ELE 455/555 Computer System Engineering. Section 2 The Processor Class 4 Pipelining with Hazards
|
|
|
- Chad Carson
- 5 years ago
- Views:
Transcription
1 ELE 455/555 Computer System Engineering Section 2 The Processor Class 4 Pipelining with Hazards


2 Overview Simple Datapath 2 tj


3 Overview Pipeline Control 3 tj
4 Data Hazards Data Hazards sub $2,$1,$3 $2 =? sub $2, $1,$3 and $12,$2,$5 or $13,$6,$2 add $14,$2,$2 sw $15,100($2) 4 tj
5 Data Hazards Data Hazards sub $2,$1,$3 and $12,$2,$5 $2 =? sub $2, $1,$3 and $12,$2,$5 or $13,$6,$2 add $14,$2,$2 sw $15,100($2) 5 tj
6 Data Hazards Data Hazards or $13,$6,$2 and $12,$2,$5 sub $2,$1,$3 sub $2, $1,$3 and $12,$2,$5 or $13,$6,$2 add $14,$2,$2 sw $15,100($2) $2 =? 6 tj
7 Data Hazards Data Hazards or $13,$6,$2 and $12,$2,$5 sub $2,$1,$3 add $14,$2,$2 $2 =? sub $2, $1,$3 and $12,$2,$5 or $13,$6,$2 add $14,$2,$2 sw $15,100($2) 7 tj
8 Data Hazards Data Hazards add $14,$2,$2 or $13,$6,$2 and $12,$2,$5 sub $2,$1,$3 sw $15,100($2) $2 = val sub $2, $1,$3 and $12,$2,$5 or $13,$6,$2 add $14,$2,$2 sw $15,100($2) 8 tj
9 Data Hazards Data Hazards 9 tj

10 Data Hazards Forwarding 10 tj
11 Data Hazards Detecting the need for Forwarding Terminology: ID/EX.RegisterRs = register # whose value is found in register ID/EX from read data 1 in the register file ID/EX.RegisterRt = register # whose value is found in register ID/EX from read data 2 in the register file Eg. sub $2, $1, $3 // in execute stage ID/EX.RegisterRs = $1 ID/EX.RegisterRt = $3 EX/MEM.RegisterRd= destination register # whose value is found in register EX/MEM MEM/WB.RegisterRd= destination register # whose value is found in register MEM/WB 11 tj
12 Data Hazards Detecting the need for Forwarding Conditions: 1a) EX/MEM.RegisterRd = ID/EX.RegisterRs EX/MEM currently holds a value needed by an instruction about to enter EX 1b) ) EX/MEM.RegisterRd = ID/EX.RegisterRt EX/MEM currently holds a value needed by an instruction about to enter EX 2a) MEM/WB.RegisterRd = ID/EX.RegisterRs MEM/WB currently holds a value needed by an instruction about to enter EX 2b) MEM/WB.RegisterRd = ID/EX.RegisterRt MEM/WB currently holds a value needed by an instruction about to enter EX 12 tj
13 Data Hazards Detecting the need for Forwarding sub $2, $1,$3 and $12,$2,$5 or $13,$6,$2 add $14,$2,$2 sw $15,100($2) sub-and is a type 1a hazard and Rs ($2) needs result of sub (Rd in EX/MEM) sub-or is a type 2b hazard or Rt ($2) needs result from sub (Rd in MEM/WB) sub-add is not a hazard due to write/read policy 13 tj
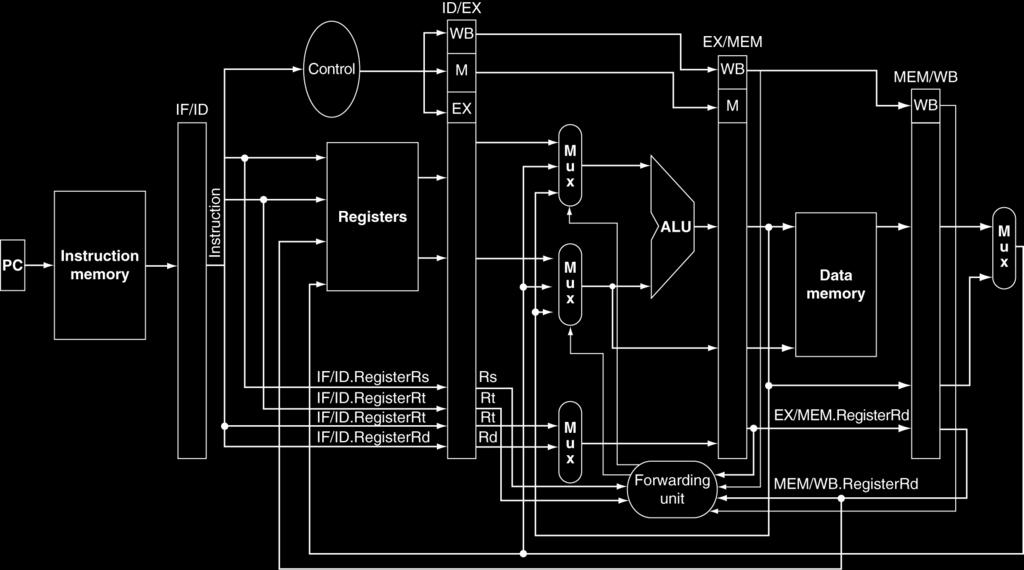
14 Data Hazards Implementing Forwarding Need Rd in EX/MEM and MEM/WB registers We are already doing this to support proper WB Need to multiplex the ALU output from EX/MEM and the WB output from MEM/WB into the ALU inputs Need control to manage the decision process Inputs: Rs, Rt, Rd from EX/MEM, Rd from MEM/WB aka: ID/EX.RegisterRs, ID/EX.RegisterRt, EX/MEM.RegisterRd, MEM/WB.RegisterRd) Outputs: ALU input mux control A, ALU input mux control B 14 tj


15 Data Hazards Implementing Forwarding 15 tj
16 Data Hazards Implementing Forwarding 2 additional conditions for forwarding Only forward when a register write is part of the instruction Only forward when the register write is not to register $0 16 tj
17 Data Hazards Implementing Forwarding EX hazard if (EX/MEM.RegWrite and (EX/MEM.RegisterRd 0) and (EX/MEM.RegisterRd = ID/EX.RegisterRs)) ForwardA = 10 if (EX/MEM.RegWrite and (EX/MEM.RegisterRd 0) and (EX/MEM.RegisterRd = ID/EX.RegisterRt)) ForwardB = 10 MEM hazard if (MEM/WB.RegWrite and (MEM/WB.RegisterRd 0) and (MEM/WB.RegisterRd = ID/EX.RegisterRs)) ForwardA = 01 if (MEM/WB.RegWrite and (MEM/WB.RegisterRd 0) and (MEM/WB.RegisterRd = ID/EX.RegisterRt)) ForwardB = tj
18 Data Hazards Implementing Forwarding 1 more condition Double Data Hazard add $1,$1,$2 add $1,$1,$3 add $1,$1,$4 Both hazards occur Want to use the most recent Revise MEM hazard condition Only forward if EX hazard condition isn t true 18 tj
19 Data Hazards Implementing Forwarding EX hazard if (EX/MEM.RegWrite and (EX/MEM.RegisterRd 0) and (EX/MEM.RegisterRd = ID/EX.RegisterRs)) ForwardA = 10 if (EX/MEM.RegWrite and (EX/MEM.RegisterRd 0) and (EX/MEM.RegisterRd = ID/EX.RegisterRt)) ForwardB = 10 MEM hazard if (MEM/WB.RegWrite and (MEM/WB.RegisterRd 0) and not (EX/MEM.RegWrite and (EX/MEM.RegisterRd 0) and (EX/MEM.RegisterRd = ID/EX.RegisterRs)) and (MEM/WB.RegisterRd = ID/EX.RegisterRs)) ForwardA = 01 if (MEM/WB.RegWrite and (MEM/WB.RegisterRd 0) and not (EX/MEM.RegWrite and (EX/MEM.RegisterRd 0) and (EX/MEM.RegisterRd = ID/EX.RegisterRt)) and (MEM/WB.RegisterRd = ID/EX.RegisterRt)) ForwardB = tj

20 Data Hazards Implementing Forwarding 20 tj
21 Stall Stalling the pipeline and inserting a bubble Consider a load-use hazard 21 tj
22 Stall Stalling the pipeline and inserting a bubble Load-use hazard Cannot be resolved with forwarding stall Check for a memory read value in an instruction in the execute stage Do this in the ID stage Load-use hazard: ID/EX.MemRead and ((ID/EX.RegisterRt = IF/ID.RegisterRs) or (ID/EX.RegisterRt = IF/ID.RegisterRt)) When true stall the pipeline 22 tj
23 Stall Stalling the pipeline and inserting a bubble Force the control values (for EX, MEM, and WB) to 0 in the ID/EX stage 0 for the control signals causes nothing to happen Prevent the PC from updating Prevent the IF/ID register from updating On next clock will reload the same value into IF/ID At the same time the LW instruction progresses to the MEM stage and the value is available to be forwarded 23 tj
24 Stall Stalling the pipeline and inserting a bubble 24 tj

25 Stall Stalling the pipeline and inserting a bubble 25 tj


26 Stall Stalling the pipeline and inserting a bubble 26 tj
27 Control Hazards Branch Hazard Consider the following code snippit beq $1, $3, skip and $13, $6, $2 add $14, $2, $2 skip lw $4, 50($7) The branch decision is known after the calculation of the branch address and the comparison (subtract and check for zero), and is available in the MEM stage If the branch is ignored we will have the and, add and lw instructions in the pipeline all is well If the branch is taken we will have the and, add and lw instructions in the pipeline but we do not want them to execute 27 tj

28 Control Hazards Branch Hazard 28 tj
29 Control Hazards Branch Hazard In our current implementation We assume branches are not taken We would need to flush the pipeline for taken branches Branch decision is available in the MEM stage Assuming the branch target is not already in the pipeline inserting 3 bubbles into the pipeline? How far can we move the decision forward to reduce the impact of taken branches 29 tj
