August Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd.
|
|
|
- Frederick Hubbard
- 5 years ago
- Views:
Transcription

1 August 2007 Using the Gavia AUV system to locate and document Munitions Dumped at Sea. Presenter: Mr. Chris Roper Roper Resources Ltd.

2 Gavia? Gavia immer (common loon; great northern diver)

3 Autonomous Underwater Vehicle (AUV) Compact size 200, 500, 1000 & 2000 meter depth rated



4 HAFMYND Ehf Reykjavík Gavia is a modular AUV system, new sensors and devices can be integrated in the shortest possible time. Headquartered in Reykjavik, Iceland 19 full time employees with international representative network Majority ownership Mallard Investments, Icelandic New Technology Venture fund, University of Iceland, and employees

5 AUV Operations Completely Autonomous no umbilical Map based used interface Missions are planned using waypoints All aspects of the mission programmed through the interface Data is recovered at the end of the mission
6 Gavia Artificial Intelligence A.I. Crew Gavia is operated like a ship and all A.I. crew members have individual tasks and responsibilities. The Captain has overall vessel responsibility, he can and will over ride any AI crew members command if his vessel is put in harms way. The AI crew consists of: Mission Commander, Navigator, Engineer, Instrument Operator, Data Analysts and Pilots. Pilots can be easily added for a particular task, one knows how to track the seafloor, another knows how to avoid obstacles etc. The client can add his own AI Crew Member Mission Specialist The Mission Specialist is used to operate the client proprietary sensor which can be installed in the Payload module and I don t have to know what the Mission Specialists task is.



7 1996 Development of the Gavia begins 1997 First Gavia prototype s maiden voyage 1999 Hafmynd commercialized 2000 First sales in Iceland cnd Generation Gavia introduced 2004 First export sales of the Gavia 2005 First deliveries of 2cnd generation Gavia to the export market




8 PRODUCTION & TESTING Fully modular Gavia AUV production on-going First customer deliveries early 2005 Out-sourced standard component fabrication Mechanical parts in Iceland, Denmark, UK Commercial Off the Shelf technology (COTS) used for all sensors In-house assembly and testing Pressure testing to full operating depth Extreme temperature operation Quality assurance QA program ISO 9001 underway

9 Hafmynd Current Customers US Navy s SPAWAR division University of British Columbia Canadian National Research Council University of Iceland Reykjavik Energy Royal Danish Navy Australian DSTO


10 DIVERSE APPLICATIONS Marine Science Environmental Monitoring Limnology and oceanography MCM and harbour surveillance ASW Training Target Pipeline Inspection Search and Recovery Hydrographic surveys


11 ENGINEERING TESTBED National Research Council, Canada

12 LIMNOLOGY RESEARCH University of British Columbia, Vancouver
13 DUAL-ROLE MCM / HARBOR PROTECTION SPAWAR, US Navy, San Diego



14 Harbour search & recovery Power boat crashed into rock outside harbour mouth One passenger missing after attempting to rescue trapped fellow passenger Very low visibility m2 initially searched by divers "The divers dropped down the shot lines placed using Differential GPS on the coordinates from the Gavia side scan sonar images, and found themselves within a hands reach of the targets. The Gavia AUV was the most accurate and effective search tool used in this operation, which also employed divers, towed side-scan sonars, and ROVs." - Mikael R Olafsson ICE-SAR search coordinator Gavia participation in Search and Recovery operation with Icelandic Search and Rescue teams m 2 searched in 90 minutes

15 August 2007 User Interface - Planning Mode

16 Surface and subsurface communications Over-the-horizon satellite comms Underwater acoustic comms


 Low light variable frame")


17 Available Expansion Modules: Various Collision Avoidance (Imagenex Single Beam) 15 beam angle 30m range. Camera and Strobe (Var.) Low light variable frame rate and various resolutions available Acoustic Modem Upgrade (LinkQuest) Acoustic Modem Upgrade w/ USBL/LBL upgrade (PinPoint 1500)



18 Available Expansion Modules: Environmental Sensors ECHO SOUNDER: A 120 khz Echo sounder is available for Gavia. BACKSCATTER METER: The Wetlabs ECO BB3 Puck Backscatter Sensor is used to determine water clarity SOUND VELOCITY METER: measures sound velocity is used for correcting acoustic data for variations in the speed of sound through water. CTD: Seabird SBE 49



19 August 2007 Precision navigation Inertial or Acoustic nav GPS on surface


20 Available Expansion Modules: Side Scan Sonar Side Scan Sonar: Marine Sonic Mounted in Command and Communication module Available in a number of frequencies Data stored on dedicated solid state memory that can be expanded for larger capacity if desired


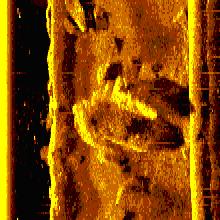
21 Side Scan Image of a Manta Mine





22 MCM Roles SEARCH CLASSIFY - MAP Initial survey conducted using low frequency Side Scan Sonar. Classify using high frequency Side Scan Sonar. CAD - Computer Assisted Detection CAC Computer Assisted Classification


