Riviera Beach Maritime Academy ROV Club Mariners
|
|
|
- Ashley Osborne
- 5 years ago
- Views:
Transcription



1 Riviera Beach Maritime Academy ROV Club Mariners Team members: John-Marc Diot Class of 2007 David Maxwell Class of 2007 Jonnatan Medina Class of 2007 Katrina Ginocchio Class of 2008 Jamie Bostrom Class of 2009 Joey Young Class of 2009 Cody Muntz Class of 2010 Micaiah Wells Class of 2010 Teacher Advisors: Mr. David Sellepack Mr. George Bradbury Captain Gidget Greco Mentors: Lockheed Martin



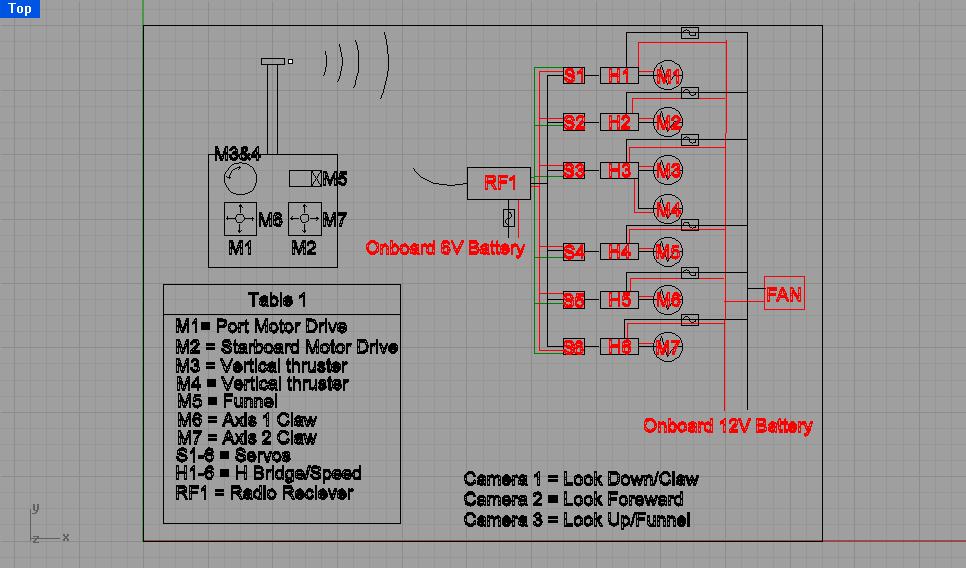
2 Katrina assembling manipulator H-bridge Funneled suction device Abstract This year s Riviera Beach Maritime Academy ROV design is based on the last year s body, thruster and control design. It was found to have optimum control, maneuverability and size to complete the missions at hand. Modifications include the removal of last year s tool package and the addition of a new frame mounting system, tether, cameras, and a replacement of the old circuitry. Reusing last years body and control system allows the team a proven platform and to work within a smaller budget constraint. The tool design considerations have led to a simple, robust tool frame which provides a mounting area for tools and cameras. This frame was also designed with the ability for expansion in the future.
3 Budget/Expense Sheet Period: School Name: Riviera Beach Maritime Academy From: 10/1/2006 Instructor/Sponsor: George Bradbury To: 6/31/2007 Funds $8000 donation from PB Marine Industries Association Date Deposit or Expense Description Notes Amount Balance 11/7/2006 Expense H-Bridge Controllers $8, $125 $7,875 3/20/2007 Expense RF Reciever $ $ $ 7, /30/2007 Expense Trip Cost $ 2, $ 2, $ 4, /16/2007 Expense Hotel $ 1, $ 1, $ 3, /21/2007 Expense Rental Car $ $ $ 2, /7/2007 Donated Scotch Weld 8005 $ 2, /16/2007 Donated PVC Board $ 2, /21/2007 Expense PVC Tube $ $ $ 2, /30/2007 Expense Gas $ $ $ 2, /16/2007 Donated Batteries $ 2, /16/2007 Expense Solder $ $ $ 2, /21/2007 Expense Camera $ $ $ 2,000.00
4
5
6
7
8 Challenge It is to be expected that during the course of the build year there will be certain challenges to overcome. This year the main challenge arose with the decision on how to complete the task of inserting a hot stab into a 45 degree angle wellhead. From the start the idea was to use a specific tool to accomplish this task, but as how the tool would work many opinions came to the table. The initial design called for a housing to hold the hot stab which would release it into the wellhead. To hold the hot stab in the housing it would need a latch mechanism. Many ideas came forward including a pulley rigged latch that would be released with a motor. Also was the thought of having it triggered when the housing tilted over to meet the 45. Then came the matter of projecting the stab into the wellhead, since it was deemed gravity alone could not insert the stab well enough. This was going to be either launched by either a CO2 canister or a spring, with opinions split between the two. It seemed the only agreeable part of this tool was that it would be reeled back into the housing by a small electric motor. After much deliberation the final design consisted of a housing tapered at the tip. It would be held in by a latch that would be released via push rod which would open the latch upon hitting the opening of the well head. With the latch released a compression spring within the housing would provide the push for insertion. Once the hot stab was inserted for a length of time deemed long enough by the judges it would be recovered by a small electric motor. This entire housing was to be mounted on the ROV on a hinge allowing the housing to tilt to the 45 degree angled wellhead so as not to tilt the entire ROV causing buoyancy shift which could potentially threaten the ROV. After much debate and time the design for this tool had finally been complete. The next step was simply to build what had been laid out. However, with the parts list finalized it came to the team s realization that with the manipulator the task of inserting and retrieving the hot stab could be completed much simpler. This tool took much time and deliberation and once finalized it was determined unnecessary. Not only was the challenge in determining the design of the tool, but in accepting that much time was lost to designing the tool. It is seen among the team now that it was not a complete loss of time. This tool taught us valuable teamwork skills and the ability to incorporate many ideas and to choose the best to suit the task. Plus we realized once again that a more complex tool is not always a better way to accomplish a task.
