Wave Glider: Liege Colloquium. Colloquium April 27
|
|
|
- Lucy Lambert
- 5 years ago
- Views:
Transcription
1 The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium Colloquium th 2010 April April 27 27th 2010 Justin Justin Manley, Manley, Neil Neil Trenaman, Trenaman, Scott Scott Willcox Willcox Liquid Liquid Robotics Robotics Inc. Inc. 1

2 Founded: January staff Headquarters: Sunnyvale California Test & Development: Big Island of Hawaii Customers & Collaborators: Globally Kawaihae

3 Wave Glider Basics Unique Two Part Vehicle: Converts wave motion into thrust Calm and rough seas Thrust generation increases with sea state Long mission durations possible Both a Buoy and a Vehicle Travel to operation area Return for maintenance Patrol, survey or hold station It s Real: Existing fleet has traveled over 60,000 nmi Distance of longest mission, 6200 nmi Duration of longest mission, 365 days
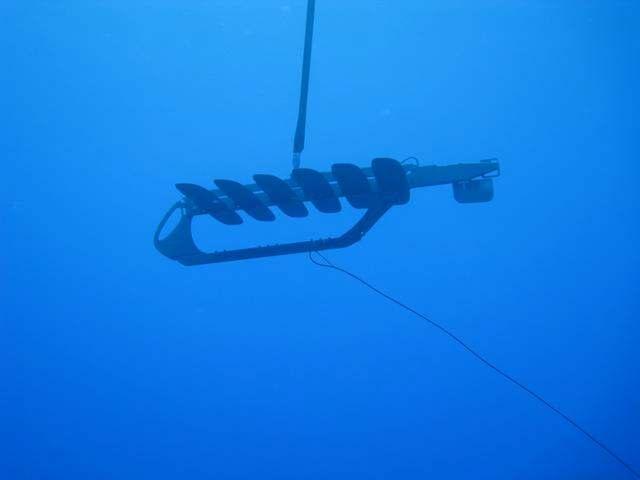
4 Wave Glider Concept 7m Fins 2m Both upward and downward motions produce thrust A rudder at the tail of the glider steers the vehicle in any direction

5 Copyright Liquid Liquid Robotics Inc. Inc.
6
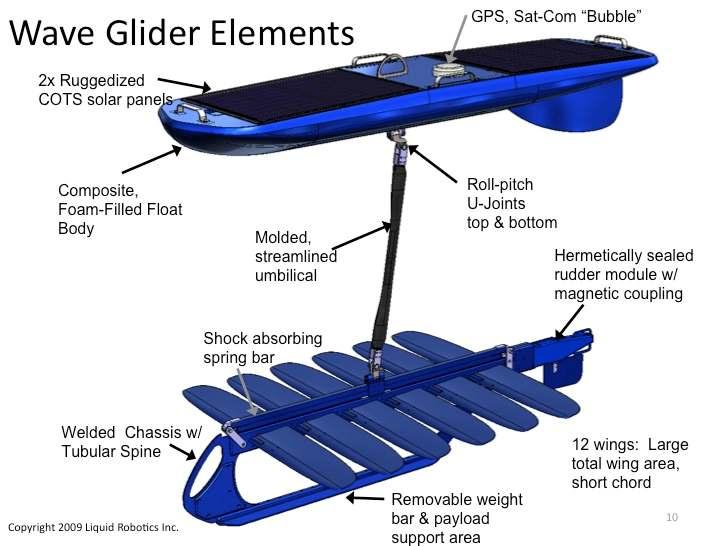
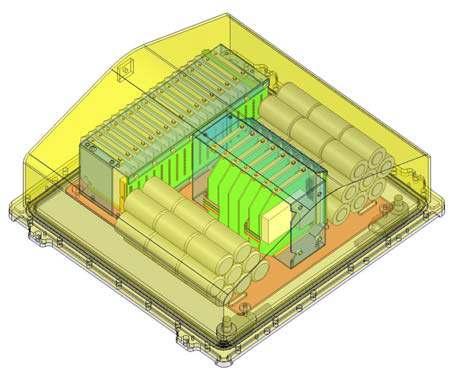
7 Configurable Float Ruggedized COTS solar panels Core Electronics Module Aft Payload Forward Payload 4.5 kg Li-ion batteries: 665 Watt-hour Configurable Payload Boxes Composite, Foam-Filled Float Body Central Antenna Deck


8 Web Based User Interface Copyright 2009 Liquid Robotics Inc. 8

9 Wave Glider Speed Performance Under typical sea conditions, Wave Glider advances at 1.5 kts, independent of wave direction. Wave Glider maintains 0.25 to 0.50 kt headway, even under very calm conditions. Proprietary, Copyright Copyright 2010 Liquid 2010 Liquid Robotics Robotics Inc. Inc.



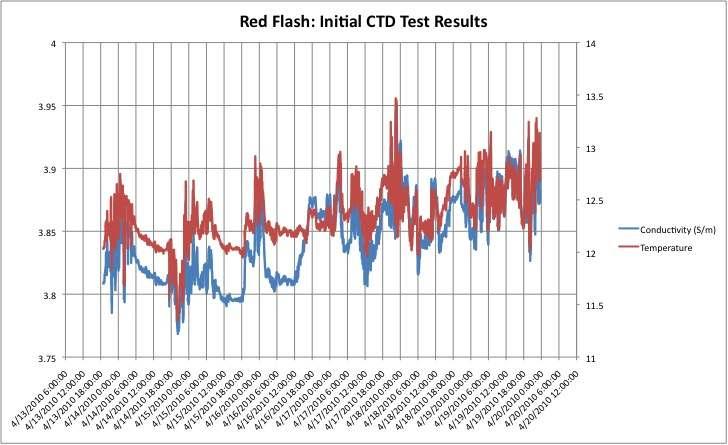
10 August-Sept. 09 Red Flash Monterey - Alaska Proven Long Range Capability April-June 09 Red Flash Monterey -San Diego -Eureka June-August 09 Honu & Kohola Hawaii San Diego
11 West Coast Cruise Monterey to Alaska, August 13 September 23, 2009 Red Flash was launched out of Monterey and sent on an offshore course for Alaska. Onboard weather sensor data compared favorably against existing weather buoys Encountered 40 knot winds and 6.1 meter waves Distance: 1300 nm Duration: 41 days Average Speed: 1.5 kts