30 Overview Pipeline Control 30 tj
31 Control Hazards Branch Hazard Most branches are simple comparisons equal all bits the same negative/positive look at msb We can move most of the branch prediction logic forward to the ID stage We have register values (some may be forwarded!) Need to modify the forwarding logic to account for branches We can move the branch address calculation forward to the ID stage Still have a single cycle stall IF of the next instruction is occurring in parallel with ID detection of the taken branch 31 tj
32 Control Hazards Branch Hazard Consider this code snippit sub $10, $4, $8 beq $1, $3, skip and $12, $2, $5 or $13, $2, $6 add $14, $4, $2 skip lw $4, 50($7) 32 tj


33 Control Hazards Branch Hazard skip 33 tj


34 Control Hazards Branch Hazard skip 34 tj


35 Control Hazards Branch Hazard This approach reduces the impact of branch hazards There may still be data hazards that cannot be avoided Branch dependent on ALU output from previous instruction add $4, $5, $6 beq $1, $4, skip during the beq ID stage, the add is in EX stage and $4 is not available 1 stall cycle 35 tj
36 Control Hazards Branch Hazard This approach reduces the impact of branch hazards There may still be data hazards that cannot be avoided Branch dependent on previous lw instruction lw $1, 50($7) beq $1, $4, skip the lw result will not be available until the MEM cycle is complete 2 stall cycles 36 tj
37 Control Hazards Branch Prediction For deeper pipelines the cost of missing a branch decision can be significant many clock cycles lost Leads to dynamic branch prediction Keep track if branch was previously taken or not Load either the next instruction or the target instruction based on prediction value 37 tj
38 Control Hazards Dynamic Branch Prediction 1 bit Use a small branch prediction buffer n words deep 1 bit of prediction value (1 bit word) n is derived from the PC value last 8 bits of PC 256 words deep The PC value references one of n predictions values Assuming a branch instruction Take the branch if the prediction value is set to 1 Don t take the branch if the prediction value is set to 0 If the prediction was wrong invert the prediction value 38 tj
39 Control Hazards Dynamic Branch Prediction 1 bit PC Branch Table ADDR B 0x x x x x tj
40 Control Hazards Dynamic Branch Prediction 1 bit Issues Multiple PC values point to the same branch table location over write each other wrong guesses Each incorrect guess can lead to 2 wrong guesses eg. Assume mostly loop back bit set to 1 when you do not loop back you stall and set bit to 0 next cycle you want to loop back but bit is 0 stall and set bit to 1 2 stalls 40 tj
41 Control Hazards Dynamic Branch Prediction 2 bit Use 2 bits to make prediction decisions Only change the prediction on 2 successive mispredictions Resolves the 2 stall issue of 1 bit prediction PC Branch Table ADDR B1 B0 0x x x x x tj

42 Control Hazards Dynamic Branch Prediction 2 bit 42 tj
43 Control Hazards Dynamic Branch Prediction n bit Use n bits to make prediction decisions Use a saturated up/down counter for each table entry Only change prediction when MSB toggles PC Branch Table ADDR B7 B6 B5 B4 B3 B2 B1 B0 0x x x x x tj
Outline Single Cycle Processor Design Multi cycle Processor. Pipelined Processor: Hazards and Removal. Instruction Pipeline. Time
 3/8/5 Pipelined Processor: Hazards and its Removal A. Sahu CSE, T Guwahati Please be updated with http://jatinga.iitg.ernet.in/~asahu/cs/ Outline Single Cycle Processor esign Multi cycle Processor Merging
3/8/5 Pipelined Processor: Hazards and its Removal A. Sahu CSE, T Guwahati Please be updated with http://jatinga.iitg.ernet.in/~asahu/cs/ Outline Single Cycle Processor esign Multi cycle Processor Merging
A Single Cycle Processor. ECE4680 Computer Organization and Architecture. Designing a Pipeline Processor. Overview of a Multiple Cycle Implementation
 ECE468 Computer Organization and Architecture Designing a Pipeline Processor A Single Cycle Processor Jump nstruction op Main nstruction : Fetch op 3 mm6 func 5 5 5 ctr 3 m Rw busw -bit
ECE468 Computer Organization and Architecture Designing a Pipeline Processor A Single Cycle Processor Jump nstruction op Main nstruction : Fetch op 3 mm6 func 5 5 5 ctr 3 m Rw busw -bit
CS3350B Computer Architecture. Lecture 6.2: Instructional Level Parallelism: Hazards and Resolutions
 CS3350B Compute Achitectue Winte 2015 Lectue 6.2: Instuctional Level Paallelism: Hazads and Resolutions Mac Moeno Maza www.csd.uwo.ca/couses/cs3350b [Adapted fom lectues on Compute Oganization and Design,
CS3350B Compute Achitectue Winte 2015 Lectue 6.2: Instuctional Level Paallelism: Hazads and Resolutions Mac Moeno Maza www.csd.uwo.ca/couses/cs3350b [Adapted fom lectues on Compute Oganization and Design,
Pipelined Implementation
 CS:APP Chapter 4 Computer Architecture Pipelined Implementation Randal E. Bryant adapted by Jason Fritts http://csapp.cs.cmu.edu CS:APP2e Overview General Principles of Pipelining Goal Difficulties Creating
CS:APP Chapter 4 Computer Architecture Pipelined Implementation Randal E. Bryant adapted by Jason Fritts http://csapp.cs.cmu.edu CS:APP2e Overview General Principles of Pipelining Goal Difficulties Creating
CS650 Computer Architecture. Lecture 5-1 Branch Hazards
 CS65 Computer Architecture Lecture 5- Branch Hazards Andrew Sohn Computer Science Department New Jersey Institute of Technology Lecture 5-: Branch Hazards 5--/6 /5/24 A. Sohn Simple 5-Stage Computer 4
CS65 Computer Architecture Lecture 5- Branch Hazards Andrew Sohn Computer Science Department New Jersey Institute of Technology Lecture 5-: Branch Hazards 5--/6 /5/24 A. Sohn Simple 5-Stage Computer 4
Lecture 7: Pipelined Implementation. James C. Hoe Department of ECE Carnegie Mellon University
 8 447 Lectre 7: Pipelined Implementation James C. Hoe Department of ECE Carnegie ellon University 8 447 S8 L7 S, James C. Hoe, CU/ECE/CALC, 28 Yor goal today 8 447 S8 L7 S2, James C. Hoe, CU/ECE/CALC,
8 447 Lectre 7: Pipelined Implementation James C. Hoe Department of ECE Carnegie ellon University 8 447 S8 L7 S, James C. Hoe, CU/ECE/CALC, 28 Yor goal today 8 447 S8 L7 S2, James C. Hoe, CU/ECE/CALC,
Data Hazards. Result does not feed back around in time for next operation Pipelining has changed behavior of system. Comb. logic A. R e g.