9 Design Rational To decide and explain which instrumentation we would use on the ROV this year, we set up a flow chart to describe the missions and tasks needed to be accomplished and what tools and other devices could be used. At the end of the chart we summarized the different tools to find what could be used for multiple use and purpose. Mission #1- threading messenger line Attach line to ROV Locate base Thread through u-bolt Return line to surface Mission #2- algae, jellyfish, and PAS instrument Locate algae Collect algae Locate jellyfish Collect jellyfish Carry PAS to bottom Locate designated drop area Place PAS into designated drop area Return to surface Mission #3- wellhead gasket and hot stab Descend with gasket Descend with hot stab Locate wellhead Insert hot stab Release hot stab Remove well cap Insert Gasket Replace Cap Retrieve hot stab Tool fixed probe survey camera fixed probe manipulator with 2 axes upward facing camera funneled suction device survey camera fixed probe probe and manipulator survey camera upward navigation camera fixed probe manipulator survey camera angle manipulator manipulator fixed probe manipulator manipulator 1 survey camera 1 forward tools camera 1 upward tool/navigation camera 1 manipulator with 2 axes 1 funneled suction device 1 fixed forward probe The main body structure of the ROV is that of last year s design. Its cylindrical shape was chosen because of the shape s ability to resist pressure and ease of waterproofing. Improvements were made to last year s structure to resolve issues with water intrusion. These improvements include better sealing the thruster mounts and using
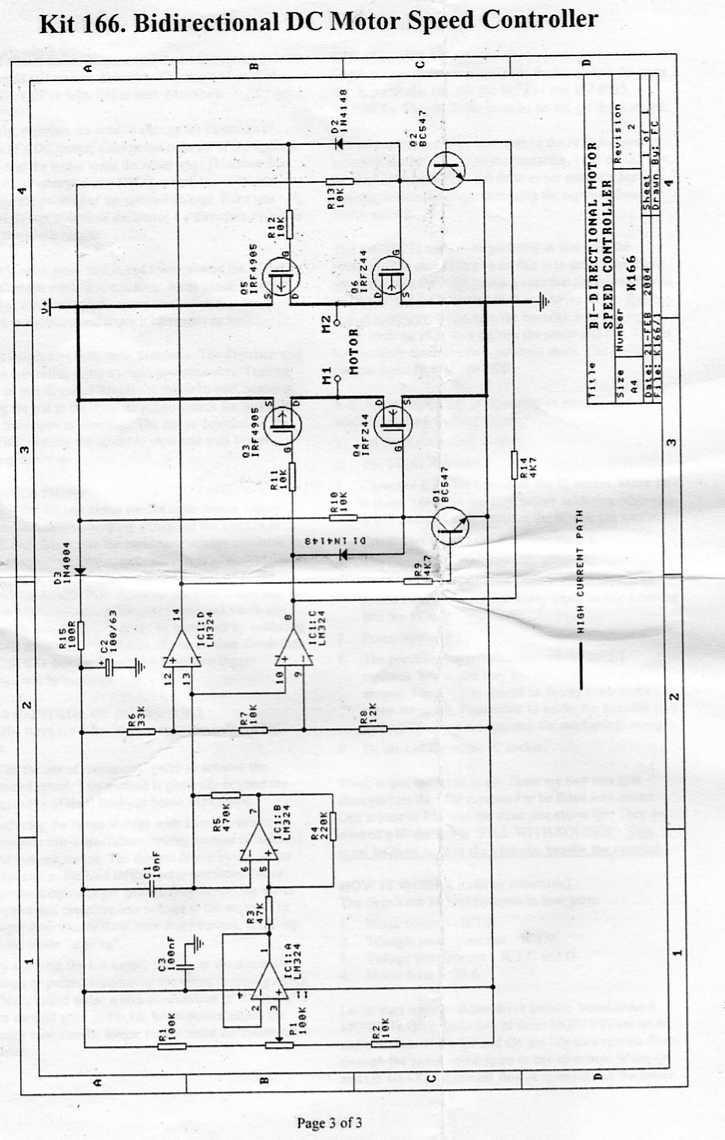
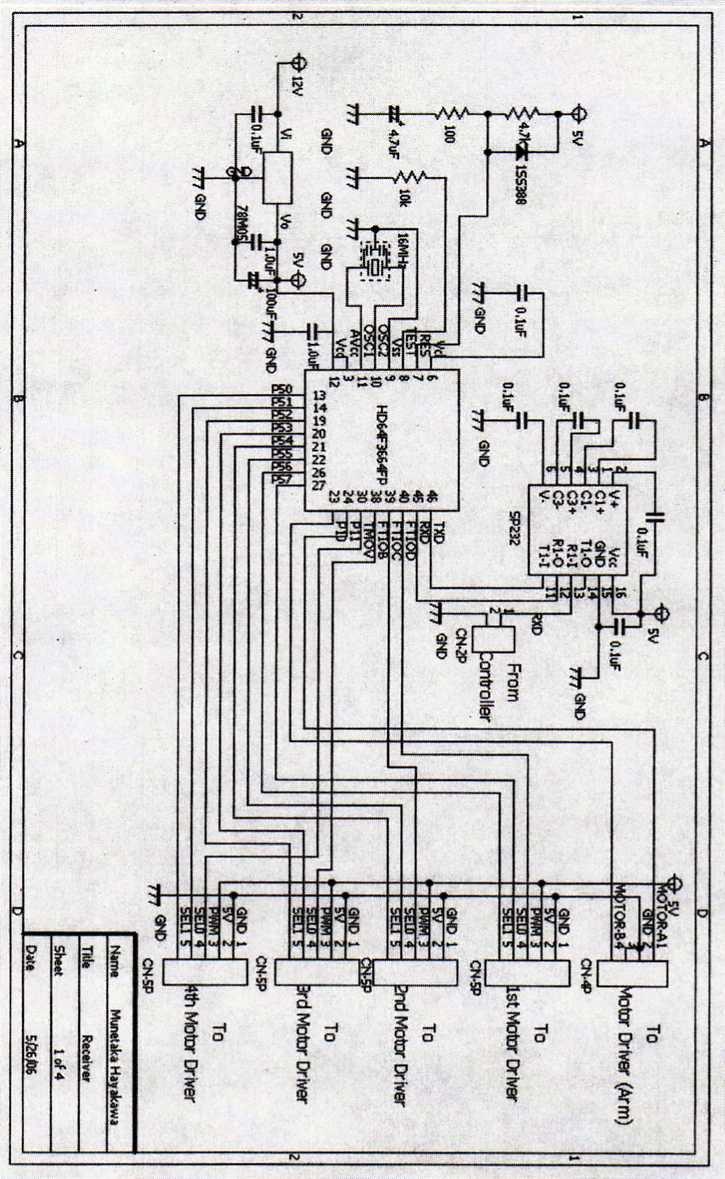
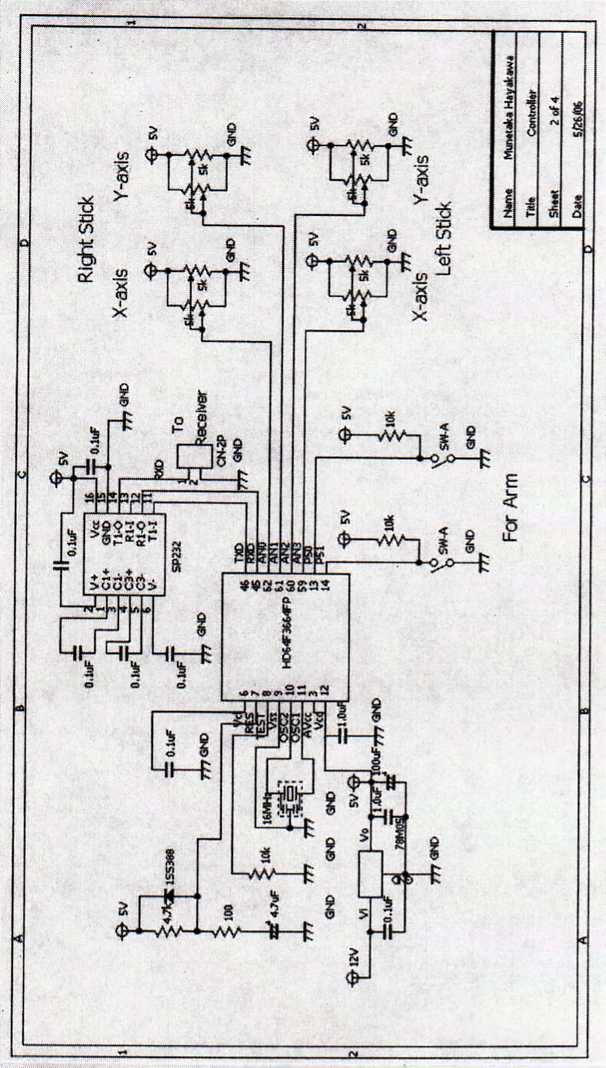
10 a water sensing unit inside of the ROV. The sensing unit consists of two wires with one end of each placed on the bottom of the inside body spaced slightly apart. The wires will lead to the surface and be connected to a multimeter to test for any continuity. This year the ROV will be controlled using a RC sending unit that sends the radio frequency signal down the tether via antenna to a RC receiver to control servos which are linked to the H-bridge potentiometers. These H-bridges control the speed and direction of the motors. The antenna consists of only one tether wire as opposed to the five used last year. Using on board power allows us to eliminate four wires from last year. Those, plus cameras, gives us a tether that has only four cables rather than last years ten. Reducing the size of the tether is a great improvement over the previous year which caused a loss of valuable maneuverability. Four thrusters are attached to the main vehicle and are housed within PVC couplings with holes cut into the sides to allow the water to flow around the propellers. The motors are oriented with two facing the bottom of the ROV, and two facing toward the back of the ROV. This set up will give the most control of the ROV in its horizontal and vertical axes. This year, all components of the ROV have their buoyancy calculated before being attached and submerged. The team s goal was slight positive buoyancy. This is to allow for the ROV to reach neutral buoyancy at full depth and to also aide in the ROV s ascension. To accurately measure the buoyancy of each object, the team first measured the volume of each component in a test chamber we created. By measuring the weight of the water displaced by each object and then taking into consideration the force of gravity, we determined the buoyant force of each object. Doing this allowed the team to eliminate the guess and check method used in the past and replaced it with this more accurate measuring technique. After reviewing the missions needed to be accomplished it was apparent that a manipulator we be an excellent tool for completing a variety of tasks. The manipulator design consists of one elbow joint and one jaw joint. It uses two modified bilge pumps which use threaded rod actuation to raise or low and open and close the jaw. The entire device was designed in Rhino CAD from which a prototype was built out of plywood to test the size, clearances, and actuation. The final product will be built from PVC board which provides ease of fabrication and durability. The mission involving retrieving an algal sample could not be accomplished with the manipulator already designed. Given the control system and design of the ROV it was determined that a new simple tool could be added to complete this task. A funneled suction device was designed out of components which we had on hand. It consists of a funnel with a membrane stretched across the wide opening and a hole centered in it for which the algae sample will move through but not escape. The funnel will be a suction tool powered by an unmodified bilge pump of which we also had on hand. The membrane was made from resistance bands used for physical therapy. The funnel attached to the bilge pumps with set screw for easy removal with the exhaust vectored around the ROV to be expelled downward, thereby creating an extra push up on the algae for better extraction. To create adequate mounting space on the ROV for all the new components without having to compromise the hull structure, a PVC frame was fabricated to fit around the vehicle. In order to secure the new frame to the ROV, strong adhesives and set
11 screws are used. To optimize the effectiveness of the manipulator a probe is fixed facing forward from. This fixed probe will be used in conjunction with the manipulator and on its own to complete tasks in all three missions. In order to navigate and complete tasks it was determined that the ROV would need three cameras. One camera mounted in the nose of the vehicle is used for observing the manipulator and fixed probe. The second camera, mounted on the forward part of the frame will be used for general navigation, unobstructed by the tool packages. A third and final camera will be placed on the upper aft section of the frame to both navigate under the ice and to position the funnel device. Troubleshooting Within the tools designs there laid a few issues to be resolved. Firstly the original manipulator design incorporated a gear actuation that was found to turn too fast for the application. A threaded rod design resolved that problem by slowing the movement of the joints to slower speeds for greater control. With the funnel tool it was extremely hard to find a practical membrane until one of the members broke his leg and came into possession of a resistance band used for physical therapy. After analyzing the material it was determined perfect for our needs and free of charge. After attempting to rebuild last year s control system it was