NanoRacks/Quad-M Rideshare Overview. Michael D. Johnson 10/12/2016
|
|
|
- Abel Ramsey
- 6 years ago
- Views:
Transcription

1 NanoRacks/Quad-M Rideshare Overview Michael D. Johnson 10/12/2016
2 Why NanoRacks/Quad-M Team? NRCSD Kaber Cygnus External Deployer NREP NR Airlock Dragon Trunk Deployer Centaur Aft Bulkhead Deployer Centaur MegaDeployer Rideshare Overview 2
3 Why NanoRacks/Quad-M Team? NanoRacks is a leader in providing commercial space access solutions Over 375 payloads delivered to the ISS Most successful CubeSat program with 139 deployed to date Quad-M built and NanoRacks operates rideshare hardware on the ISS Multiple ISS flight opportunities per year NanoRacks/Quad-M has a signed MOU with ULA to develop a rideshare deployer system that can support over 1 metric ton to different orbits 3
4 Trusted Relationship with the ISS Program Dedicated NASA personnel that work with us (including some based in NanoRacks headquarters) NanoRacks directly interfaces with the ISS program on behalf of the customer Access to on orbit resources and all ISS Visiting Vehicle flights (SpaceX/Orbital/SNV/HTV/Progress/Soyuz) via a NASA Space Act Agreement Recently signed a new Space Act Agreement to build and deploy a commercial airlock on the ISS that will provide flexibility and enhanced satellite launch capabilities (ESPA class) 4





5 NanoRacks CubeSat Deployer (NRCSD) 1. NRCSDs transported in CTBs 2. Launched by ISS visiting vehicle 3. NRCSDs installed by ISS Crew 4. JEM Air Lock depress & slide table extension 5. Grapple by JRMS 6. NRCSDs positioned by JRMS 7. Deploy 8. JRMS return to slide table; Slide table retracts into JEM air lock 9. ISS Crew uninstall first 8 NRCSDs; repeat install/deploy for second set of NRCSDs 5


")


6 NRCSD Capabilities 51.6 degree inclination, KM Orbit lifetime 6-12 months Deployment typically 1-3 months after berthing Soft stowage internal ride several times per year Each NRCSD can deploy up to 6U of CubeSats 8 NRCSD s per airlock cycle, for a total of 48U deployment capability ~2 Air Lock cycles per mission Concept to flight hardware- 92 days Scheduling (L-/+ months) L-9 Initial data call L-3 Safety Review L-1.5 Customer delivery L-1 NanoRacks deliver to NASA L+1.5 Deployment (typical) NanoRacks Requirements Battery flight acceptance test Electrical: 3 inhibits minimum Customer responsible for spectrum & remote sensing licensing Fault-tolerance for deployables Non/low toxicity materials Secondary locking features NRCSD Double Wide 6





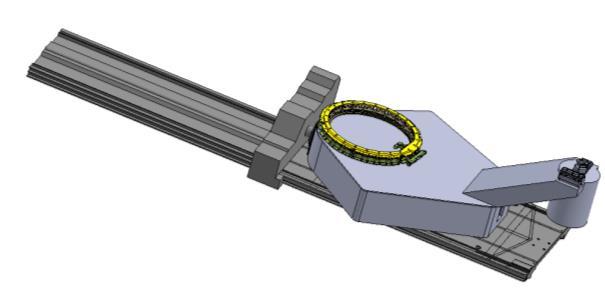
7 Kaber 1. SmallSats transported in CTBs 2. Launched by ISS visiting vehicle 3. Sats installed on Kaber by ISS Crew 4. JEM Air Lock depress & slide table extension 5. Grapple by SPDM 6. Kaber positioned by SPDM/Deployed 7. SPDM return to slide table; Slide table retracts into JEM air lock 8. Kaber returned inside 7


 Compatible with Lightband electrical interface Provides satellite with tunable")


8 Kaber Capabilities NanoRacks Kaber Microsatellite Deployment Service Kaber Generation 2 Service, up to 100Kg Payload Envelope Easily Accommodates > 24U Form Factor Kaber is currently on-orbit ISS SPDM Interface and Deployment Commanding NanoRacks Separation System (NRSS) Designed and Built by NanoRacks/Quad-M Cost Effective Alternative to Motorized Lightband Separation System Compatible with LightBand Satellite Bolt Pattern (8, 11.47, 13,15 ) Compatible with Lightband electrical interface Provides satellite with tunable separation velocity Built to Customer Specifications for each mission 3 point, ultra low-shock separation system Variable number of separation springs for fine thruster vector tuning Unitary release mechanism Release actuated by a Hold Down Release Mechanism (HDRM) by Sierra Nevada COTS, high reliability, flight heritage Tip-Off target performance < 2deg/sec Length cm Width cm Height cm Length cm Width cm Height cm 8 8






9 Cygnus External Deployer 1. SmallSats loaded into Deployer 2. Launched by Cygnus on Atlas V/Antares 3. Cygnus Docks to ISS 4. Cygnus Departs from ISS/ Orbit Raise to 450 km 5. Deploy 6. Cygnus destructive reentry 9

10 Cygnus External Deployer Capabilities Standard 6U deep 2 x 3 Deployers 36 U Total ISI-POD Format Compatible with P-POD Format 10


11 NanoRacks External Platform (NREP) 1. NREP Payloads transported in CTBs Five Powered 4 x 1 U Four Unpowered 4 x 1 U 2. Launched by ISS visiting vehicle 3. NREP configured by ISS Crew 4. JEM Air Lock depress & slide table extension 5. Grapple by JRMS 6. NREP installed by JRMS 7. 6 Month Dwell 8. JRMS return to slide table; Slide table retracts into JEM air lock 9. ISS Crew reconfigured NREP for next sortie 11


12 NREP Capabilities NREP Payloads Capability Five Powered 4 x 1 U Up to 150 W 28VDC Standard Service Up to VDC possible WiFi Data (~8 Mbps) Four Unpowered 4 x 1 U Typical 6 month exposure -VV/Nadir Facing Payload return possible via Dragon/Soyuz/Dream Chaser Future NREP Expansion Capability 12



 On-orbit late")

13 NanoRacks Airlock 5 Times the Volume of JEM Airlock Up to 1 MT Deployment Capability 2m diameter x 1.5 m possible Can Berth on POA 6 External Payload Locations (~ 5 kw/t100 available) On-orbit late 2018 Massive CubeSat Deployment Capacity 4 JEM Slide Tables in NR Airlock 13



")






14 Dragon Trunk Deployer Berth Dragon at ISS Temp Stow on NREP (if required) Remove Deployer from Trunk Launch in Trunk Return Deployer to Earth Return Deployer to ISS Deploy Satellite 14



15 Dragon Trunk Deployer Capabilities SPDM Robotic Interface Satellite Separation System (Lightband Like) Deployer Base 160 kg NREP Attach Mechanism Toxic Propellants OK Large Batteries OK Flammable Materials OK SPDM Operating Volume Satellite Volume Dragon Holdown Separation Nuts JEM Slide Table Interface 15