12 Heavy Weather Alaska Canada Border
13 Applications


14 Station Keeping Comparison WG: 50m M2 1700m 50m radius 50m radius Copyright 2010 Copyright Liquid 2010 Robotics Liquid Inc. Robotics Inc. 14

15
16 M1 Mooring M2 Mooring
17


18 ADCP Trials Successful system integration, Teledyne RDI 600 khz Sentinel Series of tests to evaluate the ADCP performance and data quality Data below the glider validated Surface layers between the float and glider understood to be good quality

19 Passive Acoustics: HARP + Wave Glider

20 Cosmic Ray Detection Neutron array Charged particle detector (protons and muons) Spectral gamma sensor Forward Waveglider payload drybox Data acquisition/processing module
21 Experiment Plan





22 Tsunami Warning NOAA DART Buoy Test Provided redundant communications with bottom mounted sensor DART buoy off Kona coast Glider on station 08/03/09 to 08/23/09 Transited with glider based payload Supported acomms to BPR Station keeping functionality demonstrated



23 CO 2 Flux Monitoring Collaboration with NOAA s Pacific Marine Environmental Laboratory Integrate bio-geo-chemical sensor suite on wave glider Deploy in Pacific Ocean Calibration and Evaluation Long-term monitoring in South Pacific



24 METOC Wave Glider Wave Measurement Instrumentation ADCP & CTD Support Electronics Weather Station CTD ADCP Flourometer CTD
25 Ride the next wave with us! Looking forward to feedback, discussions and collaboration. Demonstrations in Hawaii encouraged! Contact: Neil Trenaman, Vice President Sales , Justin Manley, Director Scientific and Commercial Business ,
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Persistent Platform for Ocean Science
 The Wave Glider: A Persistent Platform for Ocean Science Justin Manley and Scott Willcox Liquid Robotics - Sunnyvale, CA justin.manley@liquidr.com, http://www.liquidr.com Abstract The Wave Glider is an
The Wave Glider: A Persistent Platform for Ocean Science Justin Manley and Scott Willcox Liquid Robotics - Sunnyvale, CA justin.manley@liquidr.com, http://www.liquidr.com Abstract The Wave Glider is an
"Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider"
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
The Next Generation Easy-to-Deploy (ETD) Tsunami Assessment Buoy
 Tsunami Assessment Buoy") The Next Generation Easy-to-Deploy (ETD) Tsunami Assessment Buoy R.A. Lawson and D. Graham Science Applications International Corporation 4025 Hancock Street San Diego, CA 92110 USA S. Stalin, C. Meinig,
The Next Generation Easy-to-Deploy (ETD) Tsunami Assessment Buoy R.A. Lawson and D. Graham Science Applications International Corporation 4025 Hancock Street San Diego, CA 92110 USA S. Stalin, C. Meinig,
Long-Term Autonomous Measurement of Ocean Dissipation with EPS-MAPPER
 Long-Term Autonomous Measurement of Ocean Dissipation with EPS-MAPPER Neil S. Oakey Bedford Institute of Oceanography Dartmouth, Nova Scotia Canada B2Y 4A2 phone: (902) 426-3147 fax: (902) 426-7827 e-mail:
Long-Term Autonomous Measurement of Ocean Dissipation with EPS-MAPPER Neil S. Oakey Bedford Institute of Oceanography Dartmouth, Nova Scotia Canada B2Y 4A2 phone: (902) 426-3147 fax: (902) 426-7827 e-mail:
NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader Community
 Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions
 Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
TRIAXYS Acoustic Doppler Current Profiler Comparison Study
 TRIAXYS Acoustic Doppler Current Profiler Comparison Study By Randolph Kashino, Axys Technologies Inc. Tony Ethier, Axys Technologies Inc. Reo Phillips, Axys Technologies Inc. February 2 Figure 1. Nortek
TRIAXYS Acoustic Doppler Current Profiler Comparison Study By Randolph Kashino, Axys Technologies Inc. Tony Ethier, Axys Technologies Inc. Reo Phillips, Axys Technologies Inc. February 2 Figure 1. Nortek
WEBB RESEARCH CORPORATION
 Use spacebar or arrow keys to advance slide show WEBB RESEARCH CORPORATION Falmouth, MA APEX Profiler SLOCUM Glider Rev: 06/22/08 WEBB RESEARCH CORPORATION Specialists in neutrally buoyant drifters and
Use spacebar or arrow keys to advance slide show WEBB RESEARCH CORPORATION Falmouth, MA APEX Profiler SLOCUM Glider Rev: 06/22/08 WEBB RESEARCH CORPORATION Specialists in neutrally buoyant drifters and
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010)
") RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
San Diego Coastal Ocean Observing System
 California Clean Beaches Initiative San Diego Coastal Ocean Observing System WWW.SDCOOS.ORG Presentation to Imperial Beach City Council August 3, 2005 Eric J. Terrill, Ph.D. Scripps Institution of Oceanography
California Clean Beaches Initiative San Diego Coastal Ocean Observing System WWW.SDCOOS.ORG Presentation to Imperial Beach City Council August 3, 2005 Eric J. Terrill, Ph.D. Scripps Institution of Oceanography
MAPCO2 Buoy Metadata Report Project Title:
 MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
Acoustic Seaglider for Beaked Whale Detection
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale ion Neil M. Bogue and Jim Luby Applied Physics Laboratory University of Washington
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale ion Neil M. Bogue and Jim Luby Applied Physics Laboratory University of Washington
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
