Sea Search Operations AF 447 A February 2010
|
|
|
- Merilyn Strickland
- 5 years ago
- Views:
Transcription
1 Sea Search Operations AF 447 A February 2010
2 Search Phases Phase 1 : Acoustic search for Underwater Locator Beacons (10 June to 10 July in the search zone) Phase 2 : Search for the wreckage using a towed array SONAR (27 July to 17 August in the search zone) Preparations for Phase 3: Establishment of international group (AAIB, BFU, CENIPA, MAK, NTSB, SG Mer, US Navy) Determination of the search zone International call for tenders and selection of means
3 Determination of the Search Zone
4 A Scientific Challenge The sea area is turbulent, the currents are rapidly variable, which makes it difficult to generate models, Oceanic general circulation models in operational mode do not reproduce the available current observations (phases 1&2), It is necessary to have additional current measurements to overcome this problem, Time management in relation to the operational constraints.
, il est nécessaire de disposer de mesures de courant supplémentaires pour dépasser cette situation, gestion du temps en")
5 Un enjeu scientifique La zone est turbulente, les courants rapidement variables, ce qui rend leur modélisation délicate, les modèles de la circulation générale océanique dans leur mode opérationnel ne reproduisent pas les observations de courant disponibles (phases 1&2), il est nécessaire de disposer de mesures de courant supplémentaires pour dépasser cette situation, gestion du temps en fonction des contraintes opérationnelles.
6 Constitution of the Group Objective: broaden the range of skills available. Call for international cooperation Calling on additional expertise in the fields of: Collection and analysis of data, Re-analyzing meteorological data, Re-analyzing (and re-processing) oceanographic data, Theoretical research, Statistics.
7 Group Members Société Collecte Localisation Satellites (France), Ecole Normale Supérieure (France), Laboratoire de Physique des Océans / IFREMER (France), Laboratoire de Physique des Océans / CNRS (France), Institut de Mathématiques de Toulouse (France), Institute of Numerical Mathematics of the Russian Academy of Sciences (Russian Federation), Mercator Océan (France), Météo-France (France), National Oceanography Center (United Kingdom), Service Hydrographique et Océanographique de la Marine (France), Woods Hole Oceanographic Institution (United States).
8 Group Tasks Widen collection and analysis of data Improve estimation of currents Estimate errors in drift calculations Propose a search zone
, Sattellite data (temperature, colour of water, water height anomaly de),")
9 Widen collection and analysis of data Observations of currents, 5 different wind models, Data relating to the debris (initial information on 5 June), Sattellite data (temperature, colour of water, water height anomaly de), etc.
10 Improve Estimation of Currents Complementary approaches: a posteriori validation of data and implementation of refined models, assimilation of observations on the currents, methods to interpolate observations. Examples of results

11 Estimated currents on 5 June at 18h by the optimal interpolation method

12
13 Estimate Errors in Drift Calculations Estimation of the models capacity to recreate the trajectories: - tests on trajectories of buoys, - modelling of the debris dispersion, Sensitivity of the models results to forcing by the wind, Sensitivity to the initial conditions, Uncertainty of the effect of the wind on the submerged parts of the debris, Uncertainty of the correlation scales, Influence of the waves, «Robustness» of the estimates.
