Mecánica de Sistemas Multicuerpo:
|
|
|
- Gwendolyn Leonard
- 6 years ago
- Views:
Transcription




1 Universidad Pública de Navarra 12 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Mecánica de Sistemas Multicuerpo: Análisis de la Silla de Ruedas Triesférica y Dinámica de la Marcha de Sistemas Bípedos Josep Maria Font Llagunes josep.m.font@upc.edu Departamento de Ingeniería Mecánica McGill University
2 Presentation Contents Wheelchair Kinematics Wheelchairs with Conventional Wheels Wheelchair with Omnidirectional Wheels Mechanics of Wheelchairs Introduction to Wheelchair Dynamics Introduction to Dynamic Walking Dynamic Model of the Walking System Decomposition of the Impulsive Motion Biomechanics of Bipedal Systems Numerical Results and Discussion

3 Degrees of Freedom of a Wheelchair Wheelchair Kinematics

4 Control of a Wheelchair with Differential Steering Wheelchair Kinematics

5 Control of a Wheelchair with Differential Steering Wheelchair Kinematics

6 Control of a Wheelchair with Direct Steering Wheelchair Kinematics

7 Kinematics in Wheelchair Control Wheelchair Kinematics
8 Presentation Contents Wheelchair Kinematics Wheelchairs with Conventional Wheels Wheelchair with Omnidirectional Wheels Mechanics of Wheelchairs Introduction to Wheelchair Dynamics Introduction to Dynamic Walking Dynamic Model of the Walking System Decomposition of the Impulsive Motion Biomechanics of Bipedal Systems Numerical Results and Discussion

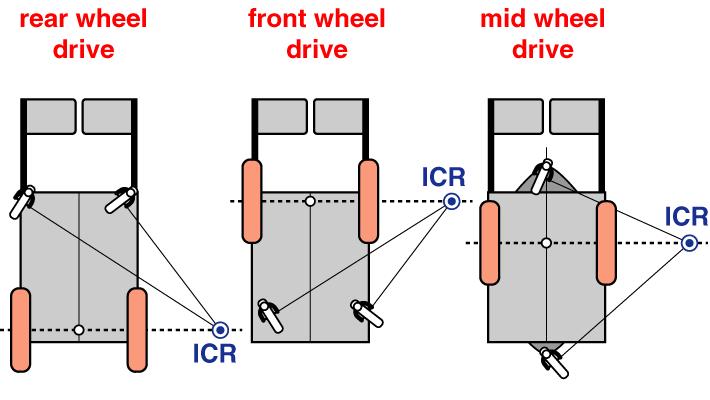
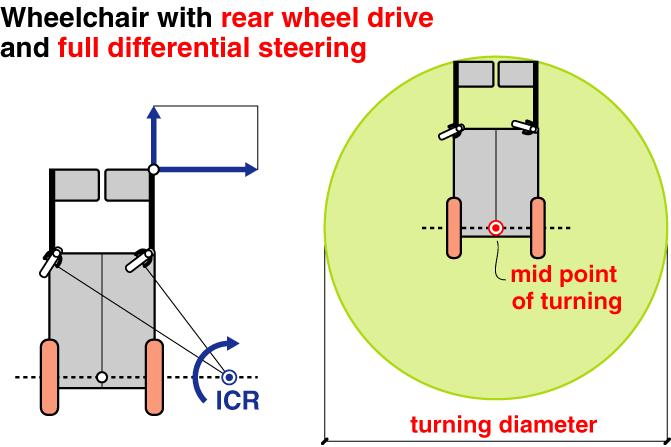
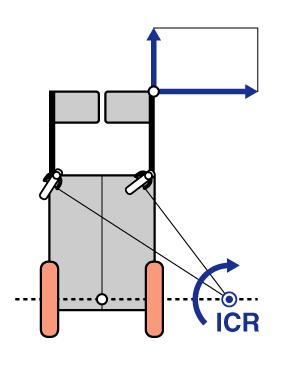
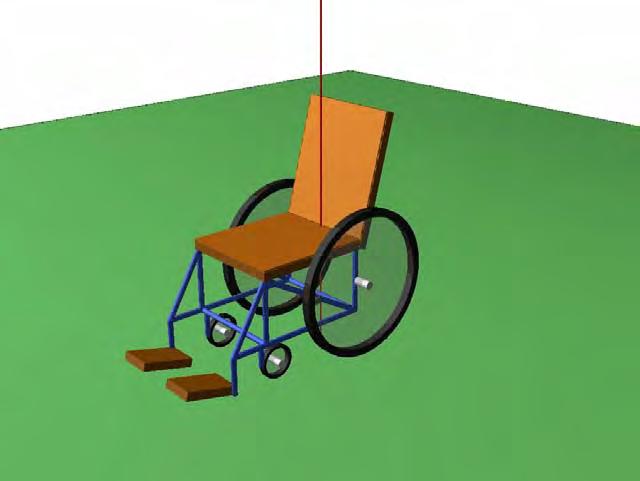
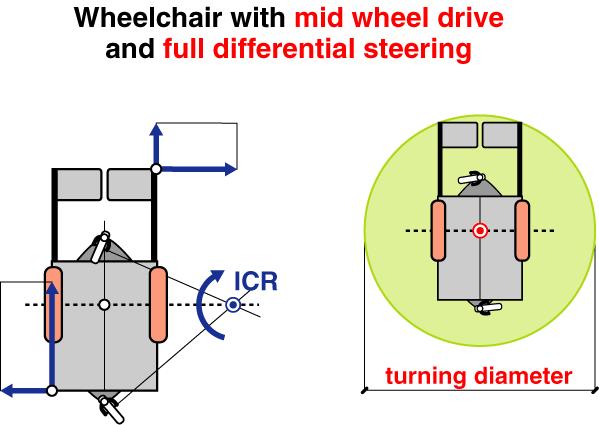
9 Wheelchair with Differential Steering Wheelchairs with Conventional Wheels

10 Control of a Wheelchair with Differential Steering Wheelchairs with Conventional Wheels

11 Wheelchairs with Conventional Wheels

12 Wheelchairs with Conventional Wheels

13 Wheelchairs with Conventional Wheels

14 Wheelchairs with Conventional Wheels

15 Wheelchairs with Conventional Wheels


16 Wheelchairs with Conventional Wheels

17 Wheelchair with Tricycle Steering Wheelchairs with Conventional Wheels


18 Tricycle Wheelchair with Steering-Driving Wheel Wheelchairs with Conventional Wheels

19 Tricycle Wheelchair with Steering-Driving Wheel Wheelchairs with Conventional Wheels

20 Kinematics of a Tricycle Wheelchair Wheelchairs with Conventional Wheels

21 Control of a Tricycle Wheelchair Wheelchairs with Conventional Wheels
22 Presentation Contents Wheelchair Kinematics Wheelchairs with Conventional Wheels Wheelchair with Omnidirectional Wheels Mechanics of Wheelchairs Introduction to Wheelchair Dynamics Introduction to Dynamic Walking Dynamic Model of the Walking System Decomposition of the Impulsive Motion Biomechanics of Bipedal Systems Numerical Results and Discussion

