Robotic On-Orbit Satellite Servicing: One Size Does Not Fit All
|
|
|
- Franklin Bridges
- 5 years ago
- Views:
Transcription
1 Robotic On-Orbit Satellite Servicing: One Size Does Not Fit All Dr. David L. Akin Dr. Craig R. Carignan Space Systems Laboratory



2 On-Orbit Servicing Demand by Types Reboost Inspection Dexterous Servicing Simple Servicing Total Servicing Market ~$3-5B/year Space Systems Laboratory 2

3 Commercial Satellite Servicing Concept 3 Space Systems Laboratory
4 Robotic Servicing Economics Servicer mass ~ client satellite mass Cost of servicer is comparable to client Launch costs are comparable to client Best solution: replace the satellite Closing the business case Service a number of clients on each mission Limits servicing to low hanging fruit, e.g., refueling or orbit modification Alternative approach Smaller servicers to reduce costs Close business case with dedicated servicing mission 4 Space Systems Laboratory
 5 Space Systems")
5 UMd SmallSat Servicing Concept (1990) 5 Space Systems Laboratory

6 Ranger Telerobotic Flight Experiment 6 Space Systems Laboratory

7 Ranger Neutral Buoyancy Vehicle I 7 Space Systems Laboratory

8 Ranger Telerobotic Shuttle Experiment 8 Space Systems Laboratory
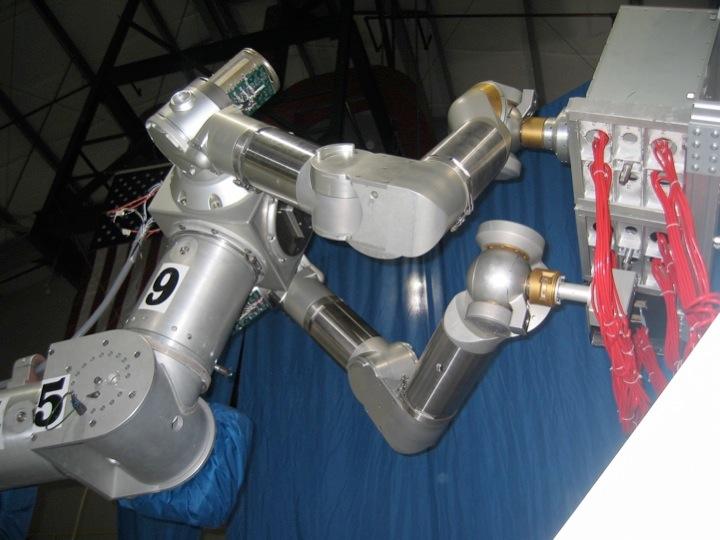





9 Ranger Spacecraft Servicing System 9 Space Systems Laboratory

10 Ranger Arms for SUMO Grappling 10 Space Systems Laboratory

11 Ranger Performing HST AI Changeout 11 Space Systems Laboratory
12 MODSS Dexterous Servicer Concept 100 kg-class operational servicer Maneuvering spacecraft bus using green propellants Dual dexterous manipulators with interchangeable end effectors and grappling arm Capable of performing at EVA equivalence Ideal for operationally responsive dedicated servicing missions 12 Space Systems Laboratory
13 Critical Issues in SmallSat Servicing Robotics Grappling Gross manipulation Dexterous manipulation Dynamics and control Coupled dynamics Stabilization with robotic motion perturbations Operations Low-bandwidth command and control Automation Time delay mitigation 13 Space Systems Laboratory











14 MORPHbot Actuator Technology 14 4 lbs 46 lbs Space Systems Laboratory

15 SAMURAI Deep Submergence Arm 15 Space Systems Laboratory

16 Exoskeleton for Shoulder Rehabilitation 16 5 DOF, capable of lifting itself and subject s arm in Earth gravity Full range and speed of motion equivalence to human Designed for rehabilitation of severe shoulder trauma Safety-critical redundant control architecture to protect patients Space Systems Laboratory


17 Exo-SPHERES Overview Goal was to create a vehicle capable of routine operational use at ISS Interchangeable modules fore & aft for mission specific payloads Teleoperated from ISS using COTS networking protocols 20.3 in in Space Systems Laboratory 13.5 in
18 Inspection Exo-SPHERES Overview Base Vehicle AMP Advanced Mission Packages (AMPs) are attached to the base vehicle, allowing for more science missions and easy upgrades. Example: Inspection AMP which contains lights and cameras in order to do visual inspections Space Systems Laboratory
19 Exo-SPHERES with Inspection AMP kg freeflyer for ISS external ops Advanced Mission Packages (AMPs) for sortie-specific payloads CO2 cold gas propulsion with autonomous docking and replenishment Developed under DARPA and NASA funding Space Systems Laboratory
20 Exo-SPHERES with Servicing AMP 20 Space Systems Laboratory
21 Sortie Timeline (Base Mission) Phase 1: Attach AMP Inside ISS Phase 2: Start Up C&DH start up Run systems checks Phase 3: Deploy from Kibo Phase 5: Return to Kibo airlock Autonomously dock Repressurization Phase 4: Tele-operation Example: inspection mission Up to 8 hour duration Space Systems Laboratory



22 Growth Option: Exposed Facility Interface Operational issues discovered with Kibo airlock No user-available power or data Airlock envelope is very restrictive in volume Consumables loss with every depress/repress cycle Alt recharge/resupply plan Second docking site on Exposed Facility, draws power from station, resupply from attached tanks. Allows external AMP exchange 22 External Base with CO2 Tanks External Base with CO2 Tanks and replacement AMPs Space Systems Laboratory


23 Sortie Timeline (External Basing) Phase 1: Start Up Phase 2: Deploy from Kibo Phase 3: Tele-operation Phase 5: Return to Kibo for major service/ reconfiguration Phase 4: Resupply / Recharge at base Change AMPs Perform repeated sorties Space Systems Laboratory

24 Exo-SPHERES Protoflight Vehicle Exo-SPHERES flight prototype Maximum commonality with flight vehicle configuration, electronics, software Used for thermal vacuum testing; air-bearing table operation Being adapted for parabolic flight testing 24 Space Systems Laboratory

25 EUCLID Neutral Buoyancy Test Vehicle Neutral buoyancy version of Exo-SPHERES Maximum commonality with flight vehicle configuration, electronics, software Allows end-to-end simulation of flight operations in 6 DOF Motion capture cameras provide state vector, used to mitigate water drag effects 25 Space Systems Laboratory


26 NEO Mission ExoSPHERES Design Robotic vehicle for close-proximity navigation, surveying, and scientific investigation around asteroids or comets 26 Space Systems Laboratory

