Locomotion. CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2017
|
|
|
- Bertram Harper
- 5 years ago
- Views:
Transcription
1 Locomotion CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2017
2 Legged Locomotion

3 Muybridge Eadweard Muybridge Animal Locomotion Animals in Motion The Human Figure in Motion
4 Gaits A gait refers to a particular sequence of lifting and placing the feet during legged locomotion (gallop, trot, walk, run ) Each repetition of the sequence is called a gait cycle The time taken in one complete cycle is the gait period The inverse of the period is the gait frequency (1/period) Normally, in one gait cycle, each leg goes through exactly one complete step cycle
5 Gait Phase We can think of the gait phase a value that ranges from 0 to 1 as the gait cycle proceeds We can choose 0 as being any arbitrary point within the cycle (such as when the back left foot begins its step) The phase is like a clock that keeps going round and round (0 1, 0 1, 0 1) For a particular gait, the stepping of the legs and all other motion of the character can be described relative to the gait phase
6 Step Cycle In one gait cycle, each individual leg goes through a complete step cycle Each leg s step cycle is phase shifted relative to the main gait cycle The step cycle is broken into two main stages Support stage (foot on ground) Transfer stage (foot in the air) The amount of time a leg spends in the support stage is the support duration (& likewise for transfer duration) S u p p o rt D u r a t io n T ra n sf e rd u ra t io n G a it P e rio d
7 Duty Factor The relative amount of time a foot spends on the ground is called the duty factor DutyFactor SupportDuration GaitPeriod For a human walking, the duty factor will be greater than 0.5, indicating that there is an overlap time when both feet are on the ground For a run, the duty factor is less than 0.5, indicating that there is a time when both feet are in the air and the body is undergoing ballistic motion
8 Step Phase The step phase is a value that ranges from 0 to 1 during an individual leg s step cycle We can choose 0 to indicate the moment when the foot begins to lift (i.e., the beginning of the transfer phase) The foot contacts the ground and comes to rest when the phase equals 1 minus the duty factor
9 Step Trigger Each leg s step cycle is phase shifted relative to the main gait cycle This phase shift is called the step trigger The trigger is the phase within the main gait cycle where a particular leg begins its step cycle.0.5 Biped Walk
10 Locomotion Terminology Gait Gait cycle Gait period Gait frequency Gait phase Stepping Step cycle Step phase Support stage, support duration Transfer stage, transfer duration Duty factor Step trigger
11 Gait Description A simple description of the timing of a particular gait requires the following information Number of legs Gait period Duty factor & step trigger for each leg
12 Animal Gaits
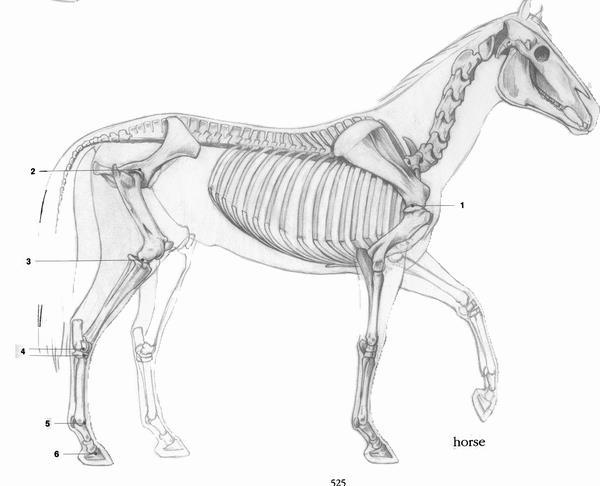
13 Ancestral Tetrapods All land based vertebrates evolved from an original tetrapod ancestor The tetrapod was like a primitive reptile- closer to a fish The 4 legs were adaptations of swimming fins and the creature moved on land by a combination of paddling with its legs and swimming with it s spine All present day quadruped vertebrates are based on the same underlying construction, but with various adaptations Even snakes, birds, dolphins, and whales evolved from the ancestral tetrapod and still show many similarities
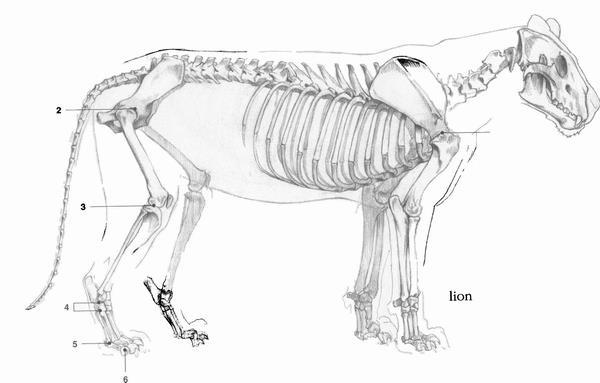
14 Quadruped Construction Arms Clavicle Scapula Humerus Radius/Ulna Carpals Metacarpals Phalanges Legs Pelvis Femur Tibia/Fibula Tarsals Metatarsals Phalanges


15 Quadrupeds
 Smaller or stockier")
 Larger animals tend to walk with straighter")
16 Stances Some animals, such as humans and bears walk flat footed (palmate) Some, like horses and cattle walk more on their fingers (digitate) Smaller or stockier animals sometimes walk with wide stances (sprawling gaits) (these include insects, many reptiles, and some small mammals) Larger animals tend to walk with straighter legs
17 Quadruped Gaits Quadruped: 4 legs Muybridge showed that almost all quadrupeds use one or more of the following gaits Walk Amble Trot Rack/Pace Gallop (rotary & transverse) Canter
 Actual timing of walk gaits may vary from the diagram.25.0 Walk.")
18 Quadruped Walk The basic slow gait of most quadrupeds is the walk Very slow walks may involve 3-4 legs on the ground, but normal walks involve 3 legs on the ground with a brief moment with only 2 The duty factor is therefore relatively high (.6 ~.8) Actual timing of walk gaits may vary from the diagram.25.0 Walk.75.5


19 Walks
20 Amble Ambles are like a quicker version of the walk, but are also associated with larger, slow moving quadrupeds The duty factor is often in the.5 ~.7 range, but some horses amble at even lower duty factors Elephants use the amble gait exclusively. The front and back legs are often very close in phase (shifted by around.1 or so) The gait often involves a noticeable swinging of the body from left to right.2.0 Amble.7.5
 and there are moments where all 4 legs are off the ground (actually, cats sometimes trot at a higher duty factor ) Before Muybridge, most horse trainers believed a trotting horse always had at")
21 Trot The trot is a medium paced gait where alternate diagonal legs step nearly in sync (though often slightly led by the forefoot) The duty factor is usually relatively low (<.4) and there are moments where all 4 legs are off the ground (actually, cats sometimes trot at a higher duty factor ) Before Muybridge, most horse trainers believed a trotting horse always had at least one foot on the ground.5.0 Trot.0.5
22 Pace / Rack The rack or pace has similar qualities to the trot, but horses are rarely trained to perform this gait This gait is considered to be the least comfortable for a rider, but supposedly offers better traction than the trot Most camels use this as their primary gait.0.0 Pace / Rack.5.5
23 Canter Unlike the first 4 quadruped gaits we looked at, the canter is asymmetrical The canter is a medium speed gait, but a bit irregular and not usually used for long intervals Some horses canter as they slow down from a gallop Sometimes, the timing of the canter is more like.6,.0,.0,.1, with 3 legs stepping in rapid succession, alternating with the 4th leg.7.0 Canter.0.3
24 Transverse Gallop The gallop is the fastest quadruped gait The gallop involves an alternation between the front and back pairs of legs, but slightly out of sync There are several subtle variations on gallops, but they are generally separated into transverse and rotary gallops Horses tend to prefer the transverse gallop, as do most other quadrupeds Transverse Gallop
25 Rotary Gallop Rotary gallops involve a circular LR-RL timing (as opposed to the zig-zagging LR-LR timing of the transverse gallop) Many dogs use a rotary gallop at high speeds, as do a few other quadrupeds.6.0 Rotary Gallop.5.1
 gallops, the timing is like: back-front-pause After the front legs push off, all four legs are in the air.4.5.0.")