23 MCM Roles REACQUIRE-IDENTIFY Side Scan Sonar High-resolution SSS around MLO 1800kHz Third party post-processing SeeTrack post-mission visualization MEDAL format messages




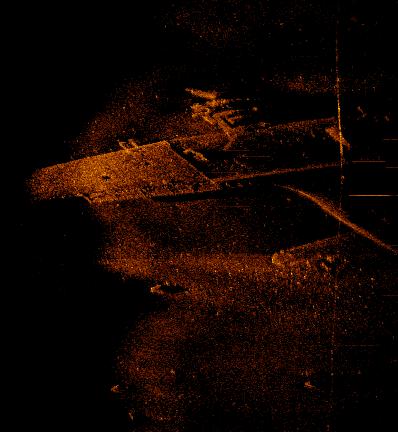
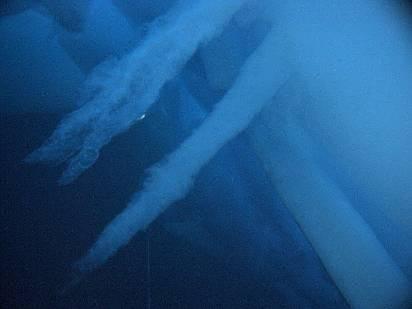
24 MCM Roles REACQUIRE - IDENTIFY Optical imaging Digital still images around MLO Variable frame rate for coverage Sensitive b/w or colour Optional LED Strobe

25 August D Side Scan


26 August 2007

27 GeoSwath Plus Sonar on Gavia AUV A Commercial Deployment


28 August 2007



29




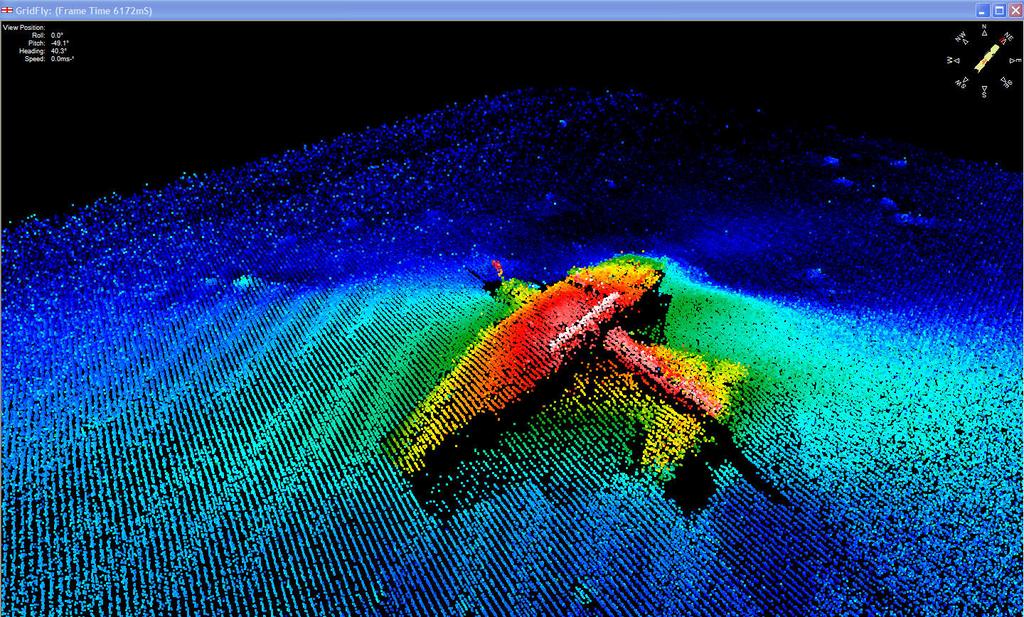
30 Available Expansion Module: GeoSwath IHO Standard Bathymetric Sonar Geoswath Plus 500 khz Bathymetric Sonar GeoSwath Plus is a PC based, swath bathymetry system supplied by GeoAcoustics Ltd., UK, which meets IHO standards for hydrographic survey. The GeoSwath swath bathymetry system offers swath coverage of up to 12 times water depth. The GeoSwath system can also give a third dimension to side scan images, enhancing the ability to detect objects on the sea bed, and place these in the context of the sea bed terrain.


