Search Improved Uninformed Search CIS 32
 Better Search Improved Uninformed Search CIS 32 Functionally PROJECT 1: Lunar Lander Game - Demo + Concept - Open-Ended: No One Solution - Menu of Point Options - Get Started NOW!!! - Demo After Spring
Better Search Improved Uninformed Search CIS 32 Functionally PROJECT 1: Lunar Lander Game - Demo + Concept - Open-Ended: No One Solution - Menu of Point Options - Get Started NOW!!! - Demo After Spring
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas
 Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
Open Research Online The Open University s repository of research publications and other research outputs
 Open Research Online The Open University s repository of research publications and other research outputs Developing an intelligent table tennis umpiring system Conference or Workshop Item How to cite:
Open Research Online The Open University s repository of research publications and other research outputs Developing an intelligent table tennis umpiring system Conference or Workshop Item How to cite:
DAInamite. Team Description for RoboCup 2013
 DAInamite Team Description for RoboCup 2013 Axel Heßler, Yuan Xu, Erdene-Ochir Tuguldur and Martin Berger {axel.hessler, yuan.xu, tuguldur.erdene-ochir, martin.berger}@dai-labor.de http://www.dainamite.de
DAInamite Team Description for RoboCup 2013 Axel Heßler, Yuan Xu, Erdene-Ochir Tuguldur and Martin Berger {axel.hessler, yuan.xu, tuguldur.erdene-ochir, martin.berger}@dai-labor.de http://www.dainamite.de
Team Description: Building Teams Using Roles, Responsibilities, and Strategies
 Team Description: Building Teams Using Roles, Responsibilities, and Strategies Simon Ch'ng and Lin Padgham (schng cs. trait, edu. au) (linpa cs. rrait, edu. au) Department of Computer Science Royal Melbourne
Team Description: Building Teams Using Roles, Responsibilities, and Strategies Simon Ch'ng and Lin Padgham (schng cs. trait, edu. au) (linpa cs. rrait, edu. au) Department of Computer Science Royal Melbourne
Rules for. Polyathlon. Version Released
 Object of the game: What is a polyathlon? Rules for Polyathlon Version 151021 Released Polyathlon is a series of contests or events similar to the athletic decathlon where robots compete to determine the
Object of the game: What is a polyathlon? Rules for Polyathlon Version 151021 Released Polyathlon is a series of contests or events similar to the athletic decathlon where robots compete to determine the
Introduction to Waves. If you do not have access to equipment, the following experiments can be observed here:
 Introduction to Waves If you do not have access to equipment, the following experiments can be observed here: http://tinyurl.com/lupz3dh 1.1 There is a tray with water in it. This can model throwing a
Introduction to Waves If you do not have access to equipment, the following experiments can be observed here: http://tinyurl.com/lupz3dh 1.1 There is a tray with water in it. This can model throwing a
COMP219: Artificial Intelligence. Lecture 8: Combining Search Strategies and Speeding Up
 COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up 1 Overview Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search
COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up 1 Overview Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search
5. Explain what the website means when it says Waves transfer energy, not matter.
 Introduction When it comes to waves, there are so many ways that waves can be talked about. Whether we are talking about the anatomy of a wave, the different classifications of waves (and there are several!)
Introduction When it comes to waves, there are so many ways that waves can be talked about. Whether we are talking about the anatomy of a wave, the different classifications of waves (and there are several!)