14 Propose a Search Zone Statistical model for the integration of the results Weighting of the results according to the associated error Theoretical confidence interval of 95%
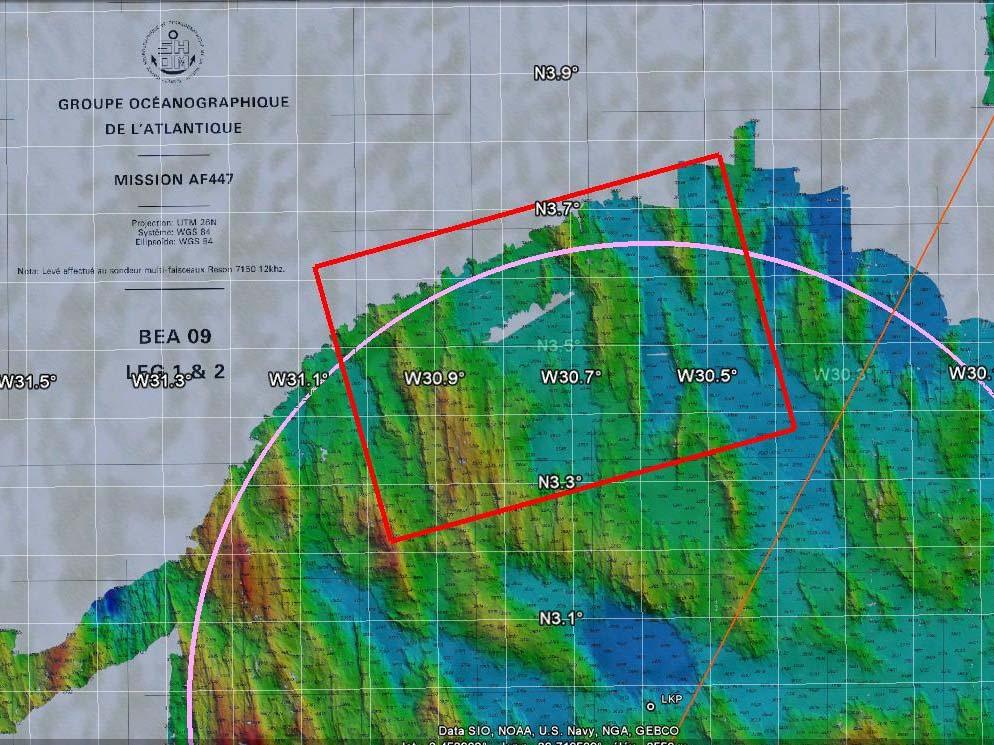
15
16 Limitations The group s work was based on: the state of the art in oceanography, a review of the results and methods by recognized experts,..though this work reached the limits of current knowledge. Optimisation and revision of the zone during the sea operations.
17 Means Selected

 Seabed Worker (Seabed")
18 Means Selected for the 3 rd Phase Two search vessels: Anne Candies (Phoenix International, United States) Seabed Worker (Seabed Group, Norway)


")

19 Equipment on Board the Seabed Worker Three autonomous underwater vehicles (AUV) Three REMUS 6000 (WHOI & GEOMAR) Side Scan Sonar 120/410 khz One ROV (SEABED) Triton XLX 4000
 CURV 21 (6,000")
20 Means on Board the Anne Candies Deep Towed Sonar and ROV managed by the US Navy ORION (56 / 240 khz) CURV 21 (6,000 metres)
21 Additional Means Equipment Speed Turn time Seabed type Autonomy Ship requirements Area coverage Deep Towed SONAR 2 kt 3h Relatively smooth, slight slopes 10 days Consistent slow speed 100 km 2 per day AUV 2 to 4 kt 1/4h Relatively smooth, medium slopes 1 to 2 days with PAC Escort 200 km 2 per day w/ 2 AUV s ROV 0.5 to 1 kt 1/4h All 3 days Dynamic positioning 5 km 2 per day


22 Examples of SONAR Data Rough terrain Sedimentary zone
 To be compared")

23 Example of a Detection (phase 2) To be compared with other accidents to aircraft of a similar size


24 Example: B-52 Guam Accident (July 2008) ORION 56 khz 900 m scale

25 Results double-checking doubtful data - the Victor ROV => cluster of rocks

26 Mobilizing the Means Equipment from US Navy + three REMUS 6000 (Woods Hole & Washington) In the zone 3 days later Transfer of equipment on board the Seabed Worker Arrival of specialized teams and investigators Mid-March 2010
27 On-board Team Under the direction of the BEA: specialists from the manufacturer, the airline, foreign counterparts (AAIB, BFU) and from IFREMER. Presence on board of two senior police officers and a liaison officer from the French Navy



28 Additional Logistical Elements Stationing of a French Navy patrol ship at Cayenne for possible recorder transport By plane Transfer Cayenne Site
29 Conclusions Means selected: Working to a depth of 6,000 m Complementary (ROV, AUV, towed array sonar) Fail-safe back-ups: Two ships Three autonomous SONARS + 1 deep towed SONAR Two ROV s
30
Search Analysis for the Underwater Wreckage of Air France Flight 447
 Search Analysis for the Underwater Wreckage of Air France Flight 447 Lawrence D. Stone Colleen M. Keller Thomas M. Kratzke Metron Inc Reston Virginia, U.S.A. Stone@metsci.com keller@metsci.com kratzke@metsci.com
Search Analysis for the Underwater Wreckage of Air France Flight 447 Lawrence D. Stone Colleen M. Keller Thomas M. Kratzke Metron Inc Reston Virginia, U.S.A. Stone@metsci.com keller@metsci.com kratzke@metsci.com
Offshore Wind Energy Stringent quality assurance and quality control. Coastal and Freshwater Fast responding and flexible organisation
 Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
CORIOLIS, A FRENCH PROJECT FOR IN SITU OPERATIONAL OCEANOGRAPHY. S. Pouliquen, A. Billant, Y. Desaubies, G. Loaec, F. Gaillard, G.