23 Mobility of the Centre of the Wheel Wheelchairs with Omnidirectional Wheels

24 Omnidirectional Wheel with Rollers at 45º Wheelchairs with Omnidirectional Wheels


25 Omnidirectional Wheel with Rollers at 90º Wheelchairs with Omnidirectional Wheels

26 3-DOF Platform with 3 Omnidirectional Wheels Wheelchairs with Omnidirectional Wheels

27 Omnidirectional Wheel with Spherical Rollers Wheelchairs with Omnidirectional Wheels

28 Omnidirectional Wheel with Spherical Rollers Wheelchairs with Omnidirectional Wheels

29 Wheelchairs with Omnidirectional Wheels

30 Wheelchairs with Omnidirectional Wheels

31 LONGITUDINAL DOF Wheelchairs with Omnidirectional Wheels

32 Wheelchairs with Omnidirectional Wheels

33 TRANSVERSAL DOF Wheelchairs with Omnidirectional Wheels

34 Wheelchairs with Omnidirectional Wheels

35 ROTATIONAL DOF Wheelchairs with Omnidirectional Wheels

36 Wheelchairs with Omnidirectional Wheels


37 Wheelchair with 3 Omnidirectional Wheels Wheelchairs with Omnidirectional Wheels

38 Wheelchair with 3 Omnidirectional Wheels Wheelchairs with Omnidirectional Wheels

39 Wheelchair Motion Modes Wheelchairs with Omnidirectional Wheels

40 Control of the Motion Modes Wheelchairs with Omnidirectional Wheels

41 Wheelchairs with Omnidirectional Wheels




42 Longitudinal motion Transverse motion Rotation General motion Wheelchairs with Omnidirectional Wheels
43 Presentation Contents Wheelchair Kinematics Wheelchairs with Conventional Wheels Wheelchair with Omnidirectional Wheels Mechanics of Wheelchairs Introduction to Wheelchair Dynamics Introduction to Dynamic Walking Dynamic Model of the Walking System Decomposition of the Impulsive Motion Biomechanics of Bipedal Systems Numerical Results and Discussion

44 Equations of Motion: Method of Virtual Work Introduction to Wheelchair Dynamics

45 Introduction to Wheelchair Dynamics

46 Introduction to Wheelchair Dynamics

47 Use of Omnidirectional Wheels. Conclusions Concluding Remarks


48 Universidad Pública de Navarra 12 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Effects of Mass Distribution and Configuration on the Energetic Losses at Impacts of Bipedal Walking Systems Josep Maria Font 1,2 and József Kövecses 1 1: Department of Mechanical Engineering and Centre for Intelligent Machines McGill University, Montréal, Canada 2: Department of Mechanical Engineering Universitat Politècnica de Catalunya, Barcelona, Spain
49 Presentation Contents Wheelchair Kinematics Wheelchairs with Conventional Wheels Wheelchair with Omnidirectional Wheels Mechanics of Wheelchairs Introduction to Wheelchair Dynamics Introduction to Dynamic Walking Dynamic Model of the Walking System Decomposition of the Impulsive Motion Biomechanics of Bipedal Systems Numerical Results and Discussion

50 Dynamic Walking or Limit Cycle Walking Dynamic Walking models are used to increase the understanding of the principles underlying bipedal locomotion. Starting point: Passive Dynamic Walking [McGeer 1990] Passive walker with knees [Nagoya Institute of Technology] Introduction to Dynamic Walking

51 Dynamic Walking or Limit Cycle Walking Dynamic Walking models are used to increase the understanding of the principles underlying bipedal locomotion. Starting point: Passive Dynamic Walking [McGeer 1990] Passive Walking resembles Human Walking [Nagoya Institute of Technology] Introduction to Dynamic Walking
, Human-like motion, Energetically efficient.")
52 Dynamic Walking or Limit Cycle Walking Actuated Dynamic Walkers have been recently developed (e.g., robot Flame developed at TU Delft). Walk on level ground, Orbitally stable (limit cycle), Human-like motion, Energetically efficient. Robot Flame [TU Delft] Introduction to Dynamic Walking
53 Presentation Contents Wheelchair Kinematics Wheelchairs with Conventional Wheels Wheelchair with Omnidirectional Wheels Mechanics of Wheelchairs Introduction to Wheelchair Dynamics Introduction to Dynamic Walking Dynamic Model of the Walking System Decomposition of the Impulsive Motion Biomechanics of Bipedal Systems Numerical Results and Discussion
54 Phases of the Walking Motion Single-support phase (Finite Motion) Heel Strike (Impulsive Motion) Dynamic Model of the Walking System
55 Phases of the Walking Motion Single-support phase (Finite Motion) Heel Strike (Impulsive Motion) ( ) ( ) ( ) Mqq + cqq + uq= f + Aλ AS q = 0 T, A S S Bilateral constraints Dynamic Model of the Walking System
56 Phases of the Walking Motion Single-support phase (Finite Motion) Heel Strike (Impulsive Motion) ( ) ( ) ( ) Mqq + cqq + uq= f + Aλ AS q = 0 T, A S S Bilateral constraints q T + + AI q + = v S S n T ( ) I λ I = M q q = A = Bq 0 Impulsive constraints Dynamic Model of the Walking System
.")
57 Phases of the Walking Motion Single-support phase (Finite Motion) Heel Strike (Impulsive Motion) ( ) ( ) ( ) Mqq + cqq + uq= f + Aλ AS q = 0 T, A S S Bilateral constraints Main cause of energy loss. Topology transition (some constraints are added and other become passive). Dynamic Model of the Walking System