Overview. Depth Limited Search. Depth Limited Search. COMP219: Artificial Intelligence. Lecture 8: Combining Search Strategies and Speeding Up
 COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search cheap
COMP219: Artificial Intelligence Lecture 8: Combining Search Strategies and Speeding Up Last time Basic problem solving techniques: Breadth-first search complete but expensive Depth-first search cheap
U11 Small Sided Competition Guidelines
 U11 Small Sided Competition Guidelines Age and developmentally appropriate lacrosse competition for boys playing in the U11 Age Classification Our Vision We envision a future that offers people everywhere
U11 Small Sided Competition Guidelines Age and developmentally appropriate lacrosse competition for boys playing in the U11 Age Classification Our Vision We envision a future that offers people everywhere
BOX RUN MARKER CONE DRILLS
 1 BOX RUN Box drills are an excellent activity to improve agility and body control. Lay out the cones as per image. Line up group behind the start cone. Groups of 6-8 are ideal for each box pattern. General
1 BOX RUN Box drills are an excellent activity to improve agility and body control. Lay out the cones as per image. Line up group behind the start cone. Groups of 6-8 are ideal for each box pattern. General
Bivariate Data. Frequency Table Line Plot Box and Whisker Plot
 U04 D02 Univariate Data Frequency Table Line Plot Box and Whisker Plot Univariate Data Bivariate Data involving a single variable does not deal with causes or relationships the major purpose of univariate
U04 D02 Univariate Data Frequency Table Line Plot Box and Whisker Plot Univariate Data Bivariate Data involving a single variable does not deal with causes or relationships the major purpose of univariate
INTRODUCTION TO PATTERN RECOGNITION
 INTRODUCTION TO PATTERN RECOGNITION 3 Introduction Our ability to recognize a face, to understand spoken words, to read handwritten characters all these abilities belong to the complex processes of pattern
INTRODUCTION TO PATTERN RECOGNITION 3 Introduction Our ability to recognize a face, to understand spoken words, to read handwritten characters all these abilities belong to the complex processes of pattern
Active for Life: GAG Activity
 T Dribbling and finishing in 1v1 situations 15 minutes Two teams of three players in an area 20x10m. Two small goals at each end as shown. The attack alternates from each end. Take a long touch to start
T Dribbling and finishing in 1v1 situations 15 minutes Two teams of three players in an area 20x10m. Two small goals at each end as shown. The attack alternates from each end. Take a long touch to start
The Standard Platform League
 The Standard Platform League Eric Chown 1 and Michail G. Lagoudakis 2 1 Bowdoin College, Brunswick, Maine, U.S.A. echown@bowdoin.edu 2 Technical University of Crete, Chania, Crete, Greece lagoudakis@ece.tuc.gr
The Standard Platform League Eric Chown 1 and Michail G. Lagoudakis 2 1 Bowdoin College, Brunswick, Maine, U.S.A. echown@bowdoin.edu 2 Technical University of Crete, Chania, Crete, Greece lagoudakis@ece.tuc.gr
Simple Simon GEN II Robot Soccer EV3 -Tris 10 Training Curriculum
 Simple Simon GEN II Robot Soccer EV3 -Tris 10 Training Curriculum Brian Thomas **LEGO, Mindstorms and Robolab are Registered Trademarks of the LEGO Corporation RoboCup Junior Australia Inc Copyright 2015
Simple Simon GEN II Robot Soccer EV3 -Tris 10 Training Curriculum Brian Thomas **LEGO, Mindstorms and Robolab are Registered Trademarks of the LEGO Corporation RoboCup Junior Australia Inc Copyright 2015
JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts
 JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts Jan Kodovský, Jessica Fridrich May 16, 2012 / IH Conference 1 / 19 What is JPEG-compatibility steganalysis? Detects embedding
JPEG-Compatibility Steganalysis Using Block-Histogram of Recompression Artifacts Jan Kodovský, Jessica Fridrich May 16, 2012 / IH Conference 1 / 19 What is JPEG-compatibility steganalysis? Detects embedding
Problem Solving as Search - I
 Problem Solving as Search - I Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University Slides prepared from Artificial Intelligence A Modern approach by Russell & Norvig Problem-Solving
