Fault Diagnosis based on Particle Filter - with applications to marine crafts
|
|
|
- Ella Christal McDowell
- 6 years ago
- Views:
Transcription






1 1 Fault Diagnosis based on Particle Filter - with applications to marine crafts Bo Zhao CeSOS / Department of Marine Technology Norwegian University of Science and Technology



2 2 Faults Danger and harm Pollution Property loss Safety Environmental friendly Economy Purpose






3 3 DP incident analysis Incident in % Incident trends : Primary causes Average incidents in percentage on primary causes Electrical Operator Environment Generator Other Computer Reference Year Computer Reference Thruster Operator Electrical Generator Environment Other Thruster Data from: The Software Problem ++, Marine Cybernetics, 2004.

4 4 DP incident report: Vessel: Date: Wind: Sea State: Drifted: Two divers on the sea bed, were testing within a subsea structure. 22:10 Bibby Topaz 18/09/12 30 knots, m in 7min A series of alarms activated in the vessels in relation to the DP system. Vessel started drifting away. The Divers started to leave the structure and head back to the diving bell. Diver 2 noticed his umbilical had been snagged. 22:12 Communications and video was lost to Diver 2. The DP operator were trying to control the vessel by manual operation. 22:17 Regained control of the vessel having drifted off approx. 240m. The vessel was driven manually by the master back to the structure. 22:40 22:46 The vessel was back in a position close to the drilling template. Both Divers were on the bell stage. Diver 2 was recovered into the bell.

5 5 Content Principle: System with faults Particle filter Diagnosis of faults Applications: Diagnosis of DP position reference system Underwater robot navigation

6 6 Principle Hidden Markov model State observer Switching-mode HMM Mode/state observer Kalman filter Extended KF Unscented KF Particle filter time projectile rebounds on ground








7 7 Principle Hidden Markov model State observer Switching-mode HMM Mode/state observer Kalman filter Extended KF Unscented KF Particle filter time projectile rebounds on ground
8 8 How do we diagnose a fault? Prediction Predicted Fault free behavior Predicted Faulty behavior


9 9 How do we diagnose a fault? Prediction Predicted Fault free behavior Observation Take the measurement Correction Obs. Predicted Faulty behavior H0 H1 Compare

10 10 Application to Diagnosis of DP position reference system
11 11 Application to Diagnosis of DP position reference system Challenge: Complex external disturbance Wave frequency motion Wind and current force Nonlinear system behavior Model uncertainty Multiple failure modes GPS Drifting Bias Outliers HPR Random excursion Outliers GPS drifting wave
12 12 Application to Diagnosis of DP position reference system Results: Alarm when faults happen HPR in function Diagnosis faults Acceptable positioning during failure Pros: Avoids catastrophic consequences by giving DPO time to handle faults Assists the DPO diagnosing faults GPS drifting wave Cons: Relatively poor position estimation comparing with other DP observer Time consuming


13 13 Application to Robust Navigation of Underwater Robot
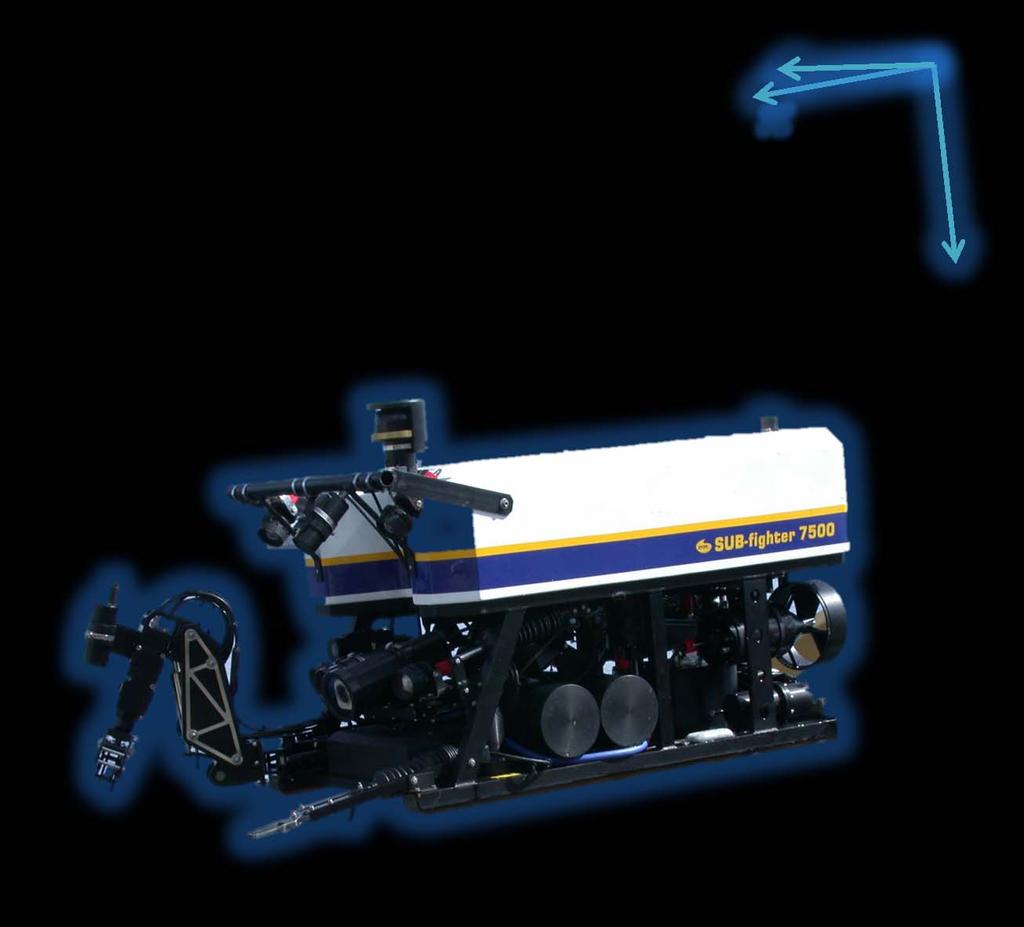


14 14 y x z








15 15 y 2 Vertical thrusters x Vertical: 1.2 knot z 2 Main thrusters Tunnel thruster Yaw rate: 60 /s