27 DYnamic MAnipulation FLight EXperiment Flight experiment to develop and qualify flight control algorithms for free-flying vehicles with significant manipulator disturbances 4 DOF manipulator with interchangeable tip masses to alter inertias Autonomous operations with periodic downlink to single ground station AFOSR UNP-7 program 27 Space Systems Laboratory
28 DYMAFLEX Manipulator Prototype 28 Space Systems Laboratory


29 Exo-SPHERES for Dexterous Ops AMP with dual dexterous manipulators, vision system Capable of anchor and instrument placement, sample collection, maintenance tasks DYMAFLEX manipulator characteristics 80 cm long 7 DOF with interchangeable end effectors 5 kg per arm 29 Space Systems Laboratory

30 Exo-SPHERES Assisting EVA Servicing 30 Space Systems Laboratory

31 DOSS Servicing Flight Demo Concept Dexterous Orbital Servicing by Smallsat Flight demonstration of servicing tasks Self-contained task board Autonomous and teleoperated task performance Proposed for AFOSR UNP-8 31 Space Systems Laboratory

32 SCAMP End-to-End Servicing Demo Smallsat Concept for Advanced Manipulation and Proxops Secondary launch on ESPA ring or Dragon Self-deploys two cubesats for rendezvous and docking targets Performs servicing tasks on surface-mounted task board NASA Edison proposal 32 Space Systems Laboratory

 >30 cm/sec max tip speed Nominal power 75 W 33 Space Systems")
33 Proteus Dexterous Servicing Manipulator Evolution of DYMAFLEX manipulator Human-scale manipulator 6 cm diameter 1 meter long Total mass 8 kg Interchangeable end effectors 80 N tip force (worst pose) >30 cm/sec max tip speed Nominal power 75 W 33 Space Systems Laboratory

34 A Sample Proteus Toolbox Modules Roll Actuator Pitch Actuator Pitch-Roll Actuator Long Arm Link Force-Torque Sensor Medium Link Pitch-Yaw Actuator Short Link 34 End Effectors Stereo Pan-Tilt Parallel Jaws High-Dexterity End Effector Handrail Gripper Nodes Mini-Node Free-Flight Module Base Node Space Systems Laboratory

35 A Potential Proteus Configuration Positioning Arm for Dexterous Manipulators Dexterous Arms and Interchangeable End Effectors for Servicing/Assembly Free-Flight Module/ Stand-Off Video Monitoring Source 35 Legs for Local Mobility and Stabilization Using EVA Hand Rails Space Systems Laboratory
36 Closing Thoughts The problem with space robotics is that it has developed its own mythology through the years If I say my program needs a robot, I ll have to pay for it There s no way a robot can do what an astronaut can To develop and fly a space robot, you have to have already developed and flown a space robot Highly capable (EVA-equivalent) space robots can be made compatible with ESPA secondary launch Small robots are lower in cost, and enable a business case to be made for single-target, expendable servicing missions 36 Space Systems Laboratory
37 More Closing Thoughts Highlander myth: There can be only one. Robots are not generalists; there are niches for a rich ecosystem of space robots Not every task is optimally performed by a humanoid Only one robot feature creep cost growth longer planned lifetime higher reliability cost growth... If humans will always be the most expensive element in space, use robots to make them as capable as possible The robotics field is vastly bigger than NASA, or even the U.S. players opportunity and peril 37 Space Systems Laboratory