26 Equestrian Gallop Gallops can also be broken into either feline or equestrian types, based on the front/back timing For equestrian (horse-type) gallops, the timing is like: back-front-pause After the front legs push off, all four legs are in the air Equestrian Gallop


27 Feline Gallop For feline (cat-type) gallops, the timing is like: front-back-pause After the back legs push off, all four legs are in the air This sometimes known as a leaping gait.6.0 Feline Gallop.7.1

28 Bound Some quadrupeds gallop in such a way that the front and back pairs of legs are in sync This is known as a bounding gait.5.0 Bound.5.0
29 Hexapod Gaits Most adult insects are hexapods (6 legs) For slow movement, some use an off-sync back to front wave gait For faster movement, most insects use a tripod gait Occasionally, one encounters insects that run on their back 4 legs or even only their back 2 (cockroaches can do this )
30 Hexapod Gaits Off-sync back to front wave gait Tripod gait
31 Octapod Gaits Spiders are octapods (8 legs) They tend to have very similar gaits to hexapods Off-sync back to front wave gait for slow movement Quadrapod gait (not quadruped)
32 Octapod Gaits Off-sync back to front wave gait Quadrapod gait
33 Young Insect Gaits Younger insects (larva, grubs, caterpillars) don t tend to move around as well as the older ones Larva and grubs tend to wiggle & dig a lot Caterpillars use ON-sync back to front wave gaits
34 Caterpillar Gait On-sync back to front wave gait
35 Centipedes & Millipedes Centipedes & millipedes tend to use off-sync back to front wave type gaits with several waves Some species, however use a front to back wave gait When moving fast, their motion tends towards a tripod type gait, alternating between two different sets of three main support zones

36 Centipedes & Millipedes
37 Gait Transitions
38 Gait Efficiency

39 Walk to Trot

40 Trot to Gallop
41 Flying
42 Flight Modes Birds use a variety of flight modes that could be compared to gaits Ballistic Gliding Slow flapping Fast flapping Hovering Different types of birds tend to favor one mode or another and often switch between modes
43 Ballistic Flight Ballistic: This refers to the motion of a dead weight or ballast (i.e., parabolic motion) This would refer to a bird flying with the wings fully tucked, and so is obviously not sustainable for long periods Some birds (like finches) use a punctuated ballistic flight, where they briefly flap, then coast in a parabolic path, then flap again to coast the next parabola, etc.
 Some birds will briefly glide for a few seconds between flapping modes Soaring")
44 Gliding Gliding is a form of coasting where the wings are held relatively fixed and the tail performs minor course corrections In still air, steady state gliding motion will result in constant forward velocity and a gradual loss of altitude according to the glide ratio (horizontal distance / vertical distance) Some birds will briefly glide for a few seconds between flapping modes Soaring refers to the long term gliding flight that may use thermals or other updrafts to stay aloft for long periods without flapping (used by hawks, vultures, pelicans, etc.)

45 Slow Flapping Different flapping modes are characterized by the structure of the wake created in the airflow Slow flapping flight is characterized by a wake of separate vortex rings Also known as vortex-ring flight The wings typically move in a figure 8 pattern when viewed from the side

46 Fast Flapping Fast flapping is characterized by producing a wake of two separate but continuous vortices Also known as continuous vortex flight The wings may move in a more elliptical pattern when viewed from the side
47 Hovering Some birds are capable of hovering in place and maneuvering around more like a helicopter Hummingbirds achieve this with a special adaptation to the shoulder bone that allows it to achieve downward pressure on both the up and down stroke When hovering in place, the wings follow a flattened figure 8 pattern
48 Flocks Flocking is one of the more interesting bird behaviors and is related to herding of terrestrial animals, schooling of fish, and even human crowd behavior Flocking behavior has been used as a tool in computer animation since its introduction in 1987 by a classic paper by Craig Reynolds To model flocking behavior, individual animals only need be aware of a few of the closest other animals in their field of view In general, an individual tried to match the average velocity of its nearest neighbors and possibly move towards the center of mass of the nearest neighbors This combines with other motivations and perturbations to lead to the combined flock behavior




49 Flocks
50 Other Types of Locomotion




51 Swimming

52 Climbing & Brachiation
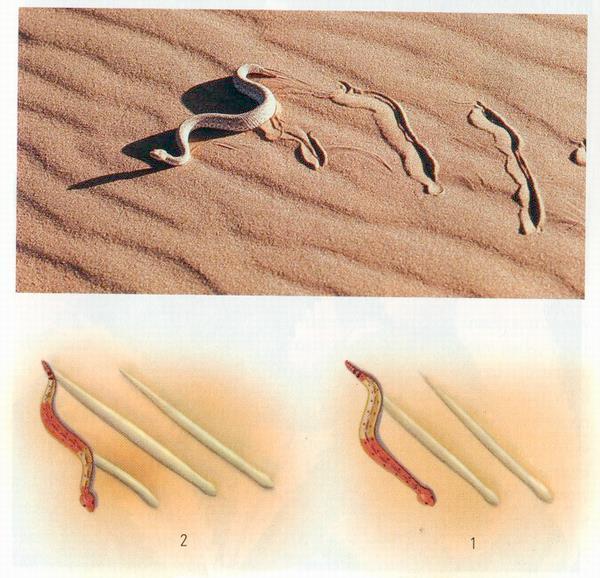

53 Slithering Concertina Sidewinding
54 Slithering Snakes Serpentine crawling: rapid front to back waves Sidewinding: front to back waves with strong lateral component. Often optimized for minimal ground contact Concertina locomotion: slower crawling front to back compressions Worms Stretch/squeeze: front to back squeezing/stretching waves
55 Analytical Inverse Kinematics
56 Analytical IK For some simple configurations, one can directly solve the inverse kinematics With some finesse, one can construct fairly elaborate analytical solvers even for complex configurations with redundancy We will just look at a simple example
57 Laws of Sines and Cosines Law of Sines: a b sin sin c sin c α β b a γ Law of Cosines: c 2 a 2 b 2 2ab cos
58 3-DOF Leg Consider a leg with a 2-DOF (XZ) hip joint and a 1-DOF (X) knee y y x z H X H Z View from behind K X View from right
59 Step 1: Find Unrotated Hip Matrix We start by computing a world matrix representing where the hip would be if it was in an unrotated state We make a translation matrix for the hip offset and multiply that with the parent s world matrix H 0 W parent T r W parent r r r x y z 1
60 Step 2: Transform Goal to Hip Space We want to transform the IK goal position relative to the unrotated hip space From this point on, we can solve the problem in this space g H 1 0 g world
61 Step 3: Find Knee Angle We will use the law of cosines to help us find the knee angle The length of the thigh & calf are assumed to be constant. They make up two sides of a triangle The third side of the triangle is made by the distance from the hip to the goal. As the hip pivot is located at [0 0 0] in hip space, we just take the distance to be the magnitude of g
62 Step 3: Find Knee Angle cos tlen clen g 2tlenclen 2 t len K X g K X c len
63 Step 4: Find Hip X Angle We find the hip X rotation by continuing with our triangle analysis We find the upper angle α in the triangle using the law of sines and then add that to the angle β to the goal Note: we are looking at the problem in the plane of the in the leg s bend (the plane normal to the knee rotation axis)
64 Step 4: Find Hip X Angle sin 1 sin 1 clen g z g sin g g t len H X g z c len
65 Step 5: Find Hip Z Angle We find the hip z angle by looking at the goal position (in hip space) in the XY plane H Z tan 1 g x g y y x g y H Z (View from behind) g x
66 Analytical IK Actually, the process is a little more complicated, as some of the equations may result in divide by zero s, square roots of negative numbers, or inverse trig functions with parameters outside of the legal range These cases indicate situations where there is no solution and may imply problems such as: Goal out of reach (further than t len +c len ) Goal too close (closer than t len -c len ) These cases should be checked and appropriate alternative solutions need to be designed to handle them
67 Bibliography Exploring Biomechanics: Animals in Motion, R. McNeill Alexander, 1992 Animals in Motion, Eadweard Muybridge, 1899 Cyclopedia Anatomicae, G. Feher, A. Szunyoghy, 1996 Animal Locomotion, A. Biewener, 2003 Computational Modeling for the Computer Animation of Legged Figures, M. Girard, A. Maciejewski, SIGGRAPH 1985
Walking and Running BACKGROUND REVIEW. Planar Pendulum. BIO-39 October 30, From Oct. 25, Equation of motion (for small θ) Solution is
 Solution is") Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
Walking and Running BIO-39 October 30, 2018 BACKGROUND REVIEW From Oct. 25, 2018 Planar Pendulum Equation of motion (for small θ) 2 d g 0 2 dt Solution is Where: g is acceleration due to gravity l is pendulum
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Richard Williams Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Robotics and Autonomous Systems Lecture 4: Locomotion Simon Parsons Department of Computer Science University of Liverpool 1 / 57 Today 2 / 57 Motion Two aspects: Locomotion Kinematics Locomotion: What
Complex movement patterns of a bipedal walk
 1 Complex movement patterns of a bipedal walk Objectives After completing this lesson, you will be able to: Describe the complex movement patterns of a bipedal walk. Describe the biomechanics of walking
1 Complex movement patterns of a bipedal walk Objectives After completing this lesson, you will be able to: Describe the complex movement patterns of a bipedal walk. Describe the biomechanics of walking
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Each copy of any part of a JSTOR transmission must contain the same copyright notice that appears on the screen or printed page of such transmission.