determined that the damaged components could not be salvaged and that a different system was needed. After much research a solution was found and a new control method developed. With all the obstacles we faced as a team it was the look towards the ends which ultimately provided us with the means to accomplish the tasks set before us. Lessen learned/ Skills gained Having a team made up of only one returning team member left much to be learned to bridge the gap from last year s accomplishments to our current endeavor. Thanks to the help of our teachers and sponsors, our team was able to learn how to form ideas then make them a reality. Each member came into his or her own learning their individual strong points and how to coordinate them into the team to obtain the best possible results. Future Improvements It is always the aim of the club to reach out to more of the student population and gain interest in this unique field. In future years it is hoped that more students will join this team bringing a large base on which to build not only a working machine but a connection between team members only an experience such as this can create. This club is an amazing experience that not only should be known throughout the school, but the community as well. On the technical side, it was decided at the beginning of the build year that the ROV was to be based on last years design. The main problem with this was that it would have to be modified in order to complete the new missions. A simple solution was adding
12 a light frame around the main structure that not only accommodated this years tool packages, but would allow for expansion in future years. The controls for the previous year was based on a RC sending unit which was hard wired to send serial communications to a microcontroller programmed to use pulse width modulation to control the H-bridges. Next year the H-bridges will be controlled with a microcontroller programmed by the team members with Q-BASIC. Reflection This was an amazing year for the entire RBMA ROV club. Much was learned and shared between all the members. We are proud to have worked together towards such an outstanding goal. The knowledge gained this year far exceeds anything any member would have expected for him/her self and what any of us would consider their normal interests. It is that thought which has all members realize that this is an experience which will be carried with them the rest of their lives no matter the outcome of the actual competition. People of the Arctic In the arctic there can be found indigenous people that inhabit Alaska, Russia, and Canada. In Alaska there can be found three main groups of native, sixteen in Russia and three in Canada. It is believed that the first inhabitants of the North American arctic came over the land bridge, Beringia, which connected Siberia to Alaska about years ago. These culture relied heavily on what could be hunted consisting of sea mammals and fish. The tools developed were largely made of sharpened stone used to make spears and knives. Once these peoples became established in the regions around the arctic the abundance of food allowed for a permanence and formation of societies. Technology was not only advanced in tools and weapons but in house building. They developed small semi-subterranean structure which efficiently retained heat. Being more permanent also allowed these people to expand the technologies even further. Creating new boats covered in skins, hunting of even larger game, including whales, became a reality. Acknowledgements The RBMA ROV club members would like to thank all those who have helped to make this year s ROV become a reality. Thank you, teacher advisors, Captain Greco, Mr. Bradbury, and Mr. Sellepack for spending a great deal of time with every member to teach valuable skills needed to become productive team members. Also, the RMBA ROV club thanks our mentors from Lockheed Martin for all of their assistance with teaching essential skills and sharing their insight on the professional world of underwater robotics.
Figure 8: Looking Down on a Three Thruster Vehicle
 Moving and Maneuvering 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and
Moving and Maneuvering 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and
Holothuroidea and 007
 Holothuroidea and 007 Palm Beach Lakes Community High School ROV Club Team Piranha Team Members: Jodie Boisvert Class of 2006 Laura Edie Class of 2006 Erin Engler Class of 2006 Munetaka Hayakawa Class
Holothuroidea and 007 Palm Beach Lakes Community High School ROV Club Team Piranha Team Members: Jodie Boisvert Class of 2006 Laura Edie Class of 2006 Erin Engler Class of 2006 Munetaka Hayakawa Class
General Competition Rules (Rules based on the SeaPerch National Challenge rules)
") University of New Hampshire 2015 Seacoast SeaPerch Challenge April 11, 2015 General Competition Rules (Rules based on the SeaPerch National Challenge rules) 1. On competition day there will be three competition
University of New Hampshire 2015 Seacoast SeaPerch Challenge April 11, 2015 General Competition Rules (Rules based on the SeaPerch National Challenge rules) 1. On competition day there will be three competition
PropaGator Autonomous Surface Vehicle
 PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
Figure 1: Hydrostatic Pressure Forces Are Perpendicular to the Surface
 Pressure Hulls and Canisters 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication,
Pressure Hulls and Canisters 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication,
Saab Seaeye Cougar XT Compact
 The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
-SWEPT AWAY- Description & Overview. VEX Classroom Competition Swept Away
 -SWEPT AWAY- Description & Overview Swept Away is a head-to-head robotics competition designed and scaled to be run in a classroom environment by a single teacher. This game provides a challenge for designers
-SWEPT AWAY- Description & Overview Swept Away is a head-to-head robotics competition designed and scaled to be run in a classroom environment by a single teacher. This game provides a challenge for designers
-Round Down- Description & Overview. VEX Classroom Competition Round Down
 -Round Down- Description & Overview Round Down is a head-to-head robotics competition designed and scaled to be run in a classroom environment by a single teacher. This game provides a challenge for designers
-Round Down- Description & Overview Round Down is a head-to-head robotics competition designed and scaled to be run in a classroom environment by a single teacher. This game provides a challenge for designers
Figure 1: Level Pitch Positive Pitch Angle Negative Pitch Angle. Trim: The rotation of a vehicle from side to side. See Figure 2.