31 DVL aided INS System DVL AIDED INS SYSTEM The DVL aided INS system consists of two modules: The RD Instruments 1200 khz DVL Gavia module, 30 beam angle, 30m bottom lock. The Gavia INS module containing either the Kearfott T-16 or the higher accuracy T-24 INS system or the Ixsea PHINS derivative DVL INS provides Gavia with highly accurate buoy free navigation (3m hour drift for the T-24 and 10m for the T-16)

32 Payload Modules The PAYLOAD MODULE is available for custom sensors and equipment. The Gavia payload module includes Gavia electronic stack that interfaces the module to the rest of the vehicle. A software development kit (SDK) is available for the Payload module.
33 Gavia Outfitted to do Real Bathymetric survey 2.6m Propulsion Control & Comms INS DVL GeoSwath Batt. Nose


34 Gavia Bathymetric Survey Configuration with 500 khz GeoSwath Plus AUV Mount August 2007

35 Survey Examples: GeoSwath Plus on the Gavia AUV 35

36 GeoSwath Plus on the Gavia AUV 36

37 500KHz data from GS+ on Gavia
38

39 Iceland Gavia data 39

40 GeoSwath Plus on the Gavia AUV 40

41 GeoSwath Patch Test, Reykjavik Harbor GAVIA AUV MOUNTED 0701


42 Pre-lay pipe trench survey using AUV mounted GeoSwath 1km August 2007



43 Unique 3-D mapping of littoral areas Harbour approach lane Caspian Sea BP appreciate the significance of AUVs as a tool and they are a tool that we want in our toolbox. - Chris Button, BP, Exploration and Production Technology Group Sept 2006, Underwater Vehicle Online Approach areas where vessels run aground

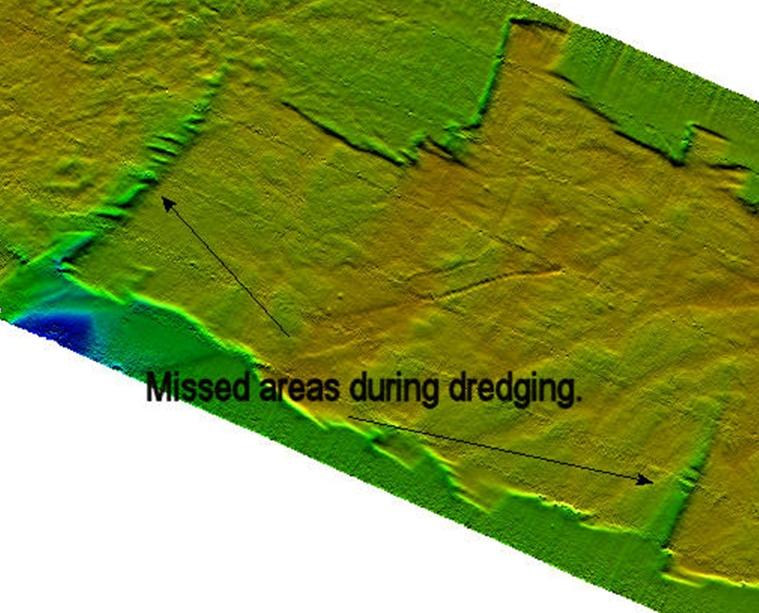
44 Harbour post-dredge survey using AUV mounted GeoSwath sonar. 100m
45





46 August 2007 Brest, France Harbor Protection Demonstration, Nov 2005
.")

47 LUNDI 28 NOVEMBRE: APRES MIDI Évaluation de la précision de navigation et de localisation lors d une recherche en zone portuaire (mise à l eau et récupération par embarcation légère). Espace entre rails 15 m Distance parcourue : 4900 m Durée de travail : 1 heure Vitesse de chasse : 2,5 Mines d exercice : Manta, Rockan, Tronçon Base de données KLEIN, MULTI FAISCEAUX et CMT MANTA TRONCON ROCKAN Pattern réalisé au départ et à la fin de la mission: Écartement croissant des rails Recalage GPS August 2007 Recalage GPS

48 August 2007
49 Brest Mission Statistics Distance travelled during initial lawnmower pattern and transit in and out of harbour: 8.3 km Mission duration of portions 1 and 2; 1hr 45 minutes Speed was 1.8m/s or 3,49 knots Navigation precision approximately 4m, based on difference in GPS positioning and INS positioning after the completion of the initial lawnmower pattern route and berthing when vehicle surfaced. Preparation: approx 1 hour Data download: 6 min via WLAN without recovering vehicle m2 surveyed