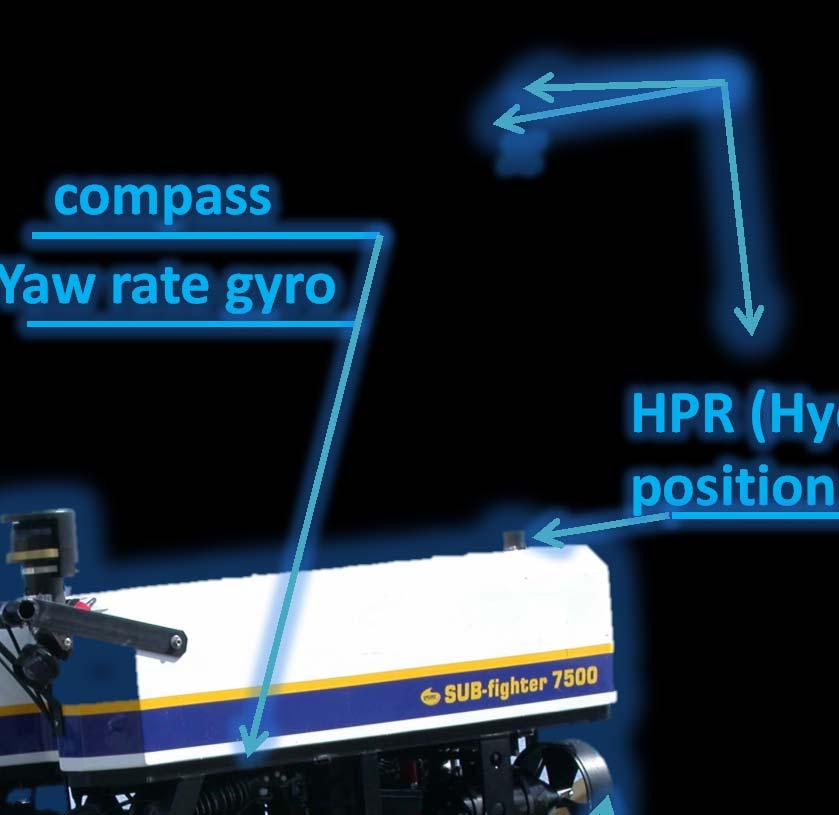


16 16 y compass Yaw rate gyro x z HPR (Hydroacoustic position reference) depth sensor DVL (Dopple Velocity Log)
17 17 Robust Navigation of Underwater Robot ROV Model Kinetics & Kinematics Current Propulsion reduction HPR dropout outliers DVL dropout bias







18 18 HPR Hydro acoustic position reference Faults: 1. Dropout when no signal received 2. Outlier Measurement has significant difference from the true position










19 19 DVL Doppler velocity log Faults: 1. Dropout when no signal received 2. Bias small size constant difference between the measurement and the true velocity

20 20 Robust Navigation of Underwater Robot ROV Model Kinetics & Kinematics Current Propulsion reduction HPR dropout outliers DVL dropout bias


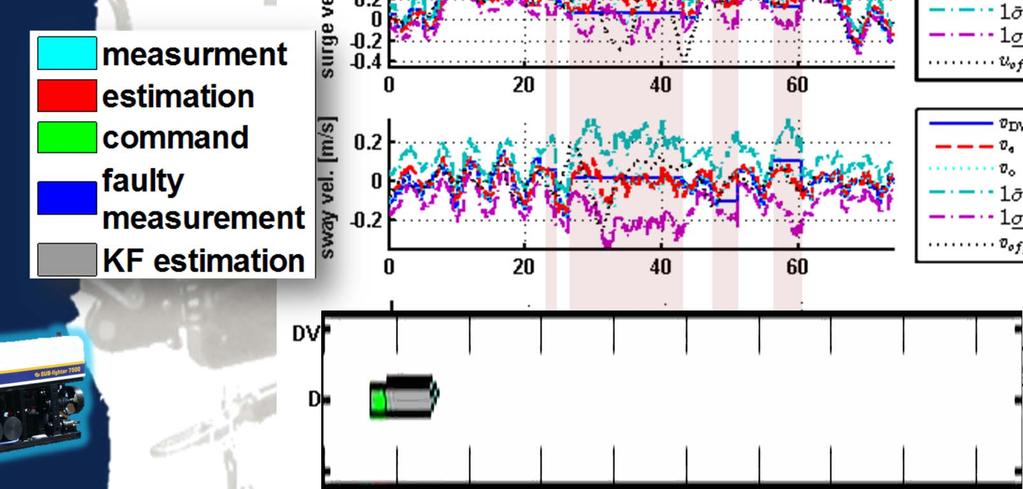
21 21 Robust Navigation of Underwater Robot Information flow Kinetics & Kinematics Current System Model Propulsion reduction Predictions HPR dropout outliers DVL dropout bias Measurement Models Estimation from last sampling time Estimation and Diagnosis




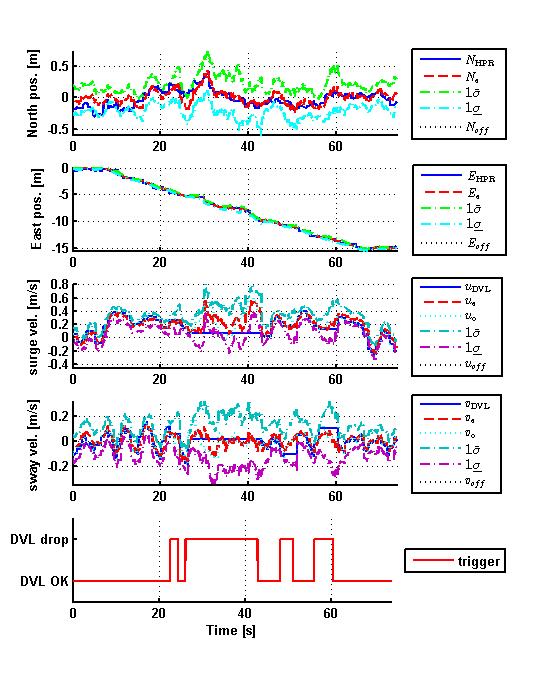
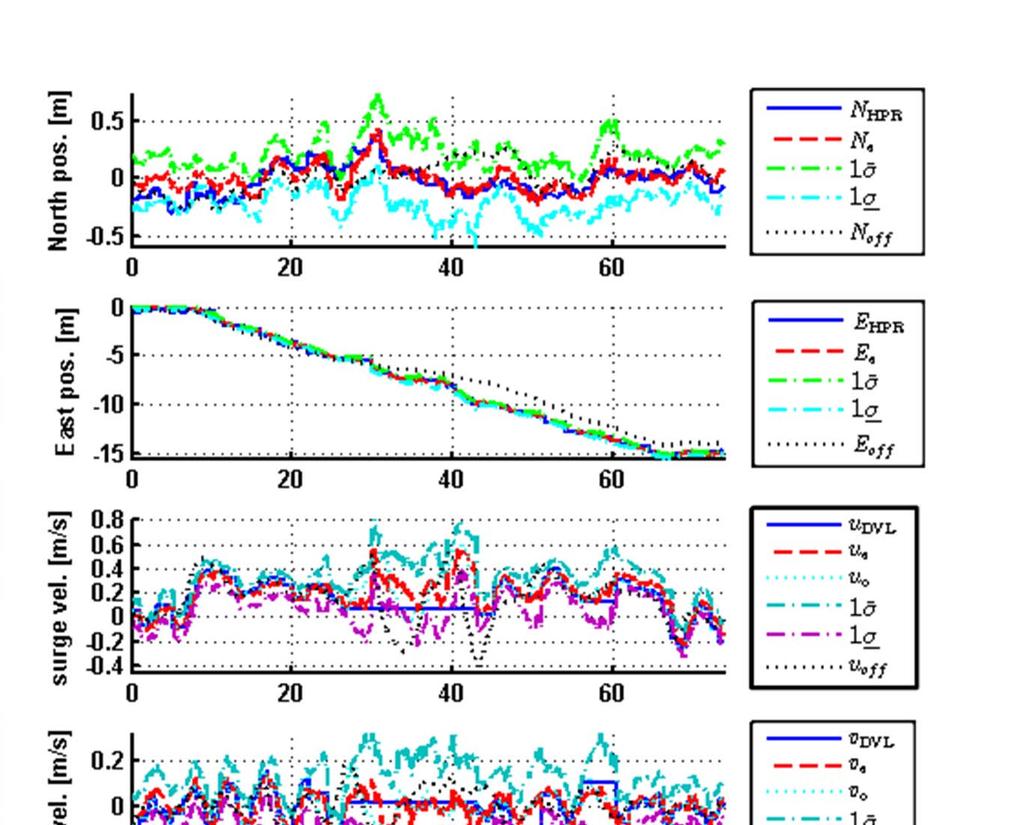
22 22 Robust Navigation of Underwater Robot Experiment Kinetics & Kinematics Current Model Full scale test, ROV Minerva October 17 18, HPR2012, Propulsion Trondheimsfjord. DVL dropout reduction outliers Real disturbance. Real measurement. Prediction dropo In the real time control loop Faults were triggered. ut bias Measurement Estimation from time k 1 Estimation and Diagnosis
23 23 Robust Navigation of Underwater Robot Experiment Kinetics & Kinematics Current Model measurment estimation command faulty Estimation measurement from KF time estimation k 1 2m 2m Full scale test, ROV Minerva October 17 18, HPR2012, Propulsion Trondheimsfjord. DVL dropout reduction outliers Real disturbance. Real measurement. Prediction dropo In the real time control loop Faults were triggered. ut bias Measurement Estimation and Diagnosis 16m 2m