 Buoyancy, Stability, and Ballast 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication,
Buoyancy, Stability, and Ballast 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication,
ISE Subsea Tools and Toolsleds
 1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
The below identified patent application is available for licensing. Requests for information should be addressed to:
 DEPARTMENT OF THE NAVY NAVAL UNDERSEA WARFARE CENTER DIVISION NEWPORT OFFICE OF COUNSEL PHONE: (401) 832-3653 FAX: (401) 832-4432 NEWPORT DSN: 432-3653 Attorney Docket No. 96811 Date: 14 May 2008 The below
DEPARTMENT OF THE NAVY NAVAL UNDERSEA WARFARE CENTER DIVISION NEWPORT OFFICE OF COUNSEL PHONE: (401) 832-3653 FAX: (401) 832-4432 NEWPORT DSN: 432-3653 Attorney Docket No. 96811 Date: 14 May 2008 The below
Remotely Operated Underwater Vehicle (ROV) 25% Report
 25% Report") EML 4551 Senior Design Project A B.S. THESIS PREPARED IN PARTIAL FULFILLMENT OF THE REQUIREMENT FOR THE DEGREE OF BACHELOR OF SCIENCE IN MECHANICAL ENGINEERING Remotely Operated Underwater Vehicle (ROV)
EML 4551 Senior Design Project A B.S. THESIS PREPARED IN PARTIAL FULFILLMENT OF THE REQUIREMENT FOR THE DEGREE OF BACHELOR OF SCIENCE IN MECHANICAL ENGINEERING Remotely Operated Underwater Vehicle (ROV)
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
FLOWMETERING STORAGE TANKS FROM THE INSIDE
 FLOWMETERING STORAGE TANKS FROM THE INSIDE Peter Duzevich 1, David Barry 2 1 Commercial Diver, Ass. Project Manager, Rope Access Technician 4 Helsal Crt. Coomera, QLD 4209 Ph: (07)55019505 Fax: (07)55019506
FLOWMETERING STORAGE TANKS FROM THE INSIDE Peter Duzevich 1, David Barry 2 1 Commercial Diver, Ass. Project Manager, Rope Access Technician 4 Helsal Crt. Coomera, QLD 4209 Ph: (07)55019505 Fax: (07)55019506
SEADUCER BOATS GAS MONO COME VISIT US ON THE WEB AT
 SEADUCER BOATS GAS MONO COME VISIT US ON THE WEB AT WWW.SEADUCERBOATS.COM 1 - Pkg. Of 440 push rod ends 1 - Pkg. of solder-on rod ends 2 -water outlet fitting 1-1/4" prop nut 1 -.250" x 24" flex shaft
SEADUCER BOATS GAS MONO COME VISIT US ON THE WEB AT WWW.SEADUCERBOATS.COM 1 - Pkg. Of 440 push rod ends 1 - Pkg. of solder-on rod ends 2 -water outlet fitting 1-1/4" prop nut 1 -.250" x 24" flex shaft
Graham High School The Fighting Falcon
 Graham High School The Fighting Falcon Skyler Gist, Sixth Grade David Major, Senior Stephen Major, Senior Stephen Persinger, Junior Chad Rockey, Senior Anthony Ward, Senior Instructor: Mrs. Rose Table
Graham High School The Fighting Falcon Skyler Gist, Sixth Grade David Major, Senior Stephen Major, Senior Stephen Persinger, Junior Chad Rockey, Senior Anthony Ward, Senior Instructor: Mrs. Rose Table
Challenges in Ship Design to Maintain Thrusters inside Ship
 DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Thrusters Challenges in Ship Design to Maintain Thrusters inside Ship Tom Nylund and Timo Rintala Beacon Finland 1 DP Conference - Challenges in Ship Design
DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Thrusters Challenges in Ship Design to Maintain Thrusters inside Ship Tom Nylund and Timo Rintala Beacon Finland 1 DP Conference - Challenges in Ship Design
Combining Robot Form and Behavior: Designing a Winning Botball Robot
 Combining Robot Form and Behavior: Designing a Winning Botball Robot Helena Roberts-Mataric, Nastassja Carusetta, Karen Zhu, Richard Roberts, Maja Mataric South Pasadena High School mataric@usc.edu 1 Introduction
Combining Robot Form and Behavior: Designing a Winning Botball Robot Helena Roberts-Mataric, Nastassja Carusetta, Karen Zhu, Richard Roberts, Maja Mataric South Pasadena High School mataric@usc.edu 1 Introduction
Underwater Robotics: Ocean Invaders The Monterey Bay Aquarium/Marine Advanced Technology Education (MATE) Center s
 Center s") Underwater Robotics: Ocean Invaders The Monterey Bay Aquarium/Marine Advanced Technology Education (MATE) Center s 5 th Annual Remotely Operated Vehicle Contest Monterey Peninsula College April 16, 2005
Underwater Robotics: Ocean Invaders The Monterey Bay Aquarium/Marine Advanced Technology Education (MATE) Center s 5 th Annual Remotely Operated Vehicle Contest Monterey Peninsula College April 16, 2005
Job Safety Analysis. Macau PuiChing Middle School Ranger - Delphinus MATE ROV 2016
 Job Safety Analysis Ranger - Delphinus MATE ROV 2016 Job safety analysis and control measures Prevention is better than cure, so prior to starting any task, evaluate the potential hazards and take the
Job Safety Analysis Ranger - Delphinus MATE ROV 2016 Job safety analysis and control measures Prevention is better than cure, so prior to starting any task, evaluate the potential hazards and take the
Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities.
 Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities. Background & Research Question There are many different styles and categories when
Millennial Walker A multi-functional, elderly assistance walker with improved posture, comfort, and folding capabilities. Background & Research Question There are many different styles and categories when
RANGER PROP BUILDING INSTRUCTIONS & PHOTOS
 RANGER PROP BUILDING INSTRUCTIONS & PHOTOS Science under the ice Ice sheet At the international competition, the science under the ice product demonstration will take place under an actual sheet of ice.
RANGER PROP BUILDING INSTRUCTIONS & PHOTOS Science under the ice Ice sheet At the international competition, the science under the ice product demonstration will take place under an actual sheet of ice.
NOTICE. The above identified patent application is available for licensing. Requests for information should be addressed to:
 Serial Number 09/113.010 Filing Date 26 June 1998 Inventor Daniel M. Glenning Michael Visich NOTICE The above identified patent application is available for licensing. Requests for information should be
Serial Number 09/113.010 Filing Date 26 June 1998 Inventor Daniel M. Glenning Michael Visich NOTICE The above identified patent application is available for licensing. Requests for information should be
Planning and general precautions ithrust Tunnel Systems installations.
 Version 1.0 This recommendation will go through the different factors to consider when choosing where and how to fit thruster tunnels in a boat. Some of these recommendations might be difficult, or even
Version 1.0 This recommendation will go through the different factors to consider when choosing where and how to fit thruster tunnels in a boat. Some of these recommendations might be difficult, or even
Introduction to Robotics for 3D Additive Construction
 Introduction to Robotics for 3D Additive Construction Brian Wilcox, Manager, Space Robotics Technology Jet Propulsion Laboratory, California Institute of Technology 24 Aug 20105 Robotics for 3D Additive
Introduction to Robotics for 3D Additive Construction Brian Wilcox, Manager, Space Robotics Technology Jet Propulsion Laboratory, California Institute of Technology 24 Aug 20105 Robotics for 3D Additive
Underwater Blanking Tools
 Underwater Blanking Underwater Blanking Tools Miko Marine has been in the business of underwater blanking since 1997. Miko offers class-qualified tools for the temporary sealing of openings below the waterline,
Underwater Blanking Underwater Blanking Tools Miko Marine has been in the business of underwater blanking since 1997. Miko offers class-qualified tools for the temporary sealing of openings below the waterline,
Pressure Dump Valve Service Kit for Series 3000 Units
 Instruction Sheet Pressure Dump Valve Service Kit for Series 000 Units. Overview The Nordson pressure dump valve is used to relieve hydraulic pressure instantly in Series 00, 400, 500, and 700 applicator
Instruction Sheet Pressure Dump Valve Service Kit for Series 000 Units. Overview The Nordson pressure dump valve is used to relieve hydraulic pressure instantly in Series 00, 400, 500, and 700 applicator
S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed.