50 August 2007 Under Ice Experiments April 2007

51 The Survey Area

52 August 2007

53 August 2007

54 August 2007 Mission Data

55 DEVELOPMENT OF AUTOMATIC PIPELINE TRACKING SOFTWARE


56 0701 PIPELINE ROUTE SELECTION based on bathymetry and environmental data


57 PIPELINE ROUTE SELECTION based on bathymetry and environmental data Courtesy of Quester Tangent 0701
58 DEVELOPMENT OF AUTOMATIC PIPELINE TRACKING SOFTWARE Using the GeoAcoustic SWATH + sonar system the Gavia will be used to track an oil pipeline in real time. The GAVIA AI sonar operator and the GAVIA AI Navigator will cooperate and together they will keep the Gavia AUV 2 meters above the pipeline and traveling on the exact as laid course of the pipeline. The Gavia will travel at 3 knots and it will perform a full pipeline inspection autonomously. Data will be collected using the following sensors: SWATH 3D Bathymetry, Continuous Digital Video & Still Photos, CTD and Turbidity.
59 DEVELOPMENT OF AUTOMATIC PIPELINE TRACKING SOFTWARE Using the GeoAcoustic SWATH + sonar system the Gavia will be used to track an oil pipeline in real time. The GAVIA AI sonar operator and the GAVIA AI Navigator will cooperate and together they will keep the Gavia AUV 2 meters above the pipeline and traveling on the exact as laid course of the pipeline. The Gavia will travel at 3 knots and it will perform a full pipeline inspection autonomously. Data will be collected using the following sensors: SWATH 3D Bathymetry, Continuous Digital Video & Still Photos, CTD and Turbidity.
60 DEVELOPMENT OF AUTOMATIC TNT PLUME TRACKING SOFTWARE In the past 3 years there have been a number of Ocean institutes that have been working on actively tracking TNT plumes with AUV System. The funding has come from ONR, Office of Naval Research. The newly developed sensor has been designed to detect several kinds of commercial and military explosives while riding on a remotely controlled surface vehicle that wirelessly transmits data to a hand-held computer. The sensor uses electrochemical means to detect explosive residues. In developing the sensor, researchers took into account the fact that TNT in sea water undergoes biodegradation in a number of different ways. The new sensor and its platform were designed at the Center for Ocean Technology of South Florida University and funded by the U.S. navy. August 2007
61 DEVELOPMENT OF AUTOMATIC TNT PLUME TRACKING SOFTWARE Institutes working on the effort include: Woods Hole Oceanographic Institute (WHOI) Battelle PNW Laboratories (BPNWL) Mass. Institute of Technology (MIT) Commercial groups working on this effort include: Hafmynd Gavia AUV Hydroid Remus Battelle _ Bluefin Robotics August 2007
62 DEVELOPMENT OF AUTOMATIC TNT PLUME TRACKING SOFTWARE The WHOI AUV system Remus has successfully lock onto and tracked a TNT plume using the ICX Nomadics SeaPup. Currently WHOI has the lead in tracking plumes and their main interest is not in tracking TNT plumes but in tracking plumes that are associated with black smokers. Black smokers are active seafloor volcanoes that belch a number of organic gases including H2S and methane. The WHOI AUV has successfully located black smoker plumbs at various water depths and has actively tracked these plumbs back to source.
63 THE TRUTH ABOUT DEVELOPING AN AUTOMATIC TNT PLUME TRACKING SOFTWARE SYSTEM THAT WILL WORK WITH AUV SYSTEM The Truth 1) It is not easy to track a plumb underwater but the nice thing about the TNT molecular chain is it stay together. 2) It is not easy to track a plumb underwater but all submerged munitions have one thing in common, they will all eventually leak. 3) It is not easy to do what we are proposing to do, but if we don t do it WHO WILL? August 2007
64 Bottom Line is: WE STILL HAVE A LOT TO LEARN AND WE HAVE SOME GREAT TEACHERS QUESTIONS? Roper Resources Ltd. Chris Roper Chris@RoperResources.com
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Advanced PMA Capabilities for MCM
 Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Advanced PMA Capabilities for MCM Shorten the sensor-to-shooter timeline New sensor technology deployed on off-board underwater systems provides navies with improved imagery and data for the purposes of
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology
 How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
How well do CMIP5 climate models reproduce Southern Ocean bottom temperature? Model climatology (colours) plus August (dashed) & February (solid) sea ice edge. Heuzé et al. (2013, GRL) Autosub autonomous
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Using AUVs in Under-Ice Scientific Missions
 Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Using AUVs in Under-Ice Scientific Missions James Ferguson, International Submarine Engineering Ltd. Presented at Arctic Change 08 11 Decenber 2008- Quebec City, Canada 1/16 ISE s s Experience in Arctic
Testing and Evaluation of REMUS Vehicle Systems
 Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Unmanned Maritime Vehicle Test and Evaluation Conference AUV Fest 2005 June 14, 2005 Testing and Evaluation of REMUS Vehicle Systems Christopher von Alt Hydroid, Inc. www.hydroidinc.com Hydroid Inc. holds
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
An accident at sea, such as an
 Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
Littoral water survey and security Surveying by Claude Cazaoulou, ECA More than 90% of international commercial exchange and 70% of annual world oil consumption are transported by sea. Millions of people
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico
 NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