 CORIOLIS, A FRENCH PROJECT FOR IN SITU OPERATIONAL OCEANOGRAPHY S. Pouliquen, A. Billant, Y. Desaubies, G. Loaec, F. Gaillard, G. Maudire IFREMER, BP70, 29280 Plouzané, France Sylvie.Pouliquen@ifremer.fr
CORIOLIS, A FRENCH PROJECT FOR IN SITU OPERATIONAL OCEANOGRAPHY S. Pouliquen, A. Billant, Y. Desaubies, G. Loaec, F. Gaillard, G. Maudire IFREMER, BP70, 29280 Plouzané, France Sylvie.Pouliquen@ifremer.fr
An experimental validation of a robust controller on the VAIMOS autonomous sailboat. Fabrice LE BARS
 An experimental validation of a robust controller on the VAIMOS autonomous sailboat Fabrice LE BARS Outline Introduction VAIMOS, an autonomous sailboat for oceanography Autonomy / control Theoretical validation
An experimental validation of a robust controller on the VAIMOS autonomous sailboat Fabrice LE BARS Outline Introduction VAIMOS, an autonomous sailboat for oceanography Autonomy / control Theoretical validation
INTERNATIONAL HYDROGRAPHIC REVIEW MAY 2015
 OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
Chapter 1. The Science of Marine Biology - Why is it important? Marine Biology. The scientific study of the organisms that live in the sea
 Chapter 1 The Science of Marine Biology - Why is it important? Marine Biology Marine Biology - The scientific study of the organisms that live in the sea 1 Practical Reasons to study marine biology Vast
Chapter 1 The Science of Marine Biology - Why is it important? Marine Biology Marine Biology - The scientific study of the organisms that live in the sea 1 Practical Reasons to study marine biology Vast
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
Challenges of Sea Search and Recovery Operations Sharing of Experience from a Recent Joint Operation
 Challenges of Sea Search and Recovery Operations Sharing of Experience from a Recent Joint Operation Tatang Kurniadi Chairman, Indonesia National Transportation Safety Committee Ng Junsheng Accident Investigator,
Challenges of Sea Search and Recovery Operations Sharing of Experience from a Recent Joint Operation Tatang Kurniadi Chairman, Indonesia National Transportation Safety Committee Ng Junsheng Accident Investigator,
AAIB SINGAPORE AAIB. Note: Other agencies may carry out their own investigations (e.g. Coroner, CAAS, Police) SINGAPORE
 SINGAPORE") A department of Ministry of Transport Independent of regulatory and judicial authorities and aviation services providers Investigation authority to fulfil Singapore s Annex 13 obligation Note: Other agencies
A department of Ministry of Transport Independent of regulatory and judicial authorities and aviation services providers Investigation authority to fulfil Singapore s Annex 13 obligation Note: Other agencies
In ocean evaluation of low frequency active sonar systems
 Acoustics 8 Paris In ocean evaluation of low frequency active sonar systems K.T. Hjelmervik and G.H. Sandsmark FFI, Postboks 5, 39 Horten, Norway kth@ffi.no 2839 Acoustics 8 Paris Sonar performance measurements
Acoustics 8 Paris In ocean evaluation of low frequency active sonar systems K.T. Hjelmervik and G.H. Sandsmark FFI, Postboks 5, 39 Horten, Norway kth@ffi.no 2839 Acoustics 8 Paris Sonar performance measurements
AUVs for oceanographic science at IFREMER, project progress and operational feedback
 AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
SEAHORSES and SUBMARINES Testing transformational capabilities with modern UUVs at NAVOCEANO by Craig A. Peterson and Martha E. M.
 SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
On the assimilation of SAR wave spectra of S-1A in the wave model MFWAM
 On the assimilation of SAR wave spectra of S-1A in the wave model MFWAM Lotfi Aouf and Alice Dalphinet Météo-France, Département Marine et Océanographie,Toulouse 14 th wave forecasting and hindcasting,
On the assimilation of SAR wave spectra of S-1A in the wave model MFWAM Lotfi Aouf and Alice Dalphinet Météo-France, Département Marine et Océanographie,Toulouse 14 th wave forecasting and hindcasting,
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities
 Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
Physical oceanography in the Gulf of Guinea
 Physical oceanography in the Gulf of Guinea PLAN 1. Recalls & scientific context 2. International & regional programs and main goals of EGEE/AMMA, PIRATA & TACE 3. What is RIPIECSA and goals of RIPIECSA-Ocean
Physical oceanography in the Gulf of Guinea PLAN 1. Recalls & scientific context 2. International & regional programs and main goals of EGEE/AMMA, PIRATA & TACE 3. What is RIPIECSA and goals of RIPIECSA-Ocean
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Minimal influence of wind and tidal height on underwater noise in Haro Strait
 Minimal influence of wind and tidal height on underwater noise in Haro Strait Introduction Scott Veirs, Beam Reach Val Veirs, Colorado College December 2, 2007 Assessing the effect of wind and currents
Minimal influence of wind and tidal height on underwater noise in Haro Strait Introduction Scott Veirs, Beam Reach Val Veirs, Colorado College December 2, 2007 Assessing the effect of wind and currents
Echo Sounder Evaluation of XBT Drop Rate off the coast of Florida
 Echo Sounder Evaluation of XBT Drop Rate off the coast of Florida Lockheed Martin Sippican Grant Johnson Engineering Project Manager Ocean Products 9/22/2010 1 Introduction New fall rate evaluation approach
Echo Sounder Evaluation of XBT Drop Rate off the coast of Florida Lockheed Martin Sippican Grant Johnson Engineering Project Manager Ocean Products 9/22/2010 1 Introduction New fall rate evaluation approach
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
Background Paper: Surveys. Nord Stream 2 AG Sep-17
 Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Ocean Observing Systems Summer Teacher Institute August 10 August 14, 2009
 OOS? What s that?? COSEE-West 2008 Ocean Observing Systems Summer Teacher Institute Resources/Lesson Plans http://www.usc.edu/org/cosee-west/resources.html#aug08 Teacher created lesson plans from 2008
OOS? What s that?? COSEE-West 2008 Ocean Observing Systems Summer Teacher Institute Resources/Lesson Plans http://www.usc.edu/org/cosee-west/resources.html#aug08 Teacher created lesson plans from 2008
Fremtidsrettede prosjekter ved SMS
 Fremtidsrettede prosjekter ved SMS Arctic Emergency Operations Arctic Marine Operations Bård E. Bjørnsen Projects & Business Development Ship Manoeuvring Simulator Centre AS Bakgrunn for nordområdeprosjektene
Fremtidsrettede prosjekter ved SMS Arctic Emergency Operations Arctic Marine Operations Bård E. Bjørnsen Projects & Business Development Ship Manoeuvring Simulator Centre AS Bakgrunn for nordområdeprosjektene
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY
 THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
THE APPLICATION OF THE FUSION POSITIONING SYSTEM TO MARINE ARCHAEOLOGY PETER HOLT Sonardyne International Ltd, Blackbushe Business Park, Yateley, Hants, UK E-mail: pete@threeh.demon.co.uk The Sonardyne
Body Search and Recovery Using Sonar
 Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Archimer
 Please note that this is an author-produced PDF of an article accepted for publication following peer review. The definitive publisher-authenticated version is available on the publisher Web site Sea Technology
Please note that this is an author-produced PDF of an article accepted for publication following peer review. The definitive publisher-authenticated version is available on the publisher Web site Sea Technology
CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY
 CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY JON WEGGE Norwegian Defence Research Establishment (FFI), PO Box 115, NO-3191 Horten, Norway E-mail: jon.wegge@ffi.no False alarms resulting from
CORRELATION BETWEEN SONAR ECHOES AND SEA BOTTOM TOPOGRAPHY JON WEGGE Norwegian Defence Research Establishment (FFI), PO Box 115, NO-3191 Horten, Norway E-mail: jon.wegge@ffi.no False alarms resulting from
Investigating Acoustic Anomalies in the Water Column. Alistair Robertshaw, Geohazards Specialist, BP Oceanology 2016
 Investigating Acoustic Anomalies in the Water Column Alistair Robertshaw, Geohazards Specialist, BP Oceanology 2016 Overview Water Column Data First Impressions Basic Theory Reflection Geometries Examples