 S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed. - Operating depth 300 m (500 m optional) - Cruising speed up to 4 knots
S u p e r G N O M P R O The new line of GNOM ROVs for professional uses. The wide range of the additional equipment can be installed. - Operating depth 300 m (500 m optional) - Cruising speed up to 4 knots
The Aquaholics 2014 Technical Report Cape Henlopen High School Lewes, DE
 The Aquaholics 2014 Technical Report Cape Henlopen High School Lewes, DE Team Roster Mentors: William Geppert Les Proctor Tyler Rommel Name Position Angela Carroll CEO, Team Captain Graham Smith Pilot,
The Aquaholics 2014 Technical Report Cape Henlopen High School Lewes, DE Team Roster Mentors: William Geppert Les Proctor Tyler Rommel Name Position Angela Carroll CEO, Team Captain Graham Smith Pilot,
Underwater Blanking Tools. Miko Plaster. Tanker Kit. Sea Chest Blanking. Pipe Plugs
 Underwater Blanking Underwater Blanking Tools Miko Marine has been in the business of underwater blanking since 1997. Miko offers class-qualified tools for the temporary sealing of openings below the waterline,
Underwater Blanking Underwater Blanking Tools Miko Marine has been in the business of underwater blanking since 1997. Miko offers class-qualified tools for the temporary sealing of openings below the waterline,
It allows you to. is the Best Option. More information at
 Document - 17AIO Launch and Retrieve by yourself without getting your partner wet Copyright C Release & Retrieve Boat Latch Pty Ltd, 2016 and "L-&-R" is a Trademark of Release & Retrieve Boat Latch Pty
Document - 17AIO Launch and Retrieve by yourself without getting your partner wet Copyright C Release & Retrieve Boat Latch Pty Ltd, 2016 and "L-&-R" is a Trademark of Release & Retrieve Boat Latch Pty
Building a Wind Tunnel
 Technical Report TR-5 Building a Wind Tunnel Estes Industries 1963 These reports are published as a service to its customers by Estes Industries, Inc., Box 227, Penrose, Colorado 81240 Building a Wind
Technical Report TR-5 Building a Wind Tunnel Estes Industries 1963 These reports are published as a service to its customers by Estes Industries, Inc., Box 227, Penrose, Colorado 81240 Building a Wind
The Deep Dive Project
 The Deep Dive Project Company Members First bottom row Santiago Mendez (Left) Nicolas Leos (Middle) Rosario Moreno (Right) Back row Justice Cortez Alyssa Vega Enrique Esteves Kevin Acevedo Alejandro Avila
The Deep Dive Project Company Members First bottom row Santiago Mendez (Left) Nicolas Leos (Middle) Rosario Moreno (Right) Back row Justice Cortez Alyssa Vega Enrique Esteves Kevin Acevedo Alejandro Avila
Give Wings to Imagination
 Give Wings to Imagination Water rocket uses water as a propellant. PRINCIPLE It is based on the NEWTON S THIRD LAW OF MOTION. For a simple model, water rocket consists of a bottle having water above
Give Wings to Imagination Water rocket uses water as a propellant. PRINCIPLE It is based on the NEWTON S THIRD LAW OF MOTION. For a simple model, water rocket consists of a bottle having water above
EML 4905 Senior Design Project
 EML 4905 Senior Design Project A B.S. THESIS PREPARED IN PARTIAL FULFILLMENT OF THE REQUIREMENT FOR THE DEGREE OF BACHELOR OF SCIENCE IN MECHANICAL ENGINEERING Underwater R.O.V.er 25% Report Ryan Wright
EML 4905 Senior Design Project A B.S. THESIS PREPARED IN PARTIAL FULFILLMENT OF THE REQUIREMENT FOR THE DEGREE OF BACHELOR OF SCIENCE IN MECHANICAL ENGINEERING Underwater R.O.V.er 25% Report Ryan Wright
Field Setup. Match Scoring
 Vex Competition Tuesday March 13, 2018 Biscuit in the Basket is a head-to-head robotics competition designed and scaled to be run in a classroom environment by a single teacher. This game provides a challenge
Vex Competition Tuesday March 13, 2018 Biscuit in the Basket is a head-to-head robotics competition designed and scaled to be run in a classroom environment by a single teacher. This game provides a challenge
Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site
 Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site Prof. Richard Voyles Guangying Jiang Purdue University Collaborative Robotics Lab Purdue Robotics Accelerator U.S. DOE
Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site Prof. Richard Voyles Guangying Jiang Purdue University Collaborative Robotics Lab Purdue Robotics Accelerator U.S. DOE
Agilent Wedge for Probing High-Pitch ICs A Hands-Free Solution for Probing Fine-Pitch ICs
 Agilent Wedge for Probing High-Pitch ICs A Hands-Free Solution for Probing Fine-Pitch ICs Application Note Making reliable, nondestructive connections to 0.5 and 0.65 mm components Table of Contents 2
Agilent Wedge for Probing High-Pitch ICs A Hands-Free Solution for Probing Fine-Pitch ICs Application Note Making reliable, nondestructive connections to 0.5 and 0.65 mm components Table of Contents 2
Check with local zoning official for property line distance requirements.
 RESIDENTIAL POOL PLAN SUBMITTAL GUIDELINES The following guidelines are intended to assist municipal residents with the permit acquisition process with regard to pools, spas and hot tubs for single family
RESIDENTIAL POOL PLAN SUBMITTAL GUIDELINES The following guidelines are intended to assist municipal residents with the permit acquisition process with regard to pools, spas and hot tubs for single family
We hope you ll enjoy the Drifter as much as we have! Scott DeTray Model Aero Specifications:
 We are excited to bring you the Drifter RC airboat. You re probably thinking it doesn t fly so what is Model Aero thinking??? We have always liked RC vehicles of all types and have had a fondness for airboats
We are excited to bring you the Drifter RC airboat. You re probably thinking it doesn t fly so what is Model Aero thinking??? We have always liked RC vehicles of all types and have had a fondness for airboats
Pressure Dump Valve Service Kit for Series 2300 Units
 Instruction Sheet Pressure Dump Valve Service Kit for Series 00 Units. Overview The Nordson pressure dump valve is used to relieve hydraulic pressure instantly in Series 00 applicator tanks when the unit
Instruction Sheet Pressure Dump Valve Service Kit for Series 00 Units. Overview The Nordson pressure dump valve is used to relieve hydraulic pressure instantly in Series 00 applicator tanks when the unit
Instruction Manual. Features. Specification: Length: 730mm Width: 500mm Height: 1000mm Sail Area: 0.15m 2. Weight: 692g (w/o battery & receiver)
") AN UNBELIEVABLE SPEED MACHINE Instruction Manual Features Specification: Length: 730mm Width: 500mm Height: 1000mm Sail Area: 0.15m 2 Weight: 692g (w/o battery & receiver) Thank you for purchasing your
AN UNBELIEVABLE SPEED MACHINE Instruction Manual Features Specification: Length: 730mm Width: 500mm Height: 1000mm Sail Area: 0.15m 2 Weight: 692g (w/o battery & receiver) Thank you for purchasing your
(12) Patent Application Publication (10) Pub. No.: US 2008/ A1
 Patent Application Publication (10) Pub. No.: US 2008/ A1") (19) United States (12) Patent Application Publication (10) Pub. No.: US 2008/0066794 A1 Durfee US 2008 OO66794A1 (43) Pub. Date: Mar. 20, 2008 (54) (76) (21) (22) (60) AUTOMATIC HUNTING BLIND Inventor:
(19) United States (12) Patent Application Publication (10) Pub. No.: US 2008/0066794 A1 Durfee US 2008 OO66794A1 (43) Pub. Date: Mar. 20, 2008 (54) (76) (21) (22) (60) AUTOMATIC HUNTING BLIND Inventor:
CLIENT NAME: LOCATION: CALM BUOY INSPECTION:
 INSPECTOR REVIEWED INSPECTION OF CALM BUOY OVERALL PHOTO REVISION DESCRIPTION: Preliminary / Final Page: 1 TABLE OF CONTENT 1. MANAGEMENT SUMMARY... 3 1.1. SCOPE OF WORK:... 3 1.2. CORRECTIVE ACTIONS...
INSPECTOR REVIEWED INSPECTION OF CALM BUOY OVERALL PHOTO REVISION DESCRIPTION: Preliminary / Final Page: 1 TABLE OF CONTENT 1. MANAGEMENT SUMMARY... 3 1.1. SCOPE OF WORK:... 3 1.2. CORRECTIVE ACTIONS...
The Quarter Pounder A Vehicle to Launch Quarter Pound Payloads to Low Earth Orbit
 The Quarter Pounder A Vehicle to Launch Quarter Pound Payloads to Low Earth Orbit Ed LeBouthillier 1 Contents Introduction... 3 Requirements... 4 Orbital Altitudes... 4 Orbital Velocities... 4 Summary...4
The Quarter Pounder A Vehicle to Launch Quarter Pound Payloads to Low Earth Orbit Ed LeBouthillier 1 Contents Introduction... 3 Requirements... 4 Orbital Altitudes... 4 Orbital Velocities... 4 Summary...4
Barrel Assembly. Field Stripping
 WARNINGS: Carry out safety check before handling the weapon. The weapon is heavily oiled for shipping. Clean and lubricate before firing. These procedures given apply only to the US Ordnance QCB version.
WARNINGS: Carry out safety check before handling the weapon. The weapon is heavily oiled for shipping. Clean and lubricate before firing. These procedures given apply only to the US Ordnance QCB version.