38 For More Information 38 Space Systems Laboratory
NanoRacks/Quad-M Rideshare Overview. Michael D. Johnson 10/12/2016
 NanoRacks/Quad-M Rideshare Overview Michael D. Johnson 10/12/2016 Why NanoRacks/Quad-M Team? NRCSD Kaber Cygnus External Deployer NREP NR Airlock Dragon Trunk Deployer Centaur Aft Bulkhead Deployer Centaur
NanoRacks/Quad-M Rideshare Overview Michael D. Johnson 10/12/2016 Why NanoRacks/Quad-M Team? NRCSD Kaber Cygnus External Deployer NREP NR Airlock Dragon Trunk Deployer Centaur Aft Bulkhead Deployer Centaur
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
Focus is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations A vision and a challenge... 1 2012 David
Space Simulation MARYLAND U N I V E R S I T Y O F. Space Simulation. ENAE 483/788D - Principles of Space Systems Design
 Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Lecture #27 December 4, 2014 Focus of this lecture is on human-in-the-loop operational simulations, not component sims (e.g., thermal vacuum chambers) Microgravity Planetary surfaces Specialty simulations
Altair Constellation Returns Humans to the Moon
 Altair Cover Page Altair Constellation Returns Humans to the Moon Clinton Dorris Deputy Manager Altair Project Office Constellation EXPLORATION ROADMAP 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21
Altair Cover Page Altair Constellation Returns Humans to the Moon Clinton Dorris Deputy Manager Altair Project Office Constellation EXPLORATION ROADMAP 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21
Feasibility of Developing a Refrigerant-Based Propulsion System for Small Spacecraft
 Feasibility of Developing a Refrigerant-Based Propulsion System for Small Spacecraft Carl Seubert, et al. Small Satellite Conference August 14 th 2007 Outline Background Propulsion system requirements
Feasibility of Developing a Refrigerant-Based Propulsion System for Small Spacecraft Carl Seubert, et al. Small Satellite Conference August 14 th 2007 Outline Background Propulsion system requirements
EUROBOT END-EFFECTORS
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT END-EFFECTORS S.Michaud (1),
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT END-EFFECTORS S.Michaud (1),
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
Robot motion by simultaneously wheel and leg propulsion
 Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Tether-based Robot Locomotion Experiments in REX-J mission
 Tether-based Robot Locomotion Experiments in REX-J mission H. Nakanishi*, M. Yamazumi*, S. Karakama*, M. Oda*, S. Nishida****, H. Kato**, K. Watanabe*, A. Ueta**, M. Yoshii***, S. Suzuki*** *Tokyo Institute
Tether-based Robot Locomotion Experiments in REX-J mission H. Nakanishi*, M. Yamazumi*, S. Karakama*, M. Oda*, S. Nishida****, H. Kato**, K. Watanabe*, A. Ueta**, M. Yoshii***, S. Suzuki*** *Tokyo Institute
Next Generation Life Support (NGLS): Variable Oxygen Regulator Element
: Variable Oxygen Regulator Element") ABSTRACT The Variable Oxygen Regulator is a new technology to provide pressure control for the next generation space suit. Using a motor-driven actuator, this dual-stage regulator allows, for the first
ABSTRACT The Variable Oxygen Regulator is a new technology to provide pressure control for the next generation space suit. Using a motor-driven actuator, this dual-stage regulator allows, for the first
METNET Mission for Mars. MetNet. Atmospheric science network for Mars
 MetNet Atmospheric science network for Mars A.-M. Harri (1), R. Pellinen (1), V. Linkin (2), K. Pichkadze (3), M. Uspensky (1), T. Siili (1), A. Lipatov (2), H. Savijärvi (4), V. Vorontsov (3), J.Semenov
MetNet Atmospheric science network for Mars A.-M. Harri (1), R. Pellinen (1), V. Linkin (2), K. Pichkadze (3), M. Uspensky (1), T. Siili (1), A. Lipatov (2), H. Savijärvi (4), V. Vorontsov (3), J.Semenov
Introduction to Robotics for 3D Additive Construction
 Introduction to Robotics for 3D Additive Construction Brian Wilcox, Manager, Space Robotics Technology Jet Propulsion Laboratory, California Institute of Technology 24 Aug 20105 Robotics for 3D Additive
Introduction to Robotics for 3D Additive Construction Brian Wilcox, Manager, Space Robotics Technology Jet Propulsion Laboratory, California Institute of Technology 24 Aug 20105 Robotics for 3D Additive
Schilling Robotics TITAN 4 Manipulator
 PRODUCT DATASHEET SUBSEA TECHNOLOGIES Schilling Robotics TITAN 4 Manipulator We put you first. And keep you ahead. Thousands of our manipulator systems are in use worldwide every day. TITAN manipulators
PRODUCT DATASHEET SUBSEA TECHNOLOGIES Schilling Robotics TITAN 4 Manipulator We put you first. And keep you ahead. Thousands of our manipulator systems are in use worldwide every day. TITAN manipulators
Preliminary Cost Analysis MARYLAND. Cost Sources Vehicle-level Costing Heuristics Applications Learning Curves Program-Level Analysis
 Cost Sources Vehicle-level Costing Heuristics Applications Learning Curves Program-Level Analysis 2003 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Cost Analysis Direct Costs - directly
Cost Sources Vehicle-level Costing Heuristics Applications Learning Curves Program-Level Analysis 2003 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Cost Analysis Direct Costs - directly
Lesson: Airspeed Control
 11/20/2018 Airspeed Control Page 1 Lesson: Airspeed Control Objectives: o Knowledge o An understanding of the aerodynamics related to airspeed control o Skill o The ability to establish and maintain a
11/20/2018 Airspeed Control Page 1 Lesson: Airspeed Control Objectives: o Knowledge o An understanding of the aerodynamics related to airspeed control o Skill o The ability to establish and maintain a
Assessing Compliance with United States Government Orbital Debris Mitigation Guidelines
 Assessing Compliance with United States Government Orbital Debris Mitigation Guidelines R. L. Kelley 1, D. R. Jarkey 2 1. Jacobs, NASA Johnson Space Center, Houston, TX 77058, USA 2. HX5 - Jacobs JETS
Assessing Compliance with United States Government Orbital Debris Mitigation Guidelines R. L. Kelley 1, D. R. Jarkey 2 1. Jacobs, NASA Johnson Space Center, Houston, TX 77058, USA 2. HX5 - Jacobs JETS
IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell
 IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell Sasakawa International Center for Space Architecture (SICSA), University of Houston, USA e-mail: lbell@uh.edu
IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell Sasakawa International Center for Space Architecture (SICSA), University of Houston, USA e-mail: lbell@uh.edu
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV SYSTEM
 TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
Avionics System Project. Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili
 Avionics System Project Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili Link Budgets for Communication Communication needs during the mission are divided into distinct phases,
Avionics System Project Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili Link Budgets for Communication Communication needs during the mission are divided into distinct phases,
A Study on the End-Effector Exchange Mechanism of a Space Robot
 Journal of Mechanics Engineering and Automation 7 (2017) 278-284 doi: 10.17265/2159-5275/2017.05.005 D DAVID PUBLISHING A Study on the End-Effector Exchange Mechanism of a Space Robot Rui Qu 1, Yuto Takei
Journal of Mechanics Engineering and Automation 7 (2017) 278-284 doi: 10.17265/2159-5275/2017.05.005 D DAVID PUBLISHING A Study on the End-Effector Exchange Mechanism of a Space Robot Rui Qu 1, Yuto Takei
Human Factors and Habitability
 Human Factors and Habitability Discussion of Midterm Required Crew Volumes Human Physiological Adaptation to 0G Workstation Design Restraint Design Ideal Cabin Layout Habitability in Partial Gravity Stowage
Human Factors and Habitability Discussion of Midterm Required Crew Volumes Human Physiological Adaptation to 0G Workstation Design Restraint Design Ideal Cabin Layout Habitability in Partial Gravity Stowage
WARM GAS PROPULSION FOR SMALL SATELLITES. J. R. French Propulsion Development Associates, Inc. ~1AlN HOUSING CATALY5THOUSP.\G C AT.
 The purpose of this activity is to quickly develop miniature warm gas thruster technology for application to next generation micro satellite systems and to provide an industrial source for this technology.
The purpose of this activity is to quickly develop miniature warm gas thruster technology for application to next generation micro satellite systems and to provide an industrial source for this technology.
2017 LOCKHEED MARTIN CORPORATION. ALL RIGHTS RESERVED
 1 Lockheed Martin (LM) Space Systems Software Product Line Focused organization (LM1000) Deep Space Heritage Avionics/SW leveraged for LM1000 product line solution Combined Commercial and Civil Space Organizations
1 Lockheed Martin (LM) Space Systems Software Product Line Focused organization (LM1000) Deep Space Heritage Avionics/SW leveraged for LM1000 product line solution Combined Commercial and Civil Space Organizations
USA Space Debris Environment, Operations, and Policy Updates
 USA Space Debris Environment, Operations, and Policy Updates Presentation to the 49 th Session of the Scientific and Technical Subcommittee Committee on the Peaceful Uses of Outer Space United Nations
USA Space Debris Environment, Operations, and Policy Updates Presentation to the 49 th Session of the Scientific and Technical Subcommittee Committee on the Peaceful Uses of Outer Space United Nations
Kungl Tekniska Högskolan
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems
 Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se March 22, 2006 Outline Wheel The overall system layout : those found in nature found in nature Difficult to imitate technically Technical
Introduction to Habitability
 Introduction to Habitability Required Crew Volumes! Human Physiological Adaptation to 0G! Workstation Design! Restraint Design! Ideal Cabin Layout! Habitability in Partial Gravity! Stowage! Various Examples
Introduction to Habitability Required Crew Volumes! Human Physiological Adaptation to 0G! Workstation Design! Restraint Design! Ideal Cabin Layout! Habitability in Partial Gravity! Stowage! Various Examples
CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC SAILS
 CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC SAILS THE REASON? DISTANCE!!! CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC
CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC SAILS THE REASON? DISTANCE!!! CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC
Solar Sails for Exploration of the Interstellar Medium January 2015
 Solar Sails for Exploration of the Interstellar Medium January 2015 www.nasa.gov The Sails We Need* Size: 75,000 m 2 to 250,000 m 2 Areal density: ~ 1 gram/m 2 Able to survive close solar deployment (0.1
Solar Sails for Exploration of the Interstellar Medium January 2015 www.nasa.gov The Sails We Need* Size: 75,000 m 2 to 250,000 m 2 Areal density: ~ 1 gram/m 2 Able to survive close solar deployment (0.1
ROV Development ROV Function. ROV Crew Navigation IRATECH SUB SYSTEMS 2010
 IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
IR AT EC H SU B SY ST EM S 20 10 Remotely Operated Vehicle ROV INTRODUCTORY 2008 2008 1 KEY POINTS ROV Introductory ROV Development ROV Function Types of ROV ROV Crew Navigation ROV Components 2 ROV Development
WINDSWEPT & INTERESTING LTD
 Page 1 WINDSWEPT & INTERESTING LTD Portable Wind Power Page 2 Table of Contents Overview... 3 Off-Grid, On the Road... 3 Airborne Wind Energy Systems (AWES)... 3 A Network of Kites... 3 Background... 4
Page 1 WINDSWEPT & INTERESTING LTD Portable Wind Power Page 2 Table of Contents Overview... 3 Off-Grid, On the Road... 3 Airborne Wind Energy Systems (AWES)... 3 A Network of Kites... 3 Background... 4
Schilling Robotics ATLAS 7R Manipulator
 PRODUCT DATASHEET SUBSEA SYSTEMS Schilling Robotics ATLAS 7R Manipulator We put you first. And keep you ahead. The Subsea Industry relies on hundreds of Schilling Robotics manipulators every day. The ATLAS
PRODUCT DATASHEET SUBSEA SYSTEMS Schilling Robotics ATLAS 7R Manipulator We put you first. And keep you ahead. The Subsea Industry relies on hundreds of Schilling Robotics manipulators every day. The ATLAS
The Baltic Diver ROV-Services
 The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
The Baltic Diver ROV-Services Comanche ROV The Baltic Diver Comanche ROV is the ideal choice when seeking a Work Class Solution in a small package. Baltic Taucherei- und Bergungsbetrieb Rostock GmbH Main
UNPIGGABLE NO MORE! PRACTICAL SOLUTIONS FOR CHALLENGING PIPELINES
 UNPIGGABLE NO MORE! PRACTICAL SOLUTIONS FOR CHALLENGING PIPELINES Markus Ginten, Thomas Beuker, Tom Steinvoorte PPSA Seminar Aberdeen, 20 th November 2013 CONTENT 1. Evolutional Process 2. Managing Complexity
UNPIGGABLE NO MORE! PRACTICAL SOLUTIONS FOR CHALLENGING PIPELINES Markus Ginten, Thomas Beuker, Tom Steinvoorte PPSA Seminar Aberdeen, 20 th November 2013 CONTENT 1. Evolutional Process 2. Managing Complexity
Extravehicular Activity
 Lecture #24 November 21, 2017 Full pressure suits and high-altitude aviation Early human space program Operational suits Interfaces to habitats and rovers Spacesuit alternatives 1 2017 David L. Akin -
Lecture #24 November 21, 2017 Full pressure suits and high-altitude aviation Early human space program Operational suits Interfaces to habitats and rovers Spacesuit alternatives 1 2017 David L. Akin -
Flight Testing of a Low Cost De-Orbiting Device for Small Satellites