PRESENTATION ON AN INNOVATIVE OCEAN PLATFORM FOR SPECIAL OBSERVATION CAMPAIGN & FAST DEPLOYMENT & MAINTENANCE OF DATA BUOYS
 PRESENTATION ON AN INNOVATIVE OCEAN PLATFORM FOR SPECIAL OBSERVATION CAMPAIGN & FAST DEPLOYMENT & MAINTENANCE OF DATA BUOYS BY UGI CONTI, K.PREMKUMAR, ISABELL CONTI AT DBCP XXV 2009 SCIENTIFIC & TECHNICAL
PRESENTATION ON AN INNOVATIVE OCEAN PLATFORM FOR SPECIAL OBSERVATION CAMPAIGN & FAST DEPLOYMENT & MAINTENANCE OF DATA BUOYS BY UGI CONTI, K.PREMKUMAR, ISABELL CONTI AT DBCP XXV 2009 SCIENTIFIC & TECHNICAL
MOTUS Wave Buoys. Powered By the Aanderaa MOTUS Directional Wave Sensor
 MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
MOTUS Wave Buoys Powered By the Aanderaa MOTUS Directional Wave Sensor Two Buoys, One Brain The Aanderaa MOTUS directional wave sensor factory calibrated and currently available on two proven buoy platforms:
Autonomous Environmental Profiling Moorings for Coastal Monitoring
 Autonomous Environmental Profiling Moorings for Coastal Monitoring Jeffrey W. Book Naval Research Laboratory, Stennis Space Center, MS Introduction There are many reasons to monitor coastal environments
Autonomous Environmental Profiling Moorings for Coastal Monitoring Jeffrey W. Book Naval Research Laboratory, Stennis Space Center, MS Introduction There are many reasons to monitor coastal environments
Update on Canadian Research Vessels Ship Procurement Projects
 Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Update on Canadian Research Vessels Ship Procurement Projects 28 th International Research Ship Operators Meeting (IRSO) La Jolla, California October 2012 Jennifer Vollrath 1 Outline National Ship Building
Draft of OKMC Cruise Plan (R/V Revelle June 1-14, 2012 RR1205)
") Draft of OKMC Cruise Plan (R/V Revelle June 1-14, 2012 RR1205) Ren-Chieh Lien and Thomas B Sanford 1. Objectives In the RR1205 cruise, we will deploy five subsurface moorings, one surface mooring (TBD),
Draft of OKMC Cruise Plan (R/V Revelle June 1-14, 2012 RR1205) Ren-Chieh Lien and Thomas B Sanford 1. Objectives In the RR1205 cruise, we will deploy five subsurface moorings, one surface mooring (TBD),
WHOTS Mooring Subsurface Instrumentation
 UH Contributions to WHOTS-13 Cruise Report by Fernando Santiago-Mandujano, Daniel McCoy, Jefrey Snyder, R. Walter Deppe, Kellen Rosburg, Glenn Carter, Katrina Berry, and Roger Lukas WHOTS Mooring Subsurface
UH Contributions to WHOTS-13 Cruise Report by Fernando Santiago-Mandujano, Daniel McCoy, Jefrey Snyder, R. Walter Deppe, Kellen Rosburg, Glenn Carter, Katrina Berry, and Roger Lukas WHOTS Mooring Subsurface
NWEI. Fred.Olsen. Columbia Power
 U.S. Marine Corps Base Hawaii, Kaneohe 30m, 60m, 80m berths in place, grid-connected First device deployed, second Jan 2016, third Sep 2016 HNEI role Funded by DOE, US Navy, ONR, State of Hawaii Acoustic,
U.S. Marine Corps Base Hawaii, Kaneohe 30m, 60m, 80m berths in place, grid-connected First device deployed, second Jan 2016, third Sep 2016 HNEI role Funded by DOE, US Navy, ONR, State of Hawaii Acoustic,
Marine Mammal Acoustic Tracking from Adapting HARP Technologies
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Marine Mammal Acoustic Tracking from Adapting HARP Technologies Sean M. Wiggins and John A. Hildebrand Marine Physical
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Marine Mammal Acoustic Tracking from Adapting HARP Technologies Sean M. Wiggins and John A. Hildebrand Marine Physical
CRUISE REPORT FOR UW BERING STRAIT MOORING PROJECT 2005 Rebecca Woodgate, University of
 CRUISE REPORT FOR UW BERING STRAIT MOORING PROJECT 2005 Rebecca Woodgate, University of Washington,woodgate@apl.washington.edu CCGC Sir Wilfrid Laurier 2005-05 Kodiak, 8 th July 2005 Barrow, 22nd July
CRUISE REPORT FOR UW BERING STRAIT MOORING PROJECT 2005 Rebecca Woodgate, University of Washington,woodgate@apl.washington.edu CCGC Sir Wilfrid Laurier 2005-05 Kodiak, 8 th July 2005 Barrow, 22nd July
2017 Float and Sensor Workshop. Conveners: Brian King, Steve Riser, Susan Wijffels Local Host: Steve Riser, U. Washington
 2017 Float and Sensor Workshop Conveners: Brian King, Steve Riser, Susan Wijffels Local Host: Steve Riser, U. Washington Objectives The goals of the workshop were to Increase the overall efficiency of
2017 Float and Sensor Workshop Conveners: Brian King, Steve Riser, Susan Wijffels Local Host: Steve Riser, U. Washington Objectives The goals of the workshop were to Increase the overall efficiency of
Wave-Phase-Resolved Air-Sea Interaction
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
AUVs for oceanographic science at IFREMER, project progress and operational feedback
 AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
AUVs for oceanographic science at IFREMER, project progress and operational feedback Jan Opderbecke Jean-Marc Laframboise Jan.Opderbecke@ifremer.fr jmlaframboise@ise.bc.ca IFREMER ISE Research Ltd Department
NAVAL POSTGRADUATE SCHOOL THESIS
 NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA THESIS WAVE-POWERED UNMANNED SURFACE VEHICLE AS A STATION-KEEPING GATEWAY NODE FOR UNDERSEA DISTRIBUTED NETWORKS by Timothy W. Rochholz September 2012 Thesis
NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA THESIS WAVE-POWERED UNMANNED SURFACE VEHICLE AS A STATION-KEEPING GATEWAY NODE FOR UNDERSEA DISTRIBUTED NETWORKS by Timothy W. Rochholz September 2012 Thesis