16 Centaur Aft Bulkhead Deployer Toxic Propellants OK Large Batteries OK Flammable Materials OK Based on Cygnus External 27U Capability Meets Do No Harm 16

17 Centaur MegaDeployer Toxic Propellants OK Large Batteries OK Flammable Materials OK Based on Cygnus External 54U x 8 = 432U Capability Up to kg Small Sats Meets Do No Harm 17
Robotic On-Orbit Satellite Servicing: One Size Does Not Fit All
 Robotic On-Orbit Satellite Servicing: One Size Does Not Fit All Dr. David L. Akin Dr. Craig R. Carignan Space Systems Laboratory On-Orbit Servicing Demand by Types Reboost Inspection Dexterous Servicing
Robotic On-Orbit Satellite Servicing: One Size Does Not Fit All Dr. David L. Akin Dr. Craig R. Carignan Space Systems Laboratory On-Orbit Servicing Demand by Types Reboost Inspection Dexterous Servicing
Assessing Compliance with United States Government Orbital Debris Mitigation Guidelines
 Assessing Compliance with United States Government Orbital Debris Mitigation Guidelines R. L. Kelley 1, D. R. Jarkey 2 1. Jacobs, NASA Johnson Space Center, Houston, TX 77058, USA 2. HX5 - Jacobs JETS
Assessing Compliance with United States Government Orbital Debris Mitigation Guidelines R. L. Kelley 1, D. R. Jarkey 2 1. Jacobs, NASA Johnson Space Center, Houston, TX 77058, USA 2. HX5 - Jacobs JETS
SSC15-II-6. payload), allowing a new class of larger deployable payloads to utilize the ISS as a research platform.
, allowing a new class of larger deployable payloads to utilize the ISS as a research platform.") SSC15-II-6 Paving the Way for Small Satellite Access to Orbit: Cyclops Deployment of SpinSat, the Largest Satellite ever Deployed from the International Space Station Matthew P. Hershey, Daniel R. Newswander,
SSC15-II-6 Paving the Way for Small Satellite Access to Orbit: Cyclops Deployment of SpinSat, the Largest Satellite ever Deployed from the International Space Station Matthew P. Hershey, Daniel R. Newswander,
Altair Constellation Returns Humans to the Moon
 Altair Cover Page Altair Constellation Returns Humans to the Moon Clinton Dorris Deputy Manager Altair Project Office Constellation EXPLORATION ROADMAP 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21
Altair Cover Page Altair Constellation Returns Humans to the Moon Clinton Dorris Deputy Manager Altair Project Office Constellation EXPLORATION ROADMAP 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21
Probability Risk Assessment Methodology Usage on Space Robotics for Free Flyer Capture
 6 th IAASS International Space Safety Conference Probability Risk Assessment Methodology Usage on Space Robotics for Free Flyer Capture Oneil D silva Roger Kerrison Page 1 6 th IAASS International Space
6 th IAASS International Space Safety Conference Probability Risk Assessment Methodology Usage on Space Robotics for Free Flyer Capture Oneil D silva Roger Kerrison Page 1 6 th IAASS International Space
USA Space Debris Environment, Operations, and Policy Updates
 USA Space Debris Environment, Operations, and Policy Updates Presentation to the 49 th Session of the Scientific and Technical Subcommittee Committee on the Peaceful Uses of Outer Space United Nations
USA Space Debris Environment, Operations, and Policy Updates Presentation to the 49 th Session of the Scientific and Technical Subcommittee Committee on the Peaceful Uses of Outer Space United Nations
Flight Testing of a Low Cost De-Orbiting Device for Small Satellites
 Flight Testing of a Low Cost De-Orbiting Device for Small Satellites Dana Turse *, Phil Keller*, Robert Taylor*, Mark Reavis*, Mike Tupper*, Chris Koehler Abstract Use of small and very small spacecraft
Flight Testing of a Low Cost De-Orbiting Device for Small Satellites Dana Turse *, Phil Keller*, Robert Taylor*, Mark Reavis*, Mike Tupper*, Chris Koehler Abstract Use of small and very small spacecraft
Next Generation Life Support (NGLS): Variable Oxygen Regulator Element
: Variable Oxygen Regulator Element") ABSTRACT The Variable Oxygen Regulator is a new technology to provide pressure control for the next generation space suit. Using a motor-driven actuator, this dual-stage regulator allows, for the first
ABSTRACT The Variable Oxygen Regulator is a new technology to provide pressure control for the next generation space suit. Using a motor-driven actuator, this dual-stage regulator allows, for the first
Japanese Experiment Module ( JEM)
") The Space Congress Proceedings 1986 (23rd) Developing Space For Tomorrow's Society Apr 1st, 8:00 AM Japanese Experiment Module ( JEM) Takehiko Kato Japan Liaison for Space Station Program National Space
The Space Congress Proceedings 1986 (23rd) Developing Space For Tomorrow's Society Apr 1st, 8:00 AM Japanese Experiment Module ( JEM) Takehiko Kato Japan Liaison for Space Station Program National Space
Lessons learnt. Vega Workshop VEGA. Stefano BIANCHI ASI Headquarters, April 1st Stefano Bianchi Vega Programme Manager Slide 1
 VEGA Lessons learnt Vega Workshop Stefano BIANCHI ASI Headquarters, April 1st 2015 ESA UNCLASSIFIED For Official Use Stefano Bianchi Vega Programme Manager Slide 1 VEGA within the European Launchers family
VEGA Lessons learnt Vega Workshop Stefano BIANCHI ASI Headquarters, April 1st 2015 ESA UNCLASSIFIED For Official Use Stefano Bianchi Vega Programme Manager Slide 1 VEGA within the European Launchers family
IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell
 IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell Sasakawa International Center for Space Architecture (SICSA), University of Houston, USA e-mail: lbell@uh.edu
IAC-06-D4.1.2 CORRELATIONS BETWEEN CEV AND PLANETARY SURFACE SYSTEMS ARCHITECTURE PLANNING Larry Bell Sasakawa International Center for Space Architecture (SICSA), University of Houston, USA e-mail: lbell@uh.edu
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV SYSTEM
 TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
TECHNICAL SPECIFICATION SCHILLING UHD III WORK CLASS ROV ROVOP, Silvertrees Drive, Westhill, Aberdeen AB32 6BH, Scotland, UK T +44 (0) 1224 472565 E rov@rovop.com www.rovop.com TECHNICAL SPECIFICATION
Smallsats by the Numbers
 Smallsats by the Numbers 2019 Internal use only - Proprietary 0 Overview Introduction Smallsat Applications Recent Events and Trends The Big Picture of Smallsats Commercial Smallsats Government Smallsats
Smallsats by the Numbers 2019 Internal use only - Proprietary 0 Overview Introduction Smallsat Applications Recent Events and Trends The Big Picture of Smallsats Commercial Smallsats Government Smallsats
Human Factors and Habitability
 Human Factors and Habitability Discussion of Midterm Required Crew Volumes Human Physiological Adaptation to 0G Workstation Design Restraint Design Ideal Cabin Layout Habitability in Partial Gravity Stowage
