Onboard Report. off Tohoku (NT13-21LEG1)
|
|
|
- Thomas Floyd
- 5 years ago
- Views:
Transcription



1 Onboard Report of the ROV Hyper-Dolphin 3000 Cruise off Tohoku (NT13-21LEG1) October 6 19, 2013 Japan Agency for Marine-Earth Science and Technology (JAMSTEC)
2 Cruise ID: NT13-21LEG1 Name of vessel: R/V Natsushima Chief scientist: Yoshihiro FUJIWARA (JAMSTEC) Representative of the Science Party: Yoshihiro FUJIWARA (JAMSTEC) Title of proposal: Research on Factors Controlling Open Ocean Benthopelagic Ecosystem Dynamics Cruise period: October 6-19, 2013 Ports of call: Shiogama Port on October 6, 2013 Shiogama Port on October 19, 2013 Research area: Off Sanriku
3 Abstract The ROV Hyper-Dolphin dives (dive # ) were conducted off Tohoku from October 6 to 19, 2013 for understanding of influences of the 2011 Tohoku earthquake on the deep-sea ecosystem as a part of the project Tohoku Ecosystem-Associated Marine Sciences (TEAMS). The total numbers of marine tsunami debris were much smaller on flat seafloors than in submarine canyons and the numbers were relatively small deeper than 1,000 m. Fishery resources including Sebastolobus macrochir, Gadus macrocephalus and Chionoecetes opilio were widely distributed in our research areas. Three-dimensional mapping of marine tsunami debris was conducted and the biomass around the debris was measured. Three bio-tracking stations and 10 specimens of snow crabs were deployed on seafloor at a depth of 430 m. A deep-sea lander, which was deployed at a depth of 998 m on August 14, 2012, was safely recovered.
4 NT13-21 LEG1 onboard report Contents Abstract (Fujiwara) 1. Dive survey results 1-1. Dive list (Orui) 1-2. Preliminary results (each researcher in charge) Payload list with photographs (Nishida) 2. 3D mapping survey (Nishida, Unni) 3. Long-term measurement (Furushima) 4. Geophysical survey results (Toizumi) 5. Scientific results (Fujiwara) 6. Proposals for the future studies (each researcher)

5 1. Dive survey results 1-1. Dive and event list
6 1-2. Preliminary results Dive number: HD#1579 Date: October 7, 2013 Site: Funakoshi submarine canyon, off Ohtsuchi Chief observer: Yoshihiro FUJIWARA (JAMSTEC) Main purposes: Observation and sampling of marine tsunami debris and its associated fauna Payload equipment: 1. seaxerocks 1 2. Suction sampler & multiple canisters 1 3. Sampling box 2 4. MBARI corer 3 5. Marker 3 Dive summary A little marine tsunami debris was observed. Benthic organisms were sparse and artificial trails, probably due to fishing activities, were observed. The 3D mapping system seaxerocks worked well at an altitude of 4 meters. No biological and sediment sampling were conducted.
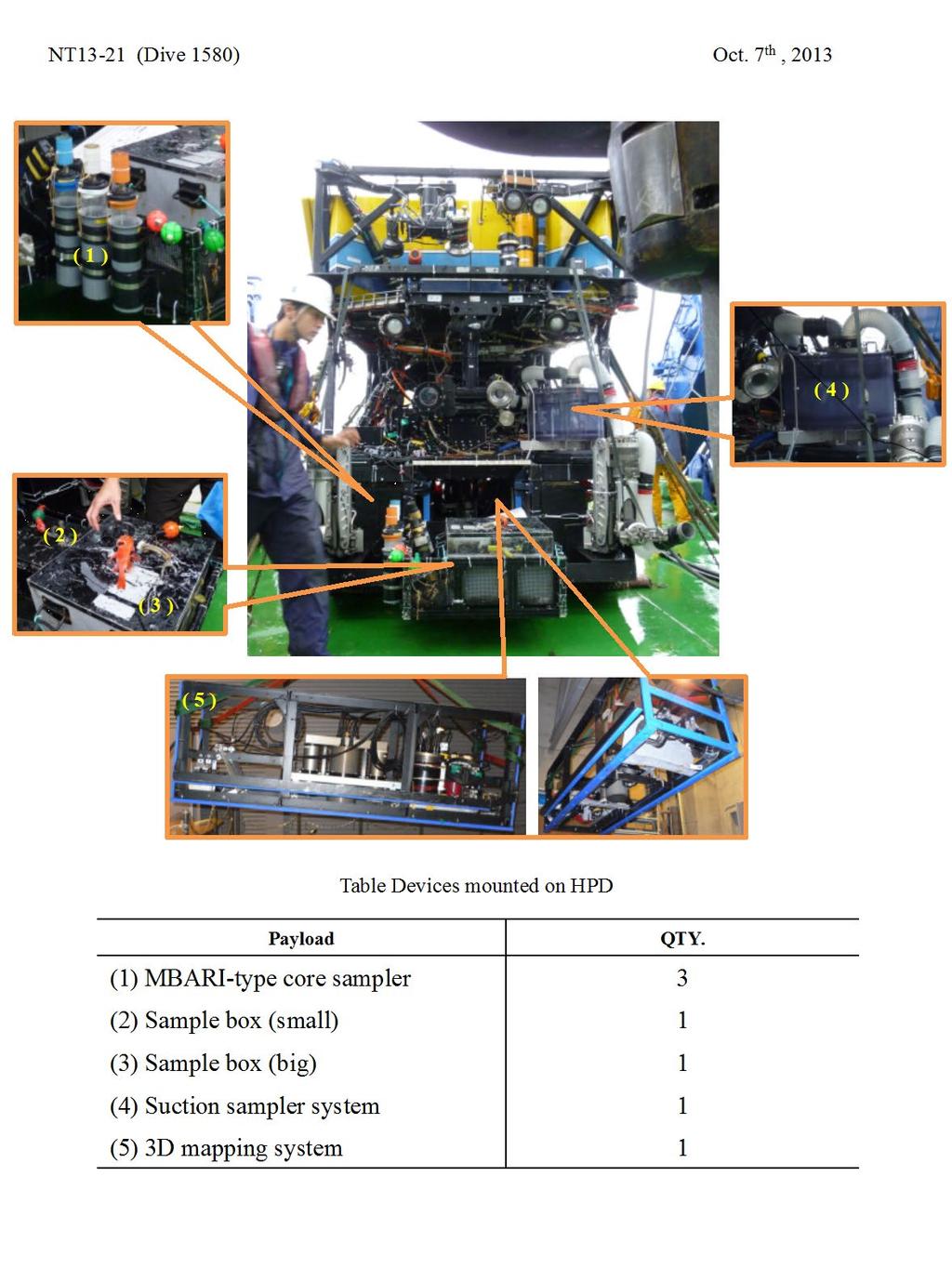
7 1-2. Preliminary results Dive number: HD#1580 Date: October 7, 2013 Site: Funakoshi submarine canyon, off Ohtsuchi Chief observer: Yoshihiro FUJIWARA (JAMSTEC) Main purposes: 3D mapping around marine tsunami debris and sampling of the debris and its associated fauna Payload equipment: 1. seaxerocks 1 2. Suction sampler & multiple canisters 1 3. Sampling box 2 4. MBARI corer 3 5. Marker 3 Dive summary Several patches of marine tsunami debris were observed, which were composed of wood, clothes, rugs, ropes, cans, and the others. A 3D mapping using seaxerocks was conducted in a range of 30 by 30 meters. Many benthic organisms associated with the debris were collected using a suction sampler. Three MBARI cores were collected; two were collected beside the debris and the other 5 m away from the debris as a reference. Squared lumber, a sheet of plywood, a rubber globe and several beer cans were collected.
8 1-2. Preliminary results Dive number: HD#1581 Date: October 8, 2013 Site: Kamaishi Submarine Canyon, off Ohtsuchi Chief observer: Yoshimi TAKAHASHI (JAMSTEC) Main purposes: Observation and sampling of marine tsunami debris and its associated fauna Payload equipment: 1. seaxerocks 1 2. Suction sampler & multiple canisters 1 3. Sampling box 2 4. MBARI corer 3 5. Marker 3 Dive summary Marine tsunami debris was scattered on seafloor in this canyon. A certain population of Chionoecetes opilio was observed primarily in association with Liponema brevicornis. This location seemed to be a nice place to deploy a bio-tracking system used for tracking of C. opilio but the deployment was canceled due to a relatively new, floating, long rope (>300 meters) found during this dive. No biological and sediment sampling were conducted.
9 1-2. Preliminary results Dive number: HD#1582 Date: October 8, 2013 Site: Kamaishi submarine canyon, off Ohtsuchi Chief observer: Yoshimi TAKAHASHI (JAMSTEC) Main purposes: Observation and sampling of marine tsunami debris and its associated fauna Payload equipment: 1. seaxerocks 1 2. Suction sampler & multiple canisters 1 3. Sampling box 2 4. MBARI corer 3 5. Marker 3 Dive summary Many patches of marine tsunami debris were observed in the Kamaishi Submarine Canyon. The canyon walls were very steep and a dense population of benthic organisms was found around the canyon. A 3D mapping was unable due to the steep topographic structures. Biological sampling was conducted using a suction sampler. No sediment coring was conducted.
10 1-2. Preliminary results Dive number: HD#1583 Date: October 9, 2013 Site: off Miyako Chief observer: Shinji TSUCHIDA (JAMSTEC) Main purposes: Observation and sampling of marine tsunami debris and its associated fauna Payload equipment: 1. seaxerocks 1 2. Suction sampler & multiple canisters 1 3. Sampling box 2 4. MBARI corer 3 5. Marker 3 Dive summary Diving point is a kind of small valley around 6 miles in length from 300 to 600m depths off Miyako. We explored this site for a half-day dive and observed dense patch of ophiuroid starfishes, holothurians, squids, Sebastolobus fish (Kichiji), Godus fish (Madara), and so on, but not snow crabs. Unfortunately this site was not a candidate for bio-tracking survey area because of so many deployed ropes (probably for Haena fishing) were found.
11 1-2. Preliminary results Dive number: HD#1584 Date: October 11, 2013 Site: Kamaishi submarine canyon at Sanriku Chief observer: Yasuo FURUSHIMA (JAMSTEC) Main purposes: The purposes of this submarine voyage are as follows. Retrieval of the base station establishment point of the biotracking system. Sampling of the snow crab to use for a biotracking system Test of the electronic flash of the 3D mapping system Payload equipment: 1. seaxerocks 1 1. Suction sampler & multiple canisters 1 2. Sampling box 1 3. MBARI corer 3 Dive summary The hyper dolphin drifted to the bottom with 435 m depth. The bottom was muddy, and the bottom surface was covered by ophiuroid star fish. Many snow crabs and Liponematid actiniaria were observed. The hyper dolphin went ahead from the grounding point to the west, and collected 12 snow crabs using Suction sampler. While moving, plankton of the intermediate water was sampled with Suction sampler. Finally experimented the electronic flash of seaxerocks in 5m, 4m and 3m depth.