NOAA s Underwater UXO Demonstration Projects Vieques Island, Puerto Rico Vieques Restoration Advisory Board Meeting May 7, 2008 Jason Rolfe NOAA s Office of Response & Restoration NOAA s Underwater UXO
General Dynamics Canada Whitepaper. Abstract
 Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
Advanced Robotics for Next generation Mine Countermeasures Abstract Maritime mines are one of the most cost effective weapons in the naval arsenal. They deny access to coastal zones, thereby seriously
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks
 In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
UNDERWATER SERVICES COMPANY PROFILE
 UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
UNDERWATER SERVICES COMPANY PROFILE irov Underwater Services is an Italian Independent H i g h l y S p e c i a l i z e d C o m p a n y p r o v i d i n g underwater technology and ROV assistance to Salvage
SEAHORSES and SUBMARINES Testing transformational capabilities with modern UUVs at NAVOCEANO by Craig A. Peterson and Martha E. M.
 SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
SEAHORSE engineers work on a module inside one AUV of the SEAHORSE 2 bays. SEAHORSE 2 is being prepared for launch from the IC-508 AUV Support Vessel. SEAHORSES and SUBMARINES Testing transformational
UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016
 SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
SUCCESS YOU CAN MEASURE UTEC Survey Pipeline Inspection Using Low Logistic AUV June 2016 Chris Erni Product Line Manager E T H I C S P E R F O R M A N C E E X C E L L E N C E P E O P L E GLOBAL FOOTPRINT
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles
 Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
Dual-Frequency Acoustic Camera: A Candidate for an Obstacle Avoidance, Gap-Filler, and Identification Sensor for Untethered Underwater Vehicles Edward O. Belcher, Warren L. J. Fox, and William H. Hanot
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
MISSION PLANNING AND DATA ACQUISITION SOFTWARE
 MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
INTERNATIONAL HYDROGRAPHIC REVIEW MAY 2015
 OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC)
") USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC) BAA Number: HSCG32-07-R-R00013 Title of Proposal: Heavy Oil Tracking Tactics, Techniques
USCG Development Proposal: Heavy Oil Tracking Tactics, Techniques and Procedures Presented to: Ms. Brenda M. Burke (RDC) BAA Number: HSCG32-07-R-R00013 Title of Proposal: Heavy Oil Tracking Tactics, Techniques
Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001
 Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001 Anthony J. Healey David B. Marco Center for Autonomous Underwater Vehicle Research Naval Postgraduate School Monterey, CA phone: (831)-656-3462
Hydro-Thermal Vent Mapping with Multiple AUV's AZORES-2001 Anthony J. Healey David B. Marco Center for Autonomous Underwater Vehicle Research Naval Postgraduate School Monterey, CA phone: (831)-656-3462
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle
 Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Shallow Water Bathymetry using the REMUS 100 Autonomous Underwater Vehicle Michael Bell Maritime Division Defence Science and Technology Organisation DSTO-TR-2916 ABSTRACT This report describes assessments
Sensors and Platforms for Autonomous Undersea Systems
 Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
Sensors and Platforms for Autonomous Undersea Systems Robert C. Spindel Applied Physics Laboratory University of Washington 1013 NE 40 th Street Seattle, WA 98105 USA spindel@apl.washington.edu 206 543
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey
 The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
The Evolution of an Autonomous Unmanned Surface Vessel and Software for Hydrographic Survey Paul Donaldson In 2017, Leidos, Inc. participated in both the Gulf of Mexico Unmanned Systems Operational Demonstration
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson
 Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Advantages of Using Combined Bathymetry and Side Scan Data in Survey Processing T.M. Hiller, L.N. Brisson EdgeTech, West WareHam MA, USA EdgeTech 6205 Combined Bathymetric and Side Scan Sonar EdgeTech
Autonomous Underwater Vehicles Explorer Class
 Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
Autonomous Underwater Vehicles Explorer Class Neil Bose Professor of Maritime Hydrodynamics Manager, Australian Maritime Hydrodynamics Research Centre AMC National Centre for Maritime Engineering and Hydrodynamics
History/Explorers/Expeditions/Technology Webquest!
 Name Block History/Explorers/Expeditions/Technology Webquest! http://www.divediscover.whoi.edu/history-ocean/21st.html Click on: History of Oceanography (on the left side of the page) 1. Oceanography may
Name Block History/Explorers/Expeditions/Technology Webquest! http://www.divediscover.whoi.edu/history-ocean/21st.html Click on: History of Oceanography (on the left side of the page) 1. Oceanography may
Understanding the Dynamics of Shallow-Water Oceanographic Moorings
 Understanding the Dynamics of Shallow-Water Oceanographic Moorings Mark A. Grosenbaugh Department of Applied Ocean Physics & Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543 phone:
Understanding the Dynamics of Shallow-Water Oceanographic Moorings Mark A. Grosenbaugh Department of Applied Ocean Physics & Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543 phone:
Sea Search Operations AF 447 A February 2010
 Sea Search Operations AF 447 A330-203 17 February 2010 Search Phases Phase 1 : Acoustic search for Underwater Locator Beacons (10 June to 10 July in the search zone) Phase 2 : Search for the wreckage using