Human Factors and Habitability Discussion of Midterm Required Crew Volumes Human Physiological Adaptation to 0G Workstation Design Restraint Design Ideal Cabin Layout Habitability in Partial Gravity Stowage
A Study on the End-Effector Exchange Mechanism of a Space Robot
 Journal of Mechanics Engineering and Automation 7 (2017) 278-284 doi: 10.17265/2159-5275/2017.05.005 D DAVID PUBLISHING A Study on the End-Effector Exchange Mechanism of a Space Robot Rui Qu 1, Yuto Takei
Journal of Mechanics Engineering and Automation 7 (2017) 278-284 doi: 10.17265/2159-5275/2017.05.005 D DAVID PUBLISHING A Study on the End-Effector Exchange Mechanism of a Space Robot Rui Qu 1, Yuto Takei
Advantages of Heritage Atlas Systems for Human Spaceflight
 Advantages of Heritage Atlas Systems for Human Spaceflight Pollard, L. J. 1 and Tribbett, E. J. 2 United Launch Alliance, Littleton, CO, 80112 The current Atlas V launch vehicle has been developed through
Advantages of Heritage Atlas Systems for Human Spaceflight Pollard, L. J. 1 and Tribbett, E. J. 2 United Launch Alliance, Littleton, CO, 80112 The current Atlas V launch vehicle has been developed through
METNET Mission for Mars. MetNet. Atmospheric science network for Mars
 MetNet Atmospheric science network for Mars A.-M. Harri (1), R. Pellinen (1), V. Linkin (2), K. Pichkadze (3), M. Uspensky (1), T. Siili (1), A. Lipatov (2), H. Savijärvi (4), V. Vorontsov (3), J.Semenov
MetNet Atmospheric science network for Mars A.-M. Harri (1), R. Pellinen (1), V. Linkin (2), K. Pichkadze (3), M. Uspensky (1), T. Siili (1), A. Lipatov (2), H. Savijärvi (4), V. Vorontsov (3), J.Semenov
Schilling Robotics TITAN 4 Manipulator
 PRODUCT DATASHEET SUBSEA TECHNOLOGIES Schilling Robotics TITAN 4 Manipulator We put you first. And keep you ahead. Thousands of our manipulator systems are in use worldwide every day. TITAN manipulators
PRODUCT DATASHEET SUBSEA TECHNOLOGIES Schilling Robotics TITAN 4 Manipulator We put you first. And keep you ahead. Thousands of our manipulator systems are in use worldwide every day. TITAN manipulators
Feasibility of Developing a Refrigerant-Based Propulsion System for Small Spacecraft
 Feasibility of Developing a Refrigerant-Based Propulsion System for Small Spacecraft Carl Seubert, et al. Small Satellite Conference August 14 th 2007 Outline Background Propulsion system requirements
Feasibility of Developing a Refrigerant-Based Propulsion System for Small Spacecraft Carl Seubert, et al. Small Satellite Conference August 14 th 2007 Outline Background Propulsion system requirements
Loads, Structures, and Mechanisms. Team C5 Matthew Marcus Chris O'Hare Alex Slafkosky Scott Wingate
 Loads, Structures, and Mechanisms Matthew Marcus Chris O'Hare Alex Slafkosky Scott Wingate Presentation Overview Design requirements Initial crew capsule design choice Pressure vessel design Pressure loads
Loads, Structures, and Mechanisms Matthew Marcus Chris O'Hare Alex Slafkosky Scott Wingate Presentation Overview Design requirements Initial crew capsule design choice Pressure vessel design Pressure loads
Presentation Contents
 OTOS Presentation Contents Mission Requirements Mission Operations Architecture Design Reference Missions Habitat Configuration CONOPS Life Support Contingency Accommodations Plans for Experimental Testing
OTOS Presentation Contents Mission Requirements Mission Operations Architecture Design Reference Missions Habitat Configuration CONOPS Life Support Contingency Accommodations Plans for Experimental Testing
Solar Sails for Exploration of the Interstellar Medium January 2015
 Solar Sails for Exploration of the Interstellar Medium January 2015 www.nasa.gov The Sails We Need* Size: 75,000 m 2 to 250,000 m 2 Areal density: ~ 1 gram/m 2 Able to survive close solar deployment (0.1
Solar Sails for Exploration of the Interstellar Medium January 2015 www.nasa.gov The Sails We Need* Size: 75,000 m 2 to 250,000 m 2 Areal density: ~ 1 gram/m 2 Able to survive close solar deployment (0.1
Department of Defense Space Test Program. Lt Chalie Galliand Cubesat Developers Workshop 2009
 Department of Defense Space Test Program Lt Chalie Galliand Cubesat Developers Workshop 2009 Agenda STP Background STP Enablers Rideshare Opportunities Summary 2 Agenda STP Background STP Enablers Rideshare
Department of Defense Space Test Program Lt Chalie Galliand Cubesat Developers Workshop 2009 Agenda STP Background STP Enablers Rideshare Opportunities Summary 2 Agenda STP Background STP Enablers Rideshare
2017 LOCKHEED MARTIN CORPORATION. ALL RIGHTS RESERVED
 1 Lockheed Martin (LM) Space Systems Software Product Line Focused organization (LM1000) Deep Space Heritage Avionics/SW leveraged for LM1000 product line solution Combined Commercial and Civil Space Organizations
1 Lockheed Martin (LM) Space Systems Software Product Line Focused organization (LM1000) Deep Space Heritage Avionics/SW leveraged for LM1000 product line solution Combined Commercial and Civil Space Organizations
Using STPA in the Design of a new Manned Spacecraft
 Using STPA in the Design of a new Manned Spacecraft Japan Aerospace Exploration Agency (JAXA) Ryo Ujiie 1 Contents Abstract Purpose JAXA s Manned Spacecraft (CRV) JAXA s Experience of STPA STPA in CRV
Using STPA in the Design of a new Manned Spacecraft Japan Aerospace Exploration Agency (JAXA) Ryo Ujiie 1 Contents Abstract Purpose JAXA s Manned Spacecraft (CRV) JAXA s Experience of STPA STPA in CRV
Cansat 2016 Environmental Testing Requirements
 Cansat 2016 Environmental Testing Requirements Version 1.2 8/5/2015 1 Table of Contents 1.0 Introduction...3 2.0 Drop Test...3 2.1 Drop Test Configuration...3 2.2 Drop Test Procedure...3 3.0 Vibration
Cansat 2016 Environmental Testing Requirements Version 1.2 8/5/2015 1 Table of Contents 1.0 Introduction...3 2.0 Drop Test...3 2.1 Drop Test Configuration...3 2.2 Drop Test Procedure...3 3.0 Vibration
CubeSat Balloon Drag Devices: Meeting the 25-Year De-Orbit Requirement
 CubeSat Balloon Drag Devices: Meeting the 25-Year De-Orbit Requirement Jerry K. Fuller, David Hinkley, and Siegfried W. Janson The Aerospace Corporation Physical Science Laboratories August, 2010 The Aerospace
CubeSat Balloon Drag Devices: Meeting the 25-Year De-Orbit Requirement Jerry K. Fuller, David Hinkley, and Siegfried W. Janson The Aerospace Corporation Physical Science Laboratories August, 2010 The Aerospace
Fuzing Innovations for Air Burst Munitions: A 25mm Case Study
 Fuzing Innovations for Air Burst Munitions: A 25mm Case Study Mark Tomes Program Manager 49 th Annual Fuze Conference April 2005 Presentation Outline This briefing will discuss the details of: ATK s IR&D