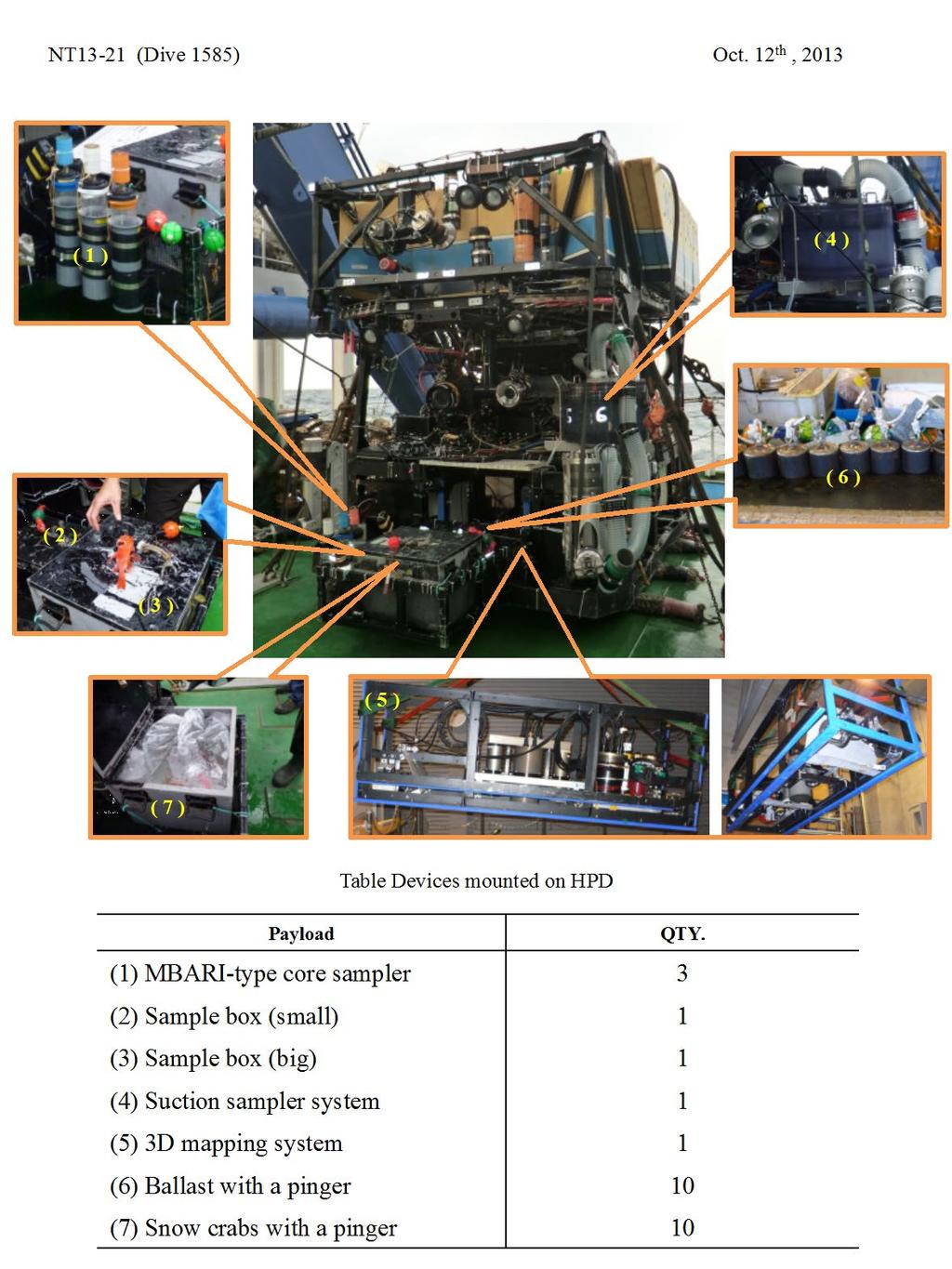
12 1-2. Preliminary results Dive number: HD#1585 Date: October 12, 2013 Site: Off Sanriku-oki Chief observer: Yuya NISHIDA (IIS) Main purposes: Releasing snow crabs and ballasts with a pinger, observation of three stations, and 3D mapping. Payload equipment: 1. seaxerocks 1 2. Suction sampler & multiple canisters 1 3. Sampling box 2 4. MBARI corer 3 5. Marker 3 6. Marker with a pinger Snow crab with a pinger 10 Dive summary Ten snow crabs with a pinger were released on the center point of the triangle constructed by three stations which were deployed by free-fall on the bottom at Oct. 11 th, Ten markers with a pinger were dropped on the seafloor near stations. And stations for bio-tracking system were observed by camera mounted on Hyper-Dolphin. During navigating between stations, 3D mapping system was worked at an altitude of 4.5m.
13 1-2. Preliminary results Dive number: HD#1586 Date: October 13, 2013 Site: Off Kesen-numa Chief observer: Sakiko ORUI (JAMSTEC) Main purposes: 3D mapping around marine tsunami debris and sampling of the debris and its associated fauna 1. Payload equipment: 2. seaxerocks 1 3. Suction sampler & multiple canisters 1 4. Sampling box 2 5. MBARI corer 3 6. Marker 3 Dive summary Several remarkable structures had been found on the flat seafloor off Kesen-numa using a side-scan sonar in March Two of them were observed during this dive. Southern most structure was a big rock, which was inhabited by many organisms, like a fish shelter. The other was a long tree. The biomass around the tree was much larger than that in the surrounding environments. 3D mapping were conducted using seaxerocks in several regions but one of the cameras, that took images of a laser line, did not work. Three MBARI cores were collected; one at 2 m away from the tree and two at beside the tree. Organisms associated with the tree were collected on/around the tree using a suction sampler.
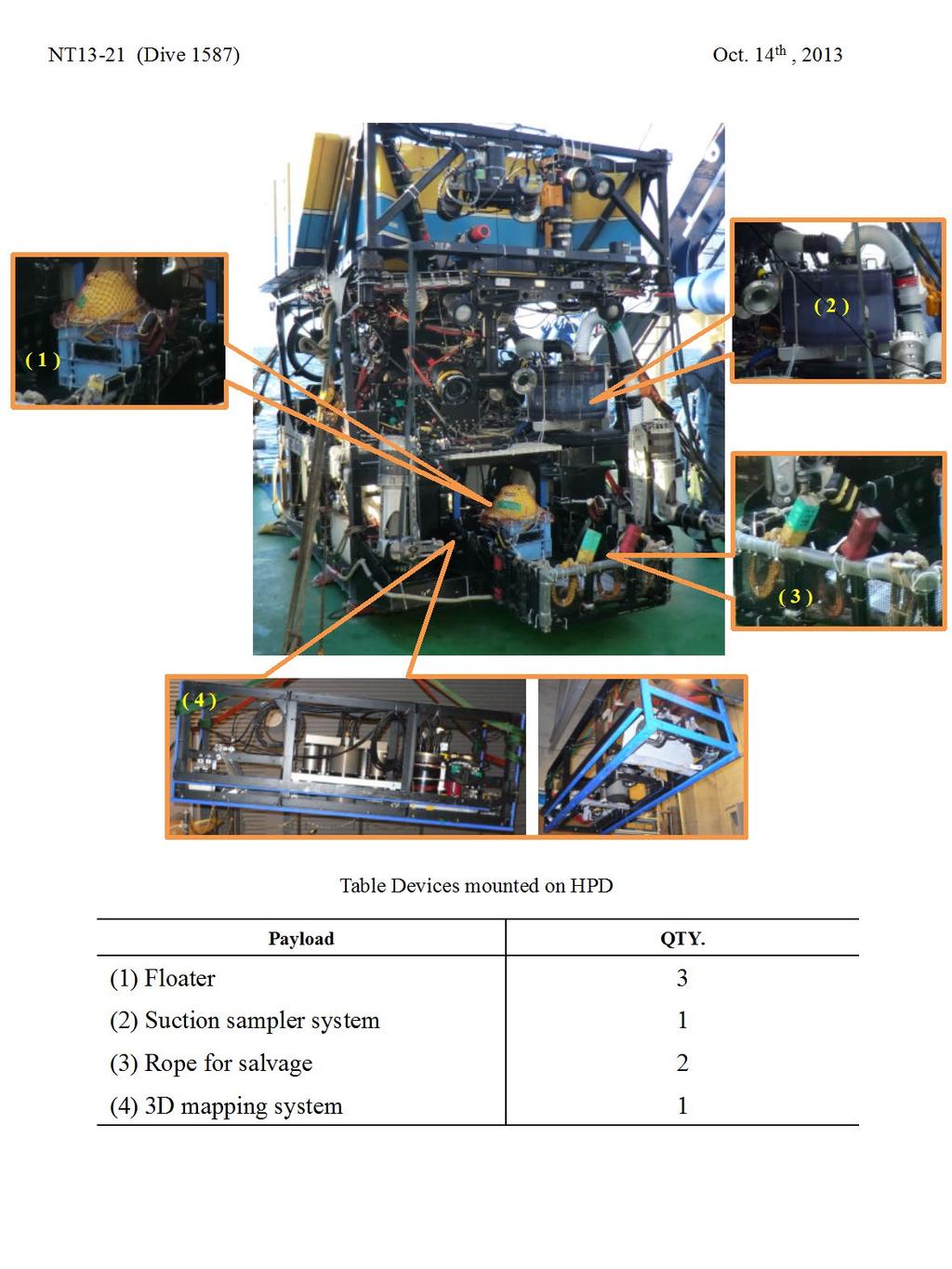
14 1-2. Preliminary results Dive number: HD#1587 Date: October 14, 2013 Site: Off Otsuchi 1000m Lander points Chief observer: Yasuo FURUSHIMA (JAMSTEC) Main purposes: The purposes of this submarine voyage are as follows. Recovery of the lander system Sea-bottom observation Payload equipment: 1. seaxerocks 1 2. Suction sampler & multiple canisters 1 3. Sampling box 1 4. MBARI corer 3 Dive summary Carried out the recovery of the lander system which we installed in August, Before the recovery of the lander system, carried out neighboring sea-bottom observation. The bottom was muddy, and the bottom surface was covered by ophiuroid star fish.