 Walking and Running Author(s): R. McNeill Alexander Source: The Mathematical Gazette, Vol. 80, No. 488 (Jul., 1996), pp. 262-266 Published by: The Mathematical Association Stable URL: http://www.jstor.org/stable/3619558
Walking and Running Author(s): R. McNeill Alexander Source: The Mathematical Gazette, Vol. 80, No. 488 (Jul., 1996), pp. 262-266 Published by: The Mathematical Association Stable URL: http://www.jstor.org/stable/3619558
Rochester Nordic Ski Team Ski Skill Checklist
 Rochester Nordic Ski Team Ski Skill Checklist Home position Home position is a way to get people to feel the basic body position that is used in skate skiing. It s a unique stance that isn t used in other
Rochester Nordic Ski Team Ski Skill Checklist Home position Home position is a way to get people to feel the basic body position that is used in skate skiing. It s a unique stance that isn t used in other
The Mechanics of Modern BREASTSTROKE Swimming Dr Ralph Richards
 The Mechanics of Modern BREASTSTROKE Swimming Dr Ralph Richards Breaststroke is the least efficient of the four competition strokes because a large amount of water resistance is created due to body position
The Mechanics of Modern BREASTSTROKE Swimming Dr Ralph Richards Breaststroke is the least efficient of the four competition strokes because a large amount of water resistance is created due to body position
Aerodynamic Terms. Angle of attack is the angle between the relative wind and the wing chord line. [Figure 2-2] Leading edge. Upper camber.
![Aerodynamic Terms. Angle of attack is the angle between the relative wind and the wing chord line. [Figure 2-2] Leading edge. Upper camber.](/thumbs/82/86661300.jpg "Aerodynamic Terms. Angle of attack is the angle between the relative wind and the wing chord line. [Figure 2-2] Leading edge. Upper camber.") Chapters 2 and 3 of the Pilot s Handbook of Aeronautical Knowledge (FAA-H-8083-25) apply to powered parachutes and are a prerequisite to reading this book. This chapter will focus on the aerodynamic fundamentals
Chapters 2 and 3 of the Pilot s Handbook of Aeronautical Knowledge (FAA-H-8083-25) apply to powered parachutes and are a prerequisite to reading this book. This chapter will focus on the aerodynamic fundamentals
Creative. dressage schooling. Enjoy the training process with 55 meaningful exercises Julia Kohl. German FN-licensed trainer and instructor
 Creative dressage schooling Enjoy the training process with 55 meaningful exercises Julia Kohl German FN-licensed trainer and instructor Rubrik rechts rot Contents Preface: How This Book Came to Be...vi
Creative dressage schooling Enjoy the training process with 55 meaningful exercises Julia Kohl German FN-licensed trainer and instructor Rubrik rechts rot Contents Preface: How This Book Came to Be...vi
Warm-up 1. Al 4 Bel y Lift 2. Calf Stretch
 Warm-up 1. All 4 Belly Lift 1. Position yourself on your hands and knees. 2. Maximally round your spine upward. 3. Tuck your hips under, feel abs engage. 4. Raise knees off floor until they are straight.
Warm-up 1. All 4 Belly Lift 1. Position yourself on your hands and knees. 2. Maximally round your spine upward. 3. Tuck your hips under, feel abs engage. 4. Raise knees off floor until they are straight.
Waves and Sound Final Review
 Name You will need to be able to: Waves and Sound Final Review 1) Describe parts of waves, use wave equation, and determine frequency and period. 2) Distinguish between transverse and longitudinal waves,
Name You will need to be able to: Waves and Sound Final Review 1) Describe parts of waves, use wave equation, and determine frequency and period. 2) Distinguish between transverse and longitudinal waves,
Techniques To Treat Your Pain At Home (512)
") Techniques To Treat Your Pain At Home (512) 288-5322 7010 W. TX-71 Suite 360 Austin TX, 78735 Arm Only Bird Dog Start in the quadruped position (all fours) with arms and thighs perpendicular to the floor.
Techniques To Treat Your Pain At Home (512) 288-5322 7010 W. TX-71 Suite 360 Austin TX, 78735 Arm Only Bird Dog Start in the quadruped position (all fours) with arms and thighs perpendicular to the floor.
BIOMECHANICAL MOVEMENT
 SECTION PART 5 5 CHAPTER 12 13 CHAPTER 12: Biomechanical movement Practice questions - text book pages 169-172 1) For which of the following is the athlete s centre of mass most likely to lie outside of
SECTION PART 5 5 CHAPTER 12 13 CHAPTER 12: Biomechanical movement Practice questions - text book pages 169-172 1) For which of the following is the athlete s centre of mass most likely to lie outside of
-Elastic strain energy (duty factor decreases at higher speeds). Higher forces act on feet. More tendon stretch. More energy stored in tendon.
. Higher forces act on feet. More tendon stretch. More energy stored in tendon.") As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
As velocity increases ( ) (i.e. increasing Froude number v 2 / gl) the component of the energy cost of transport associated with: -Internal kinetic energy (limbs accelerated to higher angular velocity).
Naval Special Warfare Combat Side Stroke Guide
 Naval Special Warfare Combat Side Stroke Guide Combat Side Stroke First Draft 1 MAR 2014 CONTENTS CHAPTER 1 COMBAT SIDE STROKE 1.1 OBJECTIVE 1.2 STROKE DESCRIPTION 1.3 BODY POSITION 1.4 PULL ARM 1.4.1
Naval Special Warfare Combat Side Stroke Guide Combat Side Stroke First Draft 1 MAR 2014 CONTENTS CHAPTER 1 COMBAT SIDE STROKE 1.1 OBJECTIVE 1.2 STROKE DESCRIPTION 1.3 BODY POSITION 1.4 PULL ARM 1.4.1
Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors of success in ball striking.