Sea Search Operations AF 447 A330-203 17 February 2010 Search Phases Phase 1 : Acoustic search for Underwater Locator Beacons (10 June to 10 July in the search zone) Phase 2 : Search for the wreckage using
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys
 MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
MOOS IvP Helm Based Simulations of Collision Avoidance by an Autonomous Surface Craft Performing Repeat-Transect Oceanographic Surveys Michael A. Filimon Dept. of Ocean Engineering Daniel L. Codiga Grad.
RAMSTM. 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs
 RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
RAMS 360 Riser and Anchor-Chain Integrity Monitoring for FPSOs Introduction to RAMS Tritech s RAMS is a 360 anchor-chain and riser integrity monitoring system for Floating Production Storage and Offloading
Tools of Oceanography Ocean Currents. Drift Bottles and Dyes: measures speed and direction of ocean currents.
 Tools of Oceanography Ocean Currents Drift Bottles and Dyes: measures speed and direction of ocean currents. Ekman Current Meters: measures speed and direction of currents in deep water. Ocean Water Sampling
Tools of Oceanography Ocean Currents Drift Bottles and Dyes: measures speed and direction of ocean currents. Ekman Current Meters: measures speed and direction of currents in deep water. Ocean Water Sampling
Department. «Ships and on-board Equipment» lfremer. (Head : Marc Nokin)
") Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Department «Ships and on-board Equipment» (Head : Marc Nokin) 1 Structuration and activities of NSE department Scope Construction and modernisation of Ifremer oceanographic ships Development of softwares
Producing Chart Data from Interferometric Sonars on Small AUVs
 Producing Chart Data from Interferometric Sonars on Small AUVs Tom Hiller 1, Thomas B. Reed IV 2, Arnar Steingrimsson 3 1: Thurne Hydrographic Ltd., Norwich, UK. 2: OIC Inc., Honolulu, Hawaii, USA. 3:
Producing Chart Data from Interferometric Sonars on Small AUVs Tom Hiller 1, Thomas B. Reed IV 2, Arnar Steingrimsson 3 1: Thurne Hydrographic Ltd., Norwich, UK. 2: OIC Inc., Honolulu, Hawaii, USA. 3:
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE
 SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
SUBSEA TECHNOLOGY SHIPSYSTEMS POSITION,TRACK, NAVIGATE, PROTECT, COMMUNICATE POSITIONING NAVIGATION COMMUNICATION MONITORING IMAGING OUR COMPANY WE POSITION, WE NAVIGATE, WE TRACK, WE SECURE. YOU MAY NOT
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping
 Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
Location: Barkley Canyon Date: September 9, 2013 Constraints: none
 Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
MAPCO2 Buoy Metadata Report Project Title:
 MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
A Distributed Control System using CAN bus for an AUV
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
BUYER S GUIDE AQUAlogger 530WTD
 OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
PropaGator Autonomous Surface Vehicle
 PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
PropaGator Autonomous Surface Vehicle Andrew Wegener December 4, 2012 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Final Report Instructors: A. Antonio Arroyo,
BUYER S GUIDE AQUAlogger 520
 OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 520 Mini Temperature and Pressure Logger AQUAlogger 520 Aquatec s primary temperature and depth model, the AQUAlogger 520, combines years of product development
OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 520 Mini Temperature and Pressure Logger AQUAlogger 520 Aquatec s primary temperature and depth model, the AQUAlogger 520, combines years of product development
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP
 Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Model-based Adaptive Acoustic Sensing and Communication in the Deep Ocean with MOOS-IvP Henrik Schmidt & Toby Schneider Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
WG Marine Intruder Detection Sonar
 fire safety security defence The Westminster Marine Intruder Detection Sonar (WG MIDS) system is a single- or multi-head active sonar system designed to automatically detect and track underwater and surface
fire safety security defence The Westminster Marine Intruder Detection Sonar (WG MIDS) system is a single- or multi-head active sonar system designed to automatically detect and track underwater and surface
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
RJE celebrates 25 Years
 Q3 September 2016 RJE celebrates 25 Years This has been an exciting year for RJE International. We entered our 25th year in business with the roll out of several new product launches, additions to our
Q3 September 2016 RJE celebrates 25 Years This has been an exciting year for RJE International. We entered our 25th year in business with the roll out of several new product launches, additions to our
Marine Opera*ons Group Marine Technology Program SRI Interna*onal SRI International
 Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft.
Marine Opera*ons Group Marine Technology Program SRI Interna*onal 2012 SRI International Facili*es SRI s Tampa Bay harbor- side facility accommodates a variety of opera*ons and tes*ng requirements 450-ft.
Marine Mammal Acoustic Tracking from Adapting HARP Technologies
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Marine Mammal Acoustic Tracking from Adapting HARP Technologies Sean M. Wiggins and John A. Hildebrand Marine Physical
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Marine Mammal Acoustic Tracking from Adapting HARP Technologies Sean M. Wiggins and John A. Hildebrand Marine Physical
ATON System Workshop
 ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