Swept Away! (New for 2011) Middle School, High School, Post-Secondary
 Middle School, High School, Post-Secondary") Swept Away! (New for 2011) Middle School, High School, Post-Secondary Contest Description Swept Away is a head-to-head robotics competition designed to provide a challenge for designers of all experience
Swept Away! (New for 2011) Middle School, High School, Post-Secondary Contest Description Swept Away is a head-to-head robotics competition designed to provide a challenge for designers of all experience
Beavers are particularly adept at manipulating their
 Beavers are particularly adept at manipulating their environment to suit their needs. They instinctively build dams to raise water levels and increase the area covered by water. Beaver ponds provide security
Beavers are particularly adept at manipulating their environment to suit their needs. They instinctively build dams to raise water levels and increase the area covered by water. Beaver ponds provide security
Development of tether mooring type underwater robots: Anchor diver I and II
 Indian Journal of Geo-Marine Sciences Vol. 40(2), April 2011, pp. 181-190 Development of tether mooring type underwater robots: Anchor diver I and II Ya-Wen Huang 1, Koji Ueda 1, Kazuhiro Itoh 2, Yuki
Indian Journal of Geo-Marine Sciences Vol. 40(2), April 2011, pp. 181-190 Development of tether mooring type underwater robots: Anchor diver I and II Ya-Wen Huang 1, Koji Ueda 1, Kazuhiro Itoh 2, Yuki
Pneumatic Antenna Launcher mkii
 Pneumatic Antenna Launcher mkii By Bill Conkling nr4c July 2011 Background After several years of service, my old 'Spud Gun' antenna launcher has seen better days. It has been suffering from a leak in
Pneumatic Antenna Launcher mkii By Bill Conkling nr4c July 2011 Background After several years of service, my old 'Spud Gun' antenna launcher has seen better days. It has been suffering from a leak in
PROTOTYPE DEVELOPMENT FOR A LEAK-PREVENTIVE TOILET FLUSH SYSTEM AN MET SENIOR DESIGN (CAPSTONE) PROJECT
 PROJECT") Session 3548 PROTOTYPE DEVELOPMENT FOR A LEAK-PREVENTIVE TOILET FLUSH SYSTEM AN MET SENIOR DESIGN (CAPSTONE) PROJECT Cheng Y Lin, PhD, PE Department of Engineering Technology Old Dominion University Norfolk,
Session 3548 PROTOTYPE DEVELOPMENT FOR A LEAK-PREVENTIVE TOILET FLUSH SYSTEM AN MET SENIOR DESIGN (CAPSTONE) PROJECT Cheng Y Lin, PhD, PE Department of Engineering Technology Old Dominion University Norfolk,
R/C'ing the Revell 1/72 GATO Class Static Submarine Kit, Part-14. A Report to the Cabal:
 R/C'ing the Revell 1/72 GATO Class Static Submarine Kit, Part-14 A Report to the Cabal: I've invested over two weeks of continuous work to this project, and it's time to stick the WTC into the hull, install
R/C'ing the Revell 1/72 GATO Class Static Submarine Kit, Part-14 A Report to the Cabal: I've invested over two weeks of continuous work to this project, and it's time to stick the WTC into the hull, install
High Altitude Imaging Platform (HAIP). The electronics system must survive the launch
. The electronics system must survive the launch") 6.0 Canister Design The avionics canister houses all of the electronic components necessary to run the High Altitude Imaging Platform (HAIP). The electronics system must survive the launch of the rocket,
6.0 Canister Design The avionics canister houses all of the electronic components necessary to run the High Altitude Imaging Platform (HAIP). The electronics system must survive the launch of the rocket,
HORIZONTAL BLADDER TANK
 Balanced Pressure Proportioning System Reliable Foam System Requiring Only Water Power Perfect For Low Ceilings UL Listed, ASME, National Board Registered Bladder-UL162 Approved, High Tensile Pressure
Balanced Pressure Proportioning System Reliable Foam System Requiring Only Water Power Perfect For Low Ceilings UL Listed, ASME, National Board Registered Bladder-UL162 Approved, High Tensile Pressure
GOLFER. The Golf Putting Robot
 GOLFER The Golf Putting Robot Written By Wing Pan Yuen For EEL 5666 Intelligent Machines Design Laboratory December 05, 1999 Table of Contents Abstract Introduction Executive Summary Integrated System
GOLFER The Golf Putting Robot Written By Wing Pan Yuen For EEL 5666 Intelligent Machines Design Laboratory December 05, 1999 Table of Contents Abstract Introduction Executive Summary Integrated System
Design, Building and Teaching with a Hydrostatic and Buoyancy Apparatus
 Design, Building and Teaching with a Hydrostatic and Buoyancy Apparatus Mir M. Atiqullah and Norman Russell Southern Polytechnic State University Marietta, GA. ABSTRACT A typical Fluid Mechanics laboratory
Design, Building and Teaching with a Hydrostatic and Buoyancy Apparatus Mir M. Atiqullah and Norman Russell Southern Polytechnic State University Marietta, GA. ABSTRACT A typical Fluid Mechanics laboratory
Manuale d istruzioni User s Guide Manuel d utilisation Manual de instrucciones Manual de instruções Οδηγίες χρήσης INSTINCT
 Manuale d istruzioni User s Guide Manuel d utilisation Manual de instrucciones Manual de instruções Οδηγίες χρήσης INSTINCT POWERBAND SPEARGUN INSTINCT CAREFULLY READ THIS INSTRUCTION MANUAL BEFORE USE,
Manuale d istruzioni User s Guide Manuel d utilisation Manual de instrucciones Manual de instruções Οδηγίες χρήσης INSTINCT POWERBAND SPEARGUN INSTINCT CAREFULLY READ THIS INSTRUCTION MANUAL BEFORE USE,
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV SYSTEM
 TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
TECHNICAL BENEFITS OF CJS / RAISE HSP. Technical Advantages
 TECHNICAL BENEFITS OF CJS / RAISE HSP Technical Advantages The HSP is designed for low- to mid- volume applications at flow rates of 1 cubic meter to 30 c. m per day. The benefits are in the details. The
TECHNICAL BENEFITS OF CJS / RAISE HSP Technical Advantages The HSP is designed for low- to mid- volume applications at flow rates of 1 cubic meter to 30 c. m per day. The benefits are in the details. The
SABERINDO PACIF SABERINDO PACIFIC CIFIC SABERINDO PA. A Tyco International Company
 CIF A Tyco International Company 1 Foam Concentrate CIF 3% AFFF -UL Listed -UL Canada Listed 6% AFFF 6 parts AFFF concentrate to 94 parts water -UL Listed- Foam Liquid -UL Canada Listed 3% FLUOROPROTEIN
CIF A Tyco International Company 1 Foam Concentrate CIF 3% AFFF -UL Listed -UL Canada Listed 6% AFFF 6 parts AFFF concentrate to 94 parts water -UL Listed- Foam Liquid -UL Canada Listed 3% FLUOROPROTEIN
Engineering Fundamentals final project: Jerry Built
 1 Engineering Fundamentals final project: Jerry Built 25 April 2009 Ashley Gleaves Korey Hamilton Joel Sausman Jack Smodic The following team members have read and approved of this report: Ashley Gleaves,
1 Engineering Fundamentals final project: Jerry Built 25 April 2009 Ashley Gleaves Korey Hamilton Joel Sausman Jack Smodic The following team members have read and approved of this report: Ashley Gleaves,
Puffin Sport Assembly and User Information
 Puffin Sport Assembly and User Information ScanSport, Inc. / Pakboats Post Office Box 700 May Street Enfield, New Hampshire 03748 USA Phone: (888) 863-9500 (toll free) From outside the US: +1 (603) 632-9500
Puffin Sport Assembly and User Information ScanSport, Inc. / Pakboats Post Office Box 700 May Street Enfield, New Hampshire 03748 USA Phone: (888) 863-9500 (toll free) From outside the US: +1 (603) 632-9500
HANDBOOK. Squeeze Off Unit SOU 400. Please refer any queries to:
 HANDBOOK Squeeze Off Unit SOU 400 Please refer any queries to: Hy Ram Engineering Co Ltd Pelham Street Mansfield Nottinghamshire NG18 2EY Telephone No: (01623) 422982 Please note all queries should state