58 Compass-Gait Biped with Upper Body l = 0.8 m l T = 0.4 m a = b = 0.4 m m B = 30 kg µ = 2m m H Lower body mass distribution m µ T = m T H Upper body mass distribution Generalized coordinates: q = T Kinetic energy: T ( qq, ) = ( ) Dynamic Model of the Walking System 1 q M q q 2 [ q1, q2, q3, q4, q5] T
59 Presentation Contents Wheelchair Kinematics Wheelchairs with Conventional Wheels Wheelchair with Omnidirectional Wheels Mechanics of Wheelchairs Introduction to Wheelchair Dynamics Introduction to Dynamic Walking Dynamic Model of the Walking System Decomposition of the Impulsive Motion Biomechanics of Bipedal Systems Numerical Results and Discussion
 A I : constraint Jacobian matrix.")
 ( ) ( ) ( ) 1 0 lcos q3 lcos q4 q3 lcos q4 q3 0 = 0 1 lsin q3 lsin q4 q3 lsin")
60 Heel Strike Dynamics Impulse-momentum level dynamic equations: q T + + T ( ) I λ I = M q q = A Impulsive constraints: AI q + = 0 (defines post-impact kinematic condition) A I : constraint Jacobian matrix. This matrix has different representations depending on which foot collides the ground. A A R L = ( ) ( ) ( ) ( ) 1 0 lcos q3 lcos q4 q3 lcos q4 q3 0 = 0 1 lsin q3 lsin q4 q3 lsin q4 q3 0 Decomposition of the Impulsive Motion
61 Decomposition of the Dynamic Equations The tangent space of the walking system can be decomposed to two subspaces mutually orthogonal with respect to the mass metric of the system [Kövecses 2003] This is achieved based on the following projection operators T ( ) 1 P = M A A M A A 1 T 1 c I I I I T ( ) 1 P = I M A A M A A 1 T 1 a I I I I Space of Constrained Motion (SCM) Space of Admissible Motion (SAM) The generalized velocities and impulses can be decoupled as q=pq + Pq=v + v c a c a f=pf+ Pf=f+ f T T c a c a Decomposition of the Impulsive Motion
62 Decomposition of the Dynamic Equations This gives a complete decoupling of the dynamic equations + Tc = + T M( vc vc ) = AI λ I vc + Ta = = v a + ( a a) M v v 0 Space of Constrained Motion (SCM) Space of Admissible Motion (SAM) + Solution: c = v 0 and v a = v a q = va = Pq a and the kinetic energy of the system 1 T 1 T T = T + T = v Mv + v Mv 2 2 c a c c a a Decomposition of the Impulsive Motion
63 Kinetic Energy Decomposition at the Pre-Impact Time 1 ( ) T 1 ( ) T T = T + T = v Mv + v Mv 2 2 c a c c a a Kinetic Energy of Constrained Motion LOST at Heel Strike Kinetic Energy of Admissible Motion STAYS in the system Useful tool to analyze energetic losses at heel strike and gain insight into the behaviour of dynamic walkers at impact. Energy loss per unit distance: 1 T T ( q ) Pc MPcq Tc ξ 2 L = = L 2lsin q S 3 Decomposition of the Impulsive Motion
64 Presentation Contents Wheelchair Kinematics Wheelchairs with Conventional Wheels Wheelchair with Omnidirectional Wheels Mechanics of Wheelchairs Introduction to Wheelchair Dynamics Introduction to Dynamic Walking Dynamic Model of the Walking System Decomposition of the Impulsive Motion Biomechanics of Bipedal Systems Numerical Results and Discussion

65 Simulation Results Goal: Analyze the effect of the body configuration and mass distribution on the dynamics of heel strike. Results and Discussion






66 Effects of the Lower Body on the Foot Separation Post-impact vel. v + S n (m/s) Concentrating the mass of the lower body at the hip increases the range of angles for which the trailing foot passively lifts up. Results and Discussion





67 Effects of the Lower Body on the Kinetic Energy Decomposition Kinetic Energy T c Kinetic Energy T a Concentrating the mass of the lower body at the legs reduces the energy loss at impact. A low impact angle q 4 reduces the kinetic energy loss (for a given mass distribution). Results and Discussion



 reduces the energy loss per")
68 Effects of the Lower Body on the Cost of Transport Cost of transport ξ L (J/m) Concentrating the mass of the lower body at the legs reduces the energy loss per unit distance. A low impact angle q 4 (small steps) reduces the energy loss per unit distance. Results and Discussion

 Concentrating")


69 Effects of the Upper Body on the Foot Separation Post-impact vel. v + S n (m/s) Concentrating the mass of the upper body at the hip increases the post-impact normal velocity of the trailing foot. Results and Discussion




 improves the")