Problem Solving as Search - I Shobhanjana Kalita Dept. of Computer Science & Engineering Tezpur University Slides prepared from Artificial Intelligence A Modern approach by Russell & Norvig Problem-Solving
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Neural Network in Computer Vision for RoboCup Middle Size League
 Journal of Software Engineering and Applications, 2016, *,** Neural Network in Computer Vision for RoboCup Middle Size League Paulo Rogério de Almeida Ribeiro 1, Gil Lopes 1, Fernando Ribeiro 1 1 Department
Journal of Software Engineering and Applications, 2016, *,** Neural Network in Computer Vision for RoboCup Middle Size League Paulo Rogério de Almeida Ribeiro 1, Gil Lopes 1, Fernando Ribeiro 1 1 Department
Session Dribbling / Gates. Set Up Gates Warm Up 20 minutes 15x15 yard grid Equipment: Cones, Balls
 Dribbling Week: 1 Session Dribbling / Gates Session Overview / Theme: Dribbling Training Session for an Intermediate level team. This session is one of a series of progressions utilizing Gate Dribbling
Dribbling Week: 1 Session Dribbling / Gates Session Overview / Theme: Dribbling Training Session for an Intermediate level team. This session is one of a series of progressions utilizing Gate Dribbling
Northern SC U6 Playing Format 3v3
 Northern SC U6 Playing Format 3v3 This document outlines guidelines for increasing the consistency of playing formations and terminology we use with U6 players. As players of this age may have different
Northern SC U6 Playing Format 3v3 This document outlines guidelines for increasing the consistency of playing formations and terminology we use with U6 players. As players of this age may have different
World Robot Olympiad WeDo 2.0 Pilot Regular Challenge. Game Description, Rules and Scoring. Sustainabots [Robots for sustainability]
![World Robot Olympiad WeDo 2.0 Pilot Regular Challenge. Game Description, Rules and Scoring. Sustainabots [Robots for sustainability]](/thumbs/82/85662896.jpg "World Robot Olympiad WeDo 2.0 Pilot Regular Challenge. Game Description, Rules and Scoring. Sustainabots [Robots for sustainability]") World Robot Olympiad 2017 WeDo 2.0 Pilot Regular Challenge Game Description, Rules and Scoring Sustainabots [Robots for sustainability] Sustainable Tourism Version: Final Version March 10 th Table of Contents
World Robot Olympiad 2017 WeDo 2.0 Pilot Regular Challenge Game Description, Rules and Scoring Sustainabots [Robots for sustainability] Sustainable Tourism Version: Final Version March 10 th Table of Contents
Specifications. The Field:
 ME 218b Winter 2008 Project: SPDL Happy Fun Ball Project Preview on February 29, 2008 6-10 pm (in SPDL) Grading Session on March 4, 2008 6-10 pm (in SPDL) Project Presentations on March 5, 2008 starting
ME 218b Winter 2008 Project: SPDL Happy Fun Ball Project Preview on February 29, 2008 6-10 pm (in SPDL) Grading Session on March 4, 2008 6-10 pm (in SPDL) Project Presentations on March 5, 2008 starting
Assignment #3 Breakout!
 Eric Roberts Handout #25 CS 106A January 22, 2010 Assignment #3 Breakout! Due: Wednesday, February 3, 5:00P.M. Your job in this assignment is to write the classic arcade game of Breakout, which was invented
Eric Roberts Handout #25 CS 106A January 22, 2010 Assignment #3 Breakout! Due: Wednesday, February 3, 5:00P.M. Your job in this assignment is to write the classic arcade game of Breakout, which was invented
RoboCup Standard Platform League (NAO) Technical Challenges
 Technical Challenges") RoboCup Standard Platform League (NAO) Technical Challenges RoboCup Technical Committee (2014 rules, as of June 19, 2014) At RoboCup 2014, the Standard Platform League will hold three different technical
RoboCup Standard Platform League (NAO) Technical Challenges RoboCup Technical Committee (2014 rules, as of June 19, 2014) At RoboCup 2014, the Standard Platform League will hold three different technical
Planning and Acting in Partially Observable Stochastic Domains
 Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Robot Activity: Programming the NXT 2.0
 Robot Activity: Programming the NXT 2.0 About this Activity In this activity, you will learn about some features of the NXT 2.0 programming software. You will write and save a program for the Lego NXT