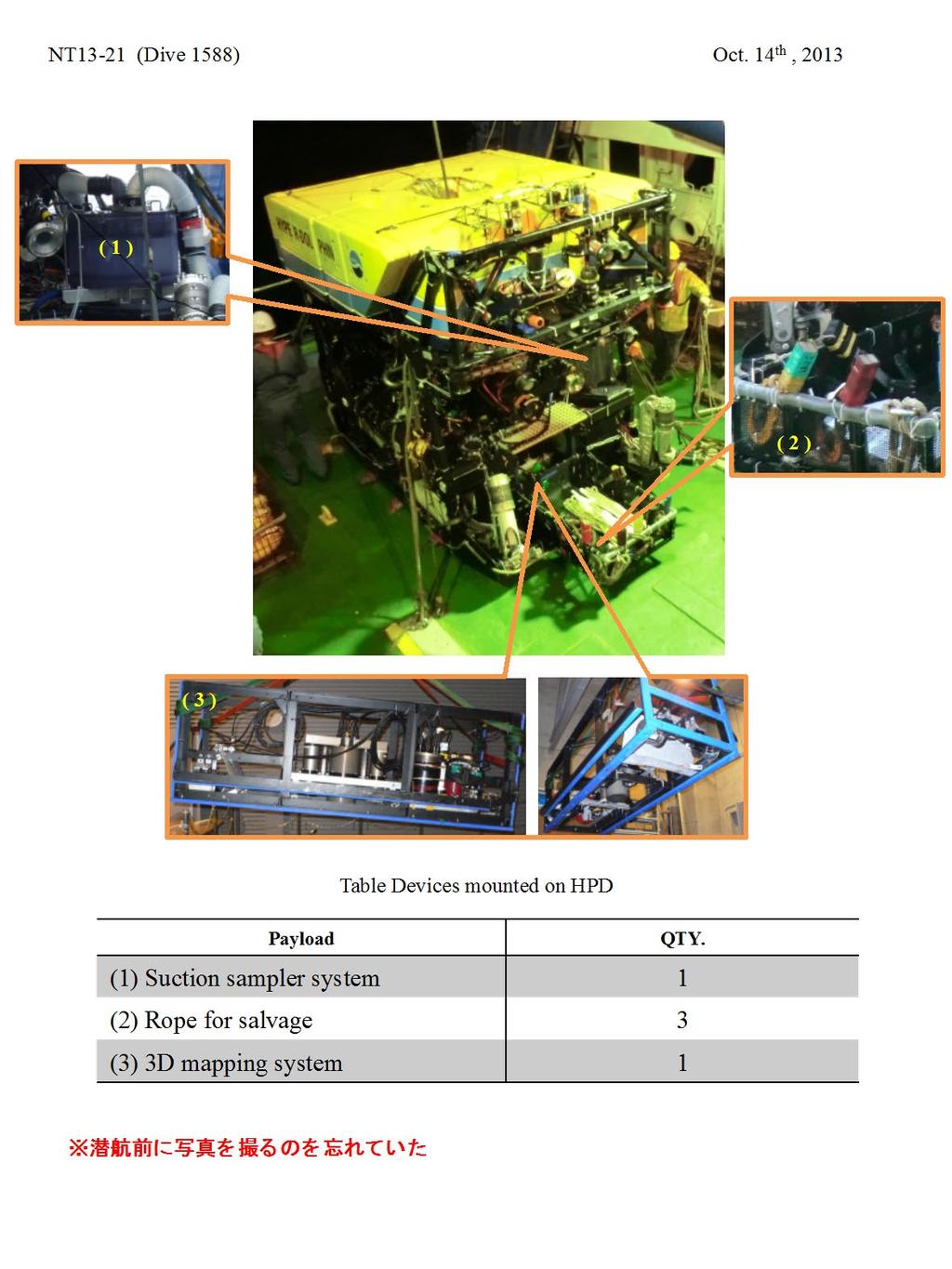
15 1-2. Preliminary results Dive number: HD#1588 Date: October 14, 2013 Site: off Touni Chief observer: Shinji TSUCHIDA (JAMSTEC) Main purposes: Observation and sampling of marine tsunami debris and its associated fauna Payload equipment: 1. seaxerocks 1 2. Snap shackle with rope 2 3. Weight 1 Dive summary This dive was performed to recover the bio-tracking base station, which didn t ascend by transponder releasing command. HPD landed at the north about 100m far from the No.2 station. We approached to it using ROV homer and easily found. At the front of the station, we carefully observed the position of buoy, flames, and ropes. Then we fucked the snap shackle with rope on the ring rope attached on the buoy and flame. Finally we succeeded to recover the No.2 bio-tracking base station.
16 1-2. Preliminary results Dive number: HD#1589 Date: October 14, 2013 Site: off Touni Chief observer: Shinji TSUCHIDA (JAMSTEC) Main purposes: Observation and sampling of marine tsunami debris and its associated fauna Payload equipment: 1. seaxerocks 1 2. Snap shackle with rope 2 3. Weight 1 Dive summary This dive was performed to recover the bio-tracking base stations No.1 and 3. HPD landed at the north about 50m far from the No.1 station. We approached to it using ROV homer and easily found. At the front of the station, we carefully observed the position of buoy, flames, and ropes. Then we grasped the rope of the station by HPD manipulator and brought it to the station No.3. Also, we checked the station No.3 carefully put the No.2 beside the No.3. Then we fucked the two shackles with rope on the frame of No.2 and 3 respectively and ascended to the surface. We succeeded to recover the No.1 and 3 stations on the deck of Natsushima.
17 1-2. Preliminary results Dive number: HD#1590 Date: October 18, 2013 Site: Kamaishi submarine canyon Chief observer: Yuya Nishida (IIS) Main purposes: Observation and sampling of marine creatures. Payload equipment: 1. seaxerocks 1 2. Suction sampler & multiple canisters 1 3. Sampling box 2 4. MBARI corer 3 5. Marker 3 Dive summary In this dive, we surveyed oceans trench of about 1,200m depth to find the rubble. The HPD cruised westward along the trench after reaching the seafloor. Although seawater around the seafloor point was muddy by the typhoon, hi-vision camera of the HPD took a clear image of the seafloor in the latter half of the survey. The HPD took the image of several creatures and caught the creatures such as marine sponge and the galatheoidea.
18 1-3. Payload list with photographs
19
20
21
22
23
24
25
26
27
28
29

30 2. 3D mapping survey The 3D image mapping was primarily carried out in four locations during the cruise. On the first dive HPD#1580 on 2013/10/7 a 30mx 30m area with tsunami debris was surveyed. An altitude of 4m meter was maintained during the mapping and a lawnmower pattern survey was made at an average speed of 30cm/s. The survey took about 30min to complete. During the survey one camera was used to capture the sheet laser images at a frame rate of 15fps and another camera was used to capture flash illuminated images are a slow rate of 1 frame every 6seconds. A total of 8 transects were made to cover the 30mx30m area. To assist ROV pilot to make accurate transects and specially developed software called robotstate was used. The robot state program receives the DVL data in real time and updates the position of the ROV on a GUI at a rate of 3Hz. A screen shot of the GUI during the survey is shown in Fig. 1. It is possible to feed in the length and breadth of the area to be surveyed and the program plots the transects on the screen. The expected speed of ROV during survey can be input and the Fig. 1 GUI of the robotstate program program calculates and displays the time required to complete the transects. The GUI also displays the altitude of the vehicle and speed of the vehicle.




31 Fig. 2 Laser Profile and Flashed image used to generate 3D map Target altitude and speed can be represented on the GUI to assist the ROV pilot to maintain the necessary altitude and speed that is ideal for the 3D mapping. The robot state program was run on the laptop of the 3D mapping team and it was also displayed on a screen in front of the ROV pilot. The program was found to be very useful in making accurate lawnmower patterns transects for the 3D mapping. A 3D map generated from the survey data is shown in Fig. 3. The laser profile image and the illuminated image of the seafloor shown in Fig. 2 is used along with navigation data to generate the 3D map. The map shown Tsunami debris Fig. 3 3D map of the Surveyed area with Tsunami debris visible. in the image is approximately 14m long and 5m wide. The tsunami debris patch has a height of 1m, length of 4m and width of 2.4m. Such three dimensional measurement can be used to accurately calculate volume of debris and the effect it has on the ecosystem around the area. The 3D data of the tsunami debris reminds us about the strength of natural disasters and sufferings faced by the people of Tohoku region and stresses the importance of preventive safety measures for safe guarding the community living in coastal areas.
32 During the cruise 3D mapping data was also obtained in several other areas. The data will be processed and used by the scientists to understand the topography of the areas under study and its ecosystem. The data will be also useful to improve the accuracy and efficiency of the mapping system.
33 3. Long-term measurement (Furushima) The earth and sand which flowed in by great earthquake from the coastal region would have a serious influence on the environment of bottom topography and the marine surface sediment of the Sanriku offshore area. Simultaneity, would also affect the environment of the biomass in the offing. Therefore we initiated a long-term environmental measurement about the marine organism resources environment using lander systems from last August to monitor a reactivation process of the sea bottom environment with surroundings. Video camera, CTD, RDCP (Recording Doppler Current Profiler), turbidity sensor and DO sensor were put on a lander system. In this cruise, we recovered using hyper dolphin by the lander system which we established in the Otsuchi offing last year. In addition, we carry out the detailed analysis of obtained data after this.
