自動レーン変更と自動駐車のためのシミュレーション環境の構築
|
|
|
- Tabitha Banks
- 5 years ago
- Views:
Transcription
1 自動レーン変更と自動駐車のためのシミュレーション環境の構築 豊田工業大学スマートビークル研究センター三田誠一 2016 年 10 月 19 日 1
2 Titles of Contents Introduction Automated Parking Automated Lane Change Platooning Application 2
3 シミュレーション活用の利点 まれにしか発生しない状況の再現ができる データを再現性良く処理できる 環境 パラメータやセンサ種類を自由に設定できる シミュレーション環境から 実環境への適応が簡単にできる 開発アルゴリズムの初期段階での短時間性能検証ができる Application Examples Ontology Car Platooning Car Control Path Planning( Narrow Passage, Parking Model) Stereo Vision System Lane Change Modeling etc. 3


4 Application Examples Grand Truth Generated Depth Ontology Stereo Vision System Narrow Passage Path Planning Maze Path Planning Lane Change Path Planning 4
5 Narrow Passage and Automated Parking Path Planning Application 5
6 Level of Automated Parking General Parking Place Highly Structured Parking Place for Automated Driving Lower Speed Public Road Driving White Line Detection Pedestrian Detection Car Detection etc. Following Indications No Pedestrians, No Cars 6
7 Valet Parking 実環境 Predefined Routes Vehicle with 3D Dynamic Model 7


8 Simple Perception for Environment 視点変化 Driver View Top View 8

9 Subjects for Automated Parking 仮想環境構築 Narrow Passage Passing Obstacle Avoidance 9
10 General Parking Place 10



11 New appear obstacle Local path Intended parking position is occupied New empty space found New paths generated 11
12 Automated Parking Scheme Without pre-determined goal With pre-determined goal Parking area map Generate path from entrance to exit Follow planned path No Found parking position Yes Generate path to parking position Parking area map Update map Sensors data (laser, GPS, odometer ) Real time data Global path planner No Path No Yes Local path planner Path Yes Path follower Stop and Wait 12
13 Automated Parking Planner s Objectives The safety distance of the path from the obstacles The total travel distance of the path. The number of times that the vehicle has to switch the gear from forward to backward and vice versa. The curvature of the path to satisfy the kinematic constraints. N N 1 C( p ) w d( p ) w g( p ) g( p ) i 1 i 2 i i 1 i 1 i 1 N N 1 w p w ( p ) 3 i 4 i 1 i 1 i Closeness to Obstacles Gear Change g = 1: forward g = -1: backward Distance between Path Points Curvature 13


14 Application of Proposed Method for Automated Parking Proposed Parking Path Planning Method: 14

15 Fast Marching Method Introduced by Sethian in 1995* A numerical method for solving boundary value problems of the Eikonal equation: U F = 1 F > 0 :the front moving speed U : the travel time 1/F can also be known as objective cost Starting with an initial position for the front, the method systematically marches the front outwards one grid point at a time. * 15

16 Apply FMM on 2D Grid Map 1 st step: To find: - guiding path - distance from each cell to the goal Left side data Start 2D FMM path Right side data Goal 16

17 Apply SVM to Find Hyperplane and Safety Field 2 nd step: To find: distance to the hyperplane 17
 (x, y) : 2D")
 2D neighbors")

18 Apply FMM to Continuous Search Space 3 rd step: continuous search space (x, y,, g) (x, y) : 2D coordination : vehicle heading angle (g {1,-1} ): driving maneuver (forward or backward) 2D neighbors The neighbors of a node in search space Start 3D continuous search space A path generated after applying FMM 18


19 Experimental Result for Complicated Path Case A Unstructured map with complicated obstacles shapes Hybrid A*and Risk Potential Proposed Method Method H-A*+RP Proposed Method Safety Margin for Obtained Paths (cell) Number of Gear Change 3 1 Average Curvature Average Computation Time (ms)


20 Experimental Result for Real Environment Case B Slam Map of real cluttered environment Hybrid A* and Risk Potential Proposed method Method H-A*+RP Proposed method Safety Margin for Obtained Paths (cell) Number of gear change 4 2 Average curvature Average computation time (ms)
21 Highly Structured Parking Place 21

22 Automated Parking Simulation 22

23 Another View for Parking 23

24 Conventional Camera View 24

25 Fisheye Camera View 25
26 Simulink Block from Parking Experiment

27 Ego Car Sensor Setting Fisheye cameras Ultrasonic sensors
28 Ego Car Simulink Blocks Predifined Path Car dynamic model Car State Trajectory follower Fisheye Cameras Input Data from Ultra Sonic Sensors Path planning and Control
29 Continue ---Ultrasonic sensors Output: Detected Obstacle Corresponding Range and Angle from Sensor Position
30 Ego Car Information Output : Ego Car State: Position in North West Direction, GPS position, Velocity, Yaw-angle
31 Trajectory Follower Input :Pre-defined Path, Car State, Desired Velocity Output: Steering angle, Throttle and Brake Control
32 Longitudinal Controller Trajectory Follower Block Lateral Controller
33 Car Controller Dynamic Model Input :Control Command Output :Simulated Ego Car State

34 Inside Car Dynamic Model
35 Path Planning and Control - Sensors Data Processing - Path planning - Car Control (Steering Wheel Angle, Velocity, Gear )
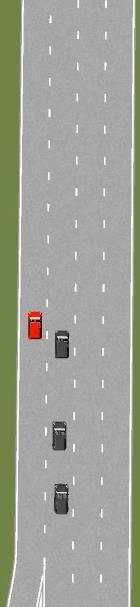
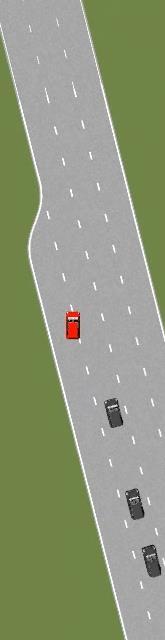
36 Distance Constraint Model for Automated Lane Change to Merge and Exit 36
37 Titles of Contents Why Automated Lane Change Related Work Lane Change Model Two Segments Lane Change Modeling Behavior Generation Model and Selection Motion Generation Model Simulation Results Comparison with Human Driver 37


38 Why Automated Lane Change? ADAS/Semi Automated Driving/ Automated Driving Overtake Obstacles of Low Speed Moving Objects Fast Vehicle Distance Keeping Lane Departure Warning RADAR Sensor Merge or Exits to Highway Lane Change Assistant 38

![Nishiwaki et al., 2010] Risk Assessment [D.](/docs-images/88/117247838/images/39-1.jpg "Althoff, et al.")
39 Related Works State Transition Model Bayesian Network [D. Kasper et al., 2012] Hidden Markov Model [Y. Nishiwaki et al., 2010] Risk Assessment [D. Althoff, et al., 2012] Collision Estimation Based on Trajectories 39







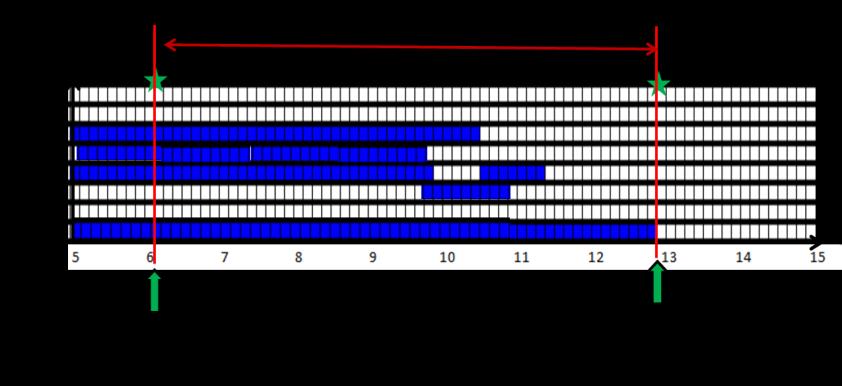
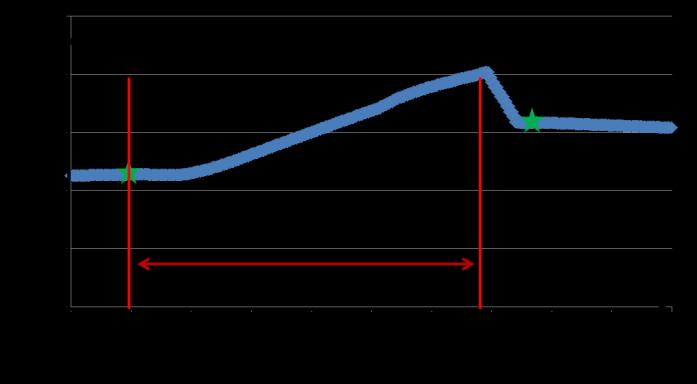
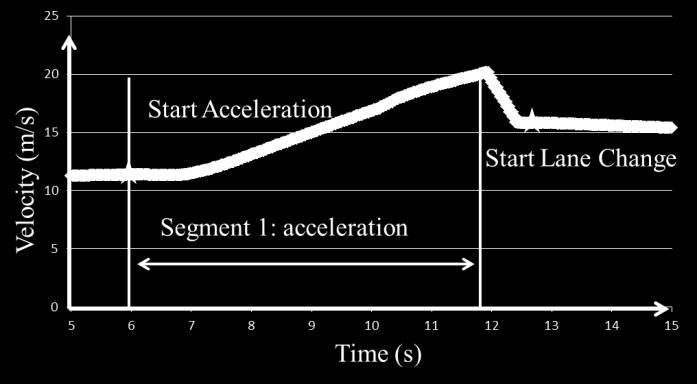
40 Lane Change Model- Learn from Human Driver Human Lane Change Data Lane Change Experiment Two Segments Lane Change Model host vehicle Two Segments Model: 1- Segment 1 (Behavior Segment) Make Safe Space and Time Gap Deceleration to make free space/time for lane change Lane change and accelerate to adjust speed turning the steering wheel 2- Segment 2 (Motion Segment ) Smooth and Comfort Lane Change Segment 1 Segment 2 40






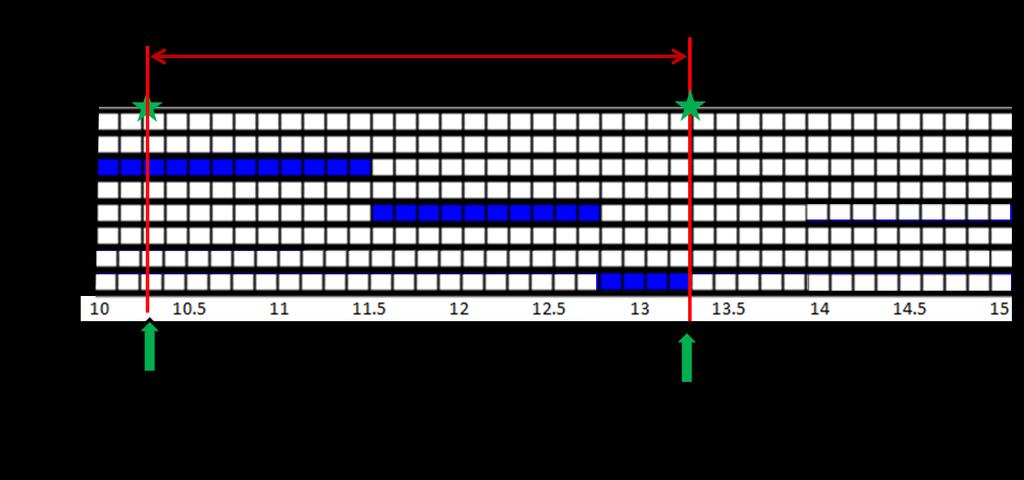
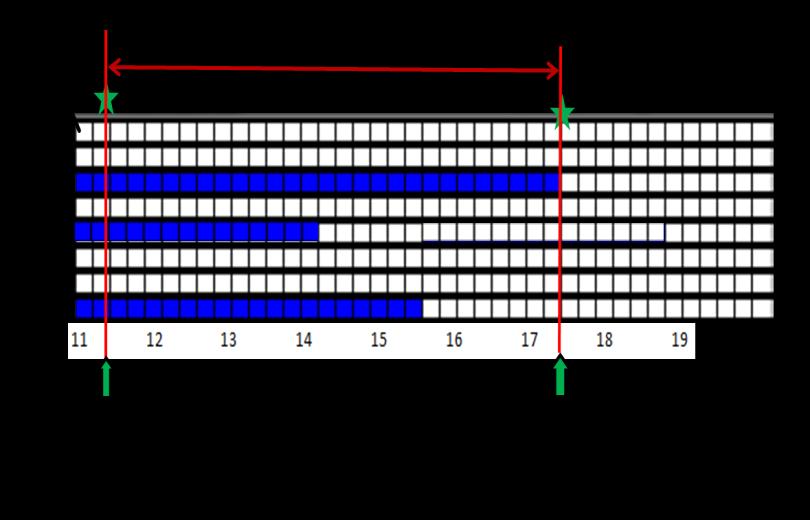
41 Situation Modelling & Estimation Lane change situation is modelled into a state occupancy grid with different size Most Critical Cell Occupied Estimation of Neighboring Vehicle Trajectory dback dfront dfront d min max{ v dback d' min max{ v ego back v v front ego,0} Time,0} Time Merge in and Exit Lane LC LC 41