HANDBOOK Squeeze Off Unit SOU 400 Please refer any queries to: Hy Ram Engineering Co Ltd Pelham Street Mansfield Nottinghamshire NG18 2EY Telephone No: (01623) 422982 Please note all queries should state
Micro grippers HGPM/HGWM
 HGPM/HGWM Miniaturised and optimised for assembly tasks Versatile 2004/10 Subject to change Products 2004/2005 1 / 1 HGPM/HGWM Key features HGWM HGPM 1 2 3 4 1 2 3 4 System product for handling and assembly
HGPM/HGWM Miniaturised and optimised for assembly tasks Versatile 2004/10 Subject to change Products 2004/2005 1 / 1 HGPM/HGWM Key features HGWM HGPM 1 2 3 4 1 2 3 4 System product for handling and assembly
Moving On Kentucky Bluegrass High School Robotics Competition. Sponsored by Western Kentucky University Department of Engineering
 Moving On 2015 Kentucky Bluegrass High School Robotics Competition Sponsored by Western Kentucky University Department of Engineering Kickoff Meeting: September 11, 2015 Competition Day: November 7, 2015
Moving On 2015 Kentucky Bluegrass High School Robotics Competition Sponsored by Western Kentucky University Department of Engineering Kickoff Meeting: September 11, 2015 Competition Day: November 7, 2015
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane
 Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
RPSEA UDW Forum June 22 & 23, Secure Energy for America
 RPSEA UDW Forum June 22 & 23, 2010 Secure Energy for America PROJECT TEAM RPSEA Operator Advisory Committee Anadarko Chevron Shell ConocoPhillips Subcontractors IntecSea NOV CTES General Marine Contractors
RPSEA UDW Forum June 22 & 23, 2010 Secure Energy for America PROJECT TEAM RPSEA Operator Advisory Committee Anadarko Chevron Shell ConocoPhillips Subcontractors IntecSea NOV CTES General Marine Contractors
ESAIL D3.1.1 Requirement specifications of the tether test reels
 D3.1.1 Requirement specifications of the tether test reels Work Package: WP 3.1 Version: Version 1.0 Prepared by: DLR German Aerospace Center, Olaf Krömer, Roland Rosta Time: Bremen, May 30 th, 2011 Coordinating
D3.1.1 Requirement specifications of the tether test reels Work Package: WP 3.1 Version: Version 1.0 Prepared by: DLR German Aerospace Center, Olaf Krömer, Roland Rosta Time: Bremen, May 30 th, 2011 Coordinating
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS
 SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
Inventor Laurent Bissonnette NOTICE
 Serial No. 8.0 Filing Date 1 June 9 Inventor Laurent Bissonnette NOTICE The above identified patent application is available for licensing. Requests for information should be addressed to: OFFICE OF NAVAL
Serial No. 8.0 Filing Date 1 June 9 Inventor Laurent Bissonnette NOTICE The above identified patent application is available for licensing. Requests for information should be addressed to: OFFICE OF NAVAL
Fully Submersible Heavy Lift Vessel
 Fully Submersible Heavy Lift Vessel Arnbjorn Joensen Aberdeen Maritime Branch (28th January 2015) PRESENTATION Introduction to the Subsea Deployment Vessel Installation method Tank test video Potential
Fully Submersible Heavy Lift Vessel Arnbjorn Joensen Aberdeen Maritime Branch (28th January 2015) PRESENTATION Introduction to the Subsea Deployment Vessel Installation method Tank test video Potential
Item 404 Driving Piling
 Item Driving Piling 1. DESCRIPTION Drive piling. 2. EQUIPMENT 2.1. Driving Equipment. Use power hammers for driving piling with specified bearing resistance. Use power hammers that comply with Table 1.
Item Driving Piling 1. DESCRIPTION Drive piling. 2. EQUIPMENT 2.1. Driving Equipment. Use power hammers for driving piling with specified bearing resistance. Use power hammers that comply with Table 1.
THE C.A.R. SYSTEM OF GUNFIGHTING
 THE C.A.R. SYSTEM OF GUNFIGHTING A. It is a gun fighting technique, not a range application. - It is a strong, stable, and flexible platform for action. - It allows quick target acquisition and rapid fire
THE C.A.R. SYSTEM OF GUNFIGHTING A. It is a gun fighting technique, not a range application. - It is a strong, stable, and flexible platform for action. - It allows quick target acquisition and rapid fire
VERTICAL BLADDER TANK
 Balanced Pressure Proportioning System Reliable Foam System Requiring Only Water Power Perfect For Tight Spaces UL Listed, ASME, National Board Registered Bladder-UL162 Approved, High Tensile Pressure
Balanced Pressure Proportioning System Reliable Foam System Requiring Only Water Power Perfect For Tight Spaces UL Listed, ASME, National Board Registered Bladder-UL162 Approved, High Tensile Pressure
ICYNENE INSTALLATION INSTRUCTIONS
 ICYNENE LD-C-50 INSTALLATION INSTRUCTIONS ICYNENE LD-C-50 is a Low Density completely water blown open-cell spray foam insulation and air barrier material. Completely free of any HFC s and PBDE s, ICYNENE
ICYNENE LD-C-50 INSTALLATION INSTRUCTIONS ICYNENE LD-C-50 is a Low Density completely water blown open-cell spray foam insulation and air barrier material. Completely free of any HFC s and PBDE s, ICYNENE
FRONT BOLT ACTION ASSAULT SHOTGUN
 SPECIFICATIONS: CATEGORY........... IMPROVISED; NOTE: CAN BE MANUFACTURED COMMERCIALLY CALIBRE............ 410 TO 12 GAUGE; ADAPTABLE CAPACITY............... 8 TO 10 ROUNDS,.410 CAL. OPERATION..........
SPECIFICATIONS: CATEGORY........... IMPROVISED; NOTE: CAN BE MANUFACTURED COMMERCIALLY CALIBRE............ 410 TO 12 GAUGE; ADAPTABLE CAPACITY............... 8 TO 10 ROUNDS,.410 CAL. OPERATION..........
GUARDING OF FLOOR-TO-FLOOR WOOL PRESSES
 GUARDING OF FLOOR-TO-FLOOR WOOL PRESSES 1 NOTE The technical information in this book was current at the time of printing in 1984. While the guarding principles are still valid, the information does not
GUARDING OF FLOOR-TO-FLOOR WOOL PRESSES 1 NOTE The technical information in this book was current at the time of printing in 1984. While the guarding principles are still valid, the information does not
Revisions to the Regulations for Agility Trials
 Revisions to the Regulations for Agility Trials Effective January 2, 2018 Equipment changes may be done prior to January 2, 2018, but must be completed by January 2, 2018 This insert is issued as a supplement
Revisions to the Regulations for Agility Trials Effective January 2, 2018 Equipment changes may be done prior to January 2, 2018, but must be completed by January 2, 2018 This insert is issued as a supplement
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEMEMI SQA Unit Code H2B7 04 Assisting in the installation of compressed air equipment
 Assisting in the installation of compressed air equipment Overview This unit identifies the competences you need to assist in the installation of compressed air equipment and systems, in accordance with
Assisting in the installation of compressed air equipment Overview This unit identifies the competences you need to assist in the installation of compressed air equipment and systems, in accordance with
Sideshift SS230 Installation on a 2006 Bayliner 265SB
 The Sideshift SS230 was packaged very well and all parts were clearly labelled and documented. The overall quality seems far more durable than I expected... I was somewhat concerned that the unit may become
The Sideshift SS230 was packaged very well and all parts were clearly labelled and documented. The overall quality seems far more durable than I expected... I was somewhat concerned that the unit may become
Mount the actuator in the bracket provided and install a 24-foot EFTC cable to the actuator.