Understanding the Dynamics of Shallow-Water Oceanographic Moorings
 Understanding the Dynamics of Shallow-Water Oceanographic Moorings Mark A. Grosenbaugh Department of Applied Ocean Physics & Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543 phone:
Understanding the Dynamics of Shallow-Water Oceanographic Moorings Mark A. Grosenbaugh Department of Applied Ocean Physics & Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543 phone:
A Wind Profiling Platform for Offshore Wind Measurements and Assessment. Presenter: Mark Blaseckie AXYS Technologies Inc.
 A Wind Profiling Platform for Offshore Wind Measurements and Assessment Presenter: Mark Blaseckie AXYS Technologies Inc. Any Sensor, Any Telemetry, Any Environment Founded in 1974 Part of the AXYS Group
A Wind Profiling Platform for Offshore Wind Measurements and Assessment Presenter: Mark Blaseckie AXYS Technologies Inc. Any Sensor, Any Telemetry, Any Environment Founded in 1974 Part of the AXYS Group
SPECIFICATIONS OF FAST PATROL BOATS(FPBs) FOR FLOATING BORDER OUT POSTs(BOPs)
 FOR FLOATING BORDER OUT POSTs(BOPs)") SPECIFICATIONS OF FAST PATROL BOATS(FPBs) FOR FLOATING BORDER OUT POSTs(BOPs) 1. Overview 2. Hull The Patrol Boat (PB) proposed for the BSF Floating BOP has been specifically designed to meet the projected
SPECIFICATIONS OF FAST PATROL BOATS(FPBs) FOR FLOATING BORDER OUT POSTs(BOPs) 1. Overview 2. Hull The Patrol Boat (PB) proposed for the BSF Floating BOP has been specifically designed to meet the projected
RV Southern Surveyor program
 2011 RV Southern Surveyor program voyageplan SS2011_c01 Tsunami Detection Buoy Maintenance for Australian Tsunami Warning System (ATWS) Itinerary Mobilise 0700 Sydney, Tuesday 5 April 2011 Depart Sydney
2011 RV Southern Surveyor program voyageplan SS2011_c01 Tsunami Detection Buoy Maintenance for Australian Tsunami Warning System (ATWS) Itinerary Mobilise 0700 Sydney, Tuesday 5 April 2011 Depart Sydney
Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science
 Moorings: New Capabilities for Seagoing Science") Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
Ocean Observatories Initiative Ocean Observatories Initiative (OOI) Moorings: New Capabilities for Seagoing Science presented by Ed Dever and Walt Waldorf November 20, 2014 OOI Science Themes Coastal and
the 2012 Marine Field Projects. The report details the motivations for the Wave Glider project,
 TRANSMITTAL Florida Institute of Technology Department of Marine and Environmental Systems Marine Field Project TO: FROM: RE: Dr. Stephen Wood, P.E. Program Chair, Ocean Engineering Department of Marine
TRANSMITTAL Florida Institute of Technology Department of Marine and Environmental Systems Marine Field Project TO: FROM: RE: Dr. Stephen Wood, P.E. Program Chair, Ocean Engineering Department of Marine
ITTC Recommended Procedures Testing and Extrapolation Methods Loads and Responses, Seakeeping Experiments on Rarely Occurring Events
 Loads and Responses, Seakeeping Page 1 of 5 CONTENTS 1. PURPOSE OF PROCEDURE 2. STANDARDS FOR EXPERIMENTS ON RARELY OCCURRING EVENTS 2.1 Previous Recommendations of ITTC 2.2 Model Design and Construction
Loads and Responses, Seakeeping Page 1 of 5 CONTENTS 1. PURPOSE OF PROCEDURE 2. STANDARDS FOR EXPERIMENTS ON RARELY OCCURRING EVENTS 2.1 Previous Recommendations of ITTC 2.2 Model Design and Construction
COMPARISON OF DEEP-WATER ADCP AND NDBC BUOY MEASUREMENTS TO HINDCAST PARAMETERS. William R. Dally and Daniel A. Osiecki
 COMPARISON OF DEEP-WATER ADCP AND NDBC BUOY MEASUREMENTS TO HINDCAST PARAMETERS William R. Dally and Daniel A. Osiecki Surfbreak Engineering Sciences, Inc. 207 Surf Road Melbourne Beach, Florida, 32951
COMPARISON OF DEEP-WATER ADCP AND NDBC BUOY MEASUREMENTS TO HINDCAST PARAMETERS William R. Dally and Daniel A. Osiecki Surfbreak Engineering Sciences, Inc. 207 Surf Road Melbourne Beach, Florida, 32951
Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa
 Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
Expression of interest for Transfer of Autonomous Underwater Vehicle Technology, NIO, Goa CONTENTS No Title Page 1 Technology 2 2 Figures and Photos 3 3 Specifications 3 4 Publications and articles related
Polar Research Vessel Operational Requirements and Summary of Technical Studies
 Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Polar Research Vessel Operational Requirements and Summary of Technical Studies Presentation to UNOLS by Jim St John Science and Technology Corporation - Polar Technology Office Why a New Antarctic Research
Noise Experiment #2. Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA February 22 February 2010
 Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
South Bay Coastal Ocean Observing System California Clean Beaches Initiative
 South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report September 2003 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of
South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report September 2003 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of
CALIFORNIA DEPARTMENT OF FISH AND WILDLIFE UPDATE ON LANDINGS OF TUNA, SWORDFISH AND OTHER PELAGICS
 Agenda Item H.2.c Supplemental CDFW Report 1 November 217 CALIFORNIA DEPARTMENT OF FISH AND WILDLIFE UPDATE ON LANDINGS OF TUNA, SWORDFISH AND OTHER PELAGICS CDFW Summary of HMS Landings Data Improvement