42 Alternative Behaviors for Segment 1 (Behavior) Available Behaviors for Lane Change 1- Accelerate 2- Wait 3- Lane Change 1- Accelerate 2- Decelerate 3- Lane Change 4- Wait 1- accelerate 2- decelerate 3- lane change 4- wait 1- accelerate 2- lane change 3- wait 1- accelerate 2- wait 3- lane change 1- accelerate 2- wait 3- lane change 1- accelerate 2- decelerate 3- lane change 4- wait 1- decelerate 2- lane change 1- decelerate 2- lane change 3- wait 1- decelerate 2- lane change 3- wait 1-decelerate 2- wait 3- lane change 1-decelerate 2- wait 3- lane change 42
43 Alternative Behavior for Lane Change Behavior A : Lane change with current speed Velocity Lateral acc (m/s 2 ) T A T C Behavior C Behavior A Behavior B Time T B Time Behavior B: Lane change with deceleration Behavior C: Lane change with acceleration Behavior D: Wait Behavior A Behavior C Behavior B 43
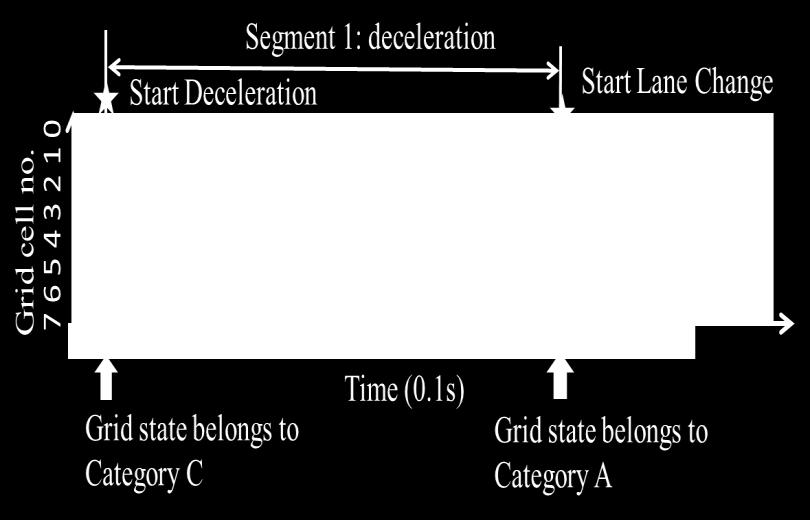
44 Category Classification for Lane Change 1- accelerate 2- decelerate 3- wait 1- accelerate 2- wait 1- accelerate 2- decelerate 3- wait 1- accelerate 2- wait 1- accelerate 2- decelerate 3- lane change 4- wait Category A 1- accelerate 2- decelerate 3- lane change 4- wait Lane change 1- accelerate 2- lane change 3- wait 1- accelerate 2- decelerate 3- lane change 4- wait 1- decelerate 2- wait 1- decelerate 2- wait 1- accelerate 2- decelerate 3- wait 1- accelerate 2- wait 1- accelerate 2- wait 3- lane change 1- accelerate 2- wait 3- lane change 1- accelerate 2- wait 3- lane change 1- decelerate 2- lane change 1- decelerate 2- wait 1- accelerate 2- wait 1- decelerate 2- wait 1- decelerate 2- wait Category C 1- decelerate 2- lane change 3- wait 1- decelerate 2- lane change 3- wait 1-decelerate 2- wait 3- lane change 1-decelerate 2- wait 3- lane change Category B Category D Wait 44
45 Behavior Selection for Segment 1 Velocity Alternative 1: Accelerate and Lane Change Alternative 1: Accelerate and Lane Change dexit t min (meter) dexit t max (meter) Alternative 2: Decelerate and Lane Change Alternative 2: Decelerate and Lane Change T 1 T 2 Time For situation that has more than one behavior option Evaluation function for different action a = {acc, decc, wait} T J(a) = w jerk න ഺx 2 t + w safety (a) + w operationtime T(a) 0 Longitudinal Jerk Safety Time 45
46 Velocity Planning Acceleration Case : t 0 v(t 0 ) T Safety reserve v(t) r x(t 0 ) x lead (t 0 ) v lead (t 0 ) v lead (T) x(t) X Acceleration: x ሷ = f(x(t 0 ), v(t 0 ), x lead (t 0 ), v lead (t 0 ), T, r) Safety reserve: r = d min + TTR v lead (T) TTR: Time To React Error of the safety distance: Cost function: d t = x lead (t) r + t v lead t x(t) t 0 +T J = න (ω dist d t 2 + ω acc [ x(t)] ሷ 2 )dt Constraint: t 0 x T < L; x(t) ሷ < xሷ max Distance Constraint 46
47 Flowchart for Lateral Motion Generation-Segment 2 Lane Change is OK Making Alternative Trajectories v 1 v 2 Lane information Estimate Trajectory Position and speed of surrounding vehicle Cost Function Generate Alternative lateral trajectories Check collisions and find collision free Select Minimum cost function Send to path follower For execution Select Minimum Cost v 3 v 5 0 v h d t 1 time t 2 v 1 v 2 v 3 v 5 Minimum Cost Path t i C = න ഺy 2 t. dt + Δt i + κ t i k 2 d + න t i 1 lateral jerk heading error t i t i 1 κƴ 2 t dt smoothness 47
48 Automated Lane Change Flow Chart Image Sensor Laser Scanner / Radar Estimate Speed/Position of Neighboring Vehicles Estimate the Behavior of Neighboring Vehicles Lane Information Behavior A Segment 1: Do Lane Change Behavior B Segment 1: Wait Segment 2: Lane Change Generate Lateral/Longitudinal Trajectory for Neighboring Vehicles Make Grid Map Evaluation of Different Behaviors Set of Alternative Behaviors Behavior Selection Criteria's Generate Acceleration/ Deceleration/ Wait Patterns for Segment 1 Real Time Control & Execution Time buffer for re-evaluation (every timestamp: t milliseconds) Execution and Control Behavior C Segment 1: Accelerate Segment 2: Lane Change Behavior D Segment 1: Decelerate Segment 2: Lane Change Behavior A is Selected? yes no Generate Motion for Segment 2 Real time Environment Assessment 48


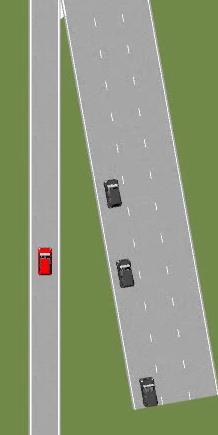
49 Automated Lane Change Simulation Design and Implement Automated lane Change Simulation and Evaluation Environment Designed Modules 1- Adaptive Grid Generation 2- Estimate Surrounding Vehicles Trajectory 3- Check the Collision Avoidance 4- Automated Behavior Generation 5- Automated Lateral/Longitudinal Motion Generation 6- Lane Detection Module 7- Automated Lane Change Scenario Generation PreScan Simulation Platform 8- Control Steering and Acceleration 9-3D Graphic Simulator Simulink Model Flow diagram 49

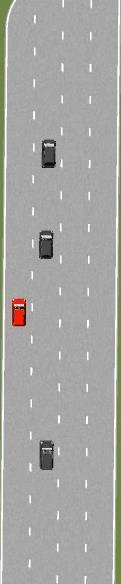
50 Exiting with Acceleration Behavior Observation Grid Velocity Profile Clip 50

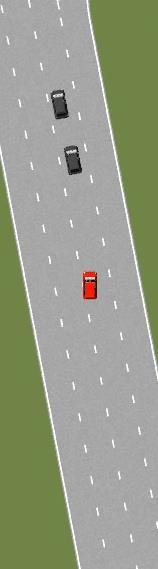

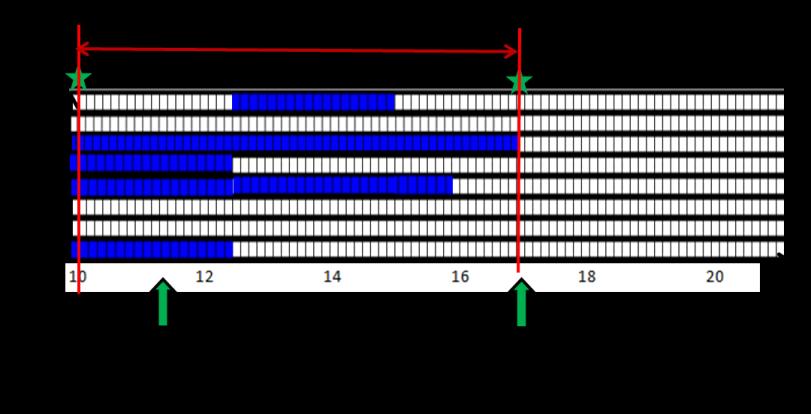
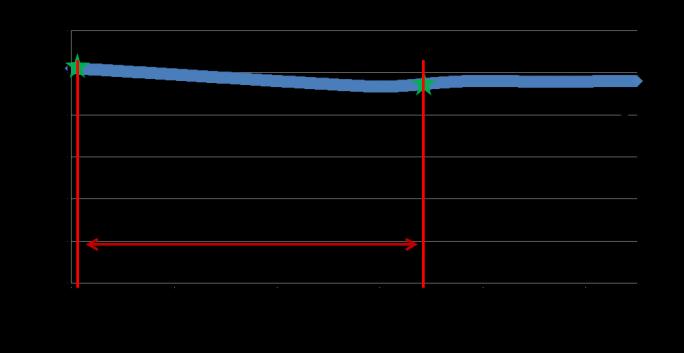
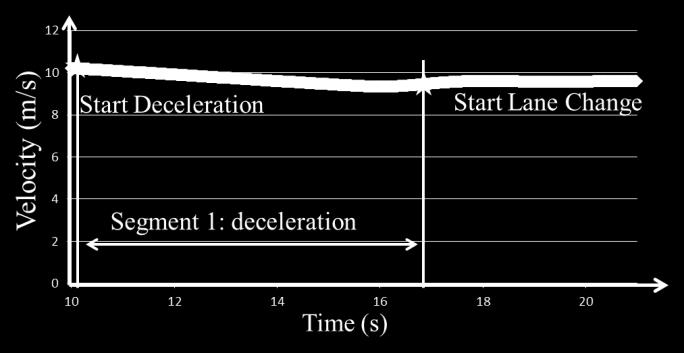

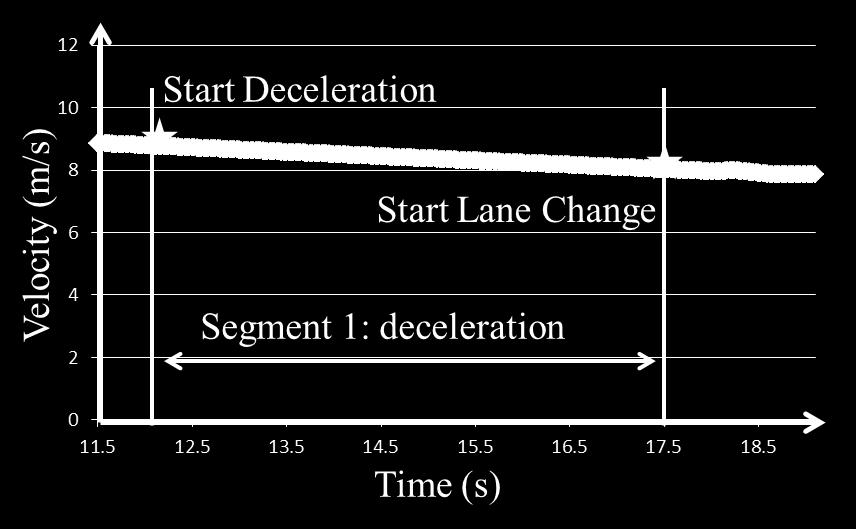
51 Exiting with Deceleration Behavior t=0, start Observation Grid Segment 1: decelerate Segment 2: lane change Exit Velocity Profile Clip 51