 ata Hazards Comb. logic A R e g Comb. logic B R e g Comb. logic C R e g OP1 A B C OP2 A B C OP3 A B C OP4 A B C Time Clock Result does not feed back around in time for next operation Pipelining has changed
ata Hazards Comb. logic A R e g Comb. logic B R e g Comb. logic C R e g OP1 A B C OP2 A B C OP3 A B C OP4 A B C Time Clock Result does not feed back around in time for next operation Pipelining has changed
CPE/EE 427, CPE 527 VLSI Design I L21: Sequential Circuits. Review: The Regenerative Property
 CPE/EE 427, CPE 527 VLSI esign I L21: Sequential Circuits epartment of Electrical and Computer Engineering University of Alabama in Huntsville Aleksandar Milenkovic ( www.ece.uah.edu/~milenka ) www.ece.uah.edu/~milenka/cpe527-5f
CPE/EE 427, CPE 527 VLSI esign I L21: Sequential Circuits epartment of Electrical and Computer Engineering University of Alabama in Huntsville Aleksandar Milenkovic ( www.ece.uah.edu/~milenka ) www.ece.uah.edu/~milenka/cpe527-5f
VLSI Design I; A. Milenkovic 1
 Review: The Regenerative Property V i V o V i V o CPE/EE 47, CPE 57 VLSI esign I : Sequential Circuits epartment of Electrical and Computer Engineering University of labama in Huntsville leksandar Milenkovic
Review: The Regenerative Property V i V o V i V o CPE/EE 47, CPE 57 VLSI esign I : Sequential Circuits epartment of Electrical and Computer Engineering University of labama in Huntsville leksandar Milenkovic
MICROPROCESSOR ARCHITECTURE
 MICROPROCESSOR ARCHITECTURE UOP S.E.COMP (SEM-I) PIPELINED ARCHITECTURE Prof.P.C.Patil Department of Computer Engg Matoshri College of Engg.Nasik pcpatil18@gmail.com. Bus Cycles of 80386 2 Bus Cycles of
MICROPROCESSOR ARCHITECTURE UOP S.E.COMP (SEM-I) PIPELINED ARCHITECTURE Prof.P.C.Patil Department of Computer Engg Matoshri College of Engg.Nasik pcpatil18@gmail.com. Bus Cycles of 80386 2 Bus Cycles of
Exercise 1: Control Functions
 Exercise 1: Control Functions EXERCISE OBJECTIVE When you have completed this exercise, you will be able to control the function of an asynchronous ripple counter. You will verify your results by operating
Exercise 1: Control Functions EXERCISE OBJECTIVE When you have completed this exercise, you will be able to control the function of an asynchronous ripple counter. You will verify your results by operating
SIDRA INTERSECTION 6.1 UPDATE HISTORY
 Akcelik & Associates Pty Ltd PO Box 1075G, Greythorn, Vic 3104 AUSTRALIA ABN 79 088 889 687 For all technical support, sales support and general enquiries: support.sidrasolutions.com SIDRA INTERSECTION
Akcelik & Associates Pty Ltd PO Box 1075G, Greythorn, Vic 3104 AUSTRALIA ABN 79 088 889 687 For all technical support, sales support and general enquiries: support.sidrasolutions.com SIDRA INTERSECTION
ECE 757. Homework #2
 ECE 757 Homework #2 Matt Ramsay 2/27/03 Problem 1 (5.3): a) Private Reads:.7 *.03 * 3 bus cycles =.063 bus cycles Private Writes:.2 *.03 * 5 bus cycles =.03 bus cycles Shared Reads:.08 *.05 * 3 bus cycles
ECE 757 Homework #2 Matt Ramsay 2/27/03 Problem 1 (5.3): a) Private Reads:.7 *.03 * 3 bus cycles =.063 bus cycles Private Writes:.2 *.03 * 5 bus cycles =.03 bus cycles Shared Reads:.08 *.05 * 3 bus cycles
VLSI Design 14. Memories
 Last module: Synthesis and Verilog This module Memory arrays SRMs Serial Memories Dynamic memories Memory rrays Memory rrays Random ccess Memory Serial ccess Memory Content ddressable Memory (CM) Read/Write
Last module: Synthesis and Verilog This module Memory arrays SRMs Serial Memories Dynamic memories Memory rrays Memory rrays Random ccess Memory Serial ccess Memory Content ddressable Memory (CM) Read/Write
Instruction Cache Compression for Embedded Systems by Yujia Jin and Rong Chen
 Instruction Cache Compression for Embedded Systems by Yujia Jin and Rong Chen Abstract Code compression could lead to less overall system die area and therefore less cost. This is significant in the embedded
Instruction Cache Compression for Embedded Systems by Yujia Jin and Rong Chen Abstract Code compression could lead to less overall system die area and therefore less cost. This is significant in the embedded
IA-64: Advanced Loads Speculative Loads Software Pipelining
 Presentation stolen from the web (with changes) from the Univ of Aberta and Espen Skoglund and Thomas Richards (47 alum) and Our textbook s authors : Advanced Loads Speculative Loads Software Pipelining
Presentation stolen from the web (with changes) from the Univ of Aberta and Espen Skoglund and Thomas Richards (47 alum) and Our textbook s authors : Advanced Loads Speculative Loads Software Pipelining
A 64 Bit Pipeline Based Decimal Adder Using a New High Speed BCD Adder
 A 64 Bit Pipeline Based Decimal Adder Using a New High Speed BCD Adder Rahul Jain 1, Khushboo Singh 2, Ghanshyam Jangid 3 1 Assistant Professor GIT College Jaipur, Rajasthan, India 2 M.Tech Student, Suresh
A 64 Bit Pipeline Based Decimal Adder Using a New High Speed BCD Adder Rahul Jain 1, Khushboo Singh 2, Ghanshyam Jangid 3 1 Assistant Professor GIT College Jaipur, Rajasthan, India 2 M.Tech Student, Suresh
THE CANDU 9 DISTRffiUTED CONTROL SYSTEM DESIGN PROCESS
 THE CANDU 9 DISTRffiUTED CONTROL SYSTEM DESIGN PROCESS J.E. HARBER, M.K. KATTAN Atomic Energy of Canada Limited 2251 Speakman Drive, Mississauga, Ont., L5K 1B2 CA9900006 and M.J. MACBETH Institute for
THE CANDU 9 DISTRffiUTED CONTROL SYSTEM DESIGN PROCESS J.E. HARBER, M.K. KATTAN Atomic Energy of Canada Limited 2251 Speakman Drive, Mississauga, Ont., L5K 1B2 CA9900006 and M.J. MACBETH Institute for
RM-80 respiration monitor
 RM-80 respiration monitor User Manual September 18, 2015 0025-003M 950 North Hague Avenue Columbus, Ohio 43204-2121 USA Sales: sales@colinst.com Service: service@colinst.com Phone: (614) 276-0861 Fax:
RM-80 respiration monitor User Manual September 18, 2015 0025-003M 950 North Hague Avenue Columbus, Ohio 43204-2121 USA Sales: sales@colinst.com Service: service@colinst.com Phone: (614) 276-0861 Fax:
HW #5: Digital Logic and Flip Flops
 HW #5: Digital Logic and Flip Flops This homework will walk through a specific digital design problem in all its glory that you will then implement in this weeks lab. 1 Write the Truth Table (10 pts) Consider
HW #5: Digital Logic and Flip Flops This homework will walk through a specific digital design problem in all its glory that you will then implement in this weeks lab. 1 Write the Truth Table (10 pts) Consider
Perfect Game Baseball - msherwood pseudo code backbone Using MVC Convention (Model/View/Controller) With Multimodal I/O
 With Multimodal I/O") Perfect Game Baseball - msherwood pseudo code backbone Using MVC Convention (Model/View/Controller) With Multimodal I/O Model: DataModel.h/c Use this to store the game states View: Buzzers.h/.c Output
Perfect Game Baseball - msherwood pseudo code backbone Using MVC Convention (Model/View/Controller) With Multimodal I/O Model: DataModel.h/c Use this to store the game states View: Buzzers.h/.c Output
If a player has only one match at the championship then the weighting is currently 80% the Final Dynamic and 20% the rating from his one match.