Agenda Item H.2.c Supplemental CDFW Report 1 November 217 CALIFORNIA DEPARTMENT OF FISH AND WILDLIFE UPDATE ON LANDINGS OF TUNA, SWORDFISH AND OTHER PELAGICS CDFW Summary of HMS Landings Data Improvement
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys
 MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Cruise Plan for QPE (R/V Revelle Sept/ 12-16, 2009)
") Cruise Plan for QPE (R/V Revelle Sept/ 12-16, 2009) Objectives In this cruise we will recover six subsurface ADCP/TC moorings (Lien), five restrained ADCP (Centurioni), and perform shipboard ADCP, Revelle
Cruise Plan for QPE (R/V Revelle Sept/ 12-16, 2009) Objectives In this cruise we will recover six subsurface ADCP/TC moorings (Lien), five restrained ADCP (Centurioni), and perform shipboard ADCP, Revelle
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
R/V Point Sur Pre-Cruise Questionnaire
 R/V Point Sur Pre-Cruise Questionnaire Please fill this out and return at least 40 days prior to your cruise to ensure that all of your technical needs can be met BASIC INFO Purpose of Cruise: Submitter's
R/V Point Sur Pre-Cruise Questionnaire Please fill this out and return at least 40 days prior to your cruise to ensure that all of your technical needs can be met BASIC INFO Purpose of Cruise: Submitter's
ATON System Workshop
 ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
Acoustic Seaglider for Beaked Whale Detection
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale ion Neil M. Bogue and Jim Luby Applied Physics Laboratory University of Washington
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Acoustic Seaglider for Beaked Whale ion Neil M. Bogue and Jim Luby Applied Physics Laboratory University of Washington
The Great Coastal Gale of 2007 from Coastal Storms Program Buoy 46089
 The Great Coastal Gale of 2007 from Coastal Storms Program Buoy 46089 Richard L. Crout, Ian T. Sears, and Lea K. Locke NOAA National Data Buoy Center 1007 Balch Blvd. Stennis Space Center, MS 39529 USA
The Great Coastal Gale of 2007 from Coastal Storms Program Buoy 46089 Richard L. Crout, Ian T. Sears, and Lea K. Locke NOAA National Data Buoy Center 1007 Balch Blvd. Stennis Space Center, MS 39529 USA
CMORE HOE DYLAN October 2012 Draft cruise plan
 CMORE HOE DYLAN 11 1 4 October 2012 Draft cruise plan Cruise ID: KM12-21 Vessel: R/V KILO MOANA University of Hawaii Master of the Vessel: Captain Gray Drewry Chief Scientist: Tara Clemente (UH) OTG Marine
CMORE HOE DYLAN 11 1 4 October 2012 Draft cruise plan Cruise ID: KM12-21 Vessel: R/V KILO MOANA University of Hawaii Master of the Vessel: Captain Gray Drewry Chief Scientist: Tara Clemente (UH) OTG Marine
TNA PROJECT PRELIMINARY REPORT 1 st Call of Proposals 12 January 3 April, 2012
 TNA PROJECT PRELIMINARY REPORT 1 st Call of Proposals 12 January 3 April, 2012 A) General Information Proposal reference number Project Acronym (ID) Title of the project Host Research Infrastructure CALL_1_12/1210185
TNA PROJECT PRELIMINARY REPORT 1 st Call of Proposals 12 January 3 April, 2012 A) General Information Proposal reference number Project Acronym (ID) Title of the project Host Research Infrastructure CALL_1_12/1210185
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Sea Views SEACAMS. month s edition. In this. Business aboard the RV Prince Madog What do seals do underwater? All aboard the RV Prince Madog
 February 2013 SEACAMS Sea Views In this month s edition Business aboard the RV Prince Madog What do seals do underwater? All aboard the RV Prince Madog 0845 519 9029 www.seacams.ac.uk ebost: email: info@seacams.ac.uk
February 2013 SEACAMS Sea Views In this month s edition Business aboard the RV Prince Madog What do seals do underwater? All aboard the RV Prince Madog 0845 519 9029 www.seacams.ac.uk ebost: email: info@seacams.ac.uk
Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters Vitalii A. Sheremet Graduate School of
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Observations of Near-Bottom Currents with Low-Cost SeaHorse Tilt Current Meters Vitalii A. Sheremet Graduate School of
Marine Renewables Industry Association. Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling
 Marine Renewables Industry Association Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling October 2009 Table of Contents 1. Introduction... 1 2. Measurements
Marine Renewables Industry Association Marine Renewables Industry: Requirements for Oceanographic Measurements, Data Processing and Modelling October 2009 Table of Contents 1. Introduction... 1 2. Measurements
R/V HUGH R. SHARP University of Delaware 2016
 R/V HUGH R. SHARP R/V HUGH R. SHARP University of Delaware 2016 GENERAL DESCRIPTION: The R/V HUGH R. SHARP is an acoustically quiet, state of the art, general-purpose, regional class research vessel operated
R/V HUGH R. SHARP R/V HUGH R. SHARP University of Delaware 2016 GENERAL DESCRIPTION: The R/V HUGH R. SHARP is an acoustically quiet, state of the art, general-purpose, regional class research vessel operated
Sensors and Platforms for Autonomous Undersea Systems
 Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Eric J. Aronchick, B.S. Oceanographic Field Technician
 , B.S. Oceanographic Field Technician EXPERTISE Experienced in conducting offshore shallow, mid, and deep water deployment and recovery operations of oceanographic instrumentation and equipment. Skilled