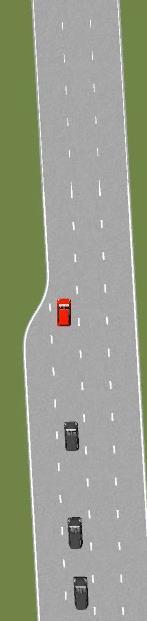

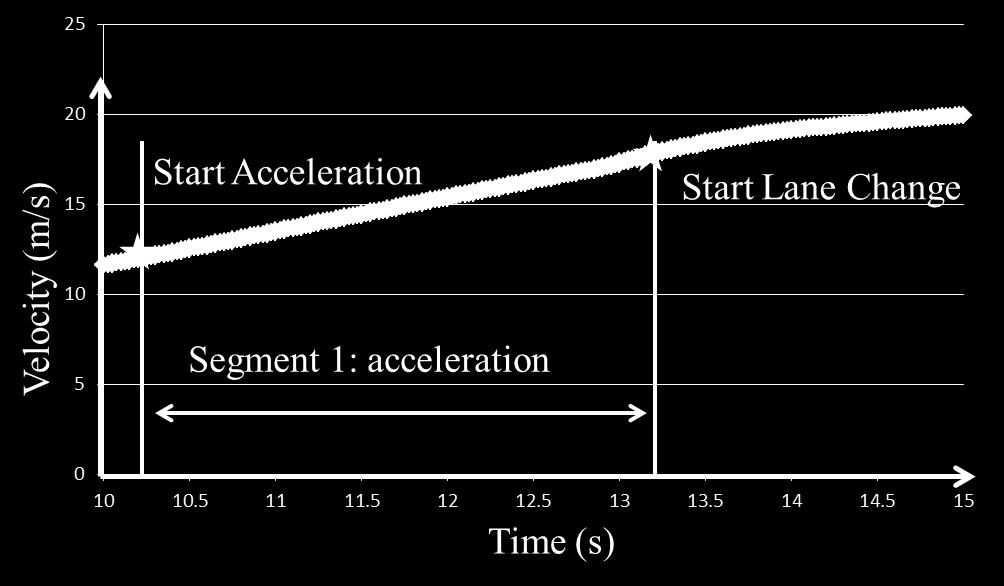

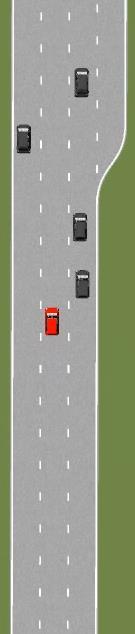
52 Merging in with Acceleration Behavior Merging in with Acceleration Behavior Observation Grid t=0, start Segment 1: accelerate Segment 2: lane change Velocity Profile Merge Clip 52

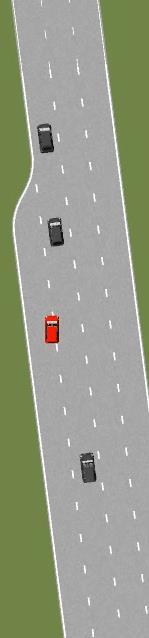
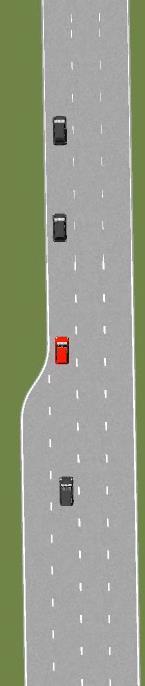
53 Merging with Deceleration Behavior t=0, start Observation Grid Segment 1: decelerate Segment 2: lane change Merge Velocity Profile Clip 53



 Algorithms")
 Comparison")
54 Evaluation and Comparison with Expert Driver Lane Change Experiments Expert Driver Data Extraction - Lateral & Longitudinal Motion - x, ሶ x, ሷ y, ሶ yሷ - Lane information - Surrounding vehicle dx, dx, ሶ y Simulation(PreScan) Algorithms Behavior Model Simulation(PreScan) Comparison and Evaluation Motion Plan Feedback Human Computer 54

![949) V=67[km/h] Surrounding Vehicle Driving Lane](/docs-images/88/117247838/images/55-1.jpg "Tracker y 3.5[m] x (-5.89, -6.")
55 Expert Driver - Data Extraction Velodyne Laser Map (18.798, ) V=67[km/h] Surrounding Vehicle Driving Lane Tracker y 3.5[m] x (-5.89, -6.86) V=96[km/h] Host vehicle V=54[km/h] 2.0[m] 1.5[m] (-21.3, ) V=70[km/h] 55



56 Experiment Results Make Environment In PreScan Expert Driver Experiment Data Behavior and Motion Generation Generate Alternative Lateral Trajectories Check Collisions and Find Collision-free Select Minimum Cost Function Simulation of Real Traffic 56
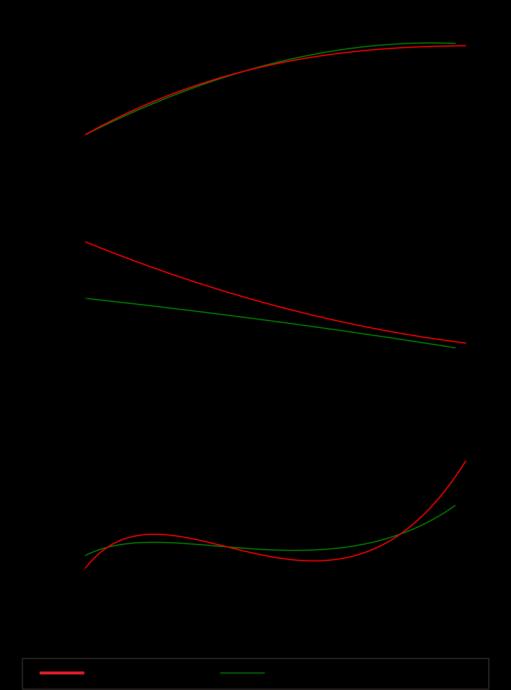
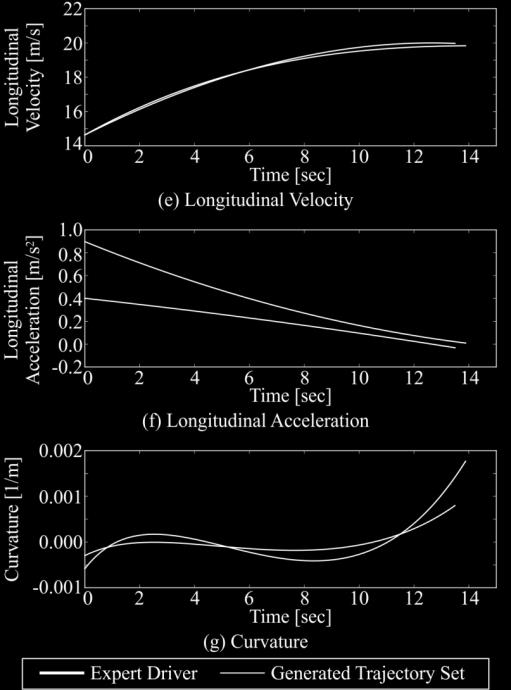
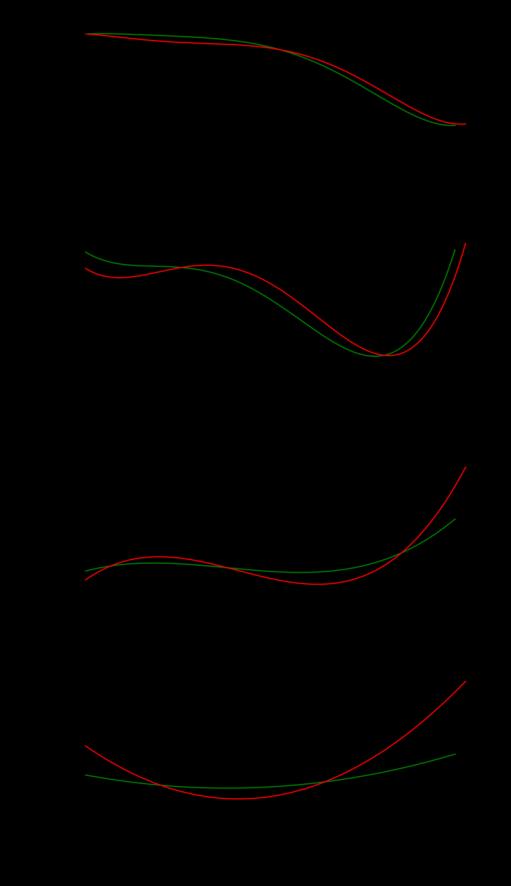
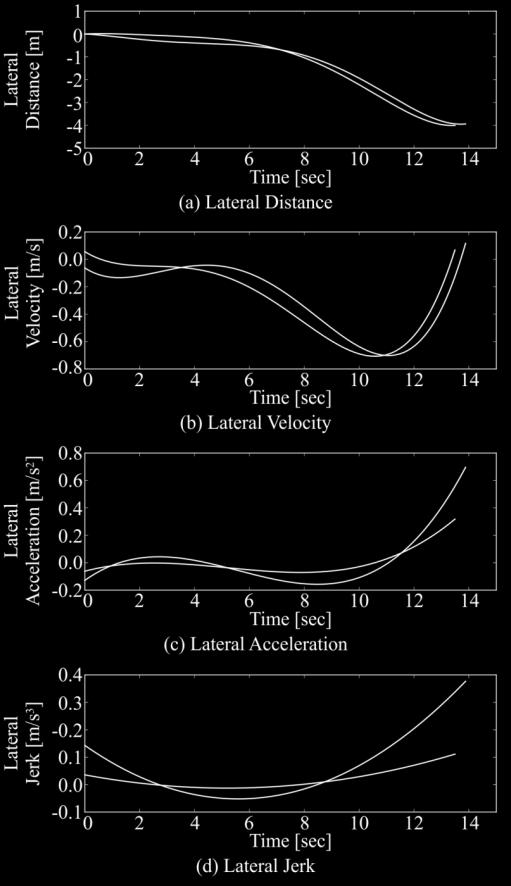
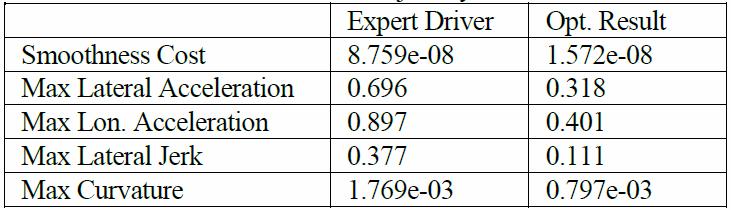
57 Trajectory Evaluation 57
58 Platooning Application 58