 About the NTRP Rating System: The NTRP rating system is very complex. In order to understand how this works many terms must be defined. Every industry has a terminology all its own. Sports are the same;
About the NTRP Rating System: The NTRP rating system is very complex. In order to understand how this works many terms must be defined. Every industry has a terminology all its own. Sports are the same;
Cover Page for Lab Report Group Portion. Boundary Layer Measurements
 Cover Page for Lab Report Group Portion Boundary Layer Measurements Prepared by Professor J. M. Cimbala, Penn State University Latest revision: 30 March 2012 Name 1: Name 2: Name 3: [Name 4: ] Date: Section
Cover Page for Lab Report Group Portion Boundary Layer Measurements Prepared by Professor J. M. Cimbala, Penn State University Latest revision: 30 March 2012 Name 1: Name 2: Name 3: [Name 4: ] Date: Section
FireHawk M7 Interface Module Software Instructions OPERATION AND INSTRUCTIONS
 FireHawk M7 Interface Module Software Instructions OPERATION AND INSTRUCTIONS WARNING THE WARRANTIES MADE BY MSA WITH RESPECT TO THE PRODUCT ARE VOIDED IF THE PRODUCT IS NOT USED AND MAINTAINED IN ACCORDANCE
FireHawk M7 Interface Module Software Instructions OPERATION AND INSTRUCTIONS WARNING THE WARRANTIES MADE BY MSA WITH RESPECT TO THE PRODUCT ARE VOIDED IF THE PRODUCT IS NOT USED AND MAINTAINED IN ACCORDANCE
An Efficient Code Compression Technique using Application-Aware Bitmask and Dictionary Selection Methods
 An Efficient Code Compression Technique using Application-Aware Bitmask and Selection Methods Seok-Won Seong sseong@cise.ufl.edu Prabhat Mishra prabhat@cise.ufl.edu Department of Computer and Information
An Efficient Code Compression Technique using Application-Aware Bitmask and Selection Methods Seok-Won Seong sseong@cise.ufl.edu Prabhat Mishra prabhat@cise.ufl.edu Department of Computer and Information
Lab 4: Root Locus Based Control Design
 Lab 4: Root Locus Based Control Design References: Franklin, Powell and Emami-Naeini. Feedback Control of Dynamic Systems, 3 rd ed. Addison-Wesley, Massachusetts: 1994. Ogata, Katsuhiko. Modern Control
Lab 4: Root Locus Based Control Design References: Franklin, Powell and Emami-Naeini. Feedback Control of Dynamic Systems, 3 rd ed. Addison-Wesley, Massachusetts: 1994. Ogata, Katsuhiko. Modern Control
THE PROBLEM OF ON-LINE TESTING METHODS IN APPROXIMATE DATA PROCESSING
 THE PROBLEM OF ON-LINE TESTING METHODS IN APPROXIMATE DATA PROCESSING A. Drozd, M. Lobachev, J. Drozd Odessa National Polytechnic University, Odessa National I.I.Mechnikov University, Odessa, Ukraine,
THE PROBLEM OF ON-LINE TESTING METHODS IN APPROXIMATE DATA PROCESSING A. Drozd, M. Lobachev, J. Drozd Odessa National Polytechnic University, Odessa National I.I.Mechnikov University, Odessa, Ukraine,
Domino DUEMMEGI. Domino. Communication Interface DFTS User s Manual. Release September 2007
 Domino Domino Communication Interface DFTS User s Manual Release 2.3 - September 2007 srl Via Longhena 4-20139 MILANO Tel. 02/57300377 - FAX 02/55213686 Domino - DFTS: User s Manual R.2.3 Index 1- INTRODUCTION...3
Domino Domino Communication Interface DFTS User s Manual Release 2.3 - September 2007 srl Via Longhena 4-20139 MILANO Tel. 02/57300377 - FAX 02/55213686 Domino - DFTS: User s Manual R.2.3 Index 1- INTRODUCTION...3
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas
 Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
Standard League Robot Soccer EV3 Compass Training Curriculum Brian Thomas RoboCup Junior Australia Inc Copyright 2018 1 Standard League Robot Soccer EV3 Compass Training Welcome! The aim of this curriculum
ME 4710 Motion and Control: Integrator Wind-up Reference: Franklin, Powell, Emami-Naeini, Feedback Control of Dynamic Systems, Prentice-Hall, 2002.
 ME 4710 Motion and Control: Integrator Wind-up Reference: Franklin, Powell, Emami-Naeini, Feedback Control of Dynamic Systems, Prentice-Hall, 2002. The system shown below is a model of a closed-loop hydraulic
ME 4710 Motion and Control: Integrator Wind-up Reference: Franklin, Powell, Emami-Naeini, Feedback Control of Dynamic Systems, Prentice-Hall, 2002. The system shown below is a model of a closed-loop hydraulic
Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions
 Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions CONTENTS (MODULE 3) Introduction...1 Purpose...1 Goals and Learning Outcomes...1 Organization
Module 3 Developing Timing Plans for Efficient Intersection Operations During Moderate Traffic Volume Conditions CONTENTS (MODULE 3) Introduction...1 Purpose...1 Goals and Learning Outcomes...1 Organization
USER MANUAL. Intelligent Diagnostic Controller IDC24-A IDC24-AF IDC24-AFL IDC24-F IDP24-A * IDP24-AF * IDP24-AFL * IDP24-F * 1/73
 USER MANUAL Intelligent Diagnostic Controller IDC24-A IDC24-AF IDC24-AFL IDC24-F IDP24-A * IDP24-AF * IDP24-AFL * IDP24-F * *) Require software ID: DID-SW-001 1/73 Table of contents 1 General... 3 1.1
USER MANUAL Intelligent Diagnostic Controller IDC24-A IDC24-AF IDC24-AFL IDC24-F IDP24-A * IDP24-AF * IDP24-AFL * IDP24-F * *) Require software ID: DID-SW-001 1/73 Table of contents 1 General... 3 1.1
SCIENTIFIC DATA SYSTEMS, INC. Depth Tension Line Speed Panel. DTLS Manual
 SCIENTIFIC DATA SYSTEMS, INC. Depth Tension Line Speed Panel DTLS Manual This document contains proprietary information. Copyright 2015 Scientific Data Systems, Inc. All rights reserved. 1 Depth Tension
SCIENTIFIC DATA SYSTEMS, INC. Depth Tension Line Speed Panel DTLS Manual This document contains proprietary information. Copyright 2015 Scientific Data Systems, Inc. All rights reserved. 1 Depth Tension
WINNING AND SCORE PREDICTOR (WASP) TOOL
 TOOL") WINNING AND SCORE PREDICTOR (WASP) TOOL Anik Shah 1, Dhaval Jha 2, Jaladhi Vyas 3 1,2 Department of Computer Science & Engineering, Nirma University, Ahmadabad, Gujarat, (India) ABSTRACT Winning and Score
WINNING AND SCORE PREDICTOR (WASP) TOOL Anik Shah 1, Dhaval Jha 2, Jaladhi Vyas 3 1,2 Department of Computer Science & Engineering, Nirma University, Ahmadabad, Gujarat, (India) ABSTRACT Winning and Score
[MYLAPS INTEGRATION]
![[MYLAPS INTEGRATION]](/thumbs/75/72535008.jpg "[MYLAPS INTEGRATION]") 2018 The Race Director MyLaps Integration Manual [MYLAPS INTEGRATION] This document explains how to manage the results data between your MyLaps readers and Race Director using manual file transfers. Contents
2018 The Race Director MyLaps Integration Manual [MYLAPS INTEGRATION] This document explains how to manage the results data between your MyLaps readers and Race Director using manual file transfers. Contents
Safety Critical Systems
 Safety Critical Systems Mostly from: Douglass, Doing Hard Time, developing Real-Time Systems with UML, Objects, Frameworks And Patterns, Addison-Wesley. ISBN 0-201-49837-5 1 Definitions channel a set of
Safety Critical Systems Mostly from: Douglass, Doing Hard Time, developing Real-Time Systems with UML, Objects, Frameworks And Patterns, Addison-Wesley. ISBN 0-201-49837-5 1 Definitions channel a set of
A handy systematic method for data hazards detection in an instruction set of a pipelined microprocessor
 A hy systematic method for data hazards detection in an instruction set of a pipelined microprocessor Ahmed M Mahran Computer Systems Engineering Department, Faculty of Engineering, Alexria University,