24 24 Robust Navigation of Underwater Robot Experiment Kinetics & Kinematics Current Model Normal measurment estimation command faulty Estimation measurement from KF time estimation k 1 2m 2m Full scale test, ROV Minerva October 17 18, HPR2012, Propulsion Trondheimsfjord. DVL dropout reduction outliers Real disturbance. Real measurement. Prediction dropo In the real time control loop Faults were triggered. ut bias Measurement Estimation and Diagnosis 16m 2m

25 25 Robust Navigation of Underwater Robot Experiment Kinetics & Kinematics Current Model measurment estimation command faulty Estimation measurement from KF time estimation k 1 2m 2m Full scale test, ROV Minerva October 17 18, HPR2012, Propulsion Trondheimsfjord. DVL dropout reduction outliers Real disturbance. Real measurement. HPR Outliers Prediction dropo In the real time control loop Faults were triggered. ut bias Measurement Estimation and Diagnosis 16m 2m

26 26 Robust Navigation of Underwater Robot Experiment Kinetics & Kinematics Current Model measurment estimation command faulty Estimation measurement from KF time estimation k 1 2m 2m Full scale test, ROV Minerva October 17 18, HPR2012, Propulsion Trondheimsfjord. DVL dropout reduction outliers Real disturbance. Real measurement. Prediction dropo In the real time control loop Faults were triggered. ut Measurement HPR drop bias Estimation and Diagnosis 16m 2m



27 27 Experiment Fault Free HPR Outliers HPR Dropout DVL Dropout HPR + DVL DVL Bias Thruster Loss





28 28 Experiment Fault Free HPR Outliers HPR Dropout DVL Dropout HPR + DVL DVL Bias Thruster Loss measurment estimation command faulty measurement KF estimation





29 29 Experiment Fault Free HPR Outliers HPR Dropout DVL Dropout HPR + DVL DVL Bias Thruster Loss measurment estimation command faulty measurement KF estimation