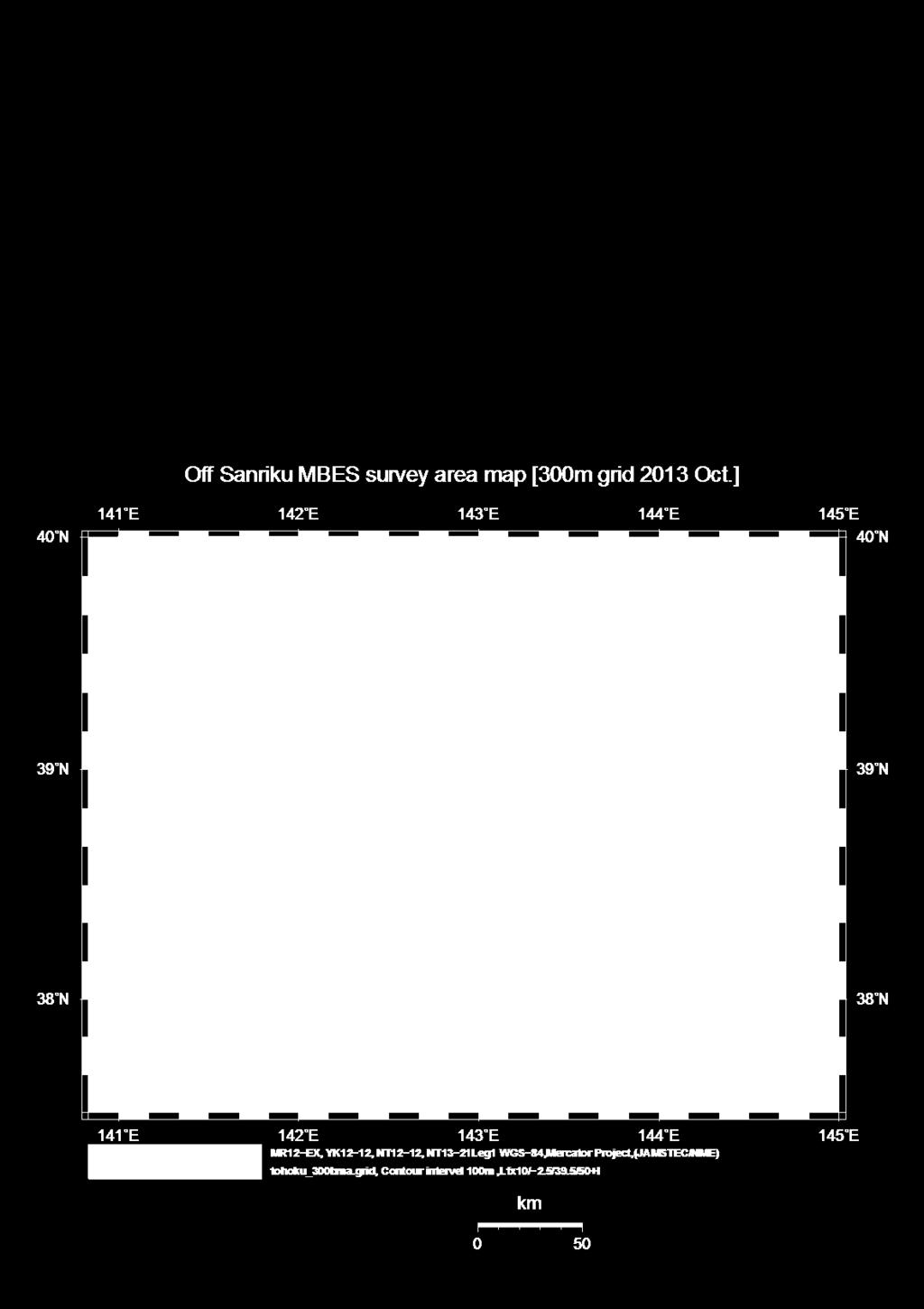
34 4. Geophysical survey results Bathymetric data were collected by a hull-mounted multi-narrow beam mapping system SEABAT8160 aboard R/V Natsushima. The SEABAT system has hydrophone arrays that synthesize narrow,fan-shaped beams. The width of the sea floor mapping in a single swath is generally ca.0.7 times thelocal water depth, and the resolution of the depth measurement is generally within 0.25 % of the water depth. The SEABAT system can collect up to 126 soundings on each ping cycle over depths varying from 10 to 3,000 meters, providing swath width coverage up to 150. The sound velocity profile of the local water column, which was used for calibration of depth, was estimated from a temperature profile based on in-situ XBT (Expendable Bathythermograph) measurements. Figure 4-1 shows the mapped areas by the SEABAT system during this cruise. Figure 4-2 and 4-3 shows the mapped areas, which data were compiled in TOHOKU area to obtain in this project cruise (MR12-E01, YK12-12, NT12-12, NT13-21 Leg1, etc.).