 Flight Testing of a Low Cost De-Orbiting Device for Small Satellites Dana Turse *, Phil Keller*, Robert Taylor*, Mark Reavis*, Mike Tupper*, Chris Koehler Abstract Use of small and very small spacecraft
Flight Testing of a Low Cost De-Orbiting Device for Small Satellites Dana Turse *, Phil Keller*, Robert Taylor*, Mark Reavis*, Mike Tupper*, Chris Koehler Abstract Use of small and very small spacecraft
Deep-Space Extravehicular Activity (EVA)
") National Aeronautics and Space Administration Deep-Space Extravehicular Activity (EVA) Briefing to the National Research Council Technical Panel March 27, 2013 Mike Hembree NASA Johnson Space Center Agenda
National Aeronautics and Space Administration Deep-Space Extravehicular Activity (EVA) Briefing to the National Research Council Technical Panel March 27, 2013 Mike Hembree NASA Johnson Space Center Agenda
Landsat 8's Emergency RMM
 Landsat 8's Emergency RMM A Quick-Turnaround Method Bob Scheid Landsat 8 Flight Operations KBRwyle Goddard Space Flight Center, MD November 5, 2016 Agenda Brief overview of Landsat s mission and command
Landsat 8's Emergency RMM A Quick-Turnaround Method Bob Scheid Landsat 8 Flight Operations KBRwyle Goddard Space Flight Center, MD November 5, 2016 Agenda Brief overview of Landsat s mission and command
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane
 Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
Proposal for a Design of a Autonomous Bridge-Mapping Hydroplane Group 2 Proposed for: 2.017 Design of Electromechanical Robotic Systems Professor Franz Hover Lab Instructor Harrison Chin September 29,
ISE Subsea Tools and Toolsleds
 1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
1734 Broadway St. Port Coquitlam, B.C. V3C 2M8, Canada +1.604.942.5223 +1.604.942.7577 info@ise.bc.ca www.ise.bc.ca ISE Subsea Tools and Toolsleds 1 INTRODUCTION The value of an ROV is increased by its
Probability Risk Assessment Methodology Usage on Space Robotics for Free Flyer Capture
 6 th IAASS International Space Safety Conference Probability Risk Assessment Methodology Usage on Space Robotics for Free Flyer Capture Oneil D silva Roger Kerrison Page 1 6 th IAASS International Space
6 th IAASS International Space Safety Conference Probability Risk Assessment Methodology Usage on Space Robotics for Free Flyer Capture Oneil D silva Roger Kerrison Page 1 6 th IAASS International Space
INNOVATIVE MOORING SYSTEMS
 INNOVATIVE MOORING SYSTEMS VESSEL AUTOMOORING MODULES QUAY AUTOMOORING INSTALLATIONS DOCKLOCK brings mooring to a next level PAGE 2 FOR OVER A CENTURY THE WORLD S LEADING EXPERT IN MOORING, BERTHING AND
INNOVATIVE MOORING SYSTEMS VESSEL AUTOMOORING MODULES QUAY AUTOMOORING INSTALLATIONS DOCKLOCK brings mooring to a next level PAGE 2 FOR OVER A CENTURY THE WORLD S LEADING EXPERT IN MOORING, BERTHING AND
Gripping rotary modules
 Gripping rotary modules Gripping rotary modules GRIPPING ROTARY MODULES Series Size Page Gripping rotary modules RP 314 RP 1212 318 RP 1216 322 RP 1520 326 RP 2120 330 RP 2128 334 RC 338 RC 1212 342 RC
Gripping rotary modules Gripping rotary modules GRIPPING ROTARY MODULES Series Size Page Gripping rotary modules RP 314 RP 1212 318 RP 1216 322 RP 1520 326 RP 2120 330 RP 2128 334 RC 338 RC 1212 342 RC
SSC15-II-6. payload), allowing a new class of larger deployable payloads to utilize the ISS as a research platform.
, allowing a new class of larger deployable payloads to utilize the ISS as a research platform.") SSC15-II-6 Paving the Way for Small Satellite Access to Orbit: Cyclops Deployment of SpinSat, the Largest Satellite ever Deployed from the International Space Station Matthew P. Hershey, Daniel R. Newswander,
SSC15-II-6 Paving the Way for Small Satellite Access to Orbit: Cyclops Deployment of SpinSat, the Largest Satellite ever Deployed from the International Space Station Matthew P. Hershey, Daniel R. Newswander,
ZSTT Team Description Paper for Humanoid size League of Robocup 2017
 Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
Adult- ZSTT Team Description Paper for Humanoid size League of Robocup 2017 Jaesik Jeong, Youngsup Oh and Jeehyun Yang ZSTT E-mail: soulmatree@gmail.com Web: www.soulmatree.com Abstract. This paper describes
NANO-LAUNCH REACTION CONTROL SYSTEM 25% Report
 EML 4905 Senior Design Project A B.S. THESIS PREPARED IN PARTIAL FULFILLMENT OF THE REQUIREMENT FOR THE DEGREE OF BACHELOR OF SCIENCE IN MECHANICAL ENGINEERING NANO-LAUNCH REACTION CONTROL SYSTEM 25% Report
EML 4905 Senior Design Project A B.S. THESIS PREPARED IN PARTIAL FULFILLMENT OF THE REQUIREMENT FOR THE DEGREE OF BACHELOR OF SCIENCE IN MECHANICAL ENGINEERING NANO-LAUNCH REACTION CONTROL SYSTEM 25% Report
A Dual-Chamber Hybrid Inflatable Suitlock (DCIS) for Planetary Surfaces or Deep Space
 for Planetary Surfaces or Deep Space") 41st International Conference on Environmental Systems 17-21 July 2011, Portland, Oregon AIAA 2011-5064 A Dual-Chamber Hybrid Inflatable Suitlock (DCIS) for Planetary Surfaces or Deep Space A. Scott Howe,
41st International Conference on Environmental Systems 17-21 July 2011, Portland, Oregon AIAA 2011-5064 A Dual-Chamber Hybrid Inflatable Suitlock (DCIS) for Planetary Surfaces or Deep Space A. Scott Howe,
Advantages of Heritage Atlas Systems for Human Spaceflight
 Advantages of Heritage Atlas Systems for Human Spaceflight Pollard, L. J. 1 and Tribbett, E. J. 2 United Launch Alliance, Littleton, CO, 80112 The current Atlas V launch vehicle has been developed through
Advantages of Heritage Atlas Systems for Human Spaceflight Pollard, L. J. 1 and Tribbett, E. J. 2 United Launch Alliance, Littleton, CO, 80112 The current Atlas V launch vehicle has been developed through
Team Members. Surrey Space Centre (SSC): Study lead, payloads, ADCS (with Prof. Bong Wie), SK platform, sail technologies
: Study lead, payloads, ADCS (with Prof. Bong Wie), SK platform, sail technologies") A Solar Kite Mission to Study the Earth's Magneto-tail Dr. Vaios Lappas C. Underwood, Luis M. Gomes, B. Wie C. McInnes, L. Tarabini, K. Wallace + 18th AIAA/USU Small Satellite Conference 18 AIAA/USU Small
A Solar Kite Mission to Study the Earth's Magneto-tail Dr. Vaios Lappas C. Underwood, Luis M. Gomes, B. Wie C. McInnes, L. Tarabini, K. Wallace + 18th AIAA/USU Small Satellite Conference 18 AIAA/USU Small
Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site
 Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site Prof. Richard Voyles Guangying Jiang Purdue University Collaborative Robotics Lab Purdue Robotics Accelerator U.S. DOE
Mock-up of the Exhaust Shaft Inspection by Dexterous Hexrotor at the DOE WIPP Site Prof. Richard Voyles Guangying Jiang Purdue University Collaborative Robotics Lab Purdue Robotics Accelerator U.S. DOE
Saab Seaeye Cougar XT Compact
 The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
Adaptation and Optimization of the RIT-µX miniaturized Ion Propulsion System for Small Satellites