 Full Swing Analysis What are we trying to accomplish? Core Competencies in the Full Swing Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors
Full Swing Analysis What are we trying to accomplish? Core Competencies in the Full Swing Full swing technique is a pillar of a solid overall game. The following 4 core competencies are strong predictors
by Michael Young Human Performance Consulting
 by Michael Young Human Performance Consulting The high performance division of USATF commissioned research to determine what variables were most critical to success in the shot put The objective of the
by Michael Young Human Performance Consulting The high performance division of USATF commissioned research to determine what variables were most critical to success in the shot put The objective of the
Equiculture Publishing
 The gaits Even if you are an experienced rider please do not be tempted to skip this section about the gaits as you may miss a light bulb moment. Firstly it may be helpful for you to understand a couple
The gaits Even if you are an experienced rider please do not be tempted to skip this section about the gaits as you may miss a light bulb moment. Firstly it may be helpful for you to understand a couple
(2) BIOMECHANICS of TERRESTRIAL LOCOMOTION
 BIOMECHANICS of TERRESTRIAL LOCOMOTION") (2) BIOMECHANICS of TERRESTRIAL LOCOMOTION Questions: - How does size influence the mode and speed of locomotion? - What determines the energy cost of locomotion? - Why do humans walk and run the way we
(2) BIOMECHANICS of TERRESTRIAL LOCOMOTION Questions: - How does size influence the mode and speed of locomotion? - What determines the energy cost of locomotion? - Why do humans walk and run the way we
Swimming Glossary & Useful Information The Strokes
 Swimming Glossary & Useful Information The Strokes Freestyle (abv. Free or F/C) (UK: front-crawl) Freestyle is the fastest swimming stroke of all. It is used in open water and triathlon swimming. Strictly
Swimming Glossary & Useful Information The Strokes Freestyle (abv. Free or F/C) (UK: front-crawl) Freestyle is the fastest swimming stroke of all. It is used in open water and triathlon swimming. Strictly
Basic Movement Patterns Locomotor Skills 1.3
 Basic Movement Patterns Locomotor Skills 1.3 Jumping Forward & Sideways & Landing Extending Arms upward upon takeoff Arms Reach Full Extension about head height at lift off Extending the Hips, Knees, and
Basic Movement Patterns Locomotor Skills 1.3 Jumping Forward & Sideways & Landing Extending Arms upward upon takeoff Arms Reach Full Extension about head height at lift off Extending the Hips, Knees, and
Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a)
") Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a) Side and ventral images of adult female flies used to calculate the sizes of body and leg segments. Scale bar is 0.3 mm. Green,
Supplementary Figure 1 An insect model based on Drosophila melanogaster. (a) Side and ventral images of adult female flies used to calculate the sizes of body and leg segments. Scale bar is 0.3 mm. Green,
PSIA-RM Development Pathway - Alpine Skiing Standards
 Highlighted Skills PSIA-RM Development Pathway - Alpine Skiing Standards Fundamental Mechanics relative to the Skills Concept Pressure Control Rotational Control Edge Control Fore/Aft : Control the relationship
Highlighted Skills PSIA-RM Development Pathway - Alpine Skiing Standards Fundamental Mechanics relative to the Skills Concept Pressure Control Rotational Control Edge Control Fore/Aft : Control the relationship
A Different Approach to Teaching Engine-Out Glides
 A ifferent Approach to Teaching Engine-Out Glides es Glatt, Ph., ATP/CFI-AI, AGI/IGI When student pilots begin to learn about emergency procedures, the concept of the engine-out glide is introduced. The
A ifferent Approach to Teaching Engine-Out Glides es Glatt, Ph., ATP/CFI-AI, AGI/IGI When student pilots begin to learn about emergency procedures, the concept of the engine-out glide is introduced. The
Chapter 11 Waves. Waves transport energy without transporting matter. The intensity is the average power per unit area. It is measured in W/m 2.
 Energy can be transported by particles or waves: Chapter 11 Waves A wave is characterized as some sort of disturbance that travels away from a source. The key difference between particles and waves is
Energy can be transported by particles or waves: Chapter 11 Waves A wave is characterized as some sort of disturbance that travels away from a source. The key difference between particles and waves is
Level 1 Stroke Performance Criteria
 STROKE PERFORMANCE CHART Level 1 Stroke Performance Criteria Component Swim on Front (Combined Stroke Using Any Type of Arm or Leg Action) Swim on Back (Combined Stroke Using Any Type of Arm or Leg Action)
STROKE PERFORMANCE CHART Level 1 Stroke Performance Criteria Component Swim on Front (Combined Stroke Using Any Type of Arm or Leg Action) Swim on Back (Combined Stroke Using Any Type of Arm or Leg Action)
Coaching the Hurdles
 Coaching the Hurdles Monica Gary, Sprints & Hurdles Coach Purdue University Important components to consider in hurdle training: a. Rhythm for the hurdler is the primary concern for the coach -short rhythm
Coaching the Hurdles Monica Gary, Sprints & Hurdles Coach Purdue University Important components to consider in hurdle training: a. Rhythm for the hurdler is the primary concern for the coach -short rhythm
Principles of glider flight
 Principles of glider flight [ Lecture 2: Control and stability ] Richard Lancaster Email: Richard@RJPLancaster.net Twitter: @RJPLancaster ASK-21 illustrations Copyright 1983 Alexander Schleicher GmbH &
Principles of glider flight [ Lecture 2: Control and stability ] Richard Lancaster Email: Richard@RJPLancaster.net Twitter: @RJPLancaster ASK-21 illustrations Copyright 1983 Alexander Schleicher GmbH &
Designing a Model Rocket
 Designing a Model Rocket Design Components In the following pages we are going to look at the design requirements for a stable single stage model rocket. From the diagram here you can see that the rocket
Designing a Model Rocket Design Components In the following pages we are going to look at the design requirements for a stable single stage model rocket. From the diagram here you can see that the rocket
Performance tests and explanation of evaluation criteria IBOP RIDING TEST
 Performance tests and explanation of evaluation criteria IBOP RIDING TEST 1. A X - C Enter at working trot C Follow left track 2. A Large circle 3. H X F Change hands, and at X transition to working walk
Performance tests and explanation of evaluation criteria IBOP RIDING TEST 1. A X - C Enter at working trot C Follow left track 2. A Large circle 3. H X F Change hands, and at X transition to working walk
Lecture 9 - Locomotion I: Flight
 Lecture 9 - Locomotion I: Flight I. Powered flight has evolved independently many times in animals, but only once in mammals. It always involves a flight membrane and a support structure. A. Insects -
Lecture 9 - Locomotion I: Flight I. Powered flight has evolved independently many times in animals, but only once in mammals. It always involves a flight membrane and a support structure. A. Insects -
Instructor Worksheet
 Distance Swim 5m, 10m, 15m (Record distance each swimmer completes) Flutter Kick 15m Facility/Site Orientation Facility/Site Rules Shallow Water Entries and Exits Submerge Head and Exhale through Mouth
Distance Swim 5m, 10m, 15m (Record distance each swimmer completes) Flutter Kick 15m Facility/Site Orientation Facility/Site Rules Shallow Water Entries and Exits Submerge Head and Exhale through Mouth
Swimming practical examination support materials
 Swimming Curriculum Council, 2011 This document apart from any third party copyright material contained in it may be freely copied, or communicated on an intranet, for non-commercial purposes by educational
Swimming Curriculum Council, 2011 This document apart from any third party copyright material contained in it may be freely copied, or communicated on an intranet, for non-commercial purposes by educational
Chapter 11 Waves. Waves transport energy without transporting matter. The intensity is the average power per unit area. It is measured in W/m 2.