A hy systematic method for data hazards detection in an instruction set of a pipelined microprocessor Ahmed M Mahran Computer Systems Engineering Department, Faculty of Engineering, Alexria University,
GOLT! RED LIGHT DISTRICT
 GOLT! RED LIGHT DISTRICT USER MANUAL v2.1 How RLD Works Signal Flow PROCESSOR The timing processor receives all clock signals and start stop commands. Its main function is to determine which timing signals
GOLT! RED LIGHT DISTRICT USER MANUAL v2.1 How RLD Works Signal Flow PROCESSOR The timing processor receives all clock signals and start stop commands. Its main function is to determine which timing signals
DAV CENTENARY COLLEGE, FARIDABAD
 DAV CENTENARY COLLEGE, FARIDABAD SUMMARY OF LESSION PLAN (JAN-18 TO APRIL-18) Name of Asst/Associate Professor : RASHMI VERMA Class & Section : BCA-2ND Semester Subject : Logical Organization of computer-ii
DAV CENTENARY COLLEGE, FARIDABAD SUMMARY OF LESSION PLAN (JAN-18 TO APRIL-18) Name of Asst/Associate Professor : RASHMI VERMA Class & Section : BCA-2ND Semester Subject : Logical Organization of computer-ii
Critical Systems Validation
 Critical Systems Validation Objectives To explain how system reliability can be measured and how reliability growth models can be used for reliability prediction To describe safety arguments and how these
Critical Systems Validation Objectives To explain how system reliability can be measured and how reliability growth models can be used for reliability prediction To describe safety arguments and how these
Fast Software-managed Code Decompression
 Fast Software-managed Code Decompression Charles Lefurgy and Trevor Mudge Advanced Computer Architecture Laboratory Electrical Engineering and Computer Science Dept. The University of Michigan, Ann Arbor
Fast Software-managed Code Decompression Charles Lefurgy and Trevor Mudge Advanced Computer Architecture Laboratory Electrical Engineering and Computer Science Dept. The University of Michigan, Ann Arbor
Spacecraft Simulation Tool. Debbie Clancy JHU/APL
 FSW Workshop 2011 Using Flight Software in a Spacecraft Simulation Tool Debbie Clancy JHU/APL debbie.clancy@jhuapl.edu 443-778-7721 Agenda Overview of RBSP and FAST Technical Challenges Dropping FSW into
FSW Workshop 2011 Using Flight Software in a Spacecraft Simulation Tool Debbie Clancy JHU/APL debbie.clancy@jhuapl.edu 443-778-7721 Agenda Overview of RBSP and FAST Technical Challenges Dropping FSW into
Dive Computer NEMO SPORT
 Nemo Sport Manuale d istruzioni User s Guide Bedienungsanleitung Manuel d utilisation Manual de instrucciones Manual de instruções Gebruikershandleiding Användarinstruktioner Οδηγίες χρήσης Käyttäjän Opas
Nemo Sport Manuale d istruzioni User s Guide Bedienungsanleitung Manuel d utilisation Manual de instrucciones Manual de instruções Gebruikershandleiding Användarinstruktioner Οδηγίες χρήσης Käyttäjän Opas
Reducing Code Size with Run-time Decompression
 Reducing Code Size with Run-time Decompression Charles Lefurgy, Eva Piccininni, and Trevor Mudge Advanced Computer Architecture Laboratory Electrical Engineering and Computer Science Dept. The University
Reducing Code Size with Run-time Decompression Charles Lefurgy, Eva Piccininni, and Trevor Mudge Advanced Computer Architecture Laboratory Electrical Engineering and Computer Science Dept. The University
Functional safety. Functional safety of Programmable systems, devices & components: Requirements from global & national standards
 Functional safety Functional safety of Programmable systems, devices & components: Requirements from global & national standards Matthias R. Heinze Vice President Engineering TUV Rheinland of N.A. Email
Functional safety Functional safety of Programmable systems, devices & components: Requirements from global & national standards Matthias R. Heinze Vice President Engineering TUV Rheinland of N.A. Email
Instruction Manual. BZ7002 Calibration Software BE
 Instruction Manual BZ7002 Calibration Software BE6034-12 Index _ Index Index... 2 Chapter 1 BZ7002 Calibration Software... 4 1. Introduction... 5 Chapter 2 Installation of the BZ7002... 6 2. Installation
Instruction Manual BZ7002 Calibration Software BE6034-12 Index _ Index Index... 2 Chapter 1 BZ7002 Calibration Software... 4 1. Introduction... 5 Chapter 2 Installation of the BZ7002... 6 2. Installation
Front-end Realization of ASIC for Traffic Light Control with Real Time Clock Synchronization
 Front-end Realization of ASIC for Traffic Light Control with Real Time Clock Synchronization Mukul Bhargava M.Tech Scholar Deptt. of Elex. & Instr., Shri G.S. Institute of technology, Indore-452003 (M.P.)
Front-end Realization of ASIC for Traffic Light Control with Real Time Clock Synchronization Mukul Bhargava M.Tech Scholar Deptt. of Elex. & Instr., Shri G.S. Institute of technology, Indore-452003 (M.P.)
Profile-driven Selective Code Compression
 Profile-driven Selective Code Compression Yuan Xie and Wayne Wolf Electrical Engineering Department Princeton University Princeton, NJ 08540, USA yuanxie,wolf@ee.princeton.edu Haris Lekatsas NEC USA 4
Profile-driven Selective Code Compression Yuan Xie and Wayne Wolf Electrical Engineering Department Princeton University Princeton, NJ 08540, USA yuanxie,wolf@ee.princeton.edu Haris Lekatsas NEC USA 4
SoundCast Design Intro
 SoundCast Design Intro Basic Design SoundCast and Daysim 3 Land use attributes Households & Individuals SoundCast DaySim Travel demand simulator Trips and Households, Excel Summary Sheets, EMME network
SoundCast Design Intro Basic Design SoundCast and Daysim 3 Land use attributes Households & Individuals SoundCast DaySim Travel demand simulator Trips and Households, Excel Summary Sheets, EMME network
Technical Bulletin, Communicating with Gas Chromatographs
 Last Updated: 13- July-2010 TB-080000C Technical Bulletin, Communicating with Gas Chromatographs OMNI FLOW COMPUTERS, INC. 12620 West Airport Boulevard, Suite 100 Sugar Land, Texas 77478 United States
Last Updated: 13- July-2010 TB-080000C Technical Bulletin, Communicating with Gas Chromatographs OMNI FLOW COMPUTERS, INC. 12620 West Airport Boulevard, Suite 100 Sugar Land, Texas 77478 United States
The Universal Translator
 The Universal Translator David Cornfield dcornfield@apm.com Accellera Systems Initiative 1 Traditional Agents A Agent A Agent Chip ~ s m d A ~ s m d A B Agent B Agent m ~ s d B m ~ s d B Unit Level Chip
The Universal Translator David Cornfield dcornfield@apm.com Accellera Systems Initiative 1 Traditional Agents A Agent A Agent Chip ~ s m d A ~ s m d A B Agent B Agent m ~ s d B m ~ s d B Unit Level Chip
State of Nevada Department of Transportation Materials Division METHOD OF TEST FOR SAND EQUIVALENT
 State of Nevada Department of Transportation Materials Division METHOD OF TEST FOR SAND EQUIVALENT SCOPE This test method is intended to determine the proportion of detrimental fines (dust or clay size
State of Nevada Department of Transportation Materials Division METHOD OF TEST FOR SAND EQUIVALENT SCOPE This test method is intended to determine the proportion of detrimental fines (dust or clay size
Specifications and information are subject to change without notice. Up-to-date address information is available on our website.