Fuzing Innovations for Air Burst Munitions: A 25mm Case Study Mark Tomes Program Manager 49 th Annual Fuze Conference April 2005 Presentation Outline This briefing will discuss the details of: ATK s IR&D
IAC-04-IAA DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER
 IAC-04-IAA-3.8.2 DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER Bas Lansdorp, MSc Delft University of Technology, The Netherlands bas.lansdorp@lr.tudelft.nl Prof. ir. H.M.J.R. Soemers
IAC-04-IAA-3.8.2 DESIGN OF A HIGH-TENSION ELASTICALLY DEFORMING SPACE TETHER DEPLOYER Bas Lansdorp, MSc Delft University of Technology, The Netherlands bas.lansdorp@lr.tudelft.nl Prof. ir. H.M.J.R. Soemers
E Lightband Compression Tool Operating Procedure
 2002159E Lightband Compression Tool Operating Procedure Organization Name MLB Diameter MLB Assembly Number MLB Assembly Revision MLB Serial Number Instructions: IF LCTS ARE NOT YET INSTALLED ON LIGHTBAND:
2002159E Lightband Compression Tool Operating Procedure Organization Name MLB Diameter MLB Assembly Number MLB Assembly Revision MLB Serial Number Instructions: IF LCTS ARE NOT YET INSTALLED ON LIGHTBAND:
Assembly Instructions for STS-97 payload (P6 Truss)
") 2008 Assembly Instructions for STS-97 payload (P6 Truss) Familiarization with P6 Truss sides This is the FORWARD side of P6. It is the side that will be facing forward on top of the Z1 truss. Easily identified
2008 Assembly Instructions for STS-97 payload (P6 Truss) Familiarization with P6 Truss sides This is the FORWARD side of P6. It is the side that will be facing forward on top of the Z1 truss. Easily identified
DemoSat II Design Guidelines
 1. BALLOON DESCRIPTION AND CAPABILITIES This document defines key interfaces between the DemoSat teams and the Balloon for the purpose of establishing program responsibilities. 1.1 Balloon Interface General
1. BALLOON DESCRIPTION AND CAPABILITIES This document defines key interfaces between the DemoSat teams and the Balloon for the purpose of establishing program responsibilities. 1.1 Balloon Interface General
Team Members. Surrey Space Centre (SSC): Study lead, payloads, ADCS (with Prof. Bong Wie), SK platform, sail technologies
: Study lead, payloads, ADCS (with Prof. Bong Wie), SK platform, sail technologies") A Solar Kite Mission to Study the Earth's Magneto-tail Dr. Vaios Lappas C. Underwood, Luis M. Gomes, B. Wie C. McInnes, L. Tarabini, K. Wallace + 18th AIAA/USU Small Satellite Conference 18 AIAA/USU Small
A Solar Kite Mission to Study the Earth's Magneto-tail Dr. Vaios Lappas C. Underwood, Luis M. Gomes, B. Wie C. McInnes, L. Tarabini, K. Wallace + 18th AIAA/USU Small Satellite Conference 18 AIAA/USU Small
The Wave Glider: A Mobile Buoy Concept for Ocean Science. 009 Liquid Robotics Inc.
 The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
The Wave Glider: A Mobile Buoy Concept for Ocean Science 009 Liquid Robotics Inc. J. Manley & T. Richardson: Liquid Robotics Inc. DBCP XXV Paris September 28, 2009 1 Wave Glider Overview Unique Two Part
3-Way Decoking Valve Option - Installation and Operation Instructions Accessory G Background
 3-Way Decoking Valve Option - Installation and Operation Instructions Accessory G6600-60058 Background Accumulation of contaminants, such as column bleed, impurities in detector gases and even carbon from
3-Way Decoking Valve Option - Installation and Operation Instructions Accessory G6600-60058 Background Accumulation of contaminants, such as column bleed, impurities in detector gases and even carbon from
PRELIMINARY Presented at the SLSD 7S SORR 9/9/03
 PRELIMINARY Presented at the SLSD 7S SORR 9/9/03 Space and Life Sciences Directorate ISS Flight 7 Soyuz Stage Operations Readiness Review Certification of Flight Readiness September 24, 2003 J. B. Walters
PRELIMINARY Presented at the SLSD 7S SORR 9/9/03 Space and Life Sciences Directorate ISS Flight 7 Soyuz Stage Operations Readiness Review Certification of Flight Readiness September 24, 2003 J. B. Walters
BACKGROUND TO STUDY CASE
 BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
BACKGROUND TO STUDY CASE German Aerospace Center (DLR) is using Andøya Rocket Range for a sounding rocket campaign. On 27th October 2005 a 300 kg payload (SHEFEX) was launched Due do a technical problems
CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC SAILS
 CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC SAILS THE REASON? DISTANCE!!! CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC
CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC SAILS THE REASON? DISTANCE!!! CONVENTIONAL ROCKET PROPULSION NON-CONVENTIONAL PROPULSION SOLAR SAILS TETHERS ELECTRIC
TITAN 4. The Industry Standard for Seven-Function Dexterous Manipulators
 TITAN 4 Manipulator Systems The Industry Standard for Seven-Function Dexterous Manipulators Hundreds of TITAN 4 manipulator systems are in use worldwide every day. TITAN manipulators are the highest quality
TITAN 4 Manipulator Systems The Industry Standard for Seven-Function Dexterous Manipulators Hundreds of TITAN 4 manipulator systems are in use worldwide every day. TITAN manipulators are the highest quality
EUROBOT END-EFFECTORS
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT END-EFFECTORS S.Michaud (1),
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 EUROBOT END-EFFECTORS S.Michaud (1),
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances
 First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
First Experimental investigations on Wheel- Walking for improving Triple-Bogie rover locomotion performances M. Azkarate With the collaboration of ESA/TEC-MMA Table of Contents 2. The ExoTeR Rover: a Triple-Bogie
CHAPTER 10 SATELLITE DESIGN REQUIREMENTS
 CHAPTER 10 SATELLITE DESIGN REQUIREMENTS 10.1 Introduction This Chapter introduces the satellite design requirements from the launch vehicle compatibility perspective, which include load conditions, coupled
CHAPTER 10 SATELLITE DESIGN REQUIREMENTS 10.1 Introduction This Chapter introduces the satellite design requirements from the launch vehicle compatibility perspective, which include load conditions, coupled
Landsat 8's Emergency RMM
 Landsat 8's Emergency RMM A Quick-Turnaround Method Bob Scheid Landsat 8 Flight Operations KBRwyle Goddard Space Flight Center, MD November 5, 2016 Agenda Brief overview of Landsat s mission and command
Landsat 8's Emergency RMM A Quick-Turnaround Method Bob Scheid Landsat 8 Flight Operations KBRwyle Goddard Space Flight Center, MD November 5, 2016 Agenda Brief overview of Landsat s mission and command
SEAEYE FALCON & FALCON DR
 SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
SEAEYE FALCON & FALCON DR SEAEYE FALCON & FALCON DR The Seaeye Falcon and Falcon DR are the choice of many leading operators for capability, versatility and the ability to get the job done. Lightweight
Safety Policy and Requirements
 Safety Policy and Requirements NSTS 1700.7B ISS ADDENDUM For Payloads Using the International Space Station December 1995 National Aeronautics and Space Administration Lyndon B. Johnson Space Center Houston,
Safety Policy and Requirements NSTS 1700.7B ISS ADDENDUM For Payloads Using the International Space Station December 1995 National Aeronautics and Space Administration Lyndon B. Johnson Space Center Houston,
Saab Seaeye Cougar XT Compact
 The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
The Seaeye Cougar-XT Compact is a highly flexible and extremely powerful electric ROV with working depths of 300 metres. This system comes with almost all of the specifications of the very reliable Couger-XT
Water Reclamation MARYLAND. Fundamentals of water reclamation Water reclamation. Solids disposal. Potable Hygiene Urine U N I V E R S I T Y O F
 Fundamentals of water reclamation Water reclamation Potable Hygiene Urine Solids disposal 1 2011 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu ISS Consumables Budget Consumable Design
Fundamentals of water reclamation Water reclamation Potable Hygiene Urine Solids disposal 1 2011 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu ISS Consumables Budget Consumable Design
Habitability (continued)
") Habitability (continued) Required Crew Volumes Human Physiological Adaptation to 0G Workstation Design Restraint Design Ideal Cabin Layout Habitability in Partial Gravity Stowage Various Examples 106 2017
Habitability (continued) Required Crew Volumes Human Physiological Adaptation to 0G Workstation Design Restraint Design Ideal Cabin Layout Habitability in Partial Gravity Stowage Various Examples 106 2017
NSW Mines Rescue Unmanned Aerial Vehicle (UAV)
") NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
NSW Mines Rescue Unmanned Aerial Vehicle (UAV) 2015 IMRB Conference Hanover Emergency Response Q. Will the systems providing this required information remain operational once an incident occurs? Likely
Crew Systems Design Project Group A8. Chrissy Doeren Kip Hart Kiran Patel Alex Slafkosky
 Crew Systems Design Project Group A8 Chrissy Doeren Kip Hart Kiran Patel Alex Slafkosky Project Overview Objective: design a crewed spacecraft for a low cost lunar mission Crew: 3-95th percentile men Duration:
Crew Systems Design Project Group A8 Chrissy Doeren Kip Hart Kiran Patel Alex Slafkosky Project Overview Objective: design a crewed spacecraft for a low cost lunar mission Crew: 3-95th percentile men Duration:
WATER ROCK. Lawndart The rocket goes straight up and comes down nose first at high speed. Disadvantages
 Water Rocket Recovery Index What is a recovery system? A recovery system is a feature of a rocket that allows it to come back to Earth with minimal damage. Introduction This guide is intended to serve
Water Rocket Recovery Index What is a recovery system? A recovery system is a feature of a rocket that allows it to come back to Earth with minimal damage. Introduction This guide is intended to serve
Accelerate Your Riverbed SteelHead Deployment and Time to Value
 SteelHead Implementation Service Accelerate Your Riverbed SteelHead Deployment and Time to Value Proven Methodologies to Increase Adoption and Utilization Your organization has selected SteelHead appliances
SteelHead Implementation Service Accelerate Your Riverbed SteelHead Deployment and Time to Value Proven Methodologies to Increase Adoption and Utilization Your organization has selected SteelHead appliances
Self Propelled Hyperbaric Lifeboats. 12, 18 & 24-man
 Self Propelled Hyperbaric Lifeboats 12, 18 & 24-man Introduction JFD combines the capability, experience and history of Divex, James Fisher Defence, National Hyperbaric Centre and LEXMAR positioning itself
Self Propelled Hyperbaric Lifeboats 12, 18 & 24-man Introduction JFD combines the capability, experience and history of Divex, James Fisher Defence, National Hyperbaric Centre and LEXMAR positioning itself
Complex operations on the International Space Station training and execution in manned and unmanned situations
 Complex operations on the International Space Station in manned and unmanned situations Uwe.Muellerschkowski@esa.int Outline What makes ISS operations complex Operations based on procedures Astronaut training
Complex operations on the International Space Station in manned and unmanned situations Uwe.Muellerschkowski@esa.int Outline What makes ISS operations complex Operations based on procedures Astronaut training
Development of a Back Pressure Valve for the Spacesuit Water Membrane Evaporator (SWME)
") 45th 12-16 July 2015, Bellevue, Washington ICES-2015-338 Development of a Back Pressure Valve for the Spacesuit Water Membrane Evaporator (SWME) Brad Harris 1 and Thomas O. Leimkuehler 2 Paragon Space
45th 12-16 July 2015, Bellevue, Washington ICES-2015-338 Development of a Back Pressure Valve for the Spacesuit Water Membrane Evaporator (SWME) Brad Harris 1 and Thomas O. Leimkuehler 2 Paragon Space
Amendment 0001 Solicitation Number ONRBAA Long Endurance Undersea Vehicle Propulsion
 Amendment 0001 Solicitation Number ONRBAA11-016 Long Endurance Undersea Vehicle Propulsion The purpose of Amendment 0001 is to amend the BAA and respond to questions submitted prior to 13 APR 2011. Tables
Amendment 0001 Solicitation Number ONRBAA11-016 Long Endurance Undersea Vehicle Propulsion The purpose of Amendment 0001 is to amend the BAA and respond to questions submitted prior to 13 APR 2011. Tables
Escaping Gravity of the Sun
 Escaping Gravity of the Sun Escape Velocity In order to get to the moon, you have to escape the gravity of the earth. To get past Pluto you have to escape the gravity of the sun. The escape velocity of
Escaping Gravity of the Sun Escape Velocity In order to get to the moon, you have to escape the gravity of the earth. To get past Pluto you have to escape the gravity of the sun. The escape velocity of
College of Engineering
 College of Engineering Department of Mechanical and Aerospace Engineering MAE-250, Section 001 Introduction to Aerospace Engineering Final Project Bottle Rocket Written By: Jesse Hansen Connor Petersen
College of Engineering Department of Mechanical and Aerospace Engineering MAE-250, Section 001 Introduction to Aerospace Engineering Final Project Bottle Rocket Written By: Jesse Hansen Connor Petersen
LEADER SEARCH RADAR LIFE LOCATOR