30 30 Principle: Summary System with faults: SM HMM Particle filter for fault diagnosis Applications: Diagnosis of DP position reference system Underwater robot robust navigation Future work: Efficiency issue for particle filter in SM HMM Formal design process for the mode transition Transient after mode switching
31 31 Reference: Particle filter: Zhao, B.; Skjetne, R. & Blanke, M., Particle Filter and for Fault and Diagnosis and Robust Navigation of Underwater Robot, IEEE Transactions on control systems technology (Submitted), IEEE, 2013 Fault diagnosis (regarding marine crafts): Blanke, M.; Kinnaert, M.; Lunze, J. & Staroswiecki, M., Diagnosis and Fault Tolerant Control, Springer Berlin Heidelberg, 2006 Blanke, M., Diagnosis and Fault Tolerant Control for Ship Station Keeping, Intelligent Control, Proceedings of the 2005 IEEE International Symposium on, Mediterrean Conference on Control and Automation, 2005, Others The Software Problem ++, Marine Cybernetics, 2004.
OFFICIAL MESSAGE CIRCULAR
 OFFICIAL MESSAGE CIRCULAR From: NI/ DP Department Number: 010/2012 Date: 20.12.2012 Number of pages: 7 To: Dynamic Positioning Accredited Training Centres Cc: DPTEG members Referent to: Aims and Objectives
OFFICIAL MESSAGE CIRCULAR From: NI/ DP Department Number: 010/2012 Date: 20.12.2012 Number of pages: 7 To: Dynamic Positioning Accredited Training Centres Cc: DPTEG members Referent to: Aims and Objectives
OIL & GAS. MTS DP Committee. Workshop in Singapore Session 4 Day 2. Unwanted Thrust
 OIL & GAS MTS DP Committee Workshop in Singapore 2018 Session 4 Day 2 Unwanted Thrust Unwanted Thrust - Definition Unwanted Thrust Thrust magnitude not what has been ordered by DP (Particularly too high
OIL & GAS MTS DP Committee Workshop in Singapore 2018 Session 4 Day 2 Unwanted Thrust Unwanted Thrust - Definition Unwanted Thrust Thrust magnitude not what has been ordered by DP (Particularly too high
TASK BOOK REPORT FORM
 TASK BOOK REPORT FORM Trainee DPO Details: Name: of birth: CoC Number: NI Logbook No.: Mobile phone: E-mail: Vessel 1 Details: Vessel: DP System: joined: Left: Vessel 2 Details: Vessel: DP System: joined:
TASK BOOK REPORT FORM Trainee DPO Details: Name: of birth: CoC Number: NI Logbook No.: Mobile phone: E-mail: Vessel 1 Details: Vessel: DP System: joined: Left: Vessel 2 Details: Vessel: DP System: joined:
DP Station Keeping Event Bulletin
 DP Station Keeping Event Bulletin IMCA DP Station Keeping Event Bulletin 04/17 October 2017 The following event trees have been compiled from recent reports received by IMCA. The originators granted IMCA
DP Station Keeping Event Bulletin IMCA DP Station Keeping Event Bulletin 04/17 October 2017 The following event trees have been compiled from recent reports received by IMCA. The originators granted IMCA
ALFA Task 2 Deliverable M2.2.1: Underwater Vehicle Station Keeping Results
 ALFA Task Deliverable M..: Underwater Vehicle Station Keeping Results Geoffrey Hollinger Oregon State University Phone: 5-737-59 geoff.hollinger@oregonstate.edu September, Introduction This document presents
ALFA Task Deliverable M..: Underwater Vehicle Station Keeping Results Geoffrey Hollinger Oregon State University Phone: 5-737-59 geoff.hollinger@oregonstate.edu September, Introduction This document presents
STATIONKEEPING DYNAMIC POSITIONING FOR YACHTS. Hans Cozijn
 STATIONKEEPING DYNAMIC POSITIONING FOR YACHTS Hans Cozijn Senior Project Manager Offshore YACHTS VS. OFFSHORE INDUSTRY 2 YACHTS VS. OFFSHORE INDUSTRY Source : www.hdmt21.com Source : www.charterworld.com
STATIONKEEPING DYNAMIC POSITIONING FOR YACHTS Hans Cozijn Senior Project Manager Offshore YACHTS VS. OFFSHORE INDUSTRY 2 YACHTS VS. OFFSHORE INDUSTRY Source : www.hdmt21.com Source : www.charterworld.com
IMCA DP Station Keeping Bulletin 03/18 August 2018
 DP STATION KEEPING BULLETIN IMCA DP Station Keeping Bulletin 03/18 August 2018 The following case studies and observations have been compiled from information received by IMCA during 2018. To ensure anonymity
DP STATION KEEPING BULLETIN IMCA DP Station Keeping Bulletin 03/18 August 2018 The following case studies and observations have been compiled from information received by IMCA during 2018. To ensure anonymity
Nautical Institute Standard for DP Knowledge for Technical Staff
 Nautical Institute Standard for DP Knowledge for Technical Staff 1 st January 2017 Draft 17 th October 2016 1 P a g e Table of Contents Introduction... 3 Course Aims... 3 Minimum Entry Qualification Requirements...
Nautical Institute Standard for DP Knowledge for Technical Staff 1 st January 2017 Draft 17 th October 2016 1 P a g e Table of Contents Introduction... 3 Course Aims... 3 Minimum Entry Qualification Requirements...
Risk Management. Risk Analysis of a Dynamic Positioning Diving Vessel Up Weather of a Platform and Jack Up
 Risk Management Risk Analysis of a Dynamic Positioning Diving Vessel Up Weather of a Platform and Jack Up Doug Phillips American 1 DP Risk Analysis Up Weather DP Dive Vessel 2 Presentation Content The
Risk Management Risk Analysis of a Dynamic Positioning Diving Vessel Up Weather of a Platform and Jack Up Doug Phillips American 1 DP Risk Analysis Up Weather DP Dive Vessel 2 Presentation Content The
A Distributed Control System using CAN bus for an AUV
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A Distributed Control System using CAN bus for an AUV Wenbao Geng a, Yu Huang b, Peng Lu c No. 710 R&D Institute,
OSVDPA CT-1-001, the OSVDPA Competency Standard
 Prepared Date: BoD: YES TAC: YES Page 280 of Appendix 2:, the Section No. Competency or Section Phase Sec. 1 Alarms (DP Control Systems) Phase 1.1 Describe the criteria for setting position, heading, and
Prepared Date: BoD: YES TAC: YES Page 280 of Appendix 2:, the Section No. Competency or Section Phase Sec. 1 Alarms (DP Control Systems) Phase 1.1 Describe the criteria for setting position, heading, and
Survey of fault diagnosis and accommodation of unmanned underwater vehicles
 Survey of fault diagnosis and accommodation of unmanned underwater vehicles Andreas Nioras 1, George C. Karras 2, George K. Fourlas 3 and George Stamoulis 4 1 Department of Computer Science, University
Survey of fault diagnosis and accommodation of unmanned underwater vehicles Andreas Nioras 1, George C. Karras 2, George K. Fourlas 3 and George Stamoulis 4 1 Department of Computer Science, University
IMCA DP Station Keeping Bulletin 04/18 November 2018
 DP STATION KEEPING BULLETIN IMCA DP Station Keeping Bulletin 04/18 November 2018 The following event trees have been compiled from recent reports received by IMCA. The originators granted IMCA permission
DP STATION KEEPING BULLETIN IMCA DP Station Keeping Bulletin 04/18 November 2018 The following event trees have been compiled from recent reports received by IMCA. The originators granted IMCA permission
Advanced Training for DP Operators
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 2008 Training Advanced Training for DP Operators Is it time? What should it look like? How could it be used? Douglas C. Olson Converteam
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 2008 Training Advanced Training for DP Operators Is it time? What should it look like? How could it be used? Douglas C. Olson Converteam
Guidelines on Surveys for Dynamic Positioning System
 Guidelines on Surveys for Dynamic Positioning System (2002) BEIJING 1 CONTENTS Chapter 1 GENERAL 1.1 General requirements 1.2 Class notation 1.3 Definitions 1.4 Plans and documents 1.5 Failure mode and
Guidelines on Surveys for Dynamic Positioning System (2002) BEIJING 1 CONTENTS Chapter 1 GENERAL 1.1 General requirements 1.2 Class notation 1.3 Definitions 1.4 Plans and documents 1.5 Failure mode and
Sparse LBL aided INS for Subsea Positioning
 Sparse LBL aided INS for Subsea Positioning Edward Moller Global Business Manager Construction Survey What is LBL? GPS Network What is LBL? We turn GPS upside down LBL installed in a subsea field development
Sparse LBL aided INS for Subsea Positioning Edward Moller Global Business Manager Construction Survey What is LBL? GPS Network What is LBL? We turn GPS upside down LBL installed in a subsea field development