 www.smar.com Specifications and information are subject to change without notice. Up-to-date address information is available on our website. web: www.smar.com/contactus.asp LD302 - AssetView HMI LD302
www.smar.com Specifications and information are subject to change without notice. Up-to-date address information is available on our website. web: www.smar.com/contactus.asp LD302 - AssetView HMI LD302
C. Mokkapati 1 A PRACTICAL RISK AND SAFETY ASSESSMENT METHODOLOGY FOR SAFETY- CRITICAL SYSTEMS
 C. Mokkapati 1 A PRACTICAL RISK AND SAFETY ASSESSMENT METHODOLOGY FOR SAFETY- CRITICAL SYSTEMS Chinnarao Mokkapati Ansaldo Signal Union Switch & Signal Inc. 1000 Technology Drive Pittsburgh, PA 15219 Abstract
C. Mokkapati 1 A PRACTICAL RISK AND SAFETY ASSESSMENT METHODOLOGY FOR SAFETY- CRITICAL SYSTEMS Chinnarao Mokkapati Ansaldo Signal Union Switch & Signal Inc. 1000 Technology Drive Pittsburgh, PA 15219 Abstract
Exercise 2-2. Second-Order Interacting Processes EXERCISE OBJECTIVE DISCUSSION OUTLINE. The actual setup DISCUSSION
 Exercise 2-2 Second-Order Interacting Processes EXERCISE OBJECTIVE Familiarize yourself with second-order interacting processes and experiment with the finer points of controller tuning to gain a deeper
Exercise 2-2 Second-Order Interacting Processes EXERCISE OBJECTIVE Familiarize yourself with second-order interacting processes and experiment with the finer points of controller tuning to gain a deeper
User s Guide. Pressure Controller for liquid delivery systems
 Flow Control User s Guide Pressure Controller for liquid delivery systems Precise Pressure Control throughout the experiment Flow control Compatible with any perfusion system Ideal for Small Volume Delivery
Flow Control User s Guide Pressure Controller for liquid delivery systems Precise Pressure Control throughout the experiment Flow control Compatible with any perfusion system Ideal for Small Volume Delivery
[CROSS COUNTRY SCORING]
![[CROSS COUNTRY SCORING]](/thumbs/89/99405973.jpg "[CROSS COUNTRY SCORING]") 2018 The Race Director Guide [CROSS COUNTRY SCORING] This document describes the setup and scoring processes employed when scoring a cross country race with Race Director. Contents Intro... 3 Division
2018 The Race Director Guide [CROSS COUNTRY SCORING] This document describes the setup and scoring processes employed when scoring a cross country race with Race Director. Contents Intro... 3 Division
2. USER INSTRUCTION. Table of contents: Pg.1/14 N:\FAP-2000: LWP
 Pg.1/14 2. USER INSTRUCTION. Table of contents: 2.1 SHORT PANEL DESCRIPTION...... Pg.2 2.2 AUTOPILOT TAKE-OVER & MODE SELECTION....... Pg.3 2.3 AUTOPILOT FUNCTIONS....... Pg.3 2.4 THE SPECIAL FUNCTION
Pg.1/14 2. USER INSTRUCTION. Table of contents: 2.1 SHORT PANEL DESCRIPTION...... Pg.2 2.2 AUTOPILOT TAKE-OVER & MODE SELECTION....... Pg.3 2.3 AUTOPILOT FUNCTIONS....... Pg.3 2.4 THE SPECIAL FUNCTION
82C288 BUS CONTROLLER FOR PROCESSORS (82C C C288-8)
") BUS CONTROLLER FOR 80286 PROCESSORS (82C288-12 82C288-10 82C288-8) Y Provides Commands and Controls for Local and System Bus Y Wide Flexibility in System Configurations Y High Speed CHMOS III Technology
BUS CONTROLLER FOR 80286 PROCESSORS (82C288-12 82C288-10 82C288-8) Y Provides Commands and Controls for Local and System Bus Y Wide Flexibility in System Configurations Y High Speed CHMOS III Technology
Depth Conversion with ISMap
 Depth Conversion with ISMap Brian Russell July 5, 2012 Introduction This article will compare two different approaches to depth conversion between measured well depths and a map of seismic two-way travel-time
Depth Conversion with ISMap Brian Russell July 5, 2012 Introduction This article will compare two different approaches to depth conversion between measured well depths and a map of seismic two-way travel-time
SUPPLEMENT MATERIALS
 SUPPLEMENT MATERIALS This document provides the implementation details of LW-FQZip 2 and the detailed experimental results of the comparison studies. 1. Implementation details of LW-FQZip 2 LW-FQZip 2
SUPPLEMENT MATERIALS This document provides the implementation details of LW-FQZip 2 and the detailed experimental results of the comparison studies. 1. Implementation details of LW-FQZip 2 LW-FQZip 2
UNIVERSITY OF WATERLOO
 UNIVERSITY OF WATERLOO Department of Chemical Engineering ChE 524 Process Control Laboratory Instruction Manual January, 2001 Revised: May, 2009 1 Experiment # 2 - Double Pipe Heat Exchanger Experimental
UNIVERSITY OF WATERLOO Department of Chemical Engineering ChE 524 Process Control Laboratory Instruction Manual January, 2001 Revised: May, 2009 1 Experiment # 2 - Double Pipe Heat Exchanger Experimental
Lane changing and merging under congested conditions in traffic simulation models
 Urban Transport 779 Lane changing and merging under congested conditions in traffic simulation models P. Hidas School of Civil and Environmental Engineering, University of New South Wales, Australia Abstract
Urban Transport 779 Lane changing and merging under congested conditions in traffic simulation models P. Hidas School of Civil and Environmental Engineering, University of New South Wales, Australia Abstract
CS Lecture 5. Vidroha debroy. Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute
 CS 3353 Lecture 5 Vidroha debroy Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute Searching for a number Find a specific number 91-3 26 54 73
CS 3353 Lecture 5 Vidroha debroy Material adapted courtesy of Prof. Xiangnan Kong and Prof. Carolina Ruiz at Worcester Polytechnic Institute Searching for a number Find a specific number 91-3 26 54 73
Iteration: while, for, do while, Reading Input with Sentinels and User-defined Functions
 Iteration: while, for, do while, Reading Input with Sentinels and User-defined Functions This programming assignment uses many of the ideas presented in sections 6 and 7 of the course notes. You are advised
Iteration: while, for, do while, Reading Input with Sentinels and User-defined Functions This programming assignment uses many of the ideas presented in sections 6 and 7 of the course notes. You are advised
Lecture Topics. Overview ECE 486/586. Computer Architecture. Lecture # 9. Processor Organization. Basic Processor Hardware Pipelining
 EE 486/586 ompute chitectue Lectue # 9 asic Pocesso Hadwae Pipelining Refeence: ppendix : Section.1 Lectue Topics Sping 2015 Potland State Univesity Oveview Pocesso Oganization typical computing task consists
EE 486/586 ompute chitectue Lectue # 9 asic Pocesso Hadwae Pipelining Refeence: ppendix : Section.1 Lectue Topics Sping 2015 Potland State Univesity Oveview Pocesso Oganization typical computing task consists
Adam Equipment. DENSITY DETERMINATION KIT for AAA, ADA and ADP SERIES BALANCES OPERATOR S MANUAL
 Adam Equipment DENSITY DETERMINATION KIT for AAA, ADA and ADP SERIES BALANCES OPERATOR S MANUAL ADAM EQUIPMENT CO. LTD. pn. 3478 Rev. E1, September 2000 Adam Equipment Company 2000 Adam Equipment Company
Adam Equipment DENSITY DETERMINATION KIT for AAA, ADA and ADP SERIES BALANCES OPERATOR S MANUAL ADAM EQUIPMENT CO. LTD. pn. 3478 Rev. E1, September 2000 Adam Equipment Company 2000 Adam Equipment Company
SAPCON. User Manual. Capacitance Continuous Level Indicator. . Introduction. . General Description. . Principle of Operation. .