 INTRODUCTION OF: Ultra Wide Band Victims detector & Locator V30.09.13.00 Product Concept i. The is designed to be simplistic in use whilst producing reliable and accurate information in the search for
INTRODUCTION OF: Ultra Wide Band Victims detector & Locator V30.09.13.00 Product Concept i. The is designed to be simplistic in use whilst producing reliable and accurate information in the search for
An effective approach for wide area detailed seabed mapping
 An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
An effective approach for wide area detailed seabed mapping Busan, 15th November 2017 11/15/2017 1 Ocean Infinity & Partner Proving a comprehensive seabed exploration system for water depth down to 6000
SAFE Europe: 30 th March 2010
 Martin-Baker Aircraft Company Ltd 2010. This copyrighted work contains Martin-Baker proprietary information and no part of this document may be reproduced, transmitted or used in any form or by any means
Martin-Baker Aircraft Company Ltd 2010. This copyrighted work contains Martin-Baker proprietary information and no part of this document may be reproduced, transmitted or used in any form or by any means
) Mark G. Benton, Sr. The Boeing Company. AIAA 2008 Joint Propulsion Conference Hartford, Connecticut July 23, 2008
 Mark G. Benton, Sr. The Boeing Company. AIAA 2008 Joint Propulsion Conference Hartford, Connecticut July 23, 2008") Crew and Cargo Landers for Human Exploration of Mars Vehicle System Design (AIAA-2008 2008-5156) The Boeing Company AIAA 2008 Joint Propulsion Conference Hartford, Connecticut July 23, 2008 Slide 1 of
Crew and Cargo Landers for Human Exploration of Mars Vehicle System Design (AIAA-2008 2008-5156) The Boeing Company AIAA 2008 Joint Propulsion Conference Hartford, Connecticut July 23, 2008 Slide 1 of
Management of a university satellite program with focus on a refrigerant-based propulsion system
 Scholars' Mine Masters Theses Student Research & Creative Works Fall 2010 Management of a university satellite program with focus on a refrigerant-based propulsion system Shawn W. Miller Follow this and
Scholars' Mine Masters Theses Student Research & Creative Works Fall 2010 Management of a university satellite program with focus on a refrigerant-based propulsion system Shawn W. Miller Follow this and
RoboHit TM Robofest 2017 Game
 RoboHit TM Robofest 2017 Game V1.7.1 Jan 27, 2017 (Frozen Official Version. Clarifications or updates after 1.7 are listed in Red) 1. Game Synopsis A ball-stand is located at the center of a white square
RoboHit TM Robofest 2017 Game V1.7.1 Jan 27, 2017 (Frozen Official Version. Clarifications or updates after 1.7 are listed in Red) 1. Game Synopsis A ball-stand is located at the center of a white square
Tether-based Robot Locomotion Experiments in REX-J mission
 Tether-based Robot Locomotion Experiments in REX-J mission H. Nakanishi*, M. Yamazumi*, S. Karakama*, M. Oda*, S. Nishida****, H. Kato**, K. Watanabe*, A. Ueta**, M. Yoshii***, S. Suzuki*** *Tokyo Institute
Tether-based Robot Locomotion Experiments in REX-J mission H. Nakanishi*, M. Yamazumi*, S. Karakama*, M. Oda*, S. Nishida****, H. Kato**, K. Watanabe*, A. Ueta**, M. Yoshii***, S. Suzuki*** *Tokyo Institute
WELCOME TO THE REVOLUTION
 USER GUIDE WELCOME TO THE REVOLUTION THANK YOU FOR CHOOSING THE GCQUAD We listened to what you wanted - and created the most accurate, versatile and game-enhancing ball and club analysis solution available
USER GUIDE WELCOME TO THE REVOLUTION THANK YOU FOR CHOOSING THE GCQUAD We listened to what you wanted - and created the most accurate, versatile and game-enhancing ball and club analysis solution available
Introduction to Habitability
 Introduction to Habitability Required Crew Volumes! Human Physiological Adaptation to 0G! Workstation Design! Restraint Design! Ideal Cabin Layout! Habitability in Partial Gravity! Stowage! Various Examples
Introduction to Habitability Required Crew Volumes! Human Physiological Adaptation to 0G! Workstation Design! Restraint Design! Ideal Cabin Layout! Habitability in Partial Gravity! Stowage! Various Examples
Proof of concept of a Bio-Containment System for Mars Sample Return Mission
 Proof of concept of a Bio-Containment System for Mars Sample Return Mission S. Senese (I), P. Magnani (I), A. Fumagalli (I), M. Colomba (I) A. Pedrini (II), D. Indrigo (II), A. Terribile (II), R. Ferrario
Proof of concept of a Bio-Containment System for Mars Sample Return Mission S. Senese (I), P. Magnani (I), A. Fumagalli (I), M. Colomba (I) A. Pedrini (II), D. Indrigo (II), A. Terribile (II), R. Ferrario
Initial Design of a Lightweight Mars Aircraft Mission
 Initial Design of a Lightweight Mars Aircraft Mission Lochie Ferrier This paper outlines the design of a CubeSat based mission for Mars observation using a lightweight unpowered fixed-wing aircraft. The
Initial Design of a Lightweight Mars Aircraft Mission Lochie Ferrier This paper outlines the design of a CubeSat based mission for Mars observation using a lightweight unpowered fixed-wing aircraft. The
Military & Submarine Rescue Systems. [Intro] Engineering Your Subsea Solutions. Overview. OceanWorks Intervention Systems
![Military & Submarine Rescue Systems. [Intro] Engineering Your Subsea Solutions. Overview. OceanWorks Intervention Systems](/thumbs/81/83254196.jpg "Military & Submarine Rescue Systems. [Intro] Engineering Your Subsea Solutions. Overview. OceanWorks Intervention Systems") Military Solutions Military & Submarine Rescue Systems Submarine Rescue - Intervention Systems [Intro] Engineering Your Subsea Solutions Overview OceanWorks International is an internationally recognized
Military Solutions Military & Submarine Rescue Systems Submarine Rescue - Intervention Systems [Intro] Engineering Your Subsea Solutions Overview OceanWorks International is an internationally recognized
SSC13-VII-10 INTRODUCTION
 SSC13-VII-10 Closed-loop thrust control in a MEMS-based micro propulsion module for CubeSats Pelle Rangsten, Kristoffer Palmer, Johan Bejhed, Ana Zaldivar Salaverri, Kerstin Jonsson, and Tor-Arne Grönland
SSC13-VII-10 Closed-loop thrust control in a MEMS-based micro propulsion module for CubeSats Pelle Rangsten, Kristoffer Palmer, Johan Bejhed, Ana Zaldivar Salaverri, Kerstin Jonsson, and Tor-Arne Grönland
2011 KIPR Autonomous Arial Vehicle Contest
 2011 KIPR Autonomous Arial Vehicle Contest Version 1.0 10/26/11 Table of Contents Notes... 3 Sponsors... 4 Goals of the 2011 KIPR Autonomous Aerial Vehicle Contest:... 5 This Year s Challenge... 5 Time
2011 KIPR Autonomous Arial Vehicle Contest Version 1.0 10/26/11 Table of Contents Notes... 3 Sponsors... 4 Goals of the 2011 KIPR Autonomous Aerial Vehicle Contest:... 5 This Year s Challenge... 5 Time