70 Effects of the Upper Body on the Kinetic Energy Decomposition Kinetic Energy T c Kinetic Energy T a Concentrating the mass of the upper body at the top reduces the kinetic energy loss. A torso leaning forward (q 5 =0) improves the efficiency of the impact (for a given mass distribution). Results and Discussion
71 Conclusions We presented a Lagrangian formulation applicable to the study of the impulsive dynamics of heel strike. We introduced a decomposition of the dynamic equations and the kinetic energy to the spaces of constrained and admissible motions. This is useful to analyze the kinetic energy redistribution and the velocity change at heel strike. A low inter-leg angle at heel strike and a torso leaning forward reduce the energetic consumption per unit distance due to impacts. Conclusions
72 Universidad Pública de Navarra 12 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Mecánica de Sistemas Multicuerpo: Análisis de la Silla de Ruedas Triesférica y Dinámica de la Marcha de Sistemas Bípedos Josep Maria Font Llagunes josep.m.font@upc.edu Departamento de Ingeniería Mecánica McGill University
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING
 OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
OPTIMAL TRAJECTORY GENERATION OF COMPASS-GAIT BIPED BASED ON PASSIVE DYNAMIC WALKING Minseung Kim Dept. of Computer Science Illinois Institute of Technology 3201 S. State St. Box 2082 Chicago IL 60616
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Biomechanics and Models of Locomotion
 Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Physics-Based Models for People Tracking: Biomechanics and Models of Locomotion Marcus Brubaker 1 Leonid Sigal 1,2 David J Fleet 1 1 University of Toronto 2 Disney Research, Pittsburgh Biomechanics Biomechanics
Body Stabilization of PDW toward Humanoid Walking
 Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Body Stabilization of PDW toward Humanoid Walking Masaki Haruna, Masaki Ogino, Koh Hosoda, Minoru Asada Dept. of Adaptive Machine Systems, Osaka University, Suita, Osaka, 565-0871, Japan ABSTRACT Passive
Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking with Flat Feet
 2 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July, 2 Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking
2 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July, 2 Effects of Ankle Stiffness on Gait Selection of Dynamic Bipedal Walking
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 2003 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Robot motion by simultaneously wheel and leg propulsion
 Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
John Sushko. Major Professor: Kyle B. Reed, Ph.D. Rajiv Dubey, Ph.D. Jose Porteiro, Ph.D. Date of Approval: October 21, 2011
 Asymmetric Passive Dynamic Walker Used to Examine Gait Rehabilitation Methods by John Sushko A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department
Asymmetric Passive Dynamic Walker Used to Examine Gait Rehabilitation Methods by John Sushko A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department
Simulation of the Hybtor Robot
 Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Locomotion Concepts. Autonomous Mobile Robots. Concepts Legged Locomotion Wheeled Locomotion. Autonomous Systems Lab. Zürich. Localization.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Locomotion Concepts Concepts Legged Locomotion Wheeled
BUILDING A BETTER PASSIVE WALKER
 BUILDING A BETTER PASSIVE WALKER Abstract - A passive dynamic walker is a mechanism which uses gravitational energy to walk down an incline with a periodic gait. Simple passive dynamic walkers have an
BUILDING A BETTER PASSIVE WALKER Abstract - A passive dynamic walker is a mechanism which uses gravitational energy to walk down an incline with a periodic gait. Simple passive dynamic walkers have an
Toward a Human-like Biped Robot with Compliant Legs
 Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
Book Title Book Editors IOS Press, 23 1 Toward a Human-like Biped Robot with Compliant Legs Fumiya Iida a,b,1, Yohei Minekawa a Juergen Rummel a and Andre Seyfarth a a Locomotion Laboratory, University
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
Human-Inspired Control of Bipedal Walking Robots
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 59, NO. 5, MAY 2014 1115 Human-Inspired Control of Bipedal Walking Robots Aaron D. Ames Abstract This paper presents a human-inspired control approach to bipedal
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 59, NO. 5, MAY 2014 1115 Human-Inspired Control of Bipedal Walking Robots Aaron D. Ames Abstract This paper presents a human-inspired control approach to bipedal
Human Pose Tracking III: Dynamics. David Fleet University of Toronto
 Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
Human Pose Tracking III: Dynamics David Fleet University of Toronto CIFAR Summer School, 2009 Interactions with the world are fundamental Implausible motions [Poon and Fleet, 01] Kinematic Model: damped
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Motion Control of a Bipedal Walking Robot
 Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
Motion Control of a Bipedal Walking Robot Lai Wei Ying, Tang Howe Hing, Mohamed bin Hussein Faculty of Mechanical Engineering Universiti Teknologi Malaysia, 81310 UTM Skudai, Johor, Malaysia. Wylai2@live.my
This course will deal with Locomotion and Navigation that includes:
 1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
1 Key Concepts in Autonomous Mobile Robotics The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there? 1 - Introduction? To answer these questions the robot has to have
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances
 First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
Learning Energy Efficient Walking Based on Ballistics
 Learning Energy Efficient Walking Based on Ballistics Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center ogino@er.ams.eng.osaka-u.ac.jp,
Learning Energy Efficient Walking Based on Ballistics Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center ogino@er.ams.eng.osaka-u.ac.jp,
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots
 ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
ZMP Trajectory Generation for Reduced Trunk Motions of Biped Robots Jong H. Park School of Mechanical Engineering Hanyang University Seoul, 33-79, Korea email:jong.park@ieee.org Yong K. Rhee School of
ABSTRACT PATTERNS USING 3D-DYNAMIC MODELING. Kaustav Nandy, Master of Science, Department of Electrical And Computer Engineering
 ABSTRACT Title of Thesis: IDENTIFICATION OF HUMAN WALKING PATTERNS USING 3D-DYNAMIC MODELING Kaustav Nandy, Master of Science, 26 Thesis Directed By: Professor. Rama Chellappa Department of Electrical
ABSTRACT Title of Thesis: IDENTIFICATION OF HUMAN WALKING PATTERNS USING 3D-DYNAMIC MODELING Kaustav Nandy, Master of Science, 26 Thesis Directed By: Professor. Rama Chellappa Department of Electrical
Control based on passive dynamic walking
 Chapter 1 Control based on passive dynamic walking Author: Pranav A. Bhounsule Email: pranav.bhounsule@utsa.edu A liation: Dept. of Mechanical Engineering, University of Texas San Antonio, Address: 1 UTSA
Chapter 1 Control based on passive dynamic walking Author: Pranav A. Bhounsule Email: pranav.bhounsule@utsa.edu A liation: Dept. of Mechanical Engineering, University of Texas San Antonio, Address: 1 UTSA
Mobile Robots (Legged) (Take class notes)
 (Take class notes)") Mobile Robots (Legged) (Take class notes) Legged mobile robots Mobile robots are robots which can move There are two types of mobile robots - Legged two, four, six and eight legs - Wheeled one, two, three