ATON System Workshop ATON System: Real-time current measurements from Coast Guard navigation buoys in ports, bays and the coastal ocean Aid-to-Navigation = ATON ATON System Workshop Outline: Overview of
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Monetisation of sustainable business models for Satellite Derived Bathymetry
 Monetisation of sustainable business models for Satellite Derived Bathymetry Who are we? We are a UK & UAE based company specialising in satellite derived seabed & environmental mapping products We aim
Monetisation of sustainable business models for Satellite Derived Bathymetry Who are we? We are a UK & UAE based company specialising in satellite derived seabed & environmental mapping products We aim
Exploration of Underwater Volcano by Autonomous Underwater Vehicle
 Exploration of Underwater Volcano by Autonomous Underwater Vehicle Tamaki Ura Institute of Industrial Science, the University of Tokyo ura@iis.u-tokyo.ac.jp, 4-6-1, Komaba, Meguro, Tokyo 153-8505 Japan
Exploration of Underwater Volcano by Autonomous Underwater Vehicle Tamaki Ura Institute of Industrial Science, the University of Tokyo ura@iis.u-tokyo.ac.jp, 4-6-1, Komaba, Meguro, Tokyo 153-8505 Japan
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
"Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider"
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. "Real-Time Vertical Temperature, and Velocity Profiles from a Wave Glider" Luca Centurioni Scripps Institution of Oceanography
Chemical Plume Mapping with an Autonomous Underwater Vehicle
 Chemical Plume Mapping with an Autonomous Underwater Vehicle Barbara Fletcher Space and Naval Warfare Systems Center San Diego (SSC San Diego) 49590 Lassing Road San Diego, CA 92152 (619) 553-3859 bfletch@spawar.navy.mil
Chemical Plume Mapping with an Autonomous Underwater Vehicle Barbara Fletcher Space and Naval Warfare Systems Center San Diego (SSC San Diego) 49590 Lassing Road San Diego, CA 92152 (619) 553-3859 bfletch@spawar.navy.mil
Challenges in determining water surface in airborne LiDAR topobathymetry. Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014
 Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
Copicut Reservoir Sidescan Sonar. Fall River, MA May 7, 2013
 Copicut Reservoir Sidescan Sonar Fall River, MA May 7, 2013 1 Table of Contents Section 1: Mission Overview... 3 Background... 3 Vehicle General Information... 3 Vehicle Mission Details... 4 Area of Operation...
Copicut Reservoir Sidescan Sonar Fall River, MA May 7, 2013 1 Table of Contents Section 1: Mission Overview... 3 Background... 3 Vehicle General Information... 3 Vehicle Mission Details... 4 Area of Operation...
API Study on Detection and Recovery of Sunken Oil. API Study Objectives
 API Study on Detection and Recovery of Sunken Oil Jacqueline Michel, Research Planning, Inc. Mark Ploen, QualiTech Jim Elliott, T&T Marine Salvage, Inc. William Key API Study Objectives 1. ID current best
API Study on Detection and Recovery of Sunken Oil Jacqueline Michel, Research Planning, Inc. Mark Ploen, QualiTech Jim Elliott, T&T Marine Salvage, Inc. William Key API Study Objectives 1. ID current best
Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results
 Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results J. Vaganay, M. Elkins, D. Esposito, W. O Halloran (1) F. Hover, M. Kokko (2) Bluefin Robotics Corporation (1) Massachusetts Institute
Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results J. Vaganay, M. Elkins, D. Esposito, W. O Halloran (1) F. Hover, M. Kokko (2) Bluefin Robotics Corporation (1) Massachusetts Institute
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities
 Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
Environmental Threats from Wrecks: The Point of View of the Environmental Authorities Syke-BALEX Seminar on Wrecks as Environmental Risks: The Legal Framework Jorma Rytkönen, Finnish Environment Institute
NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader Community
 Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
SeaSmart. Jonathan Evans
 SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
SeaSmart A new approach for rapid, on-site resource assessment at potential tidal stream energy array sites using MAS Marine Solutions for the Deep Data World Jonathan Evans Presentation Outline Marine
Regional Hydrographic Research, Studies & Projects
 Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
Regional Hydrographic Research, Studies & Projects Support from Unique Maritime Group A. Sharad Kumar Regional Manager - UMG RSAHC5 Riyadh, 6 th March 2013 1. Introduction to UMG 2. Group Competencies
Survey Technique for Underwater Digital Photography with Integrated GPS Location Data
 Survey Technique for Underwater Digital Photography with Integrated GPS Location Data Tim Siwiec: United States Environmental Protection Agency Abstract This survey technique is an inexpensive method of
Survey Technique for Underwater Digital Photography with Integrated GPS Location Data Tim Siwiec: United States Environmental Protection Agency Abstract This survey technique is an inexpensive method of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling
 Underwater Acoustic Imaging and Profiling") High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
High Definition Laser Scanning (HDS) Underwater Acoustic Imaging and Profiling Images at Depth: The Use of Acoustic Imaging on Large River Crossings A Case Study AGENDA Background of project Review of
Institute of Marine Research
 Institute of Marine Research CRUISE REPORT NO. ** R/V G.O. Sars Cruise No. 2005108 9 th June 24 th June 2005 Coral survey off Northern Norway Principal Scientist J. H. Fosså 2005 Benthic Habitat Research