59 Self-Defensive Maneuvering 59

60 Simulations Simulator PreScan Control strategy Longitudinal: PID Lateral: Steering angle 60

61 Result Rows: longitudinal, lateral, heading angle Columns: 1 st, 2 nd, 3 rd, 4 th platoon cars and the interfering car. 61
62 Simulation Result 62
63 Thank You for Your Attention! 63
2011 年東北地方太平洋沖地震の強震動生成のための震源モデル (2011 年 8 月 17 日修正版 )
") 2011 年東北地方太平洋沖地震の強震動生成のための震源モデル (2011 年 8 月 17 日修正版 ) Source Model for Generating Strong Ground Motions during the 11 March 2011 off Tohoku,Japan Earthquake (Revised on August 17, 2011) 入倉孝次郎 倉橋奨愛知工業大学地域防災研究センター
2011 年東北地方太平洋沖地震の強震動生成のための震源モデル (2011 年 8 月 17 日修正版 ) Source Model for Generating Strong Ground Motions during the 11 March 2011 off Tohoku,Japan Earthquake (Revised on August 17, 2011) 入倉孝次郎 倉橋奨愛知工業大学地域防災研究センター
Collision Avoidance based on Camera and Radar Fusion. Jitendra Shah interactive Summer School 4-6 July, 2012
 Collision Avoidance based on Camera and Radar Fusion Jitendra Shah interactive Summer School 4-6 July, 2012 Agenda Motivation Perception requirements for collision avoidance Situation classification and
Collision Avoidance based on Camera and Radar Fusion Jitendra Shah interactive Summer School 4-6 July, 2012 Agenda Motivation Perception requirements for collision avoidance Situation classification and
AutonoVi-Sim: Modular Autonomous Vehicle Simulation Platform Supporting Diverse Vehicle Models, Sensor Configuration, and Traffic Conditions
 AutonoVi-Sim: Modular Autonomous Vehicle Simulation Platform Supporting Diverse Vehicle Models, Sensor Configuration, and Traffic Conditions Andrew Best, Sahil Narang, Lucas Pasqualin, Daniel Barber, Dinesh
AutonoVi-Sim: Modular Autonomous Vehicle Simulation Platform Supporting Diverse Vehicle Models, Sensor Configuration, and Traffic Conditions Andrew Best, Sahil Narang, Lucas Pasqualin, Daniel Barber, Dinesh
発育発達と Scammon の発育曲線. Scammon s Growth Curve & Growth and Development. Abstract. Katsunori FUJII
 ,. 総説 発育発達と Scammon の発育曲線 Scammon s Growth Curve & Growth and Development Katsunori FUJII Abstract Eighty years have passed since Scammon proposed the growth curve and even today it continues to be used
,. 総説 発育発達と Scammon の発育曲線 Scammon s Growth Curve & Growth and Development Katsunori FUJII Abstract Eighty years have passed since Scammon proposed the growth curve and even today it continues to be used
川のながれ River Flows. Outline
 River Eng. By Hosoda, T. 川のながれ River Flows 1. Classification of river flows (free surface flows in open channels) Sub-critical vs Super-critical, Stable or Unstable 流れの分類 ( 常流 射流, 安定 不安定 ) 2. Enjoy watching
River Eng. By Hosoda, T. 川のながれ River Flows 1. Classification of river flows (free surface flows in open channels) Sub-critical vs Super-critical, Stable or Unstable 流れの分類 ( 常流 射流, 安定 不安定 ) 2. Enjoy watching
Rapid Estimation of Water Content of Sour Natural Gases
 70 Journal of the Japan Petroleum Institute, 5, (5), 70-74 (009) [Research Note] Rapid Estimation of Water Content of Sour Natural Gases Alireza Bahadori 1)*, Hari B. Vuthaluru 1), and Saeid Mokhatab )
70 Journal of the Japan Petroleum Institute, 5, (5), 70-74 (009) [Research Note] Rapid Estimation of Water Content of Sour Natural Gases Alireza Bahadori 1)*, Hari B. Vuthaluru 1), and Saeid Mokhatab )
v.s. (GW) USD ( 07)/Wp 0.6 USD/Wp 1.8 MW
 USD ( 07)/Wp 0.6 USD/Wp 1.8 MW") 3 2 4 5 v.s. GW 65 55 45 35 25 15 4 3 2 5-5 21 22 23 24 25 26 27 28 29 21 211 212 213 214 215 1 Data from: GWEA, IAEA, Photon, Pla4s, 5 1965 197 1975 198 1985 199 1995 2 25 21 7 5, 45, 4, 35, 3, 25, 2,
3 2 4 5 v.s. GW 65 55 45 35 25 15 4 3 2 5-5 21 22 23 24 25 26 27 28 29 21 211 212 213 214 215 1 Data from: GWEA, IAEA, Photon, Pla4s, 5 1965 197 1975 198 1985 199 1995 2 25 21 7 5, 45, 4, 35, 3, 25, 2,
平成 29 年度金沢学院大学入学試験問題 3 月 17 日 ( 金 ) Ⅰ 注意事項解答用紙に 英語 と記入 マークしてから解答してください 問題は1ページから8ページまであります 問題は持ち帰ってもよいですが コピーして配布 使用するのは法律で禁じられています
 Ⅰ 注意事項解答用紙に 英語 と記入 マークしてから解答してください 問題は1ページから8ページまであります 問題は持ち帰ってもよいですが コピーして配布 使用するのは法律で禁じられています") 3 月 17 日 ( 金 ) 平成 29 年度金沢学院大学入学試験問題 ( 一般入試 Ⅲ 期 ) 英 語 Ⅰ 注意事項解答用紙に 英語 と記入 マークしてから解答してください 問題は1ページから8ページまであります 問題は持ち帰ってもよいですが コピーして配布 使用するのは法律で禁じられています Ⅱ 解答上の注意解答は 解答用紙の解答欄にマークしてください 例えば 10 と表示のある問いに対して4と解答する場合は
3 月 17 日 ( 金 ) 平成 29 年度金沢学院大学入学試験問題 ( 一般入試 Ⅲ 期 ) 英 語 Ⅰ 注意事項解答用紙に 英語 と記入 マークしてから解答してください 問題は1ページから8ページまであります 問題は持ち帰ってもよいですが コピーして配布 使用するのは法律で禁じられています Ⅱ 解答上の注意解答は 解答用紙の解答欄にマークしてください 例えば 10 と表示のある問いに対して4と解答する場合は
1 前提となる背景的事実や出来事について答えることが難しい 2 前提となる背景的事実や出来事について答えることができる 2 前提 発問 3 中心の命題 ( イイタイコト ) について答えることができる 3 命題 発問 4 背後の理由や詳細情報などの展開について答えることができる 4 展開 発問
 について答えることができる 3 命題 発問 4 背後の理由や詳細情報などの展開について答えることができる 4 展開 発問") 本文理解の深さを問う発問活動 ( 各パート Q&A 活動 )Can-Do 尺度例 教科書本文を読んで 本文の流れを踏まえて重要な内容を理解することができる 1 前提となる背景的事実や出来事について答えることが難しい 2 前提となる背景的事実や出来事について答えることができる 2 前提 発問 3 中心の命題 ( イイタイコト ) について答えることができる 3 命題 発問 4 背後の理由や詳細情報などの展開について答えることができる
本文理解の深さを問う発問活動 ( 各パート Q&A 活動 )Can-Do 尺度例 教科書本文を読んで 本文の流れを踏まえて重要な内容を理解することができる 1 前提となる背景的事実や出来事について答えることが難しい 2 前提となる背景的事実や出来事について答えることができる 2 前提 発問 3 中心の命題 ( イイタイコト ) について答えることができる 3 命題 発問 4 背後の理由や詳細情報などの展開について答えることができる
Sensing and Modeling of Terrain Features using Crawling Robots
 Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
Czech Technical University in Prague Sensing and Modeling of Terrain Features using Crawling Robots Jakub Mrva 1 Faculty of Electrical Engineering Agent Technology Center Computational Robotics Laboratory
BHATNAGAR. Reducing Delay in V2V-AEB System by Optimizing Messages in the System
 Reducing Delay in V2V-AEB System by Optimizing Messages in the System Shalabh Bhatanagar Stanley Chien Yaobin Chen TASI, IUPUI, Indianapolis USA Paper Number: 17-0330 ABSTRACT In V2V-AEB (Vehicle to Vehicle
Reducing Delay in V2V-AEB System by Optimizing Messages in the System Shalabh Bhatanagar Stanley Chien Yaobin Chen TASI, IUPUI, Indianapolis USA Paper Number: 17-0330 ABSTRACT In V2V-AEB (Vehicle to Vehicle
自動運転に関するいくつかの論点 ー SAE J3016(2016 年版 ) を中心にー 筑波大学副学長 理事 稲垣敏之.
 を中心にー 筑波大学副学長 理事 稲垣敏之.") 自動車技術会第 4 回自動運転委員会 2016 年 12 月 21 日 自動運転に関するいくつかの論点 ー SAE J3016(2016 年版 ) を中心にー 筑波大学副学長 理事 稲垣敏之 inagaki.toshiyuki.gb@u.tsukuba.ac.jp http://www.css.risk.tsukuba.ac.jp SAE J3016 (2014 年版 ) SAE J3016 (2016
自動車技術会第 4 回自動運転委員会 2016 年 12 月 21 日 自動運転に関するいくつかの論点 ー SAE J3016(2016 年版 ) を中心にー 筑波大学副学長 理事 稲垣敏之 inagaki.toshiyuki.gb@u.tsukuba.ac.jp http://www.css.risk.tsukuba.ac.jp SAE J3016 (2014 年版 ) SAE J3016 (2016
Development of Sirocco Fan Featuring Dragonfly Wing Characteristics
 Development of Sirocco Fan Featuring Dragonfly Wing Characteristics トンボの翅形状を応用したシロッコファンの開発 Yui Kumon* Masaki Ohtsuka* Sharp Co. has developed high-performance electric fans by applying features of the
Development of Sirocco Fan Featuring Dragonfly Wing Characteristics トンボの翅形状を応用したシロッコファンの開発 Yui Kumon* Masaki Ohtsuka* Sharp Co. has developed high-performance electric fans by applying features of the
Situations that a B2/ALKS highway system may encounter
 Submitted by Industry Informal Document - ACSF-20-05 Situations that a B2/ALKS highway system may encounter Purpose and key messages of this document: This document aims at providing a better understanding
Submitted by Industry Informal Document - ACSF-20-05 Situations that a B2/ALKS highway system may encounter Purpose and key messages of this document: This document aims at providing a better understanding
Pedestrian Behaviour Modelling
 Pedestrian Behaviour Modelling An Application to Retail Movements using Genetic Algorithm Contents Requirements of pedestrian behaviour models Framework of a new model Test of shortest-path model Urban
Pedestrian Behaviour Modelling An Application to Retail Movements using Genetic Algorithm Contents Requirements of pedestrian behaviour models Framework of a new model Test of shortest-path model Urban
if all agents follow RSS s interpretation then there will be zero accidents.
 RSS Concept RSS - Mobileye SFF - Nvidia Safety Goal Guaranteeing that an agent will never be involved in an accident is impossible. Hence, our ultimate goal is to guarantee that an agent will be careful
RSS Concept RSS - Mobileye SFF - Nvidia Safety Goal Guaranteeing that an agent will never be involved in an accident is impossible. Hence, our ultimate goal is to guarantee that an agent will be careful
Certificate of Accreditation
 PERRY JOHNSON LABORATORY ACCREDITATION, INC. Certificate of Accreditation Perry Johnson Laboratory Accreditation, Inc. has assessed the Laboratory of: AIR WATER INC. Analysis Center Operations Management
PERRY JOHNSON LABORATORY ACCREDITATION, INC. Certificate of Accreditation Perry Johnson Laboratory Accreditation, Inc. has assessed the Laboratory of: AIR WATER INC. Analysis Center Operations Management
人の認知 判断の特性と限界を考慮した 自動走行システムと法制度の設計
 慶應義塾大学システムデザイン マネジメント研究科 SDM 特別講義 2017 年 1 月 13 日 人の認知 判断の特性と限界を考慮した 自動走行システムと法制度の設計 ー人に優しい自動運転の実現に向けてー 筑波大学副学長 理事 稲垣敏之 inagaki.toshiyuki.gb@u.tsukuba.ac.jp http://www.css.risk.tsukuba.ac.jp 代表的な ASV 技術
慶應義塾大学システムデザイン マネジメント研究科 SDM 特別講義 2017 年 1 月 13 日 人の認知 判断の特性と限界を考慮した 自動走行システムと法制度の設計 ー人に優しい自動運転の実現に向けてー 筑波大学副学長 理事 稲垣敏之 inagaki.toshiyuki.gb@u.tsukuba.ac.jp http://www.css.risk.tsukuba.ac.jp 代表的な ASV 技術
A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data
 A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data Ting Fu Supervisor: Luis Miranda-Moreno, Nicolas Saunier Ting FU Outline 1. Motivation & Literature Review
A Novel Approach to Evaluate Pedestrian Safety at Unsignalized Crossings using Trajectory Data Ting Fu Supervisor: Luis Miranda-Moreno, Nicolas Saunier Ting FU Outline 1. Motivation & Literature Review