 . Mount the actuator in the bracket provided and install a 4-foot EFTC cable to the actuator. Route the cable through left stanchions,, and 4. Be sure that the cable does not contact any spring or push
. Mount the actuator in the bracket provided and install a 4-foot EFTC cable to the actuator. Route the cable through left stanchions,, and 4. Be sure that the cable does not contact any spring or push
IAC-04-IAA DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER
 IAC-04-IAA-3.8.2 DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER Bas Lansdorp, MSc Delft University of Technology, The Netherlands bas.lansdorp@lr.tudelft.nl Prof. ir. H.M.J.R. Soemers
IAC-04-IAA-3.8.2 DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER Bas Lansdorp, MSc Delft University of Technology, The Netherlands bas.lansdorp@lr.tudelft.nl Prof. ir. H.M.J.R. Soemers
Using PV Diagram Synchronized With the Valve Functioning to Increase the Efficiency on the Reciprocating Hermetic Compressors
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 21 Using PV Diagram Synchronized With the Valve Functioning to Increase the Efficiency on
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 21 Using PV Diagram Synchronized With the Valve Functioning to Increase the Efficiency on
Early evap monitors. Photo courtesy Toyota Motor Sales, U.S.A., Inc.; diagram courtesy University of Toyota
 Early evap monitors checked for leaks greater than.040 in. (1mm), but starting in model year 2000, the allowable leak was reduced to.020 in. (.5mm), which was phased in over several years. The reduced
Early evap monitors checked for leaks greater than.040 in. (1mm), but starting in model year 2000, the allowable leak was reduced to.020 in. (.5mm), which was phased in over several years. The reduced
Tether Tender. User Manual. Revision 1A. KCF Technologies, Inc. 336 South Fraser St., State College, PA
 Tether Tender User Manual Revision 1A KCF Technologies, Inc. 336 South Fraser St., State College, PA 16801 www.kcftech.com 814.867.4097 1. CONTENTS 1. Contents... 2 2. Introduction... 3 3. Care and Handling
Tether Tender User Manual Revision 1A KCF Technologies, Inc. 336 South Fraser St., State College, PA 16801 www.kcftech.com 814.867.4097 1. CONTENTS 1. Contents... 2 2. Introduction... 3 3. Care and Handling
Constitution Instructions
 Constitution Instructions This kit will build a 1:48 scale hull for the USS Constitution frigate. The kit contains the following parts. 1/8 deck with laser etched deck lines 1/8 railing Ribs Center keel
Constitution Instructions This kit will build a 1:48 scale hull for the USS Constitution frigate. The kit contains the following parts. 1/8 deck with laser etched deck lines 1/8 railing Ribs Center keel
UNIT D: MECHANICAL SYSTEMS
 UNIT D: MECHANICAL SYSTEMS SCIENCE 8 SCIENCE 8 UNIT D SECTION 1.0 1 MACHINES ARE TOOLS THAT HELP HUMANS DO WORK. SECTION 1.0 SCIENCE 8 UNIT D SECTION 1.0 2 1 SIMPLE MACHINES MEETING HUMAN NEEDS TOPIC 1.1
UNIT D: MECHANICAL SYSTEMS SCIENCE 8 SCIENCE 8 UNIT D SECTION 1.0 1 MACHINES ARE TOOLS THAT HELP HUMANS DO WORK. SECTION 1.0 SCIENCE 8 UNIT D SECTION 1.0 2 1 SIMPLE MACHINES MEETING HUMAN NEEDS TOPIC 1.1
Table of Contents. Career Overview... 4
 Table of Contents Career Overview.................................................. 4 Basic Lesson Plans Activity 1 Measuring... 6 Activity 2 Accuracy and Precision.... 14 Activity 3 Measurement Devices....
Table of Contents Career Overview.................................................. 4 Basic Lesson Plans Activity 1 Measuring... 6 Activity 2 Accuracy and Precision.... 14 Activity 3 Measurement Devices....
Creation of a Fallback Catch Method. Megan Berry Mechanical Engineering Senior MAE 490 (4 credits)
") Creation of a Fallback Catch Method Megan Berry Mechanical Engineering Senior MAE 490 (4 credits) Abstract In order that the Cornell Ranger remains autonomous during long distance record attempts and avoids
Creation of a Fallback Catch Method Megan Berry Mechanical Engineering Senior MAE 490 (4 credits) Abstract In order that the Cornell Ranger remains autonomous during long distance record attempts and avoids
PILOT PEDAL DRIVE INSTRUCTIONS
 PILOT PEDAL DRIVE INSTRUCTIONS TABLE OF CONTENTS 1. INTRODUCTION 2. IMPORTANT SAFETY AND OPERATING INFORMATION 3. EQUIPMENT 3.1 Items Supplied 3.2 Tools Required 4. ASSEMBLY OF THE PEDAL DRIVE 4.1 Installing
PILOT PEDAL DRIVE INSTRUCTIONS TABLE OF CONTENTS 1. INTRODUCTION 2. IMPORTANT SAFETY AND OPERATING INFORMATION 3. EQUIPMENT 3.1 Items Supplied 3.2 Tools Required 4. ASSEMBLY OF THE PEDAL DRIVE 4.1 Installing
WELL SCAVENGER. Versatile wellbore clean-up tool for the most demanding operations
 WELL SCAVENGER Versatile wellbore clean-up tool for the most demanding operations WELL SCAVENGER: A versatile wellbore cleanup tool for flowrestricted applications The inability to recover wellbore debris
WELL SCAVENGER Versatile wellbore clean-up tool for the most demanding operations WELL SCAVENGER: A versatile wellbore cleanup tool for flowrestricted applications The inability to recover wellbore debris
MODEL ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT
 MODEL 862-000-200 ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT DOCUMENT NO. 430-007H September 20, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875 BROADWAY
MODEL 862-000-200 ANALOG ALTIMETER USER'S MANUAL 330KHZ, 1000M DEPTH RATED 0.2 TO 100FT OPERATING RANGE ANALOG OUTPUT DOCUMENT NO. 430-007H September 20, 2005 S/N IMAGENEX TECHNOLOGY CORP. 209-1875 BROADWAY
BEST Generic Game Rules GMRK00001 Revision 4; October 2008
 GMRK00001 Revision 4; 1.0 Overview This is a youth oriented contest. The youth will gain the most if they do the work. Mentors and coaches are to provide guidance only and not to make parts, detail design,
GMRK00001 Revision 4; 1.0 Overview This is a youth oriented contest. The youth will gain the most if they do the work. Mentors and coaches are to provide guidance only and not to make parts, detail design,
E-trike Li Assembly Guide
 PREPARATION 1. Read this assembly manual BEFORE commencing assembly. 2. Carefully remove all the components and packaged hardware from the shipping boxes. 3. Unpack the contents of the large double box
PREPARATION 1. Read this assembly manual BEFORE commencing assembly. 2. Carefully remove all the components and packaged hardware from the shipping boxes. 3. Unpack the contents of the large double box
The 2 nd Annual MATE New England Regional ROV Competition. May 8 th, 2004 University of Rhode Island
 The 2 nd Annual MATE New England Regional ROV Competition May 8 th, 2004 University of Rhode Island Major Sponsors The MATE (Marine Advanced Technology Education) Center Rhode Island Sea Grant URI Robotics
The 2 nd Annual MATE New England Regional ROV Competition May 8 th, 2004 University of Rhode Island Major Sponsors The MATE (Marine Advanced Technology Education) Center Rhode Island Sea Grant URI Robotics
THE KRAKEN. The Scuba Diving Wheel Chair TEAM 14: Phil Iatridis Jason MacNeil Mike MacIsaac Mohamed Abdelhady PROJECT SUPERVISOR: Dr.
 TEAM 14: THE KRAKEN The Scuba Diving Wheel Chair Phil Iatridis Jason MacNeil Mike MacIsaac Mohamed Abdelhady PROJECT SUPERVISOR: Dr. Ismet Ugursal 1 Project Background Project Goal: Scuba Diving with T1
TEAM 14: THE KRAKEN The Scuba Diving Wheel Chair Phil Iatridis Jason MacNeil Mike MacIsaac Mohamed Abdelhady PROJECT SUPERVISOR: Dr. Ismet Ugursal 1 Project Background Project Goal: Scuba Diving with T1
Building Instructions ME 163 B 1a M 1:5 Turbine
 Building Instructions ME 163 B 1a M 1:5 Turbine Thank you for choosing our kit of the Me-163B. We ask you to read the instruction once in advance before building this kit in order to avoid mistakes. Make
Building Instructions ME 163 B 1a M 1:5 Turbine Thank you for choosing our kit of the Me-163B. We ask you to read the instruction once in advance before building this kit in order to avoid mistakes. Make
Blazer Marine, Whiplash Sport 40
 Blazer Marine, Whiplash Sport 40 Thank you for choosing to build the Whiplash 40. We have spent over 12 years perfecting this design, and finally we are making it available to the world. We are excited
Blazer Marine, Whiplash Sport 40 Thank you for choosing to build the Whiplash 40. We have spent over 12 years perfecting this design, and finally we are making it available to the world. We are excited