A Dual-Chamber Hybrid Inflatable Suitlock (DCIS) for Planetary Surfaces or Deep Space
 for Planetary Surfaces or Deep Space") 41st International Conference on Environmental Systems 17-21 July 2011, Portland, Oregon AIAA 2011-5064 A Dual-Chamber Hybrid Inflatable Suitlock (DCIS) for Planetary Surfaces or Deep Space A. Scott Howe,
41st International Conference on Environmental Systems 17-21 July 2011, Portland, Oregon AIAA 2011-5064 A Dual-Chamber Hybrid Inflatable Suitlock (DCIS) for Planetary Surfaces or Deep Space A. Scott Howe,
Canadian Advanced Nanospace experiment 7 (CanX-7) Mission Analysis, Payload Design and Testing. Barbara Shmuel
 Mission Analysis, Payload Design and Testing. Barbara Shmuel") Canadian Advanced Nanospace experiment 7 (CanX-7) Mission Analysis, Payload Design and Testing by Barbara Shmuel A thesis submitted in conformity with the requirements for the degree of Master of Applied
Canadian Advanced Nanospace experiment 7 (CanX-7) Mission Analysis, Payload Design and Testing by Barbara Shmuel A thesis submitted in conformity with the requirements for the degree of Master of Applied
Military Rescue Solutions
 Military Rescue Solutions Mission Driven Reliability Maneuverability ENGINEERING YOUR SUBSEA SOLUTIONS Military & Submarine Rescue Systems Engineering Your Military Rescue Solutions OceanWorks International
Military Rescue Solutions Mission Driven Reliability Maneuverability ENGINEERING YOUR SUBSEA SOLUTIONS Military & Submarine Rescue Systems Engineering Your Military Rescue Solutions OceanWorks International
EVA Extravehicular Activity Systems
 ISS Live! was developed at NASA s Johnson Space Center (JSC) under NASA Contracts NNJ14RA02C and NNJ11HA14C wherein the U.S. Government retains certain rights. Console Handbook EVA Extravehicular Activity
ISS Live! was developed at NASA s Johnson Space Center (JSC) under NASA Contracts NNJ14RA02C and NNJ11HA14C wherein the U.S. Government retains certain rights. Console Handbook EVA Extravehicular Activity
The Metal Shark 75 Endurance is a welded aluminum pilothouse catamaran specially designed for use as a law enforcement, port security, and fire
 The Metal Shark 75 Endurance is a welded aluminum pilothouse catamaran specially designed for use as a law enforcement, port security, and fire rescue response boat. Like all Metal Sharks, it may be fully
The Metal Shark 75 Endurance is a welded aluminum pilothouse catamaran specially designed for use as a law enforcement, port security, and fire rescue response boat. Like all Metal Sharks, it may be fully
Preliminary Cost Analysis MARYLAND. Cost Sources Vehicle-level Costing Heuristics Applications Learning Curves Program-Level Analysis
 Cost Sources Vehicle-level Costing Heuristics Applications Learning Curves Program-Level Analysis 2003 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Cost Analysis Direct Costs - directly
Cost Sources Vehicle-level Costing Heuristics Applications Learning Curves Program-Level Analysis 2003 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Cost Analysis Direct Costs - directly
IMPROVED XENON LOADING EQUIPMENT WITH LOADING CAPACITY UP TO 1200 KG FOR ALPHABUS
 IMPROVED XENON LOADING EQUIPMENT WITH LOADING CAPACITY UP TO 1200 KG FOR ALPHABUS Patrick BRAVAIS, Roland SALOME +, Cécile GELAS + * AIR LIQUIDE DTA + CNES Toulouse Abstract Plasmic propulsion systems
IMPROVED XENON LOADING EQUIPMENT WITH LOADING CAPACITY UP TO 1200 KG FOR ALPHABUS Patrick BRAVAIS, Roland SALOME +, Cécile GELAS + * AIR LIQUIDE DTA + CNES Toulouse Abstract Plasmic propulsion systems
Proposal For Balloon Satellite
 Proposal For Balloon Satellite Gear Heads Project: Giza Ashleigh Bailey Tiffany Flanagan Charles Vaughan Alex Paulson Zach Greenwood Gear heads 1 Mission Statement: We plan to design and build a satellite
Proposal For Balloon Satellite Gear Heads Project: Giza Ashleigh Bailey Tiffany Flanagan Charles Vaughan Alex Paulson Zach Greenwood Gear heads 1 Mission Statement: We plan to design and build a satellite
Robot motion by simultaneously wheel and leg propulsion
 Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Robot motion by simultaneously wheel and leg propulsion Aarne Halme, Ilkka Leppänen, Miso Montonen, Sami Ylönen Automation Technology Laboratory Helsinki University of Technology PL 5400, 02015 HUT, Finland
Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic
 Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic R. Tonnessen* (Petroleum Geo-Services) & T. Skadberg (Petroleum Geo- Services) SUMMARY
Focus on Operational Efficiency and Crew Safety - Introducing Advanced ROV Technology in Marine Towed Streamer Seismic R. Tonnessen* (Petroleum Geo-Services) & T. Skadberg (Petroleum Geo- Services) SUMMARY
The CompacSas BAH airlock is the ideal solution for transforming an existing door into an airlock
 CompacSas BAH Improved filtering for existing accesses Manual Attack Resistance Ballistic Resistance Access Flow Recyclable product Energy savings Models: CompacSas BAH IMPROVED FILTERING The CompacSas
CompacSas BAH Improved filtering for existing accesses Manual Attack Resistance Ballistic Resistance Access Flow Recyclable product Energy savings Models: CompacSas BAH IMPROVED FILTERING The CompacSas
A Novel Cold Gas Propulsion System for Nanosatellites and Picosatellites
 A Novel Cold Gas Propulsion System for Nanosatellites and Picosatellites David Hinkley This work was supported under The Aerospace Corporation's Independent Research and Development Program 1 The Need
A Novel Cold Gas Propulsion System for Nanosatellites and Picosatellites David Hinkley This work was supported under The Aerospace Corporation's Independent Research and Development Program 1 The Need
MLV Mast Series Sectional Tripod Mast, 10-34m (32-110ft)
") MLV Mast Series Sectional Tripod Mast, 10-34m (32-110ft) Overview Fully deployed heights of 10, 15, 20, 30 and 34m (32, 49, 65, 98 and 110ft) Heavy duty composite sectional tripod masts capable of supporting
MLV Mast Series Sectional Tripod Mast, 10-34m (32-110ft) Overview Fully deployed heights of 10, 15, 20, 30 and 34m (32, 49, 65, 98 and 110ft) Heavy duty composite sectional tripod masts capable of supporting
Gyro-Control of a Solar Sailing Satellite
 of a Solar Sailing Satellite Background by Hendrik W. Jordaan Willem H. Steyn Electronic Systems Laboratory Department of Electrical & Electronic Engineering Stellenbosch University January 20, 2017 Stellenbosch
of a Solar Sailing Satellite Background by Hendrik W. Jordaan Willem H. Steyn Electronic Systems Laboratory Department of Electrical & Electronic Engineering Stellenbosch University January 20, 2017 Stellenbosch