Mobile Robots (Legged) (Take class notes) Legged mobile robots Mobile robots are robots which can move There are two types of mobile robots - Legged two, four, six and eight legs - Wheeled one, two, three
HYBRID POSITION/FORCE ALGORITHMS FOR BIPED LOCOMOTION
 HYBRID POSIION/FORCE ALGORIHMS FOR BIPED LOCOMOION Filipe M. Silva * and J.A. enreiro Machado ** * Dept. of Mechanical Engineering, University of Aveiro, Portugal ** Dept. of Electrical Engineering, Polytechnic
HYBRID POSIION/FORCE ALGORIHMS FOR BIPED LOCOMOION Filipe M. Silva * and J.A. enreiro Machado ** * Dept. of Mechanical Engineering, University of Aveiro, Portugal ** Dept. of Electrical Engineering, Polytechnic
Humanoid Robots and biped locomotion. Contact: Egidio Falotico
 Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Humanoid Robots and biped locomotion Contact: Egidio Falotico e.falotico@sssup.it Outline What is a Humanoid? Why Develop Humanoids? Challenges in Humanoid robotics Active vs Passive Locomotion Active
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance
 Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
Controlling Walking Behavior of Passive Dynamic Walker utilizing Passive Joint Compliance Takashi TAKUMA, Koh HOSODA Department of Adaptive Machine Systems, Graduate School of Engineering Osaka University
In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007.
 Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
Acknowledgement In memory of Dr. Kevin P. Granata, my graduate advisor, who was killed protecting others on the morning of April 16, 2007. There are many others without whom I could not have completed
Passive dynamic walking model with upper body M. Wisse, A. L. Schwab and F. C. T. van der Helm
 Robotica (2004) volume 22, pp. 681 688. 2004 Cambridge University Press DOI: 10.1017/S0263574704000475 Printed in the United Kingdom Passive dynamic walking model with upper body M. Wisse, A. L. Schwab
Robotica (2004) volume 22, pp. 681 688. 2004 Cambridge University Press DOI: 10.1017/S0263574704000475 Printed in the United Kingdom Passive dynamic walking model with upper body M. Wisse, A. L. Schwab
Limit Cycle Walking and Running of Biped Robots
 Tokyo Institute of Technology Yamakita Lab. Limit Cycle Walking and Running of Biped Robots Masaki Yamakita Tokyo Institute of Technology Introduction of Yamakita Lab. 1/14 Other Research Topics State
Tokyo Institute of Technology Yamakita Lab. Limit Cycle Walking and Running of Biped Robots Masaki Yamakita Tokyo Institute of Technology Introduction of Yamakita Lab. 1/14 Other Research Topics State
Foot Placement in the Simplest Slope Walker Reveals a Wide Range of Walking Solutions
 Foot Placement in the Simplest Slope Walker Reveals a Wide Range of Walking Solutions Pranav A. Bhounsule Abstract We show that the simplest slope walker can walk over wide combinations of step lengths
Foot Placement in the Simplest Slope Walker Reveals a Wide Range of Walking Solutions Pranav A. Bhounsule Abstract We show that the simplest slope walker can walk over wide combinations of step lengths
Asymmetric Passive Dynamic Walker
 11 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July 1, 11 Asymmetric Passive Dynamic Walker Craig Honeycutt, John Sushko,
11 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July 1, 11 Asymmetric Passive Dynamic Walker Craig Honeycutt, John Sushko,
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
LOCAL STABILITY ANALYSIS OF PASSIVE DYNAMIC BIPEDALROBOT
 International Journal of Robotics Research and Development (IJRRD) ISSN(P): 2250-1592; ISSN(E): 2278 9421 Vol. 4, Issue 1, Feb 2014, 9-16 TJPRC Pvt. Ltd. LOCAL STABILITY ANALYSIS OF PASSIVE DYNAMIC BIPEDALROBOT
International Journal of Robotics Research and Development (IJRRD) ISSN(P): 2250-1592; ISSN(E): 2278 9421 Vol. 4, Issue 1, Feb 2014, 9-16 TJPRC Pvt. Ltd. LOCAL STABILITY ANALYSIS OF PASSIVE DYNAMIC BIPEDALROBOT
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg. Abstract
 Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Learning Energy Efficient Walking with Ballistic Walking
 Learning Energy Efficient Walking with Ballistic Walking Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center, Osaka
Learning Energy Efficient Walking with Ballistic Walking Masaki Ogino, Koh Hosoda and Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Engineering,, HANDAI Frontier Research Center, Osaka
Swing leg retraction helps biped walking stability
 Proceedings of 25 5th IEEE-RAS International Conference on Humanoid Robots Swing leg retraction helps biped walking stability M Wisse*, C G Atkeson,DKKloimwieder * Delft University of Technology, wwwdbltudelftnl,
Proceedings of 25 5th IEEE-RAS International Conference on Humanoid Robots Swing leg retraction helps biped walking stability M Wisse*, C G Atkeson,DKKloimwieder * Delft University of Technology, wwwdbltudelftnl,
Skippy: Reaching for the Performance Envelope
 Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking
 1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
1 A Bio-inspired Behavior Based Bipedal Locomotion Control B4LC Method for Bipedal Upslope Walking JIE ZHAO, QI LIU, STEFFEN SCHUETZ, and KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern,
BIPED TRANSFORMER. Group No. 9
 BIPED TRANSFORMER Group No. 9 Name Roll Number Aditya Vikram Singh 11010305 Dhiraj Gandhi 11010321 Jagjeet Singh 11010326 Mayank Sanghani 11010336 Sriram Kumar 11010365 Vikas Singh 11010371 Abstract: This
BIPED TRANSFORMER Group No. 9 Name Roll Number Aditya Vikram Singh 11010305 Dhiraj Gandhi 11010321 Jagjeet Singh 11010326 Mayank Sanghani 11010336 Sriram Kumar 11010365 Vikas Singh 11010371 Abstract: This
STABILITY AND CHAOS IN PASSIVE-DYNAMIC LOCOMOTION
 STABILITY AND CHAOS IN PASSIVE-DYNAMIC LOCOMOTION M.J. COLEMAN, M. GARCIA, A. L. RUINA AND J. S. CAMP Department of Theoretical and Applied Mechanics Cornell University, Ithaca, NY 14853-751 AND A. CHATTERJEE
STABILITY AND CHAOS IN PASSIVE-DYNAMIC LOCOMOTION M.J. COLEMAN, M. GARCIA, A. L. RUINA AND J. S. CAMP Department of Theoretical and Applied Mechanics Cornell University, Ithaca, NY 14853-751 AND A. CHATTERJEE
Gyro stabilized biped walking
 Gyro stabilized biped walking N. Michael Mayer Asada S.I. Project, ERATO JST Osaka, Japan Email: michael@jeap.org Kazuhiro Masui Osaka University, Osaka, Japan Email: masui@jeap.org Matthew Browne CSIRO
Gyro stabilized biped walking N. Michael Mayer Asada S.I. Project, ERATO JST Osaka, Japan Email: michael@jeap.org Kazuhiro Masui Osaka University, Osaka, Japan Email: masui@jeap.org Matthew Browne CSIRO
Robots With Legs. Helge Wrede
 Robots With Legs Helge Wrede 27.11.2017 Outline Motivation Overview Properties Number of legs Balance Walking Basic Bipedal Implementation Dynamic Balancing Concepts 3D-LIPM 2 Motivation Figure: Side view
Robots With Legs Helge Wrede 27.11.2017 Outline Motivation Overview Properties Number of legs Balance Walking Basic Bipedal Implementation Dynamic Balancing Concepts 3D-LIPM 2 Motivation Figure: Side view
A 3D passive dynamic biped with yaw and roll compensation M. Wisse*, A. L. Schwab**, R. Q. vd. Linde*
 Robotica (2001) volume 19, pp. 275 284. Printed in the United Kingdom 2001 Cambridge University Press A 3D passive dynamic biped with yaw and roll compensation M. Wisse*, A. L. Schwab**, R. Q. vd. Linde*
Robotica (2001) volume 19, pp. 275 284. Printed in the United Kingdom 2001 Cambridge University Press A 3D passive dynamic biped with yaw and roll compensation M. Wisse*, A. L. Schwab**, R. Q. vd. Linde*