Guidance on Operational Activity Planning
 AB Guidance on Operational Activity Planning International Marine Contractors Association www.imca-int.com IMCA M 220 November 2012 AB The International Marine Contractors Association (IMCA) is the international
AB Guidance on Operational Activity Planning International Marine Contractors Association www.imca-int.com IMCA M 220 November 2012 AB The International Marine Contractors Association (IMCA) is the international
Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic
 Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic R. Tonnessen* (Petroleum Geo-Services) & T. Skadberg (Petroleum Geo- Services) SUMMARY
Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic R. Tonnessen* (Petroleum Geo-Services) & T. Skadberg (Petroleum Geo- Services) SUMMARY
Marine Technology Society
 Marine Technology Society Dynamic Positioning Conference 21-22 October, 1997 Session 3 Operator Training Dynamic Positioning Familiarization Course By: Greg Navarre Global Marine (Houston) Session Planner
Marine Technology Society Dynamic Positioning Conference 21-22 October, 1997 Session 3 Operator Training Dynamic Positioning Familiarization Course By: Greg Navarre Global Marine (Houston) Session Planner
Marine Technology Society
 Marine Technology Society Dynamic Positioning Conference 21-22 October, 1997 Session 3 Operator Training Induction Course By: Greg Navarre Global Marine (Houston) Session Planner Greg Navarre Global Marine
Marine Technology Society Dynamic Positioning Conference 21-22 October, 1997 Session 3 Operator Training Induction Course By: Greg Navarre Global Marine (Houston) Session Planner Greg Navarre Global Marine
Challenges in estimating the vessel station-keeping performance
 Challenges in estimating the vessel station-keeping performance Luca Pivano, Brede Børhaug and Øyvind Smogeli Marine Cybernetics, Trondheim, Norway E-mail: lp@marinecyb.com One of the challenges in the
Challenges in estimating the vessel station-keeping performance Luca Pivano, Brede Børhaug and Øyvind Smogeli Marine Cybernetics, Trondheim, Norway E-mail: lp@marinecyb.com One of the challenges in the
Return to Session Menu DYNAMIC POSITIONING CONFERENCE QUALITY ASSURANCE SESSION. The Meaning of LIFE. Richard Purser GL Noble Denton
 Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 QUALITY ASSURANCE SESSION The Meaning of LIFE Richard Purser GL Noble Denton The Meaning of Life 15 th October 2013 What is the
Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 QUALITY ASSURANCE SESSION The Meaning of LIFE Richard Purser GL Noble Denton The Meaning of Life 15 th October 2013 What is the
FMEA Proving Trials and Offloading Simulations
 FMEA Proving Trials and Offloading Simulations Lessons Learned Arjen Tjallema Bluewater Energy Services BV Douwe Stapersma Delft University of Technology Agenda p. 2 Introduction FPSO Munin Soliton Currents
FMEA Proving Trials and Offloading Simulations Lessons Learned Arjen Tjallema Bluewater Energy Services BV Douwe Stapersma Delft University of Technology Agenda p. 2 Introduction FPSO Munin Soliton Currents
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Dynamic Positioning Control Augmentation for Jack-up Vessels
 DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
Risk Analysis of a DP Diving Vessel Up Weather Of Platform and Jack Up.
 DYNAMIC POSITIONING CONFERENCE November 15-16, 2005 Risk Management Risk Analysis of a DP Diving Vessel Up Weather Of Platform and Jack Up. Doug Phillips and Jonathan Deegan Global Maritime (Houston) and
DYNAMIC POSITIONING CONFERENCE November 15-16, 2005 Risk Management Risk Analysis of a DP Diving Vessel Up Weather Of Platform and Jack Up. Doug Phillips and Jonathan Deegan Global Maritime (Houston) and
NOBLE REV 02 FPSO MOORING SYSTEM INTEGRITY STUDY
 DENTON INTEGRITY STUDY APPENDIX C INCIDENT REPORTS Incident One FPSO Questionnaire Failure of gripper used to rotate turret Several months after installation This FPSO has an internal partially rotating
DENTON INTEGRITY STUDY APPENDIX C INCIDENT REPORTS Incident One FPSO Questionnaire Failure of gripper used to rotate turret Several months after installation This FPSO has an internal partially rotating
Autosub6000. Results of its Engineering Trials and First Science Missions
 Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Autosub6000 Results of its Engineering Trials and First Science Missions Stephen McPhail, Maaten Furlong, Veerle Huvenne, Peter Stevenson, Miles Pebody, James Perrett NOC, Southampton, UK Objectives of
Planning of Drilling Operations in Extreme Ocean Currents
 DYNAMIC POSITIONING CONFERENCE October 11-12, 2016 OPERATIONS Planning of Drilling Operations in Extreme Ocean Currents Luca Pivano - Marine Cybernetics/DNV GL Kristopher Eide - Marine Cybernetics/DNV
DYNAMIC POSITIONING CONFERENCE October 11-12, 2016 OPERATIONS Planning of Drilling Operations in Extreme Ocean Currents Luca Pivano - Marine Cybernetics/DNV GL Kristopher Eide - Marine Cybernetics/DNV
Safety-critical systems: Basic definitions
 Safety-critical systems: Basic definitions Ákos Horváth Based on István Majzik s slides Dept. of Measurement and Information Systems Budapest University of Technology and Economics Department of Measurement
Safety-critical systems: Basic definitions Ákos Horváth Based on István Majzik s slides Dept. of Measurement and Information Systems Budapest University of Technology and Economics Department of Measurement
Operations and Requirements A Practical Approach to Managing DP Operations
 Operations and Requirements A Practical Approach to Managing DP Operations Suman Muddusetti Shell International Exploration and Production, Inc. Doug Phillips Global Maritime, Inc. October 17-18, 2006
Operations and Requirements A Practical Approach to Managing DP Operations Suman Muddusetti Shell International Exploration and Production, Inc. Doug Phillips Global Maritime, Inc. October 17-18, 2006
Ride-through for Autonomous Vehicles
 Ride-through for Autonomous Vehicles Aaron Kane and Philip Koopman Carnegie Mellon University, Pittsburgh, PA akane@cmu.edu, koopman@cmu.edu Abstract. Safety critical systems often have shutdown mechanisms
Ride-through for Autonomous Vehicles Aaron Kane and Philip Koopman Carnegie Mellon University, Pittsburgh, PA akane@cmu.edu, koopman@cmu.edu Abstract. Safety critical systems often have shutdown mechanisms
ANNEX. to the. Commission Delegated Regulation
 EUROPEAN COMMISSION Brussels, 26.9.2017 C(2017) 6321 final ANNEX 1 PART 10/11 ANNEX to the Commission Delegated Regulation amending Council Regulation (EC) No 428/2009 setting up a Community regime for
EUROPEAN COMMISSION Brussels, 26.9.2017 C(2017) 6321 final ANNEX 1 PART 10/11 ANNEX to the Commission Delegated Regulation amending Council Regulation (EC) No 428/2009 setting up a Community regime for
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
DP Ice Model Test of Arctic Drillship
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 211 ICE TESTING SESSION DP Ice Model Test of Arctic Drillship Torbjørn Hals Kongsberg Maritime, Kongsberg, Norway Fredrik
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 211 ICE TESTING SESSION DP Ice Model Test of Arctic Drillship Torbjørn Hals Kongsberg Maritime, Kongsberg, Norway Fredrik
DYNAMIC POSITIONING CONFERENCE. October 13-14, Arctic. DP In Ice Conditions
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 29 Arctic DP In Ice Conditions Nils Albert Jenssen Kongsberg Maritime, Kongsberg Norway Suman Muddesitti Shell International Exploration
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 29 Arctic DP In Ice Conditions Nils Albert Jenssen Kongsberg Maritime, Kongsberg Norway Suman Muddesitti Shell International Exploration
Full Scale Measurements Sea trials
 Full Scale Measurements Sea trials 1 Experimental Methods in Marine Hydrodynamics Lecture in week 45 Contents: Types of tests How to perform and correct speed trials Wave monitoring Measurement Observations
Full Scale Measurements Sea trials 1 Experimental Methods in Marine Hydrodynamics Lecture in week 45 Contents: Types of tests How to perform and correct speed trials Wave monitoring Measurement Observations