 Chapter 11 Waves Energy can be transported by particles or waves A wave is characterized as some sort of disturbance that travels away from a source. The key difference between particles and waves is a
Chapter 11 Waves Energy can be transported by particles or waves A wave is characterized as some sort of disturbance that travels away from a source. The key difference between particles and waves is a
Mobile Robots (Legged) (Take class notes)
 (Take class notes)") Mobile Robots (Legged) (Take class notes) Legged mobile robots Mobile robots are robots which can move There are two types of mobile robots - Legged two, four, six and eight legs - Wheeled one, two, three
Mobile Robots (Legged) (Take class notes) Legged mobile robots Mobile robots are robots which can move There are two types of mobile robots - Legged two, four, six and eight legs - Wheeled one, two, three
THE OHIO JOURNAL OF SCIENCE
 THE OHIO JOURNAL OF SCIENCE Vol. 72 JULY, 1972 No. 4 BODY FORM AND GAIT IN TERRESTRIAL VERTEBRATES 1 WARREN F. WALKER, JR. Department of Biology, Oberlin College, Oberlin, Ohio 44074 One appeal of pure
THE OHIO JOURNAL OF SCIENCE Vol. 72 JULY, 1972 No. 4 BODY FORM AND GAIT IN TERRESTRIAL VERTEBRATES 1 WARREN F. WALKER, JR. Department of Biology, Oberlin College, Oberlin, Ohio 44074 One appeal of pure
For Maneuver 5-Class I(Sportsman)-Stall Turn - The pull to vertical begins as the model crosses the centerline.
-Stall Turn - The pull to vertical begins as the model crosses the centerline.") 16.3 Contestants will automatically advance to the next class when they have accumulated the following points: Sportsman 90 points Advanced 120 points Advancement will occur at the end of the calendar
16.3 Contestants will automatically advance to the next class when they have accumulated the following points: Sportsman 90 points Advanced 120 points Advancement will occur at the end of the calendar
EVOLVING HEXAPOD GAITS USING A CYCLIC GENETIC ALGORITHM
 Evolving Hexapod Gaits Using a Cyclic Genetic Algorithm Page 1 of 7 EVOLVING HEXAPOD GAITS USING A CYCLIC GENETIC ALGORITHM GARY B. PARKER, DAVID W. BRAUN, AND INGO CYLIAX Department of Computer Science
Evolving Hexapod Gaits Using a Cyclic Genetic Algorithm Page 1 of 7 EVOLVING HEXAPOD GAITS USING A CYCLIC GENETIC ALGORITHM GARY B. PARKER, DAVID W. BRAUN, AND INGO CYLIAX Department of Computer Science
Kinematics errors leading to Ski Injuries (2015) Haleh Dadgostar MD Sports Medicine Specialist Iran University of Medical Sciences
 Haleh Dadgostar MD Sports Medicine Specialist Iran University of Medical Sciences") Kinematics errors leading to Ski Injuries (2015) Haleh Dadgostar MD Sports Medicine Specialist Iran University of Medical Sciences Alpine Ski Practice of skiing : 5000 years ago when early hunters and
Kinematics errors leading to Ski Injuries (2015) Haleh Dadgostar MD Sports Medicine Specialist Iran University of Medical Sciences Alpine Ski Practice of skiing : 5000 years ago when early hunters and
NAWGJ Education Committee
 September 2017 The following are line art illustrations of 10 different performance varieties of compulsory handspring vaults. These are by no means the only variations of this vault but may be among the
September 2017 The following are line art illustrations of 10 different performance varieties of compulsory handspring vaults. These are by no means the only variations of this vault but may be among the
Snowboarding Skills Handout
 MOVEMENTS We can make 2 independent body movements (Biomechanics). Flex and Extend Rotate Here a flexion of the ankle, knee, and hip are different than the extension of these joints in the second picture
MOVEMENTS We can make 2 independent body movements (Biomechanics). Flex and Extend Rotate Here a flexion of the ankle, knee, and hip are different than the extension of these joints in the second picture
Lesson 14: Simple harmonic motion, Waves (Sections )
") Circular Motion and Simple Harmonic Motion The projection of uniform circular motion along any ais (the -ais here) is the same as simple harmonic motion. We use our understanding of uniform circular motion
Circular Motion and Simple Harmonic Motion The projection of uniform circular motion along any ais (the -ais here) is the same as simple harmonic motion. We use our understanding of uniform circular motion
In parallel with steady gains in battery energy and power density, the coming generation of uninhabited aerial vehicles (UAVs) will enjoy increased
 will enjoy increased") In parallel with steady gains in battery energy and power density, the coming generation of uninhabited aerial vehicles (UAVs) will enjoy increased range, endurance, and operational capability by exploiting
In parallel with steady gains in battery energy and power density, the coming generation of uninhabited aerial vehicles (UAVs) will enjoy increased range, endurance, and operational capability by exploiting
THE INITIAL STAGE THE FINAL STAGE
 THE JAVELIN RUN-UP By Hans Torim A detailed description of the author s views on the javelin run-up from the initial stages to the impulse stride and the pre-delivery position. The article is a slightly
THE JAVELIN RUN-UP By Hans Torim A detailed description of the author s views on the javelin run-up from the initial stages to the impulse stride and the pre-delivery position. The article is a slightly
POWERED FLIGHT HOVERING FLIGHT
 Once a helicopter leaves the ground, it is acted upon by the four aerodynamic forces. In this chapter, we will examine these forces as they relate to flight maneuvers. POWERED FLIGHT In powered flight
Once a helicopter leaves the ground, it is acted upon by the four aerodynamic forces. In this chapter, we will examine these forces as they relate to flight maneuvers. POWERED FLIGHT In powered flight
Where are you right now? How fast are you moving? To answer these questions precisely, you
 4.1 Position, Speed, and Velocity Where are you right now? How fast are you moving? To answer these questions precisely, you need to use the concepts of position, speed, and velocity. These ideas apply
4.1 Position, Speed, and Velocity Where are you right now? How fast are you moving? To answer these questions precisely, you need to use the concepts of position, speed, and velocity. These ideas apply
19 Waves and Vibrations
 19 Waves and Vibrations Answers and Solutions for Chapter 19 Reading Check Questions 1. A wiggle in time is a vibration; a wiggle in space and time is a wave. 2. The source of all waves is a vibration.
19 Waves and Vibrations Answers and Solutions for Chapter 19 Reading Check Questions 1. A wiggle in time is a vibration; a wiggle in space and time is a wave. 2. The source of all waves is a vibration.
THERMALLING TECHNIQUES. Preface
 DRAFT THERMALLING TECHNIQUES Preface The following thermalling techniques document is provided to assist Instructors, Coaches and Students as a training aid in the development of good soaring skills. Instructors
DRAFT THERMALLING TECHNIQUES Preface The following thermalling techniques document is provided to assist Instructors, Coaches and Students as a training aid in the development of good soaring skills. Instructors
FACTORS OF DIFFICULTY IN SYNCHRONIZED SKATING
 FACTORS OF DIFFICULTY IN SYNCHRONIZED SKATING This document represents an updated version of the Chapter 3 in the second edition 1999 of Judges Handbook V, Synchronized Skating International Skating Union
FACTORS OF DIFFICULTY IN SYNCHRONIZED SKATING This document represents an updated version of the Chapter 3 in the second edition 1999 of Judges Handbook V, Synchronized Skating International Skating Union
A short description of the rowing stroke
 AN EXTRACT FROM MY FORTHCOMING BOOK A short description of the rowing stroke DRIVE 1 As the rower reaches this position at the end of the recovery the oar is placed in the water by lifting the hands, feel
AN EXTRACT FROM MY FORTHCOMING BOOK A short description of the rowing stroke DRIVE 1 As the rower reaches this position at the end of the recovery the oar is placed in the water by lifting the hands, feel
GaitAnalysisofEightLegedRobot
 GaitAnalysisofEightLegedRobot Mohammad Imtiyaz Ahmad 1, Dilip Kumar Biswas 2 & S. S ROY 3 1&2 Department of Mechanical Engineering, National Institute of Technology, Durgapur 2 Technology Innovation Centre,
GaitAnalysisofEightLegedRobot Mohammad Imtiyaz Ahmad 1, Dilip Kumar Biswas 2 & S. S ROY 3 1&2 Department of Mechanical Engineering, National Institute of Technology, Durgapur 2 Technology Innovation Centre,
x 2 = (60 m) 2 + (60 m) 2 x 2 = 3600 m m 2 x = m
 2 + (60 m) 2 x 2 = 3600 m m 2 x = m") 3.1 Track Question a) Distance Traveled is 1600 m. This is length of the path that the person took. The displacement is 0 m. The person begins and ends their journey at the same position. They did not
3.1 Track Question a) Distance Traveled is 1600 m. This is length of the path that the person took. The displacement is 0 m. The person begins and ends their journey at the same position. They did not
The Discus. By Al Fereshetian. Nature of the Event
 11 The Discus By Al Fereshetian Nature of the Event Because of the numerous diverse qualities necessary for success, the discus throw is one of the most complex events in all of track and field. Discus
11 The Discus By Al Fereshetian Nature of the Event Because of the numerous diverse qualities necessary for success, the discus throw is one of the most complex events in all of track and field. Discus
Creating animation rigs that solve problems, are fun to use, and don t cause nervous breakdowns.