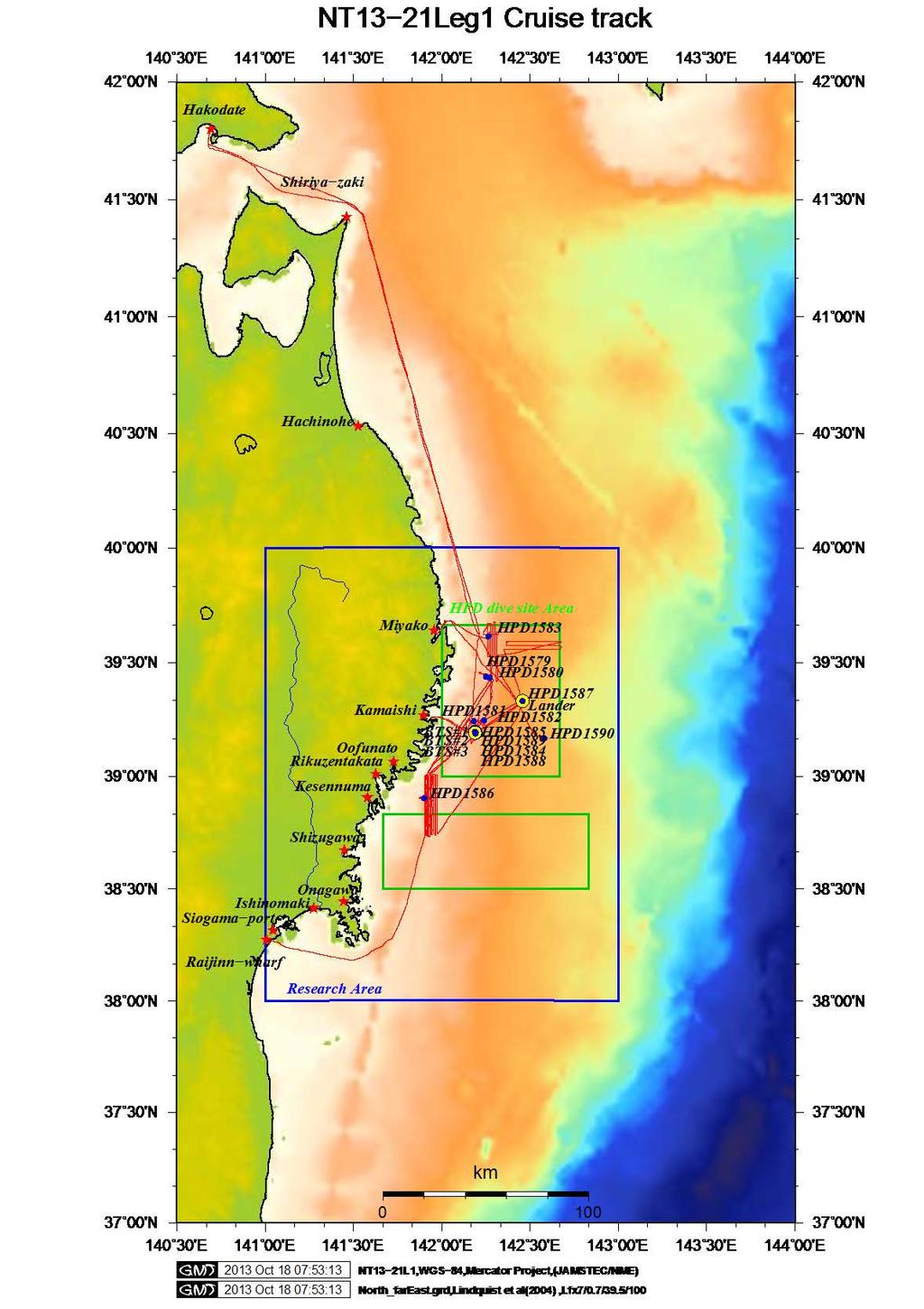
35 Fig. 4-1.
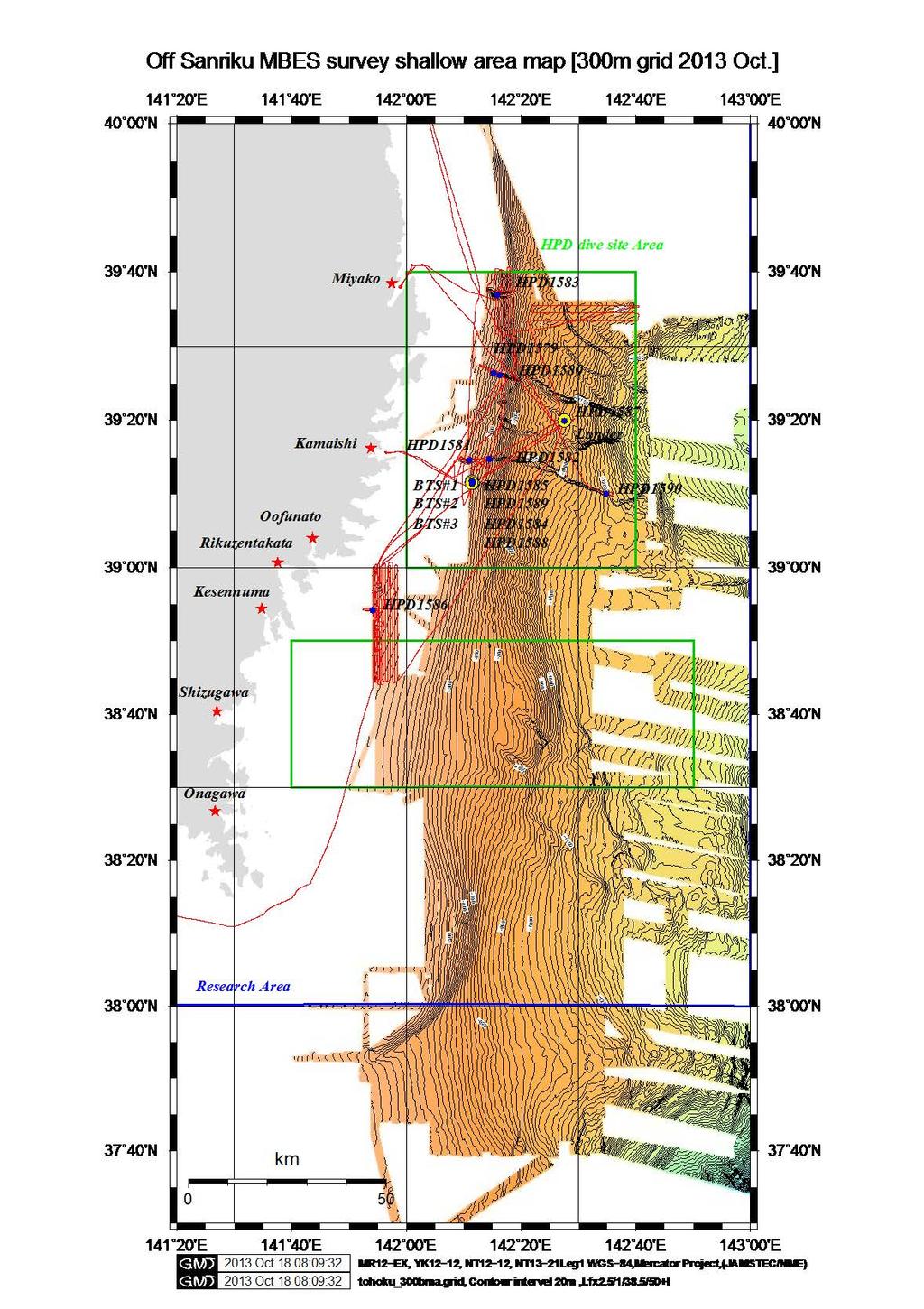
36 Fig. 4-2.
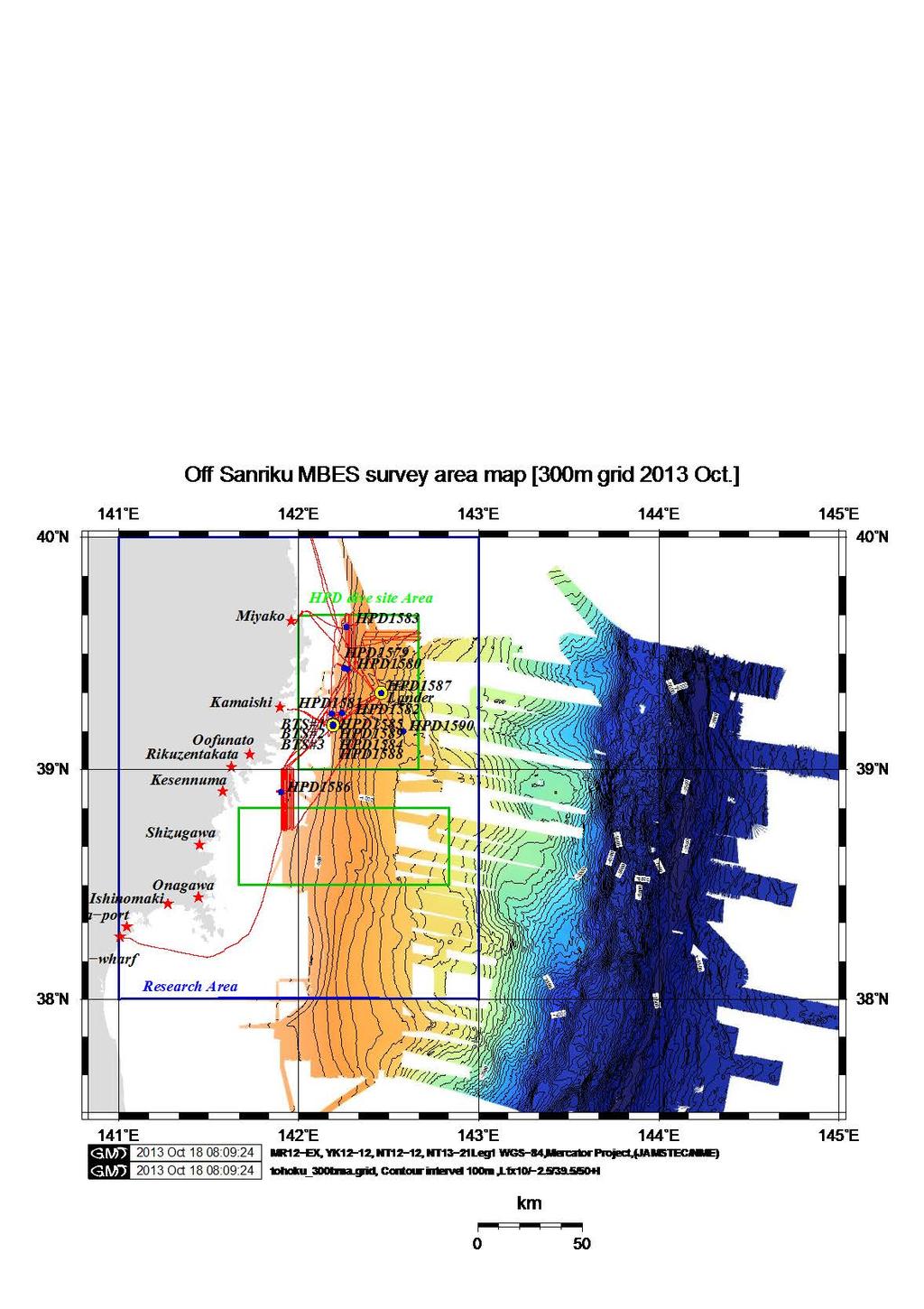
37 Fig. 4-3.
38 5 Scientific results The ROV Hyper-Dolphin dives (dive # ) were conducted off Tohoku from October 6 to 19, 2013 for understanding of influences of the 2011 Tohoku earthquake on the deep-sea ecosystem. The main results were as follows: - Number of marine tsunami debris was small on the deep-sea floor (off Miyagi). - A large amount of marine tsunami debris was distributed in submarine canyons (off Iwate) (Fig ). - Total amount of marine debris was relatively small deeper than 1000 m. - Three-dimensional mapping of deep-sea floors was conducted around marine tsunami debris for understanding of influences of the debris on ecological structures and biomass. - The first deployment of bio-tracking systems was successfully conducted at a depth of 430 m off Tohoku. A mechanical trouble was occurred during recovery but all were safely retrieved. - A deep-sea lander, which was deployed at a depth of 998 m on August 14, 2012, was safely recovered. All the instruments worked well for more than a year. - The most dominant species in this area was ophiuroids like before the earthquake and fishery resources including Sebastolobus macrochir, Gadus macrocephalus and Chionoecetes opilio were widely distributed in our research areas. - Biological sampling and sediment coring were conducted at each dive site.

39 Fig A large amount of marine tsunami debris was distributed in submarine canyons (off Iwate).
40 6. Proposal for the future studies Yoshihiro FUJIWARA - Influence of the 2011 Tohoku earthquake on genetic diversity of Ophiura sarsii. Fujiwara, Y., Takahashi, Y., Kawato, M., T. Fujita, Kuramochi, T. etc. - Influence of marine tsunami debris on ecological structures and biomass off Tohoku, Japan. Fujiwara, Y., Takahashi, Y., Tsuchida, S., Furushima, Y., Fujikura, K., Yamakita, T., etc. Yasuo FURUSHIMA In this cruise, recovered the lander system which we installed in the 1,000m depth point in the Otsuchi (Iwate prefecture) offing last year, and were able to obtain continuous environmental data for approximately one year. (The lander system which we installed in the point of 300m depth was recovered before this cruise by the bottom fishing trawler.) Carry out analysis of these environmental data, and understand the characteristic of the fishery environmental fluctuation in the Sanriku offing (from sea bottom floor to the surface layer). Furthermore, long-term environmental monitoring continues, and carry out by installing lander systems in the point of the Otsuchi offing again. Additionally, it is important that we compare the environmental variation in the coastal region with the environmental measurement result provided by a lander system. In the Otsuchi offing, AORI (Atmosphere and Ocean Research Institute University of Tokyo) installs mooring system, and carry out a short-term physical environmental measurement. Therefore we want to try for the understanding of the fishery environmental fluctuation of the Sanriku offing in comparison with the result of AORI. Simultaneously, we want to provide fishermen with effective fishery oceanic conditions information.
41 P.V. aaunnikrishnan 3D mapping system During this cruise we found that in many of the survey areas with relatively shallow depth of 500m, there was lot of marine snow and so the water appeared turbid. Hence visibility was poor and mapping could not be carried out from high altitude. The mapping system used during the present cruise is called Long range mapping system and is specially designed and developed for high altitude mapping from 4m to 10m altitude using strobe lights and high sensitive cameras. However during majority of the survey in this cruise we experienced that it is necessary to survey close to the seafloor at about 1m altitude to search for tsunami debris and to observe the ecosystem in the surrounding areas. Hence we found that it will be more efficient to have a 3D mapping system which is also capable of surveying from close range. We already posses a system called seaxerocks1 which is capable of mapping from about 2meter altitude. Hence in future we propose to develop a hybrid system which has capability of close range as well as long range mapping, so that 3D mapping can be carried out in clear as well as turbid waters and alos during close seafloor observation.
KAIYO Cruise Report. KY15-05Leg2. Construction of DONET2 system. Off Kii Channel. Kumano-nada. March.12 March.29, 2015
 KAIYO Cruise Report KY15-05Leg2 Construction of DONET2 system Off Kii Channel Kumano-nada March.12 March.29, 2015 Japan Agency for Marine-Earth Science and Technology (JAMSTEC) Contents 1. Cruise Information...
KAIYO Cruise Report KY15-05Leg2 Construction of DONET2 system Off Kii Channel Kumano-nada March.12 March.29, 2015 Japan Agency for Marine-Earth Science and Technology (JAMSTEC) Contents 1. Cruise Information...
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test
 NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
KY10-15 KAIYO / HYPER-DOLPHIN
 KY10-15 KAIYO / HYPER-DOLPHIN Kumano-Nada January 2011 Earthquake and Tsunami Research Project for Disaster Prevention JAMSTEC TABLE OF CONTENTS 1. INTRODUCTION 2. SCHEDULE 3. DIVE RESULTS 4. CONCLUSIONS
KY10-15 KAIYO / HYPER-DOLPHIN Kumano-Nada January 2011 Earthquake and Tsunami Research Project for Disaster Prevention JAMSTEC TABLE OF CONTENTS 1. INTRODUCTION 2. SCHEDULE 3. DIVE RESULTS 4. CONCLUSIONS
NT10-18 NATSUSHIMA / HYPER-DOLPHIN
 NT10-18 NATSUSHIMA / HYPER-DOLPHIN Kumano-Nada October 2010 Earthquake and Tsunami Research Project for Disaster Prevention JAMSTEC TABLE OF CONTENTS 1. INTRODUCTION 2. SCHEDULE 3. DIVE RESULTS 4. CONCLUSIONS
NT10-18 NATSUSHIMA / HYPER-DOLPHIN Kumano-Nada October 2010 Earthquake and Tsunami Research Project for Disaster Prevention JAMSTEC TABLE OF CONTENTS 1. INTRODUCTION 2. SCHEDULE 3. DIVE RESULTS 4. CONCLUSIONS
R/V Natsushima Cruise Report NT15-21
 R/V Natsushima Cruise Report NT15-21 Survery for SIP cable observation system Off Izu-Oshima Dec.8,2015-Dec.16,2015 Japan Agency for Marine-Earth Science and Technology (JAMSTEC) Contents 1. Cruise Information
R/V Natsushima Cruise Report NT15-21 Survery for SIP cable observation system Off Izu-Oshima Dec.8,2015-Dec.16,2015 Japan Agency for Marine-Earth Science and Technology (JAMSTEC) Contents 1. Cruise Information
KAIYO CRUISE REPORT. KY15-16 Leg1
 KAIYO CRUISE REPORT KY15-16 Leg1 Construction of DONET2 Off Kii Channel Oct.16,2015-Nov.6,2015 Japan Agency for Marine-Earth Science and Technology (JAMSTEC) 1 Contents 1. Cruise Information -----------------------------------------
KAIYO CRUISE REPORT KY15-16 Leg1 Construction of DONET2 Off Kii Channel Oct.16,2015-Nov.6,2015 Japan Agency for Marine-Earth Science and Technology (JAMSTEC) 1 Contents 1. Cruise Information -----------------------------------------
Natsushima Cruise Report NT Sea trial of Autonomous Underwater Vehicle. Yumeiruka around Omuro-dashi. Sagami Bay, Suruga Bay and Omuro-dashi
 Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
Natsushima Cruise Report NT15-11 Sea trial of Autonomous Underwater Vehicle Yumeiruka around Omuro-dashi Sagami Bay, Suruga Bay and Omuro-dashi July 5, 2015 July 10, 2015 Japan Agency for Marine-Earth
1. On site calibration of a pressure gage using a mobile. 2. Temporal variation of Rn emanation at faults
 R/V Natsushima Cruise Report NT14-13 Title of the cruise 1. On site calibration of a pressure gage using a mobile pressure sensor 2. Temporal variation of Rn emanation at faults survey area: off Kumano-nada
R/V Natsushima Cruise Report NT14-13 Title of the cruise 1. On site calibration of a pressure gage using a mobile pressure sensor 2. Temporal variation of Rn emanation at faults survey area: off Kumano-nada
Location: Barkley Canyon Date: September 9, 2013 Constraints: none
 Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
Page 1 of 11 DIVE PLAN R1650 Location: Barkley Canyon Date: September 9, 2013 Constraints: none Objectives Deploy POD 1 autonomous CTD Survey POD 3 for sediment enrichment sites; deposit cages; collect
JAMSTEC trial of 11,000m UROV
 JAMSTEC trial of 11,000m UROV Representative : Kikuo Hashimot (Director) Presenting : Hidehiko Nakajoh Japan Agency for Marine Earth Science and Technology ( JAMSTEC ) 2-15 Natsushima-cho Yokosuka, Japan
JAMSTEC trial of 11,000m UROV Representative : Kikuo Hashimot (Director) Presenting : Hidehiko Nakajoh Japan Agency for Marine Earth Science and Technology ( JAMSTEC ) 2-15 Natsushima-cho Yokosuka, Japan
Institute of Marine Research
 Institute of Marine Research CRUISE REPORT NO. ** R/V G.O. Sars Cruise No. 2005108 9 th June 24 th June 2005 Coral survey off Northern Norway Principal Scientist J. H. Fosså 2005 Benthic Habitat Research
Institute of Marine Research CRUISE REPORT NO. ** R/V G.O. Sars Cruise No. 2005108 9 th June 24 th June 2005 Coral survey off Northern Norway Principal Scientist J. H. Fosså 2005 Benthic Habitat Research
IFREMER, Department of Underwater Systems, Toulon, France. L u c i e Somaglino, P a t r i c k J a u s s a u d, R o main P i a s co, E w e n Raugel
 F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
F i r s t s e a t r i a l s w i t h E M 2 0 4 0 m u l t i b e a m s o u n d e r i n n o v a t i v e i n t e g r a t i o n o n H y b r i d R O V A r i a n e IFREMER, Department of Underwater Systems, Toulon,