, B.S. Oceanographic Field Technician EXPERTISE Experienced in conducting offshore shallow, mid, and deep water deployment and recovery operations of oceanographic instrumentation and equipment. Skilled
Air-Sea Interaction Spar Buoy Systems
 DISTRIBUTION STATEMENT A: Distribution approved for public release; distribution is unlimited Air-Sea Interaction Spar Buoy Systems Hans C. Graber CSTARS - University of Miami 11811 SW 168 th Street, Miami,
DISTRIBUTION STATEMENT A: Distribution approved for public release; distribution is unlimited Air-Sea Interaction Spar Buoy Systems Hans C. Graber CSTARS - University of Miami 11811 SW 168 th Street, Miami,
Figure 8: Buoyancy Force and Weight Acting on an Object
 Working in Water 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and operation
Working in Water 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and operation
Testing and Evaluation of REMUS Vehicle Systems
 Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
SEAHORSES and SUBMARINES Testing transformational capabilities with modern UUVs at NAVOCEANO by Craig A. Peterson and Martha E. M.
 SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
Development of tether mooring type underwater robots: Anchor diver I and II
 Indian Journal of Geo-Marine Sciences Vol. 40(2), April 2011, pp. 181-190 Development of tether mooring type underwater robots: Anchor diver I and II Ya-Wen Huang 1, Koji Ueda 1, Kazuhiro Itoh 2, Yuki
Indian Journal of Geo-Marine Sciences Vol. 40(2), April 2011, pp. 181-190 Development of tether mooring type underwater robots: Anchor diver I and II Ya-Wen Huang 1, Koji Ueda 1, Kazuhiro Itoh 2, Yuki
QC for Hydrographic Data GEOSECS to GO-SHIP. Susan M. Becker Scripps Institution of Oceanography Oceanographic Data Facility
 QC for Hydrographic Data GEOSECS to GO-SHIP Susan M. Becker Scripps Institution of Oceanography Oceanographic Data Facility Global Hydrographic Efforts Geo-chemical Ocean Sections (GEOSECS) World Ocean
QC for Hydrographic Data GEOSECS to GO-SHIP Susan M. Becker Scripps Institution of Oceanography Oceanographic Data Facility Global Hydrographic Efforts Geo-chemical Ocean Sections (GEOSECS) World Ocean
Oceanographic Research With The LiquID Station
 Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
voyageplan SS Itinerary Principal Investigator(s) RV Southern Surveyor program
 RV Southern Surveyor program") 2008 RV Southern Surveyor program voyageplan SS04-2008 RESEARCH CHARTER Deep-Ocean Tsunami Detection Buoy (DART) Scheduled Maintenance Replacement for the Australian Tsunami Warning System (ATWS) Itinerary
2008 RV Southern Surveyor program voyageplan SS04-2008 RESEARCH CHARTER Deep-Ocean Tsunami Detection Buoy (DART) Scheduled Maintenance Replacement for the Australian Tsunami Warning System (ATWS) Itinerary
Oceans - Laboratory 12
 Oceans - Laboratory 12 (Name) How do ocean waves form? All waves are disturbances of a fluid medium through which energy is moved (Davis, 1997). Ocean waves travel on the interface between oceans and the
Oceans - Laboratory 12 (Name) How do ocean waves form? All waves are disturbances of a fluid medium through which energy is moved (Davis, 1997). Ocean waves travel on the interface between oceans and the
Cruise Plan, Alford IWISE leg, June 10-20, 2011
 Cruise Plan, Alford IWISE leg, June 10-20, 2011 version 2; dated 5/20/2011 Overview/Objectives The following is the updated cruise plan for the mooring deployment leg (6/10-6/20) of the Internal Waves
Cruise Plan, Alford IWISE leg, June 10-20, 2011 version 2; dated 5/20/2011 Overview/Objectives The following is the updated cruise plan for the mooring deployment leg (6/10-6/20) of the Internal Waves
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
HYDROGRAPHIC AND SITE SURVEY REPORT
 HYDROGRAPHIC AND SITE SURVEY REPORT Proposed Pen Site at Dounie, Sound of Jura Prepared for: Kames Fish Farming Ltd Kilmelford Argyll PA34 4XA Tel: +44 (0)1631 720699 TransTech Limited www.transtechltd.com
HYDROGRAPHIC AND SITE SURVEY REPORT Proposed Pen Site at Dounie, Sound of Jura Prepared for: Kames Fish Farming Ltd Kilmelford Argyll PA34 4XA Tel: +44 (0)1631 720699 TransTech Limited www.transtechltd.com
South Bay Coastal Ocean Observing System California Clean Beaches Initiative
 South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report March 2004 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of California,
South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report March 2004 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of California,
Application for Consent to Conduct Marine Scientific Research. F Internal Waves in Straits (IWISE) Institution Contact Information Director
 Institution Contact Information Director") 1. General Information 1.1 Reference ID: Application for Consent to Conduct Marine Scientific Research Application number: Project name: F2010-111 Internal Waves in Straits (IWISE) 1.2 Sponsoring institution(s):
1. General Information 1.1 Reference ID: Application for Consent to Conduct Marine Scientific Research Application number: Project name: F2010-111 Internal Waves in Straits (IWISE) 1.2 Sponsoring institution(s):
An IOOS Operational Wave Observation Plan Supported by NOAA IOOS Program & USACE