Investigating Acoustic Anomalies in the Water Column Alistair Robertshaw, Geohazards Specialist, BP Oceanology 2016 Overview Water Column Data First Impressions Basic Theory Reflection Geometries Examples
Deep-sea search and recovery: with and without operating an underwater vehicle
 Deep-sea search and recovery: with and without operating an underwater vehicle Tongwei Zhang 1,2,3, Shengjie Qin 1, Xiangxin Wang 1, Jialing Tang 1 1 National Deep Sea Center, Qingdao 266237, China 2 Laboratory
Deep-sea search and recovery: with and without operating an underwater vehicle Tongwei Zhang 1,2,3, Shengjie Qin 1, Xiangxin Wang 1, Jialing Tang 1 1 National Deep Sea Center, Qingdao 266237, China 2 Laboratory
Argentine Navy ARA San Juan (S-42) Search 2018
 Search 2018") Daily Status Report: OI Seabed Constructor 22.09.18 Key Developments; Next 24hrs; 11:32hrs LT Perform cargo transfer (2x Edge Tech Bottles etc) with ARA Admiral Brown. Acoustically maintained AUV Fleet(5)
Daily Status Report: OI Seabed Constructor 22.09.18 Key Developments; Next 24hrs; 11:32hrs LT Perform cargo transfer (2x Edge Tech Bottles etc) with ARA Admiral Brown. Acoustically maintained AUV Fleet(5)
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Results of mathematical modelling the kinetics of gaseous exchange through small channels in micro dischargers
 Journal of Physics: Conference Series PAPER OPEN ACCESS Results of mathematical modelling the kinetics of gaseous exchange through small channels in micro dischargers Related content - The versatile use
Journal of Physics: Conference Series PAPER OPEN ACCESS Results of mathematical modelling the kinetics of gaseous exchange through small channels in micro dischargers Related content - The versatile use
The impact of ocean bottom morphology on the modelling of long gravity waves from tides and tsunami to climate
 The impact of ocean bottom morphology on the modelling of long gravity waves from tides and tsunami to climate Christian Le Provost and Florent Lyard Laboratoire d Etudes en Géophysique et Océanographie
The impact of ocean bottom morphology on the modelling of long gravity waves from tides and tsunami to climate Christian Le Provost and Florent Lyard Laboratoire d Etudes en Géophysique et Océanographie
History/Explorers/Expeditions/Technology Webquest!
 Name Block History/Explorers/Expeditions/Technology Webquest! http://www.divediscover.whoi.edu/history-ocean/21st.html Click on: History of Oceanography (on the left side of the page) 1. Oceanography may
Name Block History/Explorers/Expeditions/Technology Webquest! http://www.divediscover.whoi.edu/history-ocean/21st.html Click on: History of Oceanography (on the left side of the page) 1. Oceanography may
APPLICATION OF SOUND PROPAGATION (IN THE PERSIAN GULF AND OMAN SEA)
") APPLICATION OF SOUND PROPAGATION (IN THE PERSIAN GULF AND OMAN SEA) Seyed Majid Mosaddad Department of Physics, Shoushtar Branch, Islamic Azad University, Shoushtar, Iran Email: mosaddad5@gmail.com Abstract
APPLICATION OF SOUND PROPAGATION (IN THE PERSIAN GULF AND OMAN SEA) Seyed Majid Mosaddad Department of Physics, Shoushtar Branch, Islamic Azad University, Shoushtar, Iran Email: mosaddad5@gmail.com Abstract
ENVIRONMENTALLY ADAPTIVE SONAR
 ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
Jackie May* Mark Bourassa. * Current affilitation: QinetiQ-NA
 Jackie May* Mark Bourassa * Current affilitation: QinetiQ-NA Background/Motivation In situ observations (ships and buoys) are used to validate satellite observations Problems with comparing data Sparseness
Jackie May* Mark Bourassa * Current affilitation: QinetiQ-NA Background/Motivation In situ observations (ships and buoys) are used to validate satellite observations Problems with comparing data Sparseness
Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters Vitalii A. Sheremet, Principal Investigator
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters Vitalii A. Sheremet, Principal Investigator
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys
 MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
PERCEPTIVE ROBOT MOVING IN 3D WORLD. D.E- Okhotsimsky, A.K. Platonov USSR
 PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
PERCEPTIVE ROBOT MOVING IN 3D WORLD D.E- Okhotsimsky, A.K. Platonov USSR Abstract. This paper reflects the state of development of multilevel control algorithms for a six-legged mobile robot. The robot
Recommended operating guidelines (ROG) for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:
 for sidescan Sidescan sonar ROG in wrapper.doc English Number of pages: 9 Summary:") Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Title: Author(s): Document owner: Recommended operating guidelines (ROG) for sidescan sonar Dave Long (BGS) Dave Long (BGS) Reviewed by: Janine Guinan (MI) 07/09/07 Workgroup: MESH action: 2.1 Version:
Nemo Link s puxo campaign
 BLOCK 3 BLOCK 2 U e c n France 400000 570000 KP 0 KP 10 KP 20 KP 30 a r F 565000 BLOCK 1 450000 Belgique 0 5 ONGOING 10 15 20 km N 565000 t i n g n i K Nearshore BE Fra m o d ed KP 50 KP 60 KP 70 KP 80
BLOCK 3 BLOCK 2 U e c n France 400000 570000 KP 0 KP 10 KP 20 KP 30 a r F 565000 BLOCK 1 450000 Belgique 0 5 ONGOING 10 15 20 km N 565000 t i n g n i K Nearshore BE Fra m o d ed KP 50 KP 60 KP 70 KP 80
Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement
 SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
Oceanographic Research With The LiquID Station
 Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Sparse LBL aided INS for Subsea Positioning
 Sparse LBL aided INS for Subsea Positioning Edward Moller Global Business Manager Construction Survey What is LBL? GPS Network What is LBL? We turn GPS upside down LBL installed in a subsea field development
Sparse LBL aided INS for Subsea Positioning Edward Moller Global Business Manager Construction Survey What is LBL? GPS Network What is LBL? We turn GPS upside down LBL installed in a subsea field development
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology
 How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
Chapter 9: Sea operations
 Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Autonomous Underwater Vehicles Explorer Class
 Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
"Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider"
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
2012 INDUSTRY DAY Society of American Military Engineers - Omaha Post
 2012 INDUSTRY DAY Society of American Military Engineers - Omaha Post Omaha District Corps of Engineers Military Munitions Design Center (MMDC) Glenn Marks MMDC Manager May 8, 2012 US Army Corps of Engineers
2012 INDUSTRY DAY Society of American Military Engineers - Omaha Post Omaha District Corps of Engineers Military Munitions Design Center (MMDC) Glenn Marks MMDC Manager May 8, 2012 US Army Corps of Engineers
The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface in Waves
 Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface
Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface
Wave research at Department of Oceanography, University of Hawai i
 Wave research at Department of Oceanography, University of Hawai i Hawaii wave climate. Directional waverider buoys around Hawaii. Past and present wave-related research projects. Effect of tides on wave
Wave research at Department of Oceanography, University of Hawai i Hawaii wave climate. Directional waverider buoys around Hawaii. Past and present wave-related research projects. Effect of tides on wave
7 YEARS METEOMAST AMRUMBANK WEST
 7 YEARS METEOMAST AMRUMBANK WEST Joerg Bendfeld(1), Jens Krieger(2) (1) University of Paderborn, Kompetenzzentrum für nachhaltige Energietechnik KET, Pohlweg 55, 33098 Paderborn, Germany, (2) airwerk GmbH,
7 YEARS METEOMAST AMRUMBANK WEST Joerg Bendfeld(1), Jens Krieger(2) (1) University of Paderborn, Kompetenzzentrum für nachhaltige Energietechnik KET, Pohlweg 55, 33098 Paderborn, Germany, (2) airwerk GmbH,
USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC)
") USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC) BAA Number: HSCG32-07-R-R00013 Title of Proposal: Heavy Oil Tracking Tactics, Techniques
USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC) BAA Number: HSCG32-07-R-R00013 Title of Proposal: Heavy Oil Tracking Tactics, Techniques
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
1 The range of monitoring and ways of its performing
 Methodology of underwater monitoring T. Graczyk, M. Matejski & W. Skorski Ocean & Ship Technology Institute Technical University of Szczecin Al Piastow 41, 71-065 Szczecin, Poland Abstract Underwater monitoring
Methodology of underwater monitoring T. Graczyk, M. Matejski & W. Skorski Ocean & Ship Technology Institute Technical University of Szczecin Al Piastow 41, 71-065 Szczecin, Poland Abstract Underwater monitoring
Sensor Platform Project Marine Trials Bidders Conference. Fundy Ocean Research Center for Energy fundyforce.ca
 Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
SINGULAR WAVES, PROPAGATION AND PROGNOSIS. H. Günther, W. Rosenthal
 SINGULAR WAVES, PROPAGATION AND PROGNOSIS H. Günther, W. Rosenthal GKSS Research Center Geesthacht Institute for Coastal Research Geesthacht, Germany Within the last years a high number of large ships
SINGULAR WAVES, PROPAGATION AND PROGNOSIS H. Günther, W. Rosenthal GKSS Research Center Geesthacht Institute for Coastal Research Geesthacht, Germany Within the last years a high number of large ships