Robot Activity: Programming the NXT 2.0 About this Activity In this activity, you will learn about some features of the NXT 2.0 programming software. You will write and save a program for the Lego NXT
AndroSot (Android Soccer Tournament) Laws of the Game 2010
 Laws of the Game 2010") AndroSot (Android Soccer Tournament) Laws of the Game 2010 Tzuu-Hseng Steve Li Advanced Intelligent Robot and System (airobots) Laboratory Department of Electrical Engineering National Cheng Kung University
AndroSot (Android Soccer Tournament) Laws of the Game 2010 Tzuu-Hseng Steve Li Advanced Intelligent Robot and System (airobots) Laboratory Department of Electrical Engineering National Cheng Kung University
7 th International Conference on Wind Turbine Noise Rotterdam 2 nd to 5 th May 2017
 7 th International Conference on Wind Turbine Noise Rotterdam 2 nd to 5 th May 2017 Sound power level measurements 3.0 ir. L.M. Eilders, Peutz bv: l.eilders@peutz.nl ing. E.H.A. de Beer, Peutz bv: e.debeer@peutz.nl
7 th International Conference on Wind Turbine Noise Rotterdam 2 nd to 5 th May 2017 Sound power level measurements 3.0 ir. L.M. Eilders, Peutz bv: l.eilders@peutz.nl ing. E.H.A. de Beer, Peutz bv: e.debeer@peutz.nl
Performance & Motor Control Characteristics of Functional Skill. Part III: Throwing, Catching & Hitting
 Performance & Motor Control Characteristics of Functional Skill Part III: Throwing, Catching & Hitting Throwing Interesting Facts Studies indicate that boys move across the stages at a faster rate than
Performance & Motor Control Characteristics of Functional Skill Part III: Throwing, Catching & Hitting Throwing Interesting Facts Studies indicate that boys move across the stages at a faster rate than
THE TEN PRINCIPLES OF POSSESSION SOCCER. February 2017 Jacob Daniel, Georgia Soccer Director of Coaching and Region III Boys ODP Technical Director
 THE TEN PRINCIPLES OF POSSESSION SOCCER February 2017 Jacob Daniel, Georgia Soccer Director of Coaching and Region III Boys ODP Technical Director THE CURRENT PLAYER DEVELOPMENT CYCLE PROMOTES SHORT TERMISM
THE TEN PRINCIPLES OF POSSESSION SOCCER February 2017 Jacob Daniel, Georgia Soccer Director of Coaching and Region III Boys ODP Technical Director THE CURRENT PLAYER DEVELOPMENT CYCLE PROMOTES SHORT TERMISM
Gait Analyser. Description of Walking Performance
 Gait Analyser Description of Walking Performance This brochure will help you to understand clearly the parameters described in the report of the Gait Analyser, provide you with tips to implement the walking
Gait Analyser Description of Walking Performance This brochure will help you to understand clearly the parameters described in the report of the Gait Analyser, provide you with tips to implement the walking
Northern SC U12 Playing Formats 8v8 (7 field players + 1 GK)
") Northern SC U12 Playing Formats 8v8 (7 field players + 1 ) This document outlines guidelines for increasing the consistency of playing formations and terminology we use with U12 players. As players of
Northern SC U12 Playing Formats 8v8 (7 field players + 1 ) This document outlines guidelines for increasing the consistency of playing formations and terminology we use with U12 players. As players of
RoboCupJunior New Zealand GEN II Soccer Rules 2015
 RoboCupJunior New Zealand GEN II Soccer Rules 2015 Index 1. Playing Field...... page 1 2. Ball...... page 2 3. Robots...... page 2 4. Game Play...... page 4 5. Conflict resolution...... page 7 6. Inspection......
RoboCupJunior New Zealand GEN II Soccer Rules 2015 Index 1. Playing Field...... page 1 2. Ball...... page 2 3. Robots...... page 2 4. Game Play...... page 4 5. Conflict resolution...... page 7 6. Inspection......
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit
 TEKS/LINKS Student Objectives One Credit") Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit Suggested Time Ranges First Six Weeks History of Manufacturing PFD 1.1(A) The student will describe why and how manufacturing
Computer Integrated Manufacturing (PLTW) TEKS/LINKS Student Objectives One Credit Suggested Time Ranges First Six Weeks History of Manufacturing PFD 1.1(A) The student will describe why and how manufacturing
THE DIGI LOGO BRAND ELEMENTS. The new Digi logo is based on precision, technology, and connection.