 Adaptation and Optimization of the RIT-µX miniaturized Ion Propulsion System for Small Satellites Hans J. Leiter, Christian Altmann, Ralf Kukies and Jan-Patrick Porst 22 April 2015, Berlin (D) document
Adaptation and Optimization of the RIT-µX miniaturized Ion Propulsion System for Small Satellites Hans J. Leiter, Christian Altmann, Ralf Kukies and Jan-Patrick Porst 22 April 2015, Berlin (D) document
the world s most advanced humanoid robot
 the world s most advanced humanoid robot 02 : ASIMO V2 : TECHNICAL GUIDE : ROBOT DEVELOPMENT : CONTENTS ROBOT DEVELOPMENT 3 HISTORY OF HUMANOIDS 5 ASIMO v1 7 ASIMO v2 16 THE FUTURE 18 Creating New Mobility
the world s most advanced humanoid robot 02 : ASIMO V2 : TECHNICAL GUIDE : ROBOT DEVELOPMENT : CONTENTS ROBOT DEVELOPMENT 3 HISTORY OF HUMANOIDS 5 ASIMO v1 7 ASIMO v2 16 THE FUTURE 18 Creating New Mobility
Proof of concept of a Bio-Containment System for Mars Sample Return Mission
 Proof of concept of a Bio-Containment System for Mars Sample Return Mission S. Senese (I), P. Magnani (I), A. Fumagalli (I), M. Colomba (I) A. Pedrini (II), D. Indrigo (II), A. Terribile (II), R. Ferrario
Proof of concept of a Bio-Containment System for Mars Sample Return Mission S. Senese (I), P. Magnani (I), A. Fumagalli (I), M. Colomba (I) A. Pedrini (II), D. Indrigo (II), A. Terribile (II), R. Ferrario
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads
 Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads Carrick Detweiler, Stefan Sosnowski, Iuliu Vasilescu, and Daniela Rus Computer Science and Artificial Intelligence
Saving Energy with Buoyancy and Balance Control for Underwater Robots with Dynamic Payloads Carrick Detweiler, Stefan Sosnowski, Iuliu Vasilescu, and Daniela Rus Computer Science and Artificial Intelligence
Spring Locomotion Concepts. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
Spring 2016 Locomotion Concepts Locomotion Concepts 01.03.2016 1 Locomotion Concepts: Principles Found in Nature ASL Autonomous Systems Lab On ground Locomotion Concepts 01.03.2016 2 Locomotion Concepts
University of Maryland. Critical Design Review Page 1
 Critical Design Review Page 1 Critical Design Review Page 2 Configuration 1: Configuration 2: Configuration 3: Configuration 4: One Pod No Escape Two Pods No Escape One Pod Bailout System One Pod Propulsion
Critical Design Review Page 1 Critical Design Review Page 2 Configuration 1: Configuration 2: Configuration 3: Configuration 4: One Pod No Escape Two Pods No Escape One Pod Bailout System One Pod Propulsion
Our Company. Sail with us into calm waters! -
 Rudder Systems Our Company The company MM-Offshore GmbH is one of the major designing and producing ship s equipment supplier in the international shipbuilding market. With our experience of more than
Rudder Systems Our Company The company MM-Offshore GmbH is one of the major designing and producing ship s equipment supplier in the international shipbuilding market. With our experience of more than
Flight Systems Verification & Validation Mars 2020 Entry, Descent, and Landing
 Flight Systems Verification & Validation Mars 2020 Entry, Descent, and Landing Cj Giovingo Allen Chen, Mallory Lefland, Aaron Stehura, Gregory Villar International Planetary Probe Workshop June 12, 2018
Flight Systems Verification & Validation Mars 2020 Entry, Descent, and Landing Cj Giovingo Allen Chen, Mallory Lefland, Aaron Stehura, Gregory Villar International Planetary Probe Workshop June 12, 2018
RATE CONTROL SYSTEM FOR SOUNDING ROCKETS
 RATE CONTROL SYSTEM FOR SOUNDING ROCKETS Josef Ettl, Johann Pfänder German Aerospace Center (DLR), D-834 Wessling, Germany e-mail: josef.ettl@dlr.de johann.pfaender@dlr.de, 1. ABSTRACT DLR/Moraba has a
RATE CONTROL SYSTEM FOR SOUNDING ROCKETS Josef Ettl, Johann Pfänder German Aerospace Center (DLR), D-834 Wessling, Germany e-mail: josef.ettl@dlr.de johann.pfaender@dlr.de, 1. ABSTRACT DLR/Moraba has a
MPCS: Develop and Test As You Fly for MSL
 MPCS: Develop and Test As You Fly for MSL GSAW 2008 Michael Tankenson & Lloyd DeForrest Wednesday April 2, 2008 Copyright 2008 California Institute of Technology. Government sponsorship acknowledged. Mission
MPCS: Develop and Test As You Fly for MSL GSAW 2008 Michael Tankenson & Lloyd DeForrest Wednesday April 2, 2008 Copyright 2008 California Institute of Technology. Government sponsorship acknowledged. Mission
Wave Glider: Liege Colloquium. Colloquium April 27
 The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
The The Wave Wave Glider: Glider: Enabling Enabling aa New New Approach Approach to to Persistent Persistent Ocean Ocean Observation Observation and and Research Research nd Liege 42 42nd Liege Colloquium
Four forces on an airplane
 Four forces on an airplane By NASA.gov on 10.12.16 Word Count 824 Level MAX TOP: An airplane pictured on June 30, 2016. Courtesy of Pexels. BOTTOM: Four forces on an airplane. Courtesy of NASA. A force
Four forces on an airplane By NASA.gov on 10.12.16 Word Count 824 Level MAX TOP: An airplane pictured on June 30, 2016. Courtesy of Pexels. BOTTOM: Four forces on an airplane. Courtesy of NASA. A force
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test
 NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
NT09-21 Cruise Report SURUGA-BAY Cable Laying Experiment / VBCS Function Test December 2009 Table of Contents 1. Overview 2. Schedule 3. Dive Summary 4. Concluding Remarks 1. Overview A unique development
Water Reclamation MARYLAND. Fundamentals of water reclamation Water reclamation. Solids disposal. Potable Hygiene Urine U N I V E R S I T Y O F
 Fundamentals of water reclamation Water reclamation Potable Hygiene Urine Solids disposal 1 2011 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu ISS Consumables Budget Consumable Design
Fundamentals of water reclamation Water reclamation Potable Hygiene Urine Solids disposal 1 2011 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu ISS Consumables Budget Consumable Design
SPG. Application example. Pneumatic 2-Finger Parallel Gripper Heavy-load Gripper. Weight 35 kg. Stroke per finger 100 mm.
 SPG Size 100 Weight 35 kg 10,000 N Stroke per finger 100 mm Workpiece weight 50 kg Application example Gripper unit for heavy V8 engine blocks. SPG 100 2-Finger Heavy-load Gripper 446 www.schunk.com SPG
SPG Size 100 Weight 35 kg 10,000 N Stroke per finger 100 mm Workpiece weight 50 kg Application example Gripper unit for heavy V8 engine blocks. SPG 100 2-Finger Heavy-load Gripper 446 www.schunk.com SPG
Cost effective. Smooth. Reliable. LOG Internal Hole Gripper
 LOG Cost effective. Smooth. Reliable. LOG Internal Hole Gripper Light gripper made of very resistant polyamide with closed diaphragm system Field of Application Particularly suited to highly dynamic applications