Traffic Safety in Japan
 Traffic Safety in Japan National Institute for Land and Infrastructure Management (NILIM) Ministry of Land, Infrastructure, Transport and Tourism (MLIT), JAPAN Contents 1. History of Road Safety in Japan
Traffic Safety in Japan National Institute for Land and Infrastructure Management (NILIM) Ministry of Land, Infrastructure, Transport and Tourism (MLIT), JAPAN Contents 1. History of Road Safety in Japan
Impact of Building Layouts on Wind Turbine Power Output in the Built Environment: A Case Study of Tsu City
 Journal of the Japan Institute of Energy, 94, 315-322(2014) 315 Special Articles: Sustainable Energy Technologies 特集 : 持続可能なエネルギー技術 Impact of Building Layouts on Wind Turbine Power Output in the Built
Journal of the Japan Institute of Energy, 94, 315-322(2014) 315 Special Articles: Sustainable Energy Technologies 特集 : 持続可能なエネルギー技術 Impact of Building Layouts on Wind Turbine Power Output in the Built
Summary Pacific Consultants Co., Ltd.
 "Cross-ministerial Strategic Innovation Promotion Program (SIP) Automated Driving for Universal Services" Research on the demonstration experiments of the Advanced Rapid Transit Summary Pacific Consultants
"Cross-ministerial Strategic Innovation Promotion Program (SIP) Automated Driving for Universal Services" Research on the demonstration experiments of the Advanced Rapid Transit Summary Pacific Consultants
Survey on Professional Baseball
 Survey on Professional Baseball Corporate Communications Department Nomura Research Institute, Ltd. December 22, 2004 0 Purpose of Survey Japanese professional baseball has been rocked severely during
Survey on Professional Baseball Corporate Communications Department Nomura Research Institute, Ltd. December 22, 2004 0 Purpose of Survey Japanese professional baseball has been rocked severely during
National Diet Library 2011
 National Diet Library 2011 Launching New Services and Building the Digital Archive of the Great East Japan Earthquake 1- Organizational Restructuring 2- The NDL updates its services in January 2012 3-
National Diet Library 2011 Launching New Services and Building the Digital Archive of the Great East Japan Earthquake 1- Organizational Restructuring 2- The NDL updates its services in January 2012 3-
Evaluation of the ACC Vehicles in Mixed Traffic: Lane Change Effects and Sensitivity Analysis
 CALIFORNIA PATH PROGRAM INSTITUTE OF TRANSPORTATION STUDIES UNIVERSITY OF CALIFORNIA, BERKELEY Evaluation of the ACC Vehicles in Mixed Traffic: Lane Change Effects and Sensitivity Analysis Petros Ioannou,
CALIFORNIA PATH PROGRAM INSTITUTE OF TRANSPORTATION STUDIES UNIVERSITY OF CALIFORNIA, BERKELEY Evaluation of the ACC Vehicles in Mixed Traffic: Lane Change Effects and Sensitivity Analysis Petros Ioannou,
Self-Driving Vehicles That (Fore) See
 See") Self-Driving Vehicles That (Fore) See Dariu M. Gavrila Intelligent Vehicles, TU Delft Berlin Tech.AD, March 5, 2018 Personal Introduction: Dariu M. Gavrila Born in Cluj (Romania) 1990 Doktoraal Degree
Self-Driving Vehicles That (Fore) See Dariu M. Gavrila Intelligent Vehicles, TU Delft Berlin Tech.AD, March 5, 2018 Personal Introduction: Dariu M. Gavrila Born in Cluj (Romania) 1990 Doktoraal Degree
Preliminary report on west-to-south movement rate of juvenile southern bluefin tuna determined by acoustic tagging in Western Australia
 Preliminary report on west-to-south movement rate of juvenile southern bluefin tuna determined by acoustic tagging in Western Australia 2009-10 Ryo Kawabe 1 Alistair J. Hobday 2 Tomoyuki Itoh 3 Ko Fujioka
Preliminary report on west-to-south movement rate of juvenile southern bluefin tuna determined by acoustic tagging in Western Australia 2009-10 Ryo Kawabe 1 Alistair J. Hobday 2 Tomoyuki Itoh 3 Ko Fujioka
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs
 Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING
 OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING Erich Ramschak Dr. Jürgen Holzinger Erik Bogner AVL List GmbH erich.ramschak@avl.com ConCar-Forum Berlin 5.-6.July 2017
OBJECTIFICATION TECHNOLOGY OF PERCEIVED SAFETY & COMFORT DURING ASSISTED DRIVING Erich Ramschak Dr. Jürgen Holzinger Erik Bogner AVL List GmbH erich.ramschak@avl.com ConCar-Forum Berlin 5.-6.July 2017
Traffic Management using Moving Light Guide System. Hiroyuki Oneyama Tokyo Metropolitan University July 8, 2017
 1 Traffic Management using Moving Light Guide System Hiroyuki Oneyama Tokyo Metropolitan University July 8, 2017 80 km/h Speed control of Drivers using Dynamic Blink Control of the Light-Emitting Devices
1 Traffic Management using Moving Light Guide System Hiroyuki Oneyama Tokyo Metropolitan University July 8, 2017 80 km/h Speed control of Drivers using Dynamic Blink Control of the Light-Emitting Devices
Traffic circles. February 9, 2009
 Traffic circles February 9, 2009 Abstract The use of a traffic circle is a relatively common means of controlling traffic in an intersection. Smaller Traffic circles can be especially effective in routing
Traffic circles February 9, 2009 Abstract The use of a traffic circle is a relatively common means of controlling traffic in an intersection. Smaller Traffic circles can be especially effective in routing
Development and Evaluations of Advanced Emergency Braking System Algorithm for the Commercial Vehicle
 Development and Evaluations of Advanced Emergency Braking System Algorithm for the Commercial Vehicle Taeyoung, Lee Kyongsu, Yi School of Mechanical and Aerospace Engineering, Seoul National University
Development and Evaluations of Advanced Emergency Braking System Algorithm for the Commercial Vehicle Taeyoung, Lee Kyongsu, Yi School of Mechanical and Aerospace Engineering, Seoul National University
Company Profile カルソニックカンセイ 会社案内 カルソニックカンセイ株式会社. Calsonic Kansei Corporation 研究開発センター 本社
 株式会社 Calsonic Kansei Corporation 研究開発センター 本社 R&D Center, Headquarters 331-8501 埼玉県さいたま市北区日進町2丁目1917番地 www.calsonickansei.co.jp 2-1917 Nisshin-cho, Kita-ku, Saitama City, Saitama 331-8501, Japan www.calsonickansei.co.jp/en
株式会社 Calsonic Kansei Corporation 研究開発センター 本社 R&D Center, Headquarters 331-8501 埼玉県さいたま市北区日進町2丁目1917番地 www.calsonickansei.co.jp 2-1917 Nisshin-cho, Kita-ku, Saitama City, Saitama 331-8501, Japan www.calsonickansei.co.jp/en
Ruby for one day game programming camp for beginners
 Ruby for one day game programming camp for beginners Ippei Obayashi KMC/WPI-AIMR Tohoku Univ. Dec. 12, 2015 RubyKaigi 2015 Thanks to KMC members, especially: spi8823, hideya, dis, jf, and seikichi Ippei
Ruby for one day game programming camp for beginners Ippei Obayashi KMC/WPI-AIMR Tohoku Univ. Dec. 12, 2015 RubyKaigi 2015 Thanks to KMC members, especially: spi8823, hideya, dis, jf, and seikichi Ippei
Introduction to Transportation Engineering. Discussion of Stopping and Passing Distances
 Introduction to Transportation Engineering Discussion of Stopping and Passing Distances Dr. Antonio A. Trani Professor of Civil and Environmental Engineering Virginia Polytechnic Institute and State University
Introduction to Transportation Engineering Discussion of Stopping and Passing Distances Dr. Antonio A. Trani Professor of Civil and Environmental Engineering Virginia Polytechnic Institute and State University
A Decision Making Method using Wants Chain Analysis for Business-model Design
 51 ONLINE ISSN: 2188-9023 PRINT ISSN: 0919-2948 Volume 51, Number 1, Page 51-66 Category: Paper Received date: 13, 5, 2015 Accepted date: 25, 9, 2015 Advance publication date: ***** Publication date: 5,
51 ONLINE ISSN: 2188-9023 PRINT ISSN: 0919-2948 Volume 51, Number 1, Page 51-66 Category: Paper Received date: 13, 5, 2015 Accepted date: 25, 9, 2015 Advance publication date: ***** Publication date: 5,
Proposal for amendments to Regulation No. 79 to include ACSF > 10 km/h
 Informal Document ACSF-02-03 Submitted by the expert from Germany Proposal for amendments to Regulation No. 79 to include ACSF > 10 km/h The modifications to the Regulation are marked in blue bold and
Informal Document ACSF-02-03 Submitted by the expert from Germany Proposal for amendments to Regulation No. 79 to include ACSF > 10 km/h The modifications to the Regulation are marked in blue bold and
Development of Electric Fan Propeller Featuring Chestnut Tiger Butterfly Wing Characteristics
 Development of Electric Fan Propeller Featuring Chestnut Tiger Butterfly Wing Characteristics アサギマダラ蝶の翅形状を応用した扇風機用プロペラファンの開発 Yui Kumon* Masaki Ohtsuka* Sharp Corporation has been developing high-performance
Development of Electric Fan Propeller Featuring Chestnut Tiger Butterfly Wing Characteristics アサギマダラ蝶の翅形状を応用した扇風機用プロペラファンの開発 Yui Kumon* Masaki Ohtsuka* Sharp Corporation has been developing high-performance
蒲地政文 Masa Kamachi. 海洋漂流物のモデルシミュレーション Model Simulation of Japan Tsunami Marine Debris (JTMD) ( 海洋研究開発機構 / 地球情報基盤センター JAMSTEC/CEIST)
 ( 海洋研究開発機構 / 地球情報基盤センター JAMSTEC/CEIST)") 海洋漂流物のモデルシミュレーション Model Simulation of Japan Tsunami Marine Debris (JTMD) 蒲地政文 Masa Kamachi ( 海洋研究開発機構 / 地球情報基盤センター JAMSTEC/CEIST) N. Maximenko, J. Hafner, A. MacFadyen ( ハワイ大学 Univ. Hawaii) ( 米国海洋大気庁 NOAA)
海洋漂流物のモデルシミュレーション Model Simulation of Japan Tsunami Marine Debris (JTMD) 蒲地政文 Masa Kamachi ( 海洋研究開発機構 / 地球情報基盤センター JAMSTEC/CEIST) N. Maximenko, J. Hafner, A. MacFadyen ( ハワイ大学 Univ. Hawaii) ( 米国海洋大気庁 NOAA)
Characteristics of. Entering & Exiting High Speed Considerations