 An IOOS Operational Wave Observation Plan Supported by NOAA IOOS Program & USACE R.E. Jensen, W.A. Birkemeier and W. Burnett JCOMM-Workshop on Wave Measurements from Buoys Wave Information to Application
An IOOS Operational Wave Observation Plan Supported by NOAA IOOS Program & USACE R.E. Jensen, W.A. Birkemeier and W. Burnett JCOMM-Workshop on Wave Measurements from Buoys Wave Information to Application
Remote Monitoring of Dolphins and Whales in the High Naval Activity Areas in Hawaiian Waters
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Remote Monitoring of Dolphins and Whales in the High Naval Activity Areas in Hawaiian Waters Whitlow W. L. Au and Marc
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Remote Monitoring of Dolphins and Whales in the High Naval Activity Areas in Hawaiian Waters Whitlow W. L. Au and Marc
PRELIMINARY CRUISE REPORT, W9909C R/V WECOMA, September 1999 GLOBEC/ENSO Long-Term Observations off Oregon
 Submitted by Jane Fleischbein College of Oceanic & Atmospheric Sciences Oregon State University Corvallis, Oregon 97331-553 flei@oce.orst.edu, 541.737.5698 FILING DATE: 1 October 1999 PRELIMINARY CRUISE
Submitted by Jane Fleischbein College of Oceanic & Atmospheric Sciences Oregon State University Corvallis, Oregon 97331-553 flei@oce.orst.edu, 541.737.5698 FILING DATE: 1 October 1999 PRELIMINARY CRUISE
Large-scale Field Test
 Vaskinn 1 Large-scale Field Test Kjetil Arne Vaskinn kav@trh.statkraftgroner.no Statkraft Grøner AS SUMMARY The objective the controlled failure of large-scale embankment is to monitor and record the failure
Vaskinn 1 Large-scale Field Test Kjetil Arne Vaskinn kav@trh.statkraftgroner.no Statkraft Grøner AS SUMMARY The objective the controlled failure of large-scale embankment is to monitor and record the failure
roaming rates Designers push the envelope to save fuel on long-range motor yachts.
 Reduced roaming rates Designers push the envelope to save fuel on long-range motor yachts. Steven Davis The wise-guy answer to the question, How do you save fuel on a motor yacht? is: You pull back the
Reduced roaming rates Designers push the envelope to save fuel on long-range motor yachts. Steven Davis The wise-guy answer to the question, How do you save fuel on a motor yacht? is: You pull back the
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
The GCOOS Mooring Plan Element Draft, 19 February 2011
 The GCOOS Mooring Plan Element Draft, 19 February 2011 1. Introduction In order to proceed with the establishment of a regional coastal ocean observing system for the Gulf of Mexico, it is essential to
The GCOOS Mooring Plan Element Draft, 19 February 2011 1. Introduction In order to proceed with the establishment of a regional coastal ocean observing system for the Gulf of Mexico, it is essential to
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
IFREMER contribution to POLAR POD project. Olivier Quédec ERVO 2017 Images provided by Jean-Louis Etienne 1
 IFREMER contribution to POLAR POD project Olivier Quédec ERVO 2017 Images provided by Jean-Louis Etienne 1 POLAR POD A project leaded by Dr Jean-Louis Etienne Some expeditions carried out until now ü 1986
IFREMER contribution to POLAR POD project Olivier Quédec ERVO 2017 Images provided by Jean-Louis Etienne 1 POLAR POD A project leaded by Dr Jean-Louis Etienne Some expeditions carried out until now ü 1986
SVP-B drifter built by METOCEAN Use and deployment instructions
 Centre de Meteorologie Marine Tel: +33 2 98 22 18 52 Meteo-France Fax: +33 2 98 22 18 49 13, rue du Chatellier E-mail: Pierre.Blouch@meteo.fr BP 90411 29604 BREST CEDEX France SVP-B drifter built by METOCEAN
Centre de Meteorologie Marine Tel: +33 2 98 22 18 52 Meteo-France Fax: +33 2 98 22 18 49 13, rue du Chatellier E-mail: Pierre.Blouch@meteo.fr BP 90411 29604 BREST CEDEX France SVP-B drifter built by METOCEAN
Advancing Ocean Wave Energy through Research, Development and Testing
 Advancing Ocean Wave Energy through Research, Development and Testing Annette von Jouanne, Ph.D., P.E., IEEE Fellow Electrical Engineering and Computer Science (EECS) Oregon State University Northwest
Advancing Ocean Wave Energy through Research, Development and Testing Annette von Jouanne, Ph.D., P.E., IEEE Fellow Electrical Engineering and Computer Science (EECS) Oregon State University Northwest
Level MEASUREMENT 1/2016
 Level MEASUREMENT 1/2016 AGENDA 2 A. Introduction B. Float method C. Displacer method D. Hydrostatic pressure method E. Capacitance method G. Ultrasonic method H. Radar method I. Laser method J. Level
Level MEASUREMENT 1/2016 AGENDA 2 A. Introduction B. Float method C. Displacer method D. Hydrostatic pressure method E. Capacitance method G. Ultrasonic method H. Radar method I. Laser method J. Level
USA Space Debris Environment, Operations, and Policy Updates
 USA Space Debris Environment, Operations, and Policy Updates Presentation to the 49 th Session of the Scientific and Technical Subcommittee Committee on the Peaceful Uses of Outer Space United Nations
USA Space Debris Environment, Operations, and Policy Updates Presentation to the 49 th Session of the Scientific and Technical Subcommittee Committee on the Peaceful Uses of Outer Space United Nations
Yasuhisa ISHIHARA Marine Technology Center JAMSTEC
 Tsunami Warning Buoy System and an Acoustic Telemetry System for High Current Area Yasuhisa ISHIHARA Marine Technology Center JAMSTEC Contents 1. Large depth Surface Buoy Mooring TRITONBuoyand GlobalTropical