 THE DIGI LOGO The new Digi logo is based on precision, technology, and connection. It breaks out the Digi name from the enclosing green rectangle of the previous logo, visually setting the name free from
THE DIGI LOGO The new Digi logo is based on precision, technology, and connection. It breaks out the Digi name from the enclosing green rectangle of the previous logo, visually setting the name free from
Cricket umpire assistance and ball tracking system using a single smartphone camera
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 Cricket umpire assistance and ball tracking system using a single smartphone camera Udit Arora
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 Cricket umpire assistance and ball tracking system using a single smartphone camera Udit Arora
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION Task and Rules Document
 NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
NATIONAL INSTRUMENTS AUTONOMOUS ROBOTICS COMPETITION 2018 2018 Task and Rules Document Table of Contents Competition Background:... 2 Theme: Autonomous Vehicles Fast Track to the Future... 2 Design Elements
DAInamite. Team Description 2016
 DAInamite Team Description 2016 Yuan Xu, Martin Berger, Qian Qian and Erdene-Ochir Tuguldur {yuan.xu, martin.berger, tuguldur.erdene-ochir}@dai-labor.de DAI-Labor, Technische Universität Berlin, Germany
DAInamite Team Description 2016 Yuan Xu, Martin Berger, Qian Qian and Erdene-Ochir Tuguldur {yuan.xu, martin.berger, tuguldur.erdene-ochir}@dai-labor.de DAI-Labor, Technische Universität Berlin, Germany
World Robot Olympiad 2018
 World Robot Olympiad 2018 WRO Football Game Description, Rules and Scoring Version: Final Version January 15 th Table of Contents WRO 2018 WRO Football - Game Description, Rules, and Scoring Introduction...
World Robot Olympiad 2018 WRO Football Game Description, Rules and Scoring Version: Final Version January 15 th Table of Contents WRO 2018 WRO Football - Game Description, Rules, and Scoring Introduction...
Lesson 2.1 Frequency Tables and Graphs Notes Stats Page 1 of 5
 Stats Page 1 of 5 Frequency Table: partitions data into classes or intervals and shows how many data values are in each class. The classes or intervals are constructed so that each data value falls exactly
Stats Page 1 of 5 Frequency Table: partitions data into classes or intervals and shows how many data values are in each class. The classes or intervals are constructed so that each data value falls exactly
Autodesk Moldflow Communicator Process settings
 Autodesk Moldflow Communicator 212 Process settings Revision 1, 3 March 211. Contents Chapter 1 Process settings....................................... 1 Profiles.................................................
Autodesk Moldflow Communicator 212 Process settings Revision 1, 3 March 211. Contents Chapter 1 Process settings....................................... 1 Profiles.................................................
AGILITY - TAIL TAG ACTIVITY 1 HURLING / FOOTBALL FITNESS EXERCISE. Name:
 Name: james.meagher.gda.kilkenny@gaa.ie ACTIVITY 1 AGILITY - TAIL TAG HURLING / FOOTBALL FITNESS EXERCISE This exercise to develop agility skills is generally suitable for players of 4-6 years Place a
Name: james.meagher.gda.kilkenny@gaa.ie ACTIVITY 1 AGILITY - TAIL TAG HURLING / FOOTBALL FITNESS EXERCISE This exercise to develop agility skills is generally suitable for players of 4-6 years Place a
Rules of Soccer Simulation League 2D
 Rules of Soccer Simulation League 2D (RoboCup2016 Leipzig, Germany) This document contains the rules for the RoboCup2016 Soccer Simulation League 2D competition in Leipzig, Germany. 1. Soccer Simulator
Rules of Soccer Simulation League 2D (RoboCup2016 Leipzig, Germany) This document contains the rules for the RoboCup2016 Soccer Simulation League 2D competition in Leipzig, Germany. 1. Soccer Simulator
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
2010 ACHPER HEALTH & PHYSICAL EDUCATION CONFERENCE
 2010 ACHPER HEALTH & PHYSICAL EDUCATION CONFERENCE Monash University, Clayton Thursday 25th November Minor Games for Developing Strategy in Invasion Sports Presenter: Ray Breed High Performance Coach North
2010 ACHPER HEALTH & PHYSICAL EDUCATION CONFERENCE Monash University, Clayton Thursday 25th November Minor Games for Developing Strategy in Invasion Sports Presenter: Ray Breed High Performance Coach North
STAGE 2 ACTIVITIES 6-8 YEAR OLD PLAYERS. NSCAA Foundations of Coaching Diploma
 STAGE 2 ACTIVITIES 6-8 YEAR OLD PLAYERS NSCAA Foundations of Coaching Diploma 2V2 SHOOTING GAME This is a dynamic activity that emphasizes individual and small group attacking and defending. The action
STAGE 2 ACTIVITIES 6-8 YEAR OLD PLAYERS NSCAA Foundations of Coaching Diploma 2V2 SHOOTING GAME This is a dynamic activity that emphasizes individual and small group attacking and defending. The action
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Rainier Soccer Alliance Puyallup. (Puyallup Soccer Union) U6 Micros Program. U4-U6...Player Development for the Future!