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
Marine Mammal Scientific Support Research Programme MMSS/001/11
 Marine Mammal Scientific Support Research Programme MMSS/001/11 MR 7.1.1: Report Quantifying porpoise depth distributions and underwater behaviour in tidal rapids areas Sea Mammal Research Unit Report
Marine Mammal Scientific Support Research Programme MMSS/001/11 MR 7.1.1: Report Quantifying porpoise depth distributions and underwater behaviour in tidal rapids areas Sea Mammal Research Unit Report
Marine Renewables Industry Association. Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling
 Marine Renewables Industry Association Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling October 2009 Table of Contents 1. Introduction... 1 2. Measurements
Marine Renewables Industry Association Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling October 2009 Table of Contents 1. Introduction... 1 2. Measurements
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
Chapter 20.0 Marine Noise and Vibration
 Chapter 20.0 Marine Noise and Vibration www.tidallagoonswanseabay.com www.tidallagooncardiff.com 20.0 Marine Noise and Vibration 20.1 Overview of existing situation 20.1.0.1 Estuaries by their nature (relatively
Chapter 20.0 Marine Noise and Vibration www.tidallagoonswanseabay.com www.tidallagooncardiff.com 20.0 Marine Noise and Vibration 20.1 Overview of existing situation 20.1.0.1 Estuaries by their nature (relatively
Chemical Plume Mapping with an Autonomous Underwater Vehicle
 Chemical Plume Mapping with an Autonomous Underwater Vehicle Barbara Fletcher Space and Naval Warfare Systems Center San Diego (SSC San Diego) 49590 Lassing Road San Diego, CA 92152 (619) 553-3859 bfletch@spawar.navy.mil
Chemical Plume Mapping with an Autonomous Underwater Vehicle Barbara Fletcher Space and Naval Warfare Systems Center San Diego (SSC San Diego) 49590 Lassing Road San Diego, CA 92152 (619) 553-3859 bfletch@spawar.navy.mil
Characterizing The Surf Zone With Ambient Noise Measurements
 Characterizing The Surf Zone With Ambient Noise Measurements LONG-TERM GOAL Grant Deane Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 93093-0213 phone: (619) 534-0536 fax:
Characterizing The Surf Zone With Ambient Noise Measurements LONG-TERM GOAL Grant Deane Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 93093-0213 phone: (619) 534-0536 fax:
Statistics of wind and wind power over the Mediterranean Sea
 Conférence Méditerranéenne Côtière et Maritime EDITION 2, TANGER, MAROC (2011) Coastal and Maritime Mediterranean Conference Disponible en ligne http://www.paralia.fr Available online Statistics of wind
Conférence Méditerranéenne Côtière et Maritime EDITION 2, TANGER, MAROC (2011) Coastal and Maritime Mediterranean Conference Disponible en ligne http://www.paralia.fr Available online Statistics of wind
Search Methodology. massive parts of the aircraft traveled down the reef. yet, unexplored depths. The Niku VII expedition. will have the capability to
 CONTENTS Expedition Purpose & Objective... 2 Search Area... 2 Search Methodology... 3 Search Technology... 4 Documentation... 5 Expedition Itinerary... 5 Expedition Team... 5 Ship Description & Photo Gallery...
CONTENTS Expedition Purpose & Objective... 2 Search Area... 2 Search Methodology... 3 Search Technology... 4 Documentation... 5 Expedition Itinerary... 5 Expedition Team... 5 Ship Description & Photo Gallery...
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Where are the Bathymetric Hot-Spots?
 Where are the Bathymetric Hot-Spots? Dave Monahan Center for Coastal and Ocean Mapping University of New Hampshire If I win really BIG at the Casino tonight Every now and then, there are news stories of
Where are the Bathymetric Hot-Spots? Dave Monahan Center for Coastal and Ocean Mapping University of New Hampshire If I win really BIG at the Casino tonight Every now and then, there are news stories of
Kathleen Dohan. Wind-Driven Surface Currents. Earth and Space Research, Seattle, WA
 Updates to OSCAR and challenges with capturing the wind-driven currents. Wind-Driven Surface Currents Kathleen Dohan Earth and Space Research, Seattle, WA ENSO OSCAR Surface currents from satellite fields
Updates to OSCAR and challenges with capturing the wind-driven currents. Wind-Driven Surface Currents Kathleen Dohan Earth and Space Research, Seattle, WA ENSO OSCAR Surface currents from satellite fields
Concarneau, June 23 rd The Moroccan Royal Navy entrusted PIRIOU with the building of Hydro-Oceanographic and Multi-Missions vessel
 P RESS RELEASE Concarneau, June 23 rd 2016 The Moroccan Royal Navy entrusted PIRIOU with the building of Hydro-Oceanographic and Multi-Missions vessel PIRIOU has just recorded a new order from the Moroccan