INTERNATIONAL HYDROGRAPHIC REVIEW MAY 2015
 OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
OPERATION TIRÚA: HYDROGRAPHIC VISION N.A. Guzmán Montesinos Naval Hydrographic Engineer Head of the Information Technology Department Head of the Chilean Tsunami Warning Center, Chile Abstract On 6 October
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI
 Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
Mitsui Engineering & Shipbuilding Co., LTD. Kenji NAGAHASHI kenji_nagahashi@mes.co.jp Contents 1. Underwater Robots produced by MES 2. Future Concept 2 Image of Underwater Works Research Vessel Communication
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks
 In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
In-Water Mass Spectrometry for Characterization of Light Hydrocarbon Seeps and Leaks R. T. Short, S. K. Toler, A. M. Cardenas-Valencia, S. Untiedt, C. Cullins, M. Ryder, and J. Kloske HEMS Workshop 2015
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys
 Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Potential applications of AUVs and Gliders in Offshore Windfarm Site Surveys Dr James Hunt (National Oceanography Centre, Southampton) MREKE Internship in partnership with MARS at NOCS Introduction to
Underwater Robots Jenny Gabel
 Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Underwater Robots Jenny Gabel 06.01.2014 Table of Contens Introduction Challenges of Underwater Exploration Remotely Operated Vehicles Autonomous Underwater Vehilces Future Perspectives References 2 Introduction
Sentry de-brief summaries 2011/2012
 Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
Three cruises*: 1 Sentry/TowCam 1 Sentry/TowMag 1 Sentry/Jason *All cruises were post-refit 1 Pre-Cruise Planning: For two cruises everything was fine and went well For 1 cruise - planning began just one
DIVE PLAN Leg 1 Dive 11 Recover Wally 1
 DIVE PLAN Leg 1 Dive 11 Recover Wally 1 Page 1 of 6 Location: Barkley Canyon Date: 9 May, 2014 14:00 Constraints: Weather, Sufficient deck space ROV Dive # OE 114 Objectives Prepare Wally I cable for recovery
DIVE PLAN Leg 1 Dive 11 Recover Wally 1 Page 1 of 6 Location: Barkley Canyon Date: 9 May, 2014 14:00 Constraints: Weather, Sufficient deck space ROV Dive # OE 114 Objectives Prepare Wally I cable for recovery
The MEDUSA Deep Sea and FUSION AUVs:
 1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
1 The MEDUSA Deep Sea and FUSION AUVs: When Research and business get together EMRA 2017, Girona, Spain 15 May 2017 Bruno Cardeira/IST Deep Ocean Exploration -Why the effort? Portugal Exclusive Economic
Seismic Survey Designs for Converted Waves
 Seismic Survey Designs for Converted Waves James A. Musser* GMG/AXIS Inc., Denver, CO 1720 Red Cloud Road, Longmont, CO, 80501, USA jmusser@gmg.com ABSTRACT Designing converted wave 3D surveys is considerably
Seismic Survey Designs for Converted Waves James A. Musser* GMG/AXIS Inc., Denver, CO 1720 Red Cloud Road, Longmont, CO, 80501, USA jmusser@gmg.com ABSTRACT Designing converted wave 3D surveys is considerably
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions
 Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Pioneer Array Micro-siting Public Input Process Frequently Asked Questions The National Science Foundation (NSF) has completed the micro-siting of the moored array of the Ocean Observatories Initiative
Oceanographic Research With The LiquID Station
 Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
Oceanographic Research With The LiquID Station Application Note OCEANOGRAPHIC RESEARCH The field of oceanography relies on knowing the precise physical, chemical, and biological state of seawater at different
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area.
 BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
BOTTOM MAPPING WITH EM1002 /EM300 /TOPAS Calibration of the Simrad EM300 and EM1002 Multibeam Echo Sounders in the Langryggene calibration area. by Igor Kazantsev Haflidi Haflidason Asgeir Steinsland Introduction
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Survey design and acquisition of a 4-C ocean-bottom seismometer survey over the White Rose oilfield, offshore Newfoundland
 White Rose OBS, 2002 Survey design and acquisition of a 4-C ocean-bottom seismometer survey over the White Rose oilfield, offshore Newfoundland Kevin W. Hall and Robert R. Stewart ABSTRACT CREWES, in conjunction
White Rose OBS, 2002 Survey design and acquisition of a 4-C ocean-bottom seismometer survey over the White Rose oilfield, offshore Newfoundland Kevin W. Hall and Robert R. Stewart ABSTRACT CREWES, in conjunction
MAPCO2 Buoy Metadata Report Project Title:
 MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
MAPCO2 Buoy Metadata Report Project Title: Autonomous Multi-parameter Measurements from a Drifting Buoy During the SO GasEx Experiment Funding Agency: NOAA Global Carbon Cycle program PI(s): Christopher
Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution Joseph D. Warren School of Marine and Atmospheric
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fine-Scale Survey of Right and Humpback Whale Prey Abundance and Distribution Joseph D. Warren School of Marine and Atmospheric
Acoustic Pipeline Inspection Mind The Gap
 Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Acoustic Pipeline Inspection Mind The Gap Mike Liddell Chief Surveyor, Fugro Survey Limited UUVS @ Oceanology 2012 13 th March 2012 Contents Menu Introduction to Pipeline Inspection The Current Toolkit
Robin J. Beaman. School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia.
 Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Robin J. Beaman School of Earth and Environmental Sciences, James Cook University, Cairns, Qld 4870, Australia. Email: robin.beaman@jcu.edu.au Seminar to SSSI Qld Hydrography Coping with Nature, Brisbane,
Tools of Oceanography Ocean Currents. Drift Bottles and Dyes: measures speed and direction of ocean currents.
 Tools of Oceanography Ocean Currents Drift Bottles and Dyes: measures speed and direction of ocean currents. Ekman Current Meters: measures speed and direction of currents in deep water. Ocean Water Sampling
Tools of Oceanography Ocean Currents Drift Bottles and Dyes: measures speed and direction of ocean currents. Ekman Current Meters: measures speed and direction of currents in deep water. Ocean Water Sampling
Emerging Subsea Networks
 THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
THE FUTURE OF MARINE SURVEY APPLICATIONS FOR SUBMARINE CABLES Ryan Wopschall (Fugro) Email: rwopschall@fugro.com Fugro Pelagos, Inc. - 3574 Ruffin Road, San Diego, California 92123 USA Abstract: New advances
R/V Natsushima Cruise Report NT Title of the cruise. Boso Peninsula and development of in situ calibration for. DONET pressure gauge
 R/V Natsushima Cruise Report NT15-12 Title of the cruise Deploy and retrieval of ocean bottom instruments at off Boso Peninsula and development of in situ calibration for DONET pressure gauge July15,2015-July
R/V Natsushima Cruise Report NT15-12 Title of the cruise Deploy and retrieval of ocean bottom instruments at off Boso Peninsula and development of in situ calibration for DONET pressure gauge July15,2015-July
Alvin Debrief Summary Seven Cruises for 91 dives. Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos
 Seven Cruises for 91 dives Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos Overview All the PIs were very satisfied with their Alvin experience and felt that their scientific goals
Seven Cruises for 91 dives Southern California Juan de Fuca Costa Rica Guaymas Basin Galapagos Overview All the PIs were very satisfied with their Alvin experience and felt that their scientific goals
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters
 Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
Utilizing Vessel Based Mobile LiDAR & Bathymetry Survey Techniques for Survey of Four Southern California Breakwaters Western Dredging Association: Pacific Chapter September 2012 Insert: Pipe Location
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS
 SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
Boost Your Skills with On-Site Courses Tailored to Your Needs
 Boost Your Skills with On-Site Courses Tailored to Your Needs www.aticourses.com The Applied Technology Institute specializes in training programs for technical professionals. Our courses keep you current
Boost Your Skills with On-Site Courses Tailored to Your Needs www.aticourses.com The Applied Technology Institute specializes in training programs for technical professionals. Our courses keep you current
Body Search and Recovery Using Sonar
 Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
Body Search and Recovery Using Sonar Photos Mark W. Atherton Mark W. Atherton, Echoes and Images Image courtesy FBI Dive Team Images not for distribution. All photographs and drawings courtesy and Mark
14/10/2013' Bathymetric Survey. egm502 seafloor mapping
 egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
egm502 seafloor mapping lecture 10 single-beam echo-sounders Bathymetric Survey Bathymetry is the measurement of water depths - bathymetry is the underwater equivalent of terrestrial topography. A transect
Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement
 SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
SHEPD Section ID 154 Scottish Hydro Electric Power Distribution Operation, Inspection, Maintenance and Decommissioning Strategy Bute Cumbrae Cable Replacement Contents Definitions and Abbreviations...
NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader Community
 Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Agenda Item B.3.b Supplemental OOI PowerPoint April 2013 Ocean Observatories Initiative NSF's Ocean Observatories Initiative: Building Research Infrastructure for the Pacific Northwest and the Broader
Sea Views SEACAMS. month s edition. In this. Business aboard the RV Prince Madog What do seals do underwater? All aboard the RV Prince Madog
 February 2013 SEACAMS Sea Views In this month s edition Business aboard the RV Prince Madog What do seals do underwater? All aboard the RV Prince Madog 0845 519 9029 www.seacams.ac.uk ebost: email: info@seacams.ac.uk
February 2013 SEACAMS Sea Views In this month s edition Business aboard the RV Prince Madog What do seals do underwater? All aboard the RV Prince Madog 0845 519 9029 www.seacams.ac.uk ebost: email: info@seacams.ac.uk
Challenges in determining water surface in airborne LiDAR topobathymetry. Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014
 Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
Challenges in determining water surface in airborne LiDAR topobathymetry Amar Nayegandhi, Dewberry 15 th Annual JALBTCX Workshop, June 11 th 2014 Why topobathy LiDAR? Complements acoustic (multi-beam sonar)
KAIREI Cruise Report. KR17-11 Leg2
 KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
KAIREI Cruise Report KR17-11 Leg2 Study of adaptive underwater Optical wireless communication with photomultiplier tube Suruga bay July 26 th, 2017 Japan Agency for Marine-Earth Science and Technology
Deep SOLO. Nathalie Zilberman, Dean Roemmich, and SIO float lab. 1. Deep SOLO float characteristics. 2. Deep SOLO float Deployment
 Deep SOLO Nathalie Zilberman, Dean Roemmich, and SIO float lab 1. Deep SOLO float characteristics 2. Deep SOLO float Deployment 3. Deep SOLO temperature and salinity Deep SOLO Float deployment, R/V Tangaroa
Deep SOLO Nathalie Zilberman, Dean Roemmich, and SIO float lab 1. Deep SOLO float characteristics 2. Deep SOLO float Deployment 3. Deep SOLO temperature and salinity Deep SOLO Float deployment, R/V Tangaroa
Figure 8: Buoyancy Force and Weight Acting on an Object
 Working in Water 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and operation
Working in Water 2 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and operation
Cruise Report. Field Oceanography. Team 5, Leg 3
 Cruise Report Field Oceanography Team 5, Leg 3 Submitted by: Lina Stolze Allison Kennedy Madlena Hukobyan Peter Hülse Date: October 27, 2008 1. Objectives The fieldwork was part of a field oceanography
Cruise Report Field Oceanography Team 5, Leg 3 Submitted by: Lina Stolze Allison Kennedy Madlena Hukobyan Peter Hülse Date: October 27, 2008 1. Objectives The fieldwork was part of a field oceanography
A New Generator for Tsunami Wave Generation
 Journal of Energy and Power Engineering 10 (2016) 166-172 doi: 10.17265/1934-8975/2016.03.004 D DAVID PUBLISHING Tetsuya Hiraishi 1, Ryokei Azuma 1, Nobuhito Mori 2, Toshihiro Yasuda 2 and Hajime Mase
Journal of Energy and Power Engineering 10 (2016) 166-172 doi: 10.17265/1934-8975/2016.03.004 D DAVID PUBLISHING Tetsuya Hiraishi 1, Ryokei Azuma 1, Nobuhito Mori 2, Toshihiro Yasuda 2 and Hajime Mase
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010)
") RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
RR10106 Cruise Plan ITOP Mooring Recovery and PhilSea10 Seaglider Operation (R/V Revelle November 6-26, 2010) Chief Scientist: Ren-Chieh Lien, Applied Physics Lab, University of Washington Co-Chief Scientist:
FINAL REPORT DERELICT FISHING GEAR IDENTIFICATION AND REMOVAL PROJECT PORT SUSAN
 1900 W. NICKERSON, STE. 207 SEATTLE, WASHINGTON 98119-1650, U.S.A. TELEPHONE: (206) 285-3480 TELEFAX: (206) 283-8263 E-Mail : jjune@nrccorp.com (corporate) FINAL REPORT DERELICT FISHING GEAR IDENTIFICATION
1900 W. NICKERSON, STE. 207 SEATTLE, WASHINGTON 98119-1650, U.S.A. TELEPHONE: (206) 285-3480 TELEFAX: (206) 283-8263 E-Mail : jjune@nrccorp.com (corporate) FINAL REPORT DERELICT FISHING GEAR IDENTIFICATION
Stability of Temperature and Conductivity Sensors of Argo Profiling Floats
 Journal of Oceanography, Vol. 6, pp. 5 to 58, Short Contribution Stability of Temperature and Conductivity Sensors of Argo Profiling Floats EITAROU OKA * and KENTARO ANDO Frontier Observational Research
Journal of Oceanography, Vol. 6, pp. 5 to 58, Short Contribution Stability of Temperature and Conductivity Sensors of Argo Profiling Floats EITAROU OKA * and KENTARO ANDO Frontier Observational Research
Right Whale Diving and Foraging Behavior in the Southwestern Gulf of Maine
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Right Whale Diving and Foraging Behavior in the Southwestern Gulf of Maine Mark Baumgartner Woods Hole Oceanographic Institution
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Right Whale Diving and Foraging Behavior in the Southwestern Gulf of Maine Mark Baumgartner Woods Hole Oceanographic Institution
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping
 Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Evaluation of the Klein HydroChart 3500 Interferometric Bathymetry Sonar for NOAA Sea Floor Mapping Yuhui Ai, Straud Armstrong and Dean Fleury L-3 Communications Klein Associates, Inc. 11 Klein Dr. Salem,
Country report - India NATIONAL INSTITUTE OF OCEAN TECHNOLOGY 07/10/2010
 Country report - India NATIONAL INSTITUTE OF OCEAN TECHNOLOGY 07/10/2010 XXVI DBCP meeting 28 September 2010 Department of Civil Engineering, NIT Trichy 2 FOCUS 1/5 of world population 50 % living along
Country report - India NATIONAL INSTITUTE OF OCEAN TECHNOLOGY 07/10/2010 XXVI DBCP meeting 28 September 2010 Department of Civil Engineering, NIT Trichy 2 FOCUS 1/5 of world population 50 % living along
Summary of Research within Lamlash Bay No-Take Zone - Science report for COAST July
 Summary of Research within Lamlash Bay No-Take Zone - Science report for COAST July 2013 - *Picture of a spider crab (Macropodia spp) inside a plumose anemone. Taken within Lamlash Bay No-Take Zone by
Summary of Research within Lamlash Bay No-Take Zone - Science report for COAST July 2013 - *Picture of a spider crab (Macropodia spp) inside a plumose anemone. Taken within Lamlash Bay No-Take Zone by
Design and Planning Considerations For a Seabed Survey
 Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Design and Planning Considerations For a Seabed Survey Vera Quinlan Hydrographer & Data Processor Seabed Survey Overview Survey Platform - What boat do I use? Survey Area / depth of water / objective &
Hydrographic Surveying Methods, Applications and Uses
 Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Definition: Hydrographic Surveying Methods, Applications and Uses It is the branch of surveying which deals with any body of still or running water such as a lake, harbor, stream or river. Hydrographic
Wave-Phase-Resolved Air-Sea Interaction
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Wave-Phase-Resolved Air-Sea Interaction W. Kendall Melville Scripps Institution of Oceanography (SIO) UC San Diego La Jolla,
Marine Mammal Acoustic Tracking from Adapting HARP Technologies
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Marine Mammal Acoustic Tracking from Adapting HARP Technologies Sean M. Wiggins and John A. Hildebrand Marine Physical
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Marine Mammal Acoustic Tracking from Adapting HARP Technologies Sean M. Wiggins and John A. Hildebrand Marine Physical
JIMAR PFRP ANNUAL REPORT FOR FY 2006
 JIMAR PFRP ANNUAL REPORT FOR FY 2006 P.I./Sponsor Name: Michael P. Seki and Jeffrey J. Polovina Project Proposal Title: Oceanographic Characterization of the American Samoa Longline Fishing Grounds for
JIMAR PFRP ANNUAL REPORT FOR FY 2006 P.I./Sponsor Name: Michael P. Seki and Jeffrey J. Polovina Project Proposal Title: Oceanographic Characterization of the American Samoa Longline Fishing Grounds for
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
Panel Discussion on unmanned Hydrography
 Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Panel Discussion on unmanned Hydrography Overview Why bother General Types Autonomous Underwater Vehicle (AUV) Remotely Operated Vehicle (ROV) Unmanned Surface Vessels (USV) TerraSond s Experiences AUV
Development of 7,000m Class ROV KAIKO7000
 Development of 7,000m Class ROV KAIKO7000 H. Sezoko*, T. Murashima*, H. Nakajyoh*, H. Yoshida*, N. Yamauchi** * Research Support Department (RSD), Marine Technology Center (MARITEC) Japan Agency for Marine-Earth
Development of 7,000m Class ROV KAIKO7000 H. Sezoko*, T. Murashima*, H. Nakajyoh*, H. Yoshida*, N. Yamauchi** * Research Support Department (RSD), Marine Technology Center (MARITEC) Japan Agency for Marine-Earth
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
ScanFish Katria. Intelligent wide-sweep ROTV for magnetometer surveys
 ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
ScanFish Katria Intelligent wide-sweep ROTV for magnetometer surveys User-friendly control and monitoring software solution The ScanFish Katria comes with the ScanFish III Flight software, which is an
Figure 4, Photo mosaic taken on February 14 about an hour before sunset near low tide.