FPSO and Shuttle Tanker Positioning
 Gabriel Delgado-Saldivar The Use of DP-Assisted FPSOs for Offshore Well Testing Services DYNAMIC POSITIONING CONFERENCE October 17-18, 2006 Operations and Requirements Chris Jenman Global Maritime, Inc.
Gabriel Delgado-Saldivar The Use of DP-Assisted FPSOs for Offshore Well Testing Services DYNAMIC POSITIONING CONFERENCE October 17-18, 2006 Operations and Requirements Chris Jenman Global Maritime, Inc.
DYNAMIC POSITIONING CONFERENCE October 7-8, New Applications. Dynamic Positioning for Heavy Lift Applications
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 2008 New Applications Dynamic Positioning for Heavy Lift Applications John Flint and Richard Stephens Converteam UK Ltd. (Rugby,
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 7-8, 2008 New Applications Dynamic Positioning for Heavy Lift Applications John Flint and Richard Stephens Converteam UK Ltd. (Rugby,
BIBBY POLARIS MULTI PURPOSE DIVE SUPPORT & OFFSHORE CONSTRUCTION VESSEL
 BIBBY POLARIS MULTI PURPOSE DIVE SUPPORT & OFFSHORE CONSTRUCTION VESSEL Saturation & Air Diving Support Structure Installation Flexible, Flowline & Umbilical Installation Inspection, Repair & Maintenance
BIBBY POLARIS MULTI PURPOSE DIVE SUPPORT & OFFSHORE CONSTRUCTION VESSEL Saturation & Air Diving Support Structure Installation Flexible, Flowline & Umbilical Installation Inspection, Repair & Maintenance
The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface in Waves
 Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface
Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 The Performance of Vertical Tunnel Thrusters on an Autonomous Underwater Vehicle Operating Near the Free Surface
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 500M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
BIBBY POLARIS MULTI PURPOSE DIVE SUPPORT & OFFSHORE CONSTRUCTION VESSEL
 BIBBY POLARIS MULTI PURPOSE DIVE SUPPORT & OFFSHORE CONSTRUCTION VESSEL Saturation & Air Diving Support Structure Installation Flexible, Flowline & Umbilical Installation Inspection, Repair & Maintenance
BIBBY POLARIS MULTI PURPOSE DIVE SUPPORT & OFFSHORE CONSTRUCTION VESSEL Saturation & Air Diving Support Structure Installation Flexible, Flowline & Umbilical Installation Inspection, Repair & Maintenance
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES
 ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
ZIPWAKE DYNAMIC TRIM CONTROL SYSTEM OUTLINE OF OPERATING PRINCIPLES BEHIND THE AUTOMATIC MOTION CONTROL FEATURES TABLE OF CONTENTS 1 INTRODUCTION 3 2 SYSTEM COMPONENTS 3 3 PITCH AND ROLL ANGLES 4 4 AUTOMATIC
IMCA Competence Assessment Portfolio June 2013
 IMCA Competence Portfolio June 2013 Name: Start Date in Current Self- Checklist Entry Level Criteria Acceptance Criteria Attained Certification 500 GRT or more: Valid certificate of competency or certificate
IMCA Competence Portfolio June 2013 Name: Start Date in Current Self- Checklist Entry Level Criteria Acceptance Criteria Attained Certification 500 GRT or more: Valid certificate of competency or certificate
The vessel is fully compliant with the latest Special Purpose Ship Code, meets DNV class requirements and holds DP2 notation.
 Marine Engineering Diving Services Altus lnvictus Altus Invictus is a multipurpose vessel with inbuilt air diving capability. Built in Batam in 2011, Invictus has a maximum draft of just 5 meters, 65.5
Marine Engineering Diving Services Altus lnvictus Altus Invictus is a multipurpose vessel with inbuilt air diving capability. Built in Batam in 2011, Invictus has a maximum draft of just 5 meters, 65.5
Modal Analysis of Propulsion Shafting of a 48,000 tons Bulk Carrier
 Modal Analysis of Propulsion Shafting of a 48,000 tons Bulk Carrier Zixin Wang a Dalian Scientific Test and Control Technology Institute. 16 Binhai Street. Dalian, 116013, China. Abstract a wangzixin_1@163.com
Modal Analysis of Propulsion Shafting of a 48,000 tons Bulk Carrier Zixin Wang a Dalian Scientific Test and Control Technology Institute. 16 Binhai Street. Dalian, 116013, China. Abstract a wangzixin_1@163.com
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Partially Observable MDP Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
CS 4649/7649 Robot Intelligence: Planning Partially Observable MDP Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu)
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M
 C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
C-RESEARCHER SERIES THE ELITE IN EXPLORATION 2 3 OCCUPANTS 480M 3000M Challenging Limits The C-Researcher series offers scientists, researchers, documentary makers and explorers the most outstanding submersibles
Definition of a Dive Leader. Experience dives
 Definition of a Dive Leader A Dive Leader is defined as a diver who: Can plan and lead a range of dives including those requiring detailed dive, air and decompression requirements planning. Has the skill
Definition of a Dive Leader A Dive Leader is defined as a diver who: Can plan and lead a range of dives including those requiring detailed dive, air and decompression requirements planning. Has the skill
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004
 Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Sontek RiverSurveyor Test Plan Prepared by David S. Mueller, OSW February 20, 2004 INTRODUCTION Sontek/YSI has introduced new firmware and software for their RiverSurveyor product line. Firmware changes
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system
 1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
1 Dynamically stepping over large obstacle utilizing PSO optimization in the B4LC system QI LIU, JIE ZHAO, KARSTEN BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, 67655, Germany
Safety of DP Drilling Operations in the South China Sea
 Scandpower Risk Management China Inc Rm. 707 Towercrest International Plaza No. 3 Maizidian West Road Chaoyang District, 100016 Beijing, P.R. China Safety of DP Drilling Operations in the South China Sea
Scandpower Risk Management China Inc Rm. 707 Towercrest International Plaza No. 3 Maizidian West Road Chaoyang District, 100016 Beijing, P.R. China Safety of DP Drilling Operations in the South China Sea
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
FMEA Proving Trials and Offloading Simulations - Lessons Learned -
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 12-13, 2010 SENSORS II SESSION FMEA Proving Trials and Offloading Simulations - Lessons Learned - Arjen Tjallema Bluewater
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 12-13, 2010 SENSORS II SESSION FMEA Proving Trials and Offloading Simulations - Lessons Learned - Arjen Tjallema Bluewater
Author s Name Name of the Paper Session. Positioning Committee. Marine Technology Society. DYNAMIC POSITIONING CONFERENCE September 18-19, 2001
 Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 18-19, 2001 POWER PLANT SESSION A New Concept for Fuel Tight DP
Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 18-19, 2001 POWER PLANT SESSION A New Concept for Fuel Tight DP
NETROV PROJECT: UNDERWATER REMOTE CONTROLLED MINIVEHICLE. Grigore Antipa Constantza
 NETROV PROJECT: UNDERWATER REMOTE CONTROLLED MINIVEHICLE O. ROBU 1, Elena POPESCU 1, Anca CONSTANTIN 1, D. POPA 2, V. COSTENCU 3, M. PREDESCU 4, 1 Ovidius University Constantza 2 Maritime University Constantza
NETROV PROJECT: UNDERWATER REMOTE CONTROLLED MINIVEHICLE O. ROBU 1, Elena POPESCU 1, Anca CONSTANTIN 1, D. POPA 2, V. COSTENCU 3, M. PREDESCU 4, 1 Ovidius University Constantza 2 Maritime University Constantza
Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL.
 Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL www.humphree.com WHEN EFFICIENCY AND PERFORMANCE REALLY MATTERS! Humphree proudly presents the new HCS-5 The HCS-5 combines exceptional mechanical
Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL www.humphree.com WHEN EFFICIENCY AND PERFORMANCE REALLY MATTERS! Humphree proudly presents the new HCS-5 The HCS-5 combines exceptional mechanical
Managing Dynamic Positioning (DP) Operations