 U6 Micros Program. U4-U6...Player Development for the Future!") Rainier Soccer Alliance Puyallup (Puyallup Soccer Union) U6 Micros Program U4-U6...Player Development for the Future! The Mission The mission of Rainer Soccer Alliance Puyallup (PSU) is for the U6 Micro
Rainier Soccer Alliance Puyallup (Puyallup Soccer Union) U6 Micros Program U4-U6...Player Development for the Future! The Mission The mission of Rainer Soccer Alliance Puyallup (PSU) is for the U6 Micro
ANSWERS TO QUESTIONS IN THE NOTES AUTUMN 2018
 ANSWERS TO QUESTIONS IN THE NOTES AUTUMN 2018 Section 1.2 Example. The discharge in a channel with bottom width 3 m is 12 m 3 s 1. If Manning s n is 0.013 m -1/3 s and the streamwise slope is 1 in 200,
ANSWERS TO QUESTIONS IN THE NOTES AUTUMN 2018 Section 1.2 Example. The discharge in a channel with bottom width 3 m is 12 m 3 s 1. If Manning s n is 0.013 m -1/3 s and the streamwise slope is 1 in 200,
Qualification Document for RoboCup 2016
 1 Qualification Document for RoboCup 2016 Finn Poppinga, Patrick Göttsch, Arne Hasselbring, Finn Linzer, Pascal Loth, Thomas Schattschneider, Erik Schröder, and Oliver Tretau Hamburg University of Technology,
1 Qualification Document for RoboCup 2016 Finn Poppinga, Patrick Göttsch, Arne Hasselbring, Finn Linzer, Pascal Loth, Thomas Schattschneider, Erik Schröder, and Oliver Tretau Hamburg University of Technology,
BAYSA. U6 Coaching Manual
 BAYSA U6 Coaching Manual U6 players should be having fun with the ball by playing games/activities that encourage the children to want the ball at their feet, while learning new skills. At this age, it
BAYSA U6 Coaching Manual U6 players should be having fun with the ball by playing games/activities that encourage the children to want the ball at their feet, while learning new skills. At this age, it
USER GUIDE USER GUIDE
 1 TABLE OF CONTENTS GETTING STARTED 2 Included in the box 2 Compatible smartphones 2 Accessories: 2 Download Mobitee and PIQ application 2 GET STARTED WITH MOBITEE AND PIQ 3 Create your Account and Login
1 TABLE OF CONTENTS GETTING STARTED 2 Included in the box 2 Compatible smartphones 2 Accessories: 2 Download Mobitee and PIQ application 2 GET STARTED WITH MOBITEE AND PIQ 3 Create your Account and Login
FUBA RULEBOOK VERSION
 FUBA RULEBOOK 15.07.2018 2.1 VERSION Introduction FUBA is a board game, which simulates football matches from a tactical view. The game includes its most important details. The players take roles of the
FUBA RULEBOOK 15.07.2018 2.1 VERSION Introduction FUBA is a board game, which simulates football matches from a tactical view. The game includes its most important details. The players take roles of the
Computer Simulation Helps Improve Vertical Column Induced Gas Flotation (IGF) System
 System") JOURNAL ARTICLES BY FLUENT SOFTWARE USERS JA187 Computer Simulation Helps Improve Vertical Column Induced Gas Flotation (IGF) System Computer simulation has helped NATCO engineers make dramatic improvements
JOURNAL ARTICLES BY FLUENT SOFTWARE USERS JA187 Computer Simulation Helps Improve Vertical Column Induced Gas Flotation (IGF) System Computer simulation has helped NATCO engineers make dramatic improvements
The Soccer Guy. By Marcus Hilgers Faisal Ahmad Jacob Borer
 The Soccer Guy By Marcus Hilgers Faisal Ahmad Jacob Borer 1.0 Abstract The Soccer Guy automaton was created to provide a fun, interactive, simple game. It uses simple mechanical and computational elements
The Soccer Guy By Marcus Hilgers Faisal Ahmad Jacob Borer 1.0 Abstract The Soccer Guy automaton was created to provide a fun, interactive, simple game. It uses simple mechanical and computational elements
Sony Four Legged Robot Football League Rule Book
 Sony Four Legged Robot Football League Rule Book RoboCup Technical Committee (As of July 3, 2005) Contents 1 Setup of the Environment 1 2 Robot Players 3 3 Game Process 7 4 Forbidden Actions and Penalties
Sony Four Legged Robot Football League Rule Book RoboCup Technical Committee (As of July 3, 2005) Contents 1 Setup of the Environment 1 2 Robot Players 3 3 Game Process 7 4 Forbidden Actions and Penalties
Assignment 3: Breakout!