 Animator Friendly Rigging Creating animation rigs that solve problems, are fun to use, and don t cause nervous breakdowns. - 1- CONTENTS Biped Legs... 5 Why Are Legs Important?... 6 Requirements for legs...
Animator Friendly Rigging Creating animation rigs that solve problems, are fun to use, and don t cause nervous breakdowns. - 1- CONTENTS Biped Legs... 5 Why Are Legs Important?... 6 Requirements for legs...
The Incremental Evolution of Gaits for Hexapod Robots
 The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
The Incremental Evolution of Gaits for Hexapod Robots Abstract Gait control programs for hexapod robots are learned by incremental evolution. The first increment is used to learn the activations required
Tail Roping 101. Teaching the finer aspects of rope handling. Jeff Cripps Central Division November 30, 2012
 Tail Roping 101 Teaching the finer aspects of rope handling Jeff Cripps Central Division November 30, 2012 Course Objective: Tail Roping 101 Develop better understanding of the skiing skills necessary
Tail Roping 101 Teaching the finer aspects of rope handling Jeff Cripps Central Division November 30, 2012 Course Objective: Tail Roping 101 Develop better understanding of the skiing skills necessary
Flight Corridor. The speed-altitude band where flight sustained by aerodynamic forces is technically possible is called the flight corridor.
 Flight Corridor The speed-altitude band where flight sustained by aerodynamic forces is technically possible is called the flight corridor. The subsonic Boeing 747 and supersonic Concorde have flight corridors
Flight Corridor The speed-altitude band where flight sustained by aerodynamic forces is technically possible is called the flight corridor. The subsonic Boeing 747 and supersonic Concorde have flight corridors
Using sensory feedback to improve locomotion performance of the salamander robot in different environments
 Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
Using sensory feedback to improve locomotion performance of the salamander robot in different environments João Lourenço Silvério Assistant: Jérémie Knüsel Structure of the presentation: I. Overview II.
Animals Big and Small: Skin and Guts
 Animals Big and Small: Skin and Guts What if elephants had small ears? A VOLUME AND SURFACE AREA PROJECT Activity 16-1: Skin and Guts Animal Definitions The following a definitions which fit the vast majority
Animals Big and Small: Skin and Guts What if elephants had small ears? A VOLUME AND SURFACE AREA PROJECT Activity 16-1: Skin and Guts Animal Definitions The following a definitions which fit the vast majority
Guided Uphill Arc Blue Groomed. Carved Uphill Arc Blue Groomed. Skate on Flat Terrain Green Groomed. Vertical Side Slip Blue Groomed
 The 3 task matrices describe skiing with specific application of different skill blends. Mastery of the tasks in the 3 matrices can help create versatile skiing. All tasks require skilled simultaneous
The 3 task matrices describe skiing with specific application of different skill blends. Mastery of the tasks in the 3 matrices can help create versatile skiing. All tasks require skilled simultaneous
REFINE DEVELOP INTRODUCE
 ESSEX Ski Racing Training Criteria This document aims to set out the criteria that athletes are encouraged to achieve in order to progress through each of the training groups that make up the training
ESSEX Ski Racing Training Criteria This document aims to set out the criteria that athletes are encouraged to achieve in order to progress through each of the training groups that make up the training
Critical Factors in the Shot Put
 Critical Factors in the Shot Put Operational Terminology By Michael Young Louisiana State University Flight phase: The duration of time where the athlete is moving towards the front of the throwing circle
Critical Factors in the Shot Put Operational Terminology By Michael Young Louisiana State University Flight phase: The duration of time where the athlete is moving towards the front of the throwing circle
INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING
 INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING Joseph P. Hunter 1, Robert N. Marshall 1,, and Peter J. McNair 3 1 Department of Sport and Exercise Science, The University of Auckland, Auckland,
INTERACTION OF STEP LENGTH AND STEP RATE DURING SPRINT RUNNING Joseph P. Hunter 1, Robert N. Marshall 1,, and Peter J. McNair 3 1 Department of Sport and Exercise Science, The University of Auckland, Auckland,
Gait Analysis of a Little Biped Robot. Received May 2015; accepted July 2015
 ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
ICIC Express Letters Part B: Applications ICIC International c216 ISSN 2185-2766 Volume 7, Number 5, May 216 pp. 1 6 Gait Analysis of a Little Biped Robot Chi-Sheng Tsai 1, Chen-Huei Hsieh 1, Wenning QIU
DUPLICATION PROHIBITED by copyright holder. 6 THE ROLE OF THE OUTSIDE LEG Engagement and Canter Transitions 98
 CONTENTS Foreword by CARL HESTER MBE 10 WHY I WROTE THIS BOOK 13 ACKNOWLEDGEMENTS 18 INTRODUCTION 21 1 BALANCE Questions and Answers 26 2 THE AIDS FOR IMPULSION Forward and Straight 44 3 REIN AIDS Ask
CONTENTS Foreword by CARL HESTER MBE 10 WHY I WROTE THIS BOOK 13 ACKNOWLEDGEMENTS 18 INTRODUCTION 21 1 BALANCE Questions and Answers 26 2 THE AIDS FOR IMPULSION Forward and Straight 44 3 REIN AIDS Ask
Gait Analysis of Wittenberg s Women s Basketball Team: The Relationship between Shoulder Movement and Injuries
 Gait Analysis of Wittenberg s Women s Basketball Team: The Relationship between Shoulder Movement and Injuries Katie Bondy Senior Presentation May 1 st 2013 Research Question Among basketball players,
Gait Analysis of Wittenberg s Women s Basketball Team: The Relationship between Shoulder Movement and Injuries Katie Bondy Senior Presentation May 1 st 2013 Research Question Among basketball players,
TECHNIQUE AND METHODOLOGY OF TRAINING IN SWIMMING CRAWL
 Selim Alili Tetovo, Macedonia UDK: 797.212.4 TECHNIQUE AND METHODOLOGY OF TRAINING IN SWIMMING CRAWL 1. INTRODUCTION As a father of modern crawl is considered Australia. The main feature of this mode of
Selim Alili Tetovo, Macedonia UDK: 797.212.4 TECHNIQUE AND METHODOLOGY OF TRAINING IN SWIMMING CRAWL 1. INTRODUCTION As a father of modern crawl is considered Australia. The main feature of this mode of
Investigative Study: Movement Analysis
 Investigative Study: Movement Analysis SAMPLE M Background Research Biomechanics can simply be described as the physics of sports. Biomechanics is the study of human motion. (Miller, Biomechanical Analysis
Investigative Study: Movement Analysis SAMPLE M Background Research Biomechanics can simply be described as the physics of sports. Biomechanics is the study of human motion. (Miller, Biomechanical Analysis
The Takeaway. The waggle can be an excellent opportunity to rehearse your takeaway
 The Takeaway Your approach to the ball is the final step over which you have total control. Once you actually start the swing, you need to depend on rhythm, tempo and balance to see you through the swing.