 Mod 6 Characteristics of Expressways Entering & Exiting High Speed Considerations Characteristics of an Expressway Controlled access (limited entry and exit) High speed (up to 65 mph) Divided by a barrier
Mod 6 Characteristics of Expressways Entering & Exiting High Speed Considerations Characteristics of an Expressway Controlled access (limited entry and exit) High speed (up to 65 mph) Divided by a barrier
The Potential Effects of the Tokyo 2020 Olympic and Paralympic Games on Physical Activity Participation at the Population Level
 Res Exerc Epidemiol 2015; 17(2): 75-80. Copyright c 2015 by the Japanese Association of Exercise Epidemiology Review Article The Potential Effects of the Tokyo 2020 Olympic and Paralympic Games on Physical
Res Exerc Epidemiol 2015; 17(2): 75-80. Copyright c 2015 by the Japanese Association of Exercise Epidemiology Review Article The Potential Effects of the Tokyo 2020 Olympic and Paralympic Games on Physical
Rollover Warning/Control for Sports Utility Vehicles
 Rollover Warning/Control for Sports Utility Vehicles Bo-Chiuan Chen, GSRA Huei Peng, Associate Prof. Dept. of Mechanical Engineering and Applied Mechanics University of Michigan 1 Outline Introduction
Rollover Warning/Control for Sports Utility Vehicles Bo-Chiuan Chen, GSRA Huei Peng, Associate Prof. Dept. of Mechanical Engineering and Applied Mechanics University of Michigan 1 Outline Introduction
国際スポーツクライミング協会 INTERNATIONAL FEDERATION OF SPORT CLIMBING IFSC
 国際スポーツクライミング協会 INTERNATIONAL FEDERATION OF SPORT CLIMBING IFSC 競技者の居場所情報に関するプログラムのガイドライン Athlete Whereabouts Program Guidelines 2008 年 8 月 4 日に IFSC 執行理事会によって本ガイドライン ( 第 1.0 版 ) が承認された 2008 年 8 月 4 日施行
国際スポーツクライミング協会 INTERNATIONAL FEDERATION OF SPORT CLIMBING IFSC 競技者の居場所情報に関するプログラムのガイドライン Athlete Whereabouts Program Guidelines 2008 年 8 月 4 日に IFSC 執行理事会によって本ガイドライン ( 第 1.0 版 ) が承認された 2008 年 8 月 4 日施行
SKIS& BOOTS COLLECTION 16/17
 SKIS& BOOTS COLLECTION 16/17 tecnicasports.com blizzardsports.com tecnicasports.com BOOTS COLLECTION 16/17 C.A.S. LINER TECHNOLOGY 限りなく足型に近い形状にカスタマイズ可能なインナー C.A.S. SHELL TECHNOLOGY 限りなく足型に近い形状にカスタマイズ可能なシェル
SKIS& BOOTS COLLECTION 16/17 tecnicasports.com blizzardsports.com tecnicasports.com BOOTS COLLECTION 16/17 C.A.S. LINER TECHNOLOGY 限りなく足型に近い形状にカスタマイズ可能なインナー C.A.S. SHELL TECHNOLOGY 限りなく足型に近い形状にカスタマイズ可能なシェル
Distributions of Road Spaces in Tokyo Ward Area While Focusing on Pedestrian Spaces
 Distributions of Road Spaces in Tokyo Ward Area While Focusing on Pedestrian Spaces -Toward a Description of Necessary Levels of Roadway Spaces in a Compact City - Sunyong Eom Candidate for PhD Department
Distributions of Road Spaces in Tokyo Ward Area While Focusing on Pedestrian Spaces -Toward a Description of Necessary Levels of Roadway Spaces in a Compact City - Sunyong Eom Candidate for PhD Department
#19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS
 #19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS Final Research Report Luis E. Navarro-Serment, Ph.D. The Robotics Institute Carnegie Mellon University November 25, 2018. Disclaimer
#19 MONITORING AND PREDICTING PEDESTRIAN BEHAVIOR USING TRAFFIC CAMERAS Final Research Report Luis E. Navarro-Serment, Ph.D. The Robotics Institute Carnegie Mellon University November 25, 2018. Disclaimer
Assessing the Traffic and Energy Impacts of Connected and Automated Vehicles (CAVs)
") Assessing the Traffic and Energy Impacts of Connected and Automated Vehicles (CAVs) Steven E. Shladover, Sc.D. (Retired from) California PATH Program University of California, Berkeley SIP-adus Workshop
Assessing the Traffic and Energy Impacts of Connected and Automated Vehicles (CAVs) Steven E. Shladover, Sc.D. (Retired from) California PATH Program University of California, Berkeley SIP-adus Workshop
( 工 経営情報 国際関係 人文 応用生物 生命健康科 現代教育学部 )
") 英語 ( 工 経営情報 国際関係 人文 応用生物 生命健康科 現代教育学部 ) ( 解答番号 1 ~ 40 ) 1 次の文章を読み, 下の設問に答えよ Israel Kamakawiwo ole was perhaps one of the most famous musicians ever produced by the American state of Hawaii, and a tireless
英語 ( 工 経営情報 国際関係 人文 応用生物 生命健康科 現代教育学部 ) ( 解答番号 1 ~ 40 ) 1 次の文章を読み, 下の設問に答えよ Israel Kamakawiwo ole was perhaps one of the most famous musicians ever produced by the American state of Hawaii, and a tireless
Challenge! Open Governance 2017 Application Form for Citizens & Students
 Challenge! Open Governance 2017 Application Form for Citizens & Students Title of Regional Issue * No. -( 事務局 ) Title Aiming to establish sustainable tourism and transport through the fusion of open data
Challenge! Open Governance 2017 Application Form for Citizens & Students Title of Regional Issue * No. -( 事務局 ) Title Aiming to establish sustainable tourism and transport through the fusion of open data
Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated Driving Systems
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated
Lane Management System Team 1 Adam Pruim - Project Manager Curtis Notarantonio - Security/Safety Engineer Jake Heisey - Domain Expert/Customer
 Lane Management System Team 1 Adam Pruim - Project Manager Curtis Notarantonio - Security/Safety Engineer Jake Heisey - Domain Expert/Customer Liaison Qiuning Ren - Project Facilitator Matt Chebowski -
Lane Management System Team 1 Adam Pruim - Project Manager Curtis Notarantonio - Security/Safety Engineer Jake Heisey - Domain Expert/Customer Liaison Qiuning Ren - Project Facilitator Matt Chebowski -
Ishibashi Soundscape
 都市文化研究 Studies in Urban Cultures Vol.8, pp.88-99,2006 特別寄稿 Ishibashi Soundscape Investigating the Soundscape of Urban Japan Jacob KREUTZFELD 要旨本研究の目的は, 大阪市郊外にある池田市石橋商店街の音の用法を描き出すことである その考察は 音は都市環境を充たし,
都市文化研究 Studies in Urban Cultures Vol.8, pp.88-99,2006 特別寄稿 Ishibashi Soundscape Investigating the Soundscape of Urban Japan Jacob KREUTZFELD 要旨本研究の目的は, 大阪市郊外にある池田市石橋商店街の音の用法を描き出すことである その考察は 音は都市環境を充たし,
Traffic flow optimization at sags by controlling the acceleration of some vehicles
 Traffic flow optimization at sags by controlling the acceleration of some vehicles? Bernat Goñi-Ros Delft University of Technology b.goniros@tudelft.nl TGF 15 Nootdorp (Netherlands) / 28 Oct. 2015 Characteristics
Traffic flow optimization at sags by controlling the acceleration of some vehicles? Bernat Goñi-Ros Delft University of Technology b.goniros@tudelft.nl TGF 15 Nootdorp (Netherlands) / 28 Oct. 2015 Characteristics
この英語の試験は 文法 / 語彙 / 長文読解と聞き取りの 2 つの部分からなり 時間は全部で 100 分です ( 説明を含む ) 試験開始から 70 分で文法 / 語彙 / 長文読解 そして残りの約 30 分で聞き取りテストを行います 受験番号氏名
 試験開始から 70 分で文法 / 語彙 / 長文読解 そして残りの約 30 分で聞き取りテストを行います 受験番号氏名") 宮崎国際大学平成 24 年度一般入学選考入学選考前期前期日程日程試験問題 英語 この英語の試験は 文法 / 語彙 / 長文読解と聞き取りの 2 つの部分からなり 時間は全部で 100 分です ( 説明を含む ) 試験開始から 70 分で文法 / 語彙 / 長文読解 そして残りの約 30 分で聞き取りテストを行います 受験番号氏名 1 平成 24 年度一般入学選考前期前期日程試験問題 筆記試験第 1
宮崎国際大学平成 24 年度一般入学選考入学選考前期前期日程日程試験問題 英語 この英語の試験は 文法 / 語彙 / 長文読解と聞き取りの 2 つの部分からなり 時間は全部で 100 分です ( 説明を含む ) 試験開始から 70 分で文法 / 語彙 / 長文読解 そして残りの約 30 分で聞き取りテストを行います 受験番号氏名 1 平成 24 年度一般入学選考前期前期日程試験問題 筆記試験第 1
Shohei Juku Aikido Canada
 Shohei Juku Aikido Canada Newsletter December 2013 #105 A Sincere Person Winter has arrived. Soon it will be Christmas. Time passes too quickly; more quickly than we are even aware. This year, a phrase
Shohei Juku Aikido Canada Newsletter December 2013 #105 A Sincere Person Winter has arrived. Soon it will be Christmas. Time passes too quickly; more quickly than we are even aware. This year, a phrase
Introduction to Transportation Engineering. Discussion of Stopping and Passing Distances
 Introduction to Transportation Engineering Discussion of Stopping and Passing Distances Dr. Antonio A. Trani Professor of Civil and Environmental Engineering Virginia Polytechnic Institute and State University
Introduction to Transportation Engineering Discussion of Stopping and Passing Distances Dr. Antonio A. Trani Professor of Civil and Environmental Engineering Virginia Polytechnic Institute and State University
Ensuring the Safety and Health of Technical Intern Trainees Involved in Cultivation Agriculture
 For Technical Intern Trainees Ensuring the Safety and Health of Technical Intern Trainees Involved in Cultivation Agriculture The first step to making sure that technical intern trainees who come to Japan
For Technical Intern Trainees Ensuring the Safety and Health of Technical Intern Trainees Involved in Cultivation Agriculture The first step to making sure that technical intern trainees who come to Japan
Baseball-science meets practice
 日蘭ワークショップ Baseball-science meets practice 2017 年 9 月 19 日 ( 火 )14:00-17:00( セミナー )/17:00-17:30( デモ )/17:30-19:30( 懇親会 ) 於 : オランダ大使館出島ラウンジ ( 港区芝公園 3-6-3) ご登録はこちらをクリックして Online 登録をお願いいたします ( 締め切り :9 月 12
日蘭ワークショップ Baseball-science meets practice 2017 年 9 月 19 日 ( 火 )14:00-17:00( セミナー )/17:00-17:30( デモ )/17:30-19:30( 懇親会 ) 於 : オランダ大使館出島ラウンジ ( 港区芝公園 3-6-3) ご登録はこちらをクリックして Online 登録をお願いいたします ( 締め切り :9 月 12
Global Leadership Training Programme in Africa 2016
 Global Leadership Training Programme in Africa 2016 Activity Report of Field Research The International Criminal Court and State Cooperation: The Impact of the 2015 Pretoria High Court Decision on South
Global Leadership Training Programme in Africa 2016 Activity Report of Field Research The International Criminal Court and State Cooperation: The Impact of the 2015 Pretoria High Court Decision on South
自動車車体技術発展の系統化調査 6. A Systematic Survey of Technical Development of Vehicle Bodies. Setsuji Yamaguchi
 自動車車体技術発展の系統化調査 6 A Systematic Survey of Technical Development of Vehicle Bodies 山口 節治 Setsuji Yamaguchi 要旨我国に自動車が導入されたほぼ同時期から自動車車体生産は始まっており 各時代の要望 社会 技術に合わせて各種車体が生産されてきた 乗用車および小型のバン ワゴン車 トラックは自動車メーカ又は系列のメーカで生産されているが