ESAIL D45.1 Final Report of Remote Unit Gas Thruster
 D45.1 Final Report of Remote Unit Gas Thruster Work Package: WP 45 Version: Version 1.2 Prepared by: NanoSpace AB, Kristoffer Palmer, Tor-Arne Grönland Time: Uppsala, November 8 th, 2013 Coordinating person:
D45.1 Final Report of Remote Unit Gas Thruster Work Package: WP 45 Version: Version 1.2 Prepared by: NanoSpace AB, Kristoffer Palmer, Tor-Arne Grönland Time: Uppsala, November 8 th, 2013 Coordinating person:
QUICK START GUIDE CB-450 DATA BUOY PLATFORM
 What s Included (1) Buoy hull with data well, 450 lb buoyancy (1) Buoy tower (3) 10W Solar panels (1) Data well lid (isic-cb or pass-through) (3) Top-side lifting eyes (3) Bottom-side mooring eyes (1)
What s Included (1) Buoy hull with data well, 450 lb buoyancy (1) Buoy tower (3) 10W Solar panels (1) Data well lid (isic-cb or pass-through) (3) Top-side lifting eyes (3) Bottom-side mooring eyes (1)
Qualification of the Inflatable Sunshield In Space (ISIS) Mast. David J. Rohweller * Abstract
 Mast. David J. Rohweller * Abstract") Qualification of the Inflatable Sunshield In Space (ISIS) Mast David J. Rohweller * Abstract The Inflatable Sunshield In Space (ISIS) mast, Figure 1, is a new telescopic mast that was successfully qualified
Qualification of the Inflatable Sunshield In Space (ISIS) Mast David J. Rohweller * Abstract The Inflatable Sunshield In Space (ISIS) mast, Figure 1, is a new telescopic mast that was successfully qualified
Avionics System Project. Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili
 Avionics System Project Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili Link Budgets for Communication Communication needs during the mission are divided into distinct phases,
Avionics System Project Team D3 Dylan Carter, Jesse Cummings, Kenneth Murphy, Rajesh Yalamanchili Link Budgets for Communication Communication needs during the mission are divided into distinct phases,
Vector. Pedal-based cycling power meter
 Vector 2 Pedal-based cycling power meter P = W t P = Power (Watts) W = Work (N-m, Joules) t = Change in time Pedal-based cycling power meter Power is an objective measure of your cycling performance on
Vector 2 Pedal-based cycling power meter P = W t P = Power (Watts) W = Work (N-m, Joules) t = Change in time Pedal-based cycling power meter Power is an objective measure of your cycling performance on
ASCENDERS ASCENDERS RUN UP THE WALL WITH 600 POUNDS ON THE LINE APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER
 APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER PN: AK-APA5 ELIMINATE THE CHALLENGE OF VERTICAL OBSTACLES Lightweight and powerful, the Atlas Devices APA-5 is a multi-mission
APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER APA-5 POWERED ROPE ASCENDER PN: AK-APA5 ELIMINATE THE CHALLENGE OF VERTICAL OBSTACLES Lightweight and powerful, the Atlas Devices APA-5 is a multi-mission
Scanning Sonar and ROV Operations. For Underwater SAR Imaging Applications
 Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
Scanning Sonar and ROV Operations For Underwater SAR Imaging Applications This training module provides information specific to integrating scanning sonar onto an ROV platform and fundamentals in using
WARM GAS PROPULSION FOR SMALL SATELLITES. J. R. French Propulsion Development Associates, Inc. ~1AlN HOUSING CATALY5THOUSP.\G C AT.
 The purpose of this activity is to quickly develop miniature warm gas thruster technology for application to next generation micro satellite systems and to provide an industrial source for this technology.
The purpose of this activity is to quickly develop miniature warm gas thruster technology for application to next generation micro satellite systems and to provide an industrial source for this technology.
The Mars Science Laboratory Flight Software A Platform for Science and Mobility
 The Mars Science Laboratory Flight Software A Platform for Science and Mobility Dr. Kathryn Anne Weiss, MSL FSW Jet Propulsion Laboratory, California Institute of Technology 2012 California Institute of
The Mars Science Laboratory Flight Software A Platform for Science and Mobility Dr. Kathryn Anne Weiss, MSL FSW Jet Propulsion Laboratory, California Institute of Technology 2012 California Institute of
Testing Readiness Review March 3, 2014
 Testing Readiness Review March 3, 2014 Ben Azlein, Chris Bennett, Kara Bongiovanni, Eric Brenner, Lea Harris, Austin Kootz, Stephanie Oij, Jason Schelz Customer: Barbara Streiffert, JPL PAB Advisor: Dr.
Testing Readiness Review March 3, 2014 Ben Azlein, Chris Bennett, Kara Bongiovanni, Eric Brenner, Lea Harris, Austin Kootz, Stephanie Oij, Jason Schelz Customer: Barbara Streiffert, JPL PAB Advisor: Dr.
The Quarter Pounder A Vehicle to Launch Quarter Pound Payloads to Low Earth Orbit
 The Quarter Pounder A Vehicle to Launch Quarter Pound Payloads to Low Earth Orbit Ed LeBouthillier 1 Contents Introduction... 3 Requirements... 4 Orbital Altitudes... 4 Orbital Velocities... 4 Summary...4
The Quarter Pounder A Vehicle to Launch Quarter Pound Payloads to Low Earth Orbit Ed LeBouthillier 1 Contents Introduction... 3 Requirements... 4 Orbital Altitudes... 4 Orbital Velocities... 4 Summary...4
Dräger ERS-Chamber Refuge Chambers
 Dräger ERS-Chamber Refuge Chambers Dräger Engineered Refuge Solutions (ERS) provide a safe haven for miners in emergency situations. The engineered chamber solution is fully customized to the individual
Dräger ERS-Chamber Refuge Chambers Dräger Engineered Refuge Solutions (ERS) provide a safe haven for miners in emergency situations. The engineered chamber solution is fully customized to the individual
QUICK START GUIDE CB-150 DATA BUOY PLATFORM
 What s Included (1) Buoy hull with data well, 150 lb buoyancy (1) Buoy tower (3) 6W Solar panels (1) Data well lid (isic-cb or pass-through) (3) Top-side lifting eyes (3) Bottom-side mooring eyes Common
What s Included (1) Buoy hull with data well, 150 lb buoyancy (1) Buoy tower (3) 6W Solar panels (1) Data well lid (isic-cb or pass-through) (3) Top-side lifting eyes (3) Bottom-side mooring eyes Common
56th Annual Fuze Conference Conference & Exhibition Event #2560 May 14-16, 2012 Baltimore, Maryland
 56th Annual Fuze Conference Conference & Exhibition Event #2560 May 14-16, 2012 Baltimore, Maryland Next Generation Fuzing for Next Generation Weapons Medium Caliber Ammunition Scalable Airburst Fuze Presented
56th Annual Fuze Conference Conference & Exhibition Event #2560 May 14-16, 2012 Baltimore, Maryland Next Generation Fuzing for Next Generation Weapons Medium Caliber Ammunition Scalable Airburst Fuze Presented