 The Impact on Great South Bay of the Breach at Old Inlet Charles N. Flagg and Roger Flood School of Marine and Atmospheric Sciences, Stony Brook University Since the last report was issued on January 31
The Impact on Great South Bay of the Breach at Old Inlet Charles N. Flagg and Roger Flood School of Marine and Atmospheric Sciences, Stony Brook University Since the last report was issued on January 31
Vieques Underwater Demonstration Project
 Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
Vieques Underwater Demonstration Project NOAA Office of Response and Restoration National Ocean Service 2006-2007 2007 University of New Hampshire Joint Hydrographic Center 2006 Science Application International
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2
 REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2 17 19 September 2012 TD/RP/163 REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2 17 19 September
REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2 17 19 September 2012 TD/RP/163 REPORT OF IN HOUSE WORKSHOP ON BENTHIC HABITAT MAPPING ON BOARD M.V. SEAFDEC 2 17 19 September
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 phone: (401) 874-6222
ACOUSTIC ASSESSMENT OF JUVENILE BLUEFIN TUNA AGGREGATIONS: A FEASIBILITY STUDY
 ACOUSTIC ASSESSMENT OF JUVENILE BLUEFIN TUNA AGGREGATIONS: A FEASIBILITY STUDY Annual Progress Report to Northeast Consortium Account #: 111B12 Performance Period: July 1, 2008 to June 30, 2009 Submission
ACOUSTIC ASSESSMENT OF JUVENILE BLUEFIN TUNA AGGREGATIONS: A FEASIBILITY STUDY Annual Progress Report to Northeast Consortium Account #: 111B12 Performance Period: July 1, 2008 to June 30, 2009 Submission
BUYER S GUIDE AQUAlogger 530WTD
 OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
OCEAN & ENVIRONMENTAL BUYER S GUIDE AQUAlogger 530WTD Wireless Temperature and Depth Logger AQUAlogger 530WTD The AQUAlogger 530WTD has an innovative design that includes the ability to transfer stored
Tracking Juvenile Summer Flounder
 Tracking Juvenile Summer Flounder East Coast MARE Materials For the leader: Whiteboard Markers (different colors) For each group: Copies of student group packets Copies of student worksheet Overview Scientists
Tracking Juvenile Summer Flounder East Coast MARE Materials For the leader: Whiteboard Markers (different colors) For each group: Copies of student group packets Copies of student worksheet Overview Scientists
MISSION PLANNING AND DATA ACQUISITION SOFTWARE
 MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
MISSION PLANNING AND DATA ACQUISITION SOFTWARE INTENTIONALLY BLANK Introduction to Divelog Shark Marine s Divelog software was created to integrate data collected from an array of sensors, real-time with
ENVIRONMENTALLY ADAPTIVE SONAR
 ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
ENVIRONMENTALLY ADAPTIVE SONAR Ole J. Lorentzen a, Stig A. V. Synnes a, Martin S. Wiig a, Kyrre Glette b a Norwegian Defence Research Establishment (FFI), P.O. box 25, NO-2027 KJELLER, Norway b University
Wave Glider: Liege Colloquium. Colloquium April 27
 The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
Where are the Bathymetric Hot-Spots?
 Where are the Bathymetric Hot-Spots? Dave Monahan Center for Coastal and Ocean Mapping University of New Hampshire If I win really BIG at the Casino tonight Every now and then, there are news stories of
Where are the Bathymetric Hot-Spots? Dave Monahan Center for Coastal and Ocean Mapping University of New Hampshire If I win really BIG at the Casino tonight Every now and then, there are news stories of
Prediction of Nearshore Waves and Currents: Model Sensitivity, Confidence and Assimilation
 Prediction of Nearshore Waves and Currents: Model Sensitivity, Confidence and Assimilation H. Tuba Özkan-Haller College of Oceanic and Atmospheric Sciences Oregon State University, 104 Ocean Admin Bldg
Prediction of Nearshore Waves and Currents: Model Sensitivity, Confidence and Assimilation H. Tuba Özkan-Haller College of Oceanic and Atmospheric Sciences Oregon State University, 104 Ocean Admin Bldg
FINAL REPORT DERELICT FISHING GEAR REMOVAL PROJECT PORT GARDNER
 1900 W. NICKERSON, STE. 207 SEATTLE, WASHINGTON 98119-1650, U.S.A. TELEPHONE: (206) 285-3480 TELEFAX: (206) 283-8263 E-Mail : jjune@nrccorp.com (corporate) FINAL REPORT DERELICT FISHING GEAR REMOVAL PROJECT
1900 W. NICKERSON, STE. 207 SEATTLE, WASHINGTON 98119-1650, U.S.A. TELEPHONE: (206) 285-3480 TELEFAX: (206) 283-8263 E-Mail : jjune@nrccorp.com (corporate) FINAL REPORT DERELICT FISHING GEAR REMOVAL PROJECT
SCIENCE OF TSUNAMI HAZARDS
 SCIENCE OF TSUNAMI HAZARDS ISSN 8755-6839 Journal of Tsunami Society International Volume 31 Number 2 2012 SEA LEVEL SIGNALS CORRECTION FOR THE 2011 TOHOKU TSUNAMI A. Annunziato 1 1 Joint Research Centre,
SCIENCE OF TSUNAMI HAZARDS ISSN 8755-6839 Journal of Tsunami Society International Volume 31 Number 2 2012 SEA LEVEL SIGNALS CORRECTION FOR THE 2011 TOHOKU TSUNAMI A. Annunziato 1 1 Joint Research Centre,
High Frequency Acoustical Propagation and Scattering in Coastal Waters
 High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
High Frequency Acoustical Propagation and Scattering in Coastal Waters David M. Farmer Graduate School of Oceanography (educational) University of Rhode Island Narragansett, RI 02882 Phone: (401) 874-6222
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY
 THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
THE CHALLENGES OF A LARGE-AREA BATHYMETRIC SURVEY Agenda: - Introduction - Tender - Project Planning - Survey - Processing - Delivery - Conclusion 2 Introduction We know less of the oceans at our feet,
NEED FOR SUPPLEMENTAL BATHYMETRIC SURVEY DATA COLLECTION
 305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
305 West Grand Avenue, Suite 300 Montvale, New Jersey 07645 Phone 201.930.9890 Fax 201.930.9805 www.anchorqea.com M EMORANDUM To: Caroline Kwan and Nica Klaber U.S. Environmental Protection Agency Region
SEA SURFACE TEMPERATURE RETRIEVAL USING TRMM MICROWAVE IMAGER SATELLITE DATA IN THE SOUTH CHINA SEA
 SEA SURFACE TEMPERATURE RETRIEVAL USING TRMM MICROWAVE IMAGER SATELLITE DATA IN THE SOUTH CHINA SEA Mohd Ibrahim Seeni Mohd and Mohd Nadzri Md. Reba Faculty of Geoinformation Science and Engineering Universiti
SEA SURFACE TEMPERATURE RETRIEVAL USING TRMM MICROWAVE IMAGER SATELLITE DATA IN THE SOUTH CHINA SEA Mohd Ibrahim Seeni Mohd and Mohd Nadzri Md. Reba Faculty of Geoinformation Science and Engineering Universiti
Cooperative Navigation for Autonomous Underwater Vehicles. Navigare 2011, 4 May 2011, Bern
 Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
Cooperative Navigation for Autonomous Underwater Vehicles Navigare 2011, 4 May 2011, Bern Distributed Intelligent Systems and Algorithms Laboratory disal.epfl.ch Alexander Bahr Land, atmosphere and sea
6 th Meeting of the Scientific Committee Puerto Varas, Chile, 9-14 September SC6-Doc15 The Russian Federation s Annual Report
 6 th Meeting of the Scientific Committee Puerto Varas, Chile, 9-14 September 2018 SC6-Doc15 The Russian Federation s Annual Report National report of the Russian Federation to the SPRFMO Science Working
6 th Meeting of the Scientific Committee Puerto Varas, Chile, 9-14 September 2018 SC6-Doc15 The Russian Federation s Annual Report National report of the Russian Federation to the SPRFMO Science Working
ISE Subsea Tools and Toolsleds
 1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
Understanding shelf-break habitat for sustainable management of fisheries with spatial overlap
 Understanding shelf-break habitat for sustainable management of fisheries with spatial overlap Alan Williams Caleb Gardner Franziska Althaus Bruce Barker David Mills Final Report to the Fisheries Research
Understanding shelf-break habitat for sustainable management of fisheries with spatial overlap Alan Williams Caleb Gardner Franziska Althaus Bruce Barker David Mills Final Report to the Fisheries Research
Noise Experiment #2. Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA February 22 February 2010
 Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
Noise Experiment #2 Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 92093-0701 16 February 22 February 2010 1. Objective The objective of the noise experiment is to observe
South Bay Coastal Ocean Observing System California Clean Beaches Initiative
 South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report September 2003 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of
South Bay Coastal Ocean Observing System California Clean Beaches Initiative Quarterly Report September 2003 to City of Imperial Beach Eric Terrill 1 1 Scripps Institution of Oceanography, University of
ACCESS the BLUE ECONOMY ALL OCEANS Engineering Ltd
 Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
Subsea Expo 2018 ROV Conference 07.02.2018 ACCESS the BLUE ECONOMY The BLUE ECONOMY - DEFINITION The Blue Economy is a book by Gunter Pauli publish in 2010 based on the idea that he developed in 2004 In
R/V Point Sur Pre-Cruise Questionnaire
 R/V Point Sur Pre-Cruise Questionnaire Please fill this out and return at least 40 days prior to your cruise to ensure that all of your technical needs can be met BASIC INFO Purpose of Cruise: Submitter's
R/V Point Sur Pre-Cruise Questionnaire Please fill this out and return at least 40 days prior to your cruise to ensure that all of your technical needs can be met BASIC INFO Purpose of Cruise: Submitter's
National Report of China
 National Report of China Yu Ting (NMDIS), State Oceanic Administration (SOA), China DBCP 29, 27 Sep. 2013, Paris, France Contents 1 Current program status 2 Future deployment plan 3 Technical development
National Report of China Yu Ting (NMDIS), State Oceanic Administration (SOA), China DBCP 29, 27 Sep. 2013, Paris, France Contents 1 Current program status 2 Future deployment plan 3 Technical development
Survey Technique for Underwater Digital Photography with Integrated GPS Location Data
 Survey Technique for Underwater Digital Photography with Integrated GPS Location Data Tim Siwiec: United States Environmental Protection Agency Abstract This survey technique is an inexpensive method of
Survey Technique for Underwater Digital Photography with Integrated GPS Location Data Tim Siwiec: United States Environmental Protection Agency Abstract This survey technique is an inexpensive method of
HOW TO BEST USE YOUR ELECTRONICS: CHARTING, SONAR, AND IMAGING. By: Captain Tom Blackburn
 HOW TO BEST USE YOUR ELECTRONICS: CHARTING, SONAR, AND IMAGING By: Captain Tom Blackburn Topics I. INTRODUCTION II. CHARTING A TREMENDOUS FISH FINDING TOOL III. CHARTING - SIGNIFICANT CHARTING AND NAVIGATIONAL
HOW TO BEST USE YOUR ELECTRONICS: CHARTING, SONAR, AND IMAGING By: Captain Tom Blackburn Topics I. INTRODUCTION II. CHARTING A TREMENDOUS FISH FINDING TOOL III. CHARTING - SIGNIFICANT CHARTING AND NAVIGATIONAL
Marine Physical Laboratory AD-A TEST OF NEWTONIAN GRAVITY USING DSV SEA CLIFF. MPL-U-48/91 1' -,. = June 1991 \, of California, San Diego
 Es- Marine Physical Laboratory AD-A238 558 TEST OF NEWTONIAN GRAVITY USING DSV SEA CLIFF Final Report to Office of Naval Research Grant N00014-90-J-1063 For the Period 10-01-88-12-31-90 Principal Investigator(s):
Es- Marine Physical Laboratory AD-A238 558 TEST OF NEWTONIAN GRAVITY USING DSV SEA CLIFF Final Report to Office of Naval Research Grant N00014-90-J-1063 For the Period 10-01-88-12-31-90 Principal Investigator(s):
Archimer
 Please note that this is an author-produced PDF of an article accepted for publication following peer review. The definitive publisher-authenticated version is available on the publisher Web site Sea Technology
Please note that this is an author-produced PDF of an article accepted for publication following peer review. The definitive publisher-authenticated version is available on the publisher Web site Sea Technology