 User Manual Capacitance Continuous Level Indicator Comprehensive User s Manual. Introduction. General Description. Principle of Operation. Specifications. Connection Diagrams. Quick Calibration Chart.
User Manual Capacitance Continuous Level Indicator Comprehensive User s Manual. Introduction. General Description. Principle of Operation. Specifications. Connection Diagrams. Quick Calibration Chart.
Gas Module for Series GMS800
 Title Page SUPPLEMENTARY OPERATING INSTRUCTIONS Gas Module for Series GMS800 Components Application Information Operating Data Document Information Described Product Product name: Gas Module Basic device:
Title Page SUPPLEMENTARY OPERATING INSTRUCTIONS Gas Module for Series GMS800 Components Application Information Operating Data Document Information Described Product Product name: Gas Module Basic device:
An Architecture for Combined Test Data Compression and Abort-on-Fail Test
 An Architecture for Combined Test Data Compression and Abort-on-Fail Test Erik Larsson and Jon Persson Embedded Systems Laboratory Department of Computer and Information Science Linköpings Universitet,
An Architecture for Combined Test Data Compression and Abort-on-Fail Test Erik Larsson and Jon Persson Embedded Systems Laboratory Department of Computer and Information Science Linköpings Universitet,
KAPPA KWIZ BOWL - Game Play Rules The following are the rules and format for the Kappa Kwiz Bowl
 KAPPA KWIZ BOWL - Game Play Rules The following are the rules and format for the Kappa Kwiz Bowl Format/Game Overview 1. Kappa Kwiz Bowl is a question and answer game played between two teams of four players
KAPPA KWIZ BOWL - Game Play Rules The following are the rules and format for the Kappa Kwiz Bowl Format/Game Overview 1. Kappa Kwiz Bowl is a question and answer game played between two teams of four players
Shearwater GF Computer
 Shearwater GF Computer DANGER This computer is capable of calculating deco stop requirements. These calculations are at best a guess of the real physiological decompression requirements. Dives requiring
Shearwater GF Computer DANGER This computer is capable of calculating deco stop requirements. These calculations are at best a guess of the real physiological decompression requirements. Dives requiring
A 28nm SoC with a 1.2GHz 568nJ/ Prediction Sparse Deep-Neural-Network Engine with >0.1 Timing Error Rate Tolerance for IoT Applications
 A 28nm SoC with a 1.2GHz 568nJ/ Prediction Sparse Deep-Neural-Network Engine with >0.1 Timing Error Rate Tolerance for IoT Applications Paul Whatmough, S. K. Lee, H. Lee, S. Rama, D. Brooks, G.-Y. Wei
A 28nm SoC with a 1.2GHz 568nJ/ Prediction Sparse Deep-Neural-Network Engine with >0.1 Timing Error Rate Tolerance for IoT Applications Paul Whatmough, S. K. Lee, H. Lee, S. Rama, D. Brooks, G.-Y. Wei
Sequence of Operations
 MAGNUM Condensing Unit Software 5580 Enterprise Pkwy. Fort Myers, FL 33905 Office: 239-694-0089 Fax: 239-694-0031 Sequence of Operations MAGNUM Chiller V8 software www.mcscontrols.com MCS Total Solution
MAGNUM Condensing Unit Software 5580 Enterprise Pkwy. Fort Myers, FL 33905 Office: 239-694-0089 Fax: 239-694-0031 Sequence of Operations MAGNUM Chiller V8 software www.mcscontrols.com MCS Total Solution
Provably Secure Camouflaging Strategy for IC Protection
 Provably Secure Camouflaging Strategy for IC Protection Meng Li 1 Kaveh Shamsi 2 Travis Meade 2 Zheng Zhao 1 Bei Yu 3 Yier Jin 2 David Z. Pan 1 1 Electrical and Computer Engineering, University of Texas
Provably Secure Camouflaging Strategy for IC Protection Meng Li 1 Kaveh Shamsi 2 Travis Meade 2 Zheng Zhao 1 Bei Yu 3 Yier Jin 2 David Z. Pan 1 1 Electrical and Computer Engineering, University of Texas
CONTROL LOGIC DESCRIPTION DOCUMENT IC-410ND
 Configuration # : 41G20F0 CONTROL LOGIC DESCRIPTION DOCUMENT IC-410ND Input/output table: Inputs Qty Outputs Qty Inside Temperature Probe 3 Inflatable Balloon 8 Chimney Temperature Probe 1 Chimney Activator
Configuration # : 41G20F0 CONTROL LOGIC DESCRIPTION DOCUMENT IC-410ND Input/output table: Inputs Qty Outputs Qty Inside Temperature Probe 3 Inflatable Balloon 8 Chimney Temperature Probe 1 Chimney Activator
Modeling of Hydraulic Hose Paths
 Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 9-2002 Modeling of Hydraulic Hose Paths Kurt A. Chipperfield Iowa State University Judy M. Vance Iowa State
Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 9-2002 Modeling of Hydraulic Hose Paths Kurt A. Chipperfield Iowa State University Judy M. Vance Iowa State
Landsat 8's Emergency RMM
 Landsat 8's Emergency RMM A Quick-Turnaround Method Bob Scheid Landsat 8 Flight Operations KBRwyle Goddard Space Flight Center, MD November 5, 2016 Agenda Brief overview of Landsat s mission and command
Landsat 8's Emergency RMM A Quick-Turnaround Method Bob Scheid Landsat 8 Flight Operations KBRwyle Goddard Space Flight Center, MD November 5, 2016 Agenda Brief overview of Landsat s mission and command
Wire Buddy Manual IOpath Software
 Wire Buddy Manual IOpath Software Wire Buddy is a calculation reference tool for Electricians and Maintenance personnel. Wire Buddy was created for the Maintenance Electrician. There are many occasions
Wire Buddy Manual IOpath Software Wire Buddy is a calculation reference tool for Electricians and Maintenance personnel. Wire Buddy was created for the Maintenance Electrician. There are many occasions
Horse Farm Management s Report Writer. User Guide Version 1.1.xx
 Horse Farm Management s Report Writer User Guide Version 1.1.xx August 30, 2001 Before you start 3 Using the Report Writer 4 General Concepts 4 Running the report writer 6 Creating a new Report 7 Opening
Horse Farm Management s Report Writer User Guide Version 1.1.xx August 30, 2001 Before you start 3 Using the Report Writer 4 General Concepts 4 Running the report writer 6 Creating a new Report 7 Opening
Control System Nur Istianah-THP-FTP-UB-2014
 Control System Control System Control is the process of causing a system variable to conform to some desired value. Manual control Automatic control (involving machines only). A control system is an interconnection
Control System Control System Control is the process of causing a system variable to conform to some desired value. Manual control Automatic control (involving machines only). A control system is an interconnection
Using the UltraRAE. Firmware 2.35
 Using the UltraRAE Firmware 2.35 Training Agenda UltraRAE features Setting up the UltraRAE Turning on the UltraRAE Idle Operation RAE-Sep Tubes Prepping for a measurement Taking a measurement Alarm modes
Using the UltraRAE Firmware 2.35 Training Agenda UltraRAE features Setting up the UltraRAE Turning on the UltraRAE Idle Operation RAE-Sep Tubes Prepping for a measurement Taking a measurement Alarm modes
Savannah S100 ALD at SCIF, UC Merced Standard operating Procedure
 This document covers the procedure that should be followed for normal operation of the Cambridge NanoTech: Savannah S100 (Atomic Layer Deposition ALD). This tool is design to be used with whole 4inch wafers.
This document covers the procedure that should be followed for normal operation of the Cambridge NanoTech: Savannah S100 (Atomic Layer Deposition ALD). This tool is design to be used with whole 4inch wafers.