 Operations") Managing Dynamic Positioning (DP) Operations Captain Andy Goldsmith, IMCA Technical Adviser IOSH Offshore Conference Tools for the trade 19 October 2017 1 2 IMCA OPERATIONAL STRUCTURE BOARD CEO SECRETARIAT
Managing Dynamic Positioning (DP) Operations Captain Andy Goldsmith, IMCA Technical Adviser IOSH Offshore Conference Tools for the trade 19 October 2017 1 2 IMCA OPERATIONAL STRUCTURE BOARD CEO SECRETARIAT
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
Wind Turbine Shuttle. Ferdinand van Heerd
 Wind Turbine Shuttle Ferdinand van Heerd Contents Introduction Concept Resistance Seakeeping Vessel motion compensation system Hoisting motion compensation system Landing the wind turbine Workability Efficiency
Wind Turbine Shuttle Ferdinand van Heerd Contents Introduction Concept Resistance Seakeeping Vessel motion compensation system Hoisting motion compensation system Landing the wind turbine Workability Efficiency
SUPER YACHT SUB SERIES
 SUPER YACHT SUB SERIES THE ULTIMATE LUXURY SUBMERSIBLE 3 OCCUPANTS 100M 500M The Ultimate in Superyacht Luxury Compact and luxurious private submarines especially designed to fit aboard superyachts, the
SUPER YACHT SUB SERIES THE ULTIMATE LUXURY SUBMERSIBLE 3 OCCUPANTS 100M 500M The Ultimate in Superyacht Luxury Compact and luxurious private submarines especially designed to fit aboard superyachts, the
Exceptional Experience
 Exceptional Experience commercial pool cleaners Enjoy the Dolphin Advantage Only Dolphin robotic pool cleaners by Maytronics deliver a complete, exceptional pool experience. Bringing together 30 years
Exceptional Experience commercial pool cleaners Enjoy the Dolphin Advantage Only Dolphin robotic pool cleaners by Maytronics deliver a complete, exceptional pool experience. Bringing together 30 years
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane
 Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Planning of drilling operations in extreme ocean currents: experience from time-domain simulations and full-scale validation on Maersk Venturer
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 216 OPERATIONS SESSION Planning of drilling operations in : experience from time-domain simulations and full-scale
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 11-12, 216 OPERATIONS SESSION Planning of drilling operations in : experience from time-domain simulations and full-scale
Planning and Acting in Partially Observable Stochastic Domains
 Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Planning and Acting in Partially Observable Stochastic Domains Leslie Pack Kaelbling and Michael L. Littman and Anthony R. Cassandra (1998). Planning and Acting in Partially Observable Stochastic Domains,
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs
 Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Note that this arming distance is not affected by the speed setting of your torpedoes.
 Torpedoes From SilentHunterIII Community Manual Range The minimum (arming) range for the torpedoes in SH3 is officially stated as 300m. However, some [subsim.com (http://www.subsim.com)] forum members
Torpedoes From SilentHunterIII Community Manual Range The minimum (arming) range for the torpedoes in SH3 is officially stated as 300m. However, some [subsim.com (http://www.subsim.com)] forum members
NUI Overview. Mike Jakuba Woods Hole Oceanographic Institution
 NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
NUI Overview Mike Jakuba Woods Hole Oceanographic Institution Optics Co-Registered Multibeam Fluorometry C. Katlein (AWI) Katlein et. Al, 2015, JGR Still-Camera S. Laney (WHOI) H.Singh (WHOI) 2.5m NUI
Failure Detection in an Autonomous Underwater Vehicle
 Failure Detection in an Autonomous Underwater Vehicle Alec Orrick, Make McDermott, Department of Mechanical Engineering David M. Barnett, Eric L. Nelson, Glen N. Williams, Department of Computer Science
Failure Detection in an Autonomous Underwater Vehicle Alec Orrick, Make McDermott, Department of Mechanical Engineering David M. Barnett, Eric L. Nelson, Glen N. Williams, Department of Computer Science
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico.
 Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Marine Towed Array Surveys of Ostrich Bay, Lake Erie and Puerto Rico. Chet Bassani, Nagi Khadr, Chris Gibson and Jim McDonald Advanced Sensors and Analysis Div., SAIC Cary, NC Marine Towed Array (MTA)
Full scale VIV response measurements of a drill pipe in Gulf of Mexico loop currents (OMAE )
") Full scale VIV response measurements of a drill pipe in Gulf of Mexico loop currents (OMAE2008-57610) Beynet, Shilling, Campbell, Tellier, Howells Estoril Portugal - June 2008 The Test September 2004 Test
Full scale VIV response measurements of a drill pipe in Gulf of Mexico loop currents (OMAE2008-57610) Beynet, Shilling, Campbell, Tellier, Howells Estoril Portugal - June 2008 The Test September 2004 Test
Automatic Heading Control for Dynamic Positioning in Ice
 Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 DESIGN AND CONTROL SESSION II Automatic Heading Control for Dynamic Positioning in Ice Sofien Kerkeni SIREHNA Ivan Metrikin Norwegian
Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 DESIGN AND CONTROL SESSION II Automatic Heading Control for Dynamic Positioning in Ice Sofien Kerkeni SIREHNA Ivan Metrikin Norwegian
Review of drowning case from Crystal Lake and the discovery of the victim 9 years after the drowning
 Review of drowning case from Crystal Lake and the discovery of the victim 9 years after the drowning g 1 Crystal Lake is a freshwater lake in Northwestern Michigan s Benzie county It is spring fed and
Review of drowning case from Crystal Lake and the discovery of the victim 9 years after the drowning g 1 Crystal Lake is a freshwater lake in Northwestern Michigan s Benzie county It is spring fed and
Operability Study for DP Vessel Operations at a Deep water Spar-A Decision Support Tool
 Operability Study for DP Vessel Operations at a Deep water Spar-A Decision Support Tool Xiaobing Shi, American Global Maritime Torbjørn Hals, Kongsberg Maritime AS Suman Muddusetti, Shell Oct. 11, 2011
Operability Study for DP Vessel Operations at a Deep water Spar-A Decision Support Tool Xiaobing Shi, American Global Maritime Torbjørn Hals, Kongsberg Maritime AS Suman Muddusetti, Shell Oct. 11, 2011
ITTC Recommended Procedures and Guidelines
 Page 1 of 6 Table of Contents 1. PURPOSE...2 2. PARAMETERS...2 2.1 General Considerations...2 3 DESCRIPTION OF PROCEDURE...2 3.1 Model Design and Construction...2 3.2 Measurements...3 3.5 Execution of
Page 1 of 6 Table of Contents 1. PURPOSE...2 2. PARAMETERS...2 2.1 General Considerations...2 3 DESCRIPTION OF PROCEDURE...2 3.1 Model Design and Construction...2 3.2 Measurements...3 3.5 Execution of
Fail Operational Controls for an Independent Metering Valve
 Group 14 - System Intergration and Safety Paper 14-3 465 Fail Operational Controls for an Independent Metering Valve Michael Rannow Eaton Corporation, 7945 Wallace Rd., Eden Prairie, MN, 55347, email:
Group 14 - System Intergration and Safety Paper 14-3 465 Fail Operational Controls for an Independent Metering Valve Michael Rannow Eaton Corporation, 7945 Wallace Rd., Eden Prairie, MN, 55347, email:
A New Real-time Method for Sailboat Performance estimation based on Leeway Modeling
 THE 21 ST CHESAPEAKE SAILING YACHT SYMPOSIUM ANNAPOLIS, MARYLAND, MARCH 2013 A New Real-time Method for Sailboat Performance estimation based on Leeway Modeling Ronan Douguet, Lab-STICC, Université de
THE 21 ST CHESAPEAKE SAILING YACHT SYMPOSIUM ANNAPOLIS, MARYLAND, MARCH 2013 A New Real-time Method for Sailboat Performance estimation based on Leeway Modeling Ronan Douguet, Lab-STICC, Université de
Vision Based Autonomous Underwater Vehicle for Pipeline Tracking
 Vision Based Autonomous Underwater Vehicle for Pipeline Tracking Manikandan. G 1, Sridevi. S 2, Dhanasekar. J 3 Assistant Professor, Department of Mechatronics Engineering, Bharath University, Chennai,
Vision Based Autonomous Underwater Vehicle for Pipeline Tracking Manikandan. G 1, Sridevi. S 2, Dhanasekar. J 3 Assistant Professor, Department of Mechatronics Engineering, Bharath University, Chennai,