LOG Cost effective. Smooth. Reliable. LOG Internal Hole Gripper Light gripper made of very resistant polyamide with closed diaphragm system Field of Application Particularly suited to highly dynamic applications
ME 8843-Advanced Mechatronics. Project Proposal-Automatic Bike Transmission
 ME 8843-Advanced Mechatronics Project Proposal-Automatic Bike Transmission 1/21/09 Razid Ahmad Brandon Borm Todd Sifleet Project Proposal: Our goal for the semester long project is to create and automatic
ME 8843-Advanced Mechatronics Project Proposal-Automatic Bike Transmission 1/21/09 Razid Ahmad Brandon Borm Todd Sifleet Project Proposal: Our goal for the semester long project is to create and automatic
ASCENDERS ASCENDERS RUN UP THE WALL WITH 600 POUNDS ON THE LINE APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER
 APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER PN: AK-APA5 ELIMINATE THE CHALLENGE OF VERTICAL OBSTACLES Lightweight and powerful, the Atlas Devices APA-5 is a multi-mission
APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER PN: AK-APA5 ELIMINATE THE CHALLENGE OF VERTICAL OBSTACLES Lightweight and powerful, the Atlas Devices APA-5 is a multi-mission
unsignalized signalized isolated coordinated Intersections roundabouts Highway Capacity Manual level of service control delay
 Whether unsignalized or signalized, isolated or coordinated, you can use TransModeler to simulate intersections with greater detail and accuracy than any other microsimulation software. TransModeler allows
Whether unsignalized or signalized, isolated or coordinated, you can use TransModeler to simulate intersections with greater detail and accuracy than any other microsimulation software. TransModeler allows
TITAN 4. The Industry Standard for Seven-Function Dexterous Manipulators
 TITAN 4 Manipulator Systems The Industry Standard for Seven-Function Dexterous Manipulators Hundreds of TITAN 4 manipulator systems are in use worldwide every day. TITAN manipulators are the highest quality
TITAN 4 Manipulator Systems The Industry Standard for Seven-Function Dexterous Manipulators Hundreds of TITAN 4 manipulator systems are in use worldwide every day. TITAN manipulators are the highest quality
Neutral Buoyancy Laboratory: Astronauts from the Pool to Spacewalks Kurt Otten, BSEE
 Denver, CO October 18-20, 2017 Neutral Buoyancy Laboratory: Astronauts from the Pool to Spacewalks Kurt Otten, BSEE Kurt Otten is the Operations Manager for NASA s Neutral Buoyancy Laboratory (NBL) in
Denver, CO October 18-20, 2017 Neutral Buoyancy Laboratory: Astronauts from the Pool to Spacewalks Kurt Otten, BSEE Kurt Otten is the Operations Manager for NASA s Neutral Buoyancy Laboratory (NBL) in
Spider Robot for Motion with Quasistatic. Force Constraints
 Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
Spider Robot for Motion with Quasistatic Force Constraints Shraga Shoval, Elon Rimon and Amir Shapira Technion - Israel Institute of Technology - Haifa, Israel 32000. Abstract In quasistatic motions the
ESAIL D45.1 Final Report of Remote Unit Gas Thruster
 D45.1 Final Report of Remote Unit Gas Thruster Work Package: WP 45 Version: Version 1.2 Prepared by: NanoSpace AB, Kristoffer Palmer, Tor-Arne Grönland Time: Uppsala, November 8 th, 2013 Coordinating person:
D45.1 Final Report of Remote Unit Gas Thruster Work Package: WP 45 Version: Version 1.2 Prepared by: NanoSpace AB, Kristoffer Palmer, Tor-Arne Grönland Time: Uppsala, November 8 th, 2013 Coordinating person:
CubeSat Balloon Drag Devices: Meeting the 25-Year De-Orbit Requirement
 CubeSat Balloon Drag Devices: Meeting the 25-Year De-Orbit Requirement Jerry K. Fuller, David Hinkley, and Siegfried W. Janson The Aerospace Corporation Physical Science Laboratories August, 2010 The Aerospace
CubeSat Balloon Drag Devices: Meeting the 25-Year De-Orbit Requirement Jerry K. Fuller, David Hinkley, and Siegfried W. Janson The Aerospace Corporation Physical Science Laboratories August, 2010 The Aerospace
WATER ROCK. Lawndart The rocket goes straight up and comes down nose first at high speed. Disadvantages
 Water Rocket Recovery Index What is a recovery system? A recovery system is a feature of a rocket that allows it to come back to Earth with minimal damage. Introduction This guide is intended to serve
Water Rocket Recovery Index What is a recovery system? A recovery system is a feature of a rocket that allows it to come back to Earth with minimal damage. Introduction This guide is intended to serve
MPG-plus. Application example. Pneumatic 2-Finger Parallel Gripper Gripper for small components. Gripping force 38 N 175 N. Sizes
 MPG-plus Sizes 25 40 Weight 0.06 kg 0.24 kg Gripping force 38 N 175 N Stroke per finger 3 mm 6 mm Workpiece weight 0.19 kg 0.7 kg Application example Pneumatically driven, dual-axis pick-and-place machine
MPG-plus Sizes 25 40 Weight 0.06 kg 0.24 kg Gripping force 38 N 175 N Stroke per finger 3 mm 6 mm Workpiece weight 0.19 kg 0.7 kg Application example Pneumatically driven, dual-axis pick-and-place machine
Distributed Control Systems
 Unit 41: Unit code Distributed Control Systems M/615/1509 Unit level 5 Credit value 15 Introduction With increased complexity and greater emphasis on cost control and environmental issues, the efficient
Unit 41: Unit code Distributed Control Systems M/615/1509 Unit level 5 Credit value 15 Introduction With increased complexity and greater emphasis on cost control and environmental issues, the efficient
Product Information. Gripper for small components MPC
 Product Information MPC MPC Easy. Economical. Cost-effective. MPC Easily built up 2-finger parallel gripper with good price-performance ratio Field of application Gripping of small to mid-sized workpieces
Product Information MPC MPC Easy. Economical. Cost-effective. MPC Easily built up 2-finger parallel gripper with good price-performance ratio Field of application Gripping of small to mid-sized workpieces
Gripping modules Pneumatic 2-finger parallel gripper Long-stroke gripper for small components Gripping force 120 N..
 GM Sizes 85.. 205 Mass 0.48 kg.. 2.7 kg 120 N.. 595 N Stroke per finger 16 mm.. 30 mm Workpiece weight, force-fit gripping Up to 2.3 kg Application example 3 5 3 4 2 5 2 1 1 Pneumatic double pick & place
GM Sizes 85.. 205 Mass 0.48 kg.. 2.7 kg 120 N.. 595 N Stroke per finger 16 mm.. 30 mm Workpiece weight, force-fit gripping Up to 2.3 kg Application example 3 5 3 4 2 5 2 1 1 Pneumatic double pick & place
A Method for Accurate Ballasting of an Autonomous Underwater Vehicle Robert Chavez 1, Brett Hobson 2, Ben Ranaan 2
 A Method for Accurate Ballasting of an Autonomous Underwater Vehicle Robert Chavez 1, Brett Hobson 2, Ben Ranaan 2 1 University of California, Irvine 2 Monterey Bay Aquarium Research Institute Abstract
A Method for Accurate Ballasting of an Autonomous Underwater Vehicle Robert Chavez 1, Brett Hobson 2, Ben Ranaan 2 1 University of California, Irvine 2 Monterey Bay Aquarium Research Institute Abstract