The Takeaway Your approach to the ball is the final step over which you have total control. Once you actually start the swing, you need to depend on rhythm, tempo and balance to see you through the swing.
The Golf Swing. The Fundamentals
 The Golf Swing The Fundamentals Fundamental #1 Grip & Set-Up The grip and set-up should be viewed as putting parts of a machine together. The right parts connected in the right way will allow the machine
The Golf Swing The Fundamentals Fundamental #1 Grip & Set-Up The grip and set-up should be viewed as putting parts of a machine together. The right parts connected in the right way will allow the machine
Purpose. Outline. Angle definition. Objectives:
 Disclosure Information AACPDM 69 th Annual Meeting October 21-24, 2015 Speaker Names: Sylvia Õunpuu, MSc and Kristan Pierz, MD Gait Analysis Data Interpretation: Understanding Kinematic Relationships Within
Disclosure Information AACPDM 69 th Annual Meeting October 21-24, 2015 Speaker Names: Sylvia Õunpuu, MSc and Kristan Pierz, MD Gait Analysis Data Interpretation: Understanding Kinematic Relationships Within
Real-time Horse Gait Synthesis
 Real-time Horse Gait Synthesis Ting-Chieh Huang Yi-Jheng Huang Wen-Chieh Lin Department of Computer Science National Chiao Tung University, Taiwan {tchuang,ichuang,wclin}@cs.nctu.edu.tw Abstract Horse
Real-time Horse Gait Synthesis Ting-Chieh Huang Yi-Jheng Huang Wen-Chieh Lin Department of Computer Science National Chiao Tung University, Taiwan {tchuang,ichuang,wclin}@cs.nctu.edu.tw Abstract Horse
Maneuver Descriptions
 2017-2018 Senior Pattern Association Section III Maneuver Descriptions NOTE: MANEUVER DESCRIPTIONS THAT FOLLOW ARE TAKEN VERBATIM FROM THE APPROPRIATE AMA RULE BOOKS FROM WHICH THE MANEUVERS WERE TAKEN.
2017-2018 Senior Pattern Association Section III Maneuver Descriptions NOTE: MANEUVER DESCRIPTIONS THAT FOLLOW ARE TAKEN VERBATIM FROM THE APPROPRIATE AMA RULE BOOKS FROM WHICH THE MANEUVERS WERE TAKEN.
Direct to your goal.
 RITTER DRESSAGE BUNDLE Arena GPS 1.0 & 1.1 Direct to your goal. Direct to your goal. T R RITTER DRESSAGE Arena Basics And Continuing Exercises 1.0 Preface Welcome to the Arena GPS So, for the first time
RITTER DRESSAGE BUNDLE Arena GPS 1.0 & 1.1 Direct to your goal. Direct to your goal. T R RITTER DRESSAGE Arena Basics And Continuing Exercises 1.0 Preface Welcome to the Arena GPS So, for the first time
Putting Report Details: Key and Diagrams: This section provides a visual diagram of the. information is saved in the client s database
 Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
Quintic Putting Report Information Guide Putting Report Details: Enter personal details of the client or individual who is being analysed; name, email address, date, mass, height and handicap. This information
LEVEL 1 SKILL DEVELOPMENT MANUAL
 LEVEL 1 SKILL DEVELOPMENT MANUAL Lesson Manual D A Publication Of The USA Hockey Coaching Education Program The USA Hockey Coaching Education Program is Presented By 1. Proper Stance: LESSON D-1 SPECIFIC
LEVEL 1 SKILL DEVELOPMENT MANUAL Lesson Manual D A Publication Of The USA Hockey Coaching Education Program The USA Hockey Coaching Education Program is Presented By 1. Proper Stance: LESSON D-1 SPECIFIC
Figure 1 Figure 1 shows the involved forces that must be taken into consideration for rudder design. Among the most widely known profiles, the most su
 THE RUDDER starting from the requirements supplied by the customer, the designer must obtain the rudder's characteristics that satisfy such requirements. Subsequently, from such characteristics he must
THE RUDDER starting from the requirements supplied by the customer, the designer must obtain the rudder's characteristics that satisfy such requirements. Subsequently, from such characteristics he must
PROPER PITCHING MECHANICS
 PROPER PITCHING MECHANICS While each pitcher is a different person and can display some individuality in his mechanics, everyone has similar anatomy (the same muscles, bones and ligaments in the same locations)
PROPER PITCHING MECHANICS While each pitcher is a different person and can display some individuality in his mechanics, everyone has similar anatomy (the same muscles, bones and ligaments in the same locations)
Swimming Breaststroke Checklist Marion Alexander, Yumeng Li, Adam Toffan, Biomechanics Lab, U of Manitoba
 Swimming Breaststroke Checklist Marion Alexander, Yumeng Li, Adam Toffan, Biomechanics Lab, U of Manitoba Glide: -The feet come together, with the hips and knees fully extended. The legs may not be closed
Swimming Breaststroke Checklist Marion Alexander, Yumeng Li, Adam Toffan, Biomechanics Lab, U of Manitoba Glide: -The feet come together, with the hips and knees fully extended. The legs may not be closed
Playing Catch - Throwing The Baseball
 Playing Catch - Throwing The Baseball Entire Body When kids are taught to throw, often the instruction is watered down into just a couple of steps. The act of throwing a baseball is not that simple. Throwing
Playing Catch - Throwing The Baseball Entire Body When kids are taught to throw, often the instruction is watered down into just a couple of steps. The act of throwing a baseball is not that simple. Throwing
front crawl Published in associa on with swim-teach.com
 front crawl Front Crawl Technique Made Easy Front crawl swimming stroke broken down and explained Including 2 bonus exercises Published in associa on with swim-teach.com Legal No ce Copyright 2008, swim-teach.com
front crawl Front Crawl Technique Made Easy Front crawl swimming stroke broken down and explained Including 2 bonus exercises Published in associa on with swim-teach.com Legal No ce Copyright 2008, swim-teach.com
CHAPTER 9 PROPELLERS
 CHAPTER 9 CHAPTER 9 PROPELLERS CONTENTS PAGE How Lift is Generated 02 Helix Angle 04 Blade Angle of Attack and Helix Angle Changes 06 Variable Blade Angle Mechanism 08 Blade Angles 10 Blade Twist 12 PROPELLERS
CHAPTER 9 CHAPTER 9 PROPELLERS CONTENTS PAGE How Lift is Generated 02 Helix Angle 04 Blade Angle of Attack and Helix Angle Changes 06 Variable Blade Angle Mechanism 08 Blade Angles 10 Blade Twist 12 PROPELLERS
Ranger Walking Initiation Stephanie Schneider 5/15/2012 Final Report for Cornell Ranger Research
 1 Ranger Walking Initiation Stephanie Schneider sns74@cornell.edu 5/15/2012 Final Report for Cornell Ranger Research Abstract I joined the Biorobotics Lab this semester to gain experience with an application
1 Ranger Walking Initiation Stephanie Schneider sns74@cornell.edu 5/15/2012 Final Report for Cornell Ranger Research Abstract I joined the Biorobotics Lab this semester to gain experience with an application
2018/2019 Records of Clarifications from ISU Sports Directorate and SyS TC for Judges, Technical Officials, Coaches and Skaters
 2018/2019 Records of Clarifications from ISU Sports Directorate and SyS TC for Judges, Technical Officials, Coaches and Skaters SYNCHRONIZED SKATING Junior Short Program Synchronized Spin 1. In the Junior
2018/2019 Records of Clarifications from ISU Sports Directorate and SyS TC for Judges, Technical Officials, Coaches and Skaters SYNCHRONIZED SKATING Junior Short Program Synchronized Spin 1. In the Junior
Total out of 9 : Legs perpendicular to the floor Stomach, chest and face touching legs Hands palm up, behind legs (barracuda set- up)
") GENERAL ATHLETIC and SYNCHRO SKILLS COMPETENCIES CHECKLIST / ATHLETE SCORE CARD LEARN TO TRAIN / TRAIN TO TRAIN : - 2 yrs old 26-27 METRONOME SET AT 35 BPM BALANCE: TRIPOD HEADSTAND Head (ears specifically),
GENERAL ATHLETIC and SYNCHRO SKILLS COMPETENCIES CHECKLIST / ATHLETE SCORE CARD LEARN TO TRAIN / TRAIN TO TRAIN : - 2 yrs old 26-27 METRONOME SET AT 35 BPM BALANCE: TRIPOD HEADSTAND Head (ears specifically),
Butterfly Technique Checklist
 1 Butterfly Technique Checklist Marion Alexander, Brad Gerbrandt Sport Biomechanics Laboratory, University of Manitoba Armstroke Entry - Arms enter the water with hands about shoulder width apart and slice
1 Butterfly Technique Checklist Marion Alexander, Brad Gerbrandt Sport Biomechanics Laboratory, University of Manitoba Armstroke Entry - Arms enter the water with hands about shoulder width apart and slice
Direct to your goal.