Institute of Marine Research CRUISE REPORT NO. ** R/V G.O. Sars Cruise No. 2005108 9 th June 24 th June 2005 Coral survey off Northern Norway Principal Scientist J. H. Fosså 2005 Benthic Habitat Research
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge
 Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge (Computer Aided Sound speed Technology) Derrick R. Peyton, Steven Smyth, Arnold Furlong ODIM Brooke Ocean Jonathan Beaudoin
Optimizing Sound Speed Profiling to Meet TPU Requirements using a CAST Gauge (Computer Aided Sound speed Technology) Derrick R. Peyton, Steven Smyth, Arnold Furlong ODIM Brooke Ocean Jonathan Beaudoin
Chapter 9: Sea operations
 Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Chapter 9: Sea operations ANTARES takes advice from IFREMER for the sea operations, which concern the installation and recovery of the different components of the detector : Junction Box, Strings, Interconnecting
Chapter 1. The Science of Marine Biology - Why is it important? Marine Biology. The scientific study of the organisms that live in the sea
 Chapter 1 The Science of Marine Biology - Why is it important? Marine Biology Marine Biology - The scientific study of the organisms that live in the sea 1 Practical Reasons to study marine biology Vast
Chapter 1 The Science of Marine Biology - Why is it important? Marine Biology Marine Biology - The scientific study of the organisms that live in the sea 1 Practical Reasons to study marine biology Vast
Body Search and Recovery Using Sonar
 Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
NEW SURVEY MOTOR LAUNCHES FOR THE ROYAL AUSTRALIAN NAVY
 International Hydrographic Review, Monaco, LXVI(l), January 1989 NEW SURVEY MOTOR LAUNCHES FOR THE ROYAL AUSTRALIAN NAVY by Commander John LEECH, RAN (*) INTRODUCTION By any standards the task facing the
International Hydrographic Review, Monaco, LXVI(l), January 1989 NEW SURVEY MOTOR LAUNCHES FOR THE ROYAL AUSTRALIAN NAVY by Commander John LEECH, RAN (*) INTRODUCTION By any standards the task facing the
Ocean Observing Systems Summer Teacher Institute August 10 August 14, 2009
 OOS? What s that?? COSEE-West 2008 Ocean Observing Systems Summer Teacher Institute Resources/Lesson Plans http://www.usc.edu/org/cosee-west/resources.html#aug08 Teacher created lesson plans from 2008
OOS? What s that?? COSEE-West 2008 Ocean Observing Systems Summer Teacher Institute Resources/Lesson Plans http://www.usc.edu/org/cosee-west/resources.html#aug08 Teacher created lesson plans from 2008
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System
 Light Fiber Tether System") Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle (HROV) Light Fiber Tether System Barbara Fletcher Chris Young James Buescher Space and Naval Warfare Systems Center San Diego, CA
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements
 Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
Meeting the Challenges of the IHO and LINZ Special Order Object Detection Requirements Erik Hammerstad Kongsberg Maritime P. O. Box 111, N-3191 Horten, Norway erik.oscar.hammerstad@kongsberg.com Abstract
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL
 ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
ROBOTICS AND AUTONOMOUS SYSTEMS in EXPLOSIVE ORDNANCE DISPOSAL LCdr John Keenan Joint Counter Explosive Threat Task Force Defeat the Device (DTD-2) John.keenan@forces.gc.ca DEFINING THE PROBLEM THE MISSION
Background Paper: Surveys. Nord Stream 2 AG Sep-17
 Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Nord Stream 2 AG Sep-17 Table of Contents Introduction... 3 Advanced Technology... 4 Survey Stages... 4 2 Introduction Survey operations are the cornerstone of massive international infrastructure projects
Autonomy in the Open <Click Here to Download>
 Autonomy in the Open March 29th, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering Laboratory for Autonomous Marine Sensing Systems Computer Science and
Autonomy in the Open March 29th, 2017 Michael R. Benjamin Henrik Schmidt MIT Dept. of Mechanical Engineering Laboratory for Autonomous Marine Sensing Systems Computer Science and
MEASUREMENT COMMUNICATION INSIGHT
 Temperature & Depth MEASUREMENT COMMUNICATION INSIGHT CONTENTS Introduction to Aquatec Measuring Temperature and Depth 2 3 Aquatec s Temperature and Depth Loggers AQUAlogger 520 AQUAlogger 530 AQUAlogger
Temperature & Depth MEASUREMENT COMMUNICATION INSIGHT CONTENTS Introduction to Aquatec Measuring Temperature and Depth 2 3 Aquatec s Temperature and Depth Loggers AQUAlogger 520 AQUAlogger 530 AQUAlogger
A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING
 A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING By Marian Copilet, Durham Pipeline Technology Ltd., Gateshead, UK & Prof. Ernie Appleton, University of Durham 1. ABSTRACT This paper discusses
A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING By Marian Copilet, Durham Pipeline Technology Ltd., Gateshead, UK & Prof. Ernie Appleton, University of Durham 1. ABSTRACT This paper discusses
Hydrographic Surveying Methods, Applications and Uses
 Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Figure 8: Buoyancy Force and Weight Acting on an Object
 Working in Water 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and operation
Working in Water 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and operation
Near-bottom Multibeam Surveys for Deep Sea Scientific Applications
 Near-bottom Multibeam Surveys for Deep Sea Scientific Applications Scott J. McCue Dana R. Yoerger Dept of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543
Near-bottom Multibeam Surveys for Deep Sea Scientific Applications Scott J. McCue Dana R. Yoerger Dept of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA 02543