Dynamic Positioning: Method for Disaster Prevention and Risk Management
 Available online at www.sciencedirect.com ScienceDirect Procedia Earth and Planetary Science 11 ( 2015 ) 216 223 Global Challenges, Policy Framework & Sustainable Development for Mining of Mineral and
Available online at www.sciencedirect.com ScienceDirect Procedia Earth and Planetary Science 11 ( 2015 ) 216 223 Global Challenges, Policy Framework & Sustainable Development for Mining of Mineral and
A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING
 A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING By Marian Copilet, Durham Pipeline Technology Ltd., Gateshead, UK & Prof. Ernie Appleton, University of Durham 1. ABSTRACT This paper discusses
A NEW APPROACH TO BUCKLING DETECTION IN OFFSHORE PIPELINE LAYING By Marian Copilet, Durham Pipeline Technology Ltd., Gateshead, UK & Prof. Ernie Appleton, University of Durham 1. ABSTRACT This paper discusses
A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV
 A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV Robert Damus, Samuel Desset, James Morash, Victor Polidoro Autonomous Underwater Vehicles Lab, Massachusetts Institute of Technology,
A NEW PARADIGM FOR SHIP HULL INSPECTION USING A HOLONOMIC HOVER-CAPABLE AUV Robert Damus, Samuel Desset, James Morash, Victor Polidoro Autonomous Underwater Vehicles Lab, Massachusetts Institute of Technology,
DYNAMIC POSITIONING SYSTEMS
 Guide for Dynamic Positioning Systems GUIDE FOR DYNAMIC POSITIONING SYSTEMS NOVEMBER 2013 (Updated July 2014 see next page) American Bureau of Shipping Incorporated by Act of Legislature of the State of
Guide for Dynamic Positioning Systems GUIDE FOR DYNAMIC POSITIONING SYSTEMS NOVEMBER 2013 (Updated July 2014 see next page) American Bureau of Shipping Incorporated by Act of Legislature of the State of
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
IMCA Competence Assessment Portfolio June 2013
 IMCA Competence Portfolio June 2013 Name: Start Date in Current Self- Checklist Entry Level Criteria Acceptance Criteria Attained Certification 500 GRT or more: Valid certificate of competency or certificate
IMCA Competence Portfolio June 2013 Name: Start Date in Current Self- Checklist Entry Level Criteria Acceptance Criteria Attained Certification 500 GRT or more: Valid certificate of competency or certificate
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV SYSTEM
 TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
DYNAMIC POSITIONING CONFERENCE. October 13-14, New Applications. Small-Scale DP Systems
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 New Applications Small-Scale DP Systems Dr. John Leavitt L-3 Dynamic Positioning & Control Systems Abstract As DP hardware
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 New Applications Small-Scale DP Systems Dr. John Leavitt L-3 Dynamic Positioning & Control Systems Abstract As DP hardware
COURSE OBJECTIVES CHAPTER 9
 COURSE OBJECTIVES CHAPTER 9 9. SHIP MANEUVERABILITY 1. Be qualitatively familiar with the 3 broad requirements for ship maneuverability: a. Controls fixed straightline stability b. Response c. Slow speed
COURSE OBJECTIVES CHAPTER 9 9. SHIP MANEUVERABILITY 1. Be qualitatively familiar with the 3 broad requirements for ship maneuverability: a. Controls fixed straightline stability b. Response c. Slow speed
Flutter Testing. Wind Tunnel Testing (excerpts from Reference 1)
") Flutter Testing In the early years of aviation, no formal flutter testing of aircraft was performed. Flutter was usually discovered by accident during flight of the aircraft. The pilot flew the aircraft
Flutter Testing In the early years of aviation, no formal flutter testing of aircraft was performed. Flutter was usually discovered by accident during flight of the aircraft. The pilot flew the aircraft
Fail operational controls for an independent metering valve
 Failure mode and CMA valves Fail operational controls for an independent metering valve By: Michael Rannow email: michaelrannow@eaton.com Eaton Corporation, 7945 Wallace Rd. Eden Prairie, MN, 55347 As
Failure mode and CMA valves Fail operational controls for an independent metering valve By: Michael Rannow email: michaelrannow@eaton.com Eaton Corporation, 7945 Wallace Rd. Eden Prairie, MN, 55347 As
Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President
 Orientation By: Nick Lowell, Founder & President") Lowell Instruments Application Note #TCMA Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President 1 Introduction The TCM-1 Tilt Current Meter (TCM)
Lowell Instruments Application Note #TCMA Deploying the TCM-1 Tilt Current Meter in an Inverted (Hanging) Orientation By: Nick Lowell, Founder & President 1 Introduction The TCM-1 Tilt Current Meter (TCM)
ADCI Consensus Standards - GAP Analysis Rev. 6 and 6.1 April 2, 2014
 ADCI CS Rev. 6 (2011) ADCI CS Rev. 6.1 (2014) Section 1.0 General Provisions IMPLEMENTATION OF CERTIFICATION AND EQUIPMENT REQUIREMENTS Superscripts 1- Compliance within 6 mos. 2- Compliance within 12
ADCI CS Rev. 6 (2011) ADCI CS Rev. 6.1 (2014) Section 1.0 General Provisions IMPLEMENTATION OF CERTIFICATION AND EQUIPMENT REQUIREMENTS Superscripts 1- Compliance within 6 mos. 2- Compliance within 12
Advanced Applications in Naval Architecture Beyond the Prescriptions in Class Society Rules
 Advanced Applications in Naval Architecture Beyond the Prescriptions in Class Society Rules CAE Naval 2013, 13/06/2013 Sergio Mello Norman Neumann Advanced Applications in Naval Architecture Introduction
Advanced Applications in Naval Architecture Beyond the Prescriptions in Class Society Rules CAE Naval 2013, 13/06/2013 Sergio Mello Norman Neumann Advanced Applications in Naval Architecture Introduction
Modelling Today for the Future. Advanced Modelling Control Techniques
 CwMAG 1 st Autumn Conference 2012 Modelling Today for the Future Advanced Modelling Control Techniques What are advanced modelling controls? Why do we have them? How can we use them? What are the differences
CwMAG 1 st Autumn Conference 2012 Modelling Today for the Future Advanced Modelling Control Techniques What are advanced modelling controls? Why do we have them? How can we use them? What are the differences
EVALUATING CRITERIA FOR DP VESSELS
 Journal of KONES Powertrain and Transport, Vol. 20, No. 2013 EVALUATING CRITERIA FOR DP VESSELS Jerzy Herdzik Gdynia Maritime University, Marine Power Plant Department Morska Street 81-87, 81-225 Gdynia,
Journal of KONES Powertrain and Transport, Vol. 20, No. 2013 EVALUATING CRITERIA FOR DP VESSELS Jerzy Herdzik Gdynia Maritime University, Marine Power Plant Department Morska Street 81-87, 81-225 Gdynia,
Document Title : Air Diving Procedures Manual. Asia Divers Limited. Air Diving Procedures Manual DIV-MA Copyright
 Asia Divers Limited Document Title : Air Diving Procedures Manual Doc. No : DIV-MA-0002 Page : 1 of 43 Rev : 0 Date : 06 th July 2001 Asia Divers Limited Air Diving Procedures Manual DIV-MA-0002 Copyright
Asia Divers Limited Document Title : Air Diving Procedures Manual Doc. No : DIV-MA-0002 Page : 1 of 43 Rev : 0 Date : 06 th July 2001 Asia Divers Limited Air Diving Procedures Manual DIV-MA-0002 Copyright
Isis Deployment. TMS and Live Boating. Inmartech08. Dave Turner Operations Co-ordinator.
 Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Isis Deployment TMS and Live Boating Inmartech08 Dave Turner Operations Co-ordinator TMS Operations Why Why do do we we have have aa TMS? TMS? ItIt was was deemed deemed an an essential essential part
Manned Underwater Operations (MUO) in a holistic safety perspective. Olav Hauso. Special Adviser. Petroleum Safety Authority, Norway (PSA)
 in a holistic safety perspective. Olav Hauso. Special Adviser. Petroleum Safety Authority, Norway (PSA)") Olav Hauso Special Adviser Petroleum Safety Authority, Norway (PSA) Holism (from Greek: "all, whole, entire"): Is the idea that systems and their properties should be viewed as a whole, not as a collection
Olav Hauso Special Adviser Petroleum Safety Authority, Norway (PSA) Holism (from Greek: "all, whole, entire"): Is the idea that systems and their properties should be viewed as a whole, not as a collection