P RESS RELEASE Concarneau, June 23 rd 2016 The Moroccan Royal Navy entrusted PIRIOU with the building of Hydro-Oceanographic and Multi-Missions vessel PIRIOU has just recorded a new order from the Moroccan
Effect of noise in the performance of the transducers in an ultrasonic flow meter of natural gas
 23rd World Gas Conference, Amsterdam 2006 Effect of noise in the performance of the transducers in an ultrasonic flow meter of natural gas Main author R. Villarroel Venezuela TABLE OF CONTENTS 1. Abstract
23rd World Gas Conference, Amsterdam 2006 Effect of noise in the performance of the transducers in an ultrasonic flow meter of natural gas Main author R. Villarroel Venezuela TABLE OF CONTENTS 1. Abstract
Understanding the Dynamics of Shallow-Water Oceanographic Moorings
 Understanding the Dynamics of Shallow-Water Oceanographic Moorings Mark A. Grosenbaugh Department of Applied Ocean Physics & Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543 phone:
Understanding the Dynamics of Shallow-Water Oceanographic Moorings Mark A. Grosenbaugh Department of Applied Ocean Physics & Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543 phone:
An independent study to assess and validate the shape and size of the Potentially Impacted Areas used in BEAWARE 2 Qualitative results
 An independent study to assess and validate the shape and size of the Potentially Impacted Areas used in BEAWARE 2 Qualitative results Project: BE-AWARE II Author : Sébastien Legrand Reference: MFC/2015/SL/BE-AWARE/report_potentially_impacted_areas_v1.1
An independent study to assess and validate the shape and size of the Potentially Impacted Areas used in BEAWARE 2 Qualitative results Project: BE-AWARE II Author : Sébastien Legrand Reference: MFC/2015/SL/BE-AWARE/report_potentially_impacted_areas_v1.1
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS
 INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
INTERNATIONAL HYDROGRAPHIC SURVEY STANDARDS by Gerald B. MILLS 1 I. Background The International Hydrographic Organization (IHO) traces its origin to the establishment of the International Hydrographic
Wind Stress Working Group 2015 IOVWST Meeting Portland, OR
 Wind Stress Working Group 2015 IOVWST Meeting Portland, OR Summary of Research Topics, Objectives and Questions James B. Edson University of Connecticut SPURS Mooring, Farrar, WHOI Background Motivation
Wind Stress Working Group 2015 IOVWST Meeting Portland, OR Summary of Research Topics, Objectives and Questions James B. Edson University of Connecticut SPURS Mooring, Farrar, WHOI Background Motivation
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions
 Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
A Next Generation Self- Locating Datum Marker Buoy
 A Next Generation Self- Locating Datum Marker Buoy A smaller, more easily deployed and faster reporting SLDMB Gary Williams and Eugene Zeyger Clearwater Instrumentation, Inc. www.clearwaterinstrumentation.com
A Next Generation Self- Locating Datum Marker Buoy A smaller, more easily deployed and faster reporting SLDMB Gary Williams and Eugene Zeyger Clearwater Instrumentation, Inc. www.clearwaterinstrumentation.com
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
UXO Below: Mitigating Marine UXO Risk
 RPS Energy Ltd Explosives Engineering Services UXO Below: Mitigating Marine UXO Risk Presented by Victoria Phillips 1 Aim To deliver an overview of Unexploded Ordnance (UXO) in the marine environment,
RPS Energy Ltd Explosives Engineering Services UXO Below: Mitigating Marine UXO Risk Presented by Victoria Phillips 1 Aim To deliver an overview of Unexploded Ordnance (UXO) in the marine environment,
Hydroacoustic surveys of Otsego Lake s pelagic fish community,
 Hydroacoustic surveys of Otsego Lake s pelagic fish community, 2010 1 Holly A. Waterfield 2 and Mark Cornwell 3 INTRODUCTION Hydroacoustic surveys were conducted in May and November 2010 to estimate pelagic
Hydroacoustic surveys of Otsego Lake s pelagic fish community, 2010 1 Holly A. Waterfield 2 and Mark Cornwell 3 INTRODUCTION Hydroacoustic surveys were conducted in May and November 2010 to estimate pelagic
A. Bentamy 1, S. A. Grodsky2, D.C. Fillon1, J.F. Piollé1 (1) Laboratoire d Océanographie Spatiale / IFREMER (2) Univ. Of Maryland
 Laboratoire d Océanographie Spatiale / IFREMER (2) Univ. Of Maryland") Calibration and Validation of Multi-Satellite scatterometer winds A. Bentamy 1, S. A. Grodsky2, D.C. Fillon1, J.F. Piollé1 (1) Laboratoire d Océanographie Spatiale / IFREMER (2) Univ. Of Maryland Topics
Calibration and Validation of Multi-Satellite scatterometer winds A. Bentamy 1, S. A. Grodsky2, D.C. Fillon1, J.F. Piollé1 (1) Laboratoire d Océanographie Spatiale / IFREMER (2) Univ. Of Maryland Topics