YAN GU. Assistant Professor, University of Massachusetts Lowell. Frederick N. Andrews Fellowship, Graduate School, Purdue University ( )
") YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
YAN GU Assistant Professor, University of Massachusetts Lowell CONTACT INFORMATION 31 University Avenue Cumnock 4E Lowell, MA 01854 yan_gu@uml.edu 765-421-5092 http://www.locomotionandcontrolslab.com RESEARCH
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2
 Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Design, Fabrication and Analysis of Microcontroller Based Bipedal Walking Robot Vaidyanathan.V.T 1 and Sivaramakrishnan.R 2 1, 2 Mechatronics, Department of Production Technology, Madras Institute of Technology,
Study of Dynamic Biped Locomotion on Rugged Terrain - Derivation and Application of the Linear Inverted Pendulum Mode -
 Proceedings of the 1991 IEEE Intemational Conference on Robotics and Automation Sacramento, California - April 1991 Study of Dynamic Biped Locomotion on Rugged Terrain - Derivation and Application of the
Proceedings of the 1991 IEEE Intemational Conference on Robotics and Automation Sacramento, California - April 1991 Study of Dynamic Biped Locomotion on Rugged Terrain - Derivation and Application of the
Walking and Running BACKGROUND REVIEW. Planar Pendulum. BIO-39 October 30, From Oct. 25, Equation of motion (for small θ) Solution is
 Solution is") Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
From Passive to Active Dynamic 3D Bipedal Walking - An Evolutionary Approach -
 From Passive to Active Dynamic 3D Bipedal Walking - An Evolutionary Approach - Steffen Wischmann and Frank Pasemann Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, 53754
From Passive to Active Dynamic 3D Bipedal Walking - An Evolutionary Approach - Steffen Wischmann and Frank Pasemann Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, 53754
Gait. Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa
 Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
Gait Kinesiology RHS 341 Lecture 12 Dr. Einas Al-Eisa Definitions Locomotion = the act of moving from one place to the other Gait = the manner of walking Definitions Walking = a smooth, highly coordinated,
(2) BIOMECHANICS of TERRESTRIAL LOCOMOTION
 BIOMECHANICS of TERRESTRIAL LOCOMOTION") (2) BIOMECHANICS of TERRESTRIAL LOCOMOTION Questions: - How does size influence the mode and speed of locomotion? - What determines the energy cost of locomotion? - Why do humans walk and run the way we
(2) BIOMECHANICS of TERRESTRIAL LOCOMOTION Questions: - How does size influence the mode and speed of locomotion? - What determines the energy cost of locomotion? - Why do humans walk and run the way we
Toward a human-like biped robot with compliant legs
 Robotics and Autonomous Systems ( ) www.elsevier.com/locate/robot Toward a human-like biped robot with compliant legs Fumiya Iida a,b,c,, Yohei Minekawa a, Jürgen Rummel a, André Seyfarth a a Locomotion
Robotics and Autonomous Systems ( ) www.elsevier.com/locate/robot Toward a human-like biped robot with compliant legs Fumiya Iida a,b,c,, Yohei Minekawa a, Jürgen Rummel a, André Seyfarth a a Locomotion
Effects of a Passive Dynamic Walker s Mechanical Parameters on Foot- Ground Clearance
 Applied Mechanics and Materials Submitted: 204-09-9 ISSN: 662-7482, Vols. 687-69, pp 279-284 Accepted: 204-09-27 doi:0.4028/www.scientific.net/amm.687-69.279 Online: 204--27 204 Trans Tech Publications,
Applied Mechanics and Materials Submitted: 204-09-9 ISSN: 662-7482, Vols. 687-69, pp 279-284 Accepted: 204-09-27 doi:0.4028/www.scientific.net/amm.687-69.279 Online: 204--27 204 Trans Tech Publications,
DETC DESIGN OPTIMIZATION OF A NOVEL TRIPEDAL LOCOMOTION ROBOT THROUGH SIMULATION AND EXPERIMENTS FOR A SINGLE STEP DYNAMIC GAIT
 Proceedings of the ASME 27 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 27 September 4-7, 27, Las Vegas, Nevada, USA DETC27-34472
Proceedings of the ASME 27 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 27 September 4-7, 27, Las Vegas, Nevada, USA DETC27-34472
Book Review. I. Background
 Book Review 1 Delft Pneumatic Bipeds by Martijn Wisse and Richard Q. van der Linde, Springer Tracts in Advanced Robotics, Vol. 34, 2007, ISBN 978-3-540-72807-8, 136 pages, US$109, Reviewed by J.W. Grizzle
Book Review 1 Delft Pneumatic Bipeds by Martijn Wisse and Richard Q. van der Linde, Springer Tracts in Advanced Robotics, Vol. 34, 2007, ISBN 978-3-540-72807-8, 136 pages, US$109, Reviewed by J.W. Grizzle
Optimal Gait Primitives for Dynamic Bipedal Locomotion
 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 2012. Vilamoura, Algarve, Portugal Optimal Gait Primitives for Dynamic Bipedal Locomotion Bokman Lim, Jusuk Lee, Joohyung
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 2012. Vilamoura, Algarve, Portugal Optimal Gait Primitives for Dynamic Bipedal Locomotion Bokman Lim, Jusuk Lee, Joohyung
Influence of the swing ankle angle on walking stability for a passive dynamic walking robot with flat feet
 Special Issue Article Influence of the swing ankle angle on walking stability for a passive dynamic walking robot with flat feet Advances in Mechanical Engineering 016, Vol. 8(3) 1 13 Ó The Author(s) 016
Special Issue Article Influence of the swing ankle angle on walking stability for a passive dynamic walking robot with flat feet Advances in Mechanical Engineering 016, Vol. 8(3) 1 13 Ó The Author(s) 016
Ankle springs instead of arc-shaped feet for passive dynamic walkers
 Ankle springs instead of arc-shaped feet for passive dynamic walkers Martijn Wisse, Daan GE Hobbelen, and Remco JJ Rotteveel Mechanical Engineering Delft University of Technology Delft, The Netherlands
Ankle springs instead of arc-shaped feet for passive dynamic walkers Martijn Wisse, Daan GE Hobbelen, and Remco JJ Rotteveel Mechanical Engineering Delft University of Technology Delft, The Netherlands
Passive Dynamic Walking with Knees: A Point Foot Model. Vanessa F. Hsu Chen. B.A., Physics (2005) Wellesley College. at the.
 Wellesley College. at the.") Passive Dynamic Walking with Knees: A Point Foot Model by Vanessa F. Hsu Chen B.S., Electrical Science and Engineering (2005) Massachusetts Institute of Technology B.A., Physics (2005) Wellesley College
Passive Dynamic Walking with Knees: A Point Foot Model by Vanessa F. Hsu Chen B.S., Electrical Science and Engineering (2005) Massachusetts Institute of Technology B.A., Physics (2005) Wellesley College
by Michael Young Human Performance Consulting
 by Michael Young Human Performance Consulting The high performance division of USATF commissioned research to determine what variables were most critical to success in the shot put The objective of the
by Michael Young Human Performance Consulting The high performance division of USATF commissioned research to determine what variables were most critical to success in the shot put The objective of the
hip swing leg (bent for part of walking cycle) stance leg (locked straight) knees
 stance leg (locked straight) knees") Small Slope Implies Low Speed for McGeer's Passive Walking Machines Anindya Chatterjee Engineering Science & Mechanics Dept. Penn State University University Park, PA 16802, USA Mariano Garcia Λ Dept.
Small Slope Implies Low Speed for McGeer's Passive Walking Machines Anindya Chatterjee Engineering Science & Mechanics Dept. Penn State University University Park, PA 16802, USA Mariano Garcia Λ Dept.
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53. The design of exoskeleton lower limbs rehabilitation robot
 Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 53 CADDM The design of exoskeleton lower limbs rehabilitation robot Zhao Xiayun 1, Wang Zhengxing 2, Liu Zhengyu 1,3,
Journal of Chemical and Pharmaceutical Research, 2016, 8(6): Research Article. Walking Robot Stability Based on Inverted Pendulum Model
: Research Article. Walking Robot Stability Based on Inverted Pendulum Model") Available online www.jocpr.com Journal of Chemical and Pharmaceutical Research, 2016, 8(6):463-467 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Walking Robot Stability Based on Inverted Pendulum
Available online www.jocpr.com Journal of Chemical and Pharmaceutical Research, 2016, 8(6):463-467 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Walking Robot Stability Based on Inverted Pendulum
First Hops of the 3D Bow Leg
 First Hops of the 3D Bow Leg Garth Zeglin and H. Benjamin Brown, Jr. Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213, USA ABSTRACT We have constructed several hopping machines using
First Hops of the 3D Bow Leg Garth Zeglin and H. Benjamin Brown, Jr. Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213, USA ABSTRACT We have constructed several hopping machines using
ON PASSIVE MOTION OF THE ARMS FOR A WALKING PLANAR BIPED
 ON PASSIVE MOTION OF THE ARMS FOR A WALKING PLANAR BIPED Bassel Kaddar, Yannick Aoustin, Christine Chevallereau To cite this version: Bassel Kaddar, Yannick Aoustin, Christine Chevallereau. ON PASSIVE
ON PASSIVE MOTION OF THE ARMS FOR A WALKING PLANAR BIPED Bassel Kaddar, Yannick Aoustin, Christine Chevallereau To cite this version: Bassel Kaddar, Yannick Aoustin, Christine Chevallereau. ON PASSIVE
Design and Modeling of a Mobile Robot
 Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Design and Modeling of a Mobile Robot with an Optimal Obstacle-Climbing Mode The pen WHEEL Project Jean-Christophe FAUROUX Morgann FORLOROU Belhassen Chedli BOUZGARROU Frédéric CHAPELLE 1/33 LaMI / TIMS
Sample Solution for Problem 1.a
 Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Sample Solution for Problem 1.a 1 Inverted Pendulum Model (IPM) 1.1 Equations of Motion and Ground Reaction Forces Figure 1: Scheme of the Inverted Pendulum Model (IPM). The equations of motion of this
Energetics of Actively Powered Locomotion Using the Simplest Walking Model
 Arthur D. Kuo Dept. of Mechanical Engineering and Applied Mechanics, University of Michigan, Ann Arbor, MI 48109-2125 email: artkuo@umich.edu Energetics of Actively Powered Locomotion Using the Simplest
Arthur D. Kuo Dept. of Mechanical Engineering and Applied Mechanics, University of Michigan, Ann Arbor, MI 48109-2125 email: artkuo@umich.edu Energetics of Actively Powered Locomotion Using the Simplest
DATA EQUATIONS MATH ANSWER
 HCP PHYSICS REVIEW SHEET MID TERM EXAM Concepts And Definitions 1. Definitions of fact, hypothesis, law, theory 2. Explain the scientific method 3. Difference between average and instantaneous speed and
HCP PHYSICS REVIEW SHEET MID TERM EXAM Concepts And Definitions 1. Definitions of fact, hypothesis, law, theory 2. Explain the scientific method 3. Difference between average and instantaneous speed and
An Evolved Neural Controller for Bipedal Walking with Dynamic Balance
 An Evolved Neural Controller for Bipedal Walking with Dynamic Balance Michael E. Palmer 1859 Laboratories, Inc. 922 Matadero Ave. Palo Alto, CA 94306 +1-415-867-3653 mep@1859labs.com Daniel B. Miller Singular
An Evolved Neural Controller for Bipedal Walking with Dynamic Balance Michael E. Palmer 1859 Laboratories, Inc. 922 Matadero Ave. Palo Alto, CA 94306 +1-415-867-3653 mep@1859labs.com Daniel B. Miller Singular
Microprocessor Technology in Ankle Prosthetics
 Microprocessor Technology in Ankle Prosthetics Arizona State University Dr. Thomas Sugar Former Students LTC Joseph Hitt, PhD Dr. Kevin Hollander Dr. Matthew Holgate Dr. Jeffrey Ward Mr. Alex Boehler Mr.
Microprocessor Technology in Ankle Prosthetics Arizona State University Dr. Thomas Sugar Former Students LTC Joseph Hitt, PhD Dr. Kevin Hollander Dr. Matthew Holgate Dr. Jeffrey Ward Mr. Alex Boehler Mr.
Powered Bipeds Based on Passive Dynamic Principles
 Proceedings of 25 5th IEEE-RAS International Conference on Humanoid Robots Powered Bipeds Based on Passive Dynamic Principles S. O. Anderson,M.Wisse,C.G.Atkeson, J.K. Hodgins,G.J.Zeglin,B.Moyer Carnegie
Proceedings of 25 5th IEEE-RAS International Conference on Humanoid Robots Powered Bipeds Based on Passive Dynamic Principles S. O. Anderson,M.Wisse,C.G.Atkeson, J.K. Hodgins,G.J.Zeglin,B.Moyer Carnegie
Design and control of Ranger: an energy-efficient, dynamic walking robot
 1 Design and control of Ranger: an energy-efficient, dynamic walking robot Pranav A. Bhounsule, Jason Cortell and Andy Ruina Biorobotics and Locomotion Laboratory, 306 Kimball Hall, Cornell University,
1 Design and control of Ranger: an energy-efficient, dynamic walking robot Pranav A. Bhounsule, Jason Cortell and Andy Ruina Biorobotics and Locomotion Laboratory, 306 Kimball Hall, Cornell University,
Velocity Based Stability Margins for Fast Bipedal Walking
 Velocity Based Stability Margins for Fast Bipedal Walking Jerry E. Pratt 1 and Russ Tedrake 2 1 Florida Institute for Human and Machine Cognition jpratt@ihmc.us 2 Massachusettes Institute of Technology
Velocity Based Stability Margins for Fast Bipedal Walking Jerry E. Pratt 1 and Russ Tedrake 2 1 Florida Institute for Human and Machine Cognition jpratt@ihmc.us 2 Massachusettes Institute of Technology
Design of a Humanoid Biped Robot for Walking Research
 Design of a Humanoid Biped Robot for Walking Research Daniel Paluska, Jerry Pratt, David Robinson, Gill Pratt MIT Leg Laboratory Cambridge, MA 02139 http://www.ai.mit.edu/projects/leglab/robots/m2/m2.html
Design of a Humanoid Biped Robot for Walking Research Daniel Paluska, Jerry Pratt, David Robinson, Gill Pratt MIT Leg Laboratory Cambridge, MA 02139 http://www.ai.mit.edu/projects/leglab/robots/m2/m2.html
Optimization of an off-road bicycle with four-bar linkage rear suspension
 Proceedings of MUSME 2008, the International Symposium on Multibody Systems and Mechatronics San Juan (Argentina), 8-12 April 2008 Paper n. 02-MUSME08 Optimization of an off-road bicycle with four-bar
Proceedings of MUSME 2008, the International Symposium on Multibody Systems and Mechatronics San Juan (Argentina), 8-12 April 2008 Paper n. 02-MUSME08 Optimization of an off-road bicycle with four-bar
SIMULATION AND EXPERIMENTAL STUDIES ON WALKING ROBOT WITH FLEXIBLE LEGS
 SIMULATION AND EXPERIMENTAL STUDIES ON WALKING ROBOT WITH LEXIBLE LEGS V. L. Krishnan (a, P. M. Pathak (b, Lokesh Sardana (c, S. C. Jain (d Robotics and Control Laboratory Mechanical and Industrial Engineering
SIMULATION AND EXPERIMENTAL STUDIES ON WALKING ROBOT WITH LEXIBLE LEGS V. L. Krishnan (a, P. M. Pathak (b, Lokesh Sardana (c, S. C. Jain (d Robotics and Control Laboratory Mechanical and Industrial Engineering
A MODIFIED DYNAMIC MODEL OF THE HUMAN LOWER LIMB DURING COMPLETE GAIT CYCLE
 Int. J. Mech. Eng. & Rob. Res. 2013 S M Nacy et al., 2013 Research Paper ISSN 2278 0149 www.ijmerr.com Vol. 2, No. 2, April 2013 2013 IJMERR. All Rights Reserved A MODIFIED DYNAMI MODEL OF THE HUMAN LOWER
Int. J. Mech. Eng. & Rob. Res. 2013 S M Nacy et al., 2013 Research Paper ISSN 2278 0149 www.ijmerr.com Vol. 2, No. 2, April 2013 2013 IJMERR. All Rights Reserved A MODIFIED DYNAMI MODEL OF THE HUMAN LOWER
University of Twente
 University of Twente EEMCS / Electrical Engineering Control Engineering Ankle actuation for planar bipedal robots Michel Franken MSc Report Supervisors: prof.dr.ir. S. Stramigioli ir. G. van Oort ir. E.C.