 CS106A Winter 2011-2012 Handout #16 February 1, 2011 Assignment 3: Breakout! Based on a handout by Eric Roberts and Mehran Sahami Your job in this assignment is to write the classic arcade game of Breakout,
CS106A Winter 2011-2012 Handout #16 February 1, 2011 Assignment 3: Breakout! Based on a handout by Eric Roberts and Mehran Sahami Your job in this assignment is to write the classic arcade game of Breakout,
Robots as Individuals in the Humanoid League
 Robots as Individuals in the Humanoid League Maike Paetzel 1, Jacky Baltes 2, and Reinhard Gerndt 3 1 Uppsala Univeristy, 75105 Uppsala, Sweden, maike.paetzel@it.uu.se, http://bit-bots.de 2 University
Robots as Individuals in the Humanoid League Maike Paetzel 1, Jacky Baltes 2, and Reinhard Gerndt 3 1 Uppsala Univeristy, 75105 Uppsala, Sweden, maike.paetzel@it.uu.se, http://bit-bots.de 2 University
DAInamite. Team Description 2014
 DAInamite Team Description 2014 Axel Heßler, Yuan Xu, Erdene-Ochir Tuguldur and Martin Berger {axel.hessler, yuan.xu, tuguldur.erdene-ochir, martin.berger}@dai-labor.de http://www.dainamite.de DAI-Labor,
DAInamite Team Description 2014 Axel Heßler, Yuan Xu, Erdene-Ochir Tuguldur and Martin Berger {axel.hessler, yuan.xu, tuguldur.erdene-ochir, martin.berger}@dai-labor.de http://www.dainamite.de DAI-Labor,
Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities.
 Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities. Background & Research Question There are many different styles and categories when
Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities. Background & Research Question There are many different styles and categories when
Introduction to Pattern Recognition
 Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 19 January 2011 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 19 January 2011 1 / 32 Examples of Pattern Recognition in
Introduction to Pattern Recognition Jason Corso SUNY at Buffalo 19 January 2011 J. Corso (SUNY at Buffalo) Introduction to Pattern Recognition 19 January 2011 1 / 32 Examples of Pattern Recognition in
Rescue Rover. Robotics Unit Lesson 1. Overview
 Robotics Unit Lesson 1 Overview In this challenge students will be presented with a real world rescue scenario. The students will need to design and build a prototype of an autonomous vehicle to drive
Robotics Unit Lesson 1 Overview In this challenge students will be presented with a real world rescue scenario. The students will need to design and build a prototype of an autonomous vehicle to drive
2 When Some or All Labels are Missing: The EM Algorithm
 CS769 Spring Advanced Natural Language Processing The EM Algorithm Lecturer: Xiaojin Zhu jerryzhu@cs.wisc.edu Given labeled examples (x, y ),..., (x l, y l ), one can build a classifier. If in addition
CS769 Spring Advanced Natural Language Processing The EM Algorithm Lecturer: Xiaojin Zhu jerryzhu@cs.wisc.edu Given labeled examples (x, y ),..., (x l, y l ), one can build a classifier. If in addition
EDMONTON MINOR SOCCER ASSOCIATION
 EDMONTON MINOR SOCCER ASSOCIATION U7/U8 CITY WIDE PROGRAM U-7 U-8 (7 V 7) SOCCER RULES REVISED FEBRUARY, 2017 LAW I THE FIELD: A. DIMENSIONS: THE FIELD OF PLAY SHALL BE RECTANGULAR. THE PLAYING AREA SHOULD