自動車車体技術発展の系統化調査 6 A Systematic Survey of Technical Development of Vehicle Bodies 山口 節治 Setsuji Yamaguchi 要旨我国に自動車が導入されたほぼ同時期から自動車車体生産は始まっており 各時代の要望 社会 技術に合わせて各種車体が生産されてきた 乗用車および小型のバン ワゴン車 トラックは自動車メーカ又は系列のメーカで生産されているが
Driving in Traffic: Short-Range Sensing for Urban Collision Avoidance
 Driving in Traffic: Short-Range Sensing for Urban Collision Avoidance Chuck Thorpe, Dave Duggins, Jay Gowdy, Rob MacLaughlin, Christoph Mertz, Mel Siegel, Arne Suppé, Bob Wang, Teruko Yata Robotics Institute
Driving in Traffic: Short-Range Sensing for Urban Collision Avoidance Chuck Thorpe, Dave Duggins, Jay Gowdy, Rob MacLaughlin, Christoph Mertz, Mel Siegel, Arne Suppé, Bob Wang, Teruko Yata Robotics Institute
Pedestrian Dynamics: Models of Pedestrian Behaviour
 Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Pedestrian Dynamics: Models of Pedestrian Behaviour John Ward 19 th January 2006 Contents Macro-scale sketch plan model Micro-scale agent based model for pedestrian movement Development of JPed Results
Global Journal of Engineering Science and Research Management
 SIMULATION AND OPTIMZING TRAFFIC FLOW AT SIGNALIZED INTERSECTION USING MATLAB Dr Mohammed B. Abduljabbar*, Dr Amal Ali, Ruaa Hameed * Assist Prof., Civil Engineering Department, Al-Mustansiriayah University,
SIMULATION AND OPTIMZING TRAFFIC FLOW AT SIGNALIZED INTERSECTION USING MATLAB Dr Mohammed B. Abduljabbar*, Dr Amal Ali, Ruaa Hameed * Assist Prof., Civil Engineering Department, Al-Mustansiriayah University,
始まりのブザーが鳴るまで問題冊子 解答用紙に手を触れずに
 2019 年度一般入学試験問題英語 始まりのブザーが鳴るまで問題冊子 解答用紙に手を触れずに 下記の注意事項に目を通しておくこと 問題用紙は 1 ページから 12 ページまであるので 始まりのブザー が鳴ったらすぐに確認すること 最初に記名をしてから問題を解くこと 解答はすべて別紙の解答用紙に記入すること とじてある問題用紙をばらばらにしたり 一部を切り取ったり しないこと 終了のブザーが鳴ったら筆記用具を置くこと
2019 年度一般入学試験問題英語 始まりのブザーが鳴るまで問題冊子 解答用紙に手を触れずに 下記の注意事項に目を通しておくこと 問題用紙は 1 ページから 12 ページまであるので 始まりのブザー が鳴ったらすぐに確認すること 最初に記名をしてから問題を解くこと 解答はすべて別紙の解答用紙に記入すること とじてある問題用紙をばらばらにしたり 一部を切り取ったり しないこと 終了のブザーが鳴ったら筆記用具を置くこと
Civil Engineering Research Institute for Cold Region Hirotaka Takechi, Masaru Matsuzawa, Yasuhiko Ito and Tetsuya Kokubu. Hokkaido.
 Influence of Roadside Environment and Road Structures on Blowing-Snow-Induced Visibility Hindrance on Winter Roads : Analysis using the results of weather observations by a visibility observation vehicle
Influence of Roadside Environment and Road Structures on Blowing-Snow-Induced Visibility Hindrance on Winter Roads : Analysis using the results of weather observations by a visibility observation vehicle
Driver Training School Instructor Curriculum Requirements for Student Learning & Performance Goals
 Driver Training School Instructor Curriculum Requirements for Student Learning & Performance Goals A driver training school s course of classroom and laboratory instruction is the key tool in establishing
Driver Training School Instructor Curriculum Requirements for Student Learning & Performance Goals A driver training school s course of classroom and laboratory instruction is the key tool in establishing
OBSERVATION OF GAP ACCEPTANCE DURING INTERSECTION APPROACH
 OBSERVATION OF GAP ACCEPTANCE DURING INTERSECTION APPROACH Delphine Cody, Christopher Nowakowski, Bénédicte Bougler California PATH program - Institute of Transportation Studies University of California,
OBSERVATION OF GAP ACCEPTANCE DURING INTERSECTION APPROACH Delphine Cody, Christopher Nowakowski, Bénédicte Bougler California PATH program - Institute of Transportation Studies University of California,
Obtain a Simulation Model of a Pedestrian Collision Imminent Braking System Based on the Vehicle Testing Data
 Obtain a Simulation Model of a Pedestrian Collision Imminent Braking System Based on the Vehicle Testing Data Bo Tang, Stanley Chien, and Yaobin Chen Transportation Active Safety Institute Indiana University-Purdue
Obtain a Simulation Model of a Pedestrian Collision Imminent Braking System Based on the Vehicle Testing Data Bo Tang, Stanley Chien, and Yaobin Chen Transportation Active Safety Institute Indiana University-Purdue
電気通信大学脳科学ライフサポート研究センター特別講演会 平成 25 年 5 月 14 日 脳血流のバイオメカニクス 谷下一夫 早稲田大学ナノ理工学研究機構
 電気通信大学脳科学ライフサポート研究センター特別講演会 平成 25 年 5 月 14 日 脳血流のバイオメカニクス 谷下一夫 早稲田大学ナノ理工学研究機構 血管は単なるパイプではない 物理現象である血流との整合性は? Observed distribution of atherosclerotic plaques (grey shading) in the vasculatures of mice
電気通信大学脳科学ライフサポート研究センター特別講演会 平成 25 年 5 月 14 日 脳血流のバイオメカニクス 谷下一夫 早稲田大学ナノ理工学研究機構 血管は単なるパイプではない 物理現象である血流との整合性は? Observed distribution of atherosclerotic plaques (grey shading) in the vasculatures of mice
スマイルフォトブック : S サイズ 24 ページの見本です この見本は データ量を抑えるために低画質にて保存しています 入稿の際は画質を圧縮無しの高画質で保存してください
 Getting to Hawaii スマイルフォトブック : S サイズ 24 ページの見本です この見本は データ量を抑えるために低画質にて保存しています 入稿の際は画質を圧縮無しの高画質で保存してください PC に保存し Acrobat Reader でこの見本をご覧になる場合 ページ表示 を 見開きページ + 見開き表示モードで表紙をレイアウト をお選びください 見本アルバム内の太文字日本語は
Getting to Hawaii スマイルフォトブック : S サイズ 24 ページの見本です この見本は データ量を抑えるために低画質にて保存しています 入稿の際は画質を圧縮無しの高画質で保存してください PC に保存し Acrobat Reader でこの見本をご覧になる場合 ページ表示 を 見開きページ + 見開き表示モードで表紙をレイアウト をお選びください 見本アルバム内の太文字日本語は
常葉大学短期大学部一般入学試験前期日程 1. 試験開始の合図があるまで 問題用紙 解答用紙の中を見てはいけません
 平成 29 年度 常葉大学短期大学部一般入学試験前期日程 英語 (60 分 100 点 ) 注意事項 1. 試験開始の合図があるまで 問題用紙 解答用紙の中を見てはいけません 2. この表紙以外に 問題用紙が 4 枚 (p.1 8) 解答用紙が 1 枚あります 試験中に問題用紙 解答用紙の印刷不鮮明 枚数の不足 汚れ等に気付いた 場合は 手を挙げて監督者に知らせなさい 3. 解答用紙には解答欄以外に次の記入欄があるので
平成 29 年度 常葉大学短期大学部一般入学試験前期日程 英語 (60 分 100 点 ) 注意事項 1. 試験開始の合図があるまで 問題用紙 解答用紙の中を見てはいけません 2. この表紙以外に 問題用紙が 4 枚 (p.1 8) 解答用紙が 1 枚あります 試験中に問題用紙 解答用紙の印刷不鮮明 枚数の不足 汚れ等に気付いた 場合は 手を挙げて監督者に知らせなさい 3. 解答用紙には解答欄以外に次の記入欄があるので
THe rip currents are very fast moving narrow channels,
 1 Rip Current Detection using Optical Flow Shweta Philip sphilip@ucsc.edu Abstract Rip currents are narrow currents of fast moving water that are strongest near the beach. These type of currents are dangerous
1 Rip Current Detection using Optical Flow Shweta Philip sphilip@ucsc.edu Abstract Rip currents are narrow currents of fast moving water that are strongest near the beach. These type of currents are dangerous
F A C U L T Y JOURNAL OF INTERDISCIPLINARY RESEARCH IN HUMAN AND SOCIAL SCIENCES UNIVERSITY OF TSUKUBA (JAPAN)
") I N T E R F A C U L T Y JOURNAL OF INTERDISCIPLINARY RESEARCH IN HUMAN AND SOCIAL SCIENCES UNIVERSITY OF TSUKUBA (JAPAN) https://journal.hass.tsukuba.ac.jp/interfaculty Inter Faculty, 7 (2016): 173 183
I N T E R F A C U L T Y JOURNAL OF INTERDISCIPLINARY RESEARCH IN HUMAN AND SOCIAL SCIENCES UNIVERSITY OF TSUKUBA (JAPAN) https://journal.hass.tsukuba.ac.jp/interfaculty Inter Faculty, 7 (2016): 173 183
コミュニケーション英語 Ⅲ 英語表現 Ⅰ 英語表現 Ⅱ) 試験時間 120 分 文学部, 教育学部, 法学部, 理学部, 医学部, 工学部 3. 試験開始後, この冊子又は解答紙に落丁 乱丁及び印刷の不鮮明な箇所などがあれば, 手を挙げて監督者に知らせなさい
 試験時間 120 分 文学部, 教育学部, 法学部, 理学部, 医学部, 工学部 3. 試験開始後, この冊子又は解答紙に落丁 乱丁及び印刷の不鮮明な箇所などがあれば, 手を挙げて監督者に知らせなさい") 平成 30 年度 ( 前期日程 ) 入学者選抜学力検査問題 英 語 ( コミュニケーション英語 Ⅰ コミュニケーション英語 Ⅱ コミュニケーション英語 Ⅲ 英語表現 Ⅰ 英語表現 Ⅱ) 試験時間 120 分 文学部, 教育学部, 法学部, 理学部, 医学部, 工学部 問題 ページ Ⅰ Ⅳ 1 9 1. 試験開始の合図があるまで, この冊子を開いてはいけません 2. なお, 解答紙には, 必要事項以外は記入してはいけません
平成 30 年度 ( 前期日程 ) 入学者選抜学力検査問題 英 語 ( コミュニケーション英語 Ⅰ コミュニケーション英語 Ⅱ コミュニケーション英語 Ⅲ 英語表現 Ⅰ 英語表現 Ⅱ) 試験時間 120 分 文学部, 教育学部, 法学部, 理学部, 医学部, 工学部 問題 ページ Ⅰ Ⅳ 1 9 1. 試験開始の合図があるまで, この冊子を開いてはいけません 2. なお, 解答紙には, 必要事項以外は記入してはいけません
Longitudinal Control of a Platoon of Road Vehicles Equipped with Adaptive Cruise Control System
 Longitudinal Control of a Platoon of Road Vehicles Equipped with Adaptive Cruise Control System ZEESHAN ALI MEMON*, SALEH JUMANI*, AND JAVED LARIK** RECEIVED ON 2O.02.2012 ACCEPTED ON 21.06.2012 ABSTRACT
Longitudinal Control of a Platoon of Road Vehicles Equipped with Adaptive Cruise Control System ZEESHAN ALI MEMON*, SALEH JUMANI*, AND JAVED LARIK** RECEIVED ON 2O.02.2012 ACCEPTED ON 21.06.2012 ABSTRACT
THE EFFECTS OF LEAD-VEHICLE SIZE ON DRIVER FOLLOWING BEHAVIOR: IS IGNORANCE TRULY BLISS?
 THE EFFECTS OF LEAD-VEHICLE SIZE ON DRIVER FOLLOWING BEHAVIOR: IS IGNORANCE TRULY BLISS? James R. Sayer, Mary Lynn Mefford Human Factors Division University of Michigan Transportation Research Institute
THE EFFECTS OF LEAD-VEHICLE SIZE ON DRIVER FOLLOWING BEHAVIOR: IS IGNORANCE TRULY BLISS? James R. Sayer, Mary Lynn Mefford Human Factors Division University of Michigan Transportation Research Institute
Development and Assessment of CACC for Cars and Trucks
 Development and Assessment of CACC for Cars and Trucks Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley May 24, 2017 1 Overview Cooperative ACC vs. Platooning History
Development and Assessment of CACC for Cars and Trucks Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley May 24, 2017 1 Overview Cooperative ACC vs. Platooning History
Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings
 Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings Objectives The goal of this study is to advance the state of the art in understanding
Title: Modeling Crossing Behavior of Drivers and Pedestrians at Uncontrolled Intersections and Mid-block Crossings Objectives The goal of this study is to advance the state of the art in understanding
A STUDY OF SIMULATION MODEL FOR PEDESTRIAN MOVEMENT WITH EVACUATION AND QUEUING
 A STUDY OF SIMULATION MODEL FOR PEDESTRIAN MOVEMENT WITH EVACUATION AND QUEUING Shigeyuki Okazaki a and Satoshi Matsushita a a Department of Architecture and Civil Engineering, Faculty of Engineering,
A STUDY OF SIMULATION MODEL FOR PEDESTRIAN MOVEMENT WITH EVACUATION AND QUEUING Shigeyuki Okazaki a and Satoshi Matsushita a a Department of Architecture and Civil Engineering, Faculty of Engineering,
CHALLENGE CLUB 2Gr.Time Attack 2 回目 Sector Time Chart