University of Twente EEMCS / Electrical Engineering Control Engineering Ankle actuation for planar bipedal robots Michel Franken MSc Report Supervisors: prof.dr.ir. S. Stramigioli ir. G. van Oort ir. E.C.
Design of a double quadruped for the Tech United soccer robot
 Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Design of a double quadruped for the Tech United soccer robot M.J. Naber (0571509) DCT report number: 2009.134 Master Open Space project Eindhoven, 21 December 2009 Supervisor dr.ir. P.C.J.N. Rosielle
Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF
 Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF George Chen May 17, 2002 Stanford Neuromuscular Biomechanics Lab Group Muscle contribution
Current issues regarding induced acceleration analysis of walking using the integration method to decompose the GRF George Chen May 17, 2002 Stanford Neuromuscular Biomechanics Lab Group Muscle contribution
-Elastic strain energy (duty factor decreases at higher speeds). Higher forces act on feet. More tendon stretch. More energy stored in tendon.
. Higher forces act on feet. More tendon stretch. More energy stored in tendon.") As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
Feedback Control of Dynamic Bipedal Robot Locomotion
 Eric R. Westervelt, Jessy W. Grizzle, Christine Chevallereau, Jun Ho Choi, and Benjamin Morris 1 Feedback Control of Dynamic Bipedal Robot Locomotion CRC PRESS Boca Raton Ann Arbor London Tokyo c 2007
Eric R. Westervelt, Jessy W. Grizzle, Christine Chevallereau, Jun Ho Choi, and Benjamin Morris 1 Feedback Control of Dynamic Bipedal Robot Locomotion CRC PRESS Boca Raton Ann Arbor London Tokyo c 2007
Stable Upright Walking and Running using a simple Pendulum based Control Scheme
 1 Stable Upright Walking and Running using a simple Pendulum based Control Scheme H.-M. MAUS, J. RUMMEL and A. SEYFARTH Lauflabor Locomotion Laboratory, University of Jena, Germany E-mail: moritz.maus@uni-jena.de
1 Stable Upright Walking and Running using a simple Pendulum based Control Scheme H.-M. MAUS, J. RUMMEL and A. SEYFARTH Lauflabor Locomotion Laboratory, University of Jena, Germany E-mail: moritz.maus@uni-jena.de
Faster and Smoother Walking of Humanoid HRP-2 with Passive Toe Joints *
 Faster and Smoother Walking of Humanoid HRP-2 with Passive Toe Joints * Ramzi Sellaouti *1, Olivier Stasse *2, Shuuji Kajita *3, Kazuhito Yokoi *1 and Abderrahmane Kheddar *2 *1 JRL, AIST *2 JRL, CNRS
Faster and Smoother Walking of Humanoid HRP-2 with Passive Toe Joints * Ramzi Sellaouti *1, Olivier Stasse *2, Shuuji Kajita *3, Kazuhito Yokoi *1 and Abderrahmane Kheddar *2 *1 JRL, AIST *2 JRL, CNRS
Gait analysis for the development of the biped robot foot structure
 Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 4-9, 4 Gait analysis for the development of the biped robot foot structure Yusuke OGAWA
PHYSICS REVIEW SHEET 2010 MID-TERM EXAM
 PHYSICS REVIEW SHEET 2010 MID-TERM EXAM Concepts And Definitions Definitions of fact, hypothesis, law, theory Explain the scientific method Difference between average and instantaneous speed and speed
PHYSICS REVIEW SHEET 2010 MID-TERM EXAM Concepts And Definitions Definitions of fact, hypothesis, law, theory Explain the scientific method Difference between average and instantaneous speed and speed
Human-Oriented Biped Robot Design: Insights into the Development of a truly Anthropomorphic Leg
 Human-Oriented Biped Robot Design: Insights into the Development of a truly Anthropomorphic Leg Giuseppina Gini 1, Umberto Scarfogliero 2, Michele Folgheraiter 1 1 Department of Electronics and Information,
Human-Oriented Biped Robot Design: Insights into the Development of a truly Anthropomorphic Leg Giuseppina Gini 1, Umberto Scarfogliero 2, Michele Folgheraiter 1 1 Department of Electronics and Information,
3D Walking Biped: Optimal Swing of the Arms. hal , version 1-30 Jun 2013
 Author manuscript, published in "Multibody System Dynamics (2013) 10.1007/s11044-013-9378-3" DOI : 10.1007/s11044-013-9378-3 Noname manuscript No. (will be inserted by the editor) 3D Walking Biped: Optimal
Author manuscript, published in "Multibody System Dynamics (2013) 10.1007/s11044-013-9378-3" DOI : 10.1007/s11044-013-9378-3 Noname manuscript No. (will be inserted by the editor) 3D Walking Biped: Optimal
Data Driven Computational Model for Bipedal Walking and Push Recovery
 Data Driven Computational Model for Bipedal Walking and Push Recovery A thesis Submitted In Partial Fulfillment of the Requirements for the Degree of Philosophy Vijay Bhaskar Semwal RS139 Under the supervision
Data Driven Computational Model for Bipedal Walking and Push Recovery A thesis Submitted In Partial Fulfillment of the Requirements for the Degree of Philosophy Vijay Bhaskar Semwal RS139 Under the supervision
Modeling Human Movement
 CS 4732: Computer Animation Modeling Human Movement Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Modeling Human Movement: It s Hard!
CS 4732: Computer Animation Modeling Human Movement Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Modeling Human Movement: It s Hard!
Supplementary Information
 Supplementary Information Novel robotic interface to evaluate, enable, and train locomotion and balance after neuromotor disorders Nadia Dominici, Urs Keller, Heike Vallery, Lucia Friedli, Rubia van den
Supplementary Information Novel robotic interface to evaluate, enable, and train locomotion and balance after neuromotor disorders Nadia Dominici, Urs Keller, Heike Vallery, Lucia Friedli, Rubia van den
Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and its step climbing strategy
 Munakata and Wada ROBOMECH Journal (2015) 2:7 DOI 10.1186/s40648-015-0028-9 RESEARCH ARTICLE Open Access Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and
Munakata and Wada ROBOMECH Journal (2015) 2:7 DOI 10.1186/s40648-015-0028-9 RESEARCH ARTICLE Open Access Development and analysis of a novel add-on drive mechanism for motorizing a manual wheelchair and
Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal
 Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal Sérgio Tosi Rodrigues 1, Valéria Duarte Garcia 1,2, Arturo Forner- Cordero
Sensitivity of toe clearance to leg joint angles during extensive practice of obstacle crossing: Effects of vision and task goal Sérgio Tosi Rodrigues 1, Valéria Duarte Garcia 1,2, Arturo Forner- Cordero
Robotics (Locomotion) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics (Locomotion) Winter 1393 Bonab University Locomotion Movement or the ability to move Locomotion Locomotion mechanisms used in biological systems: -Successful in harsh environments -Inspired most
Robotics (Locomotion) Winter 1393 Bonab University Locomotion Movement or the ability to move Locomotion Locomotion mechanisms used in biological systems: -Successful in harsh environments -Inspired most
Optimized Passive Coupling Control for Biped Robot
 TELKOMNIKA, ol. 11, No. 6, June 13, pp. 344 ~ 35 e-issn: 87-78X 344 Optimized Passive Coupling Control or Biped Robot Lipeng YUAN* 1,, Amur Al Yahmedi 3, Liming Yuan 4 1 School o Mechanical and Electrical
TELKOMNIKA, ol. 11, No. 6, June 13, pp. 344 ~ 35 e-issn: 87-78X 344 Optimized Passive Coupling Control or Biped Robot Lipeng YUAN* 1,, Amur Al Yahmedi 3, Liming Yuan 4 1 School o Mechanical and Electrical
Decentralized Autonomous Control of a Myriapod Locomotion Robot
 Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi
Decentralized utonomous Control of a Myriapod Locomotion Robot hmet Onat Sabanci University, Turkey onat@sabanciuniv.edu Kazuo Tsuchiya Kyoto University, Japan tsuchiya@kuaero.kyoto-u.ac.jp Katsuyoshi