 Direct to your goal. T R RITTER DRESSAGE Arena Basics And Continuing Exercises 1.0 Preface Welcome to the Arena GPS So, for the first time we presenting a compilation of basic exercises with graphics and
Direct to your goal. T R RITTER DRESSAGE Arena Basics And Continuing Exercises 1.0 Preface Welcome to the Arena GPS So, for the first time we presenting a compilation of basic exercises with graphics and
Sprinting: A Biomechanical Approach By Tom Tellez
 Sprinting: A Biomechanical Approach By Tom Tellez World class male sprinters stride approximately forty-three times for a 100 meter race. If a mechanical error costs one-one thousandth of a second per
Sprinting: A Biomechanical Approach By Tom Tellez World class male sprinters stride approximately forty-three times for a 100 meter race. If a mechanical error costs one-one thousandth of a second per
MODERN GLOSSARY OF TERMS AND TECHNICAL INFORMATION PREPARATORY
 MODERN GLOSSARY OF TERMS AND TECHNICAL INFORMATION PREPARATORY Alternate straight kicks Lying down on the floor, side of body towards front, head in line with body. Hands flat on floor and not touching
MODERN GLOSSARY OF TERMS AND TECHNICAL INFORMATION PREPARATORY Alternate straight kicks Lying down on the floor, side of body towards front, head in line with body. Hands flat on floor and not touching
CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT
 39 CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT 4.1 Modeling in Biomechanics The human body, apart of all its other functions is a mechanical mechanism and a structure,
39 CHAPTER IV FINITE ELEMENT ANALYSIS OF THE KNEE JOINT WITHOUT A MEDICAL IMPLANT 4.1 Modeling in Biomechanics The human body, apart of all its other functions is a mechanical mechanism and a structure,
Modeling Human Movement
 CS 4732: Computer Animation Modeling Human Movement Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Modeling Human Movement: It s Hard!
CS 4732: Computer Animation Modeling Human Movement Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Modeling Human Movement: It s Hard!
AMATEUR HOCKEY ASSOCIATION ILLINOIS, INC. MITE 8 & UNDER AMERICAN DEVELOPMENT MODEL
 Mite 8 & Under American Development Model Week 1 This coach s manual is intended to provide the instructions and tools to conduct the Mite and 8 & Under Illinois Hockey - Skills Challenge. Mite
Mite 8 & Under American Development Model Week 1 This coach s manual is intended to provide the instructions and tools to conduct the Mite and 8 & Under Illinois Hockey - Skills Challenge. Mite
Skier Evaluation Form
 Skier Evaluation Form Instructor Alignment Stance Discipline Reference Alignments Terrain Green Blue Black Off-Piste : Side Slip w/ Stop Wedge Change-Ups Hockey Stop Hops in a Straight Run Side Slips with
Skier Evaluation Form Instructor Alignment Stance Discipline Reference Alignments Terrain Green Blue Black Off-Piste : Side Slip w/ Stop Wedge Change-Ups Hockey Stop Hops in a Straight Run Side Slips with
TRY IT! Athlete s name. Station #0 Warm up/balance. Station #6 Basketball Skills catch, dribble, pass, shoot and rebound
 TRY IT! Athlete s name Station #0 Warm up/balance Station #1 Running Tried it Did it Got it Station #2 Jumping Tried it Did it Got it Station #3 Ball Rolling Tried it Did it Got it Station #4 Throwing
TRY IT! Athlete s name Station #0 Warm up/balance Station #1 Running Tried it Did it Got it Station #2 Jumping Tried it Did it Got it Station #3 Ball Rolling Tried it Did it Got it Station #4 Throwing
REAL LIFE GRAPHS M.K. HOME TUITION. Mathematics Revision Guides Level: GCSE Higher Tier
 Mathematics Revision Guides Real Life Graphs Page 1 of 19 M.K. HOME TUITION Mathematics Revision Guides Level: GCSE Higher Tier REAL LIFE GRAPHS Version: 2.1 Date: 20-10-2015 Mathematics Revision Guides
Mathematics Revision Guides Real Life Graphs Page 1 of 19 M.K. HOME TUITION Mathematics Revision Guides Level: GCSE Higher Tier REAL LIFE GRAPHS Version: 2.1 Date: 20-10-2015 Mathematics Revision Guides
WAVE MOTION. Let's start with an intuition-building exercise that deals with waves in matter, since
 WAVE MOTION Let's start with an intuition-building exercise that deals with waves in matter, since they're easier than light waves to get your hands on. Put your fingertip in the middle of a cup of water
WAVE MOTION Let's start with an intuition-building exercise that deals with waves in matter, since they're easier than light waves to get your hands on. Put your fingertip in the middle of a cup of water
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg. Abstract
 Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
Using GPOPS-II to optimize sum of squared torques of a double pendulum as a prosthesis leg Abstract Milad Zarei MCE 593 Prosthesis Design & Control A two-dimensional, two links pendulum is developed to
ROWING CANADA AVIRON ROWING TECHNIQUE MOVEMENT PATTERNS IN SWEEP AND SCULLING TECHNIQUE IN CANADA FEBRUARY 28, 2017
 ROWING CANADA AVIRON ROWING TECHNIQUE MOVEMENT PATTERNS IN SWEEP AND SCULLING TECHNIQUE IN CANADA FEBRUARY 28, 2017 INTRODUCTION TECHNIQUE CAN BE DEFINED AS A SPECIFIC SEQUENCE OF MOVEMENTS OR PARTS OF
ROWING CANADA AVIRON ROWING TECHNIQUE MOVEMENT PATTERNS IN SWEEP AND SCULLING TECHNIQUE IN CANADA FEBRUARY 28, 2017 INTRODUCTION TECHNIQUE CAN BE DEFINED AS A SPECIFIC SEQUENCE OF MOVEMENTS OR PARTS OF
MANEUVERS REQUIRED IN SHORT PROGRAM
 MANEUVERS REQUIRED IN SHORT PROGRAM REQUIRED AND ADDITIONAL MANEUVERS: Six maneuvers are REQUIRED every year, as listed below. Six ADDITIONAL maneuvers are DRAWN every year. CHANGE OF PACE - A definite
MANEUVERS REQUIRED IN SHORT PROGRAM REQUIRED AND ADDITIONAL MANEUVERS: Six maneuvers are REQUIRED every year, as listed below. Six ADDITIONAL maneuvers are DRAWN every year. CHANGE OF PACE - A definite