Tsunami Warning Buoy System and an Acoustic Telemetry System for High Current Area Yasuhisa ISHIHARA Marine Technology Center JAMSTEC Contents 1. Large depth Surface Buoy Mooring TRITONBuoyand GlobalTropical
COASTAL & OFFSHORE PACIFIC CORPORATION 242 Rosa Corte Walnut Creek, CA Via
 COASTAL & OFFSHORE PACIFIC CORPORATION 242 Rosa Corte Walnut Creek, CA 94598 925.989.4701 dex1007@sbcglobal.net May 10, 2018 Dr. Kit Dahl Pacific Fisheries Management Council Highly Migratory Species Portland,
COASTAL & OFFSHORE PACIFIC CORPORATION 242 Rosa Corte Walnut Creek, CA 94598 925.989.4701 dex1007@sbcglobal.net May 10, 2018 Dr. Kit Dahl Pacific Fisheries Management Council Highly Migratory Species Portland,
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Sensor Platform Project Marine Trials Bidders Conference. Fundy Ocean Research Center for Energy fundyforce.ca
 Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
Sensor Platform Project Marine Trials Bidders Conference Fundy Ocean Research Center for Energy fundyforce.ca 1 Project Team FORCE OceanWorks International Preliminary Design, Operational Procedures Murray
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
Effects of Offshore Forcing in the Nearshore Environment
 Effects of Offshore Forcing in the Nearshore Environment Geno Pawlak Department of Ocean and Resources Engineering University of Hawaii at Manoa 2540 Dole St., Holmes Hall 402 Honolulu, HI 96822 phone:
Effects of Offshore Forcing in the Nearshore Environment Geno Pawlak Department of Ocean and Resources Engineering University of Hawaii at Manoa 2540 Dole St., Holmes Hall 402 Honolulu, HI 96822 phone:
Mooring Modifications for the Reduction of Losses to Vandalism
 Mooring Modifications for the Reduction of Losses to Vandalism H. Paul Freitag Chris Meinig Andrew J. Shepherd Pacific Marine Environmental Laboratory Seattle, Washington, USA Linda D. Stratton JISAO/University
Mooring Modifications for the Reduction of Losses to Vandalism H. Paul Freitag Chris Meinig Andrew J. Shepherd Pacific Marine Environmental Laboratory Seattle, Washington, USA Linda D. Stratton JISAO/University
AUSTAL WIND EXPRESS SERIES
 WIND EXPRESS SERIES ABOUT AUSTAL AUSTAL WIND EXPRESS SERIES Austal is the world s leading designer and builder of customised, high performance aluminium vessels for both commercial and defence applications
WIND EXPRESS SERIES ABOUT AUSTAL AUSTAL WIND EXPRESS SERIES Austal is the world s leading designer and builder of customised, high performance aluminium vessels for both commercial and defence applications
QUICK START GUIDE CB-950 DATA BUOY PLATFORM
 What s Included (1) Buoy hull with data well, 950 lb buoyancy (1) Buoy tower (3) 40W Solar panels (1) Data well lid (isic-cb or pass-through) (3) Top-side lifting eyes (3) Bottom-side mooring eyes (1)
What s Included (1) Buoy hull with data well, 950 lb buoyancy (1) Buoy tower (3) 40W Solar panels (1) Data well lid (isic-cb or pass-through) (3) Top-side lifting eyes (3) Bottom-side mooring eyes (1)
Technical Guideline No. 06 Deployment of current meter moorings
 Technical Guideline No. 06 Deployment of current meter moorings James Parker and Jon Rees 2014 To be used in conjunction with: GUIDELINES FOR THE ENVIRONMENTAL MONITORING AND IMPACT ASSESSMENT ASSOCIATED
Technical Guideline No. 06 Deployment of current meter moorings James Parker and Jon Rees 2014 To be used in conjunction with: GUIDELINES FOR THE ENVIRONMENTAL MONITORING AND IMPACT ASSESSMENT ASSOCIATED
World Marine Offshore Torskekaj Esbjerg, Denmark
 Vessel Specification Suitable for transfer of crew and cargo to wind indu stry, crew change vessel, survey, ROV, standby rescue and guard duties. The vessel design is a proven concept within support vessels
Vessel Specification Suitable for transfer of crew and cargo to wind indu stry, crew change vessel, survey, ROV, standby rescue and guard duties. The vessel design is a proven concept within support vessels
Surface Tracking Feature
 TELEDYNE RD INSTRUM ENTS A Teledyne Technologies Company Application Note FSA-022 (June 2008) Surface Tracking Feature 1 Introduction The following Application Note serves as a guide of how to use the
TELEDYNE RD INSTRUM ENTS A Teledyne Technologies Company Application Note FSA-022 (June 2008) Surface Tracking Feature 1 Introduction The following Application Note serves as a guide of how to use the
Development and Trials of Deep-set Buoy Gear Off the California Coast
 Development and Trials of Deep-set Buoy Gear Off the California Coast Agenda Item I.1.c Supplemental SWFSC PowerPoint (Chugey Sepulveda) March 2013 PFMC Research Update 2013 Chugey Sepulveda, PhD Scott
Development and Trials of Deep-set Buoy Gear Off the California Coast Agenda Item I.1.c Supplemental SWFSC PowerPoint (Chugey Sepulveda) March 2013 PFMC Research Update 2013 Chugey Sepulveda, PhD Scott
Offshore Wind Energy Stringent quality assurance and quality control. Coastal and Freshwater Fast responding and flexible organisation
 Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,
Services Oceanographic and Positioning Equipment Rental Meteorological and Oceanographic Surveys Data Analysis and Characterisation Marine Energy Resource Assessment Real-Time Monitoring Founded in 2010,