Servo-Assisted Lower-Body Exoskeleton With a True Running Gait
 Servo-Assisted Lower-Body Exoskeleton With a True Running Gait John Dick and Bruce Crapuchettes Applied Motion, Inc. 935 N. Indian Hill Blvd. Claremont, CA 91711 jdick@springwalker.com DARPA Workshop on
Servo-Assisted Lower-Body Exoskeleton With a True Running Gait John Dick and Bruce Crapuchettes Applied Motion, Inc. 935 N. Indian Hill Blvd. Claremont, CA 91711 jdick@springwalker.com DARPA Workshop on
A Low Power Approach to Small Satellite Propulsion
 A Low Power Approach to Small Satellite Propulsion Joe Cardin Director of Engineering VACCO Industries 0350 Vacco Street, South El Monte, CA 9733 JCardin@VACCOcom (626) 450-6435 Larry E Mosher Senior Professional
A Low Power Approach to Small Satellite Propulsion Joe Cardin Director of Engineering VACCO Industries 0350 Vacco Street, South El Monte, CA 9733 JCardin@VACCOcom (626) 450-6435 Larry E Mosher Senior Professional
IMPROVED XENON LOADING EQUIPMENT WITH LOADING CAPACITY UP TO 1200 KG FOR ALPHABUS
 IMPROVED XENON LOADING EQUIPMENT WITH LOADING CAPACITY UP TO 1200 KG FOR ALPHABUS Patrick BRAVAIS, Roland SALOME +, Cécile GELAS + * AIR LIQUIDE DTA + CNES Toulouse Abstract Plasmic propulsion systems
IMPROVED XENON LOADING EQUIPMENT WITH LOADING CAPACITY UP TO 1200 KG FOR ALPHABUS Patrick BRAVAIS, Roland SALOME +, Cécile GELAS + * AIR LIQUIDE DTA + CNES Toulouse Abstract Plasmic propulsion systems
Simulation of the Hybtor Robot
 Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
Simulation of the Hybtor Robot Pekka Aarnio, Kari Koskinen and Sami Salmi Information and Computer Systems in Automation Helsinki University of Technology ABSTRACT A dynamic rigid body simulation model
S.C.R.A.T. EXPERIMENT: A STUDENT EXPERIENCE
 CISAS G. Colombo, University of PADOVA, Via Venezia 15, 35131 Padova (ITALY) S.C.R.A.T. EXPERIMENT: A STUDENT EXPERIENCE 1st Symposium on Space Educational Activities Padova, 10th December 2015 Matteo
CISAS G. Colombo, University of PADOVA, Via Venezia 15, 35131 Padova (ITALY) S.C.R.A.T. EXPERIMENT: A STUDENT EXPERIENCE 1st Symposium on Space Educational Activities Padova, 10th December 2015 Matteo
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
Skippy: Reaching for the Performance Envelope
 Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Workshop on Dynamic Locomotion and Manipulation ETH Zürich, July 2016 Skippy: Reaching for the Performance Envelope Roy Featherstone 2016 Roy Featherstone What is Skippy? a hopping and balancing machine
Test Flights of the Revised ULDB Design
 Test Flights of the Revised ULDB Design Michael S. Smith * Aerostar International, Inc., Sulphur Springs, TX 75482, USA Henry M. Cathey, Jr. Physical Science Laboratory, New Mexico State University, Wallops
Test Flights of the Revised ULDB Design Michael S. Smith * Aerostar International, Inc., Sulphur Springs, TX 75482, USA Henry M. Cathey, Jr. Physical Science Laboratory, New Mexico State University, Wallops
Valve test benches. Systems overview
 Valve test benches Systems overview About us In the past few years WIKA has successfully integrated renowned manufacturers of calibration equipment into the group. With these established brands within
Valve test benches Systems overview About us In the past few years WIKA has successfully integrated renowned manufacturers of calibration equipment into the group. With these established brands within
The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300. Wolfgang Burnside
 The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300 Wolfgang Burnside TRV-005 Series: Standard Features and Benefits Frame The TRV 005 Series
The TRV series has sufficient thrust to allow operations in currents up to 3 knots and down to depths of 3,300 Wolfgang Burnside TRV-005 Series: Standard Features and Benefits Frame The TRV 005 Series
Live Round Interrupter (LRI) Technical Implementation White Paper
 Technical Implementation White Paper") Live Round Interrupter (LRI) Technical Implementation White Paper BlankSafe Inc Authors: Craig Lathrop and Wes Inskeep Jul 29th 2014 ABSTRACT This white paper discusses the Live Round Interrupter (LRI),
Live Round Interrupter (LRI) Technical Implementation White Paper BlankSafe Inc Authors: Craig Lathrop and Wes Inskeep Jul 29th 2014 ABSTRACT This white paper discusses the Live Round Interrupter (LRI),
Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL.
 Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL www.humphree.com WHEN EFFICIENCY AND PERFORMANCE REALLY MATTERS! Humphree proudly presents the new HCS-5 The HCS-5 combines exceptional mechanical
Trim and Stabilisation systems NEXT GENERATION IN BOAT CONTROL www.humphree.com WHEN EFFICIENCY AND PERFORMANCE REALLY MATTERS! Humphree proudly presents the new HCS-5 The HCS-5 combines exceptional mechanical
wind wobble unstable
 Rocket Stability During the flight of a model rocket, gusts of wind or thrust instabilities, can cause the rocket to "wobble", or change its attitude in flight. Poorly built or designed rockets can also
Rocket Stability During the flight of a model rocket, gusts of wind or thrust instabilities, can cause the rocket to "wobble", or change its attitude in flight. Poorly built or designed rockets can also
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS
 SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
SODV - PAC REACTION PAPER SUBSEA VISUALIZATION SYSTEMS Prepared by David Christie for PAC Past and Future The predominant and essential requirement of subsea visualization in support of drilling operations
Project to Refine a Prototype Unmanned, Tethered ADCP Platform for Measuring Streamflow
 Pagina 1 di 5 Project to Refine a Prototype Unmanned, Tethered ADCP Platform for Measuring Streamflow The use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement
Pagina 1 di 5 Project to Refine a Prototype Unmanned, Tethered ADCP Platform for Measuring Streamflow The use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement
Dynamic Positioning Control Augmentation for Jack-up Vessels
 DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Design and Control Session Dynamic Positioning Control Augmentation for Jack-up Vessels By Bradley Deghuee L-3 Communications 1 Introduction Specialized
Lessons learnt. Vega Workshop VEGA. Stefano BIANCHI ASI Headquarters, April 1st Stefano Bianchi Vega Programme Manager Slide 1
 VEGA Lessons learnt Vega Workshop Stefano BIANCHI ASI Headquarters, April 1st 2015 ESA UNCLASSIFIED For Official Use Stefano Bianchi Vega Programme Manager Slide 1 VEGA within the European Launchers family
VEGA Lessons learnt Vega Workshop Stefano BIANCHI ASI Headquarters, April 1st 2015 ESA UNCLASSIFIED For Official Use Stefano Bianchi Vega Programme Manager Slide 1 VEGA within the European Launchers family