EDMONTON MINOR SOCCER ASSOCIATION U7/U8 CITY WIDE PROGRAM U-7 U-8 (7 V 7) SOCCER RULES REVISED FEBRUARY, 2017 LAW I THE FIELD: A. DIMENSIONS: THE FIELD OF PLAY SHALL BE RECTANGULAR. THE PLAYING AREA SHOULD
Putting Report Details: Key and Diagrams: This section provides a visual diagram of the. information is saved in the client s database
 Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
Assignment #3 Breakout! Due: 12pm on Wednesday, February 6th This assignment should be done individually (not in pairs)
") Chris Piech Assn #3 CS 106A January 28, 2019 Assignment #3 Breakout! Due: 12pm on Wednesday, February 6th This assignment should be done individually (not in pairs) Based on a handout by Eric Roberts with
Chris Piech Assn #3 CS 106A January 28, 2019 Assignment #3 Breakout! Due: 12pm on Wednesday, February 6th This assignment should be done individually (not in pairs) Based on a handout by Eric Roberts with
SegwayRMP Robot Football League Rules
 SegwayRMP Robot Football League Rules CORAL Group Carnegie Mellon University March 29, 2004 1 Contents 1 Introduction 3 2 The Field 3 3 The Players 4 3.1 Segway RMP Robots...............................
SegwayRMP Robot Football League Rules CORAL Group Carnegie Mellon University March 29, 2004 1 Contents 1 Introduction 3 2 The Field 3 3 The Players 4 3.1 Segway RMP Robots...............................
ITTC Recommended Procedures and Guidelines
 Page 1 of 6 Table of Contents 1. PURPOSE...2 2. PARAMETERS...2 2.1 General Considerations...2 3 DESCRIPTION OF PROCEDURE...2 3.1 Model Design and Construction...2 3.2 Measurements...3 3.5 Execution of
Page 1 of 6 Table of Contents 1. PURPOSE...2 2. PARAMETERS...2 2.1 General Considerations...2 3 DESCRIPTION OF PROCEDURE...2 3.1 Model Design and Construction...2 3.2 Measurements...3 3.5 Execution of
RoboCup Four-Legged League Rule Book
 RoboCup Four-Legged League Rule Book RoboCup Technical Committee (2006 rules, as of April 20, 2006) Contents 1 Setup of the Environment 1 2 Robot Players 3 3 Game Process 7 4 Forbidden Actions and Penalties
RoboCup Four-Legged League Rule Book RoboCup Technical Committee (2006 rules, as of April 20, 2006) Contents 1 Setup of the Environment 1 2 Robot Players 3 3 Game Process 7 4 Forbidden Actions and Penalties
2 Step 2 Dance Studio Spotting
 Spotting Pre-requisite What is Spotting What causes vertigo while spinning? Know how to spin (See Spin, Spin, Spin ) Spotting is a technique used by dancers to minimize or completely eliminate the feeling
Spotting Pre-requisite What is Spotting What causes vertigo while spinning? Know how to spin (See Spin, Spin, Spin ) Spotting is a technique used by dancers to minimize or completely eliminate the feeling
3. Select a colour and then use the Rectangle drawing tool to draw a rectangle like the one below.
 Pong Game Creating the Bat 1. Delete the cat sprite. 2. Click the Paint new sprite button. 3. Select a colour and then use the Rectangle drawing tool to draw a rectangle like the one below. 4. Click the
Pong Game Creating the Bat 1. Delete the cat sprite. 2. Click the Paint new sprite button. 3. Select a colour and then use the Rectangle drawing tool to draw a rectangle like the one below. 4. Click the