1) The loop is almost completely in the field. 2) The speed of the loop is tripled. 3) The field direction is reversed.
 The loop is almost completely in the field. 2) The speed of the loop is tripled. 3) The field direction is reversed.") EMI3A LMCT1: MOVING RECTANGULAR LOOPS AND UNIFORM MAGNETIC FIELDS-CURRENT A rectangular wire loop containing a one-ohm resistor (not shown) is being pulled at a constant speed v into a region in which
EMI3A LMCT1: MOVING RECTANGULAR LOOPS AND UNIFORM MAGNETIC FIELDS-CURRENT A rectangular wire loop containing a one-ohm resistor (not shown) is being pulled at a constant speed v into a region in which
EMI 3a: Moving Rectangular Loops and Uniform Magnetic Fields-Current... 2
 EMI 3a: Moving Rectangular Loops and Uniform Magnetic Fields-Current... 2 EMI3a RT1: Moving Rectangular Loops and Uniform Magnetic Fields-Current... 3 EMI3a RT2: Moving Rectangular Loops and Uniform Magnetic
EMI 3a: Moving Rectangular Loops and Uniform Magnetic Fields-Current... 2 EMI3a RT1: Moving Rectangular Loops and Uniform Magnetic Fields-Current... 3 EMI3a RT2: Moving Rectangular Loops and Uniform Magnetic
Courseware Sample F0
 Electric Power / Controls Courseware Sample 85303-F0 A ELECTRIC POWER / CONTROLS COURSEWARE SAMPLE by the Staff of Lab-Volt Ltd. Copyright 2009 Lab-Volt Ltd. All rights reserved. No part of this publication
Electric Power / Controls Courseware Sample 85303-F0 A ELECTRIC POWER / CONTROLS COURSEWARE SAMPLE by the Staff of Lab-Volt Ltd. Copyright 2009 Lab-Volt Ltd. All rights reserved. No part of this publication
Software Reliability 1
 Software Reliability 1 Software Reliability What is software reliability? the probability of failure-free software operation for a specified period of time in a specified environment input sw output We
Software Reliability 1 Software Reliability What is software reliability? the probability of failure-free software operation for a specified period of time in a specified environment input sw output We
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs
 Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
Intelligent Decision Making Framework for Ship Collision Avoidance based on COLREGs Seminar Trondheim June 15th 2017 Nordic Institute of Navigation Norwegian Forum for Autonomous Ships SINTEF Ocean, Trondheim
SIP 1000 OPERATION AND PROGRAMMING MANUAL
 SIP 1000 OPERATION AND PROGRAMMING MANUAL 1 Below, please find an illustration that will show you the major functions and components of the SIP 1000: Before the Programming is explained, on the next page
SIP 1000 OPERATION AND PROGRAMMING MANUAL 1 Below, please find an illustration that will show you the major functions and components of the SIP 1000: Before the Programming is explained, on the next page
Valve Communication Solutions Axiom
 Axiom Detect automated valve problems... before they shut down your process Reasons for Automated On/Off Valve Failures Monitor Fail Solenoid Fail Actuator Fail Coupling Break Too Slow Leaking Sticking
Axiom Detect automated valve problems... before they shut down your process Reasons for Automated On/Off Valve Failures Monitor Fail Solenoid Fail Actuator Fail Coupling Break Too Slow Leaking Sticking
Laboratory 2(a): Interfacing WiiMote. Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments)
: Interfacing WiiMote. Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments)") Laboratory 2(a): Interfacing WiiMote Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments) Instructors: Edward A. Lee Sanjit A. Seshia University of California, Berkeley EECS
Laboratory 2(a): Interfacing WiiMote Authors: Jeff C. Jensen (National Instruments) Trung N. Tran (National Instruments) Instructors: Edward A. Lee Sanjit A. Seshia University of California, Berkeley EECS
Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated Driving Systems
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Missing no Interaction Using STPA for Identifying Hazardous Interactions of Automated
Stand-Alone Bubble Detection System
 Instruction Sheet P/N Stand-Alone Bubble Detection System 1. Introduction The Bubble Detection system is designed to detect air-bubble induced gaps in a bead of material as it is being dispensed. When
Instruction Sheet P/N Stand-Alone Bubble Detection System 1. Introduction The Bubble Detection system is designed to detect air-bubble induced gaps in a bead of material as it is being dispensed. When
Section 10 - Hydraulic Analysis
 Section 10 - Hydraulic Analysis Methodology Documentation Functionality Summary Sizing Methodology Fixed/Resize Combined Flow Storm: Sizing as per d/d Structures.dat Storm vs. Sanitary Methodology HGL/EGL
Section 10 - Hydraulic Analysis Methodology Documentation Functionality Summary Sizing Methodology Fixed/Resize Combined Flow Storm: Sizing as per d/d Structures.dat Storm vs. Sanitary Methodology HGL/EGL
RESOLUTION MSC.137(76) (adopted on 4 December 2002) STANDARDS FOR SHIP MANOEUVRABILITY
 (adopted on 4 December 2002) STANDARDS FOR SHIP MANOEUVRABILITY") MSC 76/23/Add.1 RESOLUTION MSC.137(76) THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) of the Convention on the International Maritime Organization concerning the functions of the Committee, RECALLING
MSC 76/23/Add.1 RESOLUTION MSC.137(76) THE MARITIME SAFETY COMMITTEE, RECALLING Article 28(b) of the Convention on the International Maritime Organization concerning the functions of the Committee, RECALLING
MSD 96-Well MULTI-ARRAY and MULTI-SPOT Human Granulocyte Colony Stimulating Factor (hg-csf) Ultrasensitive Assay
 Ultrasensitive Assay") MSD 96-Well MULTI-ARRAY and MULTI-SPOT Human Granulocyte Colony Stimulating Factor (hg-csf) Ultrasensitive Assay Summary This assay measures Human Granulocyte Colony Stimulating Factor (G-CSF) in a 96-well
MSD 96-Well MULTI-ARRAY and MULTI-SPOT Human Granulocyte Colony Stimulating Factor (hg-csf) Ultrasensitive Assay Summary This assay measures Human Granulocyte Colony Stimulating Factor (G-CSF) in a 96-well
STICTION: THE HIDDEN MENACE
 STICTION: THE HIDDEN MENACE How to Recognize This Most Difficult Cause of Loop Cycling By Michel Ruel Reprinted with permission from Control Magazine, November 2000. (Most figures courtesy of ExperTune
STICTION: THE HIDDEN MENACE How to Recognize This Most Difficult Cause of Loop Cycling By Michel Ruel Reprinted with permission from Control Magazine, November 2000. (Most figures courtesy of ExperTune
How to use the PBM Flow Calculator Spreadsheet (V2.04)
") How to use the PBM Flow Calculator Spreadsheet (V2.04) o Navigate to the F:\Common\ENGINEERING\Common Design Calculations folder o o Open PBM FLOW CALC 2.04.xlsm On the title page, the version, version
How to use the PBM Flow Calculator Spreadsheet (V2.04) o Navigate to the F:\Common\ENGINEERING\Common Design Calculations folder o o Open PBM FLOW CALC 2.04.xlsm On the title page, the version, version
Valve Communication Solutions. Safety instrumented systems
 Safety instrumented systems Safety Instrumented System (SIS) is implemented as part of a risk reduction strategy. The primary focus is to prevent catastrophic accidents resulting from abnormal operation.
Safety instrumented systems Safety Instrumented System (SIS) is implemented as part of a risk reduction strategy. The primary focus is to prevent catastrophic accidents resulting from abnormal operation.
CT PET-2018 Part - B Phd COMPUTER APPLICATION Sample Question Paper
 CT PET-2018 Part - B Phd COMPUTER APPLICATION Sample Question Paper Note: All Questions are compulsory. Each question carry one mark. 1. Error detection at the data link layer is achieved by? [A] Bit stuffing
CT PET-2018 Part - B Phd COMPUTER APPLICATION Sample Question Paper Note: All Questions are compulsory. Each question carry one mark. 1. Error detection at the data link layer is achieved by? [A] Bit stuffing