 35 C2R 西田佳生 86 BESTLAP TIME 2'46.093(9/9) PIT STOP 0 回 FAST 2'46.093 46.037 28.669 1'00.068 185.7 30.773 2 = 2'57.020 49.893 30.198 1'02.008 184.2 34.921 118.1 3 = 2'51.488 47.005 31.637 1'01.187 184.5
35 C2R 西田佳生 86 BESTLAP TIME 2'46.093(9/9) PIT STOP 0 回 FAST 2'46.093 46.037 28.669 1'00.068 185.7 30.773 2 = 2'57.020 49.893 30.198 1'02.008 184.2 34.921 118.1 3 = 2'51.488 47.005 31.637 1'01.187 184.5
 Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
Kochi University of Technology Aca Study on Dynamic Analysis and Wea Title stem for Golf Swing Author(s) LI, Zhiwei Citation 高知工科大学, 博士論文. Date of 2015-03 issue URL http://hdl.handle.net/10173/1281 Rights
History of Traffic Safety Measures: Relevant Legislation, Organization and Policy
 History of Traffic Safety Measures: Relevant Legislation, Organization and Policy November 27, 2012 Ministry of Land, Infrastructure, Transport and Tourism Current Traffic Accident Conditions in Japan
History of Traffic Safety Measures: Relevant Legislation, Organization and Policy November 27, 2012 Ministry of Land, Infrastructure, Transport and Tourism Current Traffic Accident Conditions in Japan
Coast Riders Motorcycle Club. Group Ride Guidelines
 Coast Riders Motorcycle Club Group Ride Guidelines Coast Riders Group Riding Guidelines... 2 Part One The Formation... 2 Spacing... 3 Group Size... 3 Part Two The Participants... 4 The Group Leader...
Coast Riders Motorcycle Club Group Ride Guidelines Coast Riders Group Riding Guidelines... 2 Part One The Formation... 2 Spacing... 3 Group Size... 3 Part Two The Participants... 4 The Group Leader...
Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions
 Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions CONTENTS (MODULE 3) Introduction...1 Purpose...1 Goals and Learning Outcomes...1 Organization
Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions CONTENTS (MODULE 3) Introduction...1 Purpose...1 Goals and Learning Outcomes...1 Organization
 Siła-Nowicka, K. (2018) Analysis of Actual Versus Permitted Driving Speed: a Case Study from Glasgow, Scotland. In: 26th Annual GIScience Research UK Conference (GISRUK 2018), Leicester, UK, 17-20 Apr
Siła-Nowicka, K. (2018) Analysis of Actual Versus Permitted Driving Speed: a Case Study from Glasgow, Scotland. In: 26th Annual GIScience Research UK Conference (GISRUK 2018), Leicester, UK, 17-20 Apr
蒲地政文 Masa Kamachi. 海洋漂流物のモデルシミュレーション Model Simulation of Japan Tsunami Marine Debris (JTMD) ( 海洋研究開発機構 / 地球情報基盤センター JAMSTEC/CEIST)
 ( 海洋研究開発機構 / 地球情報基盤センター JAMSTEC/CEIST)") 海洋漂流物のモデルシミュレーション Model Simulation of Japan Tsunami Marine Debris (JTMD) 蒲地政文 Masa Kamachi ( 海洋研究開発機構 / 地球情報基盤センター JAMSTEC/CEIST) N. Maximenko, J. Hafner, A. MacFadyen ( ハワイ大学 Univ. Hawaii) ( 米国海洋大気庁 NOAA)
海洋漂流物のモデルシミュレーション Model Simulation of Japan Tsunami Marine Debris (JTMD) 蒲地政文 Masa Kamachi ( 海洋研究開発機構 / 地球情報基盤センター JAMSTEC/CEIST) N. Maximenko, J. Hafner, A. MacFadyen ( ハワイ大学 Univ. Hawaii) ( 米国海洋大気庁 NOAA)
Contnts 操作方法 3 オフェンス操作 ムーブメント 戦術 6 ディフェンス操作 7 ゴールキーパー 8 セットプレー 9 スキルムーブ 13 ゲームの始め方 17 メインメニュー 18 試合の進め方 19 オフラインゲームモード 23 オンラインプレイ 28
 ONLINE MANUAL Contnts C O N T E N T S 操作方法 3 オフェンス操作 ムーブメント 4 6 戦術 6 ディフェンス操作 7 ゴールキーパー 8 セットプレー 9 スキルムーブ 13 ゲームの始め方 17 メインメニュー 18 試合の進め方 19 オフラインゲームモード 23 オンラインプレイ 28 2 Controller 操作方法 Xbox 360 3 Controls
ONLINE MANUAL Contnts C O N T E N T S 操作方法 3 オフェンス操作 ムーブメント 4 6 戦術 6 ディフェンス操作 7 ゴールキーパー 8 セットプレー 9 スキルムーブ 13 ゲームの始め方 17 メインメニュー 18 試合の進め方 19 オフラインゲームモード 23 オンラインプレイ 28 2 Controller 操作方法 Xbox 360 3 Controls
ANIMANIA FESTIVAL WORLD COSPLAY SUMMIT AUSTRALIAN TEAM PRE-SELECTION 2008 PORTFOLIO Please submit your portfolio to:
 ANIMANIA FESTIVAL 2008 - WORLD COSPLAY SUMMIT AUSTRALIAN TEAM PRE-SELECTION 2008 PORTFOLIO Please submit your portfolio to: cosplay@animania.net.au To the WCS Australian Round Organisers, Aly and I (K)
ANIMANIA FESTIVAL 2008 - WORLD COSPLAY SUMMIT AUSTRALIAN TEAM PRE-SELECTION 2008 PORTFOLIO Please submit your portfolio to: cosplay@animania.net.au To the WCS Australian Round Organisers, Aly and I (K)
BURAsl Ultegra Fulcrum Racing 5 LG. NAZARÉsl Ultegra 8000
 pecification BURA Disc set BURA Disc Ultegra 00 BURA Disc BURAsl set BURAsl DuraAce 9 BURAsl Ultegra 00 Weight Color 2 1050g (/56cm) RITCHEY COP RITCHEY COP EVO RITCHEY COP 4AXI Ultegra 00 BRR Fulcrum
pecification BURA Disc set BURA Disc Ultegra 00 BURA Disc BURAsl set BURAsl DuraAce 9 BURAsl Ultegra 00 Weight Color 2 1050g (/56cm) RITCHEY COP RITCHEY COP EVO RITCHEY COP 4AXI Ultegra 00 BRR Fulcrum
リオ オリンピック参加資格取得 ( ロード男子 ) < 個人ロード > ワールド国別ランキング国別あたり選手数計 1-5 位 5 名 25 名 6-15 位 4 名 40 名
 < 個人ロード > ワールド国別ランキング国別あたり選手数計 1-5 位 5 名 25 名 6-15 位 4 名 40 名") リオ オリンピック参加資格取得 ( ロード男子 ) < 個人ロード > ワールド国別ランキング国別あたり選手数計 1-5 位 5 名 25 名 6-15 位 4 名 40 名 名 計 65 アジア国別ランキング国別あたり選手数計 1 位 3 名 3 名 2-4 位 2 名 6 名 計 9 名 *2015 大陸選手権成績による ( 上記基準以外の国 ) 大陸 順位 国別あたり選手数 計 アフリカ 1-2
リオ オリンピック参加資格取得 ( ロード男子 ) < 個人ロード > ワールド国別ランキング国別あたり選手数計 1-5 位 5 名 25 名 6-15 位 4 名 40 名 名 計 65 アジア国別ランキング国別あたり選手数計 1 位 3 名 3 名 2-4 位 2 名 6 名 計 9 名 *2015 大陸選手権成績による ( 上記基準以外の国 ) 大陸 順位 国別あたり選手数 計 アフリカ 1-2
Road inventory database system using road image and geo-coordinates. Kazuya AOKI. ERPUG Forum 2016
 ERPUG Forum 2016 Road inventory database system using road image and geo-coordinates October 20, 2016 Kazuya AOKI Graduate School of Management, Kyoto University PASCO CORPORATION Quality Infrastructure
ERPUG Forum 2016 Road inventory database system using road image and geo-coordinates October 20, 2016 Kazuya AOKI Graduate School of Management, Kyoto University PASCO CORPORATION Quality Infrastructure
Proposal for amendments to Regulation No. 79 to include ACSF > 10 km/h
 Submitted by France Informal Document: ACSF-04-03 Proposal based on ACSF-03-16 Proposal for amendments to Regulation No. 79 to include ACSF > 10 km/h The modifications to the Regulation are marked in bold
Submitted by France Informal Document: ACSF-04-03 Proposal based on ACSF-03-16 Proposal for amendments to Regulation No. 79 to include ACSF > 10 km/h The modifications to the Regulation are marked in bold
Aerodynamic Shape Design of the Bow Network Monitoring Equipment of High-speed Train
 2017 2nd International Conference on Industrial Aerodynamics (ICIA 2017) ISBN: 978-1-60595-481-3 Aerodynamic Shape Design of the Bow Network Monitoring Equipment of High-speed Train Wang Zhe and Ji Peng
2017 2nd International Conference on Industrial Aerodynamics (ICIA 2017) ISBN: 978-1-60595-481-3 Aerodynamic Shape Design of the Bow Network Monitoring Equipment of High-speed Train Wang Zhe and Ji Peng
Designing a Traffic Circle By David Bosworth For MATH 714
 Designing a Traffic Circle By David Bosworth For MATH 714 Abstract We all have had the experience of sitting in a traffic jam, or we ve seen cars bunched up on a road for some no apparent reason. The use
Designing a Traffic Circle By David Bosworth For MATH 714 Abstract We all have had the experience of sitting in a traffic jam, or we ve seen cars bunched up on a road for some no apparent reason. The use
 http://en.wikipedia.org/wiki/darpa_grand_challenge - The Urban Challenge requires designers to build vehicles able to obey all traffic laws while they detect and avoid other robots on the course. This
http://en.wikipedia.org/wiki/darpa_grand_challenge - The Urban Challenge requires designers to build vehicles able to obey all traffic laws while they detect and avoid other robots on the course. This
REVISED TECHNICAL INTERPRETATION OF ANNEX 1 TO PIC/S GMP GUIDE
 MEDICINAL PRODUCTS PI 032-2, 8 January 2010 RECOMMENDATION 1 / 28 News REVISED TECHNICAL INTERPRETATION OF ANNEX 1 TO PIC/S GMP GUIDE PIC/S GMP GUIDE の ANNEX 1 の改訂した技術的解釈 PIC/S has published a revised
MEDICINAL PRODUCTS PI 032-2, 8 January 2010 RECOMMENDATION 1 / 28 News REVISED TECHNICAL INTERPRETATION OF ANNEX 1 TO PIC/S GMP GUIDE PIC/S GMP GUIDE の ANNEX 1 の改訂した技術的解釈 PIC/S has published a revised
70 % ITARDA. Nighttime fatal accidents involving senior pedestrians. 65 yrs old and over. of pedestrians killed are seniors (65 and over) 1.
 1.") ITARDA Institute for Traffic Accident Research and Data Analysis ( 財 ) 交通事故総合分析センター ITARDA INFORMATION No. 211 87FEBRUARY 65 yrs old and over 1,22 Fatalities 1,2 1, 9 8 6 7 % of pedestrians killed are
ITARDA Institute for Traffic Accident Research and Data Analysis ( 財 ) 交通事故総合分析センター ITARDA INFORMATION No. 211 87FEBRUARY 65 yrs old and over 1,22 Fatalities 1,2 1, 9 8 6 7 % of pedestrians killed are
Simulation of the Hybtor Robot
 Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Colorado Division of Fire Prevention & Control Driver Operator JPRs (NFPA 1002, 2014 Edition)
") Colorado Division of Fire Prevention & Control Driver Operator JPRs ( Edition) JPR # Task Initial Certification JPR Requirement: 8 Mandatory Renewal JPR Requirement: 100% of All JPRs (including all subsections)
Colorado Division of Fire Prevention & Control Driver Operator JPRs ( Edition) JPR # Task Initial Certification JPR Requirement: 8 Mandatory Renewal JPR Requirement: 100% of All JPRs (including all subsections)
The Quality of Behavioral and Environmental Indicators Used to Infer the Intention to Change Lanes
 University of Iowa Iowa Research Online Driving Assessment Conference 2007 Driving Assessment Conference Jul 11th, 12:00 AM The Quality of Behavioral and Environmental Indicators Used to Infer the Intention
University of Iowa Iowa Research Online Driving Assessment Conference 2007 Driving Assessment Conference Jul 11th, 12:00 AM The Quality of Behavioral and Environmental Indicators Used to Infer the Intention